OpenCV实现求解单目相机位姿
单目相机通过对极约束来求解相机运动的位姿。参考了ORBSLAM中单目实现的代码,这里用opencv来实现最简单的位姿估计.

mLeftImg = cv::imread(lImg, cv::IMREAD_GRAYSCALE);
mRightImg = cv::imread(rImg, cv::IMREAD_GRAYSCALE);
cv::Ptr<ORB> OrbLeftExtractor = cv::ORB::create();
cv::Ptr<ORB> OrbRightExtractor = cv::ORB::create();OrbLeftExtractor->detectAndCompute(mLeftImg, noArray(), mLeftKps, mLeftDes);
OrbRightExtractor->detectAndCompute(mRightImg, noArray(), mRightKps, mRightDes);
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create(DescriptorMatcher::BRUTEFORCE_HAMMING);
matcher->match(mLeftDes, mRightDes, mMatches);首先通过ORB特征提取,获取两幅图像的匹配度,我将其连线出来的效果:

RANSAC的算法原理可以google,很容易理解。先看看ORBSLAM中的实现:
bool Initializer::Initialize(const Frame &CurrentFrame, const vector<int> &vMatches12, cv::Mat &R21, cv::Mat &t21,vector<cv::Point3f> &vP3D, vector<bool> &vbTriangulated)
{// Fill structures with current keypoints and matches with reference frame// Reference Frame: 1, Current Frame: 2// Frame2 特征点mvKeys2 = CurrentFrame.mvKeysUn;// mvMatches12记录匹配上的特征点对mvMatches12.clear();mvMatches12.reserve(mvKeys2.size());// mvbMatched1记录每个特征点是否有匹配的特征点,// 这个变量后面没有用到,后面只关心匹配上的特征点mvbMatched1.resize(mvKeys1.size());// 步骤1:组织特征点对for(size_t i=0, iend=vMatches12.size();i<iend; i++){if(vMatches12[i]>=0){mvMatches12.push_back(make_pair(i,vMatches12[i]));mvbMatched1[i]=true;}elsemvbMatched1[i]=false;}// 匹配上的特征点的个数const int N = mvMatches12.size();// Indices for minimum set selection// 新建一个容器vAllIndices,生成0到N-1的数作为特征点的索引vector<size_t> vAllIndices;vAllIndices.reserve(N);vector<size_t> vAvailableIndices;for(int i=0; i<N; i++){vAllIndices.push_back(i);}// Generate sets of 8 points for each RANSAC iteration// **步骤2:在所有匹配特征点对中随机选择8对匹配特征点为一组,共选择mMaxIterations组 **// 用于FindHomography和FindFundamental求解// mMaxIterations:200mvSets = vector< vector<size_t> >(mMaxIterations,vector<size_t>(8,0));DUtils::Random::SeedRandOnce(0);for(int it=0; it<mMaxIterations; it++){vAvailableIndices = vAllIndices;// Select a minimum setfor(size_t j=0; j<8; j++){// 产生0到N-1的随机数int randi = DUtils::Random::RandomInt(0,vAvailableIndices.size()-1);// idx表示哪一个索引对应的特征点被选中int idx = vAvailableIndices[randi];mvSets[it][j] = idx;// randi对应的索引已经被选过了,从容器中删除// randi对应的索引用最后一个元素替换,并删掉最后一个元素vAvailableIndices[randi] = vAvailableIndices.back();vAvailableIndices.pop_back();}}// Launch threads to compute in parallel a fundamental matrix and a homography// 步骤3:调用多线程分别用于计算fundamental matrix和homographyvector<bool> vbMatchesInliersH, vbMatchesInliersF;float SH, SF; // score for H and Fcv::Mat H, F; // H and F// ref是引用的功能:http://en.cppreference.com/w/cpp/utility/functional/ref// 计算homograpy并打分thread threadH(&Initializer::FindHomography,this,ref(vbMatchesInliersH), ref(SH), ref(H));// 计算fundamental matrix并打分thread threadF(&Initializer::FindFundamental,this,ref(vbMatchesInliersF), ref(SF), ref(F));// Wait until both threads have finishedthreadH.join();threadF.join();// Compute ratio of scores// 步骤4:计算得分比例,选取某个模型float RH = SH/(SH+SF);// Try to reconstruct from homography or fundamental depending on the ratio (0.40-0.45)// 步骤5:从H矩阵或F矩阵中恢复R,tif(RH>0.40)return ReconstructH(vbMatchesInliersH,H,mK,R21,t21,vP3D,vbTriangulated,1.0,50);else //if(pF_HF>0.6)return ReconstructF(vbMatchesInliersF,F,mK,R21,t21,vP3D,vbTriangulated,1.0,50);return false;
}
orbslam首先是从配对特征中随机迭代mMaxIterations次,每一次都从配对点中选出8个点用来计算homography和fundamental矩阵,都是用SVD来计算的,如下:
FindFundamental:
void Initializer::FindFundamental(vector<bool> &vbMatchesInliers, float &score, cv::Mat &F21)
