数据结构——KD树
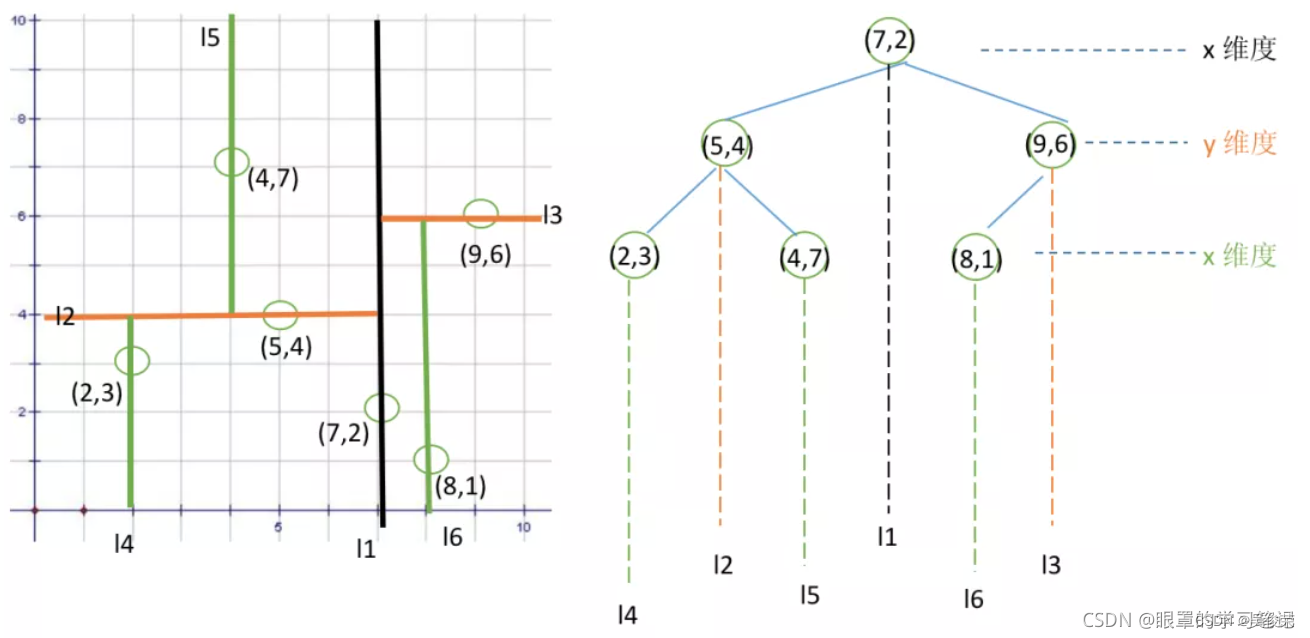
KD树(K-Dimensional Tree)是一种用于多维空间的二叉树数据结构,旨在提供高效的数据检索。KD树在空间搜索和最近邻搜索等问题中特别有用,允许在高维空间中有效地搜索数据点。
重要性质
1.分割K维数据空间的数据结构
2.是一颗二叉树
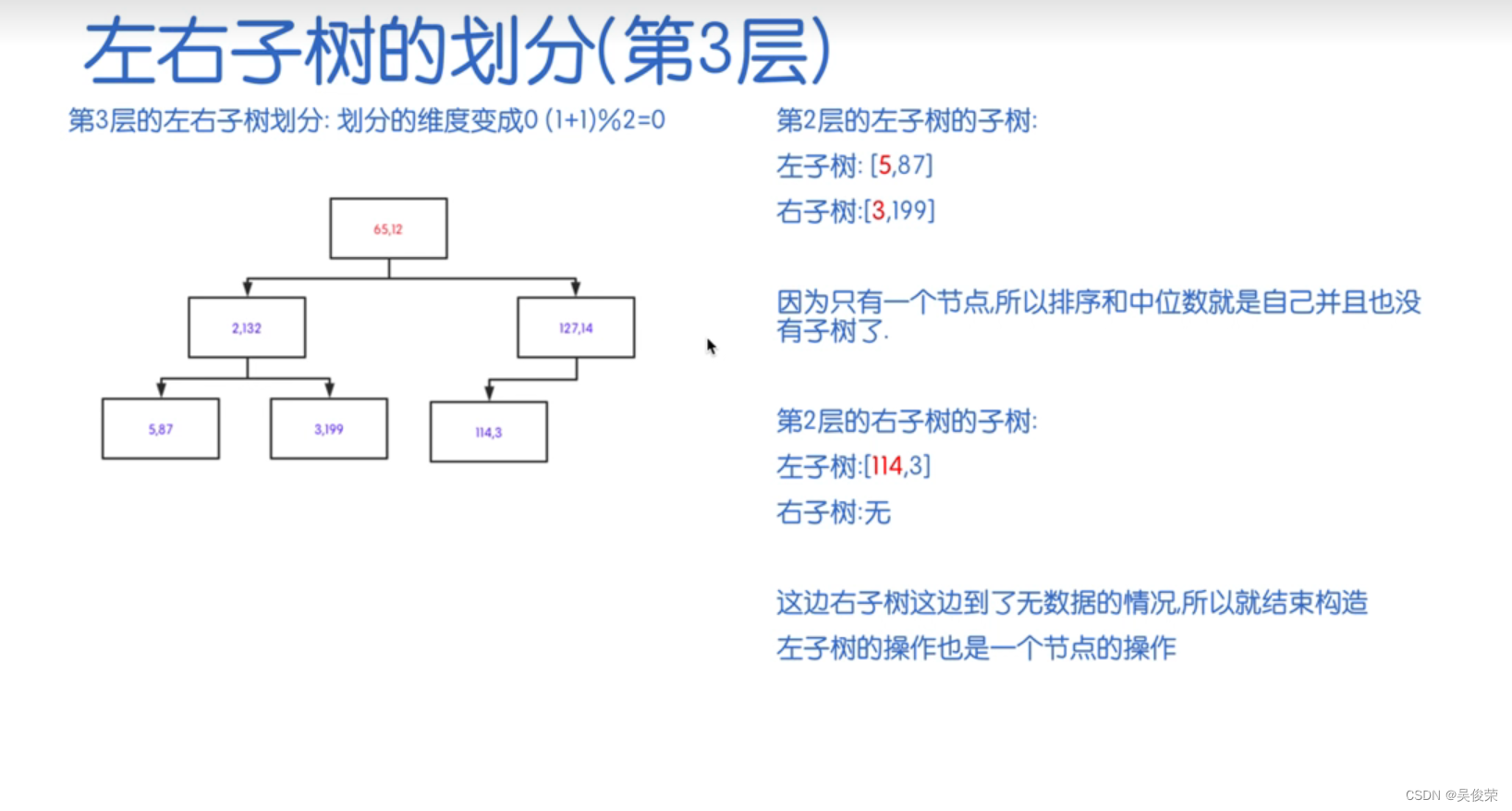
3.切分维度上,左子树值小于右子树值
#include <iostream>
#include <vector>
#include <algorithm>
#include <cmath>// 定义二维点的结构体
struct Point2D {double x;double y;Point2D(double _x, double _y) : x(_x), y(_y) {}
};// 定义KD树节点
struct KDTreeNode {Point2D point;KDTreeNode* left;KDTreeNode* right;KDTreeNode(Point2D _point) : point(_point), left(nullptr), right(nullptr) {}
};class KDTree {
private:KDTreeNode* root;// 构建KD树的递归函数KDTreeNode* buildKDTree(std::vector<Point2D>& points, int depth) {if (points.empty()) {return nullptr;}// 选择轴线,交替选择x和y坐标int axis = depth % 2;// 按轴线排序点if (axis == 0) {std::sort(points.begin(), points.end(), [](const Point2D& a, const Point2D& b) {return a.x < b.x;});} else {std::sort(points.begin(), points.end(), [](const Point2D& a, const Point2D& b) {return a.y < b.y;});}// 选择中间点作为节点int median = points.size() / 2;KDTreeNode* node = new KDTreeNode(points[median]);// 递归构建左子树和右子树std::vector<Point2D> leftPoints(points.begin(), points.begin() + median);std::vector<Point2D> rightPoints(points.begin() + median + 1, points.end());node->left = buildKDTree(leftPoints, depth + 1);node->right = buildKDTree(rightPoints, depth + 1);return node;}// 在KD树中查找最近邻点的递归函数KDTreeNode* findNearestNeighbor(KDTreeNode* node, Point2D target, int depth, KDTreeNode* best, double& bestDistance) {if (node == nullptr) {return best;}// 计算当前节点到目标点的距离double currentDistance = distance(node->point, target);// 更新最近邻点和距离if (currentDistance < bestDistance) {best = node;bestDistance = currentDistance;}// 选择子树int axis = depth % 2;KDTreeNode* nearSubtree;KDTreeNode* farSubtree;if (axis == 0) {if (target.x < node->point.x) {nearSubtree = node->left;farSubtree = node->right;} else {nearSubtree = node->right;farSubtree = node->left;}} else {if (target.y < node->point.y) {nearSubtree = node->left;farSubtree = node->right;} else {nearSubtree = node->right;farSubtree = node->left;}}// 递归搜索更近的子树best = findNearestNeighbor(nearSubtree, target, depth + 1, best, bestDistance);// 如果可能,搜索更远的子树if (shouldSearchFarSubtree(node, target, bestDistance)) {best = findNearestNeighbor(farSubtree, target, depth + 1, best, bestDistance);}return best;}// 计算两点之间的欧几里得距离double distance(Point2D a, Point2D b) {double dx = a.x - b.x;double dy = a.y - b.y;return std::sqrt(dx * dx + dy * dy);}// 检查是否需要搜索更远的子树bool shouldSearchFarSubtree(KDTreeNode* node, Point2D target, double bestDistance) {int axis = node->point.x > target.x ? 