opencv dnn模块 示例(16) 目标检测 object_detection 之 yolov4
博客【opencv dnn模块 示例(3) 目标检测 object_detection (2) YOLO object detection】 测试了yolov3 及之前系列的模型,有在博客【opencv dnn模块 示例(15) opencv4.2版本dnn支持cuda加速(vs2015异常解决)】 说明了如何使用dnn模块进行cuda加速推理。
本文说明yolo v4的网络改进和测试情况。
文章目录
- 1、前言
- 2、Yolo v4
- 2.1、网络结构
- 2.1.1、跨阶段部分网络(Cross Stage Partial Networks,CSPNet)
- 2.1.2、空间金字塔池化网络(Spatial Pyramid Pooling Network,SPPNet)
- 2.1.3、空间注意力机制(Spatial Attention Module,SAM)
- 2.1.4、路径聚合网络(Path Aggregation Network,PANet)
- 2.1.5、Mish激活函数
- 2.2、改进之处
- 2.2.1、马赛克(Mosaic)数据增强 + CutMix数据增强
- 2.2.2、自对抗训练(Self-Adversarial Training,SAT)
- 2.2.3、改进的Dropout(DropBlock)
- 2.2.4、标签平滑(Label Smoothing)
- 2.2.5、CIoU Loss损失函数
- 2.2.6、DIoU-NMS
- 3、测试
- 3.1、训练
- 3.2、测试代码
1、前言
yolo v1~v3 的作者Joseph Redmon于2020年初宣布停止一切CV研究,原因是自己的开源算法已经用在军事和隐私问题上,对他的道德造成了巨大的考验。他的退出是学术界对于AI道德问题一记警钟。salute…
俄罗斯大神AlexAB作为YOLO系列的继任者,在Redmon宣发放弃更新Yolo后两个月,发布了YOLOv4。我们以前在windows上测试YOLO算法时,使用的就是AlexAB 的 darknet开源项目 版本。
首先回顾下Yolo v3网络,整个主干网络Backbone为Darkent53,包含53个卷积层(全连接fc层用于图像分类,这里已移除);输出head包含三个尺度,输入为608*608时,分别为19*19,38*38,76*76。
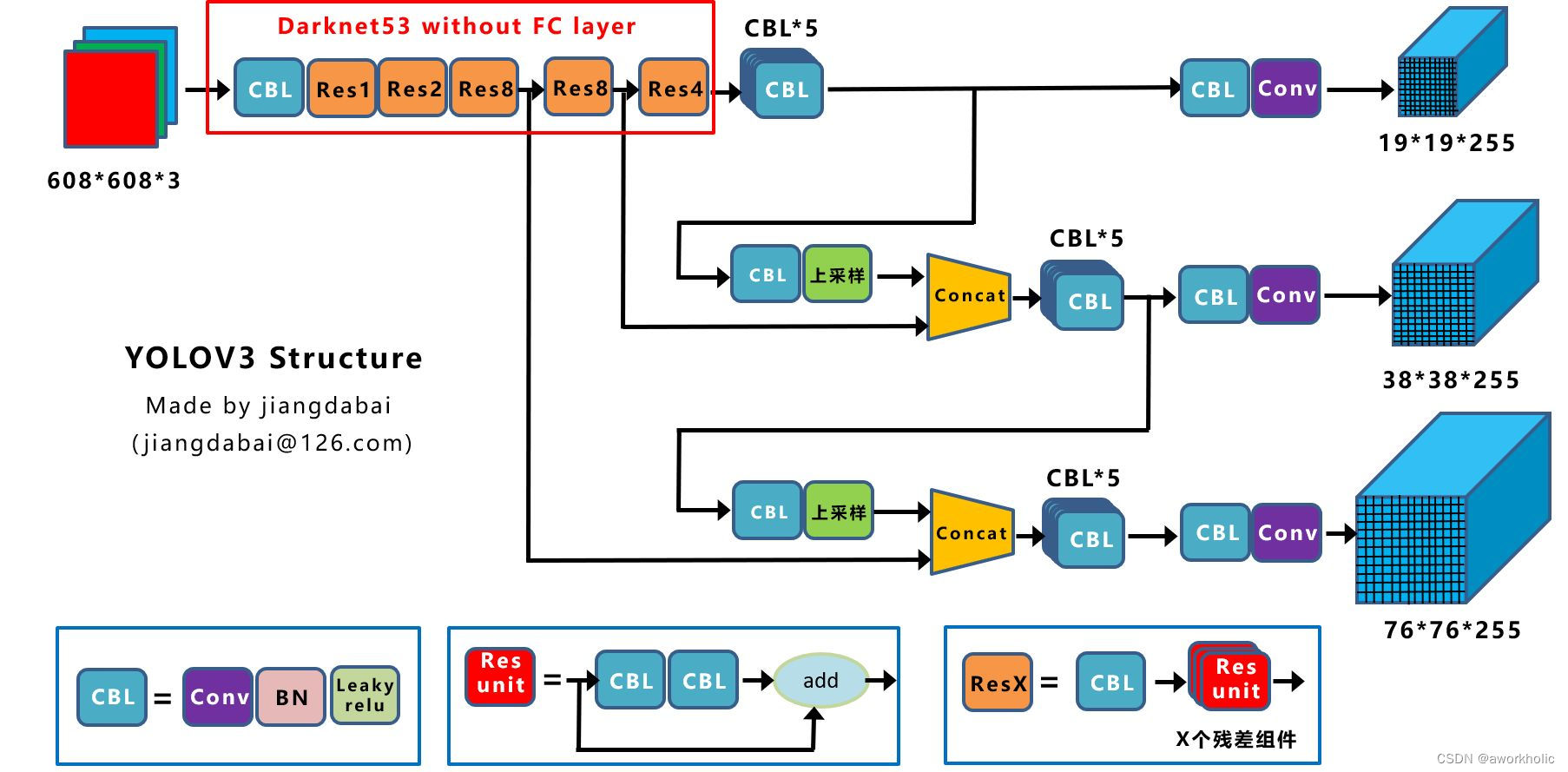
CBL 是Yolov3网络结构中的最小组件;
Res Unit 借鉴Resnet中残差结构,让网络构建更深;
ResX 是Yolov3的大组件,每个Res模块前CBL起到下采样过程,输入60*608的图像,经过5次Res模块后,得到的特征图是608->304->152->76->38->19。
Concat:张量拼接,会扩充两个张量的维度,例如26*26*256和26*26*512两个张量拼接,结果是26*26*768。Concat和cfg文件中的route功能一样。将大感受野的特征图进行上采样,得到于小感受野特征图相同的大小,进行维度拼接,达到多尺度特征融合的目的,从而加强小目标检测能力。
add:张量相加,张量直接相加,不会扩充维度,例如104*104*128和104*104*128相加,结果还是104*104*128。add和cfg文件中的shortcut功能一样。
2、Yolo v4
核心思想:
yolov4筛选了一些从yolov3发布至今,被用在各式各样检测器上,能够提高检测精度的tricks,并加以组合及适当创新的算法,实现了速度和精度的完美平衡。虽然有许多技巧可以提高卷积神经网络CNN的准确性,但是某些技巧仅适合在某些模型上运行,或者仅在某些问题上运行,或者仅在小型数据集上运行。
主要调优手段:
加权残差连接(WRC)、跨阶段部分连接(CSP)、跨小批量标准化(CmBN)、自对抗训练(SAT)、Mish激活、马赛克数据增强、CmBN、DropBlock正则化、CIoU Loss等等。经过一系列的堆料,终于实现了目前最优的实验结果:43.5%的AP(在Tesla V100上,MS COCO数据集的实时速度约为 65FPS)。
2.1、网络结构
相较于Darknet53网络,YoloV4的骨干网络使用CSPDarknet53,如下图
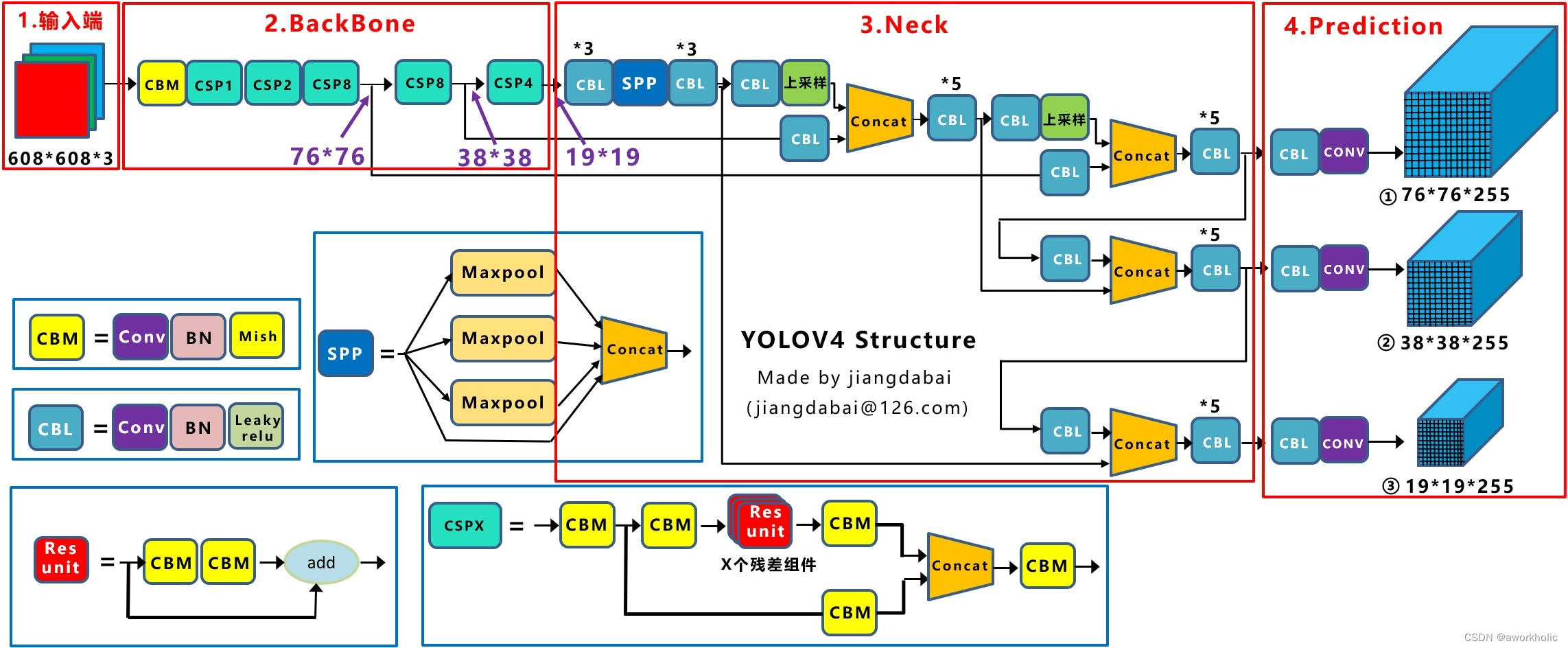
主要区别:
(1)将原来的Darknet53与CSPNet进行结合,形成Backbone网络。
(2)采用SPPNet适应不同尺寸的输入图像大小,且可以增大感受野;
(3)采用SAM引入空间注意力机制;
(4)采用PANet充分利用了特征融合;
(5)激活函数由MIsh替换Leaky ReLU; 在yolov3中,每个卷积层之后包含一个批归一化层和一个Leaky ReLU。而在yolov4的主干网络CSPDarknet53中,使用Mish替换原来的Leak ReLU。
2.1.1、跨阶段部分网络(Cross Stage Partial Networks,CSPNet)
2019年提出用来解决网络优化中的重复梯度信息问题,在ImageNet dataset和MS COCO数据集上有很好的测试效果。且易于实现,在ResNet、ResNeXt和DenseNet网络结构上都能通用。
CSPNet结构实现更丰富的梯度组合,同时减少计算量:将基本层的特征图分成两部分:(1)主干部分继续堆叠原来的残差块;(2)、支路部分则相当于一个残差边,经过少量处理直接连接到最后。
在这里插入图片描述
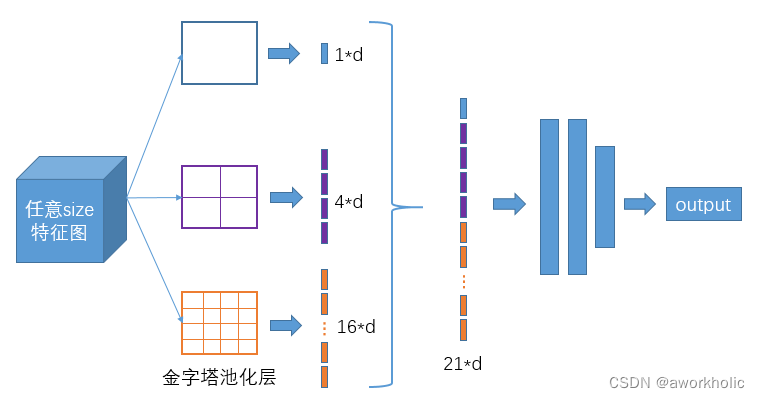
2.1.2、空间金字塔池化网络(Spatial Pyramid Pooling Network,SPPNet)
yolov1背景:yolov1训练时的分辨率:224×224;测试时:448×448。
