车道线分割检测
利用opencv,使用边缘检测、全局变化梯度阈值过滤、算子角度过滤、HLS阈值过滤的方法进行车道线分割检测,综合多种阈值过滤进行检测提高检测精度。
1.利用cv2.Sobel()计算图像梯度(边缘检测)
import cv2
import numpy as np
import matplotlib.pyplot as plt
import ossrc = np.float32([[200, 720], [1100, 720], [595, 450], [685, 450]]) #src 输入图像
dst = np.float32([[300, 720], [980, 720], [300, 0], [980, 0]]) #dst 输出图像
m_inv = cv2.getPerspectiveTransform(dst, src)
m = cv2.getPerspectiveTransform(src, dst)# 利用cv2.Sobel()计算图像梯度(边缘检测)
def abs_sobel_threshold(img, orient='x', thresh_min=40, thresh_max=255):###利用X,y方向上sobel,二值化图像######gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)if orient == 'x':abs_sobel = np.absolute(cv2.Sobel(gray, cv2.CV_64F, 1, 0))if orient == 'y':########参考求x方向的sobel算子,计算y方向上sobel算子####################填空1 (1行代码)########################abs_sobel = np.absolute(cv2.Sobel(gray, cv2.CV_64F, 0, 1))#############填空1 (1行代码)########################scaled_sobel = np.uint8(255 * abs_sobel / np.max(abs_sobel))binary_output = np.zeros_like(scaled_sobel)#############二值图像,大于最小阈值并且小于最大阈值的区间置为255, 其余为0,可通过修改最大最小值查看差异####################填空2(1行代码)########################binary_output[(scaled_sobel >= thresh_min) & (scaled_sobel <= thresh_max)] = 255#############填空2 (1行代码)########################return binary_output
使用检测纵向边缘(x方向的梯度)
path = r"d:\Users\WYN\Desktop\temp\week1HomeWork\testImage"
path_list = os.listdir(path)
plt.figure(figsize=(16, 9))
for i in range(len(path_list)):path_now = "\\".join([str(path), str(path_list[i])])img = cv2.imread(path_now)img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)plt.subplot(2, 3, i + 1)plt.imshow(abs_sobel_threshold(img, orient='x', thresh_min=40, thresh_max=255))plt.xticks([])plt.yticks([])plt.subplots_adjust(wspace=0, hspace=0)
plt.show()使用检测纵向边缘(y方向的梯度)
# 检测纵向边缘(y方向的梯度)
plt.figure(figsize=(16, 9))
for i in range(len(path_list)):path_now = "\\".join([str(path), str(path_list[i])])img = cv2.imread(path_now)img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)plt.subplot(2, 3, i + 1)plt.imshow(abs_sobel_threshold(img, orient='y', thresh_min=40, thresh_max=255))plt.xticks([])plt.yticks([])plt.subplots_adjust(wspace=0, hspace=0)
plt.show()2.使用全局的变化梯度来进行阈值过滤
def mag_threshold(img, sobel_kernel=3, mag_threshold=(50, 255)):gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)sobelx = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=sobel_kernel)sobely = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=sobel_kernel)########根据x方向的sobel算子和y方向上sobel算子,计算梯度,公式为sqrt(x^2 + y ^2)####################填空3 (1行代码)########################gradmag = np.sqrt(sobelx ** 2 + sobely ** 2)#############填空3 (1行代码)########################scale_factor = np.max(gradmag) / 255gradmag = (gradmag / scale_factor).astype(np.uint8)binary_out = np.zeros_like(gradmag)########转换为二值图,最大最小值可调,kernel_size也可以调整看看差异####################填空4 (1行代码)########################binary_out[(gradmag >= mag_threshold[0]) & (gradmag <= mag_threshold[1])] = 255#############填空4 (1行代码)########################return binary_out
通过全局阈值过滤来检测车道线
path = r"d:\Users\WYN\Desktop\temp\week1HomeWork\testImage"
path_list = os.listdir(path)
plt.figure(figsize=(16, 9))
plt.figure(1)
for i in range(len(path_list)):path_now = "\\".join([str(path), str(path_list[i])])img = cv2.imread(path_now)img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)plt.subplot(2, 3, i + 1)plt.imshow(mag_threshold(img, sobel_kernel=3, mag_threshold=(50, 255)))plt.xticks([])plt.yticks([])plt.subplots_adjust(wspace=0, hspace=0)
plt.show()
3.通过算子角度来进行阈值过滤