0 : 1; // 如果轴线是x,则比较x坐标;如果轴线是y,则比较y坐标double nodeDistance = axis == 0 ? node->point.x - target.x : node->point.y - target.y;return nodeDistance * nodeDistance < bestDistance;}public:KDTree(std::vector<Point2D>& points) {root = buildKDTree(points, 0);}// 查找最近邻点Point2D findNearestNeighbor(Point2D target) {double bestDistance = std::numeric_limits<double>::max();KDTreeNode* bestNode = findNearestNeighbor(root, target, 0, nullptr, bestDistance);return bestNode->point;}
};int main() {// 创建一些二维点std::vector<Point2D> points = {{2.0, 3.0},{5.0, 4.0},{9.0, 6.0},{4.0, 7.0},{8.0, 1.0},{7.0, 2.0}};// 构建KD树KDTree kdTree(points);// 查找最近邻点Point2D target(9.0, 2.0);Point2D nearestNeighbor = kdTree.findNearestNeighbor(target);std::cout << "The nearest neighbor to (" << target.x << ", " << target.y << ") is (" << nearestNeighbor.x << ", " << nearestNeighbor.y << ")" << std::endl;return 0;
}相关文章:
数据结构——KD树
KD树(K-Dimensional Tree)是一种用于多维空间的二叉树数据结构,旨在提供高效的数据检索。KD树在空间搜索和最近邻搜索等问题中特别有用,允许在高维空间中有效地搜索数据点。 重要性质 1.分割K维数据空间的数据结构 2.是一颗二叉树…...
python趣味编程-恐龙克隆游戏
Python 中使用 Turtle 的恐龙克隆游戏免费源代码 使用 Turtle 的恐龙克隆游戏是一个用Python编程语言编码的桌面游戏应用程序。该项目包含在 Chrome 浏览器中克隆实际恐龙游戏的多种功能。该项目可以使正在修读 IT 相关课程的学生受益。这个应用程序非常有趣,可以帮助您学习创…...