yolov2背景:yolov2保持yolov1的操作不变,但在原训练的基础上又加上了(10个epoch)的448×448高分辨率样本进行微调,使网络特征逐渐适应 448×448 的分辨率;然后再使用 448×448 的样本进行测试,缓解了分辨率突然切换造成的影响。
目的:使得网络模型的输入图像不再有固定尺寸的大小限制。通过最大池化将不同尺寸的输入图像变得尺寸一致。
优点:增大感受野。
2.1.3、空间注意力机制(Spatial Attention Module,SAM)
yolov4采用改进的SAM方法:Channel attention module(CAM) -> SAM(Spatial Attention Module) -> CBAM(Convolutional Block AM) -> 改进的SAM
-
特征图注意力机制(Channel Attention Module):在Channel维度上,对每一个特征图(channel)加一个权重,然后通过sigmoid得到对应的概率值,最后乘上输入图像,相当于对输入图像的特征图进行加权,即注意力。
如:32×32×256,对256个通道进行加权。 -
空间注意力机制(Spatial Attention Module):在Spatial维度上,对每一个空间位置(Spatial)加一个权重,然后通过sigmoid得到对应的概率值,最后乘上输入图像,相当于对输入图像的所有位置特征进行加权,即注意力。
如:32×32×256,对任意空间位置进行
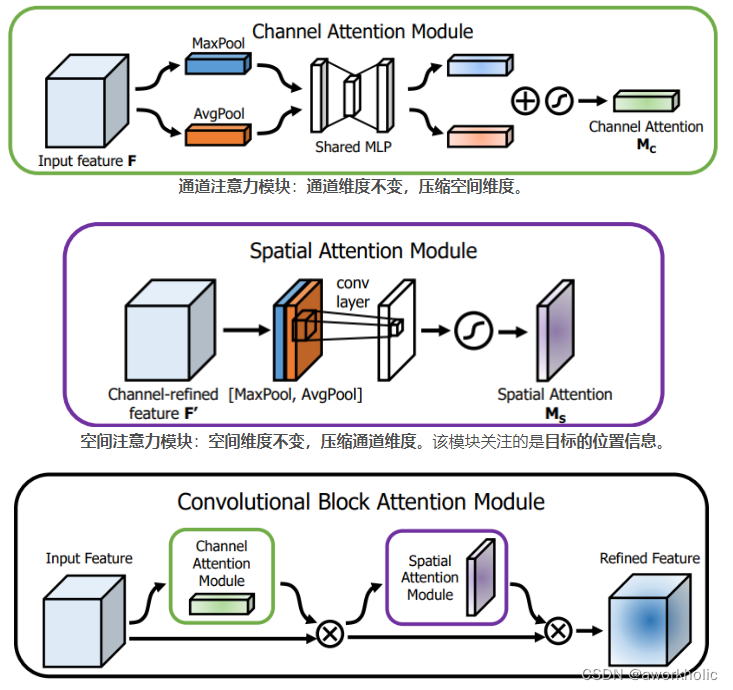
优化原因:
(1)由于CBAM计算比较复杂且耗时,而yolo的出发点是速度,故只计算空间位置的注意力机制。
(2)常规的SAM最大值池化层和平均池化层分别作用于输入的feature map,得到两组shape相同的feature map,再将结果输入到一个卷积层。 过程过于复杂,yolo采取直接卷积进行简化。
2.1.4、路径聚合网络(Path Aggregation Network,PANet)
背景: PANet发表于CVPR2018,其是COCO2017实例分割比赛的冠军,也是目标检测比赛的第二名。
具体方式: yolov4采用改进的PANet方法
优化历程: FPNet(Feature Pyramid Networks) -> PANet(Path Aggregation Network) -> 改进的PAN
优化原因:
(1)FPNet网络采取自上而下的方式,将高层特征逐层与中高层、中层、中底层、低层特征进行融合。缺点是无法自下而上融合,而PANet的优化了该部分不足,详见示意图的(b)部分。
(2)FANet采用特征相加的融合方式,而yolo采用特征拼接的融合方式。加法可以得到一个加强版的特征图,但特征权重不大于1,而拼接可能得到大于1的特征图。
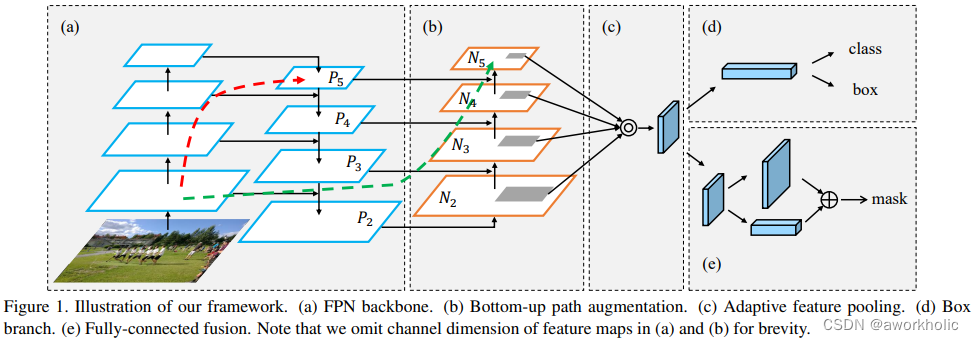
(a)FPNet:通过 融合高层特征 来提升目标检测的效果。
(b)Bottom-up Path Augmentation:通过 融合低层特征(边缘形状等)来提升目标检测的效果。
(c)Adaptive Feature Pooling:采用 拼接特征融合。拼接相比加法,特征更明显,可以提高检测效果。
(d)Box branch:类别和定位分支。
(e)Fully-connected Fusion:用于分割中像素级的预测。
2.1.5、Mish激活函数
Mish在负值的时候并不是完全截断,允许比较小的负梯度流入。实验中,随着层深的增加,ReLU激活函数精度迅速下降,而Mish激活函数在训练稳定性、平均准确率(1%-2.8%)、峰值准确率(1.2% - 3.6%)等方面都有全面的提高。
2.2、改进之处
BackBone训练策略:数据增强、自对抗训练、DropBlock正则化、类标签平滑、CIoU损失函数、DIoU-NMS等。
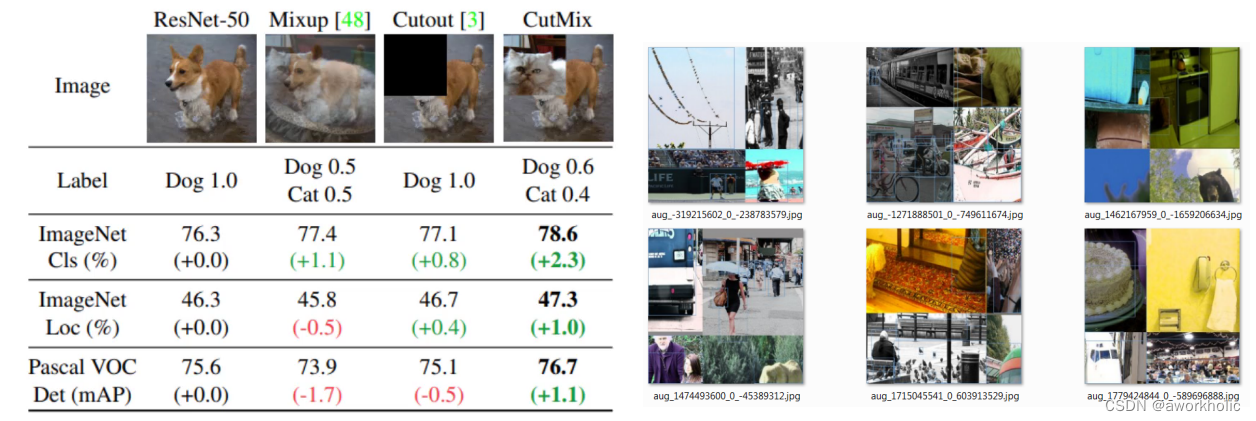
2.2.1、马赛克(Mosaic)数据增强 + CutMix数据增强
最大特点:使得yolov4只通过单CPU就能完成训练,不用再担心设备问题。
具体方式:
11、采用常用的数据增强方法(如:亮度、饱和度、对比度;随机缩放、旋转、翻转等)对所有的图像进行数据增强;
22、采用CutMix数据增强方法。详细见下。
33、采取马赛克(Mosaic)数据增强方法,即随机取四张图像拼接为一张图像。
2.2.2、自对抗训练(Self-Adversarial Training,SAT)
在第一阶段:在原始图像的基础上,添加噪音并设置权重阈值,让神经网络对自身进行对抗性攻击训练。
在第二阶段:用正常的方法训练神经网络去检测目标。
备注:详细可参考对抗攻击的快速梯度符号法(FGSM)。
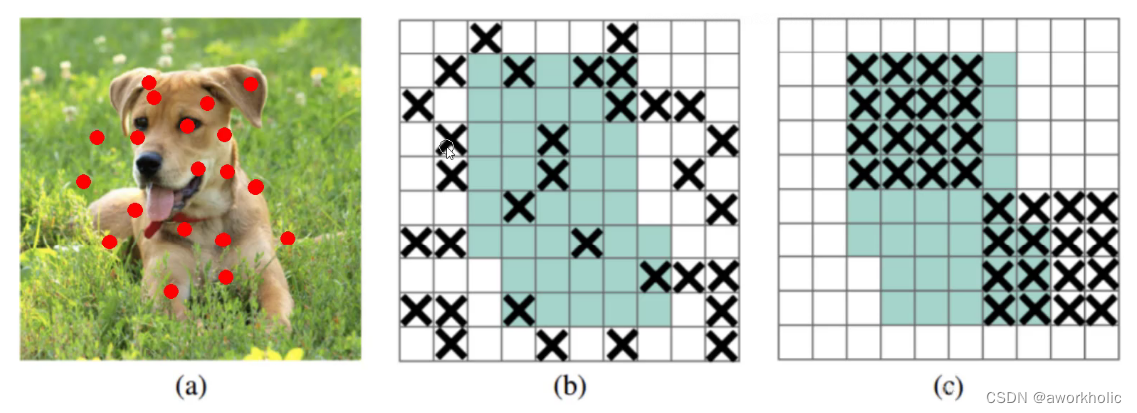
2.2.3、改进的Dropout(DropBlock)
之前的dropout是随机删除一些点,现在是整块删除。
b图:Dropout是随机删除一些神经元(如:a图的红点),但对于整张图来说,效果并不明显。比如:眼睛被删除,我们仍然可以通过眼睛的周边特征(眼角、眼圈等)去近似识别。
c图:DropBlock是随机删除一大块神经元。 如:将狗头的左耳全部删除。
2.2.4、标签平滑(Label Smoothing)
问题:标签绝对化:要么0要么1。该现象将导致神经网络在训练过程中,自我良好,从而过拟合。
具体方式:将绝对化标签进行平滑( 如:[0,0] ~ [0.05,0.95] ),即分类结果具有一定的模糊化,使得网络的抗过拟合能力增强。
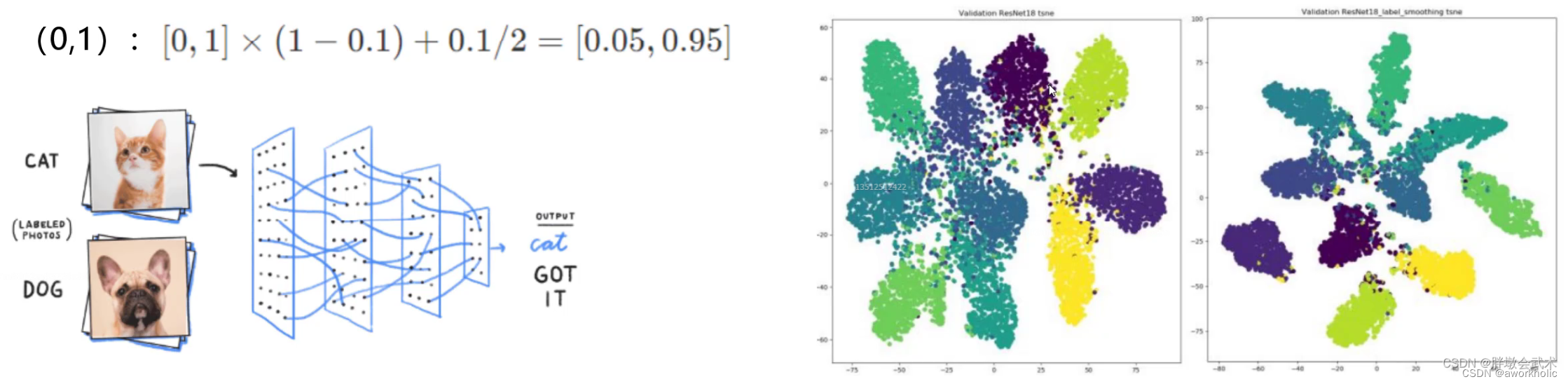
使用前,分类结果相对不错,但各类别之间存在一定的误差;使用后,分类结果比较好,簇内距离变小,簇间距离变大。
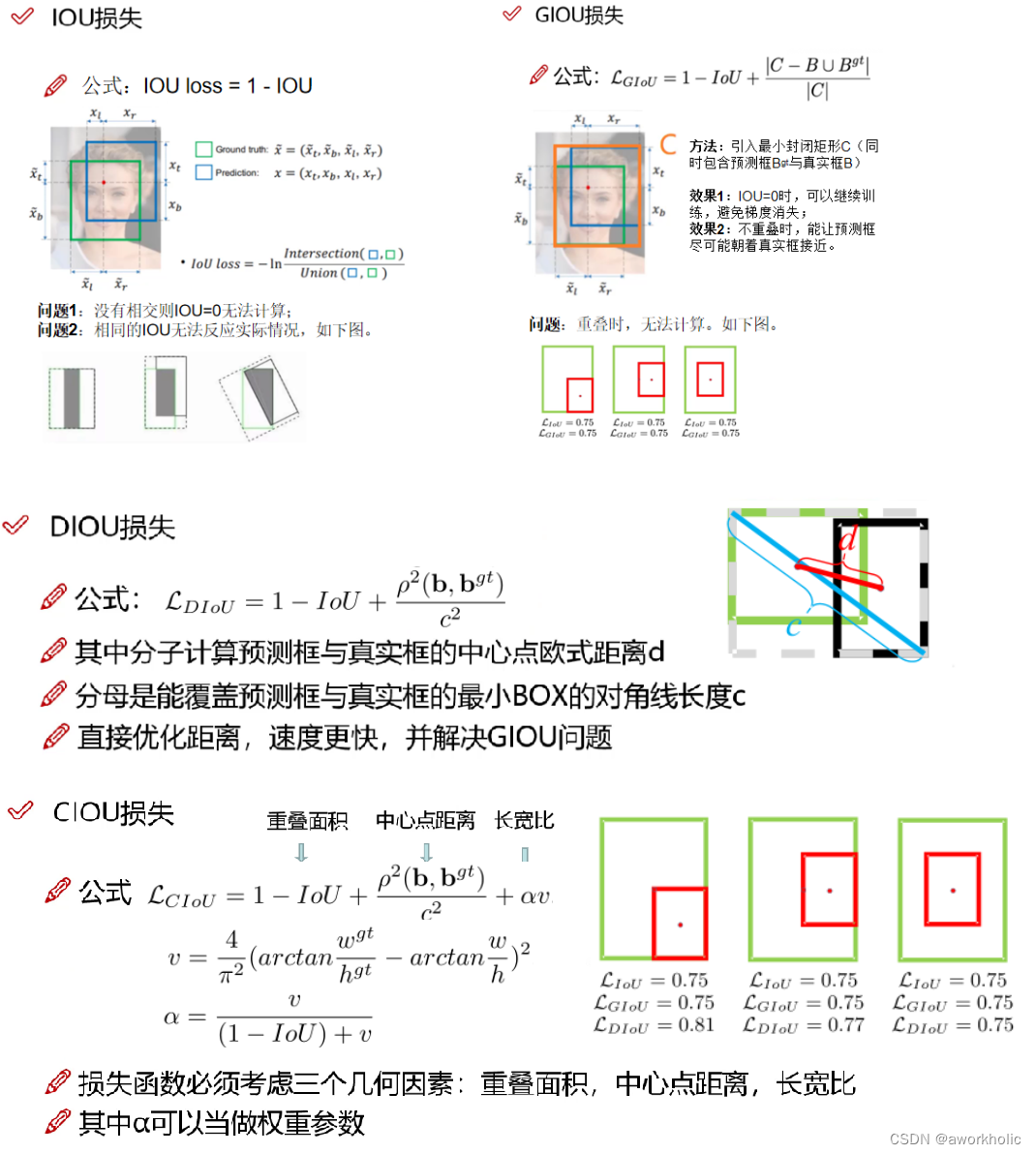
2.2.5、CIoU Loss损失函数
效果:采用CIoU Loss损失函数,使得预测框回归的速度和精度更高一些。
