使用libmodbus库开发modbusTcp从站(支持多个主站连接)
使用libmodbus库开发modbusTcp从站(支持多个主站连接)
- Chapter1 使用libmodbus库开发modbusTcp从站(支持多个主站连接)
- rdsmodbusslave.h
- rdsmodbusslave.cpp
- main.cpp
Chapter1 使用libmodbus库开发modbusTcp从站(支持多个主站连接)
参考链接:https://blog.csdn.net/v6543210/article/details/127426450
https://blog.csdn.net/qq_38158479/article/details/120928043
当我们需要自己搞一个C/C++版的 modbus Server时,总想像C#里面借助个好用的库来实现,但是libmodbus这个库封装的并不好用,从官方的源码中连个example都没有,能参考的也就tests目录下有几个可以借鉴。
但是仔细看了一下,random-test-server.c 还是会阻塞的,单线程。与拿来即用的标准相差甚远。
如果需要实现对多个客户端提供服务,需要参考 bandwidth-server-many-up.c
本文借鉴这篇文章,进行了一点优化,实现了可以为多个客户端提供服务的modbus tcp Server,可以拿来即用。
使用libmodbus库开发modbusTcp从站(支持多个主站连接)_酸菜。的博客-CSDN博客_libmodbus tcp
如果需要自己实现逻辑可以直接在另一个线程函数中对modbus的变量进行修改。
rdsmodbusslave.h
#ifndef RDSMODBUSSLAVE_H
#define RDSMODBUSSLAVE_H#include <iostream>
#include <thread>
#include <stdlib.h>
#include <iostream>
#include <mutex>
#include <string>
using namespace std;
/*如果是windows平台则要加载相应的静态库和头文件*/
#ifdef _WIN32
#define _WINSOCK_DEPRECATED_NO_WARNINGS
#include <winsock2.h>
#include <windows.h>
//#include <modbus.h>
#pragma comment(lib, "Ws2_32.lib")
//#pragma comment(lib, "modbus.lib")
/*linux平台*/
#else
//#include <modbus/modbus.h>
#include <unistd.h>
#include <error.h>
#include <arpa/inet.h>
#include <sys/socket.h>
#include <sys/time.h>
#include <sys/select.h>
#endif//#define MAX_POINT 50000
#include <QObject>
#include <QThread>
#include <stdio.h>
#include <libmodbus/config.h>
#include <libmodbus/modbus.h>
#include <libmodbus/modbus-rtu.h>
#include <QTimer>
#include <QDebug>
#include <QStringList>
#include <QSerialPortInfo>
#include <QSerialPort>class RDSModbusSlave : public QObject
{Q_OBJECT
public:explicit RDSModbusSlave(QObject *parent = nullptr);RDSModbusSlave(string host="0.0.0.0", uint16_t port=502);~RDSModbusSlave();public:void recieveMessages();bool modbus_set_slave_id(int id);bool initModbus(std::string Host_Ip, int port, bool debugging);uint8_t getTab_Input_Bits(int NumBit);bool setTab_Input_Bits(int NumBit, uint8_t Value);uint16_t getHoldingRegisterValue(int registerStartaddress);float getHoldingRegisterFloatValue(int registerStartaddress);bool setHoldingRegisterValue(int registerStartaddress, uint16_t Value);bool setHoldingRegisterValue(int registerStartaddress, float Value);bool setInputRegisterValue(int registerStartaddress, uint16_t Value);bool setInputRegisterValue(int registerStartaddress, float Value);private:std::mutex slavemutex;int m_errCount{ 0 };int m_modbusSocket{ -1 };bool m_initialized{ false };modbus_t* ctx{ nullptr };modbus_mapping_t* mapping{ nullptr };/*Mapping*/int m_numBits{ 60000 };int m_numInputBits{ 60000 };int m_numRegisters{ 60000 };int m_numInputRegisters{ 60000 };public:void loadFromConfigFile();void run();signals:};/*annotation:
(1)https://www.jianshu.com/p/0ed380fa39eb
(2)typedef struct _modbus_mapping_t
{int nb_bits; //线圈int start_bits;int nb_input_bits; //离散输入int start_input_bits;int nb_input_registers; //输入寄存器int start_input_registers;int nb_registers; //保持寄存器int start_registers;uint8_t *tab_bits;uint8_t *tab_input_bits;uint16_t *tab_input_registers;uint16_t *tab_registers;
}modbus_mapping_t;*/#endif // RDSMODBUSSLAVE_Hrdsmodbusslave.cpp
#include "rdsmodbusslave.h"#ifdef _WIN32
typedef int socklen_t;
#endifRDSModbusSlave::RDSModbusSlave(QObject *parent) : QObject(parent)
{}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief Constructor* @version v1* @return null* @date 2021/10/6**************************************************************/
RDSModbusSlave::RDSModbusSlave(string host, uint16_t port)
{initModbus(host, port, false);//TODO:this->setHoldingRegisterValue(0, (uint16_t)0x1122);this->setHoldingRegisterValue(3, (uint16_t)0x3022);this->setHoldingRegisterValue(6, (uint16_t)0x6022);
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief Destructor* @version v1* @return null* @date 2021/10/6**************************************************************/