{// Number of putative matchesconst int N = vbMatchesInliers.size();// 分别得到归一化的坐标P1和P2vector<cv::Point2f> vPn1, vPn2;cv::Mat T1, T2;Normalize(mvKeys1,vPn1, T1);Normalize(mvKeys2,vPn2, T2);cv::Mat T2t = T2.t();// Best Results variablesscore = 0.0;vbMatchesInliers = vector<bool>(N,false);// Iteration variablesvector<cv::Point2f> vPn1i(8);vector<cv::Point2f> vPn2i(8);cv::Mat F21i;vector<bool> vbCurrentInliers(N,false);float currentScore;// Perform all RANSAC iterations and save the solution with highest scorefor(int it=0; it<mMaxIterations; it++){// Select a minimum setfor(int j=0; j<8; j++){int idx = mvSets[it][j];vPn1i[j] = vPn1[mvMatches12[idx].first];vPn2i[j] = vPn2[mvMatches12[idx].second];}cv::Mat Fn = ComputeF21(vPn1i,vPn2i);F21i = T2t*Fn*T1; //解除归一化// 利用重投影误差为当次RANSAC的结果评分currentScore = CheckFundamental(F21i, vbCurrentInliers, mSigma);if(currentScore>score){F21 = F21i.clone();vbMatchesInliers = vbCurrentInliers;score = currentScore;}}
}通过ComputeF21计算本质矩阵,
cv::Mat Initializer::ComputeF21(const vector<cv::Point2f> &vP1,const vector<cv::Point2f> &vP2)
{const int N = vP1.size();cv::Mat A(N,9,CV_32F); // N*9for(int i=0; i<N; i++){const float u1 = vP1[i].x;const float v1 = vP1[i].y;const float u2 = vP2[i].x;const float v2 = vP2[i].y;A.at<float>(i,0) = u2*u1;A.at<float>(i,1) = u2*v1;A.at<float>(i,2) = u2;A.at<float>(i,3) = v2*u1;A.at<float>(i,4) = v2*v1;A.at<float>(i,5) = v2;A.at<float>(i,6) = u1;A.at<float>(i,7) = v1;A.at<float>(i,8) = 1;}cv::Mat u,w,vt;cv::SVDecomp(A,w,u,vt,cv::SVD::MODIFY_A | cv::SVD::FULL_UV);cv::Mat Fpre = vt.row(8).reshape(0, 3); // v的最后一列cv::SVDecomp(Fpre,w,u,vt,cv::SVD::MODIFY_A | cv::SVD::FULL_UV);w.at<float>(2)=0; // 秩2约束,将第3个奇异值设为0 //强迫约束return u*cv::Mat::diag(w)*vt;
}
看到用的是线性SVD解。
通过重投影来评估本质矩阵的好坏。
float Initializer::CheckFundamental(const cv::Mat &F21, vector<bool> &vbMatchesInliers, float sigma)
{const int N = mvMatches12.size();const float f11 = F21.at<float>(0,0);const float f12 = F21.at<float>(0,1);const float f13 = F21.at<float>(0,2);const float f21 = F21.at<float>(1,0);const float f22 = F21.at<float>(1,1);const float f23 = F21.at<float>(1,2);const float f31 = F21.at<float>(2,0);const float f32 = F21.at<float>(2,1);const float f33 = F21.at<float>(2,2);vbMatchesInliers.resize(N);float score = 0;// 基于卡方检验计算出的阈值(假设测量有一个像素的偏差)const float th = 3.841; //置信度95%,自由度1const float thScore = 5.991;//置信度95%,自由度2const float invSigmaSquare = 1.0/(sigma*sigma);for(int i=0; i<N; i++){bool bIn = true;const cv::KeyPoint &kp1 = mvKeys1[mvMatches12[i].first];const cv::KeyPoint &kp2 = mvKeys2[mvMatches12[i].second];const float u1 = kp1.pt.x;const float v1 = kp1.pt.y;const float u2 = kp2.pt.x;const float v2 = kp2.pt.y;// Reprojection error in second image// l2=F21x1=(a2,b2,c2)// F21x1可以算出x1在图像中x2对应的线lconst float a2 = f11*u1+f12*v1+f13;const float b2 = f21*u1+f22*v1+f23;const float c2 = f31*u1+f32*v1+f33;// x2应该在l这条线上:x2点乘l = 0 const float num2 = a2*u2+b2*v2+c2;const float squareDist1 = num2*num2/(a2*a2+b2*b2); // 点到线的几何距离 的平方const float chiSquare1 = squareDist1*invSigmaSquare;if(chiSquare1>th)bIn = false;elsescore += thScore - chiSquare1;// Reprojection error in second image// l1 =x2tF21=(a1,b1,c1)const float a1 = f11*u2+f21*v2+f31;const float b1 = f12*u2+f22*v2+f32;const float c1 = f13*u2+f23*v2+f33;const float num1 = a1*u1+b1*v1+c1;const float squareDist2 = num1*num1/(a1*a1+b1*b1);const float chiSquare2 = squareDist2*invSigmaSquare;if(chiSquare2>th)bIn = false;elsescore += thScore - chiSquare2;if(bIn)vbMatchesInliers[i]=true;elsevbMatchesInliers[i]=false;}return score;
}最后回到Initializer::Initialize,将单映矩阵和本质矩阵的得分进行比对,选出最合适的,就求出RT了。
ORBSLAM2同时考虑了单应和本质,SLAM14讲中也说到,工程实践中一般都讲两者都计算出来选择较好的,不过效率上会影响比较多感觉。
opencv实现就比较简单了,思路和上面的类似,只是现在只考虑本质矩阵。在之前获取到特征点之后,
/*add ransac method for accurate match*/vector<Point2f> vLeftP2f;vector<Point2f> vRightP2f;for(auto& each:mMatches){vLeftP2f.push_back(mLeftKps[each.queryIdx].pt);vRightP2f.push_back(mRightKps[each.trainIdx].pt);}vector<unsigned char> vTemp(vLeftP2f.size());/*计算本质矩阵,用RANSAC*/Mat transM = findEssentialMat(vLeftP2f, vRightP2f, cameraMatrix,RANSAC, 0.999, 1.0, vTemp);vector<DMatch> optimizeM;for(int i = 0; i < vTemp.size(); i++){if(vTemp[i]){optimizeM.push_back(mMatches[i]);}}mMatches.swap(optimizeM);cout << transM<<endl;Mat optimizeP;drawMatches(mLeftImg, mLeftKps, mRightImg, mRightKps, mMatches, optimizeP);imshow("output5", optimizeP);看下结果:

确实效果好多了,匹配准确度比之前的要好,之后我们就可以通过这个本质矩阵来计算RT了。
Mat R, t, mask;
recoverPose(transM, vLeftP2f, vRightP2f, cameraMatrix, R, t, mask);一个接口搞定。最后我们可以通过验证对极约束,来看看求出的位姿是否准确。
定义检查函数:
Mat cameraMatrix = (Mat_<double>(3,3) << CAM_FX, 0.0, CAM_CX, 0.0, CAM_FY, CAM_CY, 0.0, 0.0, 1.0);bool epipolarConstraintCheck(Mat CameraK, vector<Point2f>& p1s, vector<Point2f>& p2s, Mat R, Mat t){for(int i = 0; i < p1s.size(); i++){Mat y1 = (Mat_<double>(3,1)<<p1s[i].x, p1s[i].y, 1);Mat y2 = (Mat_<double>(3,1)<<p2s[i].x, p2s[i].y, 1);//T 的凡对称矩阵Mat t_x = (Mat_<double>(3,3)<< 0, -t.at<double>(2,0), t.at<double>(1,0),t.at<double>(2,0), 0, -t.at<double>(0,0),-t.at<double>(1,0),t.at<double>(0,0),0);Mat d = y2.t() * cameraMatrix.inv().t() * t_x * R * cameraMatrix.inv()* y1;cout<<"epipolar constraint = "<<d<<endl;}}最后可以看到结果都是趋近于0的,证明位姿还是比较准确的。
相关文章:
OpenCV实现求解单目相机位姿
单目相机通过对极约束来求解相机运动的位姿。参考了ORBSLAM中单目实现的代码,这里用opencv来实现最简单的位姿估计. mLeftImg cv::imread(lImg, cv::IMREAD_GRAYSCALE); mRightImg cv::imread(rImg, cv::IMREAD_GRAYSCALE); cv::Ptr<ORB> OrbLeftExtractor …...
深入解析PostgreSQL:命令和语法详解及使用指南
文章目录 摘要引言基本操作安装与配置连接和退出 数据库操作创建数据库删除数据库切换数据库 表操作创建表删除表插入数据查询数据更新数据删除数据 索引和约束创建索引创建约束 用户管理创建用户授权用户修改用户密码 备份和恢复备份数据库恢复数据库 高级特性结语参考文献 摘…...

