助力智能化公路养护,基于YOLOv5s集成SPD-BIFPN-SE开发构建公路开裂检测识别系统
在前文中我们尝试构建了在隧道、涵洞尝尽下的自动智能化养护巡查相关的模型,进行了实地测试评估,感兴趣的话可以自行移步阅读即可:
《基于轻量级YOLOv5s开发构建隧道基建裂痕、脱落等缺陷问题检测系统》
本文的想法是相近的,核心的目的是想要以公路养护场景为切入点,探索实践在自动巡航拍摄的视频图像数据基础上是否具备准确检测分析识别的能力。
首先看下效果图,如下所示:
接下来整体看下数据集情况,如下所示:
数据来源于实际巡航拍摄,为的就是真实数据来训练测试模型。
这里由于资源限制的问题,在初步版本的模型开发选型上,我们选择的是yolov5s系列的模型,原生模型文件如下所示:
# Parameters
nc: 1
depth_multiple: 0.33
width_multiple: 0.50anchors:- [10,13, 16,30, 33,23]- [30,61, 62,45, 59,119] - [116,90, 156,198, 373,326]backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
这里为了提升模型精度,我继承了前不久提出的spd-conv模块、BIFPN模块和SE注意力模块,这块的内容可以参考前面的博文,这里就不再赘述了,如下所示:
# Parameters
nc: 1 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# Backbone
backbone:# [from, number, module, args][[-1, 1, Focus, [64, 3]], # 0-P1/2[-1, 1, Conv, [128, 3, 1]], # 1[-1,1,SPD,[1]], # 2 -P2/4[-1, 3, C3, [128]], # 3[-1, 1, Conv, [256, 3, 1]], # 4[-1,1,SPD,[1]], # 5 -P3/8[-1, 6, C3, [256]], # 6[-1, 1, Conv, [512, 3, 1]], # 7-P4/16[-1,1,SPD,[1]], # 8 -P4/16[-1, 9, C3, [512]], # 9[-1, 1, Conv, [1024, 3, 1]], # 10-P5/32[-1,1,SPD,[1]], # 11 -P5/32[-1, 3, C3, [1024]], # 12[-1, 1, SPPF, [1024, 5]], # 13]# Head
head:[[-1, 1, Conv, [512, 1, 1]], #14[-1, 1, nn.Upsample, [None, 2, 'nearest']], #15[[-1, 9], 1, BiFPN, [256, 256]], #16 cat backbone P4[-1, 3, C3, [512, False]], #17[-1, 1, Conv, [256, 1, 1]], #18[-1, 1, nn.Upsample, [None, 2, 'nearest']], #19[[-1, 6], 1, BiFPN, [128, 128]], #20 cat backbone P3[-1, 3, C3, [256, False]], #21 [-1, 1, Conv, [512, 3, 2]], #22[[-1, 17, 9], 1, BiFPN, [256, 256]], #23 v5s通道数是默认参数的一半[-1, 3, C3, [512, False]], #24 [-1, 1, Conv, [512, 3, 2]], #25[[-1, 14], 1, BiFPN, [256, 256]], #26[-1, 3, C3, [1024, False]], #27 [-1, 1, SE, [1024]], #28[[21, 24, 28], 1, Detect, [nc, anchors]], #29 Detect(P3, P4, P5)]默认完全相同的训练参数,均执行100次epoch的迭代计算。