【漏洞复现】泛微e-office OfficeServer2.php 存在任意文件读取漏洞复现
文章目录 前言声明一、漏洞描述二、漏洞分析三、漏洞复现四、修复建议前言 泛微e-office OfficeServer2.php 存在任意文件读取漏洞,攻击者可通过构造特定Payload获取敏感数据信息。 声明 请勿利用文章内的相关技术从事非法测试,由于传播、利用此文所提供的信息或者工具而造…...

基于Yolov8的野外烟雾检测(4):通道优先卷积注意力(CPCA),效果秒杀CBAM和SE等 | 中科院2023最新发表
目录 1.Yolov8介绍 2.野外火灾烟雾数据集介绍 3.CPCA介绍 3.1 CPCA加入到yolov8 4.训练结果分析 5.系列篇 1.Yolov8介绍 Ultralytics YOLOv8是Ultralytics公司开发的YOLO目标检测和图像分割模型的最新版本。YOLOv8是一种尖端的、最先进的(SOTA)模型&a…...

程序员必掌握的核心算法:提升编程技能的关键路径
一:引言 作为程序员,算法是我们编程生涯中的灵魂。算法是解决问题的方法和步骤,它们在计算机科学中扮演着至关重要的角色。无论你是初学者还是经验丰富的专业人士,都需要掌握一些核心算法,因为它们在各种应用场景中频…...

面试算法10:和为k的子数组
题目 输入一个整数数组和一个整数k,请问数组中有多少个数字之和等于k的连续子数组?例如,输入数组[1,1,1],k的值为2,有2个连续子数组之和等于2。 分析 在从头到尾逐个扫描数组中的数字时求出前…...

王道考研操作系统
王道考研操作系统 计算机系统概述操作系统的概念操作系统的特征操作系统的发展历程操作系统内核中断和异常系统调用操作系统结构虚拟机错题 进程与线程进程控制进程通信线程和多线程模…...

HEXO 基本使用
1 新建、编辑并预览文章 1. 新建文章 hexo new [layout] title # 或 hexo n [layout] title创建文章前要先选定模板,在hexo中也叫做布局。hexo支持三种布局(layout):post(默认)、draft、page。我们先介绍如何使用已有布局…...

Webpack Sourcemap文件泄露漏洞
Webpack Sourcemap文件泄露漏洞 前言一、Webpack和Sourcemap1.1 什么是Webpack1.2 什么是Sourcemap二、漏洞利用2.1 使用reverse-sourcemap工具2.1 直接看前端代码三、漏洞挖掘漏洞修复前言 Webpack主要是用于前端框架进行打包的工具,打包后形成.js.map文件,如果.js.map文件…...
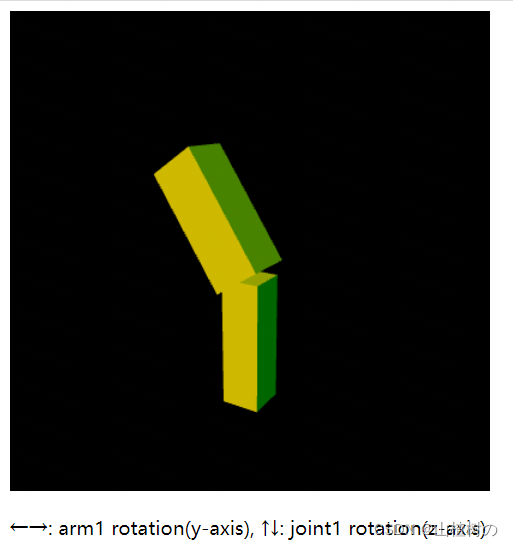
WebGL层次模型——单节点模型
目录 多个简单模型组成的复杂模型 层次结构模型 单关节模型 JointModel程序中模型的层次结构 示例程序(JointMode.js) 代码详解 绘制层次模型(draw()) 程序效果 多个简单模型组成的复杂模型 绘制…...

【链表】反转链表 II-力扣 92 题
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kuan 的首页,持续学…...

【考研数学】高等数学第六模块 —— 空间解析几何(1,向量基本概念与运算)
文章目录 引言一、空间解析几何的理论1.1 基本概念1.2 向量的运算 写在最后 引言 我自认空间想象能力较差,所以当初学这个很吃力。希望现在再接触,能好点。 一、空间解析几何的理论 1.1 基本概念 1.向量 —— 既有大小,又有方向的量称为向…...

