OAK相机:自动或手动设置相机参数
OAK相机:自动或手动设置相机参数
- 硬件
- 软件
硬件
使用硬件如下:
- 4✖️ov9782相机
- OAK-FFC-4P驱动板
硬件接线参考博主的一篇博客:OAK相机:多相机硬件同步拍摄
软件
博主使用的是Ubuntu18.04系统,首先配置所需的python环境:
1、下载SDK软件包:
git clone https://gitee.com/oakchina/depthai.git
2、安装依赖:
python3 -m pip install -r depthai/requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
3、注意:在Linux平台并且第一次使用OAK需要配置udev规则
echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="03e7", MODE="0666"' | sudo tee /etc/udev/rules.d/80-movidius.rules
sudo udevadm control --reload-rules && sudo udevadm trigger
相关python API可参考官方文档:https://docs.luxonis.com/projects/api/en/latest/references/python/#
在此博主提供一个示例:四个相机通过硬件触发同步,使用ROS发布图像消息,并可以自动或手动设置相机参数,更多设置可参考官方文档的API加以修改,完整程序如下:
# -*- coding: utf-8 -*-
#!/usr/bin/env python3
import depthai as dai
import yaml
import cv2
assert cv2.__version__[0] == '4', 'The fisheye module requires opencv version >= 3.0.0'
import numpy as np
import globNAME_LIST = ['cama', 'camb', 'camc', 'camd']FPS = 20
AUTOSET = Truedef clamp(num, v0, v1):return max(v0, min(num, v1))class CameraArray:def __init__(self,fps=20):self.FPS = fpsself.RESOLUTION = dai.ColorCameraProperties.SensorResolution.THE_800_Pself.cam_list = ['cam_a', 'cam_b', 'cam_c', 'cam_d']self.cam_socket_opts = {'cam_a': dai.CameraBoardSocket.CAM_A,'cam_b': dai.CameraBoardSocket.CAM_B,'cam_c': dai.CameraBoardSocket.CAM_C,'cam_d': dai.CameraBoardSocket.CAM_D,}self.pipeline = dai.Pipeline()self.cam = {}self.xout = {}# colorself.controlIn = self.pipeline.create(dai.node.XLinkIn)self.controlIn.setStreamName('control')for camera_name in self.cam_list:self.cam[camera_name] = self.pipeline.createColorCamera()self.cam[camera_name].setResolution(self.RESOLUTION)if camera_name == 'cam_a': # ref triggerself.cam[camera_name].initialControl.setFrameSyncMode(dai.CameraControl.FrameSyncMode.OUTPUT)else: # other triggerself.cam[camera_name].initialControl.setFrameSyncMode(dai.CameraControl.FrameSyncMode.INPUT)self.cam[camera_name].setBoardSocket(self.cam_socket_opts[camera_name])self.xout[camera_name] = self.pipeline.createXLinkOut()self.xout[camera_name].setStreamName(camera_name)self.cam[camera_name].isp.link(self.xout[camera_name].input)self.cam[camera_name].setFps(self.FPS)self.config = dai.Device.Config()self.config.board.gpio[6] = dai.BoardConfig.GPIO(dai.BoardConfig.GPIO.OUTPUT, dai.BoardConfig.GPIO.Level.HIGH)self.device = dai.Device(self.config)def start(self):self.device.startPipeline(self.pipeline)self.output_queue_dict = {}for camera_name in self.cam_list:self.output_queue_dict[camera_name] = self.device.getOutputQueue(name=camera_name, maxSize=1, blocking=False)def read_data(self):output_img = {}output_ts = {}for camera_name in self.cam_list:output_data = self.output_queue_dict[camera_name].tryGet()if output_data is not None:timestamp = output_data.getTimestampDevice()img = output_data.getCvFrame()# img = cv2.rotate(img, cv2.ROTATE_180)output_img[camera_name] = imgoutput_ts[camera_name] = timestamp.total_seconds()# print(camera_name, timestamp, timestamp.microseconds, img.shape)else:# print(camera_name, 