open3d最大平面检测,平面分割
1.点云读入
- 读入文件(配套点云下载链接)
# 读取点云
pcd = o3d.io.read_point_cloud("point_cloud_00000.ply")
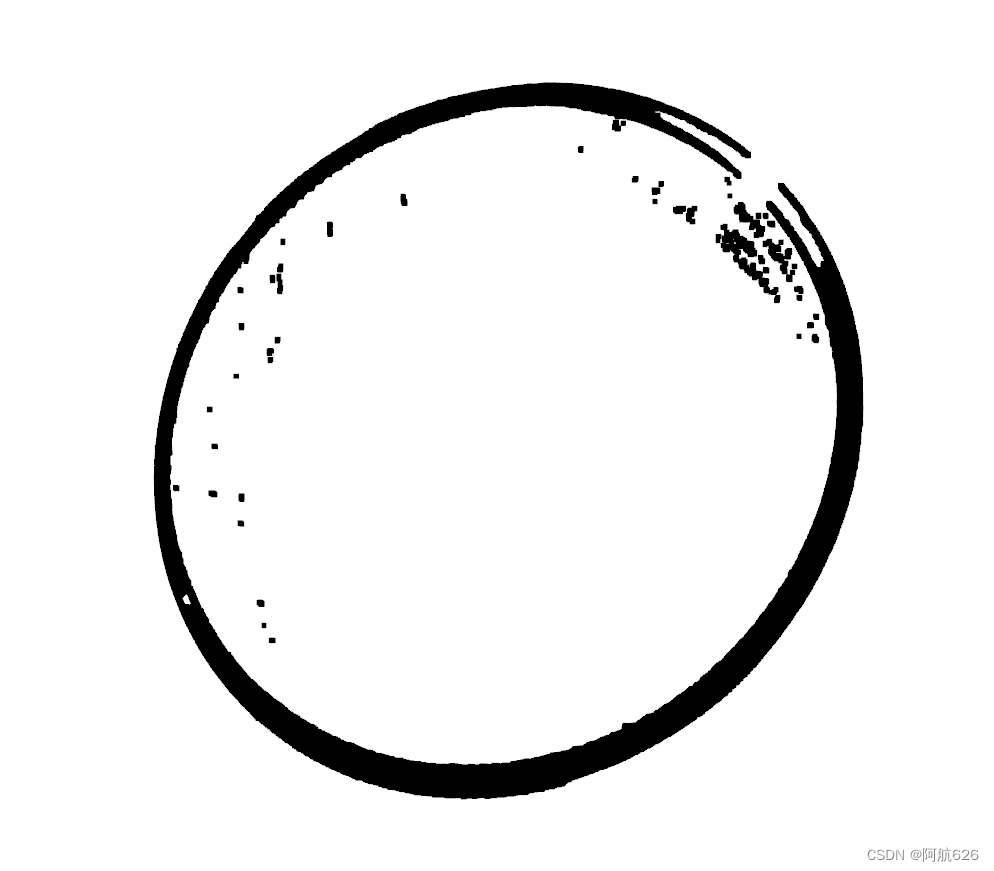
- 配套点云颜色为白色,open3d的点云显示默认背景为白色,所以将点云颜色更改为黑色
pcd.colors = o3d.utility.Vector3dVector(np.zeros(np.array(pcd.colors).shape))
- 显示点云
o3d.visualization.draw_geometries([pcd])
2.平面分割
- RANSAC方法寻找最大平面(RANSAC方法可以在干扰点存在的情况下拟合数据,需要给定拟合方程,通过在数据中随机选取指定个数的点来求解方程参数,然后看所有数据中有多少数据满足所求解得到的方程,如果数量超过设定阈值,就完成拟合)
- 注意,RANSAC方法随机选点,所以结果会具有一定的随机性,特别是干扰点较多的时候,两次运行可能会得到不一样的结果
plane_model, inliers = pcd.segment_plane(distance_threshold=1 * 1e-3,ransac_n=3,num_iterations=1000)
- 关键参数:
- distance_threshold:点到平面的最小距离,越小结果越精准
- ransac_n:求解平面方程所需的随机点个数
- num_iterations:随机平面被采样和验证的次数(随机选取点的次数,越大越可能得到正确结果,但会越慢)
- 返回参数:
- plane_model:平面标准方程参数(将平面返回为(a,b,c,d),使得对于平面上的每个点(x,y,z))
- inliers:内点(满足平面方程的点)的索引列表
[a, b, c, d] = plane_model
print(f"Plane equation: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")
Plane equation: 0.00x + -0.01y + 1.00z + -0.44 = 0
3.内点提取与可视化显示
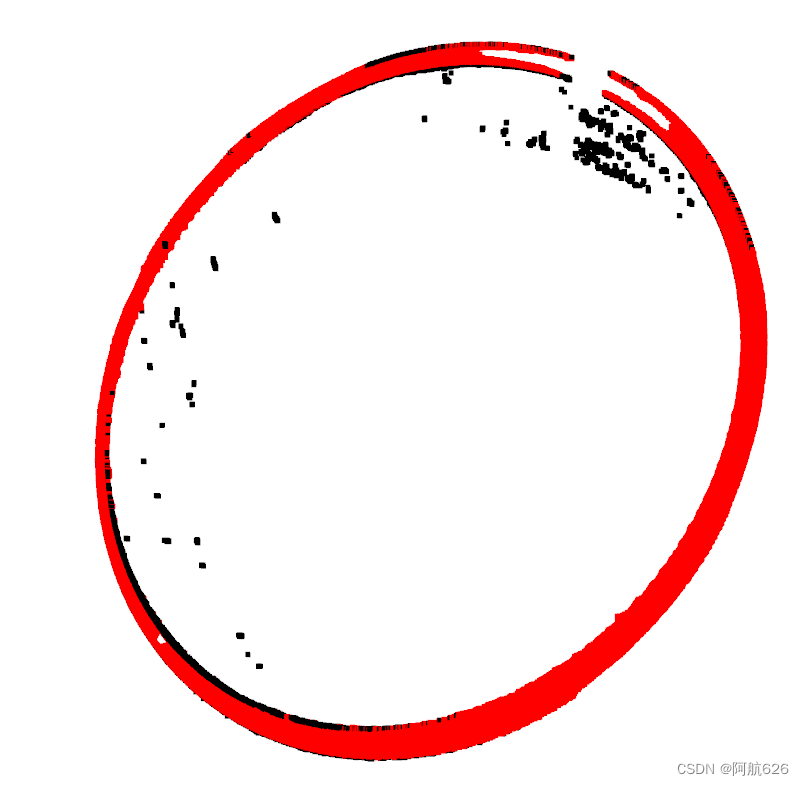
- 提取内点并涂色:
inlier_cloud = pcd.select_by_index(inliers)
inlier_cloud.paint_uniform_color([1.0, 0, 0])
- 保留外点:(通过内点索引取反)
outlier_cloud = pcd.select_by_index(inliers, invert=True)
- 内点外点同时可视化:
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])