def dir_threshold(img, sobel_kernel=5, thresh=(0.7, 1.3)):gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)sobelx = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=sobel_kernel)sobely = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=sobel_kernel)########根据x方向的sobel算子和y方向上sobel算子,计算角度,公式为arctan(y/x),将倾斜角度过大的过滤掉####################填空5 (1行代码)########################absgraddir = np.arctan(sobely / sobelx)#############填空5 (1行代码)########################binary_output = np.zeros_like(absgraddir)########转换为二值图,最大最小值可调,kernel_size也可以调整看看差异####################填空6 (1行代码)########################binary_output[((absgraddir >= thresh[0]) & (absgraddir <= thresh[1]))] = 255#############填空6 (1行代码)########################return binary_output
通过全局阈值过滤来检测车道线
path = r"d:\Users\WYN\Desktop\temp\week1HomeWork\testImage"
path_list = os.listdir(path)
plt.figure(figsize=(16, 9))
plt.figure(1)
for i in range(len(path_list)):path_now = "\\".join([str(path), str(path_list[i])])img = cv2.imread(path_now)img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)plt.subplot(2, 3, i + 1)plt.imshow(dir_threshold(img, sobel_kernel=5, thresh=(np.pi/4, np.pi/3)))plt.xticks([])plt.yticks([])plt.subplots_adjust(wspace=0, hspace=0)
plt.show()
4.使用HLS进行阈值过滤
def hls_thresh(img, thresh=(100, 255)):hls = cv2.cvtColor(img, cv2.COLOR_RGB2HLS)########分离出s通道s_channel####################填空7 (1行代码)########################_, _, s_channel = cv2.split(hls)#############填空7 (1行代码)########################binary_output = np.zeros_like(s_channel)########转换为二值图,最大最小值可调##################################填空8 (1行代码)########################binary_output[(s_channel > thresh[0]) & (s_channel < thresh[1])] = 255#############填空8 (1行代码)########################return binary_output
5.综合多种阈值过滤方法
def combined_threshold(img):abs_bin = abs_sobel_threshold(img, orient='x', thresh_min=50, thresh_max=255)mag_bin = mag_threshold(img, sobel_kernel=3, mag_threshold=(50, 255))dir_bin = dir_threshold(img, sobel_kernel=15, thresh=(0.7, 1.3))hls_bin = hls_thresh(img, thresh=(170, 255))combined = np.zeros_like(dir_bin)#############组合四个阈值结果,判定车道线,###################例如(abs_bin == 255 | ((mag_bin == 255) & (dir_bin == 255))) | hls_bin == 25)###########可以尝试不同的组合###################################填空9(1行代码)######################### combined[(abs_bin == 255 | ((mag_bin == 255) & (dir_bin == 255))) | hls_bin == 255] = 255combined[(abs_bin == 255) & (mag_bin == 255) & (dir_bin == 255) | (hls_bin == 255)] = 255#############填空9 (1行代码)########################return combined, abs_bin, mag_bin, dir_bin, hls_bin
6.滑动窗口扫描
def line_fit_and_draw_line(binary_warped):# "查找拟合直线"# 对图像对下半部分查找直方图#############填空10(1行代码)截取图像高度的下方1/2处########################histogram = np.sum(binary_warped[int(binary_warped.shape[0]//2):, :], axis=0)#############填空10(1行代码)截取图像高度的下方1/2处########################out_img = (np.dstack((binary_warped, binary_warped, binary_warped)) * 255).astype('uint8')#查找直方图中左右两侧对峰值midpoint = np.int(histogram.shape[0] / 2)#左侧从100到 midpoint的最大值,转换成图像坐标还要加上100哦~#############右侧从midpoint到图像宽度减100的最大值,转换成图像坐标还要加上midpoint哦~################也就是图像左右边缘100像素内不查找车道线###############################填空11(2行代码)查找左侧右侧最大值基本点########################leftx_base = np.argmax(histogram[100:midpoint])+100rightx_base = np.argmax(histogram[midpoint:binary_warped.shape[1]-100])+midpoint#############填空11(2行代码)查找左侧右侧最大值基本点##################################以下是关于滑动窗口查找车道线的代码#####################nwindows = 9 # 将窗口划分为9行window_height = np.int(binary_warped.shape[0] / nwindows)nonzero = binary_warped.nonzero()nonzeroy = np.array(nonzero[0]) # 非零元素所在行nonzerox = np.array(nonzero[1]) # 非零元素所在列leftx_current = leftx_baserightx_current = rightx_basemargin = 100minpix = 10left_lane_inds = []right_lane_inds = []for window in range(nwindows):win_y_low = binary_warped.shape[0] - (window + 1) * window_heightwin_y_high = binary_warped.shape[0] - window * window_heightwin_xleft_low = leftx_current - marginwin_xleft_high = leftx_current + marginwin_xright_low = rightx_current - marginwin_xright_high = rightx_current + margingood_left_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) & (nonzerox > win_xleft_low) & (nonzerox < win_xleft_high)).nonzero()[0]good_right_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) & (nonzerox >= win_xright_low) & (nonzerox < win_xright_high)).nonzero()[0]left_lane_inds.append(good_left_inds)right_lane_inds.append(good_right_inds)if len(good_left_inds) > minpix:leftx_current = np.int(np.mean(nonzerox[good_left_inds]))if len(good_right_inds) > minpix:rightx_current = np.int(np.mean(nonzerox[good_right_inds]))left_lane_inds = np.concatenate(left_lane_inds)right_lane_inds = np.concatenate(right_lane_inds)leftx = nonzerox[left_lane_inds]lefty = nonzeroy[left_lane_inds]rightx = nonzerox[right_lane_inds]righty = nonzeroy[right_lane_inds]##########以上是关于滑动窗口查找车道线的代码######################将左侧,右侧车道线3次拟合,用函数np.polyfit#######################填空12(2行代码)左侧、右侧车道线拟合#######################para_l = np.polyfit(lefty, leftx, 3) #得到曲线参数para_r = np.polyfit(righty, rightx, 3)#############填空12(2行代码)左侧、右侧车道线拟合#######################################在图上画出拟合的线########################ploty = np.linspace(0, undist.shape[0]-1, undist.shape[0])#########对y进行拟合,x = a * y ^ 2 + b * y + C#############填空13(2行代码)左侧、右侧车道线方程坐标#######################left_fitx = para_l[0] * ploty**3 + para_l[1] * ploty**2 + para_l[2] * ploty + para_l[3]right_fitx = para_r[0] * ploty**3 + para_r[1] * ploty**2 + para_r[2] * ploty + para_r[3]#############填空13(2行代码)左侧、右侧车道线方程坐标#############################生成一张黑图,做mask,将车道线区域标注出来##########color_warp = np.zeros((720, 1280, 3), dtype='uint8')pts_left = np.array([np.transpose(np.vstack([left_fitx, ploty]))])pts_right = np.array([np.flipud(np.transpose(np.vstack([right_fitx, ploty])))])pts = np.hstack((pts_left, pts_right))# 在透射变换后的图上画出车道线cv2.fillPoly(color_warp, np.int_([pts]), (0, 255, 0))# 将画出的车道线的图,逆变换到原来的图上,将color_warp逆变换为newwarp#############填空14(1行代码)#######################newwarp = cv2.warpPerspective(color_warp, m_inv, imgOut_size, flags=cv2.INTER_LINEAR)#############填空14(1行代码)######################## 将原来的图和标注好车道线的图叠加,用cv2.addWeighted,可画成半透明,最终图为result#############填空15(1行代码)#######################result = cv2.addWeighted(img, 0.5, newwarp, 0.5, 0)#############填空15(1行代码)#######################plt.figure(figsize = (30, 30))plt.title('lane')plt.subplot(1, 1, 1)plt.imshow(result)plt.axis('off')
7.图像显示
img = cv2.imread("./testImage/test6.jpg")
out1 = mag_threshold(img)
out2 = abs_sobel_threshold(img)
out3 = dir_threshold(img)
out4 = hls_thresh(img)
imgOut, abs_bin, mab_bin, dir_bin, hls_bin = combined_threshold(img)
plt.figure(figsize = (30, 30))
plt.title('calibration')
plt.subplot(1, 5, 1)
plt.imshow(out1)
plt.title("mag_threshold")
plt.subplot(1, 5, 2)
plt.imshow(out2)
plt.title("abs_sobel_threshold")
plt.subplot(1, 5, 3)
plt.imshow(out3)
plt.title("dir_threshold")
plt.subplot(1, 5, 4)
plt.imshow(out4)
plt.title("hls_thresh")
plt.subplot(1, 5, 5)
plt.imshow(imgOut)
plt.title("combined_threshold")
plt.axis('off')
imgOut_size = (imgOut.shape[1], imgOut.shape[0])
binary_warped = cv2.warpPerspective(imgOut, m, imgOut_size, flags=cv2.INTER_LINEAR)
undist = cv2.imread("./testImage/test6.jpg")
line_fit_and_draw_line(binary_warped)
plt.show()8.创建空白画布,并绘制指定点
import numpy as np
import cv2
import matplotlib.pyplot as plt
###在图中把点标记出来
plt.figure(figsize=(30, 30))
img = np.zeros((1000,1000,3),dtype=np.uint8)
point_list = [(200, 720), (1100, 720), (595, 450), (685, 450)] # src
point_list2 =[(300, 720), (980, 720), (300, 0), (980, 0)] # dst
for point in point_list:cv2.circle(img, point, 10, (255, 0, 0), 3)
for point in point_list2:cv2.circle(img, point, 10, (0, 0, 255), 3)
plt.imshow(img)
plt.show()
相关文章:

车道线分割检测
利用opencv,使用边缘检测、全局变化梯度阈值过滤、算子角度过滤、HLS阈值过滤的方法进行车道线分割检测,综合多种阈值过滤进行检测提高检测精度。 1.利用cv2.Sobel()计算图像梯度(边缘检测) import cv2 import numpy as np import matplotlib.pyplot a…...

树莓集团又一力作,打造天府蜂巢成都直播产业园样板工程
树莓集团再次推出惊艳之作,以打造成都天府蜂巢直播产业园为目标。该基地将充分展现成都直播产业园的巨大潜力与无限魅力,成为一个真正的产业园样板工程。 强强联手 打造未来 成都天府蜂巢直播产业园位于成都科学城兴隆湖高新技术服务产业园内࿰…...

ubuntu 软件包管理之二制作升级包
Deb 包(Debian 软件包)是一种用于在 Debian 及其衍生发行版(例如 Ubuntu)中分发和安装软件的标准包装格式。它们构成了 Debian Linux 发行版中的软件包管理系统的核心组成部分,旨在简化软件的分发、安装、更新和卸载流程。在本篇文章中,我们将深入探讨以下内容: Deb 包基…...
)
TCP/IP网络江湖——数据链路层的防御招式(数据链路层下篇:数据链路层的安全问题)
目录 引言 一、 数据链路层的隐私与保密 二、数据链路层的安全协议与加密...

ios项目安装hermes-engine太慢问题
问题说明 ios工程,在使用"pod install"安装依赖的时候,由于超时总是报错 $ pod install ... Installing hermes-engine (0.71.11)[!] Error installing hermes-engine [!] /usr/bin/curl -f -L -o /var/folders/4c/slcchpy55s53ysmz_1_q_gzw…...
构建个人云存储:本地电脑搭建SFTP服务器,开启公网访问,轻松共享与管理个人文件!
本地电脑搭建SFTP服务器,并实现公网访问 文章目录 本地电脑搭建SFTP服务器,并实现公网访问1. 搭建SFTP服务器1.1 下载 freesshd 服务器软件1.3 启动SFTP服务1.4 添加用户1.5 保存所有配置 2. 安装SFTP客户端FileZilla测试2.1 配置一个本地SFTP站点2.2 内…...

springboot 下载文件为excel数据,中文自定义单元格宽度
/**2 * Description:表格自适应宽度(中文支持)3 * Author: 4 * param sheet sheet5 * param columnLength 列数6 */7 private static void setSizeColumn(HSSFSheet sheet, int columnLength) {8 for (int columnNum 0; columnNum < …...

