STM32 驱动
led 驱动
led头文件
#ifndef _LED_H
#define _LED_Hvoid LED_Init(void);
void LED_ON(void);
void LED_OFF(void);
void LED_Turn(void);#endifled代码
#include "stm32f10x.h" void LED_Init(void)
{//START CLOCKRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1 ;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);GPIO_SetBits(GPIOA,GPIO_Pin_1 );
}
void LED_ON(void){GPIO_ResetBits(GPIOA,GPIO_Pin_1);
}
void LED_OFF(void){GPIO_SetBits(GPIOA,GPIO_Pin_1);
}
void LED_Turn(void)
{if (GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_1)==0){GPIO_SetBits(GPIOA,GPIO_Pin_1);//关灯}else{GPIO_ResetBits(GPIOA,GPIO_Pin_1);//开灯}}
delay 延迟
delay头文件
#ifndef __DELAY_H
#define __DELAY_Hvoid Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);#endifdelay代码
#include "stm32f10x.h"/*** @brief 微秒级延时* @param xus 延时时长,范围:0~233015* @retval 无*/
void Delay_us(uint32_t xus)
{SysTick->LOAD = 72 * xus; //设置定时器重装值SysTick->VAL = 0x00; //清空当前计数值SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器while(!(SysTick->CTRL & 0x00010000)); //等待计数到0SysTick->CTRL = 0x00000004; //关闭定时器
}/*** @brief 毫秒级延时* @param xms 延时时长,范围:0~4294967295* @retval 无*/
void Delay_ms(uint32_t xms)
{while(xms--){Delay_us(1000);}
}/*** @brief 秒级延时* @param xs 延时时长,范围:0~4294967295* @retval 无*/
void Delay_s(uint32_t xs)
{while(xs--){Delay_ms(1000);}
} 光敏传感器
头文件
#ifndef _LightSensor_H
#define _LightSensor_Hvoid LightSensor_Init(void);
uint8_t LightSensor_Get(void);
#endif
c文件
#include "stm32f10x.h" void LightSensor_Init(void)
{//START CLOCKRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_13 ;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);
}uint8_t LightSensor_Get(void)
{return GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_13);
}
对射式红外传感器驱动
c文件
#include "stm32f10x.h" // Device headeruint16_t CountSensor_Count;void CountSensor_Init(void)
{//开启GPIOB时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);// 开启AFIO时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//初始化GPIO_InitTypeDefGPIO_InitTypeDef GPIO_InitStructure;//高电平输入GPIO_InitStructure.GPIO_Mode= GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_14;GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_InitStructure);//配置AFIOGPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);// EXTIEXTI_InitTypeDef EXTI_InitStruct;EXTI_InitStruct.EXTI_Line=EXTI_Line14 ;EXTI_InitStruct.EXTI_LineCmd=ENABLE;EXTI_InitStruct.EXTI_Mode=EXTI_Mode_Interrupt;EXTI_InitStruct.EXTI_Trigger=EXTI_Trigger_Rising;EXTI_Init(&EXTI_InitStruct);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel=EXTI15_10_IRQn;NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1;NVIC_InitStruct.NVIC_IRQChannelSubPriority=1;NVIC_Init(&NVIC_InitStruct);}void EXTI15_10_IRQHandler (void){if (EXTI_GetITStatus(EXTI_Line14)==SET){CountSensor_Count ++;EXTI_ClearITPendingBit(EXTI_Line14);}}uint16_t CountSensor_Get(void)
{return CountSensor_Count;
}// void EXTI15_10_IRQHandler(void)
// {
// if (EXTI_GetITStatus(EXTI_Line14) == SET)
// {
// /*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
// if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_14) == 0)
// {
// CountSensor_Count ++;
// }
// EXTI_ClearITPendingBit(EXTI_Line14);
// }
// }.h文件
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_Hvoid CountSensor_Init(void);
uint16_t CountSensor_Get(void);#endif```c
#ifndef __COUNT_SENSOR_H
#define __COUNT_SENSOR_Hvoid CountSensor_Init(void);
uint16_t CountSensor_Get(void);#endif5-2 旋转编码器计次
#ifndef __ENCODER_H
#define __ENCODER_Hvoid Encoder_Init(void);
int16_t Encoder_Get(void);#endif#include "stm32f10x.h" // Device headerint16_t Encoder_Count;void Encoder_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);EXTI_InitTypeDef EXTI_InitStructure;EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_Init(&EXTI_InitStructure);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;NVIC_Init(&NVIC_InitStructure);
}int16_t Encoder_Get(void)
{int16_t Temp;Temp = Encoder_Count;Encoder_Count = 0;return Temp;
}void EXTI0_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line0) == SET){/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){Encoder_Count++;}}EXTI_ClearITPendingBit(EXTI_Line0);}
}void EXTI1_IRQHandler(void)
{if (EXTI_GetITStatus(EXTI_Line1) == SET){/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0){Encoder_Count --;}}EXTI_ClearITPendingBit(EXTI_Line1);}
}TIM定时器驱动
#include "stm32f10x.h" // Device headervoid Timer_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period=10000-1;TIM_TimeBaseInitStructure.TIM_Prescaler=7200-1;TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//使能中断TIM_ClearFlag(TIM2,TIM_FLAG_Update);TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);TIM_Cmd(TIM2, ENABLE);
}
// void TIM2_IRQHandler(void)
// {
// if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
// {
// num++;
// TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
// }
// }相关文章:

STM32 驱动
led 驱动 led头文件 #ifndef _LED_H #define _LED_Hvoid LED_Init(void); void LED_ON(void); void LED_OFF(void); void LED_Turn(void);#endifled代码 #include "stm32f10x.h" void LED_Init(void) {//START CLOCKRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIO…...

