ros下用kinectv2运行orbslam2
目录
前提
创建工作空间
orbslam2源码配置、测试:
配置usb_cam ROS功能包
配置kinect
前提
vim 、 cmake 、 git 、 gcc 、 g++ 这些一般都装了
主要是Pangolin 、 OpenCV 、 Eigen的安装
18.04建议Pangolin0.5
创建工作空间
我们在主目录下创建一个catkin_ws文件夹
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
orbslam2源码配置、测试:
环境:ubuntu18.04
在上面创建好的ROS工作空间下的src目录安装orbslam2
cd ~/catkin_ws/src/
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
cd ORB_SLAM2
chmod +x build.sh
./build.sh编译时如果有如下错误:在ORB_SLAM2/include/system.h头文件中加上 #include <unistd.h>
运行测试(单目):
需要在目录中创建一个data文件夹,其中需要放入对应的数据(这里放入这里下载的Tum数据集rgbd_dataset_freiburg1_xyz,并且解压缩)
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml data/rgbd_dataset_freiburg1_xyz运行测试(RGBD)
cvpr-ros-pkg - Revision 232: /trunk/rgbd_benchmark/rgbd_benchmark_tools/src/rgbd_benchmark_tools
上面网址下载好以后拷贝associate.py至ORB_SLAM2主文件夹内。在associate.py所在的目录执行:(将RGB信息和深度信息链接到一起)
python associate.py data/rgbd_dataset_freiburg1_xyz/rgb.txt data/rgbd_dataset_freiburg1_xyz/depth.txt > data/rgbd_dataset_freiburg1_xyz/associations.txt注:我们可以看到association中的第一行中的信息是 depth 和 rgb 两个的第一行信息的和



然后执行:
./Examples/RGB-D/rgbd_tum ./Vocabulary/ORBvoc.txt ./Examples/RGB-D/TUM1.yaml data/rgbd_dataset_freiburg1_xyz data/rgbd_dataset_freiburg1_xyz/associations.txt如果需要在ROS下运行的话还需要添加以下步骤:
sudo gedit ~/.bashrc在文件末尾添加:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/ros/catkin_ws/src/ORB_SLAM2/Examples/ROS
后面的“/home/ros/catkin_ws/src/ORB_SLAM2/Examples/ROS”是自己保存的文件路径,保存使其生效
source ~/.bashrc编译build_ros环境:
sudo chmod +x build_ros.sh
./build_ros.sh编译工作区间:
cd ~/catkin_ws
catkin_make
source /devel/setup.sh配置usb_cam ROS功能包
# 首先进入catkin_ws/src路径下下载功能包
cd ~/catkin_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git# 然后退回到工作空间,编译源码
cd ~/catkin_ws
catkin_make# 编译成功后将编译好的文件添加到环境变量
source devel/setup.bash# 接下来测试usb_cam,首先打开一个新的终端运行ros master
roscore# 然后在另一个终端中运行usb_cam节点
rosrun usb_cam usb_cam_node# 通过运行rostopic list可知此时实际上已经接收到硬件模块的相机输出,但是还没有显示图像
rostpoic list# 此时运行下面的命令就可以显示出此时的摄像头图像
rosrun image_view image_view image:=/usb_cam/image_raw
如果想利用一个终端在打开usb_cam节点的同时也能够看到图像,那么可以在launch文件夹下新建一个launch文件usb_cam_test.launch,然后roslaunch 文件路径/usb_cam usb_cam_test.launch
<launch><node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" > <param name="video_device" value="/dev/video0" /> <param name="image_width" value="640" /> <param name="image_height" value="480" /> <param name="pixel_format" value="yuyv" /> <param name="camera_frame_id" value="usb_cam" /> <param name="io_method" value="mmap"/> </node> <node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen"> <remap from="image" to="/usb_cam/image_raw"/> <param name="autosize" value="true" /> </node> </launch>
如果usb_cam出错:
ubutnu18.04下调用usb相机_ubuntu调用usb摄像头_weixin_44293973的博客-CSDN博客
配置kinect
参考:分别利用ubuntu18.04和ROS运行 kinect v2_qq_45792429的博客-CSDN博客
Ubuntu18.04+ROS安装Kinect V2步骤及问题解决 | 码农家园
安装依赖:
sudo apt-get install build-essential cmake pkg-config libturbojpeg libjpeg-turbo8-dev mesa-common-dev freeglut3-dev libxrandr-dev libxi-dev
sudo apt-get install libglfw3-dev
sudo apt-get install libopenni2-dev
sudo apt-get install libusb-1.0-0-dev安装libfreenect2:
git clone https://github.com/OpenKinect/libfreenect2.git
cd libfreenect2
mkdir build
cd build
cmake ..