等待训练完成后,我们来整体对比分析下,如下所示:
【Precision曲线】
精确率曲线(Precision-Recall Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
绘制精确率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率和召回率。
将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率曲线。
根据精确率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察精确率曲线,我们可以根据需求确定最佳的阈值,以平衡精确率和召回率。较高的精确率意味着较少的误报,而较高的召回率则表示较少的漏报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
精确率曲线通常与召回率曲线(Recall Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。

【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。
召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
绘制召回率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的召回率和对应的精确率。
将每个阈值下的召回率和精确率绘制在同一个图表上,形成召回率曲线。
根据召回率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察召回率曲线,我们可以根据需求确定最佳的阈值,以平衡召回率和精确率。较高的召回率表示较少的漏报,而较高的精确率意味着较少的误报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
召回率曲线通常与精确率曲线(Precision Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。

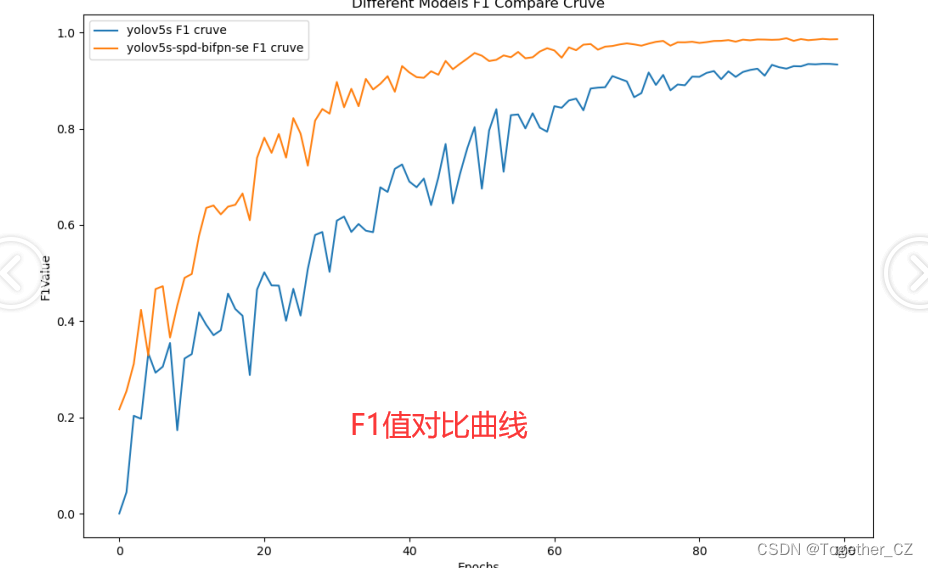
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。
F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
绘制F1值曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率、召回率和F1分数。
将每个阈值下的精确率、召回率和F1分数绘制在同一个图表上,形成F1值曲线。
根据F1值曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
F1值曲线通常与接收者操作特征曲线(ROC曲线)一起使用,以帮助评估和比较不同模型的性能。它们提供了更全面的分类器性能分析,可以根据具体应用场景来选择合适的模型和阈值设置。
整个训练过程中的loss对比曲线如下所示:
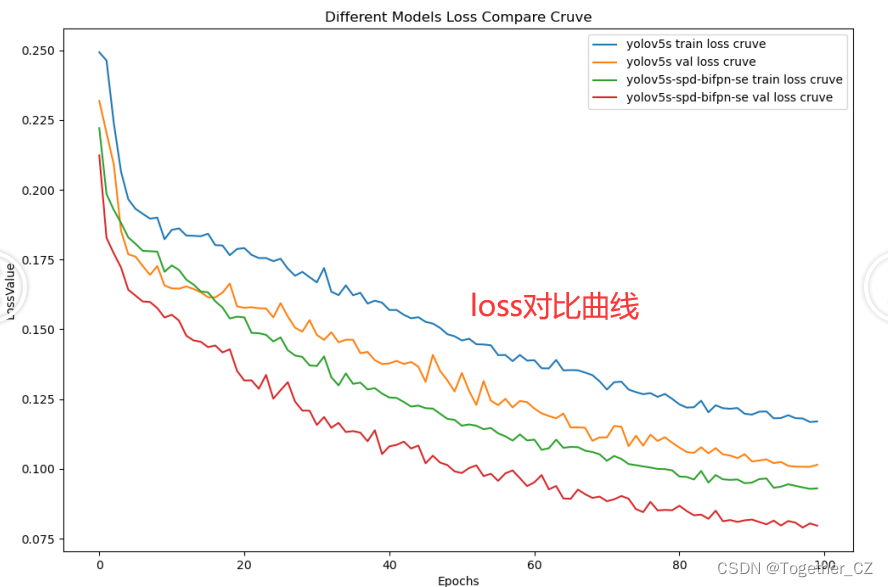
综合对比来看:经过改进后的s系列的模型要明显由于官方原生的模型精度。
很多时候大家也都可以根据实际场景下业务需求来针对性地进行一下适配改造,可能会有意想不到的效果。
相关文章:
助力智能化公路养护,基于YOLOv5s集成SPD-BIFPN-SE开发构建公路开裂检测识别系统
在前文中我们尝试构建了在隧道、涵洞尝尽下的自动智能化养护巡查相关的模型,进行了实地测试评估,感兴趣的话可以自行移步阅读即可: 《基于轻量级YOLOv5s开发构建隧道基建裂痕、脱落等缺陷问题检测系统》 本文的想法是相近的,核心…...