JavaScript系列从入门到精通系列第五篇:JavaScript中的强制类型转换包含强制类型转换之Number,包含强制类型转换之String
文章目录 前言 一:强制类型转换 1:强制类型转换为String (一):方式一:调用被转换类型的toString()方法 (二):方式二:调用String函数 2:强制类型转换为Number (一):方式一&…...

动力节点老杜JavaWeb笔记(全)
Servlet 关于系统架构 系统架构包括什么形式? C/S架构B/S架构C/S架构? Client / Server(客户端 / 服务器)C/S架构的软件或者说系统有哪些呢? QQ(先去腾讯官网下载一个QQ软件,几十MB,然后把这个客户端软件安装上去,然后输入QQ号以及密码,登录之后,就可以和你的朋友聊…...
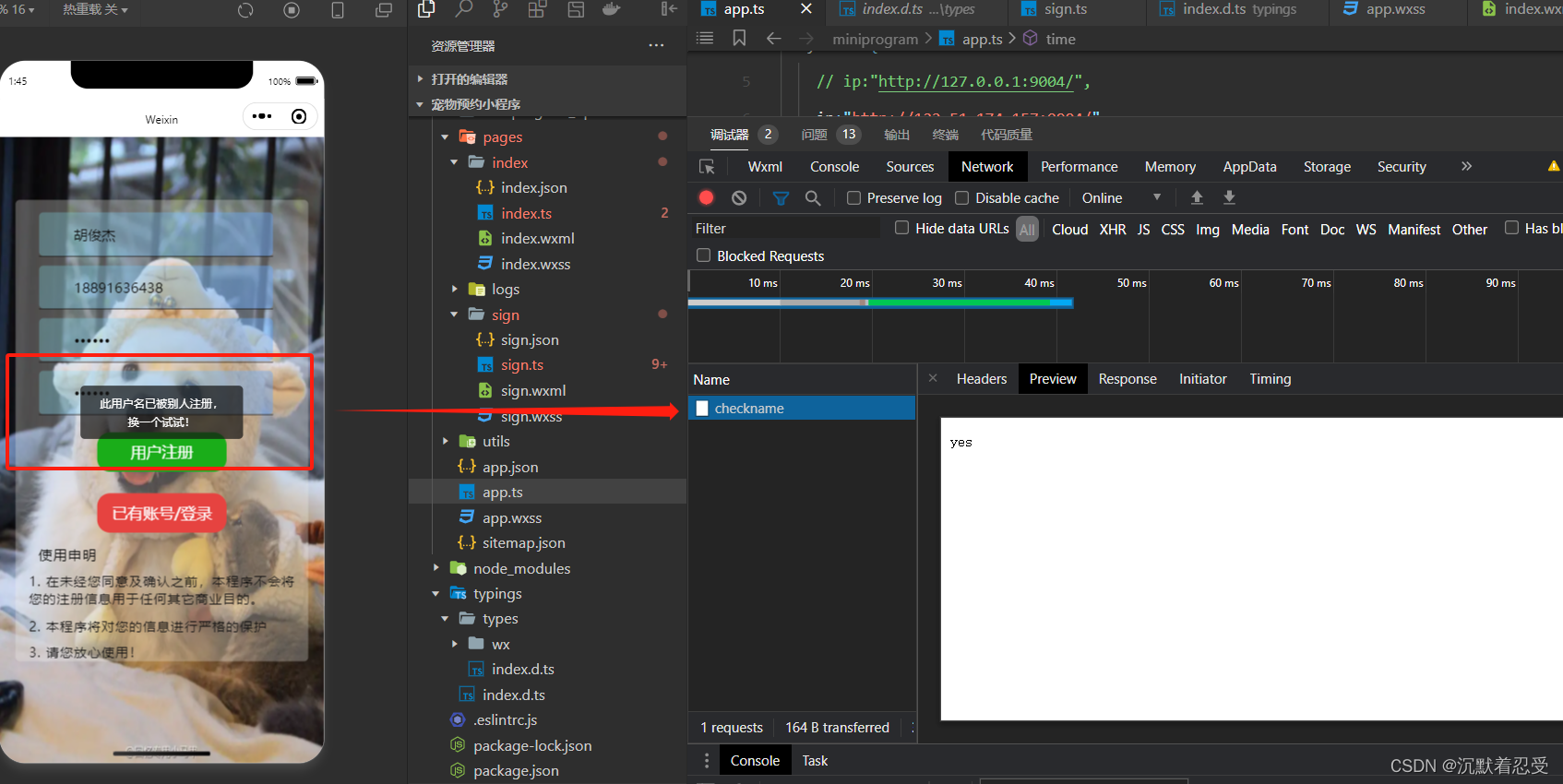
【微信小程序开发】宠物预约医疗项目实战-注册实现
【微信小程序开发】宠物预约医疗项目实战-注册实现 第二章 宠物预约医疗项目实战-注册实现 文章目录 【微信小程序开发】宠物预约医疗项目实战-注册实现前言一、打开项目文件二、编写wxss代码2.1 什么是wxss2.2 配置主程序全局样式 三. 在sign文件下的wxml文件中编写如下代码并…...