loss优化历程:经典IOU损失 -> GIOU损失(Generalized IoU) -> DIOU损失(Distance IoU) -> CIOU损失。
Iou仅考虑有目标框有交集的重叠面积情况,GIou考虑边界框不重合的问题、可以在没有交集情况下继续训练,DIou在前面的基础上考虑了边界框的中心点的欧氏距离,CIou进一步考虑长宽比的尺度信息。
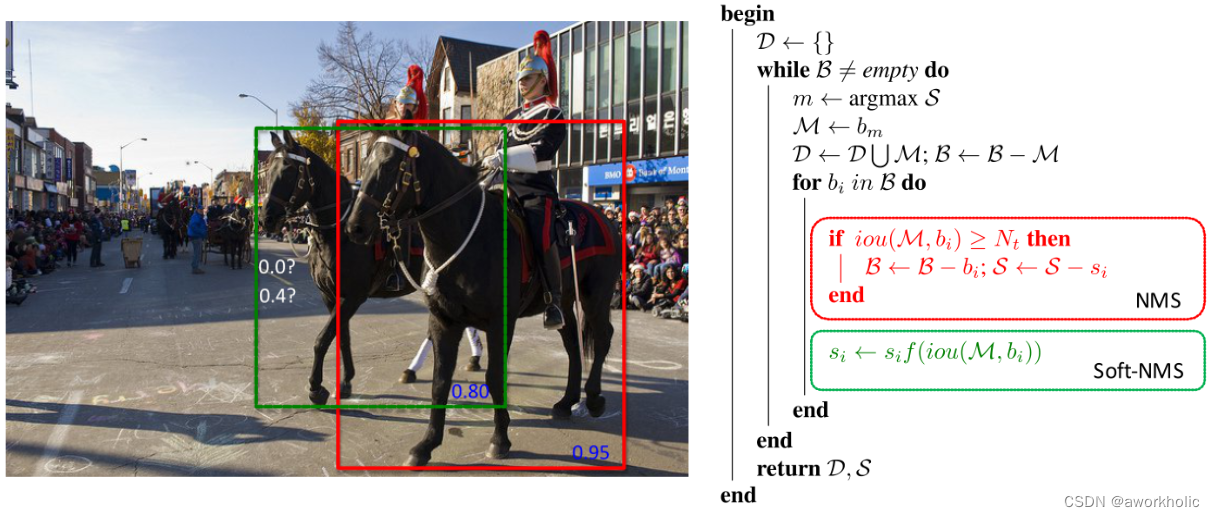
2.2.6、DIoU-NMS
在检测结果中,若存在多个检测框的IOU大于置信度阈值
(1)NMS非极大值抑制:只取IoU最大值对应的框。
(2)DIoU-NMS:只取公式计算得到的最大值对应的框。取最高置信度的IoU,并计算最高置信度候选框(M)与其余所有框(Bi)的中心点距离。优点:在有遮挡的情况下识别效果更好。

(3)SOFT-NMS:对于不满足要求,且与最大置信度对应的检测框高度重叠的检测框,不直接删除,而采取降低置信度的方式。优点:召回率更高
3、测试
yolov3 和 yolov4 使用相同代码即可测试。可以参看 【opencv dnn模块 示例(3) 目标检测 object_detection (2) YOLO object detection】。
项目介绍和下载地址 https://github.com/AlexeyAB/darknet#pre-trained-models
3.1、训练
yolo v4同样使用darknet框架,训练直接使用官方程序脚本(同yolov3)即可。
3.2、测试代码
#include <fstream>
#include <sstream>#include <opencv2/dnn.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>using namespace cv;
using namespace dnn;float confThreshold, nmsThreshold;
std::vector<std::string> classes;void postprocess(Mat& frame, const std::vector<Mat>& out, Net& net);void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame);void callback(int pos, void* userdata);int main(int argc, char** argv)
{// 根据选择的检测模型文件进行配置 confThreshold = 0.5;nmsThreshold = 0.4;float scale = 0.00392;Scalar mean = {0,0,0};bool swapRB = true;int inpWidth = 416; // 416, 608 ...int inpHeight = 416;String modelPath = "../../data/testdata/dnn/yolov4.weights";String configPath = "../../data/testdata/dnn/yolov4.cfg";String framework = "";//int backendId = cv::dnn::DNN_BACKEND_OPENCV;//int targetId = cv::dnn::DNN_TARGET_CPU; int backendId = cv::dnn::DNN_BACKEND_CUDA;int targetId = cv::dnn::DNN_TARGET_CUDA;String classesFile = "../../data/dnn/object_detection_classes_yolov4.txt";// Open file with classes names.if (!classesFile.empty()) {const std::string& file = classesFile;std::ifstream ifs(file.c_str());if (!ifs.is_open())CV_Error(Error::StsError, "File " + file + " not found");std::string line;while (std::getline(ifs, line)) {classes.push_back(line);}}// Load a model.Net net = readNet(modelPath, configPath, framework);net.setPreferableBackend(backendId);net.setPreferableTarget(targetId);std::vector<String> outNames = net.getUnconnectedOutLayersNames();// Create a windowstatic const std::string kWinName = "Deep learning object detection in OpenCV";// Open a video file or an image file or a camera stream.VideoCapture cap;cap.open(0);// Process frames.Mat frame, blob;while (waitKey(1) < 0) {cap >> frame;if (frame.empty()) {waitKey();break;}// Create a 4D blob from a frame.Size inpSize(inpWidth > 0 ? inpWidth : frame.cols,inpHeight > 0 ? inpHeight : frame.rows);blobFromImage(frame, blob, scale, inpSize, mean, swapRB, false);// Run