Opencv源码解析(2)算法
目录
一,直方图均衡
1,直方图统计
2,灰度变换
3,直方图均衡
二,可分离滤波器
1,可分离滤波器的工厂
2,ocvSepFilter、sepFilter2D
3,Sobel
三,相位相关法 phaseCorrelate
1,phaseCorrelate
2,汉宁窗
四,匹配器
1,纯虚类DescriptorMatcher
2,子类FlannBasedMatcher
3,knnMatch算法
一,直方图均衡
opencv-4.2.0\modules\imgproc\src\histogram.cpp 中的代码:
1,直方图统计
class EqualizeHistCalcHist_Invoker : public cv::ParallelLoopBody
{
public:enum {HIST_SZ = 256};EqualizeHistCalcHist_Invoker(cv::Mat& src, int* histogram, cv::Mutex* histogramLock): src_(src), globalHistogram_(histogram), histogramLock_(histogramLock){ }void operator()( const cv::Range& rowRange ) const CV_OVERRIDE{int localHistogram[HIST_SZ] = {0, };const size_t sstep = src_.step;int width = src_.cols;int height = rowRange.end - rowRange.start;if (src_.isContinuous()){width *= height;height = 1;}for (const uchar* ptr = src_.ptr<uchar>(rowRange.start); height--; ptr += sstep){int x = 0;for (; x <= width - 4; x += 4){int t0 = ptr[x], t1 = ptr[x+1];localHistogram[t0]++; localHistogram[t1]++;t0 = ptr[x+2]; t1 = ptr[x+3];localHistogram[t0]++; localHistogram[t1]++;}for (; x < width; ++x)localHistogram[ptr[x]]++;}cv::AutoLock lock(*histogramLock_);for( int i = 0; i < HIST_SZ; i++ )globalHistogram_[i] += localHistogram[i];}static bool isWorthParallel( const cv::Mat& src ){return ( src.total() >= 640*480 );}private:EqualizeHistCalcHist_Invoker& operator=(const EqualizeHistCalcHist_Invoker&);cv::Mat& src_;int* globalHistogram_;cv::Mutex* histogramLock_;
};类继承了ParallelLoopBody,可以做并行加速。
灰度级HIST_SZ = 256
构造函数保存三个参数。
仿函数是统计直方图。
isWorthParallel函数是判断是否启用并行加速。
2,灰度变换
class EqualizeHistLut_Invoker : public cv::ParallelLoopBody
{
public:EqualizeHistLut_Invoker( cv::Mat& src, cv::Mat& dst, int* lut ): src_(src),dst_(dst),lut_(lut){ }void operator()( const cv::Range& rowRange ) const CV_OVERRIDE{const size_t sstep = src_.step;const size_t dstep = dst_.step;int width = src_.cols;int height = rowRange.end - rowRange.start;int* lut = lut_;if (src_.isContinuous() && dst_.isContinuous()){width *= height;height = 1;}const uchar* sptr = src_.ptr<uchar>(rowRange.start);uchar* dptr = dst_.ptr<uchar>(rowRange.start);for (; height--; sptr += sstep, dptr += dstep){int x = 0;for (; x <= width - 4; x += 4){int v0 = sptr[x];int v1 = sptr[x+1];int x0 = lut[v0];int x1 = lut[v1];dptr[x] = (uchar)x0;dptr[x+1] = (uchar)x1;v0 = sptr[x+2];v1 = sptr[x+3];x0 = lut[v0];x1 = lut[v1];dptr[x+2] = (uchar)x0;dptr[x+3] = (uchar)x1;}for (; x < width; ++x)dptr[x] = (uchar)lut[sptr[x]];}}static bool isWorthParallel( const cv::Mat& src ){return ( src.total() >= 640*480 );}private:EqualizeHistLut_Invoker& operator=(const EqualizeHistLut_Invoker&);cv::Mat& src_;cv::Mat& dst_;int* lut_;
};构造函数保存三个参数。
仿函数是根据灰度变换表lut,把原图变成目标图。
3,直方图均衡
void cv::equalizeHist( InputArray _src, OutputArray _dst )
