PSINS工具箱学习(一)下载安装初始化、SINS-GPS组合导航仿真、习惯约定与常用变量符号、数据导入转换、绘图显示
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
文章目录
- 一、前言
- 二、相关资源
- 三、下载安装初始化
- 1、下载PSINSyymmdd.rar工具箱文件
- 2、解压文件
- 3、初始化
- 4、启动工具箱导览
- 四、习惯约定与常用变量符号
- 1、PSINS全局变量结构体 glv
- 2、坐标系定义
- 3、姿态阵/姿态四元数/欧拉角 Cnb/qnb/att
- 4、IMU采样数据 imu
- 5、AVP导航参数 avp
- 6、误差参数
- 7、其它常用变量
- 1.角速率 wnie
- 2. 不可交换误差补偿 phim/dvbm
- 3.重力矢量 gn
- 4.有害加速度 gcc
- 5.仿真轨迹结构体 trj
- 6.指北方位捷联导航解算结构体 ins
- 7.导航地球相关计算结构体 eth
- 8.Kalman滤波结构体 kf
- 五、数据导入、转换
- 六、绘图显示
- 1、绘图辅助函数
- 2、传感器数据绘图
- 3、导航结果绘图
- 4、进度条函数
- 七、SINS/GPS组合导航仿真举例
- 1、生成仿真轨迹
- 2、纯惯导仿真
- 3、SINS-GPS仿真
一、前言
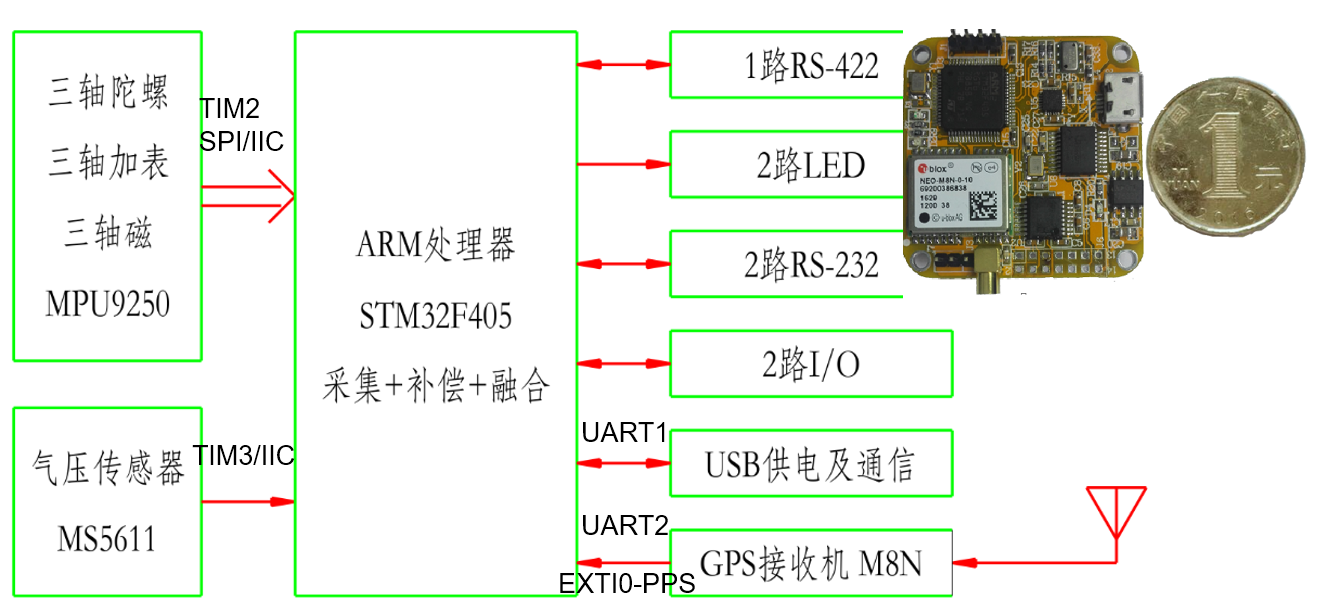
PSINS(Precise Strapdown Inertial Navigation System 高精度捷联惯导系统算法)工具箱由西北工业大学自动化学院惯性技术教研室严恭敏老师开发和维护。工具箱分为Matlab和C++两部分。主要应用于捷联惯导系统的数据处理和算法验证开发,它包括惯性传感器数据分析、惯组标定、初始对准、惯导AVP(姿态-速度-位置)更新解算、组合导航Kalman滤波等功能。C++部分采用VC6编写,可以用于嵌入式开发。如果你之前还没接触过PSINS工具箱,强烈建议先去看严老师的 视频讲解
下面再推荐一些已有的博客:
- 十八与她 的专栏 PSINS工具箱基本原理与应用
- 枯荣有常 的专栏 psins代码解析
- 路痴导航员 的 关于PSINS运动轨迹仿真模块的理解和思考 等
- waihekor 的 PSINS源码阅读—test_SINS_trj、PSINS源码test_SINS_DR解析 、PSINS C++代码移植与效果测试 等
- S1301060113 的 严恭敏老师PSINS工具箱解读——test_SINS_GPS_153、glvf 、imuadderr 等
二、相关资源
-
PSINS网站 可下载最新PSINS工具箱源码及课程PPT,导航数据。还有新浪博客、知乎 上有技术交流文章、推荐知乎,一直在更新,排版也好一些。
-
PSINS导航算法QQ群:46819593,人快满了,不知道还能不能进了。
-
bilibili课程视频:卡尔曼滤波与组合导航原理【西北工业大学 严恭敏】:共10讲,先讲Kalman滤波,后讲捷联惯导算法。
-
bilibili课程视频:PSINS导航工具箱入门与详解【西北工业大学 严恭敏】 :共4讲,对工具箱的功能、使用方式、原理做了很详细的讲解。
- 第一课:工具箱简介、下载与安装初始化、快速开始—SINS/GNSS组合导航仿真举例
- 第二课:习惯约定与常用变量符号、导入数据文件与数据提取转换、绘图显示、姿态阵/姿态四元数/欧拉角/等效旋转矢量之间的转换函数
- 第三课:运动轨迹与惯性器件信息生成仿真、惯性器件误差模拟与分析、不可交换(圆锥/划桨)误差补偿、捷联惯导更新算法、初始对准方法、卡尔曼滤波与SINS/GNSS组合导航、捷联惯导的系统级标定
- 第四课:C++导航库函数
-
PSINS开发板:bilibili介绍视频、淘宝链接、780元
三、下载安装初始化
1、下载PSINSyymmdd.rar工具箱文件
直接在PSINS网站 www.psins.org.cn 下载,yymmdd—“年年月月日日”表示版本信息,选一个最新版的下就行。我用的版本是psins230321。
2、解压文件
建议在D盘根目录,文件解压完之后不要改动任何文件夹名称,各子文件夹功能:
- base:核心算法、数据预处理及图形显示等库函数。
- data:用于工具箱提供的样本数据、生成中间数据、或用户输入输出存放数据;为了控制文件大小,很多数据没放在里面,PSINS网站上还有很多。
- demos:一系列演示和测试例子。
- dlg:可视化(对话框)应用例子。
- doc:工具箱介绍和使用说明等文档;除此以外每个matlab文档上面有一个
help也对用法做了介绍。 - gnss:仅试图用于SINS/GNSS紧组合中卫导信号处理,不太专业。
- mytest:建议用户修改、编写的测试和应用例子放在该文件夹下;如果更新的版本,把mytest复制出来就行,减小冲突。
- vc60:VC6.0工程文件夹,导航核心算法用C++编写,可移植于嵌入式应用:核心算法、数据预处理及图形显示等库函数;
3、初始化
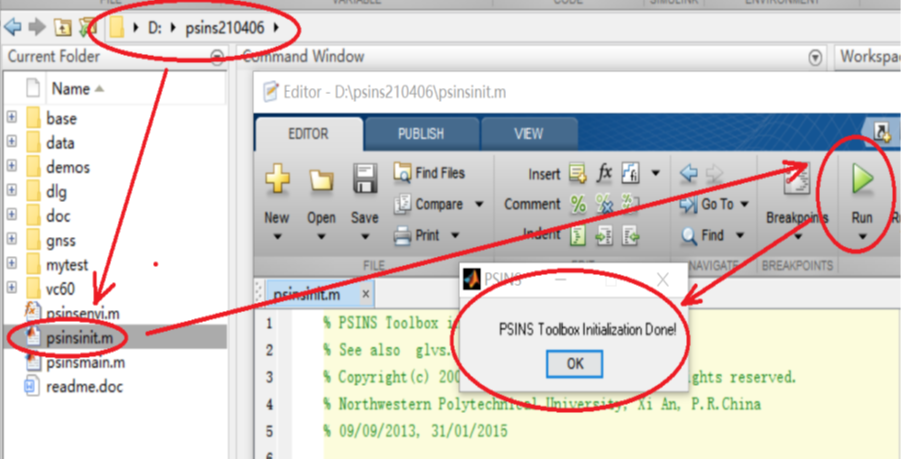
启动Matlab软件,打开PSINS根目录下的psinsinit.m文件,运行,即可完成工具箱的安装初始化。
- 初始化过程也就是将PSINSyymmdd及其所有子文件夹添加到Matlab的搜索路径下并保存路径设置;
- 初始化之后尽量不要改动PSINS文件夹位置,改动要重新初始化。
- 新版本的安装初始化会移除以往添加到 Matlab 的含“PSINS”字符的所有路径,减小冲突。
- 不要自己用
addpath添加路径,如果下多个版本,可能会冲突。
4、启动工具箱导览
打开PSINS根目录下的psinsmain.m文件,运行,启动“工具箱导览”主界面,点击相应按钮可感受工具箱的主要演示/测试例子;如果勾选了左上角的“查看m文件源码”,再点按钮就是阅览相应的程序源代码。