C++--day5
实现一个图形类(Shape),包含受保护成员属性:周长、面积, 公共成员函数:特殊成员函数书写 定义一个圆形类(Circle),继承自图形类,包含私有属性:半…...
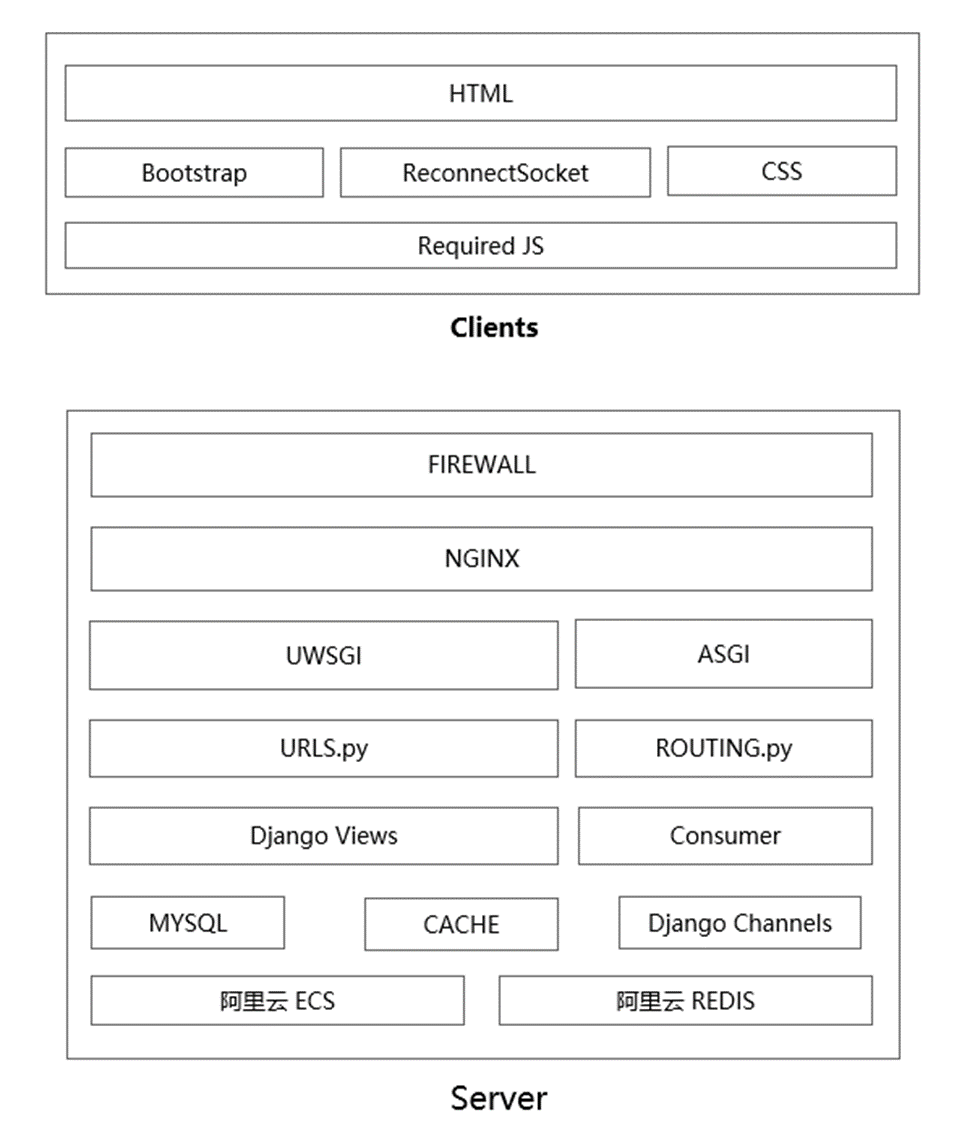
Django应用部署实战:从开发到生产,全程解析
部署架构图 版本说明 Centos 7.4 Python 3.6.4 Django 2.0.2 Channels 2.0.0 MySql 5.7 uWSGI Nginx 1.12.2 部署前 1、更新系统环境 yum install epel-release 2、安装所有的开发工具包 yum groupinstall -y “Development tools” 一、安装python 3.6.4 1、下载 cd /usr/…...