make
sudo make install将kinect2的rules文件拷贝到udev目录下
sudo cp libfreenect2/platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/然后打开/etc/udev/rules.d/90-kinect2.rules可以看到以下内容
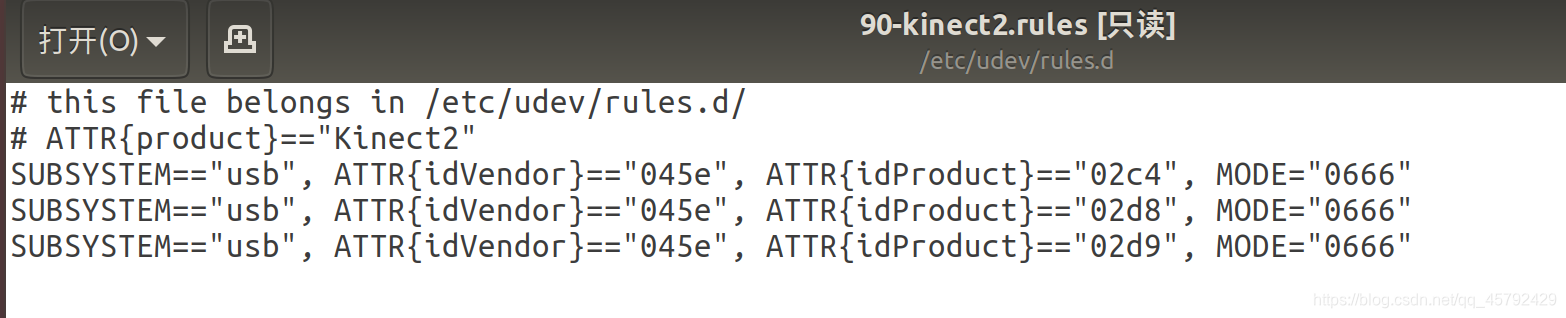
其中:045e是kinect设备号,重新连接kinect之后,终端输入指令:lsusb,应该出现以下三个信息
Bus 004 Device 003: ID 045e:02c4 Microsoft Corp.
Bus 004 Device 002: ID 045e:02d9 Microsoft Corp.
Bus 003 Device 003: ID 045e:02d9 Microsoft Corp.测试
cd libfreenect2/build
./bin/Protonect 如果遇到运行程序后死机,或者图像显示不完全的情况,尝试更新显卡驱动
自动化安装显卡驱动
ubuntu-drivers devices
sudo ubuntu-drivers autoinstall第一条命令会显示已经连接到电脑的显卡设备,并建议安装哪个版本的驱动程序
第二条命令则是自动安装所推荐的驱动程序
安装iai_kinect2库
这个包为 ROS 和 Kinect 的连接提供了必要的工具和库
cd ~/catkin_ws/src/
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths . //这一步可能会报错,好像这个报错可以忽略
cd ~/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
测试
source ~/catkin_ws/devel/setup.bash
roslaunch kinect2_bridge kinect2_bridge.launch打开另外一个终端即可看到画面:
rosrun kinect2_viewer kinect2_viewer使用rviz显示:终端输入 rosrun rviz rviz
修改“Fixed Frame”为/kinect2_rgb_optical_frame,接着点击add,选择camera类型。添加成功后选择camera菜单下的Iamge Topic选项,选择 /kinect2/hd/image_color。
接着点击add选择camera类型。添加成功后选择camera菜单下的Iamge Topic选项,选择 /camera/depth/image
参考:
ubuntu18.04运行ORB_SLAM2_alex1801的博客-CSDN博客
Ubuntu20.04配置ORBSLAM2并运行(保姆级教程)_orbslam2运行_9527风先生的博客-CSDN博客
【SLAM环境配置】基于Ubuntu18.04的ORB-SLAM2环境配置全套方案记录_Robot_Tiger_的博客-CSDN博客
相关文章:
ros下用kinectv2运行orbslam2
目录 前提 创建工作空间 orbslam2源码配置、测试: 配置usb_cam ROS功能包 配置kinect 前提 vim 、 cmake 、 git 、 gcc 、 g 这些一般都装了 主要是Pangolin 、 OpenCV 、 Eigen的安装 18.04建议Pangolin0.5 创建工作空间 我们在主目录下创建一个catkin_…...