四、习惯约定与常用变量符号
- PSINS里的变量很多都是简写,这里给出一些常用的,看完这些再看代码会比较容易一些。
- 工具箱中所有的物理量在内部计算都使用标准单位,比如角度用 r a d rad rad、比力用 m / s 2 m/s^2 m/s2 等。只有在初始化输入参数时才会用习惯单位。
- 有角标的符号书写一般遵从规律是从左到右从上到下。
- 把我代码里的注释复制自己的代码里,以后看着就方便了。
1、PSINS全局变量结构体 glv
它是 global variable 的缩写,内容可以在 glvf 函数里看,运行脚本 glvs.m 即可初始化全局变量glv,一般在主文件都会先执行 glvs 初始化全局变量。
clear global glv
global glv
glv = glvf;
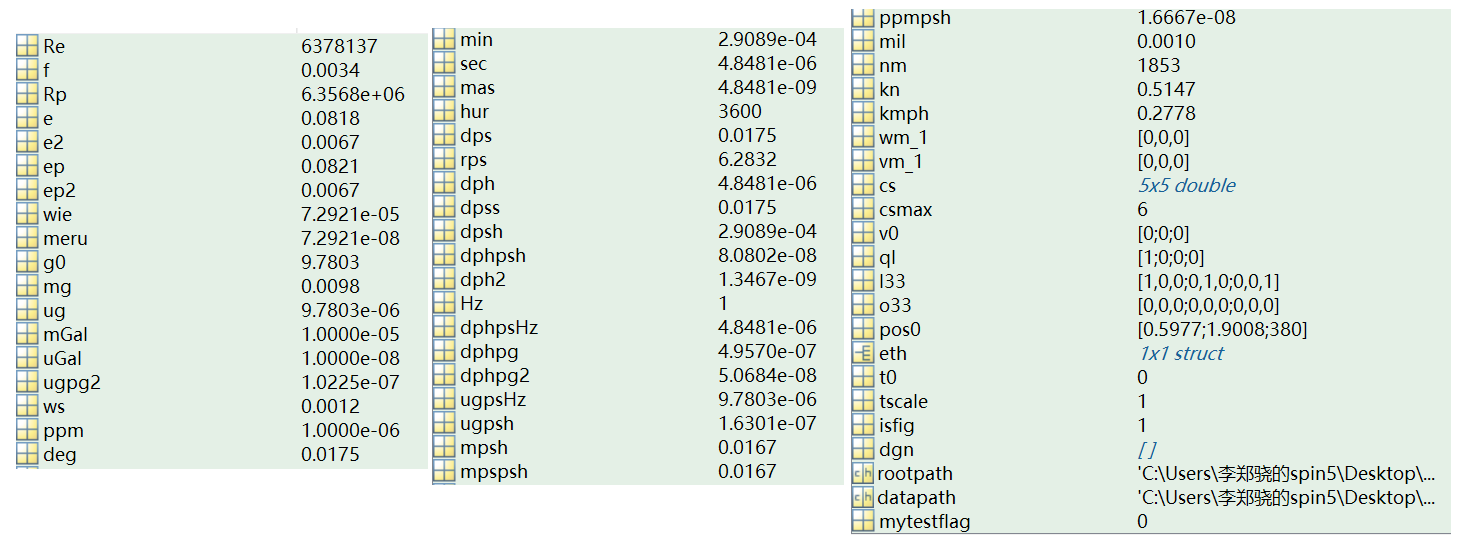
glvf函数有三个参数,Re是地球半径, f是地球扁率, wie是地球自转角速率,如果不传参数,默认WGS-84坐标系。
参考:严恭敏老师PSINS工具箱解读——glvf
function glv1 = glvf(Re, f, wie)
global glv% 三个参数,Re是地球半径, f是地球扁率, wie是地球自转角速率,% 如果不传参数,默认使用WGS-84坐标系 if ~exist('Re', 'var'), Re = []; endif ~exist('f', 'var'), f = []; endif ~exist('wie', 'var'), wie = []; endif isempty(Re), Re = 6378137; end if isempty(f), f = 1/298.257; endif isempty(wie), wie = 7.2921151467e-5; end glv.Re = Re; % the Earth's semi-major axis 长半轴glv.f = f; % flattening 扁率glv.Rp = (1-glv.f)*glv.Re; % semi-minor axis 短半轴glv.e = sqrt(2*glv.f-glv.f^2); glv.e2 = glv.e^2; % 1st eccentricity 第一偏心率glv.ep = sqrt(glv.Re^2-glv.Rp^2)/glv.Rp; glv.ep2 = glv.ep^2; % 2nd eccentricity 第二偏心率glv.wie = wie; % the Earth's angular rate 自转角速率glv.meru = glv.wie/1000; % milli earth rate unit 自转角速率的千分之一% 地球重力,g0:G、mg:毫G、ug:微G glv.g0 = 9.7803267714; % gravitational force 重力glv.mg = 1.0e-3*glv.g0; % milli gglv.ug = 1.0e-6*glv.g0; % micro gglv.mGal = 1.0e-3*0.01; % milli Gal = 1cm/s^2 ~= 1.0E-6*g0glv.uGal = glv.mGal/1000; % micro Galglv.ugpg2 = glv.ug/glv.g0^2; % ug/g^2glv.ws = 1/sqrt(glv.Re/glv.g0); % Schuler frequency 舒勒频率glv.ppm = 1.0e-6; % parts per million 百万分之一glv.deg = pi/180; % arcdeg 单位:弧度glv.min = glv.deg/60; % arcmin 单位:弧分glv.sec = glv.min/60; % arcsec 单位:弧秒glv.mas = glv.sec/1000; % milli arcsec 单位:弧毫秒glv.hur = 3600; % time hour (1hur=3600second) 一小时% 陀螺仪glv.dps = pi/180/1; % arcdeg / second 度每秒glv.rps = 360*glv.dps; % revolutions per second 度每分钟glv.dph = glv.deg/glv.hur; % arcdeg / hour 度每小时glv.dpss = glv.deg/sqrt(1); % arcdeg / sqrt(second)glv.dpsh = glv.deg/sqrt(glv.hur); % arcdeg / sqrt(hour)glv.dphpsh = glv.dph/sqrt(glv.hur); % (arcdeg/hour) / sqrt(hour)glv.dph2 = glv.dph/glv.hur; % (arcdeg/hour) / hourglv.Hz = 1/1; % Hertzglv.dphpsHz = glv.dph/glv.Hz; % (arcdeg/hour) / sqrt(Hz) glv.dphpg = glv.dph/glv.g0; % (arcdeg/hour) / gglv.dphpg2 = glv.dphpg/glv.g0; % (arcdeg/hour) / g^2glv.ugpsHz = glv.ug/sqrt(glv.Hz); % ug / sqrt(Hz)glv.ugpsh = glv.ug/sqrt(glv.hur); % ug / sqrt(hour)glv.mpsh = 1/sqrt(glv.hur); % m / sqrt(hour)glv.mpspsh = 1/1/sqrt(glv.hur); % (m/s) / sqrt(hour), 1*mpspsh~=1700*ugpsHzglv.ppmpsh = glv.ppm/sqrt(glv.hur); % ppm / sqrt(hour)glv.mil = 2*pi/6000; % milglv.nm = 1853; % nautical mile 单位:海里glv.kn = glv.nm/glv.hur; % knot 单位:节-海洋中的速度单位glv.kmph = 1000/glv.hur; % km/hour%%glv.wm_1 = [0,0,0]; % the init of previous gyro 陀螺仪角度增量glv.vm_1 = [0,0,0]; % the init of previous acc sample 加速度计速度增量glv.cs = [ % coning & sculling compensation coefficients 锥度和双桨补偿系数[2, 0, 0, 0, 0 ]/3[9, 27, 0, 0, 0 ]/20[54, 92, 214, 0, 0 ]/105[250, 525, 650, 1375, 0 ]/504 [2315, 4558, 7296, 7834, 15797]/4620 ];glv.csmax = size(glv.cs,1)+1; % max subsample number 最大子样本数glv.v0 = [0;0;0]; % 3x1 zero-vector 3x1 零向量glv.qI = [1;0;0;0]; % identity quaternion 特征四元数glv.I33 = eye(3); glv.o33 = zeros(3); % identity & zero 3x3 matricesglv.pos0 = [34.246048*glv.deg; 108.909664*glv.deg; 380]; % position of INS Lab@NWPUglv.eth = []; glv.eth = earth(glv.pos0); %利用earth函数计算地球的相关参数glv.t0 = 0;glv.tscale = 1; % =1 for second, =60 for minute, =3600 for hour, =24*3600 for dayglv.isfig = 1;glv.dgn = [];%%[glv.rootpath, glv.datapath, glv.mytestflag] = psinsenvi;glv1 = glv; % 返回全局变量的结构体
2、坐标系定义
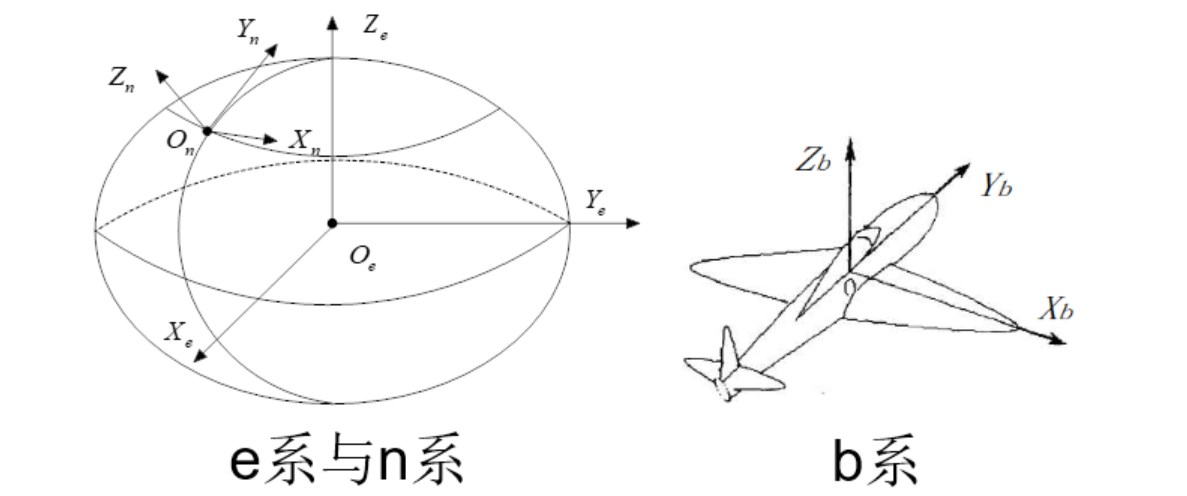
- 惯性坐标系(i):陀螺仪和加速度计测量值的基准
- 地球坐标系(e):即ECEF坐标系
- 导航坐标系(n):东E-北N-天U
- 载体坐标系(b):右R-前F-上U
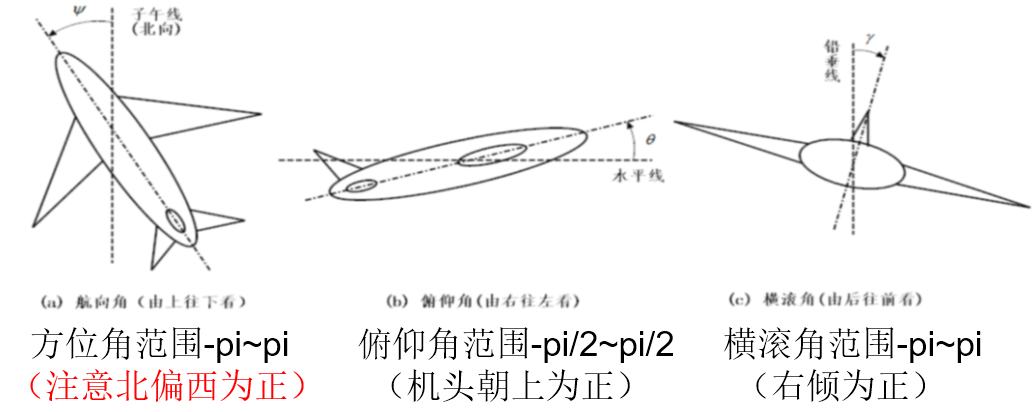
3、姿态阵/姿态四元数/欧拉角 Cnb/qnb/att
- 姿态阵:
Cnb,表示从 b 系到 n 系的坐标变换矩阵。对应姿态四元数写为qnb。 - 欧拉角:
att=[俯仰pitch; 横滚roll; 方位yaw]。没有按照转到顺序来写,如果按转到顺序,东北天坐标系转到右前下坐标系,常见先转方位角、然后俯仰角、横滚角
4、IMU采样数据 imu
imu=[wm; vm; t] 其中:
wm为陀螺三轴角增量,是角速率积分,单位rad,1~3列,右前上。vm为加表三轴速度增量,是比力积分,单位m/s,4~6列,右前上。100Hz静止采样,第6列的数据是0.098左右,如果不是这种特征就有问题,IMU可以需要坐标转换。- PSINS惯导算法里使用的陀螺和加表输入都是增量信息,如果用户数据中是角速度/比力信息,则简单地乘以采样间隔
ts处理即可。 - 时标通常放在最后一列,imu一般都是等间隔采样,有些不等间隔的可能是因为时钟的抖动,可以平均转换成等间隔。
5、AVP导航参数 avp
avp=[att; vn; pos; t]。其中:
- 姿态:
att=[俯仰pitch; 横滚roll; 方位yaw];单位rad - 速度:
vn=[东速vE; 北速vN; 天速vU]; - 位置:
pos=[纬度lat; 经度lon; 高度hgt];单位rad
6、误差参数
-
失准角误差
phi=[phiE;phiN;phiU];速度误差dvn;位置误差dpos=[dlat;dlon;dhgt];(d一般指误差 δ \delta δ) -
陀螺漂移
eb=[ebx;eby;ebz];加表零偏db=[dbx;dby;dbz];web为陀螺角度随机游走/角速率白噪声;wdb为加计速度随机游走/比力白噪声;(b表示b系投影、wb表示白噪声) -
陀螺标定误差矩阵
dKg;加表标定误差矩阵dKa;(d表示陀螺、a表示加速度计) -
IMU误差结构体
imuerr,包含较多成员,可见imuerrset函数。参考:严恭敏老师PSINS工具箱解读——imuerrset
function imuerr = imuerrset(eb, db, web, wdb, sqrtR0G, TauG, sqrtR0A, TauA, dKGii, dKAii, dKGij, dKAij, KA2, rxyz, dtGA)
% SIMU errors setting, including gyro & acc bias, noise and installation errors, etc.
%
% Prototype: imuerr = imuerrset(eb, db, web, wdb, sqrtR0G, TauG, sqrtR0A, TauA, dKGii, dKAii, dKGij, dKAij, KA2, rxyz, dtGA)
% Inputs: including information as follows 陀螺常值零偏,单位:度/小时
% eb - gyro constant bias (deg/h) 加速度计常值零偏,单位:微g
% db - acc constant bias (ug) 角度随机游走,单位:度/根号小时
% web - angular random walk (deg/sqrt(h)) 速度随机游走,单位:微g/根号赫兹
% wdb - velocity random walk (ug/sqrt(Hz)) 陀螺相关零偏,单位:度/小时
% sqrtR0G,TauG - gyro correlated bias, sqrtR0G in deg/h and TauG in s
% sqrtR0A,TauA - acc correlated bias, sqrtR0A in ug and TauA in s
% dKGii - gyro scale factor error (ppm) 陀螺尺度因子误差,单位:百万分之一
% dKAii - acc scale factor error (ppm) 加速度计尺度因子误差,单位:百万分之一
% dKGij - gyro installation error (arcsec) 陀螺安装误差角,单位:弧秒
% dKAij - acc installation error (arcsec) 加速度计安装误差角,单位:弧秒
% KA2 - acc quadratic coefficient (ug/g^2) 加速度计二次系数,单位:微g/g平方
% where,
% |dKGii(1) dKGij(4) dKGij(5)| |dKAii(1) 0 0 | 陀螺和加速度计的标定刻度误差
% dKg = |dKGij(1) dKGii(2) dKGij(6)| , dKa = |dKAij(1) dKAii(2) 0 |
% |dKGij(2) dKGij(3) dKGii(3)| |dKAij(2) dKAij(3) dKAii(3)|
% rxyz - acc inner-lever-arm, =[rx;ry;rz] (cm) 加速度计内杠杆臂,单位:厘米
% dtGA - time-asynchrony between gyro & acc, dtGA=Tacc_later-Tgyro_early>0 (ms) 陀螺和加速度计采样时刻未对准误差,单位:毫秒
% Output: imuerr - SIMU error structure array
%
% Example: 惯性级惯导的经典误差设置
% For inertial grade SIMU, typical errors are:
% eb=0.01dph, db=50ug, web=0.001dpsh, wdb=10ugpsHz
% scale factor error=10ppm, askew installation error=10arcsec
% sqrtR0G=0.001dph, taug=1000s, sqrtR0A=10ug, taug=1000s
% then call this funcion by
% imuerr = imuerrset(0.01,100,0.001,10, 0.001,1000,10,1000, 10,10,10,10, 10, 10, 10);
%
% See also imuadderr, gabias, avperrset, insinit, kfinit.% Copyright(c) 2009-2014, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 11/09/2013, 06/03/2014, 15/02/2015, 22/08/2015, 17/08/2016, 24/07/2020
global glvif nargin==1 % for specific defined case switch eb % 只输入一个参数eb,eb应为1或2,采用严老师设置的惯性级imu误差case 1, imuerr = imuerrset(0.01, 100, 0.001, 10);case 2, imuerr = imuerrset(0.01,100,0.001,10, 0.001,300,10,300, 10,10,10,10, 10, 2, 1);endreturn;endo31 = zeros(3,1); o33 = zeros(3);% 设置imu误差结构体,对未输入变量设置默认值imuerr = struct('eb',o31, 'db',o31, 'web',o31, 'wdb',o31,...'sqg',o31, 'taug',inf(3,1), 'sqa',o31, 'taua',inf(3,1), 'dKg',o33, 'dKa',o33, 'dKga',zeros(15,1),'KA2',o31); %% constant bias & random walk 陀螺和加速度计的常值零偏和随机游走if ~exist('web', 'var'), web=0; end % 如果未输入角度随机游走,则设置其为0if ~exist('wdb', 'var'), wdb=0; end % 如果未输入速度随机游走,则设置其为0if length(eb)==2, eb=[eb(1);eb(1);eb(2)]; endif length(db)==2, db=[db(1);db(1);db(2)]; endif length(web)==2, web=[web(1);web(1);web(2)]; endif length(wdb)==2, wdb=[wdb(1);wdb(1);wdb(2)]; end% 转化成国际标准单位imuerr.eb(1:3) = eb*glv.dph; imuerr.web(1:3) = web*glv.dpsh;imuerr.db(1:3) = db*glv.ug; imuerr.wdb(1:3) = wdb*glv.ugpsHz;%% correlated bias 陀螺和加速度计的相关零偏if exist('sqrtR0G', 'var')if TauG(1)==inf, imuerr.sqg(1:3) = sqrtR0G*glv.dphpsh; % algular rate random walk !!! 如果陀螺相关时间无穷大,陀螺零偏建模成随机游走elseif TauG(1)>0, imuerr.sqg(1:3) = sqrtR0G*glv.dph.*sqrt(2./TauG); imuerr.taug(1:3) = TauG; % Markov process 如果陀螺相关时间大于0,陀螺零偏建模成马尔可夫过程endendif exist('sqrtR0A', 'var')if TauA(1)==inf, imuerr.sqa(1:3) = sqrtR0A*glv.ugpsh; % specific force random walk !!! 如果加速度计相关时间无穷大,加速度计零偏建模成随机游走elseif TauA(1)>0, imuerr.sqa(1:3) = sqrtR0A*glv.ug.*sqrt(2./TauA); imuerr.taua(1:3) = TauA; % Markov process 如果加速度计相关时间大于0,加速度计零偏建模成马尔可夫过程endend%% scale factor error 陀螺和加速度计的尺度因子误差if exist('dKGii', 'var')imuerr.dKg = setdiag(imuerr.dKg, dKGii*glv.ppm); % 将陀螺尺度因子误差赋值予陀螺标定刻度误差的对角线元素endif exist('dKAii', 'var')imuerr.dKa = setdiag(imuerr.dKa, dKAii*glv.ppm);end%% installation angle errorif exist('dKGij', 'var') % 将陀螺安装误差角赋值予陀螺标定刻度误差的非对角线元素dKGij = ones(6,1).*dKGij*glv.sec; imuerr.dKg(2,1) = dKGij(1); imuerr.dKg(3,1) = dKGij(2); imuerr.dKg(3,2) = dKGij(3); imuerr.dKg(1,2) = dKGij(4); imuerr.dKg(1,3) = dKGij(5); imuerr.dKg(2,3) = dKGij(6);endif exist('dKAij', 'var') % 将陀螺安装误差角赋值予陀螺标定刻度误差的非对角线元素dKAij = ones(3,1).*dKAij*glv.sec;imuerr.dKa(2,1) = dKAij(1); imuerr.dKa(3,1) = dKAij(2); imuerr.dKa(3,2) = dKAij(3); endimuerr.dKga = [imuerr.dKg(:,1); imuerr.dKg(:,2); imuerr.dKg(:,3);imuerr.dKa(:,1); imuerr.dKa(2:3,2); imuerr.dKa(3,3)];%% acc 2nd scale factor error 加速度计比例因子误差的二阶项if exist('KA2', 'var')imuerr.KA2(1:3) = KA2*glv.ugpg2; end%% acc inner-lever-arm error 加速度计的内杠杆臂误差if exist('rxyz', 'var')if length(rxyz)==1, rxyz(1:6)=rxyz; endif length(rxyz)==6, rxyz(7:9)=[0;0;0]; end imuerr.rx = rxyz(1:3)/100; imuerr.ry = rxyz(4:6)/100; imuerr.rz = rxyz(7:9)/100;end%% time-asynchrony between gyro & acc 陀螺和加速度计采样时刻未对准误差if exist('dtGA', 'var')imuerr.dtGA = dtGA/1000; % dtGA>0,加速度计采样滞后陀螺end
7、其它常用变量
1.角速率 wnie
角速率 ω i e n \omega^n_{ie} ωien 即 e e e 系相对于 i i i 系的角速度在 n n n 系的投影。wnin和wnen等变量符号类似,表示 ω i n n \omega^n_{in} ωinn、 ω e n n \omega^n_{en} ωenn
2. 不可交换误差补偿 phim/dvbm
陀螺角增量经不可交换误差补偿后的等效旋转矢量 ϕ m \phi_m ϕm
m − 1 m-1 m−1 到 m m m 时间段比力速度增量,经过不可交换误差补偿后的比力速度增量 Δ V m b \Delta V_m^b ΔVmb
3.重力矢量 gn
当地重力矢量gn=[0;0;-g],n表示 n n n 系下投影,g为重力大小
4.有害加速度 gcc
有害加速度,两个c,一个表示哥氏,一个表示向心力
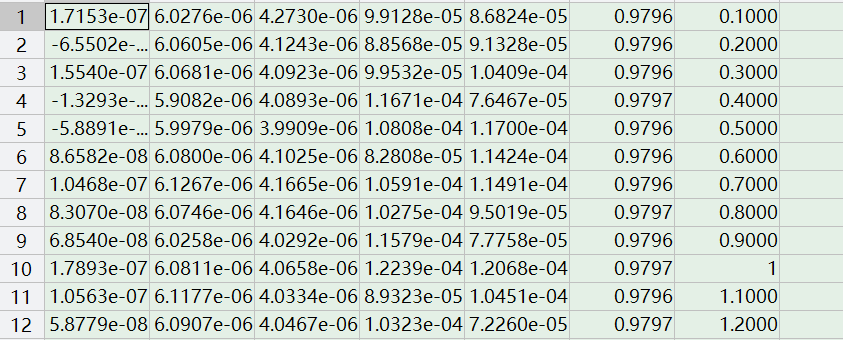
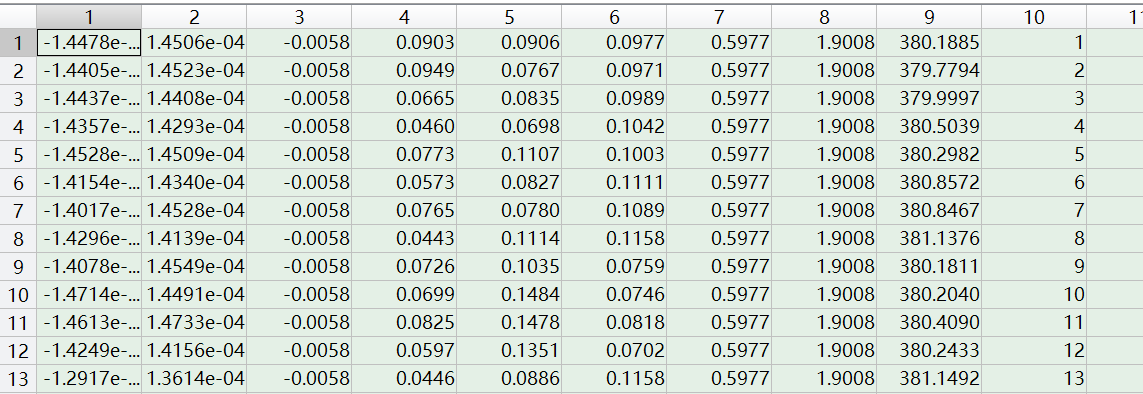
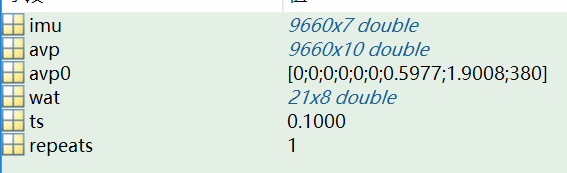
5.仿真轨迹结构体 trj
仿真轨迹结构体,存仿真中得到的avg、imu等参数,参见base1文件夹中的trjsimu函数:
global glvif nargin<4, repeats = 1; endwat1 = repmat(wat, repeats, 1);% 设置初始参数:位置、姿态、地球参数damping = 1-exp(-ts/5.0); % damping=0;att = avp0(1:3); vn = avp0(4:6); pos = avp0(7:9);eth = earth(pos, vn); Cbn_1 = a2mat(att)'; wm_1 = [0;0;0]; ts2 = ts/2;
% Mpv = [0, 1/eth.RMh, 0; 1/eth.clRNh, 0, 0; 0, 0, 1];len = fix(sum(wat1(:,1))/ts);[imu, avp] = prealloc(len, 7, 10);ki = timebar(1, len, 'Trajectory Simulation.');for k=1:size(wat1,1)lenk = round(wat1(k,1)/ts); % the lenght at k phase K时段的长度wt = wat1(k,3:5)'; at = wat1(k,6:8)'; % 当前时刻角速率、加速度% 设置匀速运动ufflag、计算导航系参考速度ufflag = 0;if norm(wt)==0 && norm(at)==0 % uniform phase flagufflag = 1; vnr = a2mat(att)*[0;wat1(k,2);0]; % velocity damping referenceendfor j=1:lenk% 计算Cnt,将前向速度通过航向角、俯仰角转到导航系sa = sin(att); ca = cos(att);si = sa(1); sk = sa(3); ci = ca(1); ck = ca(3); Cnt = [ ck, -ci*sk, si*sk; sk, ci*ck, -si*ck; 0, si, ci ];% 计算当前时刻姿态及 b->n 旋转矩阵 att = att + wt*ts;Cnb = a2mat(att); % attitudeif ufflag==1 % dampingna = norm(vn-vnr)/ts; maxa = 0.1;if na<maxa, na=maxa; end % max an is limited to maxa/(m/s^2)vn1 = vn-damping/na*(vn-vnr); an = (vn1-vn)/ts;vn01 = (vn+vn1)/2; vn = vn1;elsean = Cnt*at;vn1 = vn + an*ts; vn01 = (vn+vn1)/2; vn = vn1; % velocityend% 根据平均速度更新位置dpos01 = [vn01(2)/eth.RMh;vn01(1)/eth.clRNh;vn01(3)]*ts2;eth = earth(pos+dpos01, vn01);pos = pos+dpos01*2; % position
% eth = earth(pos+Mpv*vn01*ts2, vn01);
% Mpv = [0, 1/eth.RMh, 0; 1/eth.clRNh, 0, 0; 0, 0, 1];
% pos = pos+Mpv*vn01*ts; % position% 更新陀螺输出wmphim = m2rv(Cbn_1*Cnb) + (Cbn_1+Cnb')*(eth.wnin*ts2);
% wm = phim;wm = (glv.I33+askew(wm_1/12))^-1*phim; % gyro increment
% wm = (glv.I33-askew(wm_1/12))*phim; % gyro increment
% dvbm = Cbn_1*qmulv(rv2q(eth.wnin*ts2), (an-eth.gcc)*ts);% 更新加速度输出vmdvbm = Cbn_1*(rv2m(eth.wnin*ts2)*(an-eth.gcc)*ts);vm = (glv.I33+askew(wm/2))^-1*dvbm; % acc increment
% vm = (glv.I33-askew(wm/2))*dvbm; % acc incrementkts = ki*ts;avp(ki,:) = [att; vn; pos; kts]';imu(ki,:) = [wm; vm; kts]';wm_1 = wm; Cbn_1 = Cnb';ki = timebar;endendavp(ki:end,:) = []; imu(ki:end,:) = [];avp = iatt2c(avp);trj = varpack(imu, avp, avp0, wat, ts, repeats);
6.指北方位捷联导航解算结构体 ins
指北方位捷联导航解算结构体,参见base1文件夹中的insinit函数:
function ins = insinit(avp0, ts, var1, var2)
% SINS structure array initialization.
%
% Prototype: ins = insinit(avp0, ts, var1, var2)
% Initialization usages(maybe one of the following methods):
% ins = insinit(avp0, ts);
% ins = insinit(avp0, ts, avperr);
% ins = insinit(qnb0, vn0, pos0, ts);
% Inputs: avp0 - initial avp0 = [att0; vn0; pos0]
% ts - SIMU sampling interval
% avperr - avp error setting
% Output: ins - SINS structure array
%
% See also insupdate, avpset, kfinit.% Copyright(c) 2009-2014, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 22/03/2008, 12/01/2013, 18/03/2014
global glvavp0 = avp0(:);if length(avp0)==1, avp0=zeros(9,1); end % ins = insinit(0, ts);if length(avp0)==4, avp0=[0;0;avp0(1); 0;0;0; avp0(2:4)]; end % ins = insinit([yaw;pos], ts);if length(avp0)==6, avp0=[avp0(1:3); 0;0;0; avp0(4:6)]; end % ins = insinit([att;pos], ts);if length(avp0)==7, avp0=[0;0;avp0]; end % ins = insinit([yaw;vn;pos], ts);if nargin==2 % ins = insinit(avp0, ts);[qnb0, vn0, pos0] = setvals(a2qua(avp0(1:3)), avp0(4:6), avp0(7:9));elseif nargin==3 % ins = insinit(avp0, ts, avperr);avperr = var1;avp0 = avpadderr(avp0, avperr);[qnb0, vn0, pos0] = setvals(a2qua(avp0(1:3)), avp0(4:6), avp0(7:9));elseif nargin==4 % ins = insinit(qnb0, vn0, pos0, ts);[qnb0, vn0, pos0, ts] = setvals(avp0, ts, var1, var2);end ins = [];ins.ts = ts; ins.nts = 2*ts;[ins.qnb, ins.vn, ins.pos] = setvals(qnb0, vn0, pos0); ins.vn0 = vn0; ins.pos0 = pos0;[ins.qnb, ins.att, ins.Cnb] = attsyn(ins.qnb); ins.Cnb0 = ins.Cnb;ins.avp = [ins.att; ins.vn; ins.pos];ins.eth = ethinit(ins.pos, ins.vn);% 'wib,web,fn,an,Mpv,MpvCnb,Mpvvn,CW' may be very useful outside SINS,% so we calucate and save them.ins.wib = ins.Cnb'*ins.eth.wnin;ins.fn = -ins.eth.gn; ins.fb = ins.Cnb'*ins.fn;[ins.wnb, ins.web, ins.an] = setvals(zeros(3,1));ins.Mpv = [0, 1/ins.eth.RMh, 0; 1/ins.eth.clRNh, 0, 0; 0, 0, 1];ins.MpvCnb = ins.Mpv*ins.Cnb; ins.Mpvvn = ins.Mpv*ins.vn; [ins.Kg, ins.Ka] = setvals(eye(3)); % calibration parameters[ins.eb, ins.db] = setvals(zeros(3,1));[ins.tauG, ins.tauA] = setvals(inf(3,1)); % gyro & acc correlation timeins.lever = zeros(3,1); ins = inslever(ins); % lever armins.tDelay = 0; % time delayins.openloop = 0;glv.wm_1 = zeros(3,1)'; glv.vm_1 = zeros(3,1)'; % for 'single sample+previous sample' coning algorithmins.an0 = zeros(3,1); ins.anbar = ins.an0;
7.导航地球相关计算结构体 eth
导航地球相关计算结构体,参见 base1文件夹中的ethinit函数:
function eth = ethinit(pos, vn)
% The Earth related parameters (structure array) initialization.
%
% Prototype: eth = ethinit(pos, vn)
% Inputs: pos - geographic position [lat;lon;hgt]
% vn - velocity
% Outputs: eth - parameter structure array
%
% See also ethupdate, earth.% Copyright(c) 2009-2014, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 23/05/2014
global glvif nargin<2, vn = [0; 0; 0]; endif nargin<1, pos = [0; 0; 0]; endeth.Re = glv.Re; eth.e2 = glv.e2; eth.wie = glv.wie; eth.g0 = glv.g0;eth = ethupdate(eth, pos, vn);eth.wnie = eth.wnie(:); eth.wnen = eth.wnen(:);eth.wnin = eth.wnin(:); eth.wnien = eth.wnien(:);eth.gn = eth.gn(:); eth.gcc = eth.gcc(:);
8.Kalman滤波结构体 kf
Kalman 滤波结构体,会根据定义的维数psinsdef进行对应的初始化,参见kf文件夹中的kfinit函数:
function kf = kfinit(ins, varargin)
% Kalman filter initializes for structure array 'kf', this precedure
% usually includs the setting of structure fields: Qt, Rk, Pxk, Hk.
%
% Prototype: kf = kfinit(ins, varargin)
% Inputs: ins - SINS structure array, if not struct then nts=ins;
% varargin - if any other parameters
% Output: kf - Kalman filter structure array
%
% See also kfinit0, kfsetting, kffk, kfkk, kfupdate, kffeedback, psinstypedef.% Copyright(c) 2009-2014, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 09/10/2013
global glv psinsdef
[Re,deg,dph,ug,mg] = ... % just for shortsetvals(glv.Re,glv.deg,glv.dph,glv.ug,glv.mg);
o33 = zeros(3); I33 = eye(3);
kf = [];
if isstruct(ins), nts = ins.nts;
else nts = ins;
end
switch(psinsdef.kfinit)case psinsdef.kfinit153,psinsdef.kffk = 15; psinsdef.kfhk = 153; psinsdef.kfplot = 15;[davp, imuerr, rk] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; zeros(9,1)])^2;kf.Rk = diag(rk)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db]*1.0)^2;kf.Hk = kfhk(0);case psinsdef.kfinit156,psinsdef.kffk = 15; psinsdef.kfhk = 156; psinsdef.kfplot = 15;[davp, imuerr, rk] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; zeros(9,1)])^2;kf.Rk = diag(rk)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db]*1.0)^2;kf.Hk = kfhk(0);case psinsdef.kfinit183,psinsdef.kffk = 18; psinsdef.kfhk = 183; psinsdef.kfplot = 18;[davp, imuerr, lever, r0] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; zeros(9+3,1)])^2;kf.Rk = diag(r0)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db; lever]*1.0)^2;kf.Hk = zeros(3,18);case psinsdef.kfinit186,psinsdef.kffk = 18; psinsdef.kfhk = 186; psinsdef.kfplot = 18;[davp, imuerr, lever, r0] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; zeros(3,1); imuerr.sqg; imuerr.sqa; zeros(3,1)])^2;kf.Rk = diag(r0)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db; lever]*1.0)^2;kf.Hk = zeros(6,18);case psinsdef.kfinit193psinsdef.kffk = 19; psinsdef.kfhk = 193; psinsdef.kfplot = 19;[davp, imuerr, lever, dT, r0] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; [1/Re;1/Re;1]*glv.mpsh; ...[1;1;1]*0*glv.dphpsh; [1;1;1]*0*glv.ugpsh; [1;1;1]*0.*glv.mpsh; 0])^2;kf.Rk = diag(r0)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db; lever; dT]*1.0)^2;kf.Hk = zeros(3,19);case psinsdef.kfinit196psinsdef.kffk = 19; psinsdef.kfhk = 196; psinsdef.kfplot = 19;[davp, imuerr, lever, dT, r0] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; [1/Re;1/Re;1]*0*glv.mpsh; ...[1;1;1]*0*glv.dphpsh; [1;1;1]*0*glv.ugpsh; [1;1;1]*0*glv.mpsh; 0])^2;kf.Rk = diag(r0)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db; lever; dT]*1.0)^2;kf.Hk = zeros(6,19);case psinsdef.kfinit246psinsdef.kffk = 24; psinsdef.kfhk = 246; psinsdef.kfplot = 24;[davp, imuerr, r0] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; [1/Re;1/Re;1]*0*glv.mpsh; ...[1;1;1]*0*glv.dphpsh; [1;1;1]*0*glv.ugpsh; zeros(9,1)])^2;kf.Rk = diag(r0)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db; imuerr.dKga(1:9)]*1.0)^2;kf.Hk = zeros(6,24);case psinsdef.kfinit331,psinsdef.kffk = 33; psinsdef.kfhk = 331; psinsdef.kfplot = 33;[davp, imuerr, r0] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; zeros(9+15+3,1)])^2;kf.Rk = diag(r0)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db; imuerr.dKga; imuerr.KA2])^2;kf.Hk = kfhk(ins);kf.xtau(1:psinsdef.kffk,1) = 0;case psinsdef.kfinit346,psinsdef.kffk = 34; psinsdef.kfhk = 346; psinsdef.kfplot = 34;[davp, imuerr, lever, dT, r0] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; zeros(9+3+1+15,1)])^2;kf.Rk = diag(r0)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db; lever; dT; imuerr.dKga])^2;kf.Hk = kfhk(ins);kf.xtau(1:psinsdef.kffk,1) = 0;case psinsdef.kfinit376,psinsdef.kffk = 37; psinsdef.kfhk = 376; psinsdef.kfplot = 37;[davp, imuerr, lever, dT, r0] = setvals(varargin);kf.Qt = diag([imuerr.web; imuerr.wdb; zeros(9+3+1+15+3,1)])^2;kf.Rk = diag(r0)^2;kf.Pxk = diag([davp; imuerr.eb; imuerr.db; lever; dT; imuerr.dKga; davp(4:6)]*10)^2;kf.Hk = kfhk(ins);kf.xtau(1:psinsdef.kffk,1) = 0;otherwise,kf = feval(psinsdef.typestr, psinsdef.kfinittag, [{ins},varargin]);
end
kf = kfinit0(kf, nts);
五、数据导入、转换
- 二进制(纯double型)格式文件,使用
binfile函数,这对导入C语言生成的数据文件快速方便;或者可参照binfile,使用fread自行编程导入特定格式的二进制文件; - 文本文件/或
.mat格式文件,使用Matlab的load或importdata函数;mat是MATLAB专用的数据文件,有压缩,很方便MATLAB之间存数据,但C语言中没法读。 - 特殊格式的 PSINS-IMU/AVP 文件,可用
imufile、avpfile等函数。
从文件直接导入 Matlab 工作空间的数据通常是一个二维数组,其各列顺序及量纲单位不一定符合 PSINS 的习惯,需再进行数据提取和转换:
- 使用
imuidx提取 IMU 数据并进行单位转换,陀螺为角增量、加表为速度增量;如需要,还可借助于imurfu函数将 IMU 转换至右-前-上坐标系; - 使用
avpidx提取 AVP 数据并进行单位转换,结果姿态/纬经为弧度、方位角北偏西为正; - 使用
gpsidx提取GNSS速度/定位数据并进行单位转换,纬经度为弧度;通常GNSS的频率低于IMU频率,为删除重复数据行可调用norep函数;为删除数据为0行可调用no0函数; - 使用
tshift或adddt函数可将数据的起始时间转换至指定的相对时间。一般用相对时间而不用周内秒,周内秒数值太大了,看着不方便。
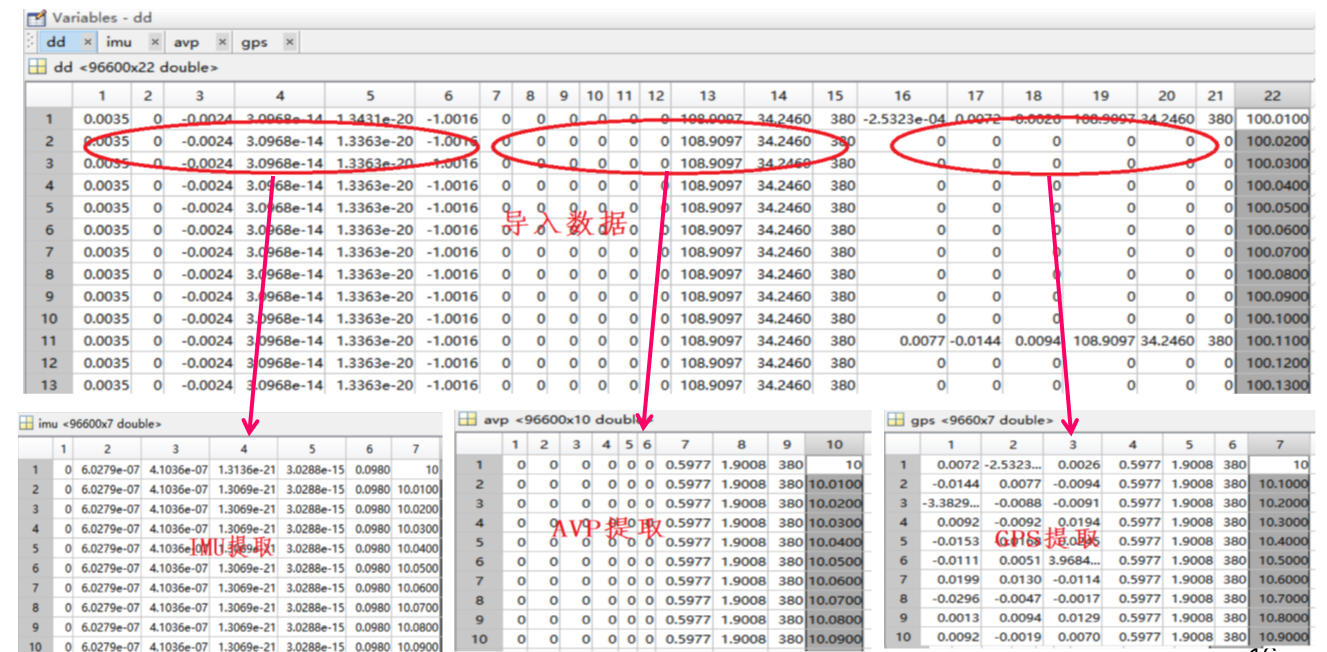
参考test_IMUAVPGPS_extract_trans.m脚本文件,代码和效果图如下:
dd = binfile('imuavpgps.bin', 22);
open dd;
imu = imurfu(imuidx(dd, [1:6,22],glv.dps,glv.g0,trj.ts),'frd');
avp = avpidx(dd,[7:12,14,13,15,22],1,1);
gps = gpsidx(dd,[17,16,-18,20,19,21,22],1);
[imu,avp,gps] = tshift(imu,avp,gps,10);
六、绘图显示
1、绘图辅助函数
-
myfig:创建图窗,有两种用法:myfig()、myfig('图窗名')、myfig('图窗名','纵坐标标签'):调用myfigure创建一个画图窗口,绘制白底全屏图(MATLAB直接画是灰底没全屏的),传回图窗句柄,可传入图窗名。当第一个参数是字符串时,第二个参数不起作用。myfig('绘图数据','纵坐标标签'):直接调用myfigure、plot、xygo绘图。
function h = myfig(namestr, ylb)if ~exist('namestr','var')h0 = myfigure;else% 如果传入第一个参数是用于绘图的数据,第二个参数是纵坐标标签,直接plot、xygo绘图if ~ischar(namestr) % myfig(data, ylabel); if nargin<2, ylb='val'; endmyfig; plot(namestr); xygo(ylb);return;endh = myfigure(namestr); endif nargout==1 % 如果要获取返回值,传回图窗句柄h = h0;endfunction h = myfigure(namestr)scrsz = get(0,'ScreenSize'); % scrsz = [left, bottom, width, height] 获取屏幕分辨率scrsz = [0.01*scrsz(3), 0.05*scrsz(4), 0.95*scrsz(3), 0.93*scrsz(4)]; % figure('Position',scrsz);if ~exist('namestr','var')namestr = 'PSINS Toolbox';endh0 = figure('OuterPosition',scrsz, 'Name',namestr, 'Color','White');% set(gcf, 'Color','White');if nargout==1 % 如果要获取返回值,传回图窗句柄h = h0;end -
xygo:启用网格(grid on)、给出坐标轴横纵标签(特殊标识由labeldef函数给出)。有三种用法:xygo():默认纵轴是value,默认横轴是时间txygo('纵轴标签'):传入纵轴标签,默认横轴是时间txygo('横轴标签','纵轴标签'):传入横轴标签、纵轴标签
function xygo(xtext, ytext)% 如果没传入参数,默认纵轴是 value,默认横轴是时间 tif nargin==0 % xygo ytext = 'value';xtext = labeldef('t');end% 如果传入一个参数,其做为纵轴标签,默认横轴是时间 tif nargin==1 % xygo(ytext) ytext = xtext;xtext = labeldef('t');end% 如果传入两个参数,作为横轴、纵轴xlabel(labeldef(xtext));ylabel(labeldef(ytext));grid on; hold on; -
labeldef:定义简化标签精以简代码,调用此函数可以将简化标签转为完整标签。其中specl_string结构体存着简化标签与完整标签的对应关系。如果传入的是t,根据所选时间刻度选择合适的时间单位。function stext = labeldef(stext)global glvglobal specl_stringif isempty(specl_string)% 标签对应结构体,第一列为简洁标签,第二列为对应的完整形式 specl_string = {... % string cell't/s' '\itt \rm / s';'t/m' '\itt \rm / min';'t/h' '\itt \rm / h';'t/d' '\itt \rm / d';'phi', '\it\phi\rm / ( \prime )';'phiE', '\it\phi\rm_E / ( \prime\prime )';'phiN', '\it\phi\rm_N / ( \prime\prime )';'phiU', '\it\phi\rm_U / ( \prime )';'phiEN', '\it\phi\rm_E,\it\phi\rm_N / ( \prime\prime )';'phix', '\it\phi_x\rm / ( \circ )';'phiy', '\it\phi_y\rm / ( \circ )';'phiz', '\it\phi_z\rm / ( \circ )';'phixy', '\it\phi _{x,y}\rm / ( \circ )';'mu', '\it\mu \rm / ( \prime )';'mux', '\it\mu_x \rm / ( \prime )';'muy', '\it\mu_y \rm / ( \prime )';'muz', '\it\mu_z \rm / ( \prime )';'theta', '\it\theta \rm / ( \prime )';'dVEN', '\it\delta V \rm_{E,N} / ( m/s )';'dVE', '\delta\it V \rm_E / ( m/s )';'dVN', '\delta\it V \rm_N / ( m/s )';'dVU', '\delta\it V \rm_U / ( m/s )';'dV', '\delta\it V\rm / ( m/s )';'pr', '\it\theta , \gamma\rm / ( \circ )';'ry', '\it\gamma , \psi\rm / ( \circ )';'p', '\it\theta\rm / ( \circ )';'r', '\it\gamma\rm / ( \circ )';'y', '\it\psi\rm / ( \circ )';'att', '\itAtt\rm / ( \circ )';'datt', '\itdAtt\rm / ( \prime )';'VEN', '\itV \rm_{E,N} / ( m/s )';'VE', '\itV \rm_E / ( m/s )';'VN', '\itV \rm_N / ( m/s )';'VU', '\itV \rm_U / ( m/s )';'V', '\itV\rm / ( m/s )';'Vx', '\itVx\rm / ( m/s )';'Vy', '\itVy\rm / ( m/s )';'Vz', '\itVz\rm / ( m/s )';'dlat', '\delta\it L\rm / m';'dlon', '\delta\it \lambda\rm / m';'dH', '\delta\it H\rm / m';'dP', '\delta\it P\rm / m';'lat', '\itL\rm / ( \circ )';'lon', '\it\lambda\rm / ( \circ )';'hgt', '\ith\rm / ( m )';'xyz', 'XYZ / ( m )';'est', 'East\rm / m';'nth', 'North\rm / m';'H', '\itH\rm / m';'DP', '\Delta\it P\rm / m';'ebyz', '\it\epsilon _{y,z}\rm / ( (\circ)/h )';'eb', '\it\epsilon\rm / ( (\circ)/h )';'en', '\it\epsilon\rm / ( (\circ)/h )';'db', '\it\nabla\rm / \mu\itg';'dKij', '\delta\itKij\rm / (\prime\prime)';'dKii', '\delta\itKii\rm / ppm';'Ka2', 'Ka2 / ug/g^2';'dbU', '\it\nabla \rm_U / \mu\itg';'L', '\itLever\rm / m';'dT', '\delta\it T_{asyn}\rm / s';'dKgzz', '\delta\it Kgzz\rm / ppm';'dKg', '\delta\it Kg\rm / ppm';'dAg', '\delta\it Ag\rm / ( \prime\prime )';'dKa', '\delta\it Ka\rm / ppm';'dAa', '\delta\it Aa\rm / ( \prime\prime )';'wx', '\it\omega_x\rm / ( (\circ)/s )';'wy', '\it\omega_y\rm / ( (\circ)/s )';'wz', '\it\omega_z\rm / ( (\circ)/s )';'w', '\it\omega\rm / ( (\circ)/s )';'wxdph', '\it\omega_x\rm / ( (\circ)/h )';'wydph', '\it\omega_y\rm / ( (\circ)/h )';'wzdph', '\it\omega_z\rm / ( (\circ)/h )';'wdph', '\it\omega\rm / ( (\circ)/h )';'fx', '\itf_x\rm / \itg';'fy', '\itf_y\rm / \itg';'fz', '\itf_z\rm / \itg';'f', '\itf\rm / \itg';'fxug', '\itf_x\rm / u\itg';'fyug', '\itf_y\rm / u\itg';'fzug', '\itf_z\rm / u\itg';'fug', '\itf\rm / u\itg';'Temp', '\itT\rm / \circC';'frq', '\itf\rm / Hz';'dinst', '\delta\it\theta , \rm\delta\it\psi\rm / ( \prime )';};end% 如果传入的是t,根据glv.tscale(end)里时间的尺度,选择合适的选择合适的时间单位if strcmp(stext,'t')==1switch glv.tscale(end)case 1, stext='t/s';case 60, stext='t/m';case 3600, stext='t/h';case 24*3600, stext='t/d';endend% 遍历上面定义的 specl_string 结构体,如果for k=1:length(specl_string)if strcmp(stext,specl_string(k,1))==1stext = specl_string{k,2};break;endend
2、传感器数据绘图
给传感器数据,直接画出上面的图,要写很多行代码,所以封装了一些函数:
-
imuplot、imumeanplot:IMU/平滑绘图,陀螺单位deg/s,加表单位g -
gpsplot:GNSS绘图,可同时包含速度和定位信息、或仅有定位信息。会做判断4列认为只有时间位置,7列认为时间位置速度 -
magplot:三轴地磁绘图,假设载体水平角为0,给出磁倾角/偏角 -
odplot/dvlplot:里程仪绘图(输入数据为路程增量,绘图显示为速度) -
baroplot:气压高度绘图,画压力对应的高度
3、导航结果绘图
-
insplot:纯惯性导航结果AVP绘图,三个姿态、三个速度、三个位置,- 俯仰角、横滚角通常比方位角小,分开画会显示的全面一些。
- 位置就是位置的增量
- 速度是东北天三个方向,和模值
- 二维轨迹图,用相对坐标
-
inserrplot、avpcmpplot:导航误差 -
avpcmpplot:比较绘图;有参考基准时、或高精度惯导和低精度惯导、或GNSS和惯导 -
kfplot、xpplot:Kalman滤波结果状态或均方差阵对角线元素绘图。
4、进度条函数
timebar:直观显示程序循环运行进度情况、在程序循环运行过程中如人为点击Cancel按钮则进度条则报错中断程序。循环里每一次都调用,返回调用的次数tk,参数:
tStep:每一步运行步数tTotal:总步数msgstr:进度条上要显示的字符串