聚观早报 | 飞书签约韵达速递;蔚来首颗自研芯片“杨戬”量产
【聚观365】9月22日消息 飞书签约韵达速递 蔚来首颗自研芯片“杨戬”10月量产 靳玉志接任华为车 BU CEO 亚马逊发布全新Alexa语音助手 OpenAI推出图像生成器DALL-E 3 飞书签约韵达速递 近日,国内物流服务公司韵达快递宣布全员上飞书。飞书解决方案副总裁何斌表…...
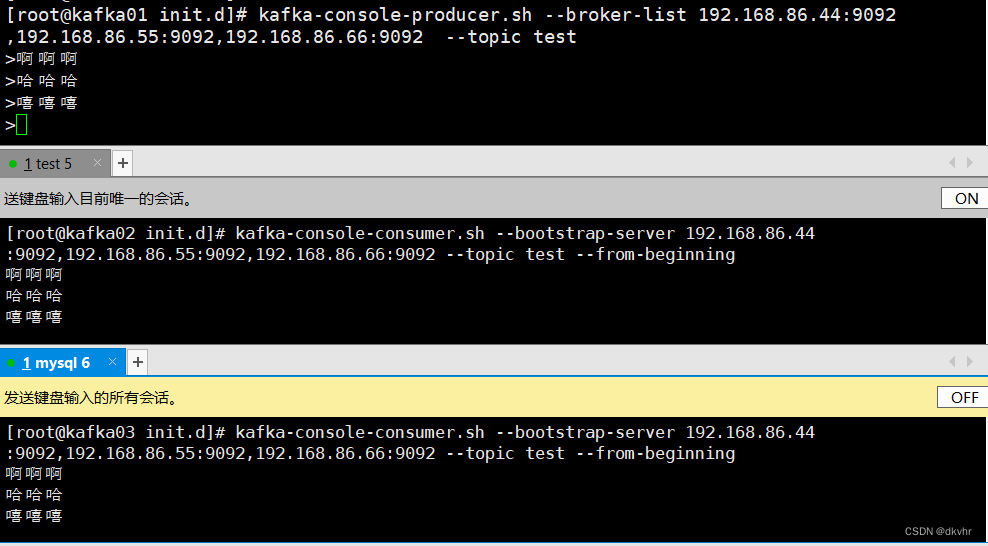
zookeeper + kafka
Zookeeper 概述 Zookeeper是一个开源的分布式服务管理框架。存储业务服务节点元数据及状态信息,并负责通知再 ZooKeeper 上注册的服务几点状态给客户端 Zookeeper 工作机制 Zookeeper从设计模式角度来理解: 是一个基于观察者模式设计的分布式服务管理框架&…...