RDSModbusSlave::~RDSModbusSlave()
{modbus_mapping_free(mapping);modbus_close(ctx);modbus_free(ctx);
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief 支持多个master同时连接* @version v1* @return null* @date 2021/10/6**************************************************************/
void RDSModbusSlave::recieveMessages()
{uint8_t query[MODBUS_TCP_MAX_ADU_LENGTH];int master_socket;int rc;fd_set refset;fd_set rdset;/* Maximum file descriptor number */int fdmax;/* Clear the reference set of socket */FD_ZERO(&refset);/* Add the server socket */FD_SET(m_modbusSocket, &refset);/* Keep track of the max file descriptor */fdmax = m_modbusSocket;while( true ){rdset = refset;if (select(fdmax+1, &rdset, NULL, NULL, NULL) == -1){perror("Server select() failure.");break;}/* Run through the existing connections looking for data to be* read */for (master_socket = 0; master_socket <= fdmax; master_socket++){if (!FD_ISSET(master_socket, &rdset)){continue;}if (master_socket == m_modbusSocket){/* A client is asking a new connection */socklen_t addrlen;struct sockaddr_in clientaddr;int newfd;/* Handle new connections */addrlen = sizeof(clientaddr);memset(&clientaddr, 0, sizeof(clientaddr));newfd = accept(m_modbusSocket, (struct sockaddr *)&clientaddr, &addrlen);if (newfd == -1){perror("Server accept() error");} else{FD_SET(newfd, &refset);if (newfd > fdmax){/* Keep track of the maximum */fdmax = newfd;}printf("New connection from %s:%d on socket %d\n", inet_ntoa(clientaddr.sin_addr), clientaddr.sin_port, newfd);}} else{modbus_set_socket(ctx, master_socket);rc = modbus_receive(ctx, query);if (rc > 0){modbus_reply(ctx, query, rc, mapping);} else if (rc == -1){/* This example server in ended on connection closing or* any errors. */printf("Connection closed on socket %d\n", master_socket);#ifdef _WIN32closesocket(master_socket);#elseclose(master_socket);#endif/* Remove from reference set */FD_CLR(master_socket, &refset);if (master_socket == fdmax){fdmax--;}}}}}m_initialized = false;
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief modbus_set_slave_id* @param id* @version v1* @return null* @date 2021/10/19**************************************************************/
bool RDSModbusSlave::modbus_set_slave_id(int id)
{int rc = modbus_set_slave(ctx, id);if (rc == -1){fprintf(stderr, "Invalid slave id\n");modbus_free(ctx);return false;}return true;
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief modbus initialization* @param IP/PORT/debugflag* @version v1* @return null* @date 2021/10/6**************************************************************/
bool RDSModbusSlave::initModbus(std::string Host_Ip = "127.0.0.1", int port = 502, bool debugging = false)
{ctx = modbus_new_tcp(Host_Ip.c_str(), port);modbus_set_debug(ctx, debugging);if (ctx == NULL){fprintf(stderr, "There was an error allocating the modbus\n");throw - 1;}m_modbusSocket = modbus_tcp_listen(ctx, 1);/*设置线圈, 离散输入, 输入寄存器, 保持寄存器个数(数组元素个数))*/mapping = modbus_mapping_new(m_numBits, m_numInputBits, m_numInputRegisters, m_numRegisters);if (mapping == NULL){fprintf(stderr, "Unable to assign mapping:%s\n", modbus_strerror(errno));modbus_free(ctx);m_initialized = false;return false;}m_initialized = true;return true;
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief getTab_Input_Bits(获取输入寄存器某一位的值)* @param NumBit(输入寄存器相应的bit位)* @version v1* @return null* @date 2021/10/8**************************************************************/
uint8_t RDSModbusSlave::getTab_Input_Bits(int NumBit)
{if (!m_initialized){return -1;}return mapping->tab_input_bits[NumBit];
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief setTab_Input_Bits(设置输入寄存器某一位的值)* @param NumBit(输入寄存器的起始地址)* @param Value(输入寄存器的值)* @version v1* @return null* @date 2021/10/8**************************************************************/
bool RDSModbusSlave::setTab_Input_Bits(int NumBit, uint8_t Value)