七、SINS/GPS组合导航仿真举例
本篇只是举个仿真的例子,之后的博客再做细致的解读。
1、生成仿真轨迹
参考博客:PSINS源码阅读—test_SINS_trj、严恭敏老师PSINS工具箱解读——trjfile、关于PSINS运动轨迹仿真模块的理解和思考、PSINS工具箱中轨迹生成工具详细解析
参考书:严老师硕士论文第五章、捷联惯导与组合导航第8章
运行demo\test_SINS_trj.m脚本,生成仿真轨迹
glvs % 主程序的第一行一般都是glvs,定义全局变量
ts = 0.1; % sampling interval 采样时间
avp0 = [[0;0;0]; [0;0;0]; glv.pos0]; % init avp 设置avp初始参数
% trajectory segment setting 分段设置轨迹剖面参数,由一段段线拼接而成
% uniform:保持运动状态、accelerate:加速、coturnleft:左转、deaccelerate:减速
xxx = [];
seg = trjsegment(xxx, 'init', 0); % 轨迹结构数组的初始化
seg = trjsegment(seg, 'uniform', 100); % 保持上一状态100s
seg = trjsegment(seg, 'accelerate', 10, xxx, 1); % 用1m/s2的速度加速10s
seg = trjsegment(seg, 'uniform', 100); % 保持上一时刻状态100s
seg = trjsegment(seg, 'coturnleft', 45, 2, xxx, 4); % 协调左转弯,先横滚方向左转4s,再整体转45s,最后横滚方向右转4s.考虑到了航向与横滚
seg = trjsegment(seg, 'uniform', 100); % 保持上一个状态100s
seg = trjsegment(seg, 'coturnright', 10*5, 9, xxx, 4); % 协调右转弯,先横滚方向右转4s,再整体转50s,最后横滚方向左转4s.考虑到了航向与横滚
seg = trjsegment(seg, 'uniform', 100); % 保持上一时刻状态100s
seg = trjsegment(seg, 'climb', 10, 2, xxx, 50); % 向上爬坡10s
seg = trjsegment(seg, 'uniform', 100); % 保持上一时刻状态100s
seg = trjsegment(seg, 'descent', 10, 2, xxx, 50); % 下降10s
seg = trjsegment(seg, 'uniform', 100); % 保持上一时刻状态100s
seg = trjsegment(seg, 'deaccelerate', 5, xxx, 2); % 减速5s
seg = trjsegment(seg, 'uniform', 100); % 保持上一时刻状态100s
% generate, save & plot
trj = trjsimu(avp0, seg.wat, ts, 1);
trjfile('trj10ms.mat', trj);
insplot(trj.avp);
imuplot(trj.imu);
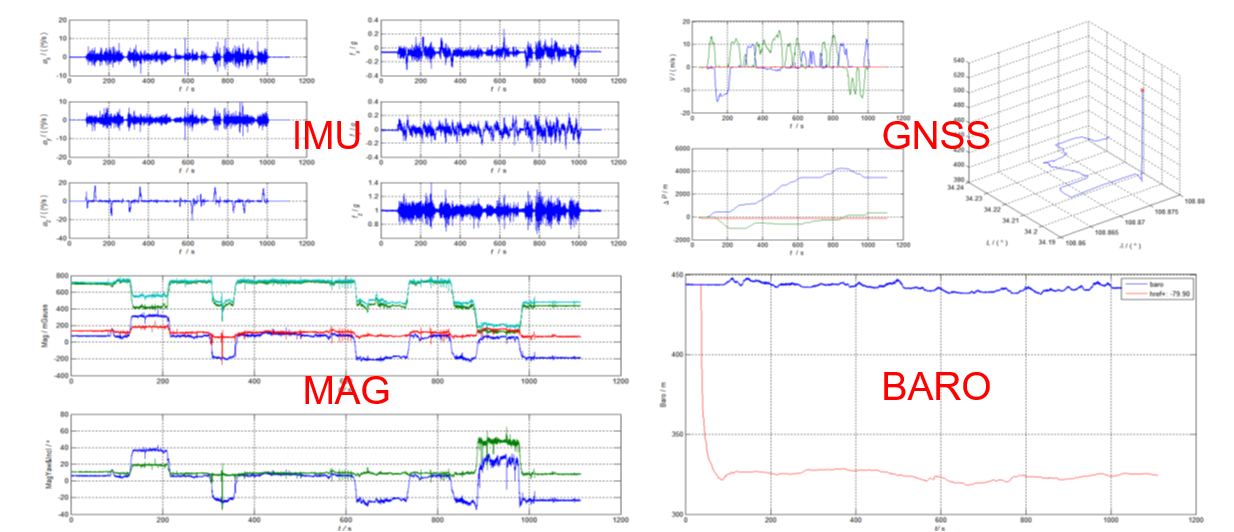
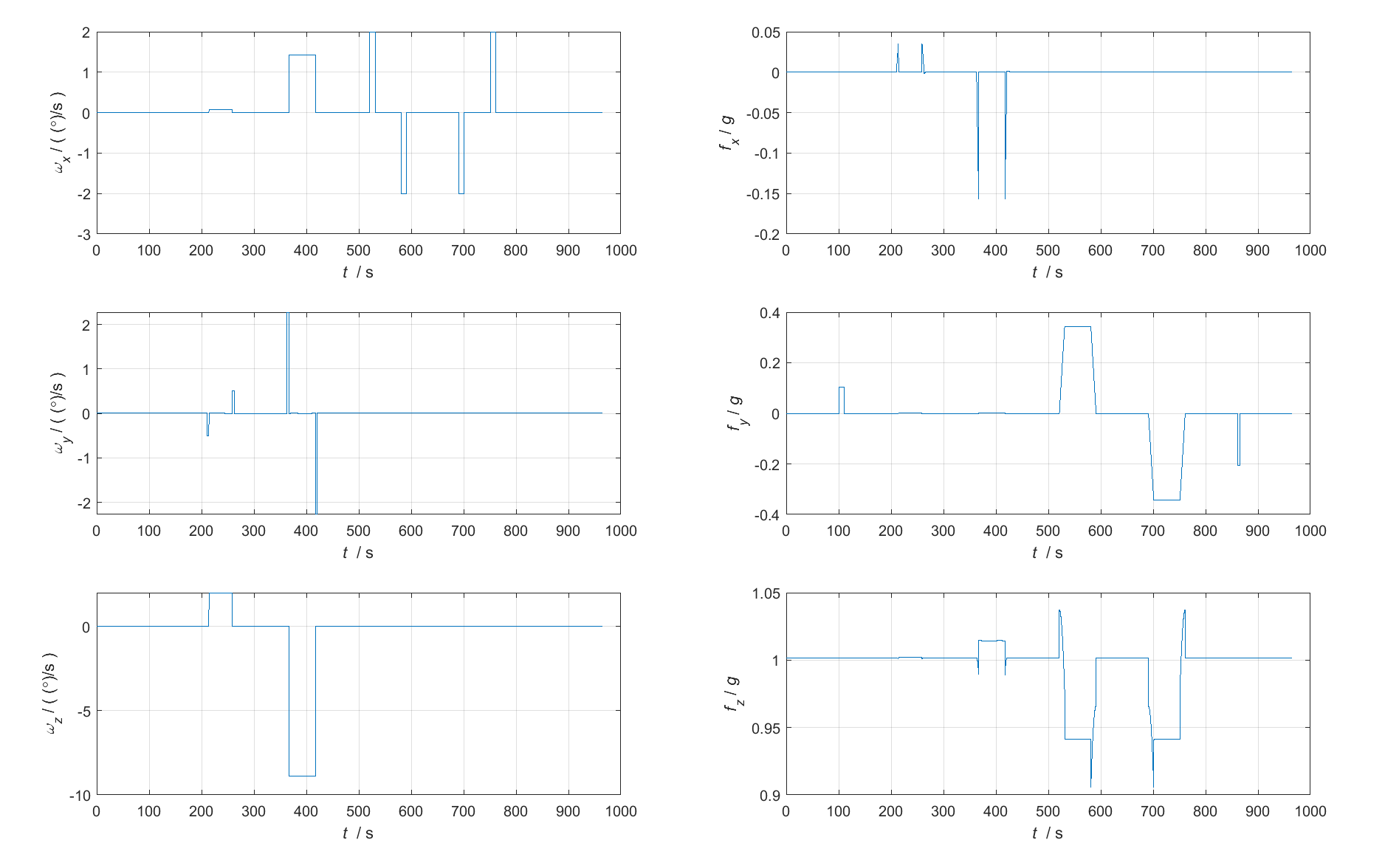
轨迹参数图:

IMU参数图:左边是三个陀螺的输出,右边是三个比力的输出
2、纯惯导仿真
运行demo\test_SINS.m脚本,纯惯导仿真
glvs
trj = trjfile('trj10ms.mat'); % 读轨迹
%% error setting 设置惯性器件误差和avp参数
imuerr = imuerrset(0.01, 100, 0.001, 10); % 陀螺漂移、零篇、加表随机游走、速度随机游走
imu = imuadderr(trj.imu, imuerr); % 往轨迹IMU中加上一步设置的误差
davp0 = avperrset([0.5;0.5;5], 0.1, [10;10;10]); % 失准角误差0.5/0.5/5、速度误差0.1m/s、位置误差等10m
avp00 = avpadderr(trj.avp0, davp0);
trj = bhsimu(trj, 1, 10, 3, trj.ts); % 气压高度计
%% pure inertial navigation & error plot 纯惯导解算作图
avp = inspure(imu, avp00, trj.bh, 1);
% avp = inspure(imu, avp00, 'f', 1);
avperr = avpcmpplot(trj.avp, avp); % 存惯导仿真结果与轨迹仿真结果比较作图
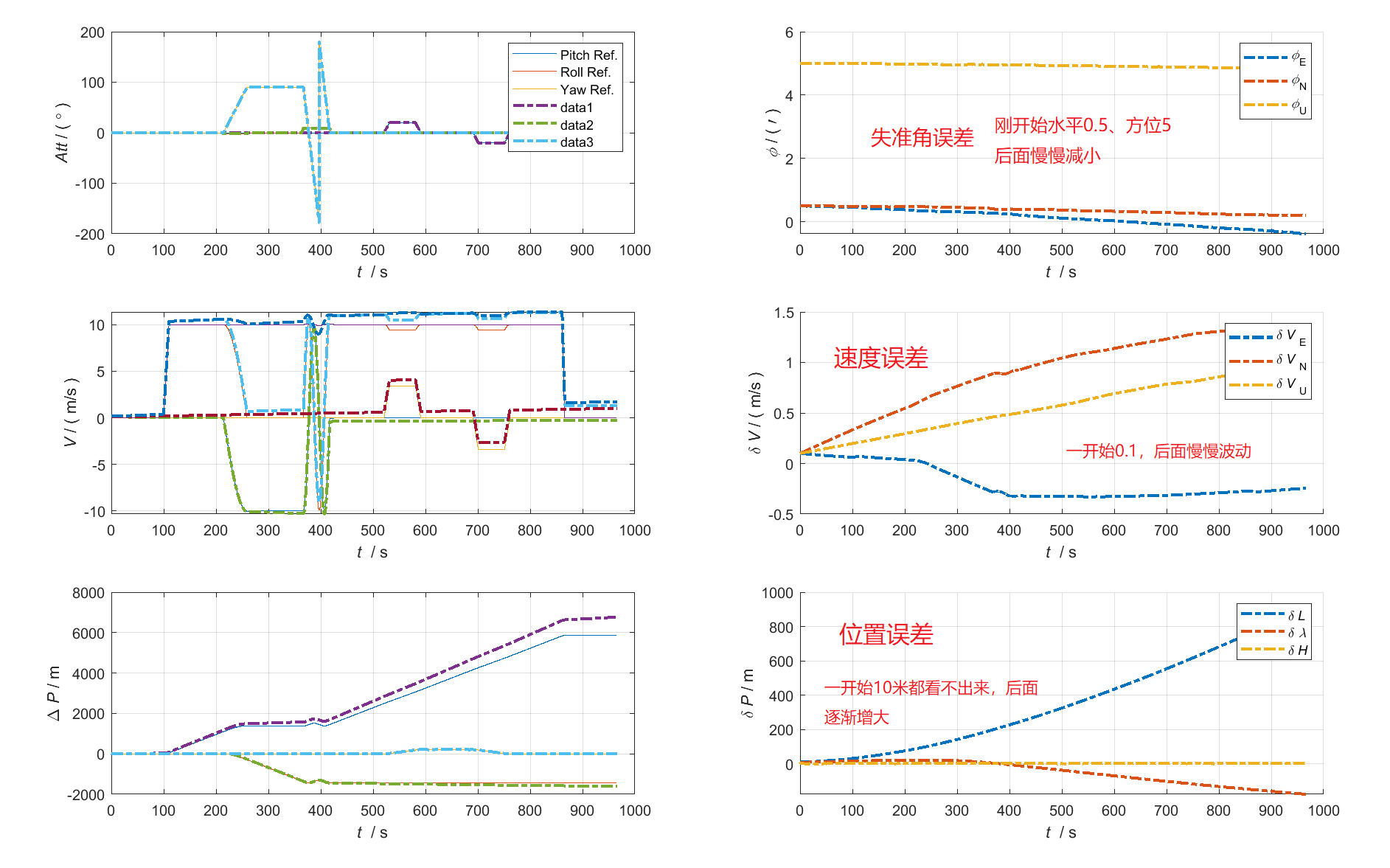
纯惯导仿真avp:可以看出到最后速度都不延北方向了