wordpress添加评论过滤器
给wordpress添加评论过滤器,如果用户留言包含 "http" (可以为任意字符串) 就禁止提交评论。 function filter_comment_content($comment_data) {$comment_contents $comment_data["comment_content"]; //获取评论表单的内容字段if (stripos($…...
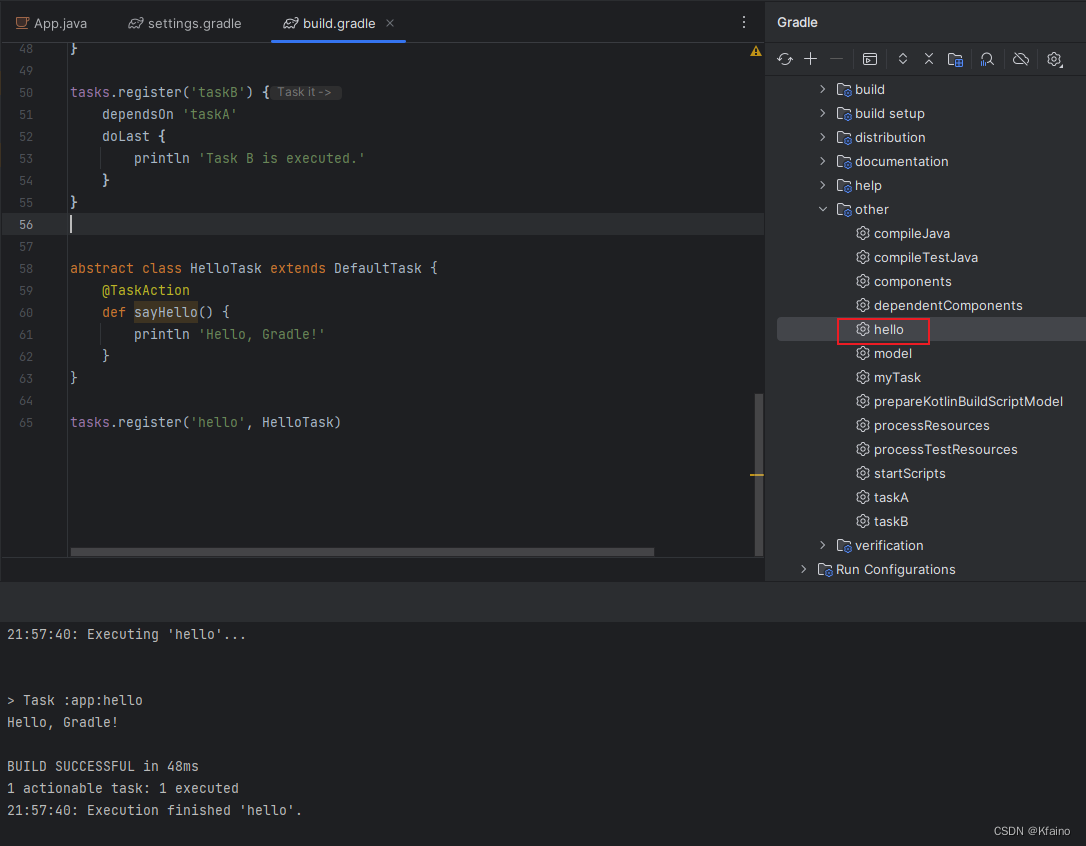
工具篇 | Gradle入门与使用指南
介绍 1.1 什么是Gradle? Gradle是一个开源构建自动化工具,专为大型项目设计。它基于DSL(领域特定语言)编写,该语言是用Groovy编写的,使得构建脚本更加简洁和强大。Gradle不仅可以构建Java应用程序&#x…...
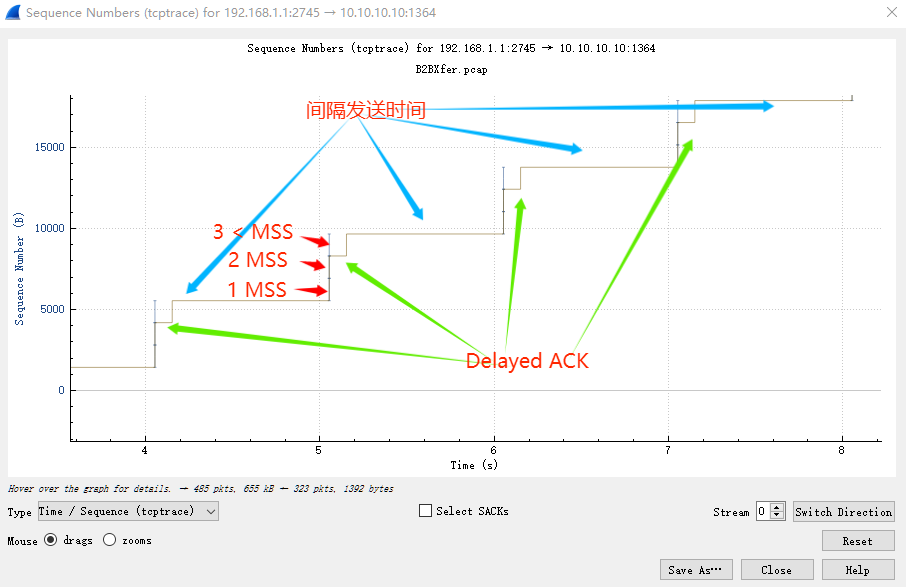
Wireshark TS | MQ 传输缓慢问题
问题背景 应用传输慢是一种比较常见的问题,慢在哪,为什么慢,有时候光从网络数据包分析方面很难回答的一清二楚,毕竟不同的技术方向专业性太强,全栈大佬只能仰望,而我们能做到的是在专注于自身的专业方向之…...
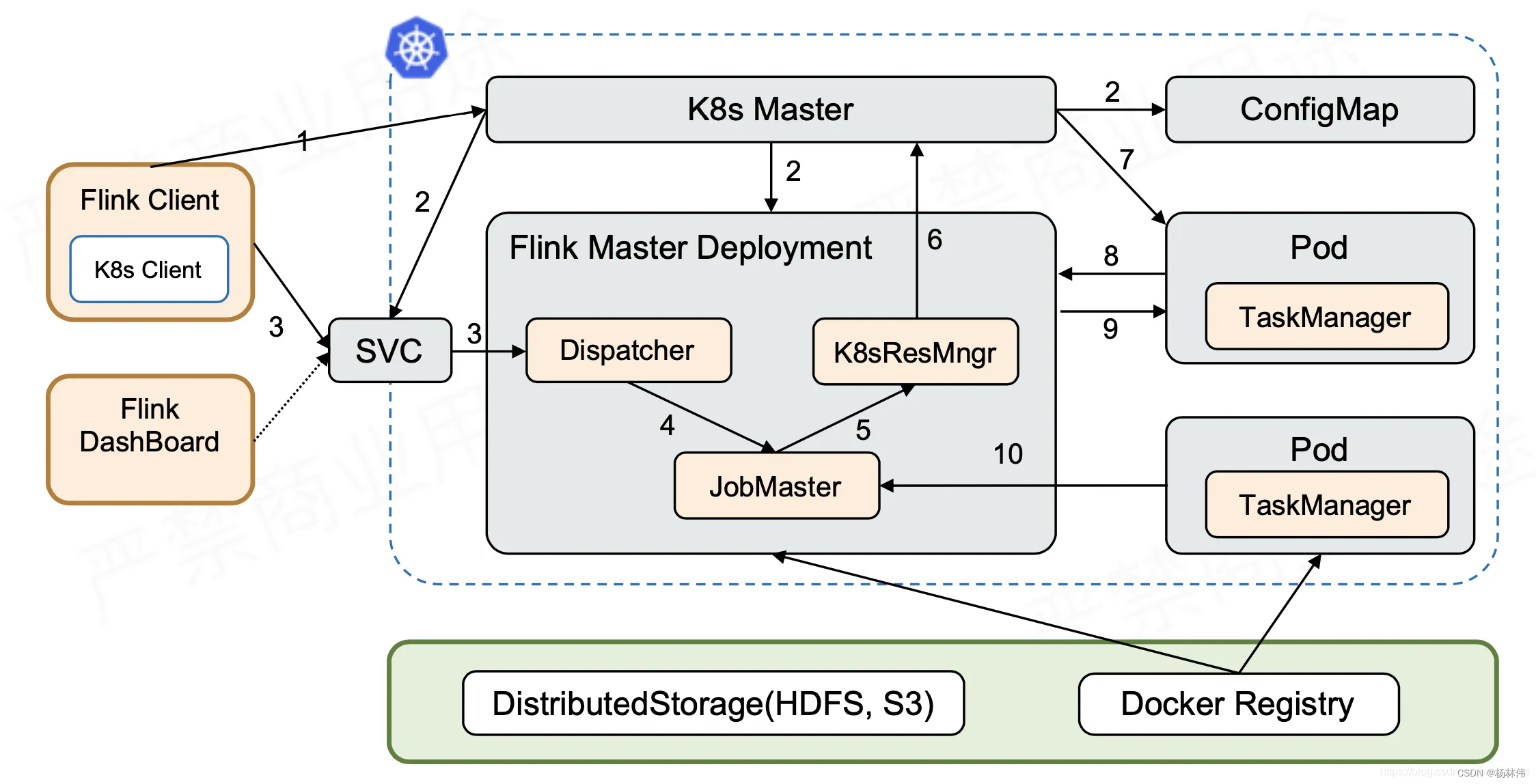
flink集群与资源@k8s源码分析-回顾
本章是分析系列最后一章,作为回顾,以运行架构图串联起所有分析场景 1 启动集群,部署集群(提交k8s),新建作业管理器组件 2 构建和启动flink master组件 3 提交作业,N/A...