{if (NumBit > (m_numInputBits - 1)){return false;}slavemutex.lock();mapping->tab_input_bits[NumBit] = Value;slavemutex.unlock();return true;
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief getRegisterValue(获取保存寄存器的值)* @param registerStartaddress(保存寄存器的起始地址)* @version v1* @return null* @date 2021/10/6**************************************************************/
uint16_t RDSModbusSlave::getHoldingRegisterValue(int registerStartaddress)
{if (!m_initialized){return -1;}return mapping->tab_registers[registerStartaddress];
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief 获取寄存器里的浮点数* @param registerStartaddress寄存器起始地址* @version v1* @return 两个uint16_t拼接而成的浮点值* @date 2021/10/6**************************************************************/
float RDSModbusSlave::getHoldingRegisterFloatValue(int registerStartaddress)
{if (!m_initialized){return -1.0f;}return modbus_get_float_badc(&mapping->tab_registers[registerStartaddress]);
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief setRegisterValue(设置保存寄存器的值,类型为uint16_t)* @param registerStartaddress(保存寄存器的起始地址)* @param Value(写入到保存寄存器里的值)* @version v1* @return null* @date 2021/10/6**************************************************************/
bool RDSModbusSlave::setHoldingRegisterValue(int registerStartaddress, uint16_t Value)
{if (registerStartaddress > (m_numRegisters - 1)){return false;}slavemutex.lock();mapping->tab_registers[registerStartaddress] = Value;slavemutex.unlock();return true;
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief setRegisterFloatValue(设置浮点值)* @param (Value:浮点值,registerStartaddress寄存器起始地址)* @version v1* @return null* @date 2021/10/8**************************************************************/
bool RDSModbusSlave::setHoldingRegisterValue(int registerStartaddress, float Value)
{if (registerStartaddress > (m_numRegisters - 2)){return false;}/*小端模式*/slavemutex.lock();modbus_set_float(Value, &mapping->tab_registers[registerStartaddress]);slavemutex.unlock();return true;
}bool RDSModbusSlave::setInputRegisterValue(int registerStartaddress, uint16_t Value)
{if (registerStartaddress > (m_numRegisters - 1)){return false;}slavemutex.lock();mapping->tab_input_registers[registerStartaddress] = Value;slavemutex.unlock();return true;
}bool RDSModbusSlave::setInputRegisterValue(int registerStartaddress, float Value)
{if (registerStartaddress > (m_numRegisters - 2)){return false;}/*小端模式*/slavemutex.lock();modbus_set_float(Value, &mapping->tab_input_registers[registerStartaddress]);slavemutex.unlock();return true;
}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief loadFromConfigFile* @version v1* @return null* @date 2021/10/18**************************************************************/
void RDSModbusSlave::loadFromConfigFile()
{}/**************************************************************** @file RDSModbusSlave.cpp* @author seer-txj* @brief run* @version v1* @return null* @date 2021/10/18**************************************************************/
void RDSModbusSlave::run()
{std::thread loop([this](){while (true){if (m_initialized){recieveMessages();}else{m_initialized = true;}}});loop.detach();return;
}main.cpp
#include "mainwindow.h"#include <QApplication>//#include "rdsmodbusslave.h"using namespace std;void modbusRunner(RDSModbusSlave* server)
{server->recieveMessages();
}RDSModbusSlave modServer("127.0.0.1", 502);int main(int argc, char *argv[])
{QApplication a(argc, argv);MainWindow w;w.show();std::thread modServerThread(modbusRunner, &modServer);modServerThread.join();return a.exec();
}相关文章:
)
使用libmodbus库开发modbusTcp从站(支持多个主站连接)
使用libmodbus库开发modbusTcp从站(支持多个主站连接) Chapter1 使用libmodbus库开发modbusTcp从站(支持多个主站连接)rdsmodbusslave.hrdsmodbusslave.cppmain.cpp Chapter1 使用libmodbus库开发modbusTcp从站(支持多个主站连接) 参考链接:…...
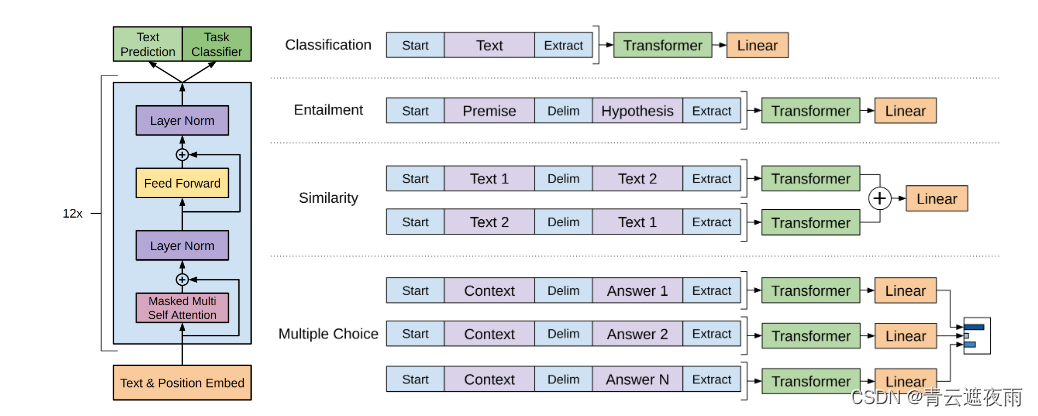
GPT系列论文解读:GPT-2
GPT系列 GPT(Generative Pre-trained Transformer)是一系列基于Transformer架构的预训练语言模型,由OpenAI开发。以下是GPT系列的主要模型: GPT:GPT-1是于2018年发布的第一个版本,它使用了12个Transformer…...