群晖NAS如何在内网部署HTTPS服务让浏览器信任证书
前言 最近在折腾内部部署Web服务。通过Vue实现一个H5的内部的管理服务。但在实际部署过程中由于种种原因,必须部署成Https服务。但在部署成Https服务后,由于没有HTTPS证书,每次进入页面都会被浏览器拦截。使用起来非常不便。于是开始各种Goo…...
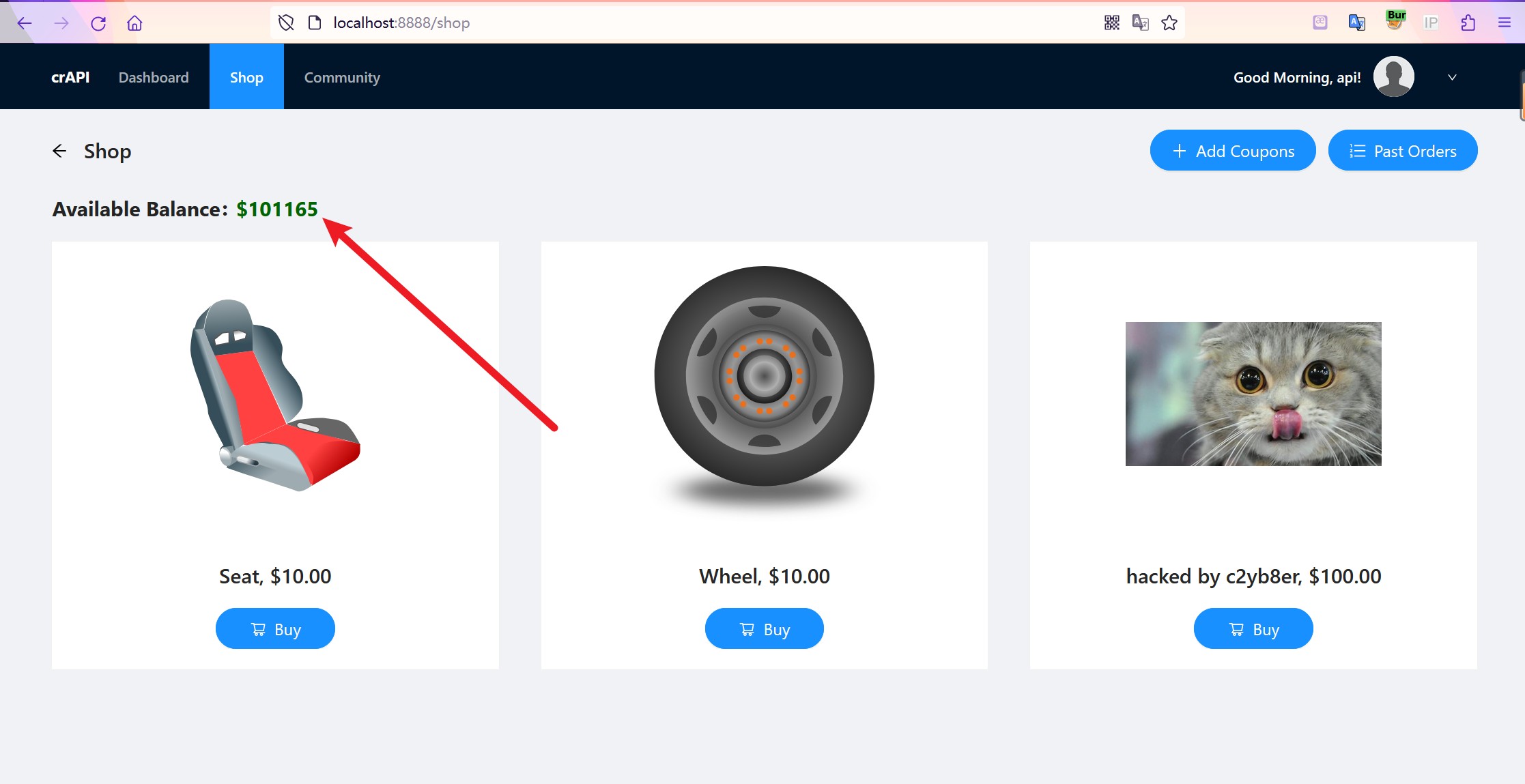
crAPI靶场学习记录
靶场搭建 [靶场下载地址](我fork了一份) docker安装,笔者是用的wsldocker. [lab0:**初始账户 **] 注册一个账户,邮箱为[APIqq.com],密码为Admin123 登陆后访问对应IP的8025端口,接收邮件获取车辆信息。 [lab1:**访问其它用户车…...