学习心得09:C++新特性
现在语言越来越复杂,关键字也越来越多。所以我提出了关键字自动加标识的想法。 这些新特性也都是有用的,一般人也用不上。在这方面,我的主张是:除非你确实需要用到新特性,否则尽量不要用。保证了代码的可维护。 C很复杂…...
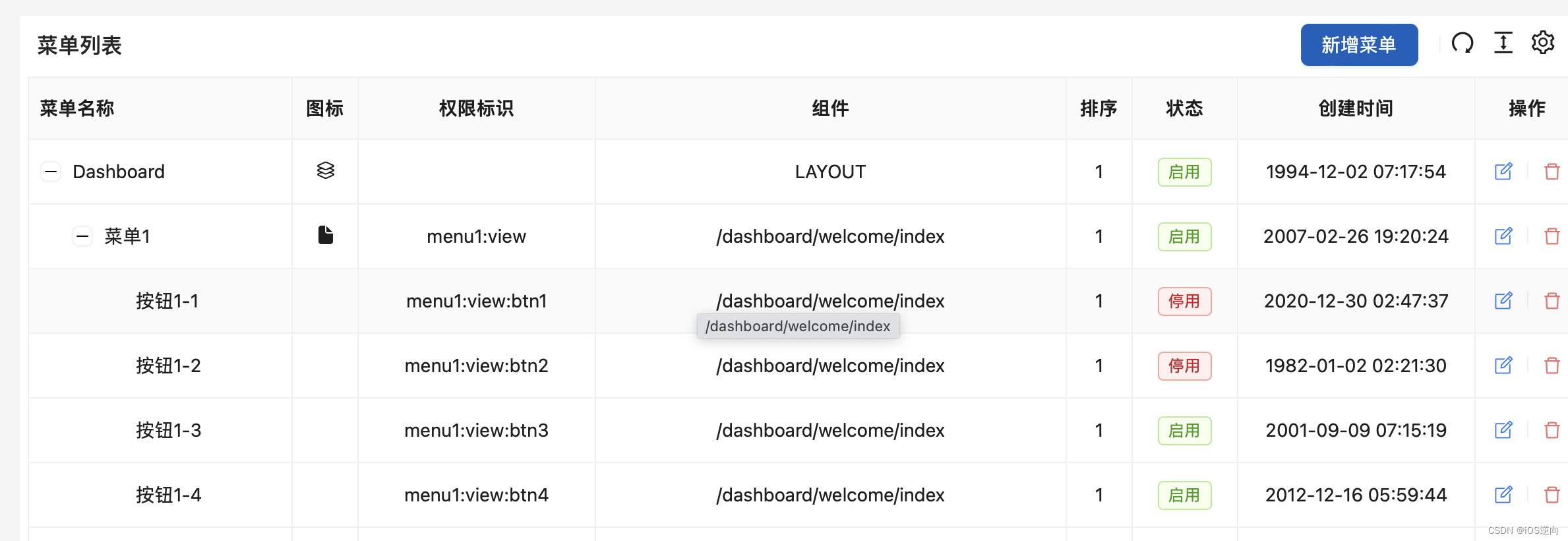
前端框架vBean admin
文章目录 引言I 数据库表设计1.1 用户表1.2 角色表1.3 菜单表II 接口引言 文档:https://doc.vvbin.cn/guide/introduction.html http://doc.vvbin.cn 仓库:https://github.com/vbenjs/vue-vben-admin git clone https://github.com/vbenjs/vue-vben-admin-doc 在线体验demo:…...

云原生周刊:Grafana Beyla 发布 | 2023.9.18
开源项目推荐 Komiser Komiser 是一个与云无关的开源资源管理器。它与多个云提供商(包括 AWS、Azure、Civo、Digital Ocean、OCI、Linode、腾讯和 Scaleway)集成,构建云资产库存,并帮助您在资源层面分解成本。 kr8s 这是一个用…...

C++ std::unique_lock 用法
文章目录 1.创建 std::unique_lock 对象2.自动加锁和解锁3.延迟加锁与手动加解锁4.尝试加锁5.配合条件变量使用6.小结参考文献 std::unique_lock 是 C11 提供的一个用于管理互斥锁的类,它提供了更灵活的锁管理功能,适用于各种多线程场景。 1.创建 std::u…...