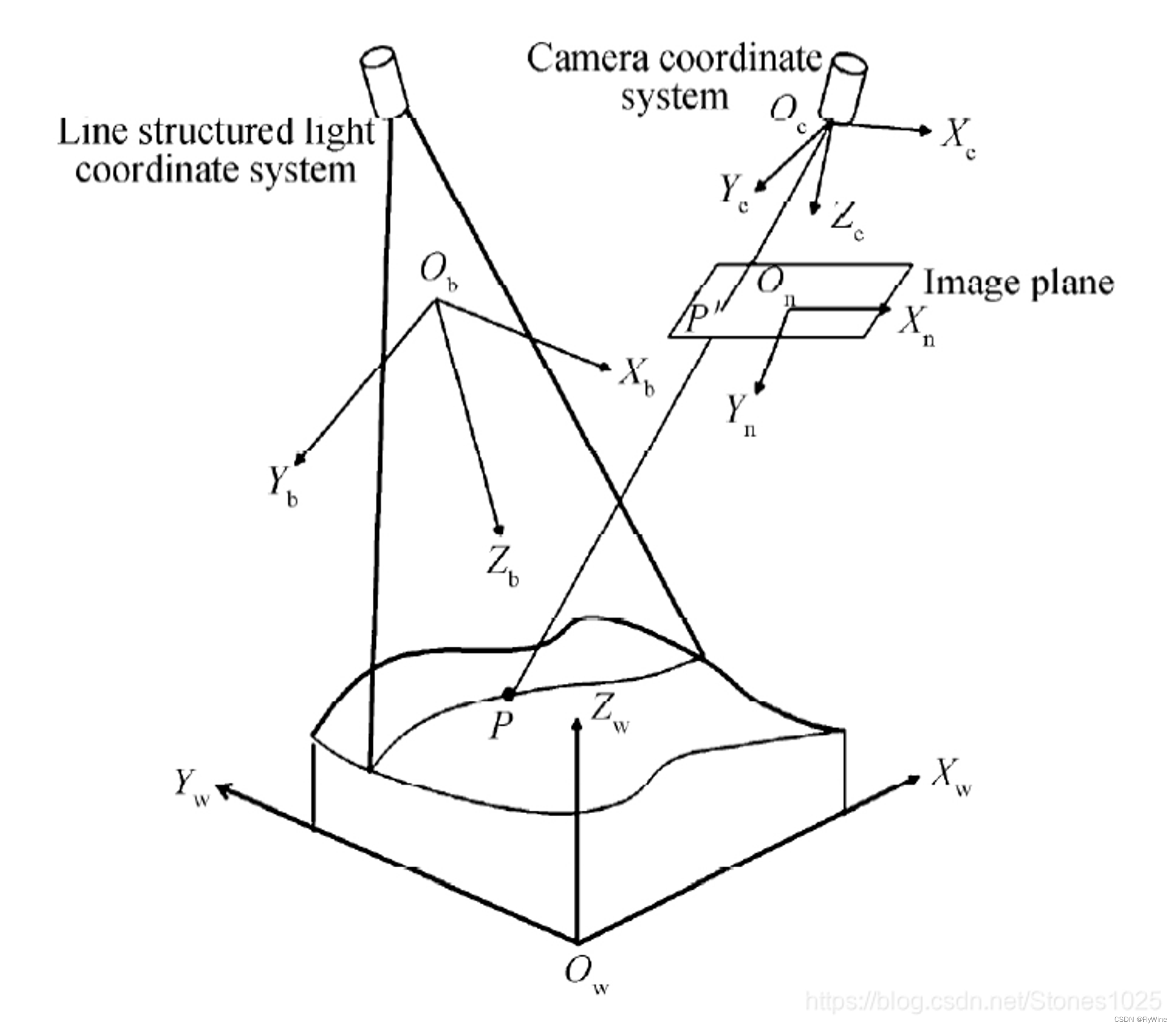
(四)激光线扫描-光平面标定
在上一章节,已经实现了对激光线条的中心线提取,并且在最开始已经实现了对相机的标定,那么相机标定的作用是什么呢? 就是将图像二维点和空间三维点之间进行互相转换。 1. 什么是光平面 激光发射器投射出一条线,形成的一个扇形区域平面就是光平面,也叫光刀面,与物体相交…...
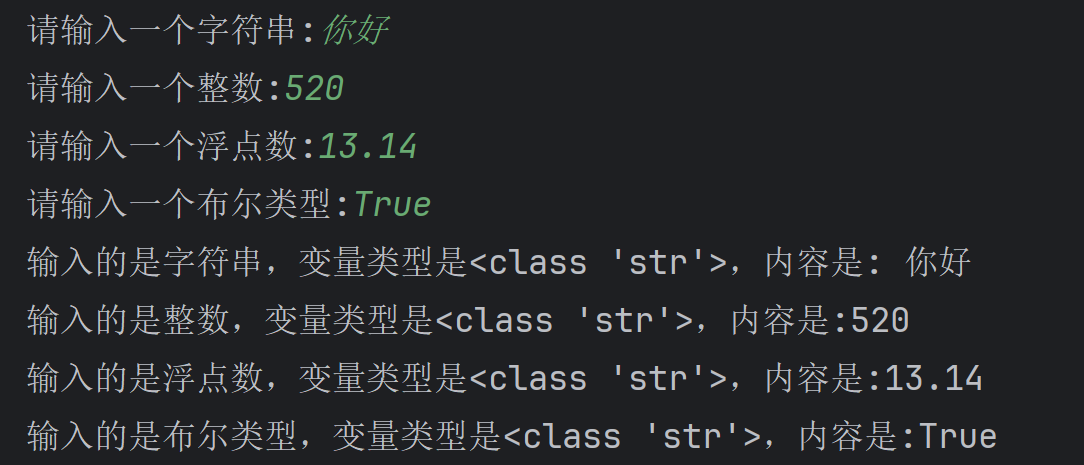
妙不可言的Python之旅----(二)
Python基础语法 什么是字面量 字面量:在代码中,被写下来的的固定的值,称之为字面量 常用的值类型 类型 描述 说明 数字(Number) 支持 • 整数(int) • 浮点数(floatÿ…...