Elasticsearch数据搜索原理
Elasticsearch 是一个开源的、基于 Lucene 的分布式搜索和分析引擎,设计用于云计算环境中,能够实现实时的、可扩展的搜索、分析和探索全文和结构化数据。它具有高度的可扩展性,可以在短时间内搜索和分析大量数据。 Elasticsearch 不仅仅是一个…...
vue模版语法-{{}}/v-text/v-html/v-once
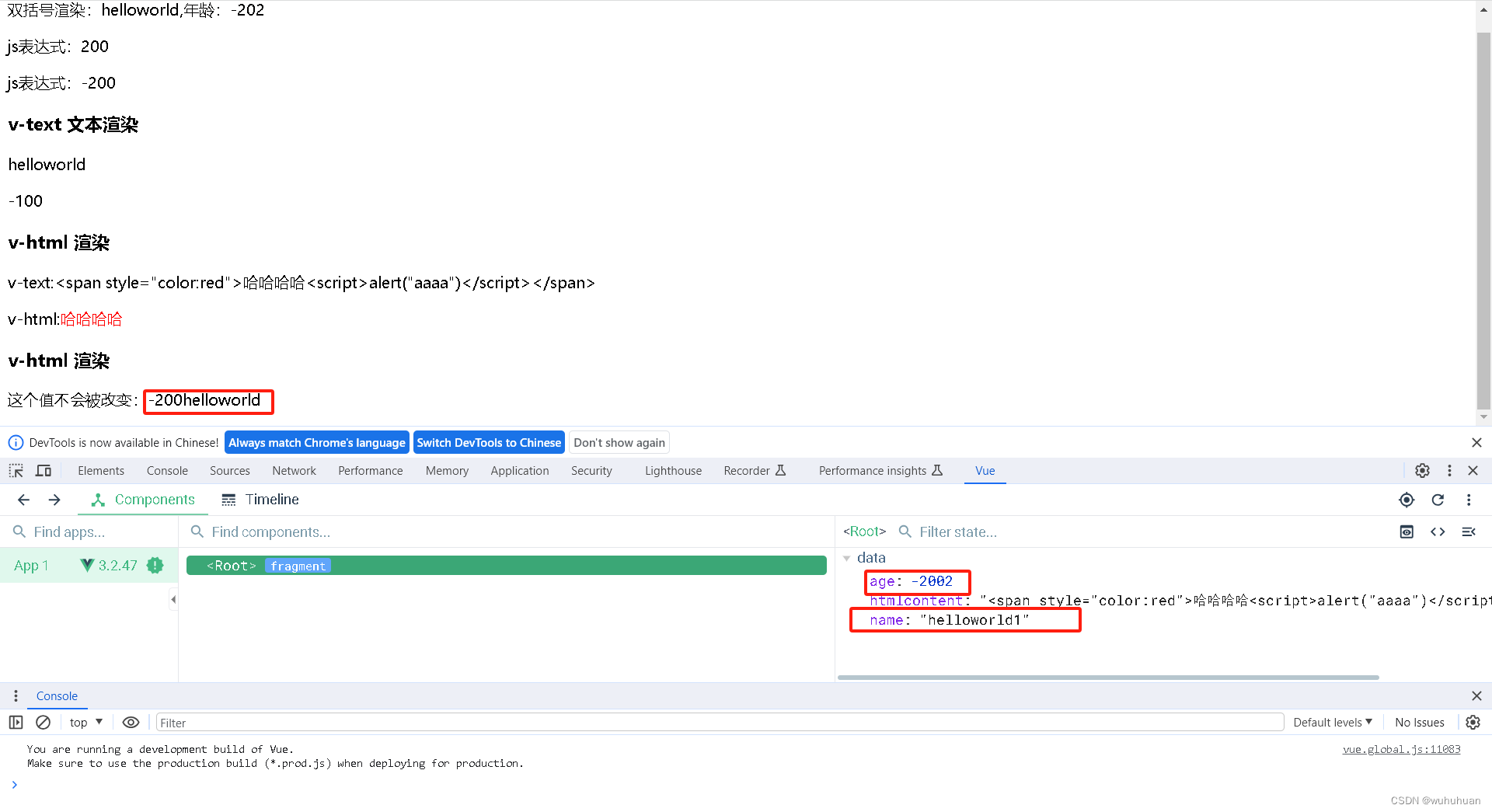
一、{{}}双括号:用于文本渲染 1、 {{变量名}}:data中返回对象的变量名 2、{{js表达式}}:可以直接进行js表达式处理 3、注意:双大括号中不要写等式书写 二、v-text 指令,用于文本渲染 1、为了解决双大括号渲染数据出现闪烁问题 三、v-cloak …...