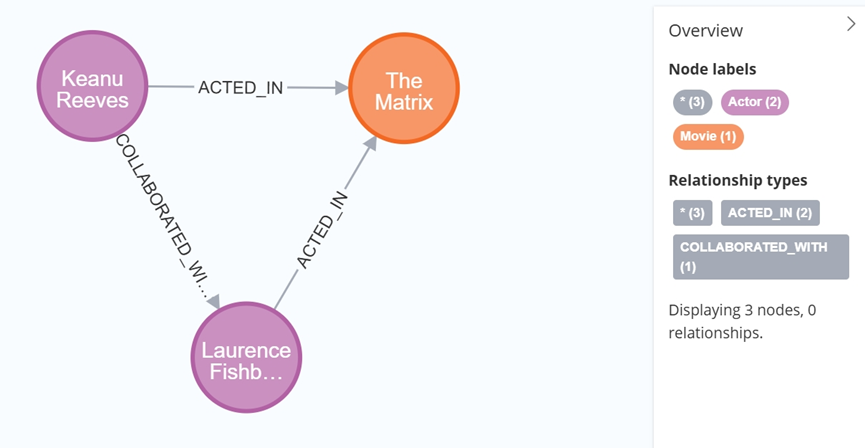
知识图谱实战应用28-基于py2neo的ICD-11疾病分类的知识图谱的查询与问答实战应用
大家好,我是微学AI,今天给大家介绍一下知识图谱实战应用28-基于py2neo的ICD-11疾病分类的知识图谱的查询与问答实战应用。使用基于py2neo的ICD-11疾病分类知识图谱,我们能够像探索一座生物医学宇宙般,穿梭在各种疾病之间。这个神奇的图谱可以帮助我们揭示各种疾病之间复杂而…...
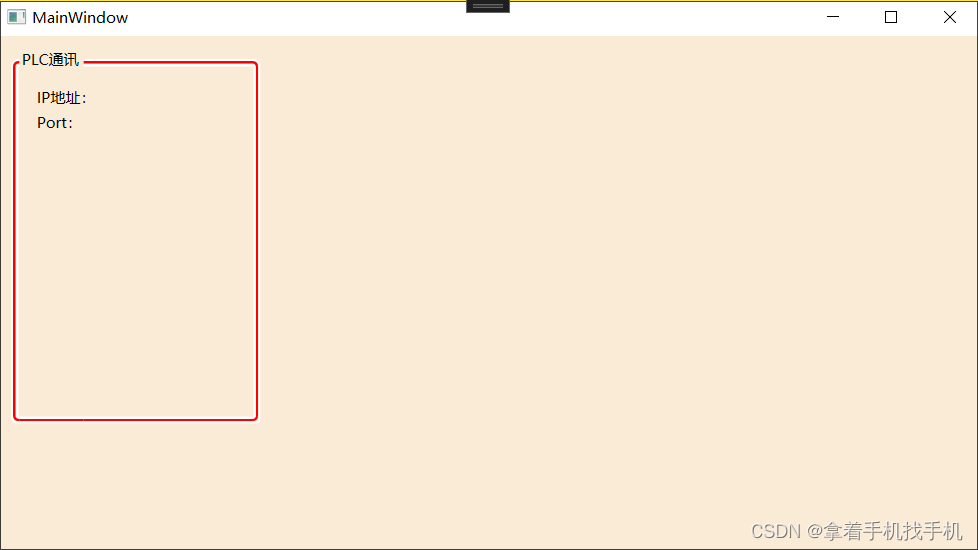
20.Xaml GroupBox控件 ---->带标题的内容控件
1.运行效果 2.运行源码 a.Xaml源码 <Window x:Class="testView.MainWindow"xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation"xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml"xmlns:d="http://schemas.mic…...