4.整体代码
import open3d as o3d
import numpy as nppcd = o3d.io.read_point_cloud('duanmian/1/point_cloud_00000.ply')
points = np.array(pcd.points)
colors = np.zeros(np.array(pcd.points).shape[0])
pcd.colors = o3d.utility.Vector3dVector(np.zeros(np.array(pcd.colors).shape))
#o3d.visualization.draw_geometries([pcd])plane_model, inliers = pcd.segment_plane(distance_threshold=1 * 1e-3,ransac_n=3,num_iterations=1000)
[a, b, c, d] = plane_model
print(f"Plane equation: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")inlier_cloud = pcd.select_by_index(inliers)
inlier_cloud.paint_uniform_color([1.0, 0, 0])
outlier_cloud = pcd.select_by_index(inliers, invert=True)
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])
相关文章:
open3d最大平面检测,平面分割
1.点云读入 读入文件(配套点云下载链接) # 读取点云 pcd o3d.io.read_point_cloud("point_cloud_00000.ply")配套点云颜色为白色,open3d的点云显示默认背景为白色,所以将点云颜色更改为黑色 pcd.colors o3d.utilit…...
)
【C++】4.类和对象(下)
1.再谈构造函数 1赋值 class Date { public:Date(int year, int month, int day){_year year;_month month;_day day;}private:int _year;int _month;int _day; };构造函数体中的语句只能将其称作为赋初值,而不能称作初始化。因为初始化只能初始化一次…...
自动驾驶仿真:ECU TEST 、VTD、VERISTAND连接配置
文章目录一、ECU TEST 连接配置简介二、TBC配置 test bench configuration三、TCF配置 test configuration提示:以下是本篇文章正文内容,下面案例可供参考 一、ECU TEST 连接配置简介 1、ECU TEST(简称ET),用于HIL仿…...