'No ouput')output_img[camera_name] = Noneoutput_ts[camera_name] = Nonereturn output_img, output_tsif __name__ == '__main__':import rospyfrom sensor_msgs.msg import Imagefrom std_msgs.msg import Headerclass CvBridge():def __init__(self):self.numpy_type_to_cvtype = {'uint8': '8U', 'int8': '8S', 'uint16': '16U','int16': '16S', 'int32': '32S', 'float32': '32F','float64': '64F'}self.numpy_type_to_cvtype.update(dict((v, k) for (k, v) in self.numpy_type_to_cvtype.items()))def dtype_with_channels_to_cvtype2(self, dtype, n_channels):return '%sC%d' % (self.numpy_type_to_cvtype[dtype.name], n_channels)def cv2_to_imgmsg(self, cvim, encoding = "passthrough"):img_msg = Image()img_msg.height = cvim.shape[0]img_msg.width = cvim.shape[1]if len(cvim.shape) < 3:cv_type = self.dtype_with_channels_to_cvtype2(cvim.dtype, 1)else:cv_type = self.dtype_with_channels_to_cvtype2(cvim.dtype, cvim.shape[2])if encoding == "passthrough":img_msg.encoding = cv_typeelse:img_msg.encoding = encodingif cvim.dtype.byteorder == '>':img_msg.is_bigendian = Trueimg_msg.data = cvim.tobytes()img_msg.step = len(img_msg.data) // img_msg.heightreturn img_msgbridge = CvBridge()img_pub_dict = {}rospy.init_node('camera_array', anonymous=True)rate = rospy.Rate(20)for camera_name in ['cam_a', 'cam_b', 'cam_c', 'cam_d']:img_pub_dict[camera_name] = rospy.Publisher('/img/'+str(camera_name), Image, queue_size=0)img_cnt_dict = {'cam_a':0, 'cam_b':0, 'cam_c':0, 'cam_d':0}camera_array = CameraArray(FPS)camera_array.start()controlQueue = camera_array.device.getInputQueue(camera_array.controlIn.getStreamName())if AUTOSET:ctrl = dai.CameraControl()ctrl.setAutoExposureEnable()ctrl.setAutoWhiteBalanceMode(dai.CameraControl.AutoWhiteBalanceMode.AUTO)controlQueue.send(ctrl)else:# Defaults and limits for manual focus/exposure controlsexpTime = 10000expMin = 1expMax = 33000sensIso = 100sensMin = 100sensMax = 1600wbManual = 3500expTime = clamp(expTime, expMin, expMax)sensIso = clamp(sensIso, sensMin, sensMax)print("Setting manual exposure, time:", expTime, "iso:", sensIso)ctrl = dai.CameraControl()ctrl.setManualExposure(expTime, sensIso)ctrl.setManualWhiteBalance(wbManual)controlQueue.send(ctrl)first_time_cam = Nonefirst_time_local = Nonewhile not rospy.is_shutdown():output_img, output_ts = camera_array.read_data()if first_time_cam is None and output_ts['cam_a'] is not None:first_time_cam = output_ts['cam_a']first_time_local = rospy.Time.now().to_sec()for key in output_img.keys():if output_img[key] is None:continueframe = output_img[key]# convertimg = bridge.cv2_to_imgmsg(undistorted_img, encoding="bgr8")img.header = Header()if first_time_cam is not None:ts = output_ts[key] - first_time_cam + first_time_localimg.header.stamp = rospy.Time.from_sec(ts)else:img.header.stamp = rospy.Time.now()img_pub_dict[key].publish(img)rate.sleep()
将程序拷贝到本地,运行程序python camera.py;输入rostopic list,查看话题名;打开Rviz查看图像输出。
相关文章:

OAK相机:自动或手动设置相机参数
OAK相机:自动或手动设置相机参数 硬件软件 硬件 使用硬件如下: 4✖️ov9782相机OAK-FFC-4P驱动板 硬件接线参考博主的一篇博客:OAK相机:多相机硬件同步拍摄 软件 博主使用的是Ubuntu18.04系统,首先配置所需的pytho…...

百家宴焕新上市,持续深耕100-300元价位段
执笔 | 尼 奥 编辑 | 古利特 4月8日,长江酒道曾在《百家宴谋划“晋级”之路,多措并举切分宴席市场“蛋糕”》一文中提到:“百家宴主力新品即将登场,市场政策灵活焕新。” 如今,百家宴新品及市场新政,正…...

Linux Debian12使用git将本地项目上传到码云(gitee)远程仓库
一、注册码云gitee账号 这个可以参考其他教程,本文不做介绍。 gitee官网:https://gitee.com/ 二、Linux Debian12安装git 如果Linux系统没有安装git,可以使用下面命令安装git sudo apt install git 三、gitee新建仓库 我这只做测试&…...
电子烟行业常用的英文表达
1. 电子烟的各种表达 a) 电子烟 i. Electronic-cigarette, ii. Electronic smoke, iii. electronic cigarettes iv. Electric cigarette, v. E-Cigarettes vi. e-cigarette, vii. e-Cig viii. E cigar,e-cigar 电子烟雪茄 2. 电子烟特指词汇及衍生 a) VAPE i. Vapo…...
【SpringMvc 丨跨域】
Spring MVC 支持跨域处理(CORS)。 CORS 简介处理CORS 过滤器CrossOrigin注解java配置xml配置 主页传送门:📀 传送 简介 跨域是指在浏览器的同源策略下,不能执行其他网站的脚本。它是由浏览器的安全限制造成的…...

【C语言】【strlen函数的使用与模拟实现】
1.strlen函数的使用和模拟实现 1.1使用: size_t strlen(const char* str)返回类型为无符号整型,参数是字符指针 计算的是字符串中到“\0"之前的字符个数 1.2模拟实现: 方法一:计数器式遍历 #include<stdio.h> #in…...

类和对象【基础概念】
全文目录 类的定义定义方式 类的访问限定符封装(面向对象的三大特性之一) 类对象模型类对象的存储方式类对象的大小计算 this指针this指针的特性**this指针可以为空吗?** 类的定义 在C中,C语言中的结构体struct中除了定义变量外还…...
)
如何测试生成式人工智能(AIGC)
简介:在人工智能日趋普及的今天,生成式人工智能(AIGC)已经成为不可忽视的一个分支。从自动化生成新闻、编写代码到图像和音频生成,AIGC几乎无处不在。但如何确保这些生成的内容达到预期标准、安全可靠,同时…...

机器学习算法详解3:逻辑回归
机器学习算法详解3:逻辑回归 前言 本系列主要对机器学习上算法的原理进行解读,给大家分享一下我的观点和总结。 本篇前言 本篇对逻辑回归的算法原理进行解读。 目录结构 文章目录 机器学习算法详解3:逻辑回归1. 引子2. sigmoid函数3. 原…...

linux命令集合
cd:切换文件路径 pwd:显示当前所处的路径 mkdir:创建目录比如mkdir test touch:创建一个空文件touch test.txt in:用于指定文件夹在另一个位置建立同步的链接in -s /lib/test1 /user/lj 在user目录下建立指向/lib/test1 目录的lj文件 cat:cat file(查看文件内…...
实现卓越供应链:RFID技术的革命性应用
在现代制造业中,供应链和物流的高效运作至关重要,它不仅影响着生产效率,还直接关系到企业的竞争力和客户满意度。为了应对这些挑战,越来越多的企业开始关注智能制造RFID智能设备,将其应用于供应链和物流管理࿰…...

从JVM角度看继承
从JVM角度看继承 最近重读了周志明老师的《深入理解JAVA虚拟机》一书,看完大有收获,但仍对继承情况下对象内存布局有所疑惑,所以查阅资料,结合本书进行分析 参考文档: 【深入理解JVM】:Java类继承关系中…...