a model.net.setInput(blob);if (net.getLayer(0)->outputNameToIndex("im_info") != -1) // Faster-RCNN or R-FCN{resize(frame, frame, inpSize);Mat imInfo = (Mat_<float>(1, 3) << inpSize.height, inpSize.width, 1.6f);net.setInput(imInfo, "im_info");}std::vector<Mat> outs;net.forward(outs, outNames);postprocess(frame, outs, net);// Put efficiency information.std::vector<double> layersTimes;double freq = getTickFrequency() / 1000;double t = net.getPerfProfile(layersTimes) / freq;std::string label = format("Inference time: %.2f ms", t);putText(frame, label, Point(0, 15), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0));imshow(kWinName, frame);}return 0;
}void postprocess(Mat& frame, const std::vector<Mat>& outs, Net& net)
{static std::vector<int> outLayers = net.getUnconnectedOutLayers();static std::string outLayerType = net.getLayer(outLayers[0])->type;std::vector<int> classIds;std::vector<float> confidences;std::vector<Rect> boxes;if (net.getLayer(0)->outputNameToIndex("im_info") != -1) // Faster-RCNN or R-FCN{// Network produces output blob with a shape 1x1xNx7 where N is a number of// detections and an every detection is a vector of values// [batchId, classId, confidence, left, top, right, bottom]CV_Assert(outs.size() == 1);float* data = (float*)outs[0].data;for (size_t i = 0; i < outs[0].total(); i += 7) {float confidence = data[i + 2];if (confidence > confThreshold) {int left = (int)data[i + 3];int top = (int)data[i + 4];int right = (int)data[i + 5];int bottom = (int)data[i + 6];int width = right - left + 1;int height = bottom - top + 1;classIds.push_back((int)(data[i + 1]) - 1); // Skip 0th background class id.boxes.push_back(Rect(left, top, width, height));confidences.push_back(confidence);}}}else if (outLayerType == "DetectionOutput") {// Network produces output blob with a shape 1x1xNx7 where N is a number of// detections and an every detection is a vector of values// [batchId, classId, confidence, left, top, right, bottom]CV_Assert(outs.size() == 1);float* data = (float*)outs[0].data;for (size_t i = 0; i < outs[0].total(); i += 7) {float confidence = data[i + 2];if (confidence > confThreshold) {int left = (int)(data[i + 3] * frame.cols);int top = (int)(data[i + 4] * frame.rows);int right = (int)(data[i + 5] * frame.cols);int bottom = (int)(data[i + 6] * frame.rows);int width = right - left + 1;int height = bottom - top + 1;classIds.push_back((int)(data[i + 1]) - 1); // Skip 0th background class id.boxes.push_back(Rect(left, top, width, height));confidences.push_back(confidence);}}}else if (outLayerType == "Region") {for (size_t i = 0; i < outs.size(); ++i) {// Network produces output blob with a shape NxC where N is a number of// detected objects and C is a number of classes + 4 where the first 4// numbers are [center_x, center_y, width, height]float* data = (float*)outs[i].data;for (int j = 0; j < outs[i].rows; ++j, data += outs[i].cols) {Mat scores = outs[i].row(j).colRange(5, outs[i].cols);Point classIdPoint;double confidence;minMaxLoc(scores, 0, &confidence, 0, &classIdPoint);if (confidence > confThreshold) {int centerX = (int)(data[0] * frame.cols);int centerY = (int)(data[1] * frame.rows);int width = (int)(data[2] * frame.cols);int height = (int)(data[3] * frame.rows);int left = centerX - width / 2;int top = centerY - height / 2;classIds.push_back(classIdPoint.x);confidences.push_back((float)confidence);boxes.push_back(Rect(left, top, width, height));}}}}elseCV_Error(Error::StsNotImplemented, "Unknown output layer type: " + outLayerType);std::vector<int> indices;NMSBoxes(boxes, confidences, confThreshold, nmsThreshold, indices);for (size_t i = 0; i < indices.size(); ++i) {int idx = indices[i];Rect box = boxes[idx];drawPred(classIds[idx], confidences[idx], box.x, box.y,box.x + box.width, box.y + box.height, frame);}
}void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame)
{rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 255, 0));std::string label = format("%.2f", conf);if (!classes.empty()) {CV_Assert(classId < (int)classes.size());label = classes[classId] + ": " + label;}int baseLine;Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);top = max(top, labelSize.height);rectangle(frame, Point(left, top - labelSize.height),Point(left + labelSize.width, top + baseLine), Scalar::all(255), FILLED);putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.5, Scalar());
}相关文章:
opencv dnn模块 示例(16) 目标检测 object_detection 之 yolov4
博客【opencv dnn模块 示例(3) 目标检测 object_detection (2) YOLO object detection】 测试了yolov3 及之前系列的模型,有在博客【opencv dnn模块 示例(15) opencv4.2版本dnn支持cuda加速(vs2015异常解决)】 说明了如何使用dnn模块进行cuda…...
Python提取JSON数据中的键值对并保存为.csv文件
本文介绍基于Python,读取JSON文件数据,并将JSON文件中指定的键值对数据转换为.csv格式文件的方法。 在之前的文章Python提取JSON文件中的指定数据并保存在CSV或Excel表格文件内(https://blog.csdn.net/zhebushibiaoshifu/article/details/132…...

使用IDEA开发Servlet
一、新建工程 二、填写新工程的基本信息 javaee8的项目可以运行在tomcat9 三、配置tomcat 1、编辑server信息 “On frame deactivation”的意思是idea窗口发生切换时。 2、编辑部署信息 war exploded方式,这种方式是以文件夹方式部署的,支持热加载。 …...
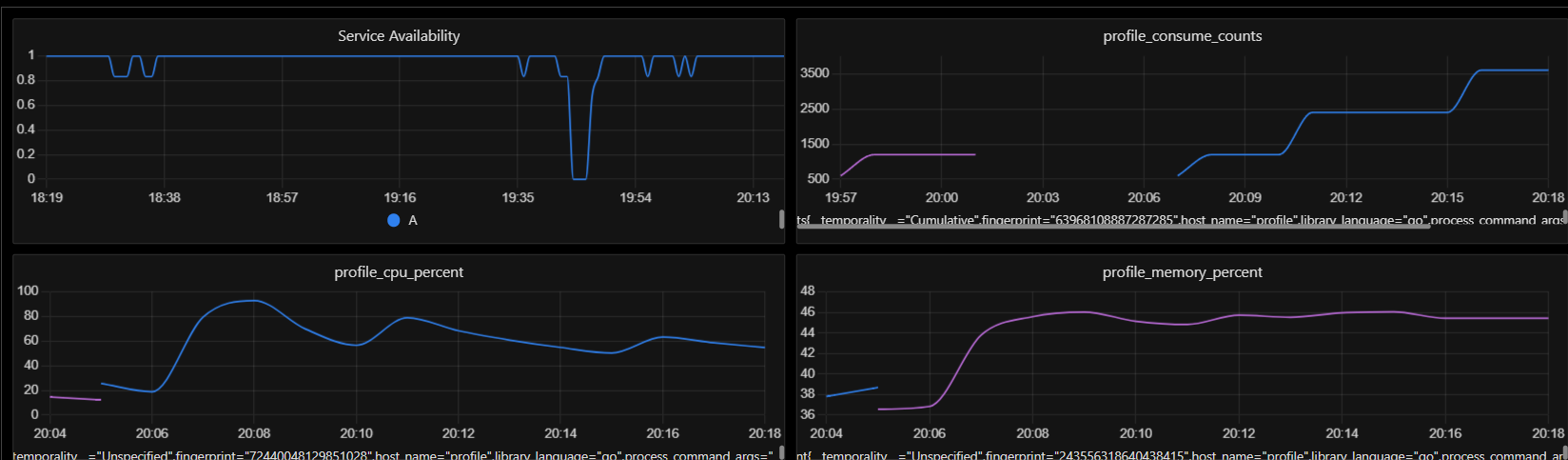
腾讯mini项目-【指标监控服务重构】2023-07-21
今日已办 当在Docker容器中运行程序时,可能会遇到使用os.Getpid()函数时出现异常的情况。这是因为Docker容器中的进程隔离机制与宿主机器不同,容器内部的进程可能无法访问宿主机器的进程信息。 要解决这个问题,可以尝试: 使用do…...