postgres数据库连接管理
1.连接命令psql -d postgres -h 10.0.0.51. -p 1921 -U postgres(-d指定数据库名字)2.pg防火墙介绍(pg实例层面的权限控制)pg_hba.conf文件配置文件分为5部分:配置示例#TYPE DATABASE USER ADDRESS METHODhost all loc…...

【华为OD机试模拟题】用 C++ 实现 - 环中最长子串(2023.Q1)
最近更新的博客 华为OD机试 - 入栈出栈(C++) | 附带编码思路 【2023】 华为OD机试 - 箱子之形摆放(C++) | 附带编码思路 【2023】 华为OD机试 - 简易内存池 2(C++) | 附带编码思路 【2023】 华为OD机试 - 第 N 个排列(C++) | 附带编码思路 【2023】 华为OD机试 - 考古…...

Spring:@Async 注解和AsyncResult与CompletableFuture使用
Async概述 Spring中用Async注解标记的方法,称为异步方法,它会在调用方的当前线程之外的独立的线程中执行, 其实就相当于我们自己new Thread(()-> System.out.println("hello world !"))这样在另一个线程中去执行相应的业务逻辑…...

tidb ptca,ptcp考证
PingCAP 认证 TiDB 数据库专员 V6 考试(2023-02-23)https://learn.pingcap.com/learner/exam-market/list?categoryPCTA PingCAP 认证 TiDB 数据库管理专家(PCTP - DBA)认证考试范围指引 - ☄️ 学习与认证 - TiDB 的问答社区:lo…...
关于用windows开发遇到的各种乌龙事件之node版本管理---nvm install node之后 npm 找不到的问题
友情提醒,开发最好用nvm控制node版本 nrm 控制镜像源,能少掉很多头发开发过程中技术迭代更新的时候最要老命的就是 历史项目的node版本没有记录,导致开启旧项目的时候就会报错。尤其是npm 升级到8.x.x以后,各种版本不兼容。 真…...
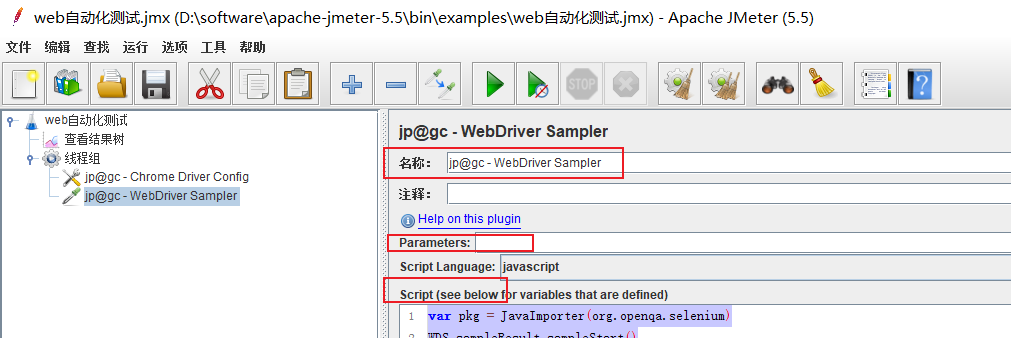
JMeter做UI自动化
插件安装搜插件selenium,安装添加config添加线程组右键线程组->添加->配置元件->jpgc - Chrome Driver Configoption和proxy不解释了添加Sampler右键线程组->添加->取样器->jpgc - WebDriver Samplerscript language 选择:JavaScript&…...