Pytorch C++ 前端第二部分:输入、权重和偏差
本教程分为两部分 第 2.1 部分 – 基础知识速成课程。第 2.2 部分 – 使用 C++ 构建神经网络如果您已经了解神经网络的基础知识,那么无需阅读 Part-2.1 的内容,理解 Part-2.2 应该没有问题。我们试图通过动画 GIF 来可视化方程,从而使其简短而有趣。但请注意,我们根据在解释…...
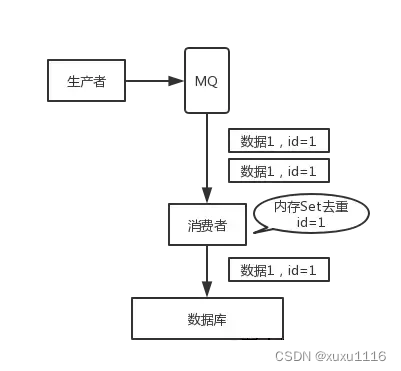
面试题:RocketMQ 如何保证消息不丢失,如何保证消息不被重复消费?
文章目录 1、消息整体处理过程Producer发送消息阶段手段一:提供SYNC的发送消息方式,等待broker处理结果。手段二:发送消息如果失败或者超时,则重新发送。手段三:broker提供多master模式,即使某台broker宕机…...
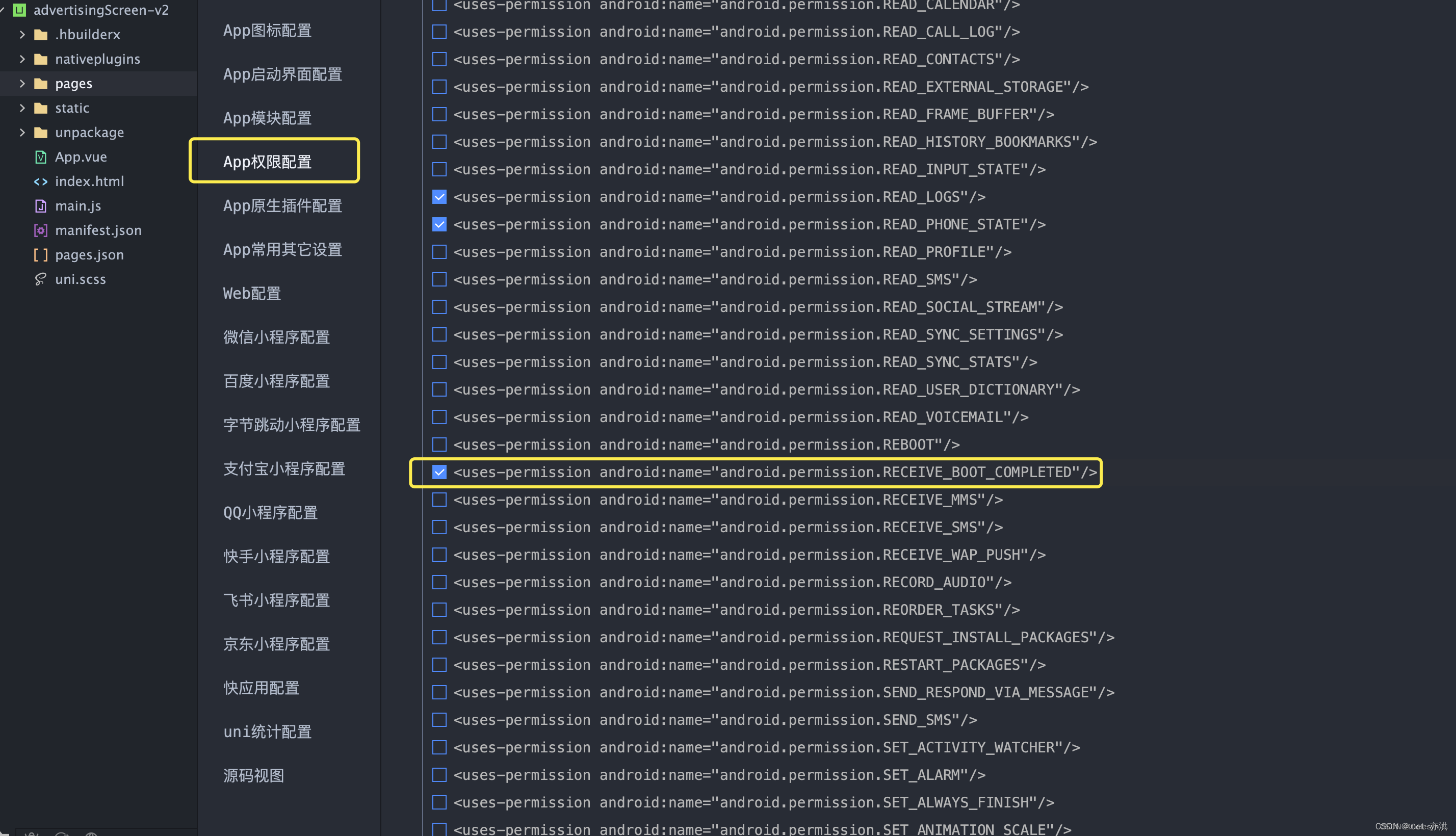
uniapp打包安卓后在安卓屏上实现开机自启动
实现开机自启动(使用插件) 打开插件地址安卓开机自启动 Fvv-AutoStart - DCloud 插件市场 使用方法 选择你要开启自启动的项目 在项目的manifest.json中app-plus下写入以下代码 注意需要替换 android_package_name 为自己的,不然无法进行安卓apk打包 "nativePlugins&q…...