cartographer(1)-运行
1.下载数据集 #1.下载数据集: mkdir /home/tang/bagfiles#2.开始二维建图 cd /home/tang/carto_ws/cartographer_detailed_comments_ws/install_isolated/source install_isolated/setup.bash rospack profile #新装的包索引地址存在ros的环境里 roslaunch ca…...
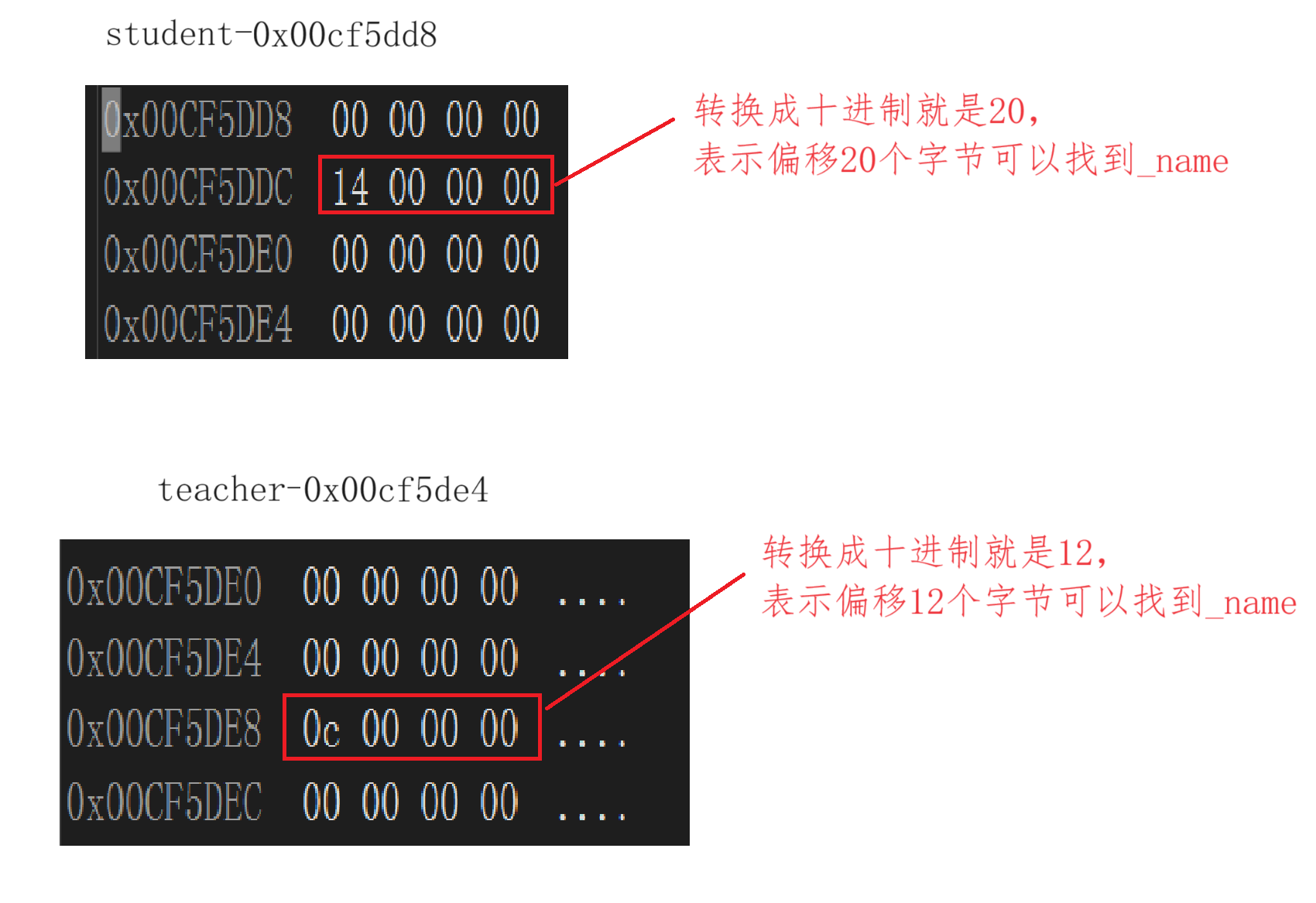
C++:模板进阶与继承
模板进阶与继承 模板进阶1.非类型的模板参数2.模板的特化2.1特化的概念2.2函数模板特化2.3类模板特化2.4全特化和偏特化2.4.1全特化2.4.2偏特化 3.模板的分离编译3.1同文件分离3.2不同文件下分离 继承1.继承的概念和定义1.1继承的概念1.2继承的定义1.2.1定义格式1.2.2继承关系和…...

vue-img-cutter 实现图片裁剪[vue 组件库]
借助 vue-img-cutter 可以在网页端实现图片裁剪功能,最终功能效果如下: 组件 npm 安装 npm install vue-img-cutter2 --save-dev # for vue2 npm install vue-img-cutter3 --save-dev # for vue3vue-img-cutter使用 template模板标签模块,…...