与真实轨迹比误差图:
3、SINS-GPS仿真
参考:严恭敏老师PSINS工具箱解读——test_SINS_GPS_153
运行demo\test_SINS_GPS_153.m脚本,组合导航仿真,15维状态+3维量测、15维状态:三个失准角、三个速度误差、三个位置误差、三个陀螺漂移常值、三个加计零偏常值
glvs
psinstypedef(153); % 全局变量,主要设置状态转移矩阵的维数、量测矩阵的维数和画图
trj = trjfile('trj10ms.mat'); % 加载轨迹数据
% initial settings
[nn, ts, nts] = nnts(2, trj.ts); % 子样数和采样间隔
imuerr = imuerrset(0.03, 100, 0.001, 5); % imu误差,分别为陀螺常值零偏、加速度计常值零偏、角度随机游走和速度随机游走,请参考imuerrset函数解读
imu = imuadderr(trj.imu, imuerr); % 对参考imu数据添加误差生成实际imu测量值,请参考imuadderr解读
davp0 = avperrset([0.5;-0.5;20], 0.1, [1;1;3]); % 初始姿态、速度和位置误差,注意姿态的单位为:分,请参考avperrset函数解读
ins = insinit(avpadderr(trj.avp0,davp0), ts); % 对参考初始姿态、速度和位置添加误差,并进行惯导初始化用于后面更新
% KF filter
rk = poserrset([1;1;3]); % 位置量测噪声
kf = kfinit(ins, davp0, imuerr, rk); % 卡尔曼滤波器初始化
kf.Pmin = [avperrset(0.01,1e-4,0.1); gabias(1e-3, [1,10])].^2; % 方差阵最小值
kf.pconstrain=1; % 方差阵上下限约束条件,1:表示约束
len = length(imu); [avp, xkpk] = prealloc(fix(len/nn), 10, 2*kf.n+1); % 对变量预先分配内存
timebar(nn, len, '15-state SINS/GPS Simulation.'); % 程序运行的进度条
ki = 1; % 量测更新的计数器
for k=1:nn:len-nn+1k1 = k+nn-1; wvm = imu(k:k1,1:6); t = imu(k1,end); % 角度增量和速度增量,采样时刻ins = insupdate(ins, wvm); % 惯导更新kf.Phikk_1 = kffk(ins); % 计算状态转移矩阵kf = kfupdate(kf); % 卡尔曼滤波器预测更新if mod(t,1)==0 % 判断是否有GNSS位置量测,此处认为GNSS为整秒量测,mod为求余数函数posGPS = trj.avp(k1,7:9)' + davp0(7:9).*randn(3,1); % GPS pos simulation with some white noise 模拟GNSS位置量测值kf = kfupdate(kf, ins.pos-posGPS, 'M'); % 卡尔曼滤波状态反馈[kf, ins] = kffeedback(kf, ins, 1, 'avp'); % 卡尔曼滤波状态反馈avp(ki,:) = [ins.avp', t]; % 姿态、速度、位置和时间xkpk(ki,:) = [kf.xk; diag(kf.Pxk); t]'; ki = ki+1; % 反馈后的剩余状态、方差阵和时间endtimebar; %
end
avp(ki:end,:) = []; xkpk(ki:end,:) = []; % 释放空间
% show results
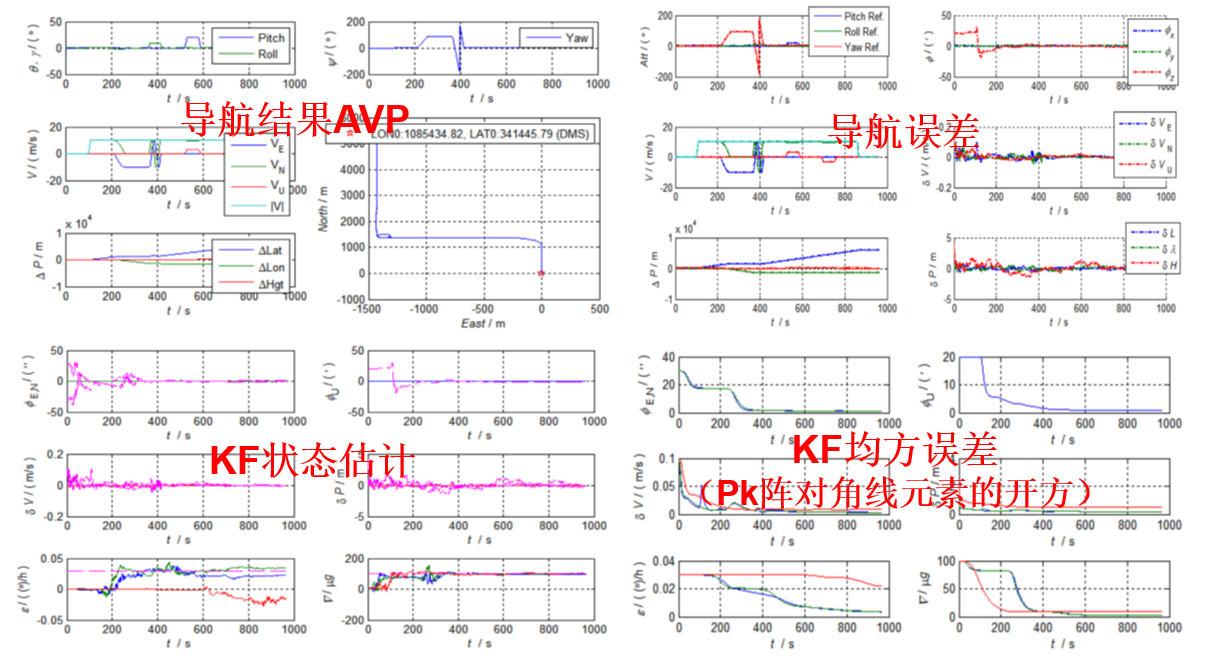
insplot(avp); % 调用 insplot 画姿态、速度和位置
avperr = avpcmpplot(trj.avp, avp); % 调用 avpcmpplot 画组合导航计算的avp与参考avp的差值
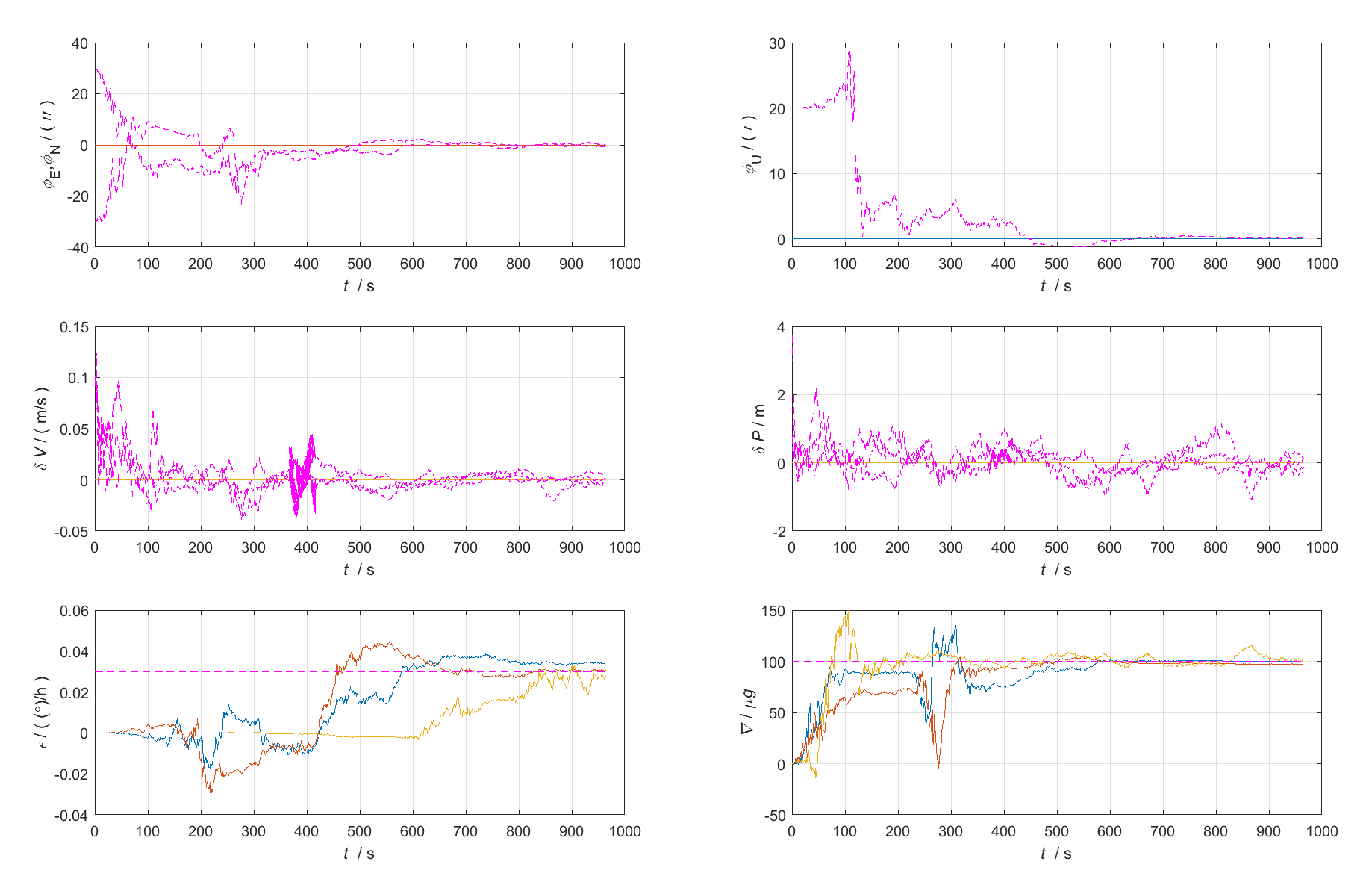
kfplot(xkpk, avperr, imuerr); % 调用 kfplot 画avp误差、imu误差、反馈后的剩余状态和方差阵
组合导航avp仿真图:与真实轨迹很接近了,最后的轨迹指北