基于CycleGAN的山水风格画迁移
基于CycleGAN的山水风格画迁移 1、简介 1.1 研究背景及意义 绘画是人类重要的一种艺术形式,其中中国的山水画源远流长,具有丰富的美学内涵,沉淀着中国人的情思。游山玩水的大陆文化意识,以山为德、水为性的内在修为意识&#x…...

@Cacheable 注解
1. 功能说明 Cacheable 注解在方法上,表示该方法的返回结果是可以缓存的。也就是说,该方法的返回结果会放在缓存中,以便于以后使用相同的参数调用该方法时,会返回缓存中的值,而不会实际执行该方法。 注意,这…...
vue3+ts项目打包后的本地访问
注意:打包之后不可直接点击html访问,需要给项目安装本地服务! 1、安装servenpm i -g serve 2、打包项目npm run build 生成dist文件夹 3、本地访问serve dist 运行service dist之后的控制台 可复制下方的地址运行打包后的项目,运行…...
探索程序员需要掌握的算法?
文章目录 一:引言二:常见算法介绍三:重点算法总结 🎉欢迎来到数据结构学习专栏~探索程序员需要掌握的算法? ☆* o(≧▽≦)o *☆嗨~我是IT陈寒🍹✨博客主页:IT陈寒的博客🎈该系列文章…...
性能测试 —— Jmeter定时器
固定定时器 如果你需要让每个线程在请求之前按相同的指定时间停顿,那么可以使用这个定时器;需要注意的是,固定定时器的延时不会计入单个sampler的响应时间,但会计入事务控制器的时间 1、使用固定定时器位置在http请求中…...
mp4视频太大怎么压缩?几种常见压缩方法
mp4视频太大怎么压缩?科技的飞速发展使得视频成为人们生活中不可或缺的一部分。然而,随着视频质量的不断提高,视频文件的大小也与日俱增,给我们的存储和传输带来了巨大的挑战和困扰。特别是MP4格式的视频,由于其出色的…...
论文复制ChatGPT按钮被发表,撤回后再曝多个类似案例;Midjourney 生成大师级的人像
🦉 AI新闻 🚀 论文复制ChatGPT按钮被发表,撤回后再曝多个类似案例 摘要:一篇物理论文复制了ChatGPT按钮内容,经过两个月同行评审并在杂志上发表。这一现象被知名打假人发现后,发表商决定撤回该论文。此外…...
Python自动化测试 史上最全的进阶教程
Python自动化测试就是把以前人为测试转化为机器测试的一种过程。自动化测试是一种比手工测试更快获得故障反馈的方法。 随着时代的变革,也许在未来测试这个职位的需求会越来越少甚至消失,但是每一个组织,每一个客户对软件质量的要求是永远不…...

centos pip失效
在 CentOS 上安装和配置 pip3 可能需要以下步骤: 确保 Python 3 已正确安装:请确保您已经正确地安装了 Python 3。在 CentOS 上,Python 3 可能默认安装在 /usr/bin/python3 路径下。您可以通过运行以下命令来验证 Python 3 是否正确安装&…...