手把手教你从零开始腾讯云服务器部署(连接建站教程)
使用腾讯云服务器搭建网站全流程,包括轻量应用服务器和云服务器CVM建站教程,轻量可以使用应用镜像一键建站,云服务器CVM可以通过安装宝塔面板的方式来搭建网站,腾讯云服务器网txyfwq.com分享使用腾讯云服务器建站教程,…...
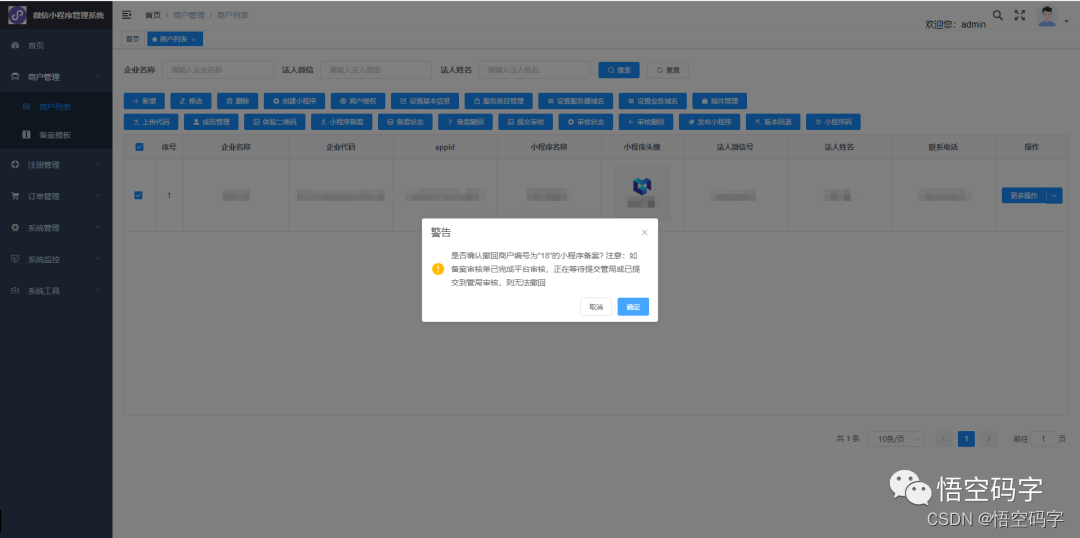
微信开放平台第三方开发,实现代小程序备案申请
大家好,我是小悟 微信小程序备案整体流程总共分为五个环节:备案信息填写、平台初审、工信部短信核验、通管局审核和备案成功。 服务商可以代小程序发起备案申请。在申请小程序备案之前,需要确保小程序基本信息已填写完成、小程序至少存在一个…...

设计模式——11. 享元模式
1. 说明 享元模式(Flyweight Pattern)是一种结构型设计模式,它旨在减少系统中相似对象的内存占用或计算开销,通过共享相同的对象来达到节省资源的目的。 享元模式的核心思想是将对象的状态分为内部状态(Intrinsic State)和外部状态(Extrinsic State): 内部状态是对象…...
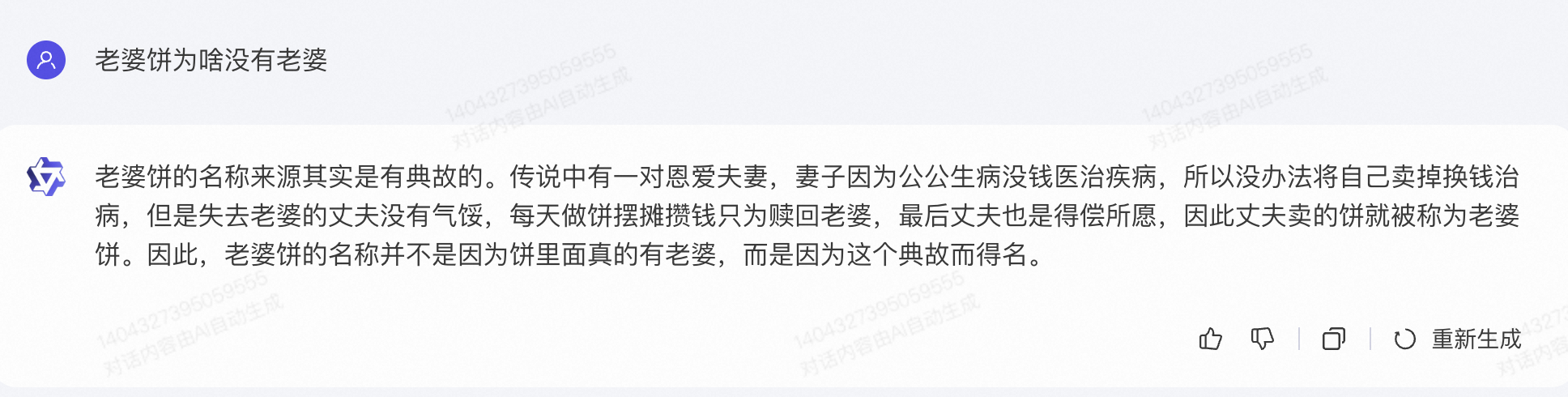
【LLM】主流大模型体验(文心一言 科大讯飞 字节豆包 百川 阿里通义千问 商汤商量)
note 智谱AI体验百度文心一言体验科大讯飞大模型体验字节豆包百川智能大模型阿里通义千问商汤商量简要分析:仅从测试“老婆饼为啥没有老婆”这个问题的结果来看,chatglm分点作答有条理(但第三点略有逻辑问题);字节豆包…...