与真实轨迹相比误差图:误差都逐渐收敛
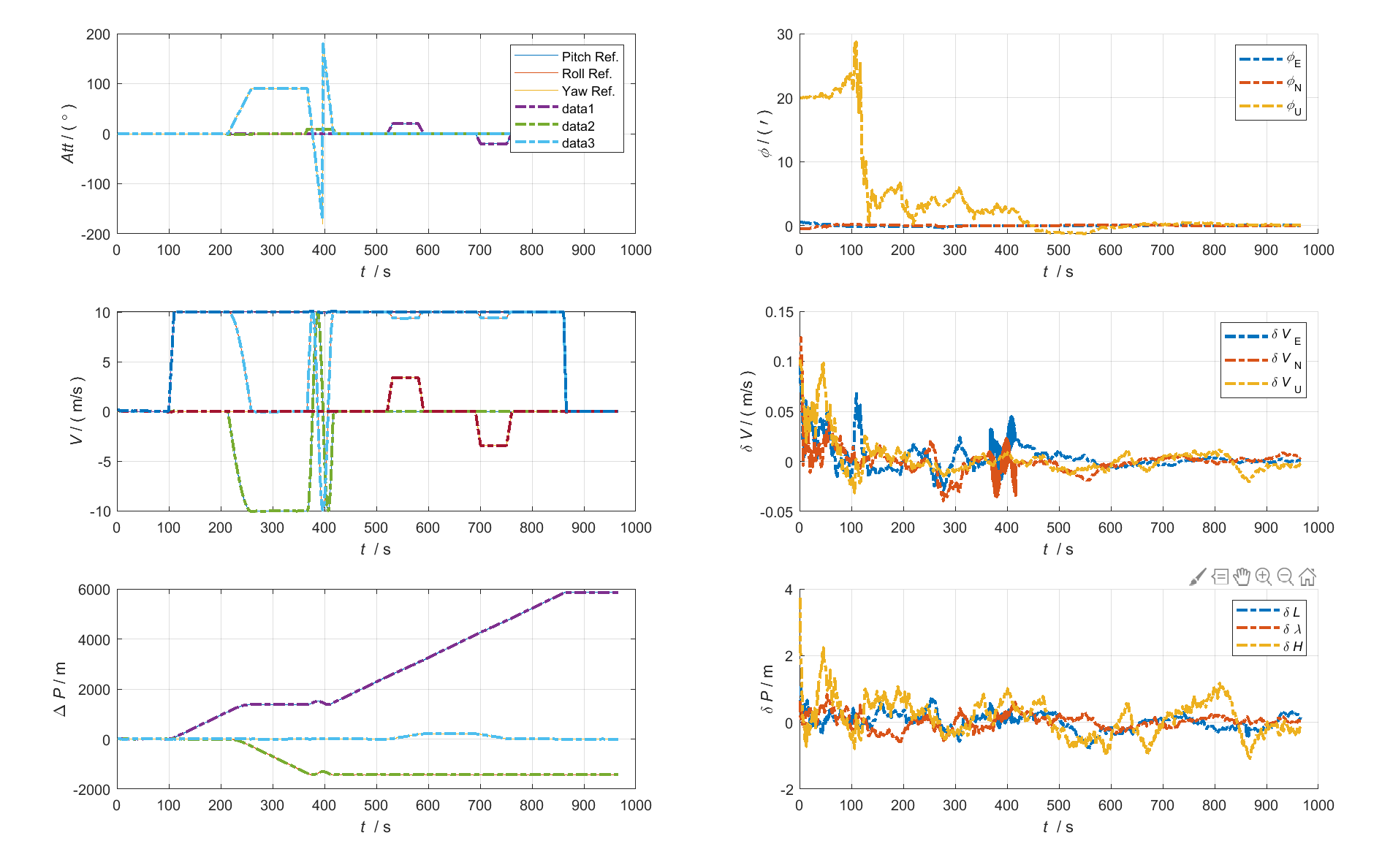
Kalman滤波图:有反馈的会逐渐趋于0,无反馈的趋于常值(与设置的基本吻合),明显能看出天向陀螺仪漂移估计的不如水平陀螺仪漂移
相关文章:
PSINS工具箱学习(一)下载安装初始化、SINS-GPS组合导航仿真、习惯约定与常用变量符号、数据导入转换、绘图显示
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning 文章目录 一、前言二、相关资源三、下载安装初始化1、下载PSINSyymmdd.rar工具箱文件2、解压文件3、初始化4、启动工具箱导览 四、习惯约定与常用变量符号1…...
国庆day1---消息队列实现进程之间通信方式代码,现象
snd: #include <myhead.h>#define ERR_MSG(msg) do{\fprintf(stderr,"__%d__:",__LINE__);\perror(msg);\ }while(0)typedef struct{ long msgtype; //消息类型char data[1024]; //消息正文 }Msg;#define SIZE sizeof(Msg)-sizeof(long)int main…...