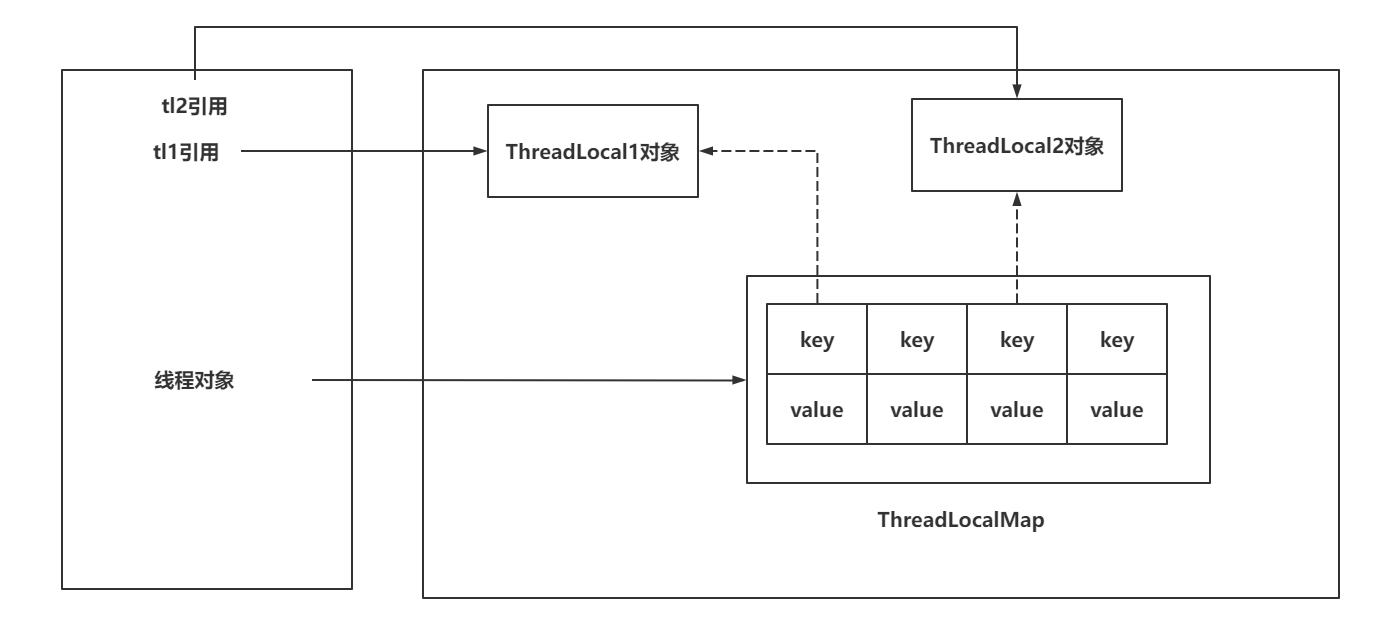
Java——》ThreadLocal
推荐链接: 总结——》【Java】 总结——》【Mysql】 总结——》【Redis】 总结——》【Kafka】 总结——》【Spring】 总结——》【SpringBoot】 总结——》【MyBatis、MyBatis-Plus】 总结——》【Linux】 总结——》【MongoD…...

如何做好利益相关方的期望管理?
利益相关方对项目而言非常重要,有效管理利益相关方的期望可以帮助项目团队更好地满足利益相关方的需求,助于建立良好的合作伙伴关系,提高项目的可持续性和成功率。 如果项目团队无法满足利益相关方的需求,可能会引发冲突、争议或其…...

【K8S系列】深入解析k8s网络插件—Canal
序言 做一件事并不难,难的是在于坚持。坚持一下也不难,难的是坚持到底。 文章标记颜色说明: 黄色:重要标题红色:用来标记结论绿色:用来标记论点蓝色:用来标记论点 在现代容器化应用程序的世界中…...
从单页面应用角度去解决不跳转页面,也能更改浏览器url地址
正常来说不刷新页面,也能更改浏览器url地址的方法有很多,我们在网上搜的话可以看到有pushState、replaceState、popstate等方法,那还有没有其他方法呢? 答案是有的! 最近做一个vue商城项目的时候,用户点击支…...

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接 服务端代码 #include <sys/socket.h> #include <sys/types.h> #include <netinet/in.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <arpa/inet.h> #include <pthread.h> …...
大数据学习栈记——Neo4j的安装与使用
本文介绍图数据库Neofj的安装与使用,操作系统:Ubuntu24.04,Neofj版本:2025.04.0。 Apt安装 Neofj可以进行官网安装:Neo4j Deployment Center - Graph Database & Analytics 我这里安装是添加软件源的方法 最新版…...
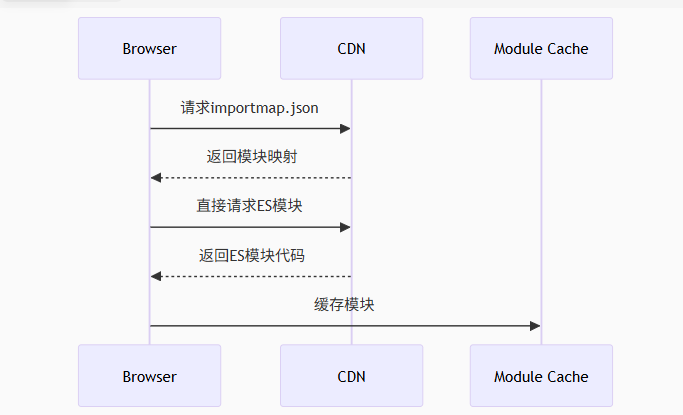
Module Federation 和 Native Federation 的比较
前言 Module Federation 是 Webpack 5 引入的微前端架构方案,允许不同独立构建的应用在运行时动态共享模块。 Native Federation 是 Angular 官方基于 Module Federation 理念实现的专为 Angular 优化的微前端方案。 概念解析 Module Federation (模块联邦) Modul…...