机器学习 面试/笔试题
1. 生成模型 VS 判别模型 生成模型: 由数据学得联合概率分布函数 P ( X , Y ) P(X,Y) P(X,Y),求出条件概率分布 P ( Y ∣ X ) P(Y|X) P(Y∣X)的预测模型。 朴素贝叶斯、隐马尔可夫模型、高斯混合模型、文档主题生成模型(LDA)、限制玻尔兹曼机…...

某企查ymg_ssr列表详情
js篇— 今天来看下某企查的列表详情–侵删 header发现这个参数 先断点一下 然后上一步 就到了这个地方 就开始扣一下这个js 三大段,先不解混淆了, 给a粘贴出来 ,去掉自执行 给结果稍微改一下 缺windows,开始补环境 直接上…...

使用YOLOv5的backbone网络识别图像天气 - P9
目录 环境步骤环境设置包引用声明一个全局的设备 数据准备收集数据集信息构建数据集在数据集中读取分类名称划分训练、测试数据集数据集划分批次 模型设计编写维持卷积前后图像大小不变的padding计算函数编写YOLOv5中使用的卷积模块编写YOLOv5中使用的Bottleneck模块编写YOLOv5…...

TikTok海外扩张:亚马逊的新对手崛起
随着社交媒体和电子商务的融合,TikTok正迅速崭露头角,成为亚马逊等传统电商巨头的潜在竞争对手。这一新兴平台的快速发展引发了广泛的关注,特别是在全球范围内。 在这篇文章中,我们将探讨TikTok海外扩张的战略,以及它…...
CSS详细基础(五)选择器的优先级
本节介绍选择器优先级,优先级决定了元素最终展示的样式~ 浏览器是通过判断CSS优先级,来决定到底哪些属性值是与元素最为相关的,从而作用到该元素上。CSS选择器的合理组成规则决定了优先级,我们也常常用选择器优先级来合理控制元素…...

LLM-TAP随笔——有监督微调【深度学习】【PyTorch】【LLM】
文章目录 5、 有监督微调5.1、提示学习&语境学习5.2、高效微调5.3、模型上下文窗口扩展5.4、指令数据构建5.5、开源指令数据集 5、 有监督微调 5.1、提示学习&语境学习 提示学习 完成预测的三个阶段:提示添加、答案搜索、答案映射 提示添加 “[X] 我感到…...

kafka伪集群部署,使用docker环境拷贝模式
线上启动容器的方式是复制容器的运行环境出来,然后进行运行脚本的形式 1:在home/kafka目录下创建如下目录 2:复制kafka1容器内的数据/bitnami/kafka/data,直接放在1992_data里面,同理,复制kafka2容器内的数据/bitnami/…...

工业交换机一般的价格是多少呢?
工业交换机是一种应用于工业领域的网络设备。它的性能和所有安全指标都比一般商业交换机更加稳定。所以,工业级交换机的价格相对于普通的交换机要稍稍昂贵一些。工业交换机一般的价格是多少呢?每个厂家的交换机价格是不是都一样呢? 首先&…...
QT使用前的知识
QT使用前的知识 常用的快捷键 源文件的内容解释 .pro文件的解释 头文件的解释 构建新的对象—组成对象树 槽函数 自定的信号和槽 槽函数的信号是一个重载函数时 电机按钮触发信号 调用无参数的信号 断开信号...

Unity制作旋转光束
Unity制作旋转光束 大家好,我是阿赵。 这是一个在很多游戏里面可能都看到过的效果,在传送门、魔法阵、角色等脚底下往上散发出一束拉丝形状的光,然后在不停的旋转。 这次来在Unity引擎里面做一下这种效果。 一、准备材料 需要准备的素材很简…...

考研王道强化阶段(二轮复习)“算法题”备考打卡表 记录
问题:做408真题_2010_42题,即王道书 2.2.3_大题_10 思路: 回头补 代码: int moveL(SqlList &L,SqlList &S,int p) {// 健壮性表达if( L.len 0 ){return 0;}// 调用另外一个顺序表存储pos前面的元素for( int i0;i<p;…...
UE4/5数字人MetaHuman通过已有动画进行修改
目录 通过已有动画修改动画 开始制作 创建一个关卡序列 将动画序列烘焙到控制绑定 打开我们自己创建的动画序列 之后便是烘焙出来 通过已有动画修改动画 首先架设我们已经有相关的MetaHuman的动画,但是这个动画因为是外部导入进来的,所以可能会出…...