wdb_2018_2nd_easyfmt
wdb_2018_2nd_easyfmt Arch: i386-32-little RELRO: Partial RELRO Stack: No canary found NX: NX enabled PIE: No PIE (0x8047000)32位只开了NX 这题get到一点小知识(看我exp就知道了 int __cdecl __noreturn main(int argc, const char…...
服务器数据恢复-zfs下raidz多块磁盘离线导致服务器崩溃的数据恢复案例
服务器数据恢复环境: 一台服务器共配备32块硬盘,组建了4组RAIDZ,Windows操作系统zfs文件系统。 服务器故障: 服务器在运行过程中突然崩溃,经过初步检测检测没有发现服务器存在物理故障,重启服务器后故障依…...
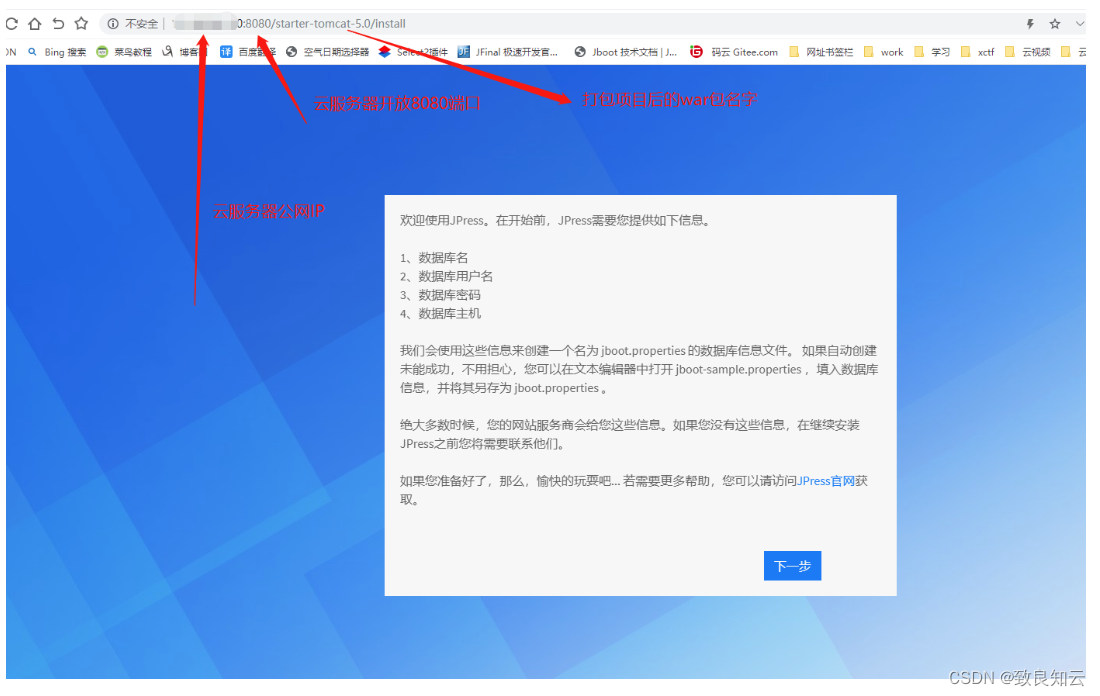
云服务器 CentOS7 操作系统上安装Jpress (Tomcat 部署项目)
1、xShell 和 xftp 下载安装(略) https://www.xshell.com/zh/free-for-home-school/2、xftp 连接云服务器 xftp 新建连接 3、JDK 压缩包下载 下载 jdk1.8 注:此处 CentOS7 是64位,所以下载的是:Linux x64…...
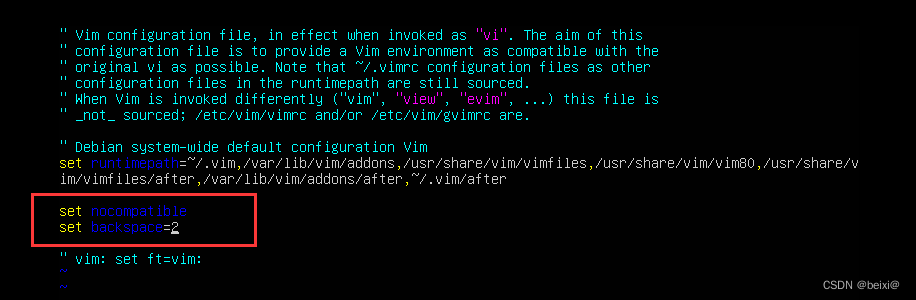
【Linux】完美解决ubuntu18.04下vi不能使用方向键和退格键
今天在刚安装完ubuntu18.04,发现在使用vi命令配置文件时使用方向键并不能移动光标,而是出现一堆奇怪的英文字母,使用退格键也不能正常地删除内容,用惯了CentOS的我已经感觉到ubuntu没有centos用着丝滑,但是没办法&…...
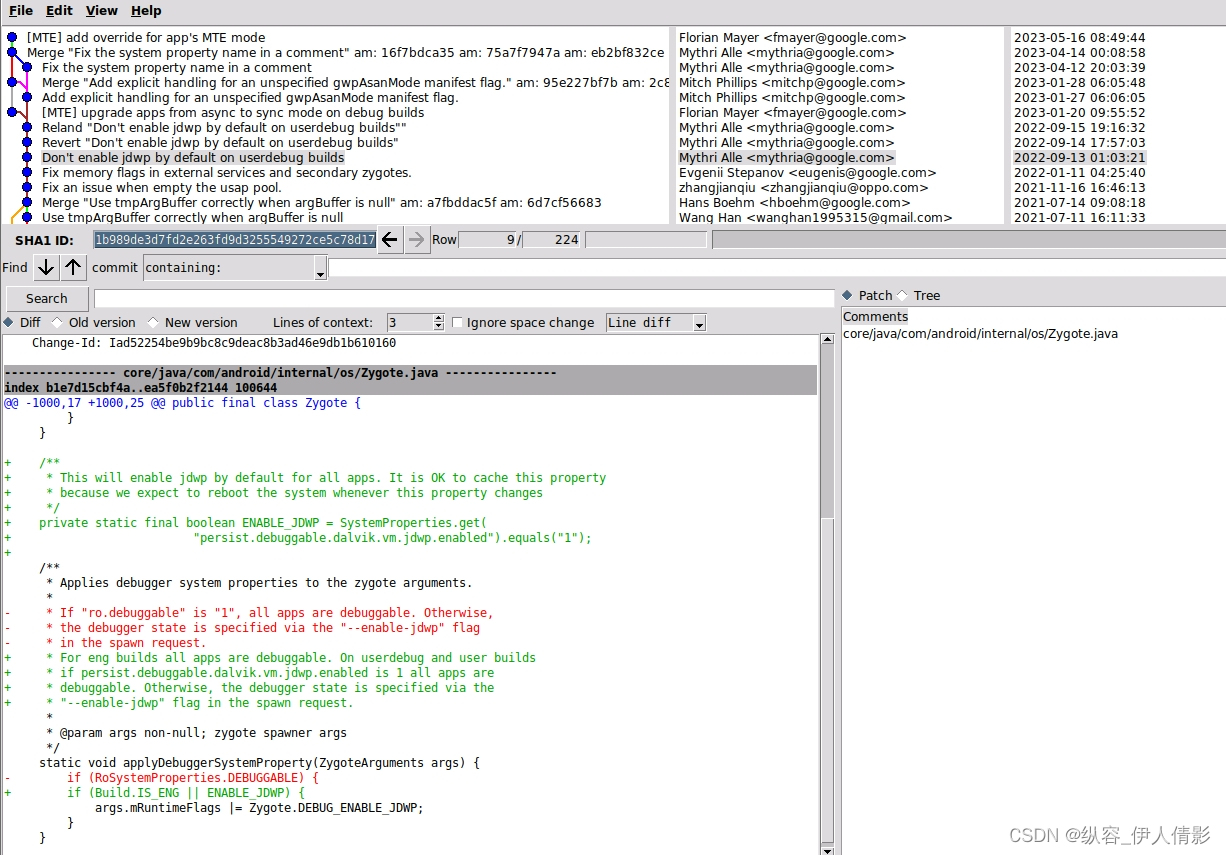
Android studio “Layout Inspector“工具在Android14 userdebug设备无法正常使用
背景描述 做rom开发的都知道,“Layout Inspector”和“Attach Debugger to Android Process”是studio里很好用的工具,可以用来查看布局、调试系统进程(比如setting、launcher、systemui)。 问题描述 最进刚开始一个Android 14…...
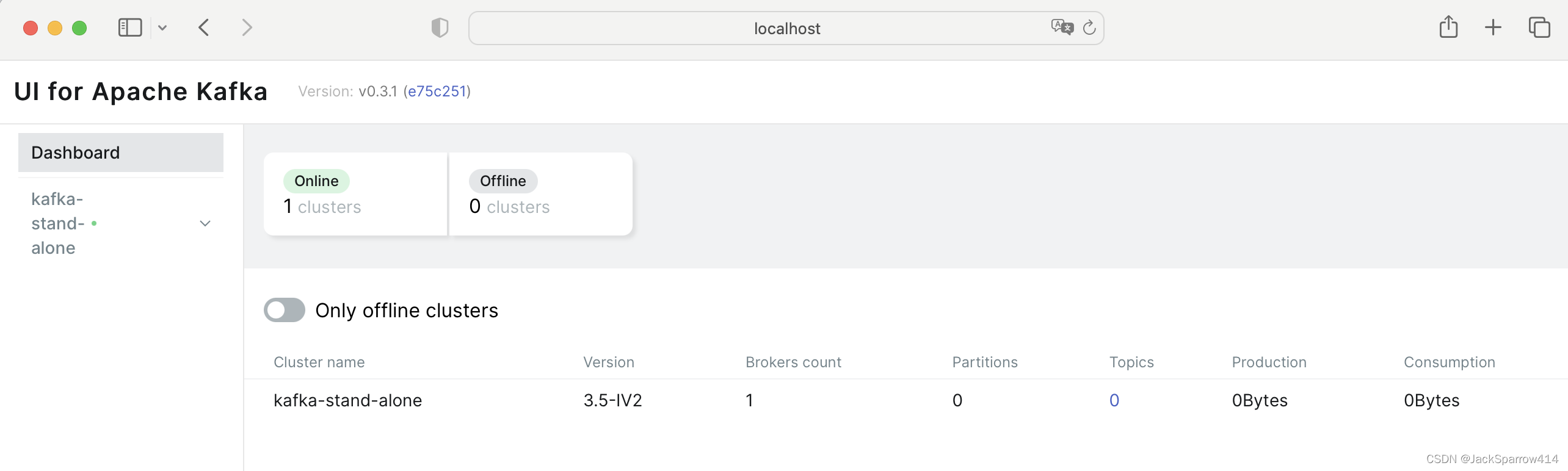
Kafka(一)使用Docker Compose安装单机Kafka以及Kafka UI
文章目录 Kafka中涉及到的术语Kafka镜像选择Kafka UI镜像选择Docker Compose文件Kafka配置项说明KRaft vs Zookeeper和KRaft有关的配置关于Controller和Broker的概念解释Listener的各种配置 Kafka UI配置项说明 测试Kafka集群Docker Compose示例配置 Kafka中涉及到的术语 对于…...

网络知识点之-MSTP平台
本文章已收录至《网络》专栏,点进右上角专栏图标可访问本专栏 多业务传送平台(MSTP)技术是指基于SDH平台,同时实现TDM、ATM、以太网等业务的接入、处理和传送,提供统一网管的多业务传送平台。 MSTP充分利用SDH技术,特别是保护恢复…...
Azure AD混合部署,通过 Intune 管理设备,实现条件访问
需求: 公司要求,非公司设备不允许使用 邮箱,Teams等O365服务。 我们可以通过 Intune 中的 "条件访问" 解决这个问题。 一、设备同步到 AAD 1、配置 AAD Connect 2、选择 3、下一步 4、配置本地 企业管理员 5、配置成功 二、设备…...

2023/09/30
1. 判断字符串中是否包含某个字符串的三种方法 三个方法都是String对象的实例方法 方法一:indexOf() let str "123" console.log(str.indexof(3) ! -1); // trueindefOf()方法可返回某个指定的字符串值在字符串首次出现的位置,如果要检索的…...

顶级人工智能会议接收率及信息
一、 自然语言处理与计算语言学 Conference Long Paper Short PaperACL1426.2% (146/572)26.1% (139/551)ACL1525.0% (173/692)22.4% (145/648)ACL1628.0% (231/825)21.0% (97/463)ACL1725.0% (195/751)18.9% (107/567)ACL1825.3% (258/1018)24.0% (126/526)ACL…...
NLP 01(介绍)
一、NLP 自然语言处理 (Natural Language rrocessing,简称NLP) 是计算机科学与语言学中关注于计算机与人类语言间转换的领域。 1.1 发展 规则:基于语法 自然语言处理的应用场景: 语音助手 机器翻译 搜索引擎 智能问答...

网页采集工具-免费的网页采集工具
在当今数字化时代,网页采集已经成为了众多领域的必备工具。无论是市场研究、竞争情报、学术研究还是内容创作,网页采集工具都扮演着不可或缺的角色。对于许多用户来说,寻找一个高效、免费且易于使用的网页采集工具太不容易了。 147SEO工具的强…...
【自监督Re-ID】ICCV_2023_Oral | ISR论文阅读
Codehttps://github.com/dcp15/ISR_%20ICCV2023_Oral 面向泛化行人再识别的身份导向自监督表征学习,清华大学 目录 导读 摘要 相关工作 DG ReID 用于ReID的合成数据 无监督表征学习 Identity-Seeking Representation Learning 结果 消融实验 导读 新角度…...
ElasticSearch 10000条查询数量限制
一、前言 我们将库存快照数据导入ES后发现要分页查询10000条以后的记录会报错,这是因为ES通过index.max_result_window这个参数控制能够获取数据总数fromsize最大值,默认限制是10000条,因为ES考虑到数据要从其它节点上报到协调节点如果搜索请…...
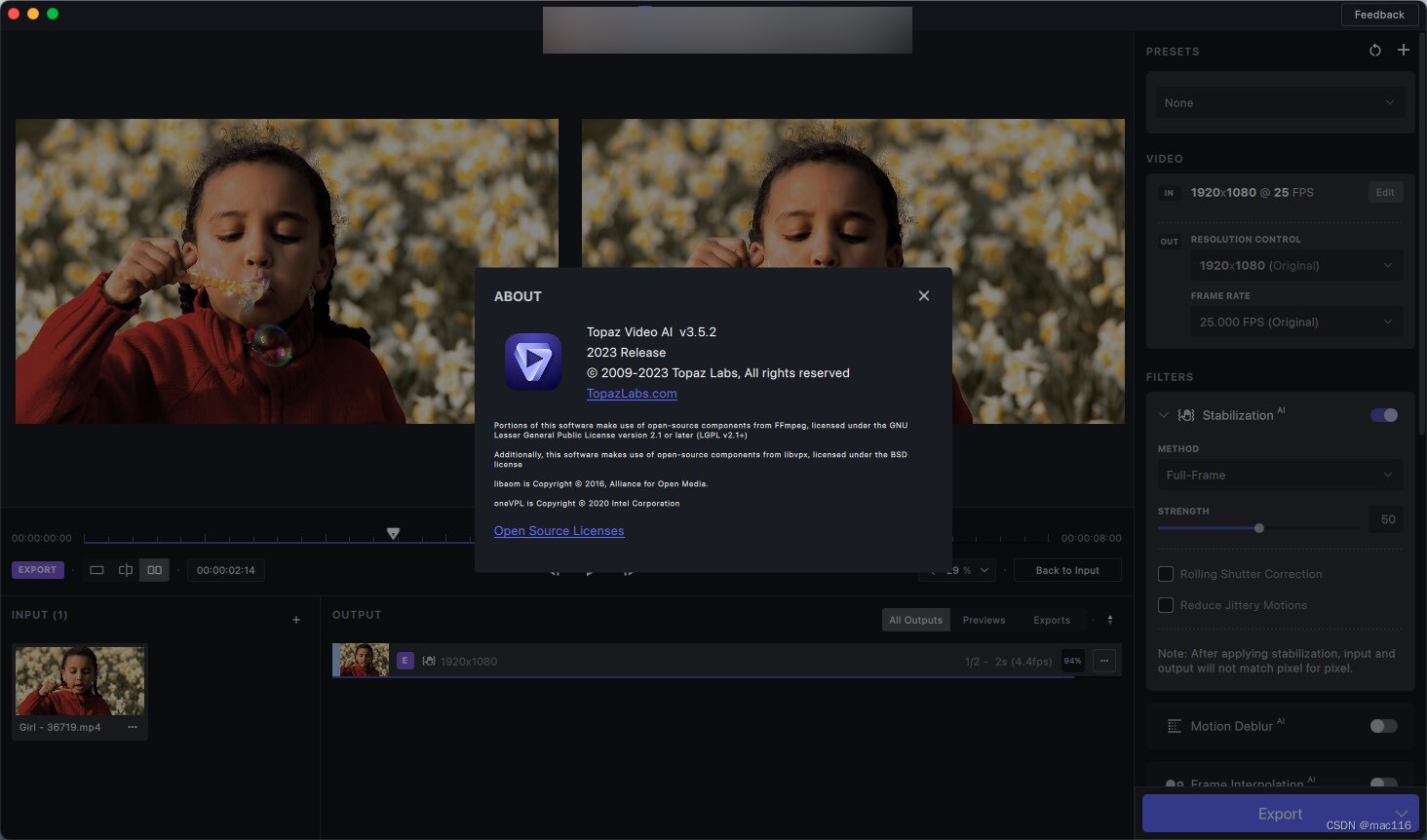
视频增强修复工具Topaz Video AI mac中文版安装教程
Topaz Video AI mac是一款使用人工智能技术对视频进行增强和修复的软件。它可以自动降噪、去除锐化、减少压缩失真、提高清晰度等等。Topaz Video AI可以处理各种类型的视频,包括低分辨率视频、老旧影片、手机录制的视频等等。 使用Topaz Video AI非常简单ÿ…...