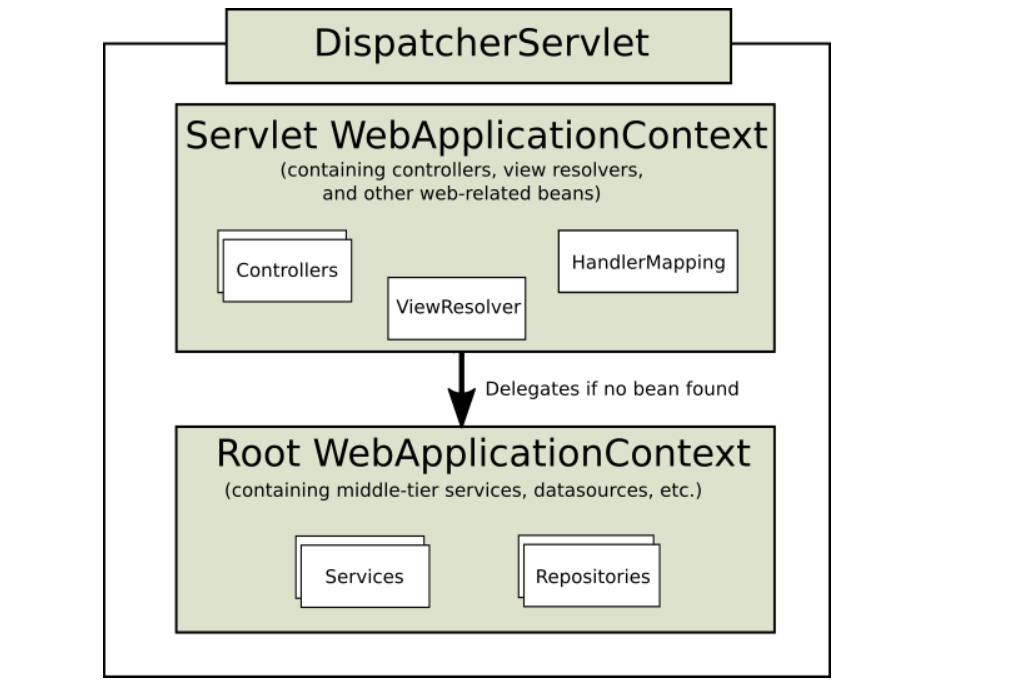
Spring MVC里的DispatchServlet(结合Spring官网翻译)
Spring MVC里的DispatchServlet 前言1.Spring Web MVC1.1 DispatcherServlet(中央调度器)1.1.1 Context Hierarchy(上下文层次结构)1.1.2 Special Bean Types(特定的bean类型)1.1.3 Web MVC Config1.1.4 Se…...

数据分享|R语言武汉流动人口趋势预测:灰色模型GM(1,1)、ARIMA时间序列、logistic逻辑回归模型...
全文链接:http://tecdat.cn/?p32496 人口流动与迁移,作为人类产生以来就存在的一种社会现象,伴随着人类文明的不断进步从未间断(点击文末“阅读原文”获取完整代码数据)。 相关视频 人力资源是社会文明进步、人民富裕…...
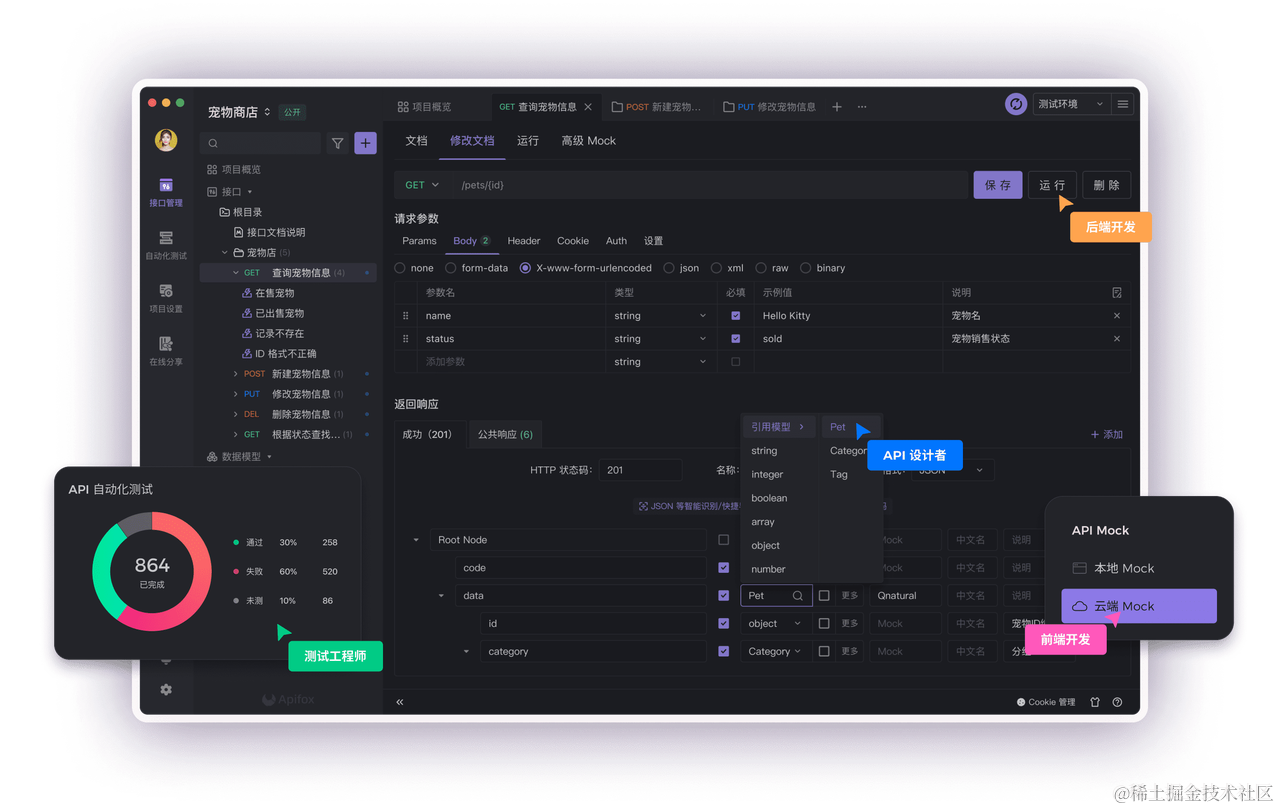
解决 Axios 跨域问题,轻松实现接口调用
跨域是指访问另外一个域的资源,由于浏览器的同源策略,默认情况下使用 XMLHttpRequest 和 Fetch 请求时是不允许跨域的。跨域的根本原因是浏览器的同源策略,这是由浏览器对 JavaScript 施加的安全限制。 Axios 跨域常见报错 跨域请求被阻止 (…...

Layui快速入门之第十节 表单
目录 一:基本用法 二:输入框 普通输入框 输入框点缀 前置和后置 前缀和后缀 动态点缀 密码显隐 内容清除 自定义动态点缀 点缀事件 三:复选框 默认风格 标签风格 开关风格 复选框事件 四:单选框 普通单选框 自…...
Linux之yum/git的使用
目录 一、yum 1、关于yum 2、yum的操作 ①、yum list ②、yum install ③、yum remove 二、git 1、Linux中连接gitee 2、git的操作 ①git add [文件] ②git commit -m "提交日志" ③git push 3、可能出现的问题 ①配置用户名、邮箱 ②出现提交冲突 ③…...

使用ExcelJS快速处理Node.js爬虫数据
什么是ExcelJS ExcelJS是一个用于处理Excel文件的JavaScript库。它可以让你使用JavaScript创建、读取和修改Excel文件。 以下是ExcelJS的一些主要特点: 支持xlsx、xlsm、xlsb、xls格式的Excel文件。可以创建和修改工作表、单元格、行和列。可以设置单元格样式、字…...