{CV_INSTRUMENT_REGION();CV_Assert( _src.type() == CV_8UC1 );if (_src.empty())return;CV_OCL_RUN(_src.dims() <= 2 && _dst.isUMat(),ocl_equalizeHist(_src, _dst))Mat src = _src.getMat();_dst.create( src.size(), src.type() );Mat dst = _dst.getMat();CV_OVX_RUN(!ovx::skipSmallImages<VX_KERNEL_EQUALIZE_HISTOGRAM>(src.cols, src.rows),openvx_equalize_hist(src, dst))Mutex histogramLockInstance;const int hist_sz = EqualizeHistCalcHist_Invoker::HIST_SZ;int hist[hist_sz] = {0,};int lut[hist_sz];EqualizeHistCalcHist_Invoker calcBody(src, hist, &histogramLockInstance);EqualizeHistLut_Invoker lutBody(src, dst, lut);cv::Range heightRange(0, src.rows);if(EqualizeHistCalcHist_Invoker::isWorthParallel(src))parallel_for_(heightRange, calcBody);elsecalcBody(heightRange);int i = 0;while (!hist[i]) ++i;int total = (int)src.total();if (hist[i] == total){dst.setTo(i);return;}float scale = (hist_sz - 1.f)/(total - hist[i]);int sum = 0;for (lut[i++] = 0; i < hist_sz; ++i){sum += hist[i];lut[i] = saturate_cast<uchar>(sum * scale);}if(EqualizeHistLut_Invoker::isWorthParallel(src))parallel_for_(heightRange, lutBody);elselutBody(heightRange);
}先是直方图统计,然后是对于纯色图片的特殊处理(直方图均衡结果等于原图),再是计算灰度变换表lut,最后把原图变成目标图。
二,可分离滤波器
1,可分离滤波器的工厂
Ptr<FilterEngine> createSeparableLinearFilter(int _srcType, int _dstType,InputArray __rowKernel, InputArray __columnKernel,Point _anchor, double _delta,int _rowBorderType, int _columnBorderType,const Scalar& _borderValue)
{Mat _rowKernel = __rowKernel.getMat(), _columnKernel = __columnKernel.getMat();_srcType = CV_MAT_TYPE(_srcType);_dstType = CV_MAT_TYPE(_dstType);int sdepth = CV_MAT_DEPTH(_srcType), ddepth = CV_MAT_DEPTH(_dstType);int cn = CV_MAT_CN(_srcType);CV_Assert( cn == CV_MAT_CN(_dstType) );int rsize = _rowKernel.rows + _rowKernel.cols - 1;int csize = _columnKernel.rows + _columnKernel.cols - 1;if( _anchor.x < 0 )_anchor.x = rsize/2;if( _anchor.y < 0 )_anchor.y = csize/2;int rtype = getKernelType(_rowKernel,_rowKernel.rows == 1 ? Point(_anchor.x, 0) : Point(0, _anchor.x));int ctype = getKernelType(_columnKernel,_columnKernel.rows == 1 ? Point(_anchor.y, 0) : Point(0, _anchor.y));Mat rowKernel, columnKernel;bool isBitExactMode = false;int bdepth = std::max(CV_32F,std::max(sdepth, ddepth));int bits = 0;if( sdepth == CV_8U &&((rtype == KERNEL_SMOOTH+KERNEL_SYMMETRICAL &&ctype == KERNEL_SMOOTH+KERNEL_SYMMETRICAL &&ddepth == CV_8U) ||((rtype & (KERNEL_SYMMETRICAL+KERNEL_ASYMMETRICAL)) &&(ctype & (KERNEL_SYMMETRICAL+KERNEL_ASYMMETRICAL)) &&(rtype & ctype & KERNEL_INTEGER) &&ddepth == CV_16S)) ){int bits_ = ddepth == CV_8U ? 8 : 0;bool isValidBitExactRowKernel = createBitExactKernel_32S(_rowKernel, rowKernel, bits_);bool isValidBitExactColumnKernel = createBitExactKernel_32S(_columnKernel, columnKernel, bits_);if (!isValidBitExactRowKernel){CV_LOG_DEBUG(NULL, "createSeparableLinearFilter: bit-exact row-kernel can't be applied: ksize=" << _rowKernel.total());}else if (!isValidBitExactColumnKernel){CV_LOG_DEBUG(NULL, "createSeparableLinearFilter: bit-exact column-kernel can't be applied: ksize=" << _columnKernel.total());}else{bdepth = CV_32S;bits = bits_;bits *= 2;_delta *= (1 << bits);isBitExactMode = true;}}if (!isBitExactMode){if( _rowKernel.type() != bdepth )_rowKernel.convertTo( rowKernel, bdepth );elserowKernel = _rowKernel;if( _columnKernel.type() != bdepth )_columnKernel.convertTo( columnKernel, bdepth );elsecolumnKernel = _columnKernel;}int _bufType = CV_MAKETYPE(bdepth, cn);Ptr<BaseRowFilter> _rowFilter = getLinearRowFilter(_srcType, _bufType, rowKernel, _anchor.x, rtype);Ptr<BaseColumnFilter> _columnFilter = getLinearColumnFilter(_bufType, _dstType, columnKernel, _anchor.y, ctype, _delta, bits );return Ptr<FilterEngine>( new FilterEngine(Ptr<BaseFilter>(), _rowFilter, _columnFilter,_srcType, _dstType, _bufType, _rowBorderType, _columnBorderType, _borderValue ));