MVP简单模型搭建【架构】
MVP简介 MVP是一种项目架构设计模式(说白了就是我们产品的一种设计方案) 其实MVP本质 就是将View和Model完全隔离,通过Presenter统一调度管理(Presenter扮演着中介的角色)传统的设计思路是我们直接跟房东谈࿰…...
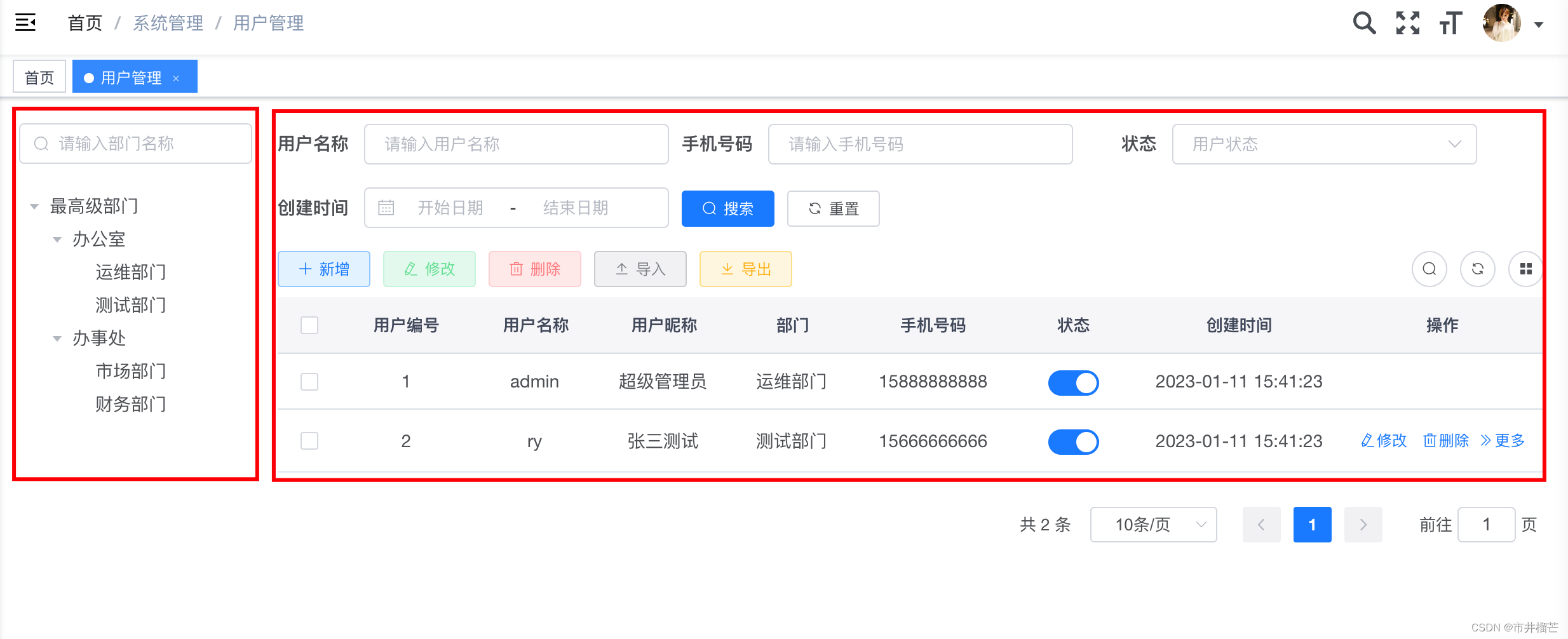
若依ruoyi框架实现目录树与查询页面联动
目录1、业务场景2、前端api.js修改index.vue修改template修改script修改3、后端controllerserviceimpldomainentitytreeselect1、业务场景 后管页面实现目录数与查询页面的联动,类似若依框架用户管理页面。 2、前端 api.js修改 在原有的js文件里配置目录树的查…...