在Mac M2本地注册GitLab runner
最近在搞公司的CI/CD,简单记录下部分过程 安装runner sudo curl --output /usr/local/bin/gitlab-runner "https://gitlab-runner-downloads.s3.amazonaws.com/latest/binaries/gitlab-runner-darwin-arm64" 创建runner 这个步骤需要在gitlab中进行&am…...

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明 如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看 说明:假设每台服务器已…...

Vue记事本应用实现教程
文章目录 1. 项目介绍2. 开发环境准备3. 设计应用界面4. 创建Vue实例和数据模型5. 实现记事本功能5.1 添加新记事项5.2 删除记事项5.3 清空所有记事 6. 添加样式7. 功能扩展:显示创建时间8. 功能扩展:记事项搜索9. 完整代码10. Vue知识点解析10.1 数据绑…...
【入坑系列】TiDB 强制索引在不同库下不生效问题
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...
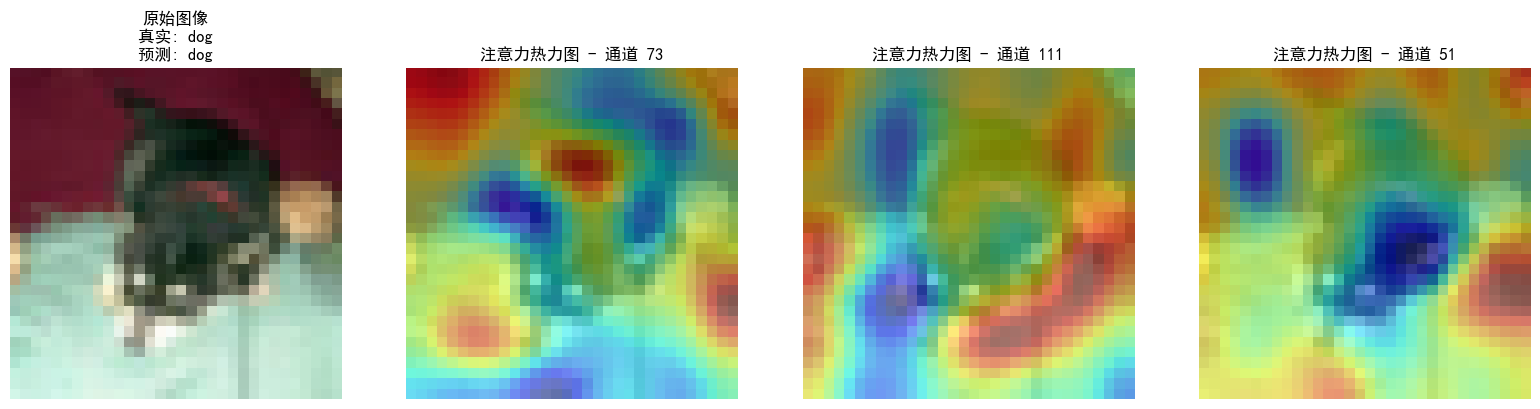
DAY 47
三、通道注意力 3.1 通道注意力的定义 # 新增:通道注意力模块(SE模块) class ChannelAttention(nn.Module):"""通道注意力模块(Squeeze-and-Excitation)"""def __init__(self, in_channels, reduction_rat…...
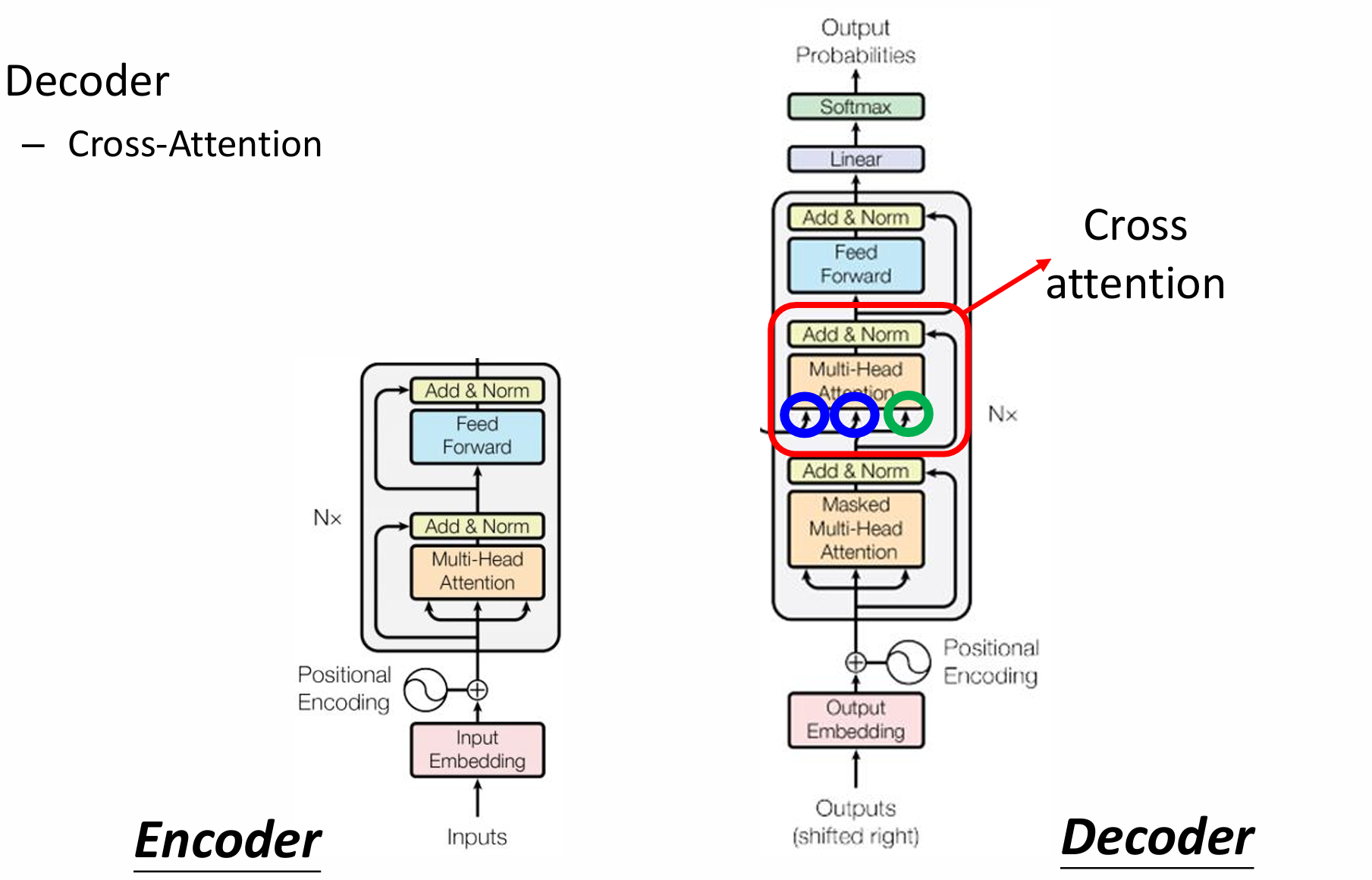
自然语言处理——Transformer
自然语言处理——Transformer 自注意力机制多头注意力机制Transformer 虽然循环神经网络可以对具有序列特性的数据非常有效,它能挖掘数据中的时序信息以及语义信息,但是它有一个很大的缺陷——很难并行化。 我们可以考虑用CNN来替代RNN,但是…...