}前2个参数是输入输出图像的格式,接下来2个参数是核分离出来的行向量和列向量。
函数返回一个FilterEngine对象,其中保存了一些需要的信息。
2,ocvSepFilter、sepFilter2D
static void ocvSepFilter(int stype, int dtype, int ktype,uchar* src_data, size_t src_step, uchar* dst_data, size_t dst_step,int width, int height, int full_width, int full_height,int offset_x, int offset_y,uchar * kernelx_data, int kernelx_len,uchar * kernely_data, int kernely_len,int anchor_x, int anchor_y, double delta, int borderType)
{Mat kernelX(Size(kernelx_len, 1), ktype, kernelx_data);Mat kernelY(Size(kernely_len, 1), ktype, kernely_data);Ptr<FilterEngine> f = createSeparableLinearFilter(stype, dtype, kernelX, kernelY,Point(anchor_x, anchor_y),delta, borderType & ~BORDER_ISOLATED);Mat src(Size(width, height), stype, src_data, src_step);Mat dst(Size(width, height), dtype, dst_data, dst_step);f->apply(src, dst, Size(full_width, full_height), Point(offset_x, offset_y));
};先创建FilterEngine对象,然后调用它的apply方法进行滤波。
void sepFilter2D(int stype, int dtype, int ktype,uchar* src_data, size_t src_step, uchar* dst_data, size_t dst_step,int width, int height, int full_width, int full_height,int offset_x, int offset_y,uchar * kernelx_data, int kernelx_len,uchar * kernely_data, int kernely_len,int anchor_x, int anchor_y, double delta, int borderType)
{bool res = replacementSepFilter(stype, dtype, ktype,src_data, src_step, dst_data, dst_step,width, height, full_width, full_height,offset_x, offset_y,kernelx_data, kernelx_len,kernely_data, kernely_len,anchor_x, anchor_y, delta, borderType);if (res)return;ocvSepFilter(stype, dtype, ktype,src_data, src_step, dst_data, dst_step,width, height, full_width, full_height,offset_x, offset_y,kernelx_data, kernelx_len,kernely_data, kernely_len,anchor_x, anchor_y, delta, borderType);
}调用ocvSepFilter
3,Sobel
void cv::Sobel( InputArray _src, OutputArray _dst, int ddepth, int dx, int dy,int ksize, double scale, double delta, int borderType )
{CV_INSTRUMENT_REGION();int stype = _src.type(), sdepth = CV_MAT_DEPTH(stype), cn = CV_MAT_CN(stype);if (ddepth < 0)ddepth = sdepth;int dtype = CV_MAKE_TYPE(ddepth, cn);_dst.create( _src.size(), dtype );int ktype = std::max(CV_32F, std::max(ddepth, sdepth));Mat kx, ky;getDerivKernels( kx, ky, dx, dy, ksize, false, ktype );if( scale != 1 ){// usually the smoothing part is the slowest to compute,// so try to scale it instead of the faster differentiating partif( dx == 0 )kx *= scale;elseky *= scale;}CV_OCL_RUN(ocl::isOpenCLActivated() && _dst.isUMat() && _src.dims() <= 2 && ksize == 3 &&(size_t)_src.rows() > ky.total() && (size_t)_src.cols() > kx.total(),ocl_sepFilter3x3_8UC1(_src, _dst, ddepth, kx, ky, delta, borderType));CV_OCL_RUN(ocl::isOpenCLActivated() && _dst.isUMat() && _src.dims() <= 2 && (size_t)_src.rows() > kx.total() && (size_t)_src.cols() > kx.total(),ocl_sepFilter2D(_src, _dst, ddepth, kx, ky, Point(-1, -1), delta, borderType))Mat src = _src.getMat();Mat dst = _dst.getMat();Point ofs;Size wsz(src.cols, src.rows);if(!(borderType & BORDER_ISOLATED))src.locateROI( wsz, ofs );CALL_HAL(sobel, cv_hal_sobel, src.ptr(), src.step, dst.ptr(), dst.step, src.cols, src.rows, sdepth, ddepth, cn,ofs.x, ofs.y, wsz.width - src.cols - ofs.x, wsz.height - src.rows - ofs.y, dx, dy, ksize, scale, delta, borderType&~BORDER_ISOLATED);CV_OVX_RUN(true,openvx_sobel(src, dst, dx, dy, ksize, scale, delta, borderType))//CV_IPP_RUN_FAST(ipp_Deriv(src, dst, dx, dy, ksize, scale, delta, borderType));sepFilter2D(src, dst, ddepth, kx, ky, Point(-1, -1), delta, borderType );