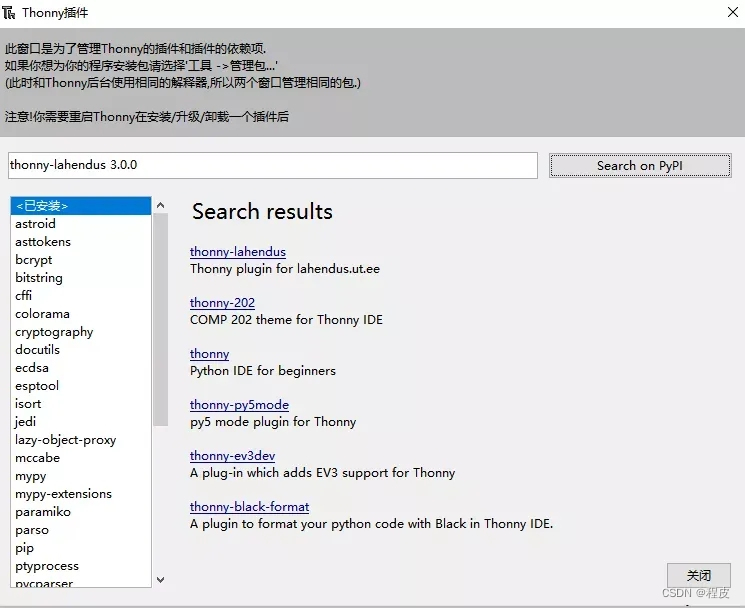
轻量级的Python IDE —— Thonny
现在的开发工具太多了,而且每个开发工具都致力于做成最好用最智能的工具,所以功能越堆越多,越怼越智能。安装这些开发工具比较烧脑,经常需要经过许多配置步骤。作为一个 Python 开发者来说,好多人光是这些配置都要弄半…...
java设计模式之观察者模式
. 基本概念 观察者(Observer)模式中包含两种对象,分别是目标对象和观察者对象。在目标对象和观察者对象间存在着一种一对多的对应关系,当这个目标对象的状态发生变化时,所有依赖于它的观察者对象都会得到通知并执行它…...

掌动智能分享:性能压力测试的重要性与优势
在当今数字化时代,应用程序的性能对于用户体验和业务成功至关重要。为了保证应用程序的高性能和稳定性,性能压力测试成为了不可或缺的环节。在这个领域,掌动智能作为一家专业的性能压力测试公司,正以其卓越的技术与服务࿰…...

C# ppt文件转换为pdf文件
使用第三方插件 Office 实现转换 1.Application方式转换 /// <summary>/// Microsoft.Office.Interop.PowerPoint/// 使用第三方软件 office/// </summary>/// <param name"pptPath">需要转换的ppt文件路径</param>/// <param name"…...
使用Pyarmor保护Python脚本不被反向工程
Python可读性强,使用广泛。虽然这种可读性有利于协作,但也增加了未授权访问和滥用的风险。如果未采取适当的保护,竞争对手或恶意攻击者可以复制您的算法和专有逻辑,这将对您软件的完整性和用户的信任产生负面影响。 实施可靠的安…...
STM32单片机——串口通信(轮询+中断)
STM32单片机——串口通信(轮询中断) 串口通信相关概念HAL库解析及CubeMX工程配置与程序设计常用函数介绍CubeMX工程配置HAL库程序设计(轮询中断)轮询数据收发中断收发数据 固件库程序设计及实现固件库配置流程结构体配置及初始化程…...

Python if语句的嵌套应用
视频版教程 Python3零基础7天入门实战视频教程 有时候业务上有多维度复杂条件判断,我们需要用到if语句的嵌套来实现。 举例:我们在一些游戏网站活动充值的时候,冲100送 20 冲200送50 但是vip用户的话,冲100送 30 冲200送70 代码…...

C++中带默认值的函数参数
C中带默认值的函数参数 如果一直将 Pi 声明为常量,没有给用户提供修改它的机会。然而,用户可能希望其精度更高或更低。如何编写一个函数,在用户没有提供的情况下,将 Pi 设置为默认值呢? 为解决这种问题,一…...

记录一次部署Hugo主题lotusdocs到Github Pages实践
引言 随着开源项目的越来越复杂,项目文档的重要性日渐突出。一个好的项目要有一个清晰明了的文档来帮助大家使用。最近一直有在找寻一个简洁明了的文档主题来放置项目的各种相关文档。最终找到这次的主角:Lotus Docs 基于Hugo的主题。Lotus Docs的样子&…...
stm32---基本定时器(TIM6,TIM7)
STM32F1的定时器非常多,由两个基本定时器(TIM6,TIM7)、4个通用定时器(TIM2-TIM5)和两个高级定时器(TIM1,TIM8)组成。基本定时器的功能最为简单&am…...

SkyWalking 10.2.0 SWCK 配置过程
SkyWalking 10.2.0 & SWCK 配置过程 skywalking oap-server & ui 使用Docker安装在K8S集群以外,K8S集群中的微服务使用initContainer按命名空间将skywalking-java-agent注入到业务容器中。 SWCK有整套的解决方案,全安装在K8S群集中。 具体可参…...
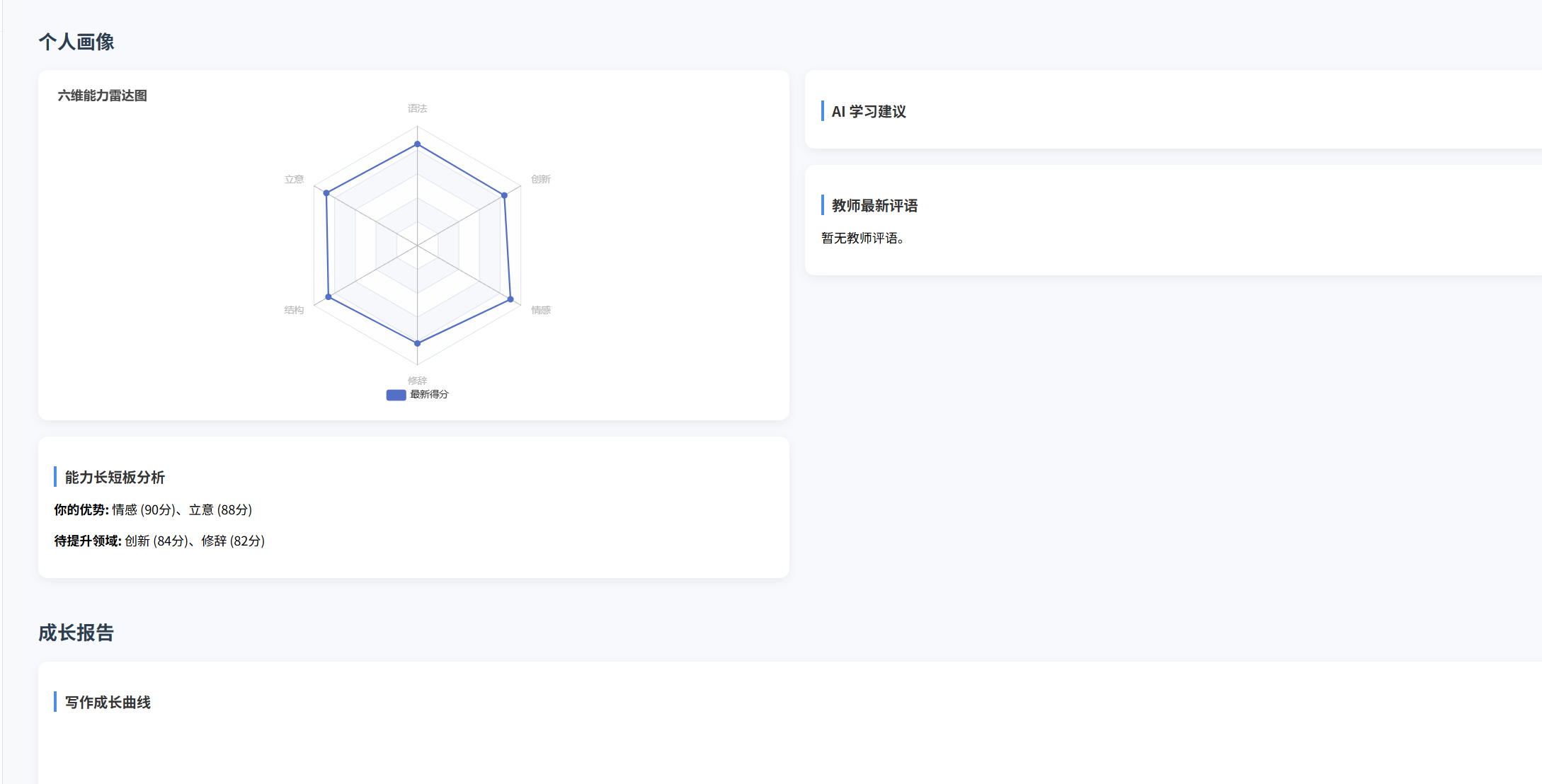
(十)学生端搭建
本次旨在将之前的已完成的部分功能进行拼装到学生端,同时完善学生端的构建。本次工作主要包括: 1.学生端整体界面布局 2.模拟考场与部分个人画像流程的串联 3.整体学生端逻辑 一、学生端 在主界面可以选择自己的用户角色 选择学生则进入学生登录界面…...
Cesium相机控制)
三维GIS开发cesium智慧地铁教程(5)Cesium相机控制
一、环境搭建 <script src"../cesium1.99/Build/Cesium/Cesium.js"></script> <link rel"stylesheet" href"../cesium1.99/Build/Cesium/Widgets/widgets.css"> 关键配置点: 路径验证:确保相对路径.…...