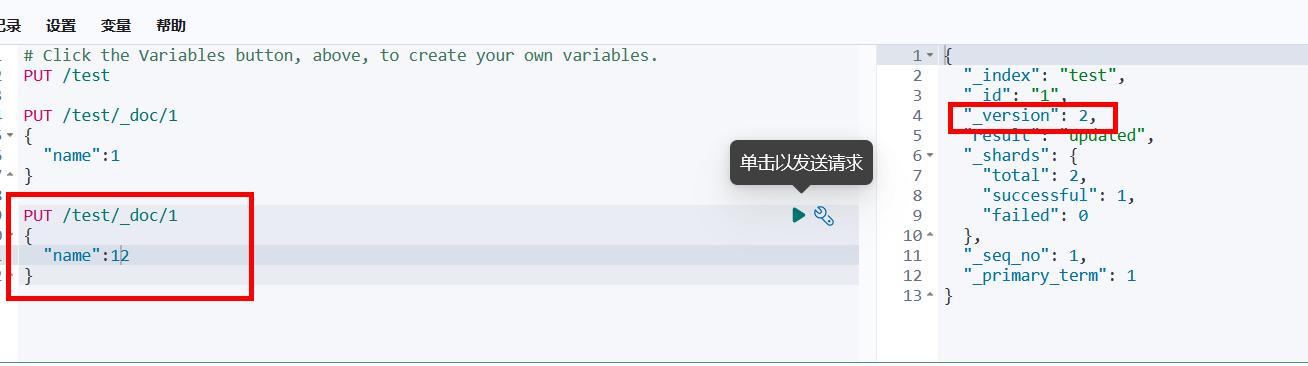
Kibana与Elasticsearch
下载与安装Kibanahttps://www.elastic.co/cn/downloads/kibanaKibana的版本与Elasticsearch的版本是一致的,使用方法也和Elasticsearch一致。由于我的英文不是特别好,我们找到config/kibana.yml末尾添加i18n.locale: "zh-CN" ,汉化…...
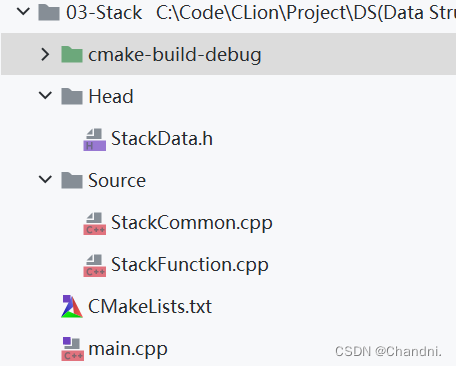
[数据结构]:03-栈(C语言实现)
目录 前言 已完成内容 单链表实现 01-开发环境 02-文件布局 03-代码 01-主函数 02-头文件 03-StackCommon.cpp 04-StackFunction.cpp 结语 前言 此专栏包含408考研数据结构全部内容,除其中使用到C引用外,全为C语言代码。使用C引用主要是为了简…...
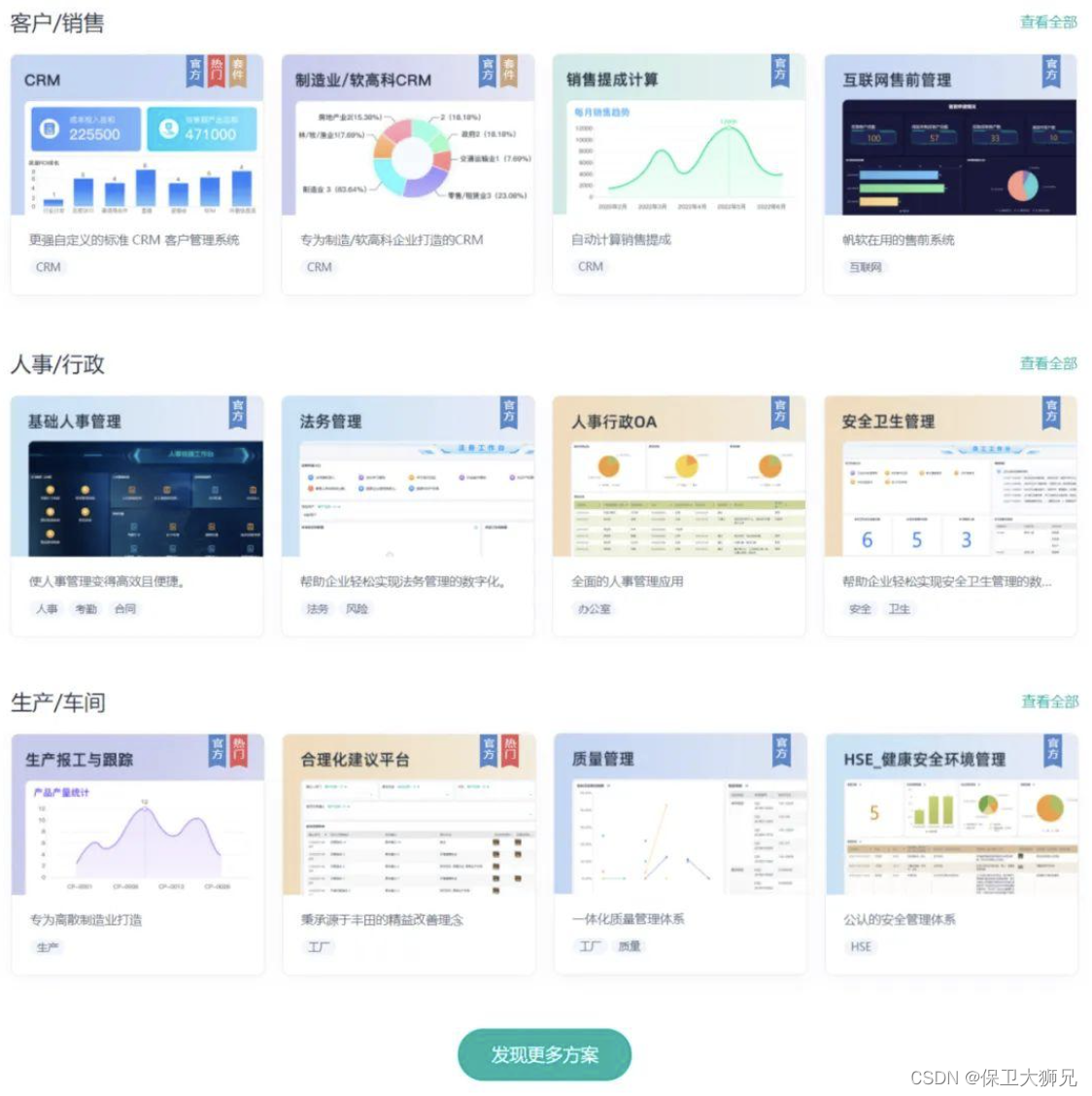
1W+企业都在用的数字化管理秘籍,快收藏!
企业数字化,绕不开的话题。 随着国家相继出台各种举措助力中小企业数字化转型,积极推动产业数字化转型,培育数字经济新生态,企业想要谋生存,求发展,必然需要做好数字化转型和管理。 本篇文章想跟大家一起…...
多模态机器学习入门——文献阅读(一)Multimodal Machine Learning: A Survey and Taxonomy
文章目录说明论文阅读AbstractIntroductionIntroduction总结Applications:A Historical Perspective补充与总结3 MULTIMODAL REPRESENTATIONS总结Joint Repersentations(1)总结和附加(一)Joint Repersentations(2)总结…...
)
通过哲学家进餐问题学习线程间协作(代码实现以leetcode1226为例)
哲学家进餐问题(代码实现以leetcode1226为例)问题场景解决思路解决死锁问题代码实现cgo(代码实现以leetcode1226为例) 提到多线程和锁解决问题,就想到了os中哲学家进餐问题。 问题场景 回想该问题产生场景,五个哲学家共用一张圆桌,分别坐在…...