06 Deep learning神经网络编程基础 激活函数 --吴恩达
深度学习激活函数详解 一、核心作用 引入非线性:使神经网络可学习复杂模式控制输出范围:如Sigmoid将输出限制在(0,1)梯度传递:影响反向传播的稳定性二、常见类型及数学表达 Sigmoid σ ( x ) = 1 1 +...

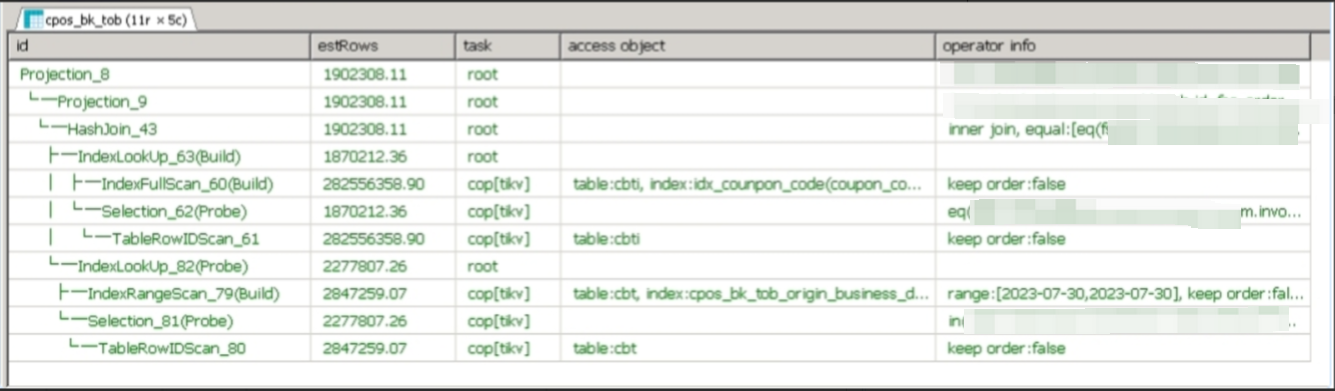
Mysql中select查询语句的执行过程
目录 1、介绍 1.1、组件介绍 1.2、Sql执行顺序 2、执行流程 2.1. 连接与认证 2.2. 查询缓存 2.3. 语法解析(Parser) 2.4、执行sql 1. 预处理(Preprocessor) 2. 查询优化器(Optimizer) 3. 执行器…...
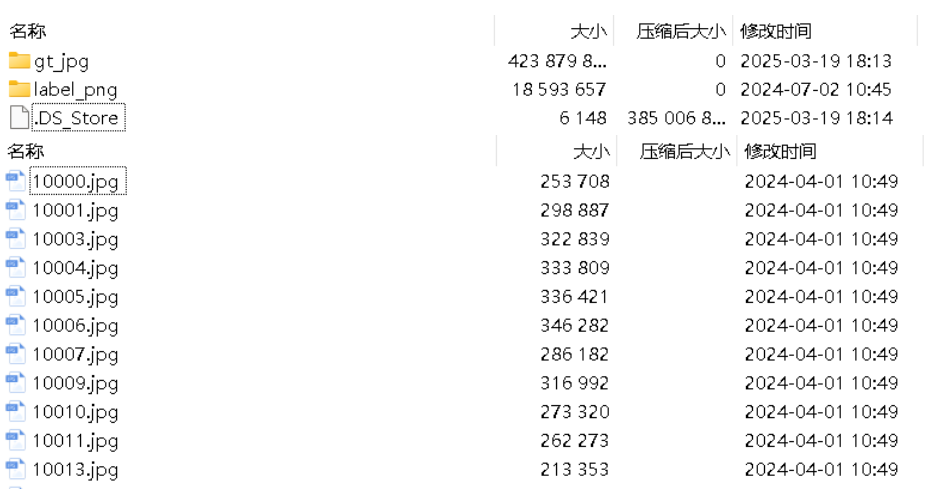
面向无人机海岸带生态系统监测的语义分割基准数据集
描述:海岸带生态系统的监测是维护生态平衡和可持续发展的重要任务。语义分割技术在遥感影像中的应用为海岸带生态系统的精准监测提供了有效手段。然而,目前该领域仍面临一个挑战,即缺乏公开的专门面向海岸带生态系统的语义分割基准数据集。受…...
深入浅出深度学习基础:从感知机到全连接神经网络的核心原理与应用
文章目录 前言一、感知机 (Perceptron)1.1 基础介绍1.1.1 感知机是什么?1.1.2 感知机的工作原理 1.2 感知机的简单应用:基本逻辑门1.2.1 逻辑与 (Logic AND)1.2.2 逻辑或 (Logic OR)1.2.3 逻辑与非 (Logic NAND) 1.3 感知机的实现1.3.1 简单实现 (基于阈…...
逻辑回归暴力训练预测金融欺诈
简述 「使用逻辑回归暴力预测金融欺诈,并不断增加特征维度持续测试」的做法,体现了一种逐步建模与迭代验证的实验思路,在金融欺诈检测中非常有价值,本文作为一篇回顾性记录了早年间公司给某行做反欺诈预测用到的技术和思路。百度…...