前端埋点上传
没事看看: 从用户行为到数据:数据采集全景解析 | 人人都是产品经理 搭建前端监控,采集用户行为的 N 种姿势-前端监控设备 创业公司做数据分析(三)用户行为数据采集系统-CSDN博客...
)
第11章 Redis(一)
11.1 谈谈你对Redis的理解 难度:★★★ 重点:★★ 白话解析 对Redis的理解无非从三个方面去说一说:背景,是什么,特性。 背景:数据直接存磁盘太慢了,虽然MySQL用到了BufferPool等缓存,但是为了保证数据不丢失,MySQL采用的RedoLog依然要直接写磁盘。所以,数据的存储就…...

freertos信号量之二值信号量
freertos信号量之二值信号量 简介例程 简介 FreeRTOS的二值信号量(Binary Semaphore)是用于实现进程间同步和临界资源保护的重要工具。以下是一些二值信号量的常用函数及其说明: 1)xSemaphoreCreateBinary() 创建一个二值信号量…...
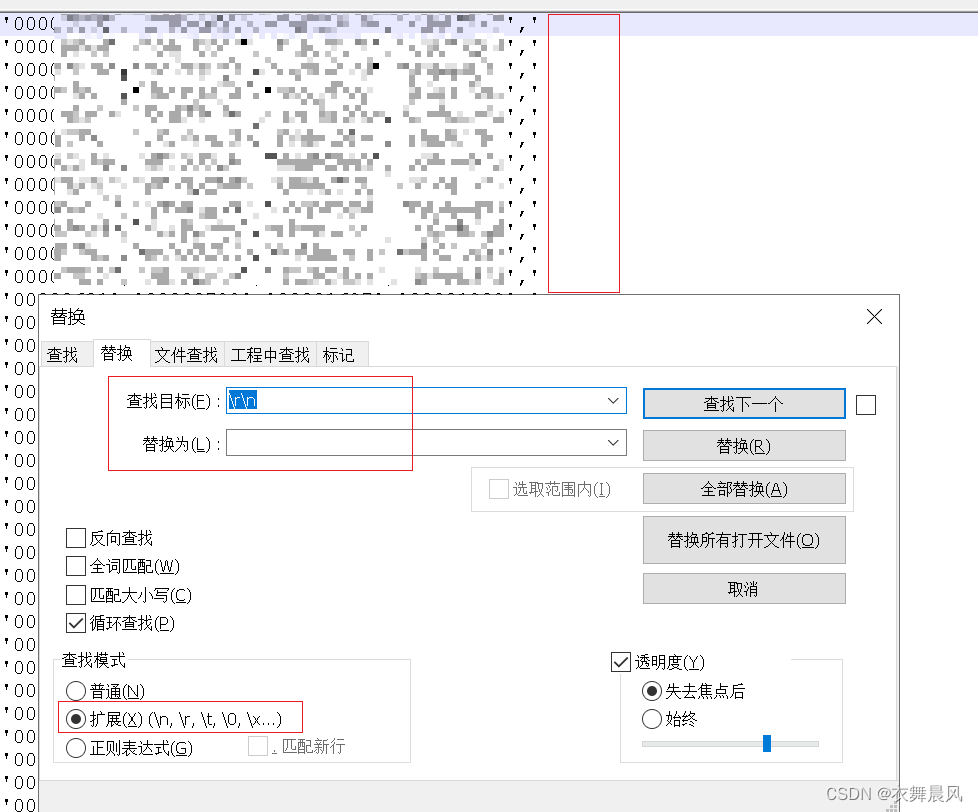
notepad++ 如何去除换行
选中下方的“扩展” “查找目标”输入:\r\n,替换为:空白 最后全部替换。...

PPT NO.2 插入透明校徽
插入透明校徽: ①先下载一个校徽: ②用矢量网站转换一下,这个免费的,很多其他的要钱钱: 位图转矢量图,JPG转矢量,PNG转矢量,GIF转矢量,BMP转矢量 - 在线工具 - 字客网 (fontke.com) 转换完了如下: 打…...

Linux系统部署PostgreSQL 单机数据库
安装方式 1 安装包方式 (Packages and Installers) 支持的操作系统包括 liunxMacosWindowsBSDSolaris 2 源码安装 (Source code) 下载源码包 通过下载地址PostgreSQL: File Browser 可以看到有各个版本的源码目录 选择13.1…...

好用的办公摸鱼神器
http://t.chaojizhu.cn/fawork/Down?uid180819...