【面试题精讲】Java自增自减运算符
❝ 有的时候博客内容会有变动,首发博客是最新的,其他博客地址可能会未同步,认准https://blog.zysicyj.top ❞ 首发博客地址[1] 面试题手册[2] 系列文章地址[3] 1. 什么是自增自减运算符? 自增自减运算符是一种用于对变量进行加 1 或减 1 操作的特殊运算…...

282_WEB_对于注册、数据data_callback中进行处理的理解
这段代码是一个 HTTP 服务器中处理请求的核心部分,涉及到路由和请求处理的逻辑。让我们逐行解析代码,同时理解其中涉及的关键概念和组件。 首先,你提供的代码有一些与 HTTP 请求和路由处理相关的部分,同时还有一些可能是从一个较大的代码基础中提取的片段,因此有些变量和…...

测试C#图像文本识别模块Tesseract的基本用法
微信公众号“dotNET跨平台”的文章《c#实现图片文体提取》(参考文献3)介绍了C#图像文本识别模块Tesseract,后者是tesseract-ocr(参考文献2) 的C#封装版本,目前版本为5.2,关于Tesseract的详细介绍…...

挑战杯推荐项目
“人工智能”创意赛 - 智能艺术创作助手:借助大模型技术,开发能根据用户输入的主题、风格等要求,生成绘画、音乐、文学作品等多种形式艺术创作灵感或初稿的应用,帮助艺术家和创意爱好者激发创意、提高创作效率。 - 个性化梦境…...

测试微信模版消息推送
进入“开发接口管理”--“公众平台测试账号”,无需申请公众账号、可在测试账号中体验并测试微信公众平台所有高级接口。 获取access_token: 自定义模版消息: 关注测试号:扫二维码关注测试号。 发送模版消息: import requests da…...

FFmpeg 低延迟同屏方案
引言 在实时互动需求激增的当下,无论是在线教育中的师生同屏演示、远程办公的屏幕共享协作,还是游戏直播的画面实时传输,低延迟同屏已成为保障用户体验的核心指标。FFmpeg 作为一款功能强大的多媒体框架,凭借其灵活的编解码、数据…...
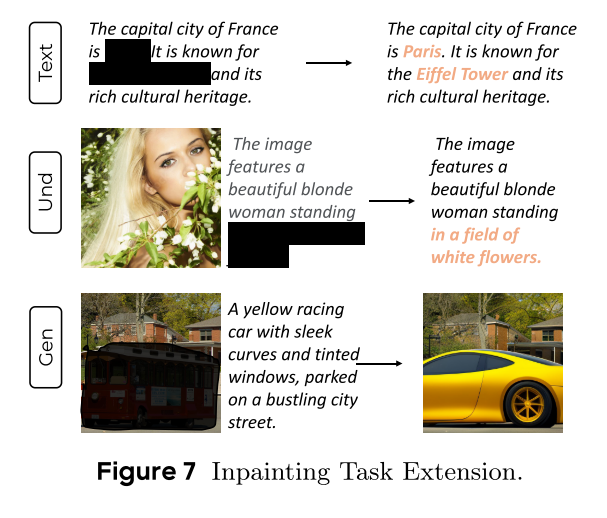
MMaDA: Multimodal Large Diffusion Language Models
CODE : https://github.com/Gen-Verse/MMaDA Abstract 我们介绍了一种新型的多模态扩散基础模型MMaDA,它被设计用于在文本推理、多模态理解和文本到图像生成等不同领域实现卓越的性能。该方法的特点是三个关键创新:(i) MMaDA采用统一的扩散架构…...
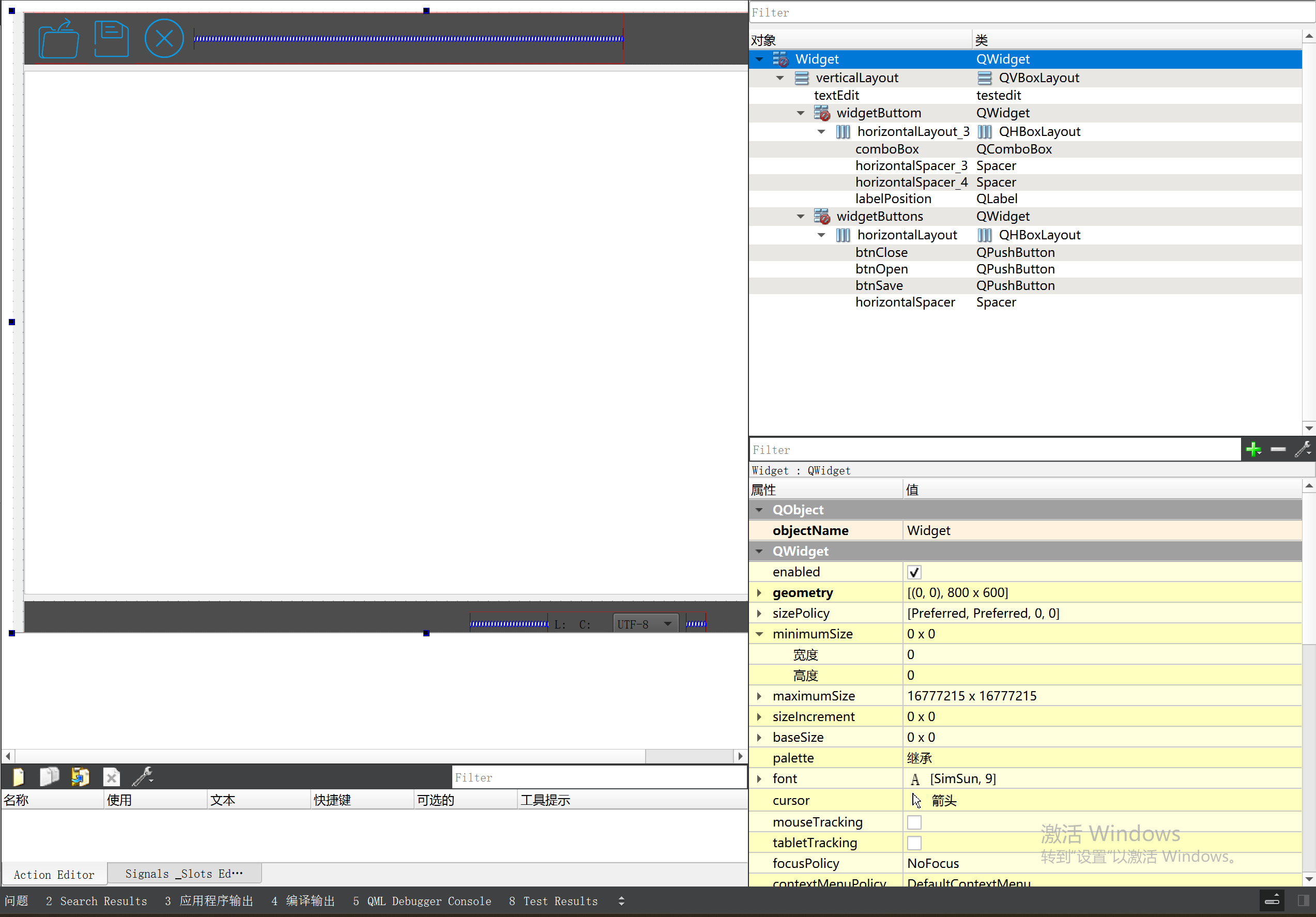
P3 QT项目----记事本(3.8)
3.8 记事本项目总结 项目源码 1.main.cpp #include "widget.h" #include <QApplication> int main(int argc, char *argv[]) {QApplication a(argc, argv);Widget w;w.show();return a.exec(); } 2.widget.cpp #include "widget.h" #include &q…...
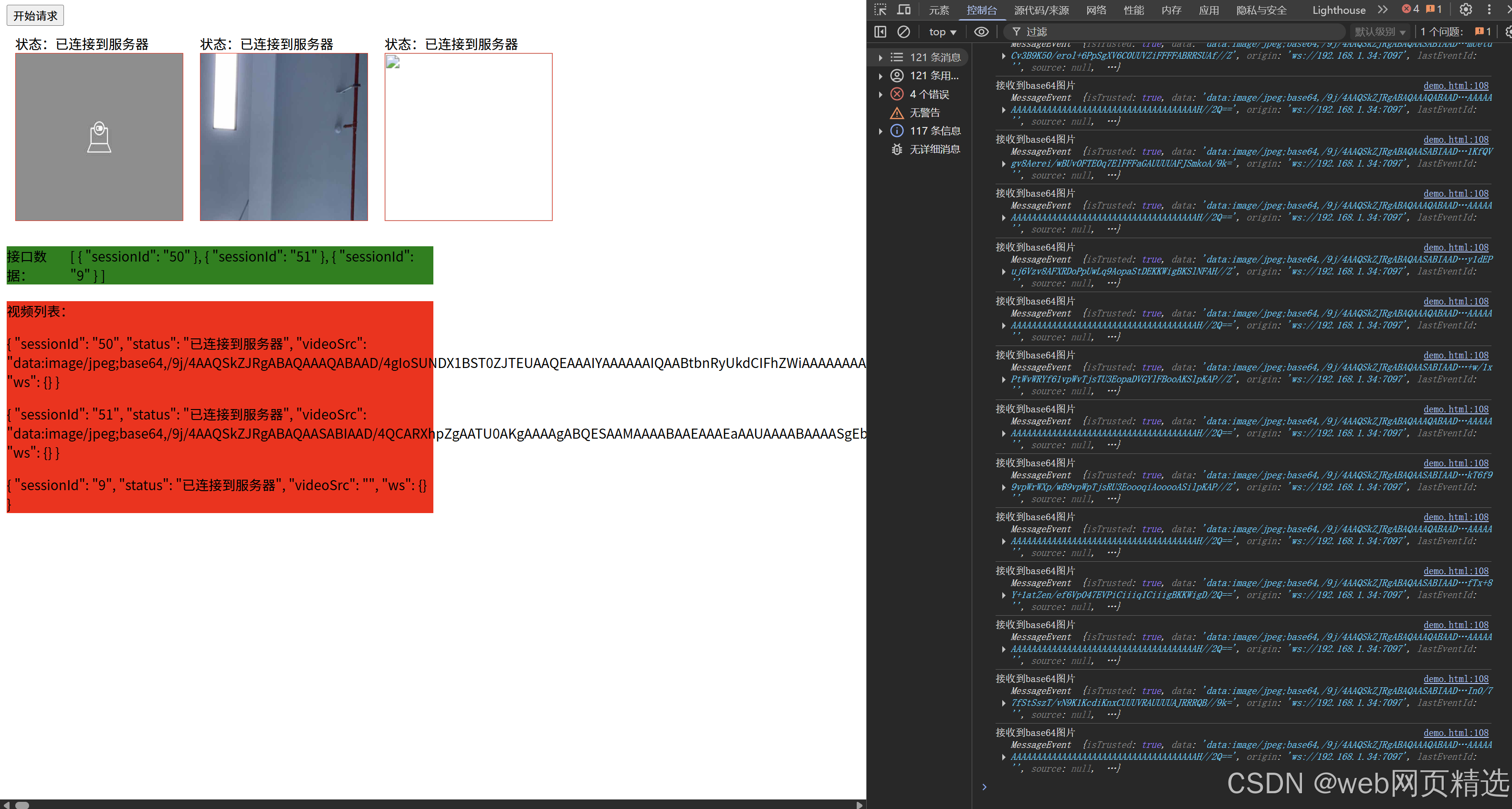
uniapp微信小程序视频实时流+pc端预览方案
方案类型技术实现是否免费优点缺点适用场景延迟范围开发复杂度WebSocket图片帧定时拍照Base64传输✅ 完全免费无需服务器 纯前端实现高延迟高流量 帧率极低个人demo测试 超低频监控500ms-2s⭐⭐RTMP推流TRTC/即构SDK推流❌ 付费方案 (部分有免费额度&#x…...

华硕a豆14 Air香氛版,美学与科技的馨香融合
在快节奏的现代生活中,我们渴望一个能激发创想、愉悦感官的工作与生活伙伴,它不仅是冰冷的科技工具,更能触动我们内心深处的细腻情感。正是在这样的期许下,华硕a豆14 Air香氛版翩然而至,它以一种前所未有的方式&#x…...

站群服务器的应用场景都有哪些?
站群服务器主要是为了多个网站的托管和管理所设计的,可以通过集中管理和高效资源的分配,来支持多个独立的网站同时运行,让每一个网站都可以分配到独立的IP地址,避免出现IP关联的风险,用户还可以通过控制面板进行管理功…...
给网站添加live2d看板娘
给网站添加live2d看板娘 参考文献: stevenjoezhang/live2d-widget: 把萌萌哒的看板娘抱回家 (ノ≧∇≦)ノ | Live2D widget for web platformEikanya/Live2d-model: Live2d model collectionzenghongtu/live2d-model-assets 前言 网站环境如下,文章也主…...

全面解析数据库:从基础概念到前沿应用
在数字化时代,数据已成为企业和社会发展的核心资产,而数据库作为存储、管理和处理数据的关键工具,在各个领域发挥着举足轻重的作用。从电商平台的商品信息管理,到社交网络的用户数据存储,再到金融行业的交易记录处理&a…...