以下是对华为 HarmonyOS NETX 5属性动画(ArkTS)文档的结构化整理,通过层级标题、表格和代码块提升可读性:
一、属性动画概述NETX 作用:实现组件通用属性的渐变过渡效果,提升用户体验。支持属性:width、height、backgroundColor、opacity、scale、rotate、translate等。注意事项: 布局类属性(如宽高)变化时&#…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...

USB Over IP专用硬件的5个特点
USB over IP技术通过将USB协议数据封装在标准TCP/IP网络数据包中,从根本上改变了USB连接。这允许客户端通过局域网或广域网远程访问和控制物理连接到服务器的USB设备(如专用硬件设备),从而消除了直接物理连接的需要。USB over IP的…...
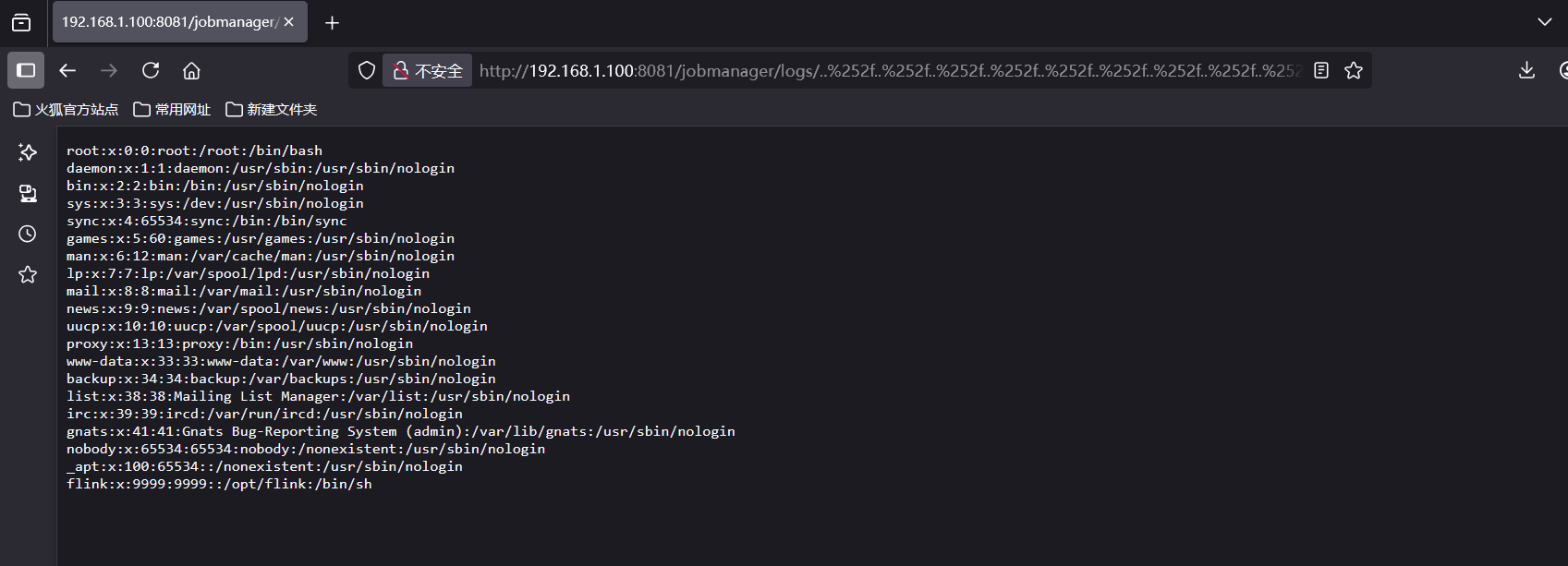
CVE-2020-17519源码分析与漏洞复现(Flink 任意文件读取)
漏洞概览 漏洞名称:Apache Flink REST API 任意文件读取漏洞CVE编号:CVE-2020-17519CVSS评分:7.5影响版本:Apache Flink 1.11.0、1.11.1、1.11.2修复版本:≥ 1.11.3 或 ≥ 1.12.0漏洞类型:路径遍历&#x…...
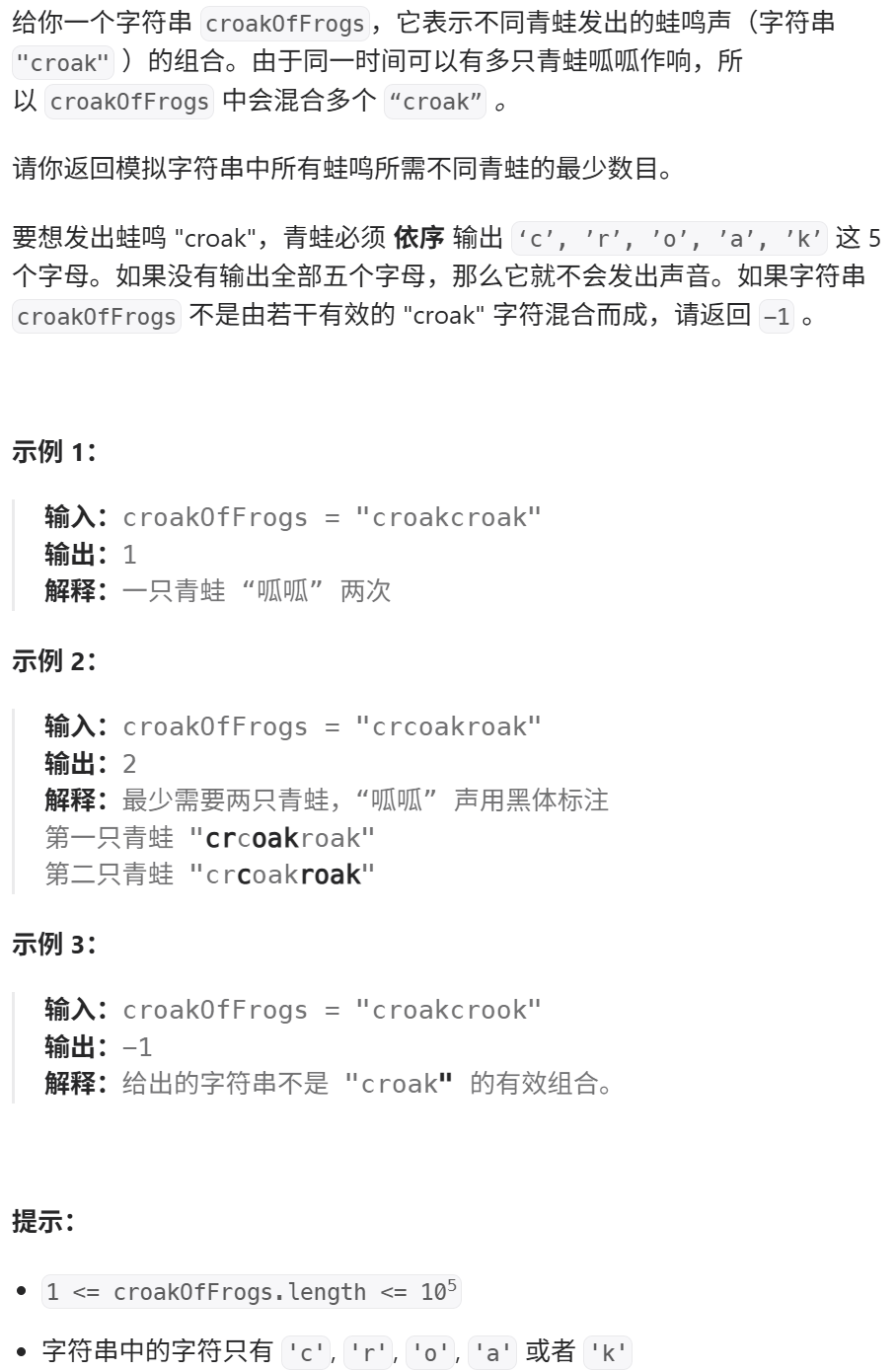
算法:模拟
1.替换所有的问号 1576. 替换所有的问号 - 力扣(LeetCode) 遍历字符串:通过外层循环逐一检查每个字符。遇到 ? 时处理: 内层循环遍历小写字母(a 到 z)。对每个字母检查是否满足: 与…...

BLEU评分:机器翻译质量评估的黄金标准
BLEU评分:机器翻译质量评估的黄金标准 1. 引言 在自然语言处理(NLP)领域,衡量一个机器翻译模型的性能至关重要。BLEU (Bilingual Evaluation Understudy) 作为一种自动化评估指标,自2002年由IBM的Kishore Papineni等人提出以来,…...

redis和redission的区别
Redis 和 Redisson 是两个密切相关但又本质不同的技术,它们扮演着完全不同的角色: Redis: 内存数据库/数据结构存储 本质: 它是一个开源的、高性能的、基于内存的 键值存储数据库。它也可以将数据持久化到磁盘。 核心功能: 提供丰…...