巨人互动|Facebook海外户Facebook客户反馈分数
Facebook客户反馈分数是一项用于衡量用户对Facebook产品和服务满意度的指标。该指标被广泛应用于各种调研和评估活动,帮助Facebook了解用户对其平台和功能的意见和建议,并从中识别出改进的机会。 巨人互动|Facebook海外户&Facebook新闻提要的算法&am…...
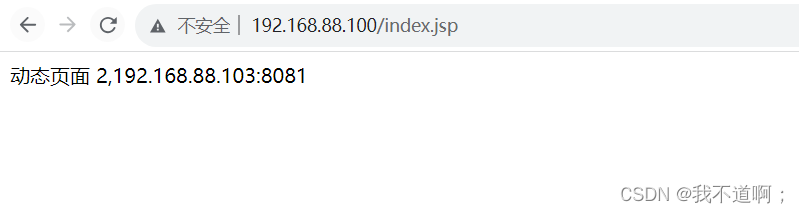
Tomcat多实例部署和动静分离
一、多实例部署: 多实例:多实例就是在一台服务器上同时开启多个不同的服务端口,同时运行多个服务进程,这些服务进程通过不同的socket监听不同的服务端口来提供服务。 1.前期准备: 1.关闭防火墙:systemctl …...

关于 C/C++ 中在指针前加 const 关键字的作用说明
1. 作用说明: 在指针前加 const 的用途为:不可改变指针指向的内存的值,即将该指向指向的内存中的变量置为只读(read-only) 变量。 但是,可以给 const 的指针赋值,即将具有 const 属性的指针指向别的内存地…...
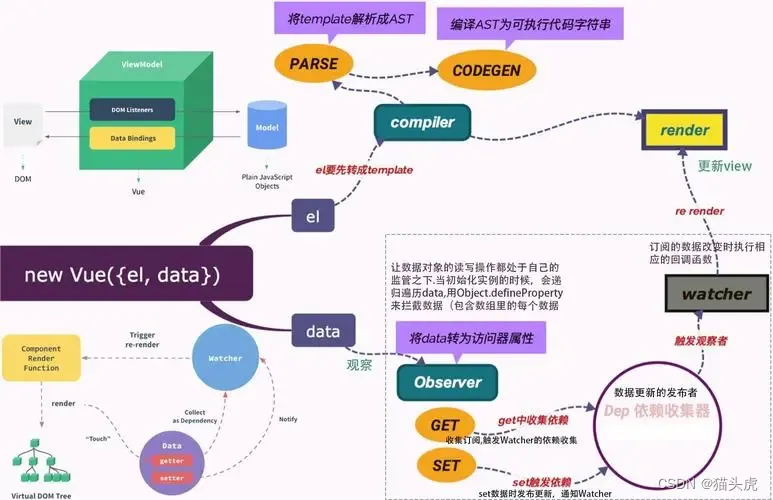
Vue.js新手指南:从零开始建立你的第一个应用
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

【案例】--EasyExcel导入导出文件案例
目录 一、前言二、EasyExcel解析(导入)文件2.1、EasyExcel选型2.2、如何存储excel解析的文件2.3、解析格式规则的excel文件2.4、解析未知格式规则的excel文件三、EasyExcel解析(导出)文件3.1、导出基本代码实现一、前言 最近项目中,需要对excel、csv等文件进行解析,并做相关…...

深入探索图像处理:从基础到高级应用
💂 个人网站:【工具大全】【游戏大全】【神级源码资源网】🤟 前端学习课程:👉【28个案例趣学前端】【400个JS面试题】💅 寻找学习交流、摸鱼划水的小伙伴,请点击【摸鱼学习交流群】 图像处理是计算机视觉领…...
Jetpack Compose基础组件 - Image
Image的源码参数预览 Composable fun Image(painter: Painter,contentDescription: String?,modifier: Modifier Modifier,alignment: Alignment Alignment.Center,contentScale: ContentScale ContentScale.Fit,alpha: Float DefaultAlpha,colorFilter: ColorFilter? …...

UINavigationController内的页面跳转实现 UIViewController 的 present和dismiss动画
UINavigationController内部页面跳转默认为左右切换,但是当我们想向上弹出进入界面,或者向下离开界面时,需要实现UINavigationControllerDelegate 协议自行控制页面的动画(否则直接在navVc上叠加动画会导致动画结束后的那个页面,自…...