浅谈KNX总线智能照明控制系统在北京南站房中的应用
安科瑞 华楠 摘要:本文简要介绍了i-bus EIB/KNX智能建筑控制系统的基本原理及在北京南站房中的成功应用。阐述了这一系统强大的系统功能、灵活的控制方式节能效果。 关键词:i-bus智能建筑控制;控制系统;节能 1、工程概况 北京新…...

深入了解Java的核心库
掌握Java的核心库是成为一名优秀的Java开发者的关键。Java提供了丰富的核心库和API,包括集合框架、输入输出、多线程、异常处理等等。熟悉并掌握这些库的使用,可以提高编程效率和代码质量。在本文中,我们将深入讨论Java的核心库,并…...
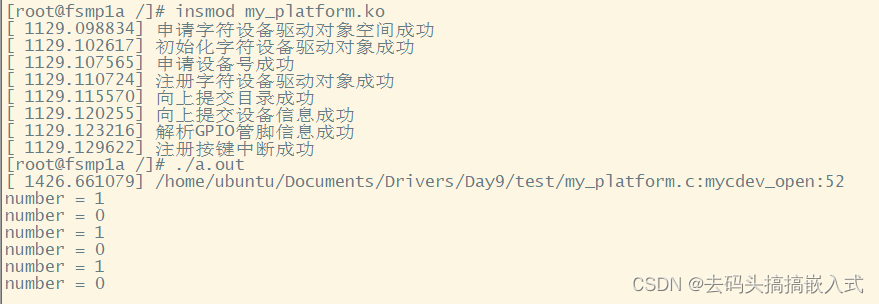
嵌入式:驱动开发 Day9
作业:通过platform总线驱动实现 a.应用程序通过阻塞的io模型来读取number变量的值 b.number是内核驱动中的一个变量 c.number的值随着按键按下而改变(按键中断) 例如number0 按下按键number1 ,再次按下按键number0 d.在按下按键的时候需要同时…...
(二)TensorRT-LLM | 模型导出(v0.20.0rc3)
0. 概述 上一节 对安装和使用有个基本介绍。根据这个 issue 的描述,后续 TensorRT-LLM 团队可能更专注于更新和维护 pytorch backend。但 tensorrt backend 作为先前一直开发的工作,其中包含了大量可以学习的地方。本文主要看看它导出模型的部分&#x…...
微信小程序 - 手机震动
一、界面 <button type"primary" bindtap"shortVibrate">短震动</button> <button type"primary" bindtap"longVibrate">长震动</button> 二、js逻辑代码 注:文档 https://developers.weixin.qq…...
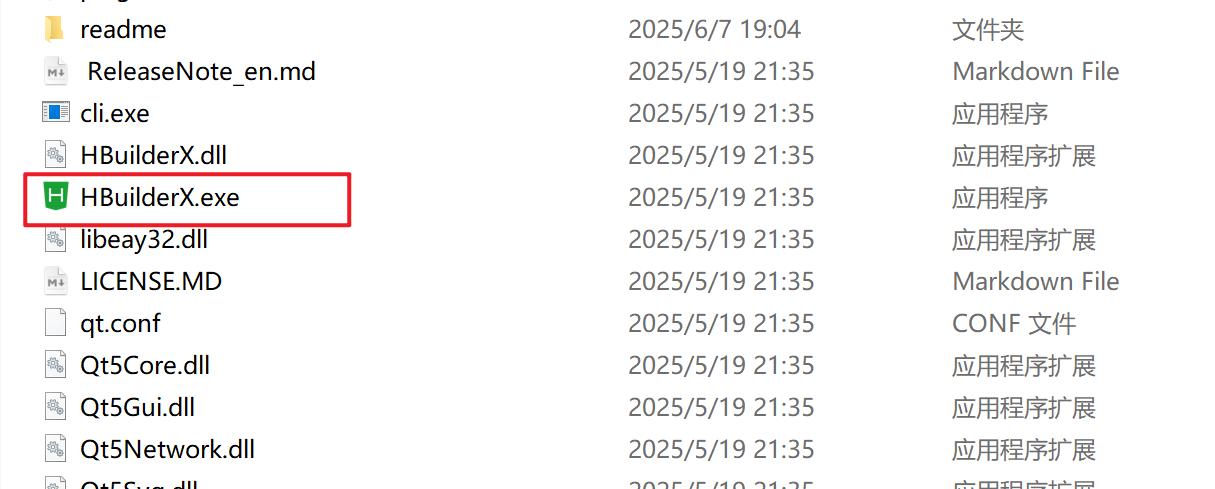
HBuilderX安装(uni-app和小程序开发)
下载HBuilderX 访问官方网站:https://www.dcloud.io/hbuilderx.html 根据您的操作系统选择合适版本: Windows版(推荐下载标准版) Windows系统安装步骤 运行安装程序: 双击下载的.exe安装文件 如果出现安全提示&…...

linux 下常用变更-8
1、删除普通用户 查询用户初始UID和GIDls -l /home/ ###家目录中查看UID cat /etc/group ###此文件查看GID删除用户1.编辑文件 /etc/passwd 找到对应的行,YW343:x:0:0::/home/YW343:/bin/bash 2.将标红的位置修改为用户对应初始UID和GID: YW3…...

视觉slam十四讲实践部分记录——ch2、ch3
ch2 一、使用g++编译.cpp为可执行文件并运行(P30) g++ helloSLAM.cpp ./a.out运行 二、使用cmake编译 mkdir build cd build cmake .. makeCMakeCache.txt 文件仍然指向旧的目录。这表明在源代码目录中可能还存在旧的 CMakeCache.txt 文件,或者在构建过程中仍然引用了旧的路…...