手写Java序列化工具
一、思考 假设给一个java bean,让你按照 json 的格式打印出来,你会怎么做? 比如这个java bean 长这样,并且创建了一个叫宝儿姐的朋友 package com.test;public class User {private String name;private Integer age;private Bi…...
mysql面试题26:MySQL中什么是MVCC,它的底层原理是什么
该文章专注于面试,面试只要回答关键点即可,不需要对框架有非常深入的回答,如果你想应付面试,是足够了,抓住关键点 面试官:什么是MVCC,它的底层原理是什么? MVCC(Multi-Version Concurrency Control)是一种并发控制机制,用于在数据库中实现并发事务的隔离性和一致性…...
SQL进阶 - SQL的编程规范
性能优化是一个很有趣的探索方向,将耗时耗资源的查询优化下来也是一件很有成就感的事情,但既然编程是一种沟通手段,那每一个数据开发者就都有义务保证写出的代码逻辑清晰,具有很好的可读性。 目录 引子 小试牛刀 答案 引言 …...
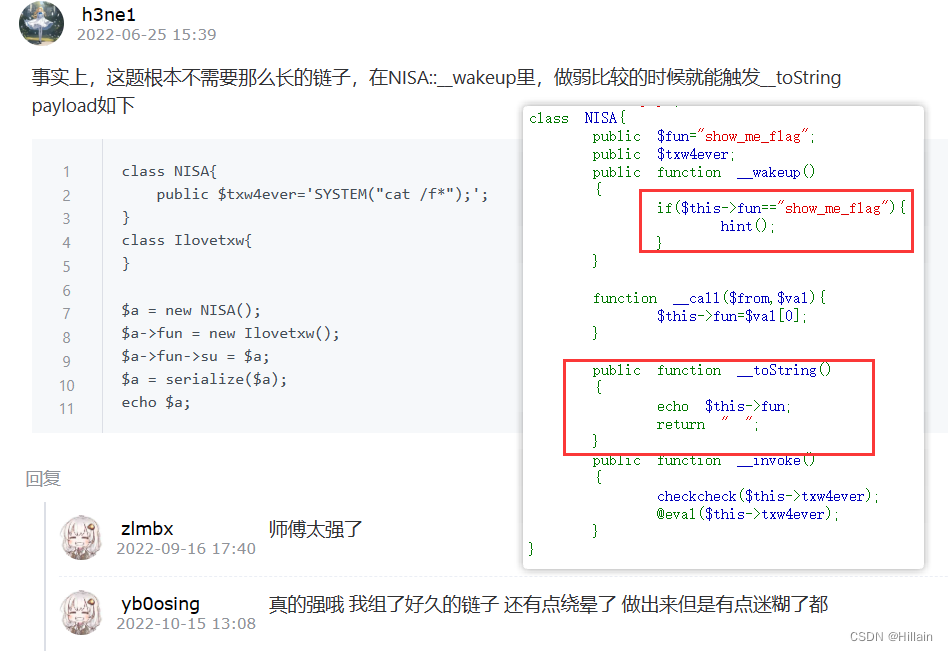
[NISACTF 2022]babyserialize - 反序列化+waf绕过【*】
[NISACTF 2022]babyserialize 一、解题过程二、思考总结(一)、关于题目的小细节(二)、关于弱类型比较技巧 一、解题过程 题目代码: <?php include "waf.php"; class NISA{public $fun"show_me_fl…...

docker部署Vaultwarden密码共享管理系统
Vaultwarden是一个开源的密码管理器,它是Bitwarden密码管理器的自托管版本。它提供了类似于Bitwarden的功能,允许用户安全地存储和管理密码、敏感数据和身份信息。 Vaultwarden的主要特点包括: 1. 安全的数据存储:Vaultwarden使…...

低代码开发技术选型
低代码的技术路径 低代码开发低代码开发优势低代码的技术路径1.表格驱动2.表单驱动3.数据模型4.领域模型 低代码的核心能力企业级低代码开发平台的11项关键能力低代码平台的流程引擎选型低代码平台的流程设计器选型低代码平台的表单设计器选型低代码平台的Vue.js 框架选型 低代…...

在vue2中,v-model和.sync的区别
最近在封装一个弹窗组件时,用了比较复杂的逻辑去做显示和隐藏的逻辑,在查看同事的代码之后,才知道还有更简单的方法,自己已经忘了一些API. popup组件里统一的template: <div v-ifisShowPopup> // 弹窗内容 <…...