消息队列--Kafka
Kafka简介集群部署配置Kafka测试Kafka1.Kafka简介 数据缓冲队列。同时提高了可扩展性。具有峰值处理能力,使用消息队列能够使关键组件顶住突发的访问压力,而不会因为突发的超负荷的请求而完全崩溃。 Kafka是一个分布式、支持分区的(partition…...

外盘国际期货:我国当代年轻人结婚逐年下降
我国当代年轻人 结婚现状结婚少了 结婚晚了 2013年后结婚人数逐年下降 结婚少了 离婚多了 结婚年龄越来越迟 以30岁为界线,30岁之后结婚占比逐年增加 2018 20-24岁:435.6万人 25-29岁:736.2万人 30-34岁:314.7万人 35-3…...

Ubuntu 22.04.2 发布,可更新至 Linux Kernel 5.19
Ubuntu 22.04 LTS (Jammy Jellyfish) Ubuntu 22.04.2 发布,可更新至 Linux Kernel 5.19 请访问原文链接:Ubuntu 22.04 LTS (Jammy Jellyfish),查看最新版。原创作品,转载请保留出处。 作者主页:www.sysin.org 发行说…...

论文阅读笔记——《室内服务机器人的实时场景分割算法》
一、主要工作 通过深度可分离卷积、膨胀卷积和通道注意力机制设计轻量级的高准确度特征提取模块。融合浅层特征与深层语义特征获得更丰富的图像特征。在NYUDv2和CamVid数据集上的MIoU分别达到72.7%和59.9%,模型的计算力为4.2GFLOPs,参数量为8.3Mb。 二…...