提升移动端网页调试效率:WebDebugX 与常见工具组合实践
在日常移动端开发中,网页调试始终是一个高频但又极具挑战的环节。尤其在面对 iOS 与 Android 的混合技术栈、各种设备差异化行为时,开发者迫切需要一套高效、可靠且跨平台的调试方案。过去,我们或多或少使用过 Chrome DevTools、Remote Debug…...
)
LLaMA-Factory 微调 Qwen2-VL 进行人脸情感识别(二)
在上一篇文章中,我们详细介绍了如何使用LLaMA-Factory框架对Qwen2-VL大模型进行微调,以实现人脸情感识别的功能。本篇文章将聚焦于微调完成后,如何调用这个模型进行人脸情感识别的具体代码实现,包括详细的步骤和注释。 模型调用步骤 环境准备:确保安装了必要的Python库。…...
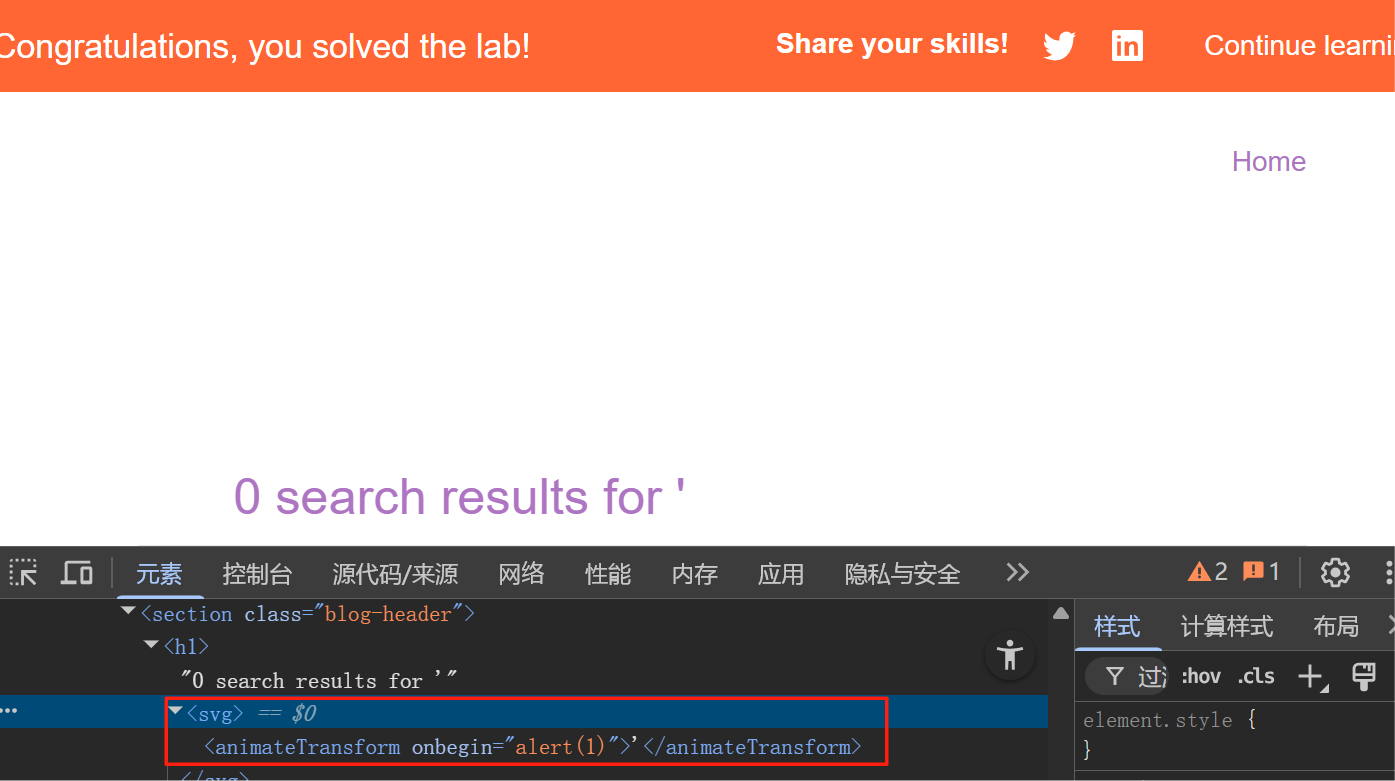
渗透实战PortSwigger Labs指南:自定义标签XSS和SVG XSS利用
阻止除自定义标签之外的所有标签 先输入一些标签测试,说是全部标签都被禁了 除了自定义的 自定义<my-tag onmouseoveralert(xss)> <my-tag idx onfocusalert(document.cookie) tabindex1> onfocus 当元素获得焦点时(如通过点击或键盘导航&…...

StarRocks 全面向量化执行引擎深度解析
StarRocks 全面向量化执行引擎深度解析 StarRocks 的向量化执行引擎是其高性能的核心设计,相比传统行式处理引擎(如MySQL),性能可提升 5-10倍。以下是分层拆解: 1. 向量化 vs 传统行式处理 维度行式处理向量化处理数…...

P10909 [蓝桥杯 2024 国 B] 立定跳远
# P10909 [蓝桥杯 2024 国 B] 立定跳远 ## 题目描述 在运动会上,小明从数轴的原点开始向正方向立定跳远。项目设置了 $n$ 个检查点 $a_1, a_2, \cdots , a_n$ 且 $a_i \ge a_{i−1} > 0$。小明必须先后跳跃到每个检查点上且只能跳跃到检查点上。同时࿰…...