nginx 配置
一、nginx安装 下载地址:http://nginx.org/en/download.html,和Keepalived搭配使用,防止nginx挂掉 二、nginx配置 ########### 每个指令必须有分号结束。################# #user administrator administrators; #配置用户或者组…...
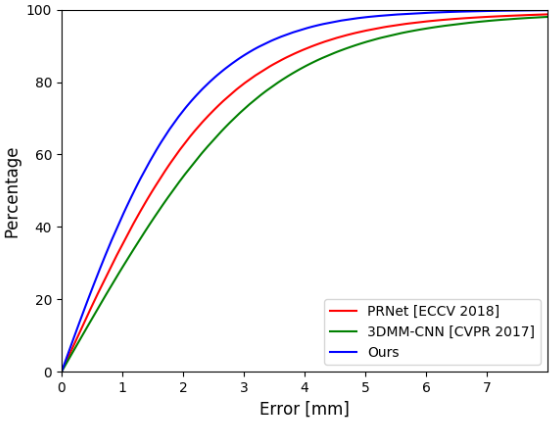
【计算机视觉|人脸建模】学习从图像中回归3D面部形状和表情而无需3D监督
本系列博文为深度学习/计算机视觉论文笔记,转载请注明出处 标题:Learning to Regress 3D Face Shape and Expression from an Image without 3D Supervision 链接:[1905.06817] Learning to Regress 3D Face Shape and Expression from an I…...
详解)
后进先出(LIFO)详解
LIFO 是 Last In, First Out 的缩写,中文译为后进先出。这是一种数据结构的工作原则,类似于一摞盘子或一叠书本: 最后放进去的元素最先出来 -想象往筒状容器里放盘子: (1)你放进的最后一个盘子(…...

RestClient
什么是RestClient RestClient 是 Elasticsearch 官方提供的 Java 低级 REST 客户端,它允许HTTP与Elasticsearch 集群通信,而无需处理 JSON 序列化/反序列化等底层细节。它是 Elasticsearch Java API 客户端的基础。 RestClient 主要特点 轻量级ÿ…...