【超全】基于微信小程序的心理健康服务平台【包括源码+文档+调试】
💕💕发布人: 码上青云 💕💕各类成品Java毕设 。javaweb,ssm,springboot等项目,欢迎咨询。 💕💕程序开发、技术解答、代码讲解、文档, ἱ…...
:避坑指南与实战调优)
Ubuntu18.04上从零部署BEVFusion(阿里北大版):避坑指南与实战调优
1. 环境准备与硬件选择 在Ubuntu18.04上部署BEVFusion前,硬件配置是首要考虑因素。我实测发现,官方推荐的24G显存并非虚言——当我尝试在RTX3060(12G显存)上运行时,连基础的数据预处理都无法完成。这里有个重要提醒&am…...

告别原生!用vue3-photo-preview打造移动端友好的图片浏览体验
告别原生!用vue3-photo-preview打造移动端友好的图片浏览体验 在移动互联网时代,图片浏览体验直接影响用户留存率。数据显示,移动端用户对图片加载速度的容忍度仅为2秒,而传统图片预览方案常因响应迟钝、交互生硬导致30%以上的用户…...
)
Python实战:用NumPy实现拉格朗日插值法(附完整代码与可视化)
Python实战:用NumPy实现拉格朗日插值法(附完整代码与可视化) 在数据分析和科学计算领域,插值技术是处理离散数据的重要工具。当我们只有有限个数据点却需要估计未知点的值时,拉格朗日插值法提供了一种优雅的数学解决方…...
 合并压缩提交)
SourceTree 交互式变基(rebase) 合并压缩提交
目录零. 前置条件0.1 💥超级注意事项💥0.2 开启强制推送一. 代码已提交,未推送,交互式变基1.1 通过SourceTree操作1.2 通过Git命令行操作1.2.1 进入命令行终端,指定交互变基版本1.2.2 指定需要处理的提交1.2.3 指定提交…...

EBSD数据转有限元inp格式文件:一场数据格式转换的奇妙之旅
EBSD数据转有限元inp格式文件在材料科学与工程的研究领域中,我们常常会面临将不同类型的数据转换为适合有限元分析的格式,以便更好地模拟材料的行为。今天就来聊聊如何将EBSD(电子背散射衍射)数据转换为有限元inp格式文件。 一、背…...

Qwen3-ASR-0.6B保姆级部署:CSDN GPU实例创建→安全组开放7860→镜像启动
Qwen3-ASR-0.6B保姆级部署:CSDN GPU实例创建→安全组开放7860→镜像启动 1. 前言:为什么选择Qwen3-ASR-0.6B 如果你正在寻找一个既强大又轻量的语音识别解决方案,Qwen3-ASR-0.6B绝对值得关注。这个由阿里云通义千问团队开发的开源模型&…...

51单片机 6:串口通信
目录 一、串口 1.1 简介 1.2 工作模式 1.3 基本应用 1.3.1 如何配置 1.3.2 如何发送数据 1.3.3 实践 二、串口向电脑发送数据 2.1 思路 2.2 实践 三、电脑通过串口控制LED 3.1 思路 3.2 实践 编辑 编辑 一、串口 1.1 简介 1.2 工作模式 1.3 基本应用 1.3.1…...

UROVAs 端到端自动驾驶模型训练、开闭环测试与上车联调
序言:为什么端到端训练方式如此革命性?因为它让AI自己学会开车,而不是靠人写规则。传统自动驾驶系统通常是“拼积木式”的:先做感知(识别物体)、再做定位(知道我在哪)、然后规划路径…...

抽水蓄能电站粒子群算法研究:基于成本最低调峰经济调度模型的抽水蓄能机组调度方案
抽水蓄能电站的最佳调度方案研究 关键词:抽水蓄能 最佳调度 粒子群算法 参考文献:抽水蓄能电站的最佳调度方案研究 非完全复献 仿真软件:matlab 主要内容:研究抽水蓄能机组调峰填谷的功能,目标是从电网的利益出发,结合…...