}前三个参数是输入图像、输出图像及深度,接下来2个参数是微分的阶。
三,相位相关法 phaseCorrelate
phaseCorrelate函数是利用相位相关法,给两张图片做频域配准。
1,phaseCorrelate
modules\imgproc\src\phasecorr.cpp
cv::Point2d cv::phaseCorrelate(InputArray _src1, InputArray _src2, InputArray _window, double* response)
{CV_INSTRUMENT_REGION();Mat src1 = _src1.getMat();Mat src2 = _src2.getMat();Mat window = _window.getMat();CV_Assert( src1.type() == src2.type());CV_Assert( src1.type() == CV_32FC1 || src1.type() == CV_64FC1 );CV_Assert( src1.size == src2.size);if(!window.empty()){CV_Assert( src1.type() == window.type());CV_Assert( src1.size == window.size);}int M = getOptimalDFTSize(src1.rows);int N = getOptimalDFTSize(src1.cols);Mat padded1, padded2, paddedWin;if(M != src1.rows || N != src1.cols){copyMakeBorder(src1, padded1, 0, M - src1.rows, 0, N - src1.cols, BORDER_CONSTANT, Scalar::all(0));copyMakeBorder(src2, padded2, 0, M - src2.rows, 0, N - src2.cols, BORDER_CONSTANT, Scalar::all(0));if(!window.empty()){copyMakeBorder(window, paddedWin, 0, M - window.rows, 0, N - window.cols, BORDER_CONSTANT, Scalar::all(0));}}else{padded1 = src1;padded2 = src2;paddedWin = window;}Mat FFT1, FFT2, P, Pm, C;// perform window multiplication if availableif(!paddedWin.empty()){// apply window to both images before proceeding...multiply(paddedWin, padded1, padded1);multiply(paddedWin, padded2, padded2);}// execute phase correlation equation// Reference: http://en.wikipedia.org/wiki/Phase_correlationdft(padded1, FFT1, DFT_REAL_OUTPUT);dft(padded2, FFT2, DFT_REAL_OUTPUT);mulSpectrums(FFT1, FFT2, P, 0, true);magSpectrums(P, Pm);divSpectrums(P, Pm, C, 0, false); // FF* / |FF*| (phase correlation equation completed here...)idft(C, C); // gives us the nice peak shift location...fftShift(C); // shift the energy to the center of the frame.// locate the highest peakPoint peakLoc;minMaxLoc(C, NULL, NULL, NULL, &peakLoc);// get the phase shift with sub-pixel accuracy, 5x5 window seems about right here...Point2d t;t = weightedCentroid(C, peakLoc, Size(5, 5), response);// max response is M*N (not exactly, might be slightly larger due to rounding errors)if(response)*response /= M*N;// adjust shift relative to image center...Point2d center((double)padded1.cols / 2.0, (double)padded1.rows / 2.0);return (center - t);
}前两个参数是传2张图片,第三个是应用窗函数去除图像的边界效应,文档中推荐使用汉宁窗。
2,汉宁窗
void cv::createHanningWindow(OutputArray _dst, cv::Size winSize, int type)