基础光照(Basic Lighting))
C++.OpenGL (10/64)基础光照(Basic Lighting)
基础光照(Basic Lighting) 冯氏光照模型(Phong Lighting Model) #mermaid-svg-GLdskXwWINxNGHso {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-GLdskXwWINxNGHso .error-icon{fill:#552222;}#mermaid-svg-GLd…...

MySQL用户和授权
开放MySQL白名单 可以通过iptables-save命令确认对应客户端ip是否可以访问MySQL服务: test: # iptables-save | grep 3306 -A mp_srv_whitelist -s 172.16.14.102/32 -p tcp -m tcp --dport 3306 -j ACCEPT -A mp_srv_whitelist -s 172.16.4.16/32 -p tcp -m tcp -…...
中关于正整数输入的校验规则)
Element Plus 表单(el-form)中关于正整数输入的校验规则
目录 1 单个正整数输入1.1 模板1.2 校验规则 2 两个正整数输入(联动)2.1 模板2.2 校验规则2.3 CSS 1 单个正整数输入 1.1 模板 <el-formref"formRef":model"formData":rules"formRules"label-width"150px"…...
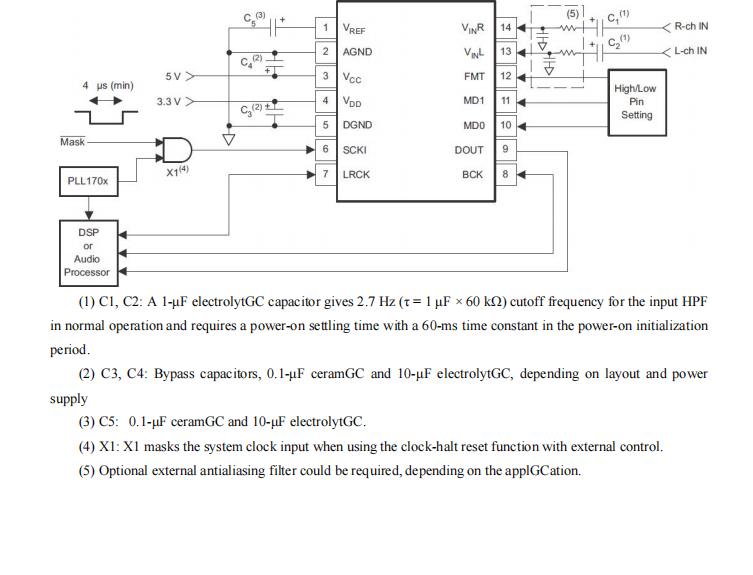
GC1808高性能24位立体声音频ADC芯片解析
1. 芯片概述 GC1808是一款24位立体声音频模数转换器(ADC),支持8kHz~96kHz采样率,集成Δ-Σ调制器、数字抗混叠滤波器和高通滤波器,适用于高保真音频采集场景。 2. 核心特性 高精度:24位分辨率,…...
论文笔记——相干体技术在裂缝预测中的应用研究
目录 相关地震知识补充地震数据的认识地震几何属性 相干体算法定义基本原理第一代相干体技术:基于互相关的相干体技术(Correlation)第二代相干体技术:基于相似的相干体技术(Semblance)基于多道相似的相干体…...

SQL Server 触发器调用存储过程实现发送 HTTP 请求
文章目录 需求分析解决第 1 步:前置条件,启用 OLE 自动化方式 1:使用 SQL 实现启用 OLE 自动化方式 2:Sql Server 2005启动OLE自动化方式 3:Sql Server 2008启动OLE自动化第 2 步:创建存储过程第 3 步:创建触发器扩展 - 如何调试?第 1 步:登录 SQL Server 2008第 2 步…...

Python实现简单音频数据压缩与解压算法
Python实现简单音频数据压缩与解压算法 引言 在音频数据处理中,压缩算法是降低存储成本和传输效率的关键技术。Python作为一门灵活且功能强大的编程语言,提供了丰富的库和工具来实现音频数据的压缩与解压。本文将通过一个简单的音频数据压缩与解压算法…...