AI-调查研究-01-正念冥想有用吗?对健康的影响及科学指南
点一下关注吧!!!非常感谢!!持续更新!!! 🚀 AI篇持续更新中!(长期更新) 目前2025年06月05日更新到: AI炼丹日志-28 - Aud…...
)
Java 语言特性(面试系列2)
一、SQL 基础 1. 复杂查询 (1)连接查询(JOIN) 内连接(INNER JOIN):返回两表匹配的记录。 SELECT e.name, d.dept_name FROM employees e INNER JOIN departments d ON e.dept_id d.dept_id; 左…...
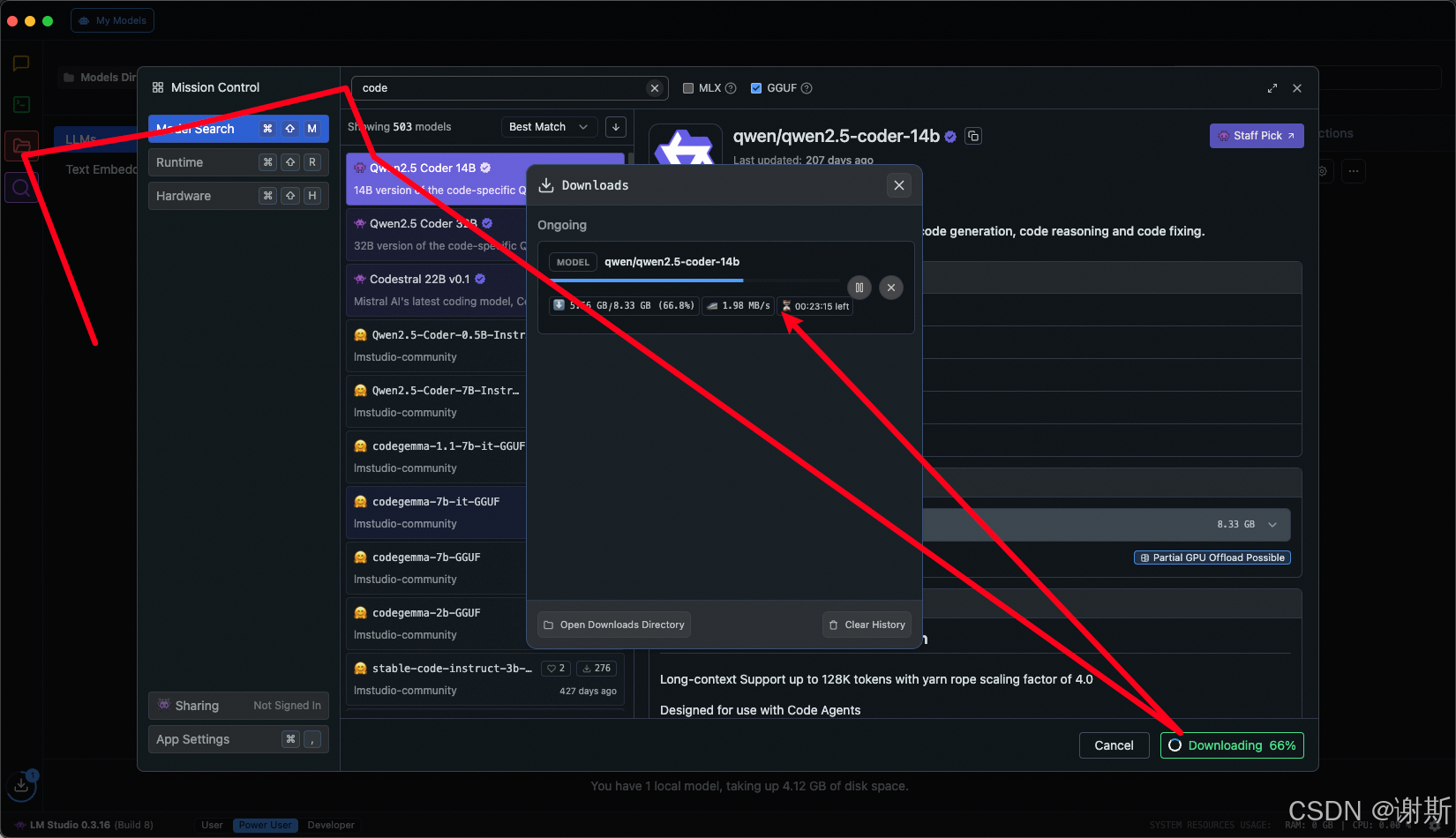
[大语言模型]在个人电脑上部署ollama 并进行管理,最后配置AI程序开发助手.
ollama官网: 下载 https://ollama.com/ 安装 查看可以使用的模型 https://ollama.com/search 例如 https://ollama.com/library/deepseek-r1/tags # deepseek-r1:7bollama pull deepseek-r1:7b改token数量为409622 16384 ollama命令说明 ollama serve #:…...
)
【LeetCode】3309. 连接二进制表示可形成的最大数值(递归|回溯|位运算)
LeetCode 3309. 连接二进制表示可形成的最大数值(中等) 题目描述解题思路Java代码 题目描述 题目链接:LeetCode 3309. 连接二进制表示可形成的最大数值(中等) 给你一个长度为 3 的整数数组 nums。 现以某种顺序 连接…...
ubuntu22.04有线网络无法连接,图标也没了
今天突然无法有线网络无法连接任何设备,并且图标都没了 错误案例 往上一顿搜索,试了很多博客都不行,比如 Ubuntu22.04右上角网络图标消失 最后解决的办法 下载网卡驱动,重新安装 操作步骤 查看自己网卡的型号 lspci | gre…...
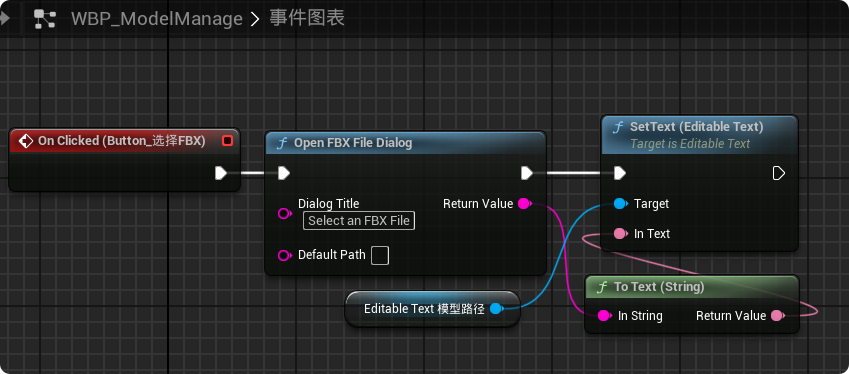
【UE5 C++】通过文件对话框获取选择文件的路径
目录 效果 步骤 源码 效果 步骤 1. 在“xxx.Build.cs”中添加需要使用的模块 ,这里主要使用“DesktopPlatform”模块 2. 添加后闭UE编辑器,右键点击 .uproject 文件,选择 "Generate Visual Studio project files",重…...

人工智能 - 在Dify、Coze、n8n、FastGPT和RAGFlow之间做出技术选型
在Dify、Coze、n8n、FastGPT和RAGFlow之间做出技术选型。这些平台各有侧重,适用场景差异显著。下面我将从核心功能定位、典型应用场景、真实体验痛点、选型决策关键点进行拆解,并提供具体场景下的推荐方案。 一、核心功能定位速览 平台核心定位技术栈亮…...

数据分析六部曲?
引言 上一章我们说到了数据分析六部曲,何谓六部曲呢? 其实啊,数据分析没那么难,只要掌握了下面这六个步骤,也就是数据分析六部曲,就算你是个啥都不懂的小白,也能慢慢上手做数据分析啦。 第一…...