基于Python和mysql开发的看图猜成语微信小程序(源码+数据库+程序配置说明书+程序使用说明书)
一、项目简介 本项目是一套基于Python和mysql开发的看图猜成语微信小程序,主要针对计算机相关专业的正在做毕设的学生与需要项目实战练习的Python学习者。 包含:项目源码、项目文档、数据库脚本等,该项目附带全部源码可作为毕设使用。 项目都…...
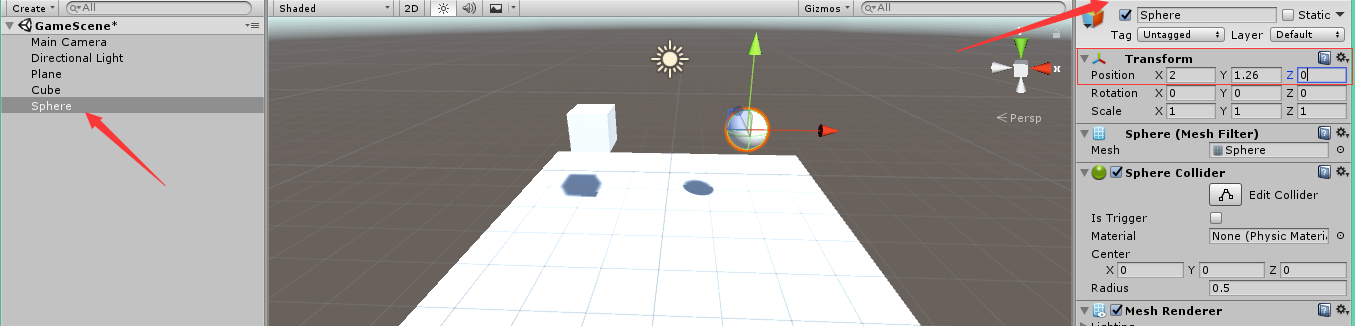
Unity入门教程||创建项目(上)
一、介绍 目的:通过尝试制作一款使用玩家角色把小球弹飞的简单小游戏,熟悉使用Unity进行游戏开发的基本流程。 软件环境:Unity 2017.3.0f3,Visual Studio 2013 二、创建新项目 1,启动Unity后将出现一个并列显示Pro…...

Openbmc编译
1.网址的问题解决 原文 Modifying /conf/local.conf was the only solution that worked for me. Simply add one of the two options:#check connectivity using google CONNECTIVITY_CHECK_URIS "https://www.google.com/"#skip connectivity checks CONNECTIVI…...

美国CN2服务器速度怎么样
美国服务器以免备案、大带宽、性价比高的优势,多用于企业、电商、外贸、视频等个中大型网站建设。但是,因中美服 务器接口原因,导致某些服务器的网络并不稳定,这时候就会对美国服务器产品失望,解决这种问题的方法就是选…...
K8S原理架构与实战教程
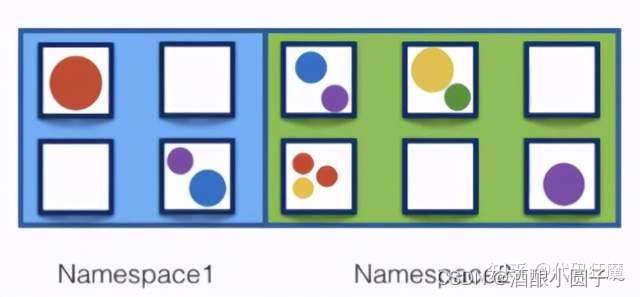
文章目录 一、背景1.1 物理机时代、虚拟机时代、容器化时代1.2 容器编排的需要 二、K8S架构2.2 Worker节点 三、核心概念3.1 Pod3.2 Deployment3.3 Service3.4 Volume3.5 Namespace 四、K8S安装五、kubectl常用命令六、K8S实战6.1 水平扩容6.2 自动装箱6.2.1 节点污点6.2.2 Pod…...