{CV_INSTRUMENT_REGION();CV_Assert( type == CV_32FC1 || type == CV_64FC1 );CV_Assert( winSize.width > 1 && winSize.height > 1 );_dst.create(winSize, type);Mat dst = _dst.getMat();int rows = dst.rows, cols = dst.cols;AutoBuffer<double> _wc(cols);double* const wc = _wc.data();double coeff0 = 2.0 * CV_PI / (double)(cols - 1), coeff1 = 2.0f * CV_PI / (double)(rows - 1);for(int j = 0; j < cols; j++)wc[j] = 0.5 * (1.0 - cos(coeff0 * j));if(dst.depth() == CV_32F){for(int i = 0; i < rows; i++){float* dstData = dst.ptr<float>(i);double wr = 0.5 * (1.0 - cos(coeff1 * i));for(int j = 0; j < cols; j++)dstData[j] = (float)(wr * wc[j]);}}else{for(int i = 0; i < rows; i++){double* dstData = dst.ptr<double>(i);double wr = 0.5 * (1.0 - cos(coeff1 * i));for(int j = 0; j < cols; j++)dstData[j] = wr * wc[j];}}// perform batch sqrt for SSE performance gainscv::sqrt(dst, dst);
}
四,匹配器
opencv-4.2.0\modules\features2d\src\matchers.cpp中的代码:
1,纯虚类DescriptorMatcher
内含3种匹配算法:
class CV_EXPORTS_W DescriptorMatcher : public Algorithm
{
public:
CV_WRAP void match( InputArray queryDescriptors, InputArray trainDescriptors,CV_OUT std::vector<DMatch>& matches, InputArray mask=noArray() ) const;
CV_WRAP void knnMatch( InputArray queryDescriptors, InputArray trainDescriptors,CV_OUT std::vector<std::vector<DMatch> >& matches, int k,InputArray mask=noArray(), bool compactResult=false ) const;
CV_WRAP void radiusMatch( InputArray queryDescriptors, InputArray trainDescriptors,CV_OUT std::vector<std::vector<DMatch> >& matches, float maxDistance,InputArray mask=noArray(), bool compactResult=false ) const;
CV_WRAP void match( InputArray queryDescriptors, CV_OUT std::vector<DMatch>& matches,InputArrayOfArrays masks=noArray() );
CV_WRAP void knnMatch( InputArray queryDescriptors, CV_OUT std::vector<std::vector<DMatch> >& matches, int k,InputArrayOfArrays masks=noArray(), bool compactResult=false );
CV_WRAP void radiusMatch( InputArray queryDescriptors, CV_OUT std::vector<std::vector<DMatch> >& matches, float maxDistance,InputArrayOfArrays masks=noArray(), bool compactResult=false );
。。。。。。
};DescriptorMatcher内含纯虚函数clone()
match里面还是调knnMatch,所以实际上是knnMatch和radiusMatch两种算法。
2,子类FlannBasedMatcher
继承DescriptorMatcher
class CV_EXPORTS_W FlannBasedMatcher : public DescriptorMatcher
{
public:CV_WRAP FlannBasedMatcher( const Ptr<flann::IndexParams>& indexParams=makePtr<flann::KDTreeIndexParams>(),const Ptr<flann::SearchParams>& searchParams=makePtr<flann::SearchParams>() );
......
};(1)clone
创建一个实例
(2)算法
算法没有重载,也没有重写,直接是父类的函数。
3,knnMatch算法
void DescriptorMatcher::knnMatch( InputArray queryDescriptors, InputArray trainDescriptors,std::vector<std::vector<DMatch> >& matches, int knn,InputArray mask, bool compactResult ) const
{CV_INSTRUMENT_REGION();Ptr<DescriptorMatcher> tempMatcher = clone(true);tempMatcher->add(trainDescriptors);tempMatcher->knnMatch( queryDescriptors, matches, knn, std::vector<Mat>(1, mask.getMat()), compactResult );
}
void DescriptorMatcher::knnMatch( InputArray queryDescriptors, std::vector<std::vector<DMatch> >& matches, int knn,InputArrayOfArrays masks, bool compactResult )
{CV_INSTRUMENT_REGION();if( empty() || queryDescriptors.empty() )return;CV_Assert( knn > 0 );checkMasks( masks, queryDescriptors.size().height );train();knnMatchImpl( queryDescriptors, matches, knn, masks, compactResult );
}核心功能用impl技术存在knnMatchImpl里面了。
相关文章:
算法)
Opencv源码解析(2)算法
目录 一,直方图均衡 1,直方图统计 2,灰度变换 3,直方图均衡 二,可分离滤波器 1,可分离滤波器的工厂 2,ocvSepFilter、sepFilter2D 3,Sobel 三,相位相关法 phase…...
让Mac菜单栏变得更加美观整洁——Bartender 5
Bartender 5是一款Mac电脑上的菜单栏图标管理软件,能够帮助您把菜单栏上的图标整理得更加美观、整洁和易于使用。如果您的菜单栏上充斥着许多图标,导致视觉上很不舒适和疲劳,那么Bartender 5就是解决这一问题的最佳选择! Bartend…...