Laravel框架学习笔记——Laravel环境配置及安装(Ubuntu20.04为例)
目录引言1、安装Nginx2、安装PHP3、安装Composer4、搭建Laravel框架项目5、修改Nginx映射6、安装MySQL引言 好久没写博客了,因为个人需要, 所以要涉及到Laravel框架的学习,所以会出一系列的关于PHP的Laravel框架学习笔记,希望能够…...
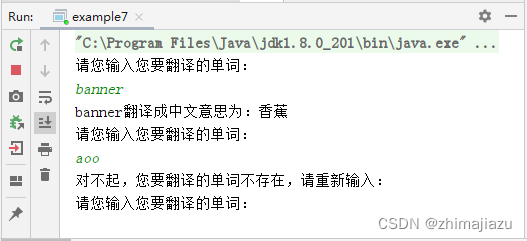
模拟百度翻译-课后程序(JAVA基础案例教程-黑马程序员编著-第六章-课后作业)
【案例6-5】 模拟百度翻译 【案例介绍】 1.任务描述 大家对百度翻译并不陌生,本案例要求编写一个程序模拟百度翻译。用户输入英文之后搜索程序中对应的中文,如果搜索到对应的中文就输出搜索结果,反之给出提示。本案例要求使用Map集合实现英…...
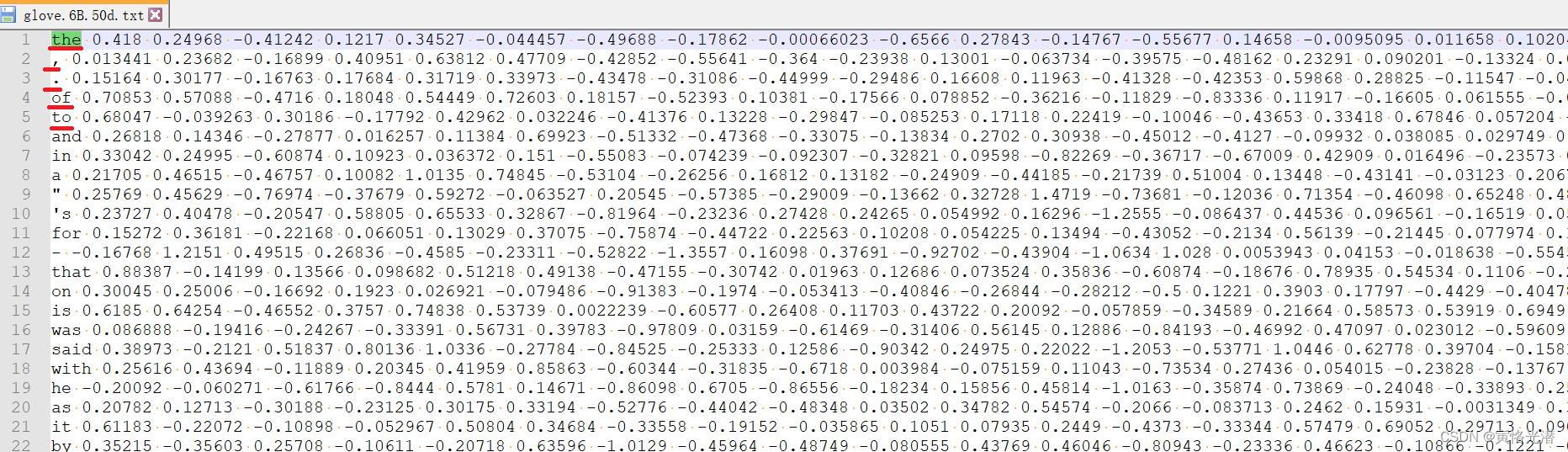
自然语言处理(NLP)之求近义词和类比词<MXNet中GloVe和FastText的模型使用>
这节主要就是熟悉MXNet框架中的两种模型:GloVe和FastText的模型(词嵌入名称),每个模型下面有很多不同的词向量,这些基本都来自wiki维基百科和twitter推特这些子集预训练得到的。我们只需要导入mxnet.contrib中的text模块即可,这里…...