CSS小计
1:设置图片随窗缩放 使用百分比 width: 100%;height: 100%; 使用vmin: 将可视区域分为100vmin width: 100vmin;height: 100vmin; 2:设置字体颜色与背景色融合 mix-blend-mode: difference 3: 设置宽度自适应 width:fit-content 4:外边距合并 当两个相领的两个容…...
机器学习:决策树
决策树 决策树是一种基于树形结构的模型,决策树从根节点开始,一步步走到叶子节点(决策),所有的数据最终都会落到叶子节点,既可以做分类也可以做回归。 特征选择 根节点的选择该用哪一个特征呢ÿ…...
xxl-job的原理(2)—调度中心管理注册信息
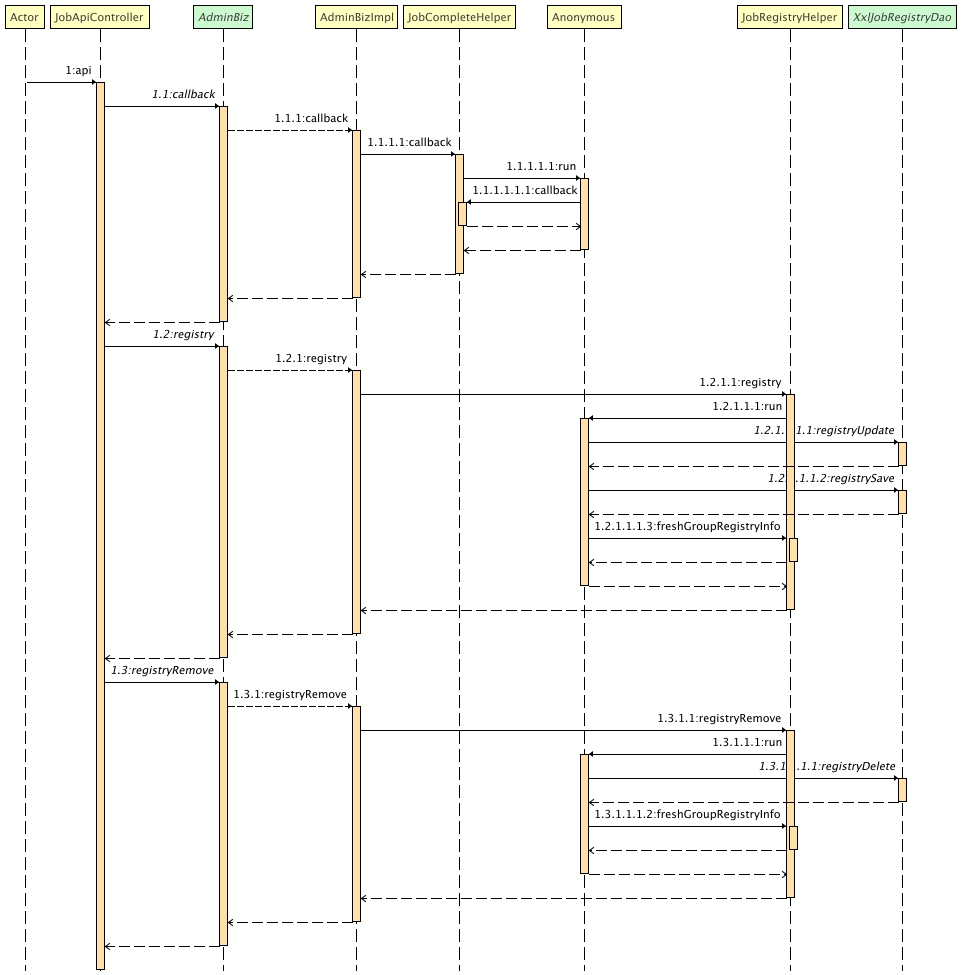
一、调度中心管理注册信息 1.JobApiController 执行器调用调度中心的url来实现注册、下线、回调等操作;其主要的实现类是JobApiController,调用/api/registry接口注册执行器信息,调用/api/registryRemove接口下线执行器信息,调用…...
----神经网络)
小白入门pytorch(二)----神经网络
本文为🔗[小白入门Pytorch]学习记录博客 文章目录 前言一、神经网络的组成部分1.神经元2.神经网络层3.损失函数4.优化器 二、Pytorch构建神经网络中的网络层全连接层2.卷积层3.池化层4.循环神经网络5.转置卷积层6.归一化层7.激活函数层 三、数据加载与预处理1.数据加…...

【进阶C语言】排序函数(qsort)与模拟实现(回调函数的实例)
本章大致内容目录: 1.认识回调函数 2.排序函数qsort 3.模拟实现qsort 回调函数为C语言重要知识点,以函数指针为主要知识;下面介绍回调函数的定义、回调函数的库函数举例即库函数模拟实现。 一、回调函数 1.回调函数定义 回调函数就是一…...