服务器迁移:无缝过渡指南
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

安卓开发中ViewBinding的使用
在安卓开发中,ViewBing 的作用就是简化 findViewById() 代码的写法。 看看下面的替换: etbinding.text //etfindViewById(R.id.text) 下面就看看怎么用的, 首先,打开app模块的build.gradle,然后添加如下代码&…...
【初阶数据结构】树(tree)的基本概念——C语言
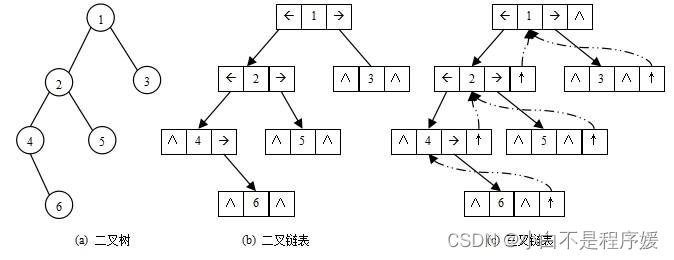
目录 一、树(tree) 1.1树的概念及结构 1.2树的相关概念 1.3树的表示 1.4树在实际中的运用(表示文件系统的目录树结构) 二、二叉树的概念及结构 2.1二叉树的概念 2.2现实中真正的二叉树 2.3特殊的二叉树 2.4二叉树的性质…...
二叉树知识点
1.霍夫曼编码 这位作者写的很清楚 哈夫曼编码详解——图解真能看了秒懂_已知字符集abcdef,若各字符出现的次数_Young_IT的博客-CSDN博客 2.满二叉树与完全二叉树 满二叉树是指每层数量是pow(2,n-1)个节点,总节点数是pow(2,n)-1; 而完全二叉树是指最后一层不一定…...
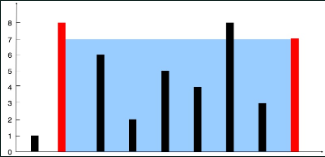
Day69:283. 移动零、11. 盛最多水的容器、42. 接雨水
283. 移动零 leetcode链接:https://leetcode.cn/problems/move-zeroes/ 给定一个数组 nums,编写一个函数将所有 0 移动到数组的末尾,同时保持非零元素的相对顺序。请注意 ,必须在不复制数组的情况下原地对数组进行操作。示例 1:…...

tensorrt的安装和使用
安装 提前安装好 CUDA 和 CUDNN,登录 NVIDIA 官方网站下载和主机 CUDA 版本适配的 TensorRT 压缩包即可。 以 CUDA 版本是 10.2 为例,选择适配 CUDA 10.2 的 tar 包,然后执行类似如下的命令安装并测试: #安装c版本 cd /the/pat…...
电压放大器在电子测试中的应用有哪些方面
电压放大器是一种常见的电子设备,广泛应用于各种测试和测量应用中。以下是电压放大器在电子测试中的几个主要方面应用的简要介绍。 信号采集与处理:电压放大器通常用于信号采集和处理,在测试过程中将低电平信号放大到适合进一步处理或分析的水…...

39.地址算术运算
如果p是一个指向数组中某个元素的指针,那么p将会对p进行自增运算并指向下一个元素,而pi将对p进行加i的增量运算,使其指向指针p当前所指向的元素之后的第i个元素。这类运算时指针或地址算术运算中最简单的形式。 allocbuf中的空间使用状况也是…...

没有外网的麒麟系统上搭建GitLab服务并且无需客户端账号密码验证
要在没有外网的麒麟系统上搭建GitLab服务并且无需客户端账号密码验证,可以按照以下步骤进行操作: 安装必要的依赖包和软件 sudo yum install curl policycoreutils-python openssh-server openssh-clients sudo systemctl enable sshd sudo systemctl …...

微服务生态系统:使用Spring Cloud构建分布式系统
文章目录 什么是微服务?为什么选择Spring Cloud?Spring Cloud的关键组件示例:构建一个简单的微服务步骤1:创建Spring Boot项目步骤2:配置Eureka服务发现步骤3:创建REST控制器步骤4:运行项目步骤…...

DIY 一个汽车方向盘游戏外设(MMOS OSW DIY)
OSW-MMOS直驱方向盘DIY过程记录 - 简书 (jianshu.com) DIY 一个汽车方向盘游戏外设(MMOS OSW DIY) 首先讲一下这个直驱系统大概的框架,首先是电脑,电脑里装MMOS的软件(这个软件国内高手把它汉化了的),电脑通过USB线&a…...