基于C#的图书管理系统数据库设计报告
第一章 问题描述 1.1 图书管理系统简介 本系统利用.NET处理数据库的功能,实现对图书馆信息的管理。主要功能为管理有关读者、出版社、书籍、借阅和管理者的信息等。 本系统的结构分为读者信息管理模块、出版社信息管理模块、书籍信息管理模块、借阅信息管理模块、…...

【Express.js】pm2进程管理
pm2进程管理 本节我们将介绍如何使用 pm2 运行和监管我们的 express 项目 准备工作 一个 express 项目全局安装 pm2 npm install -g pm2pm2使用介绍 启动应用 你可以用纯命令去运行一个node项目,假设原本运行项目使用 node src/index.js可以跑起来一个项目&am…...
Nginx部署前后端分离项目(Linux)
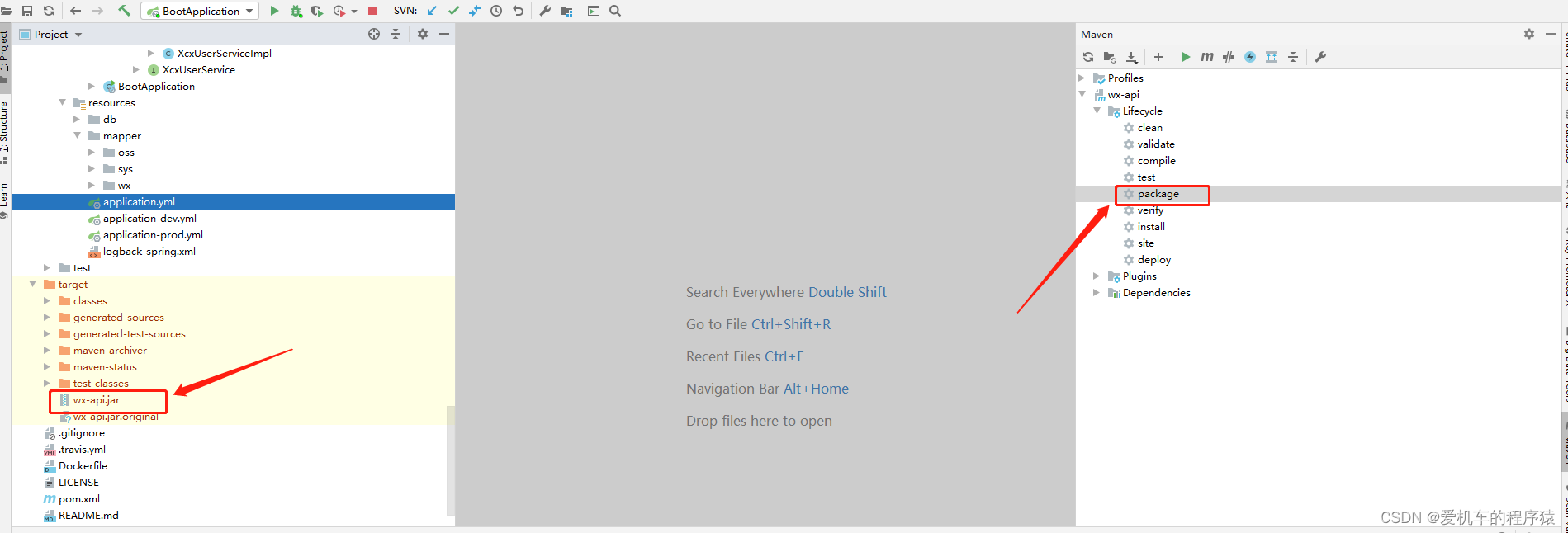
Nginx代理前端页面、后端接口 一、前端打包二、后端打包三、Linux部署Nginx启动、暂停、重启服务器部署文件地址: 一、前端打包 npm run build二、后端打包 通过Maven 使用package打包 三、Linux部署 安装Nginx 安装环境 yum -y install gcc pcre pcre-devel z…...