)
2023年CDGA考试-第13章-数据质量(含答案)
2023年CDGA考试-第13章-数据质量(含答案) 单选题 1.在导致数据质量问题的常见原因中关于数据输入问题以下描述正确的是: A.数据采集端缺乏数据质量管控 B.相同字段重复设计导致数据不一致 C.缺乏数据采集规范的制定 D.所有描述都正确 答案 D 2.数据质量计划应将其范围限…...
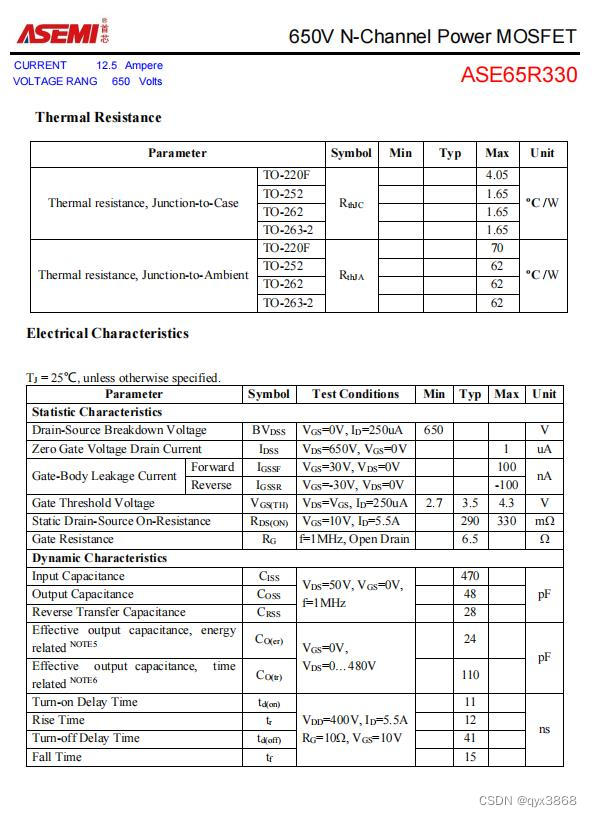
ASEMI高压MOS管ASE65R330参数,ASE65R330图片
编辑-Z ASEMI高压MOS管ASE65R330参数: 型号:ASE65R330 漏极-源极电压(VDS):650V 栅源电压(VGS):20V 漏极电流(ID):12.5A 功耗(P…...
:子序列、子数组问题)
LeetCode动态规划经典题目(九):子序列、子数组问题
目录 31. LeetCode674. 最长连续递增序列 32. LeetCode18. 最长重复子数组 33. LeetCode1143. 最长公共子序列 34. LeetCode1035. 不相交的线 35. LeetCode53. 最大子数组和 36. LeetCode392.判断子序列 37. LeetCode115. 不同的子序列 38. LeetCode583. 两个字符串的删…...

如何利用有限的数据发表更多的SCI论文?——利用ArcGIS探究环境和生态因子对水体、土壤和大气污染物的影响
SCI的写作和发表是科研人提升自身实力和实现自己价值的必要途径。“如何利用有限的数据发表更多的SCI论文?”是我们需要解决的关键问题。软件应用只是过程和手段,理解事件之间的内在逻辑和寻找事物之间的内在规律才是目的。如何利用有限的数据发表更多的…...

六【 SpringMVC框架】
一 SpringMVC框架 目录一 SpringMVC框架1.什么是MVC2.SpringMVC概述3.SpringMVC常见开发方式4.SpringMVC执行流程5.SpringMVC核心组件介绍6.快速构建Spring MVC程序✅作者简介:Java-小白后端开发者 🥭公认外号:球场上的黑曼巴 🍎个…...