CentOS 7 上编译和安装 SQLite 3.9.0
文章目录 可能报错分析详细安装过程 可能报错分析 报错如下: django.core.exceptions.ImproperlyConfigured: SQLite 3.9.0 or later is required (found 3.7.17). 原因:版本为3.7.太低了,需要升级到3.9.0至少 详细安装过程 1.安装所需的…...

[GXYCTF2019]禁止套娃 无回显 RCE 过滤__FILE__ dirname等
扫除git 通过githack 获取index.php <?php include "flag.php"; echo "flag在哪里呢?<br>"; if(isset($_GET[exp])){if (!preg_match(/data:\/\/|filter:\/\/|php:\/\/|phar:\/\//i, $_GET[exp])) {if(; preg_replace(/[a-z,_]\(…...

Springboot使用Aop保存接口请求日志到mysql
1、添加aop依赖 <!-- aop日志 --><dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-aop</artifactId></dependency> 2、新建接口保存数据库的实体类RequestLog.java package com.example…...
网络安全面试题汇总(附答案)
作为从业多年的网络安全工程师,我深知在面试过程中面试官所关注的重点及考察的技能点。网络安全作为当前信息技术领域中非常重要的一部分,对于每一个从事网络安全工作的人员来说,不仅需要掌握一定的技术能力,更需要具备全面的综合…...
)
别再为测试视频发愁了!手把手教你用FFmpeg生成YUV/RGB原始数据(附播放命令)
音视频开发实战:FFmpeg高效生成与播放YUV/RGB测试素材指南 在音视频编解码器开发、计算机视觉算法测试或多媒体性能调优过程中,开发者经常面临一个共同难题:如何快速获取特定像素格式的原始视频数据作为测试素材?网上现成的YUV或R…...

深度解析Lenovo Legion Toolkit:轻量级硬件控制框架的技术实现与实践指南
深度解析Lenovo Legion Toolkit:轻量级硬件控制框架的技术实现与实践指南 【免费下载链接】LenovoLegionToolkit Lightweight Lenovo Vantage and Hotkeys replacement for Lenovo Legion laptops. 项目地址: https://gitcode.com/gh_mirrors/le/LenovoLegionTool…...

从0开始详解网络安全自学全流程!附对应的视频教程和学习笔记
从0开始详解网络安全自学全流程!附对应的视频教程和学习笔记 今天给大家梳理了从0开始详解网络安全自学全流程!对应的视频教程和学习笔记也都整理好了,大家去文末自取就行。 第一步:刑法 为什么学:划清合法与违法的红…...
)
2023B卷,跳格子(1)
👨⚕️ 主页: gis分享者 👨⚕️ 感谢各位大佬 点赞👍 收藏⭐ 留言📝 加关注✅! 👨⚕️ 收录于专栏:华为OD面试 文章目录 一、🍀前言 1.1 ☘️题目详情 1.2 ☘️参考解题答案 一、🍀前言 2023B卷,跳格子(1) 。 1.1 ☘️题目详情 题目: 小明和朋友…...
)
Overleaf实战:手把手教你用LaTeX制作符合A4排版要求的跨页长表格(含完整代码)
Overleaf实战:LaTeX跨页长表格的终极解决方案 当你正在撰写一篇包含大量数据的学术论文或技术手册时,那些横跨多页的表格往往会成为格式噩梦。表格在页面底部被生硬截断,表头在后续页面消失,页码引用混乱——这些问题不仅影响阅读…...

加热套、半导体加热带、工业加热夹克是同一种东西吗?
首先明确这个答案是肯定的,,这三种名称指同一种产品。作为北京龙腾圣华(LOTUSANA)的技术人员,我常被客户问到这个问题。我司自2002 年成立之初便自主研发投产此类柔性温控产品,最早行我们定名为加热套&…...

TPFanCtrl2:ThinkPad智能风扇控制终极指南,彻底解决过热与噪音问题
TPFanCtrl2:ThinkPad智能风扇控制终极指南,彻底解决过热与噪音问题 【免费下载链接】TPFanCtrl2 ThinkPad Fan Control 2 (Dual Fan) for Windows 10 and 11 项目地址: https://gitcode.com/gh_mirrors/tp/TPFanCtrl2 你是否曾经在安静的会议室中…...

2009-2024年日本人口统计数据
本数据集为日本多层级行政区划的人口统计数据,涵盖都道府县、城市以及政令指定都市的市区三级空间单元,记录了人口规模、结构及动态变化等核心指标。数据可用于人口演变分析、区域发展研究及空间计量模型构建。基于此数据集,可系统开展以下研…...
)
Labelme版本不兼容报错?手把手教你修改源码和JSON文件(附3.18.0与4.5.6对比)
Labelme版本兼容性实战:从源码修改到JSON批量处理的完整指南 当你正专注于一个重要的数据标注项目,突然遭遇"Error opening file lineColor"的红色报错框,整个团队的标注进度被迫停滞——这种场景对于使用Labelme进行图像标注的开发…...

LaTeX2Word-Equation:3分钟实现数学公式从网页到Word的无缝转换指南
LaTeX2Word-Equation:3分钟实现数学公式从网页到Word的无缝转换指南 【免费下载链接】LaTeX2Word-Equation Copy LaTeX Equations as Word Equations, a Chrome Extension 项目地址: https://gitcode.com/gh_mirrors/la/LaTeX2Word-Equation 还在为学术论文中…...