Hive学习——自定义函数UDFUDTF
目录 一、添加依赖 二、编写自定义UDF函数 (一)自定义首字母大写函数 1.java代码 2.hive中运行 (二)自定义字符串全部小写的函数 1.java代码 2.hive运行 (三)创建解析JSON字符串的函数 1.java代码 三、自定义编写UDTF函数 1.java编写 2.hive运行 虽然Hive中内置了…...
自学前端,你必须要掌握的3种定时任务
当你看到这篇博客的时候,一定会和狗哥结下不解之缘,因为狗哥的博客里不仅仅有代码,还有很多代码之外的东西,如果你可以看到最底部,看到投票环节,我相信你一定感觉到了,狗哥的真诚,狗…...

SpringBoot-17-MyBatis动态SQL标签之常用标签
文章目录 1 代码1.1 实体User.java1.2 接口UserMapper.java1.3 映射UserMapper.xml1.3.1 标签if1.3.2 标签if和where1.3.3 标签choose和when和otherwise1.4 UserController.java2 常用动态SQL标签2.1 标签set2.1.1 UserMapper.java2.1.2 UserMapper.xml2.1.3 UserController.ja…...

React 第五十五节 Router 中 useAsyncError的使用详解
前言 useAsyncError 是 React Router v6.4 引入的一个钩子,用于处理异步操作(如数据加载)中的错误。下面我将详细解释其用途并提供代码示例。 一、useAsyncError 用途 处理异步错误:捕获在 loader 或 action 中发生的异步错误替…...

转转集团旗下首家二手多品类循环仓店“超级转转”开业
6月9日,国内领先的循环经济企业转转集团旗下首家二手多品类循环仓店“超级转转”正式开业。 转转集团创始人兼CEO黄炜、转转循环时尚发起人朱珠、转转集团COO兼红布林CEO胡伟琨、王府井集团副总裁祝捷等出席了开业剪彩仪式。 据「TMT星球」了解,“超级…...

vue3 字体颜色设置的多种方式
在Vue 3中设置字体颜色可以通过多种方式实现,这取决于你是想在组件内部直接设置,还是在CSS/SCSS/LESS等样式文件中定义。以下是几种常见的方法: 1. 内联样式 你可以直接在模板中使用style绑定来设置字体颜色。 <template><div :s…...
)
postgresql|数据库|只读用户的创建和删除(备忘)
CREATE USER read_only WITH PASSWORD 密码 -- 连接到xxx数据库 \c xxx -- 授予对xxx数据库的只读权限 GRANT CONNECT ON DATABASE xxx TO read_only; GRANT USAGE ON SCHEMA public TO read_only; GRANT SELECT ON ALL TABLES IN SCHEMA public TO read_only; GRANT EXECUTE O…...

IoT/HCIP实验-3/LiteOS操作系统内核实验(任务、内存、信号量、CMSIS..)
文章目录 概述HelloWorld 工程C/C配置编译器主配置Makefile脚本烧录器主配置运行结果程序调用栈 任务管理实验实验结果osal 系统适配层osal_task_create 其他实验实验源码内存管理实验互斥锁实验信号量实验 CMISIS接口实验还是得JlINKCMSIS 简介LiteOS->CMSIS任务间消息交互…...
多种风格导航菜单 HTML 实现(附源码)
下面我将为您展示 6 种不同风格的导航菜单实现,每种都包含完整 HTML、CSS 和 JavaScript 代码。 1. 简约水平导航栏 <!DOCTYPE html> <html lang"zh-CN"> <head><meta charset"UTF-8"><meta name"viewport&qu…...
用docker来安装部署freeswitch记录
今天刚才测试一个callcenter的项目,所以尝试安装freeswitch 1、使用轩辕镜像 - 中国开发者首选的专业 Docker 镜像加速服务平台 编辑下面/etc/docker/daemon.json文件为 {"registry-mirrors": ["https://docker.xuanyuan.me"] }同时可以进入轩…...

聊一聊接口测试的意义有哪些?
目录 一、隔离性 & 早期测试 二、保障系统集成质量 三、验证业务逻辑的核心层 四、提升测试效率与覆盖度 五、系统稳定性的守护者 六、驱动团队协作与契约管理 七、性能与扩展性的前置评估 八、持续交付的核心支撑 接口测试的意义可以从四个维度展开,首…...

智能分布式爬虫的数据处理流水线优化:基于深度强化学习的数据质量控制
在数字化浪潮席卷全球的今天,数据已成为企业和研究机构的核心资产。智能分布式爬虫作为高效的数据采集工具,在大规模数据获取中发挥着关键作用。然而,传统的数据处理流水线在面对复杂多变的网络环境和海量异构数据时,常出现数据质…...