校园网络技术需求分析
路由技术: 路由协议工作在 OSI 参考模型的第 3 层,因此它的作用主要是在通信 子网间路由数据包。路由器具有在网络中传递数据时选择最佳路径的能力。 除了可以完成主要的路由任务,利用访问控制列表(Access Control List&#x…...
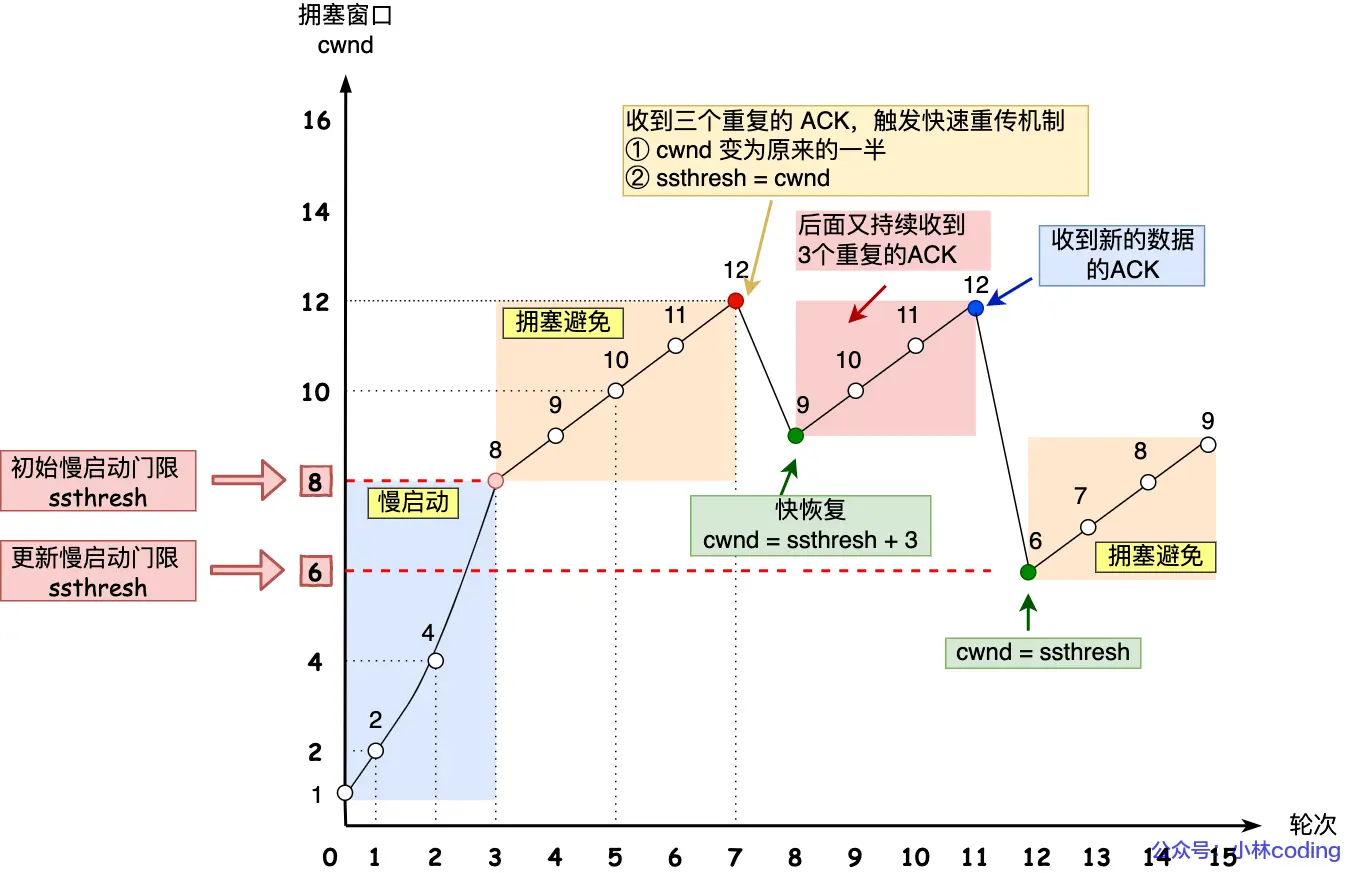
计算机网络(二):TCP篇
文章目录 1. TCP头部包含哪些内容?2. 为什么需要 TCP 协议? TCP 工作在哪一层?3. 什么是 TCP ?4. 什么是 TCP 连接?5. 如何唯一确定一个 TCP 连接呢?6. UDP头部大小是多少?包含哪些内容…...

测试登录界面:Python
import unittest from selenium import webdriver class LoginTest(unittest.TestCase): def setUp(self): self.driver webdriver.Chrome() def test_login(self): # 打开登录页面 self.driver.get("http://example.com/login") # 输入用户名和密码 user…...

Rust踩雷笔记(7)——两个链表题例子初识裸指针
目录 leetcode 234leetcode 19 leetcode 234 题目在这https://leetcode.cn/problems/palindrome-linked-list/,leetcode 234的回文链表,思路很简单,就是fast和slow两个指针,fast一次移动两个、slow一次一个,最后slow指…...