天龙八部GM工具终极指南:5步掌握高效游戏管理技巧
天龙八部GM工具终极指南:5步掌握高效游戏管理技巧 【免费下载链接】TlbbGmTool 某网络游戏的单机版本GM工具 项目地址: https://gitcode.com/gh_mirrors/tl/TlbbGmTool TlbbGmTool是一款专为《天龙八部》单机版本设计的专业游戏管理工具,为游戏管…...

从实战出发:解析墨水屏LUT移植与局刷参数调优的通用方法论
1. 墨水屏LUT基础认知:从"电子墨水"到驱动逻辑 第一次拆解墨水屏驱动板时,我盯着那些密密麻麻的电路走线和芯片引脚直发懵。直到把屏幕泡在酒精里不小心擦掉了表面涂层,才真正看清"电子墨水"的微观结构——那些悬浮在液体…...

膜结构工程:从方案设计到施工落地的完整解析
一、什么是膜结构工程,为什么这几年越来越常见膜结构工程,通常是指以膜材作为覆盖层,配合钢结构、索结构或支撑体系形成完整空间结构的工程形态。常见形式包括张拉膜结构、骨架式膜结构、充气膜结构等。和传统钢筋混凝土或普通彩钢建筑相比&a…...

数据库死锁的排查:从现象到根因
在软件测试工作中,数据库的稳定性和数据一致性是评估系统质量的关键维度。死锁问题,作为数据库并发控制中的“顽疾”,其随机性、隐蔽性和破坏性常常让测试人员感到棘手。它不仅是性能测试中的“拦路虎”,更可能在线上引发严重故障…...

YOLOE开源镜像生产环境部署:YOLOE-v8m-seg在Docker Swarm集群实践
YOLOE开源镜像生产环境部署:YOLOE-v8m-seg在Docker Swarm集群实践 1. 引言:从单机到集群的跨越 如果你已经体验过YOLOE官版镜像在单台服务器上的强大能力,比如用文本描述就能识别图片里的任何物体,或者用一张示例图就能完成精准…...

OpenClaw成本控制:Qwen3.5-9B任务拆分与Token节省策略
OpenClaw成本控制:Qwen3.5-9B任务拆分与Token节省策略 1. 为什么需要关注OpenClaw的Token消耗? 去年夏天,当我第一次在本地部署OpenClaw对接Qwen3.5-9B模型时,被一个简单的文件整理任务消耗了将近2000个Token。这让我意识到&…...

CSS如何实现不同尺寸的卡片网格_利用Grid跨行跨列设置
Grid卡片跨行跨列需用grid-row: span 2等语法避免线号计算错误;auto-fit需容器有明确宽度;高度不一致时宜用嵌套布局或grid-auto-rows: auto;IE11不支持现代Grid跨行,应降级方案。Grid卡片跨行跨列时,grid-row和grid-c…...

Windows更新修复利器:Reset Windows Update Tool终极使用指南
Windows更新修复利器:Reset Windows Update Tool终极使用指南 【免费下载链接】Reset-Windows-Update-Tool Troubleshooting Tool with Windows Updates (Developed in Dev-C). 项目地址: https://gitcode.com/gh_mirrors/re/Reset-Windows-Update-Tool Wind…...

效率革命:用快马平台统一管理python项目,告别重复环境配置
效率革命:用快马平台统一管理python项目,告别重复环境配置 作为一名长期使用PyCharm进行Python开发的程序员,我经常遇到一个令人头疼的问题:每次新建数据分析项目,都要重复配置Python环境、安装依赖包、设置虚拟环境。…...

OpenClaw技能开发入门:为Qwen3-14b_int4_awq定制自动化模块
OpenClaw技能开发入门:为Qwen3-14b_int4_awq定制自动化模块 1. 为什么需要自定义Skill 去年冬天,当我第一次尝试用OpenClaw自动整理电脑上的技术文档时,发现现有的通用技能无法完美匹配我的需求——我需要一个能理解Qwen3-14b_int4_awq模型…...