用什么命令看Linux系统的体系架构
要查看Linux系统的体系架构,可以使用uname命令。在终端中运行以下命令: uname -m该命令将返回系统的体系架构,例如x86_64表示64位系统,i686表示32位系统。 uname 使用方法 uname命令用于获取操作系统的相关信息。它可以用于显示…...

消息中间件大揭秘:选择之前你必须知道的关键信息
Hello大家好!我是小米,很高兴再次和大家见面!今天的话题非常精彩,我们将深入探讨消息中间件,并了解一些常见的消息队列:RabbitMQ、RocketMQ、Kafka以及Redis。如果你正在准备面试,或者只是对这些…...

【Unity基础】4.动画Animation
【Unity基础】4.动画Animation 大家好,我是Lampard~~ 欢迎来到Unity基础系列博客,所学知识来自B站阿发老师~感谢 (一)Unity动画编辑器 (1)Animation组件 这一张我们要学习如何在unity编辑器中&…...

键盘键码全解析:从A到Z,数字到功能键,一篇文章搞定所有keycode查询
键盘键码全解析:从A到Z,数字到功能键,一篇文章搞定所有keycode查询 在网页交互和游戏开发中,键盘事件处理是基础却容易踩坑的环节。当你监听keydown事件时,控制台打印出的神秘数字——键码(keycode…...
)
SEO_避开这些SEO误区,让你的优化工作事半功倍(217 )
SEO:避开这些SEO误区,让你的优化工作事半功倍在当今互联网时代,搜索引擎优化(SEO)是每个网站和博客主人都必须面对的挑战。虽然SEO有很多技巧和策略,但并不是所有的方法都是有效的,有些甚至可能会导致网站被…...
大模型时代,向量嵌入才是真正的“认知底盘”:从Word2Vec到Transformer
向量嵌入(Vector Embedding)是大型语言模型(LLM)和人工智能(AI)应用的核心技术,它将文本、图片、音频等人类内容翻译成机器能计算的数字坐标,从而实现更精准的语义理解和知识检索。本…...

如何通过Universal-x86-Tuning-Utility实现x86处理器性能释放:面向硬件爱好者的智能调校方案
如何通过Universal-x86-Tuning-Utility实现x86处理器性能释放:面向硬件爱好者的智能调校方案 【免费下载链接】Universal-x86-Tuning-Utility Unlock the full potential of your Intel/AMD based device. 项目地址: https://gitcode.com/gh_mirrors/un/Universal…...
)
音乐制作人必备:GM打击乐音色表全解析(附Roland SC-88 Pro实战应用)
音乐制作人必备:GM打击乐音色表全解析(附Roland SC-88 Pro实战应用) 在数字音乐制作领域,GM(General MIDI)标准如同乐谱中的通用语言,而打击乐音色表则是这套语言中最具表现力的词汇库。无论是影…...

Megatron与DeepSpeed:大模型训练框架的融合与实战对比
1. Megatron与DeepSpeed:大模型训练的双剑合璧 第一次接触百亿参数大模型训练时,我被显存不足的报错折磨得焦头烂额。直到同事推荐了Megatron-DeepSpeed组合,才真正体会到什么叫"鸟枪换炮"。这两个框架就像深度学习界的"变形金…...

智能汽车上的救命按钮:ECALL、BCALL、ICALL功能详解与使用场景
智能汽车上的救命按钮:ECALL、BCALL、ICALL功能详解与使用场景 当驾驶智能汽车行驶在高速公路上,突然遭遇爆胎或碰撞事故时,大多数车主的第一反应往往是慌乱地寻找手机拨打救援电话。然而,在紧急情况下,每一秒都至关重…...
)
基于springboot医疗陪诊服务平台设计与开发(源码+精品论文+答辩PPT等资料)
博主介绍:CSDN毕设辅导第一人、靠谱第一人、全网粉丝50W,csdn特邀作者、博客专家、腾讯云社区合作讲师、CSDN新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交…...

C#类型转换避坑指南:为什么你的Cast方法总抛InvalidCastException?
C#类型转换避坑指南:为什么你的Cast方法总抛InvalidCastException? 在C#开发中,类型转换是每个开发者都会遇到的常见操作。特别是使用LINQ的Cast<T>方法时,稍不注意就会遇到令人头疼的InvalidCastException异常。本文将深入…...

5个步骤实现网易云音乐功能突破:BetterNCM自定义体验完全指南
5个步骤实现网易云音乐功能突破:BetterNCM自定义体验完全指南 【免费下载链接】BetterNCM-Installer 一键安装 Better 系软件 项目地址: https://gitcode.com/gh_mirrors/be/BetterNCM-Installer 为什么网易云音乐需要功能扩展?剖析3大核心痛点 …...