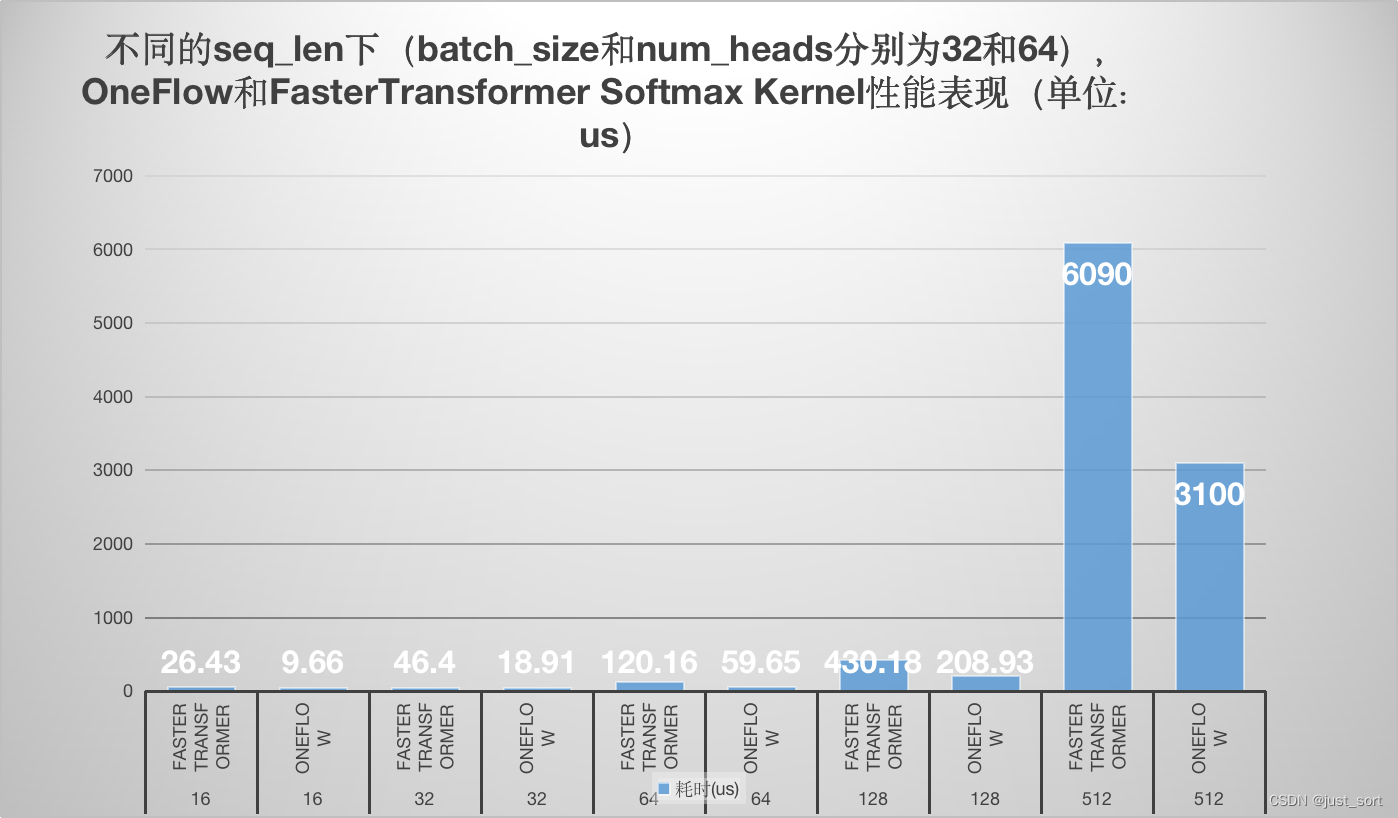
【BBuf的CUDA笔记】八,对比学习OneFlow 和 FasterTransformer 的 Softmax Cuda实现
0x1. OneFlow/FasterTransformer SoftMax CUDA Kernel 实现学习 这篇文章主要学习了oneflow的softmax kernel实现以及Faster Transformer softmax kernel的实现,并以个人的角度分别解析了原理和代码实现,最后对性能做一个对比方便大家直观的感受到onefl…...

python 类对象的析构释放代码演示
文章目录一、类的构造函数与析构函数二、代码演示1. 引用的更迭2. 只在函数内部的类对象三、函数内部返回的类对象1. 使用全局变量 引用 函数内部的类对象一、类的构造函数与析构函数 init 函数是python 类的构造函数,在创建一个类对象的时候,就会自动调…...
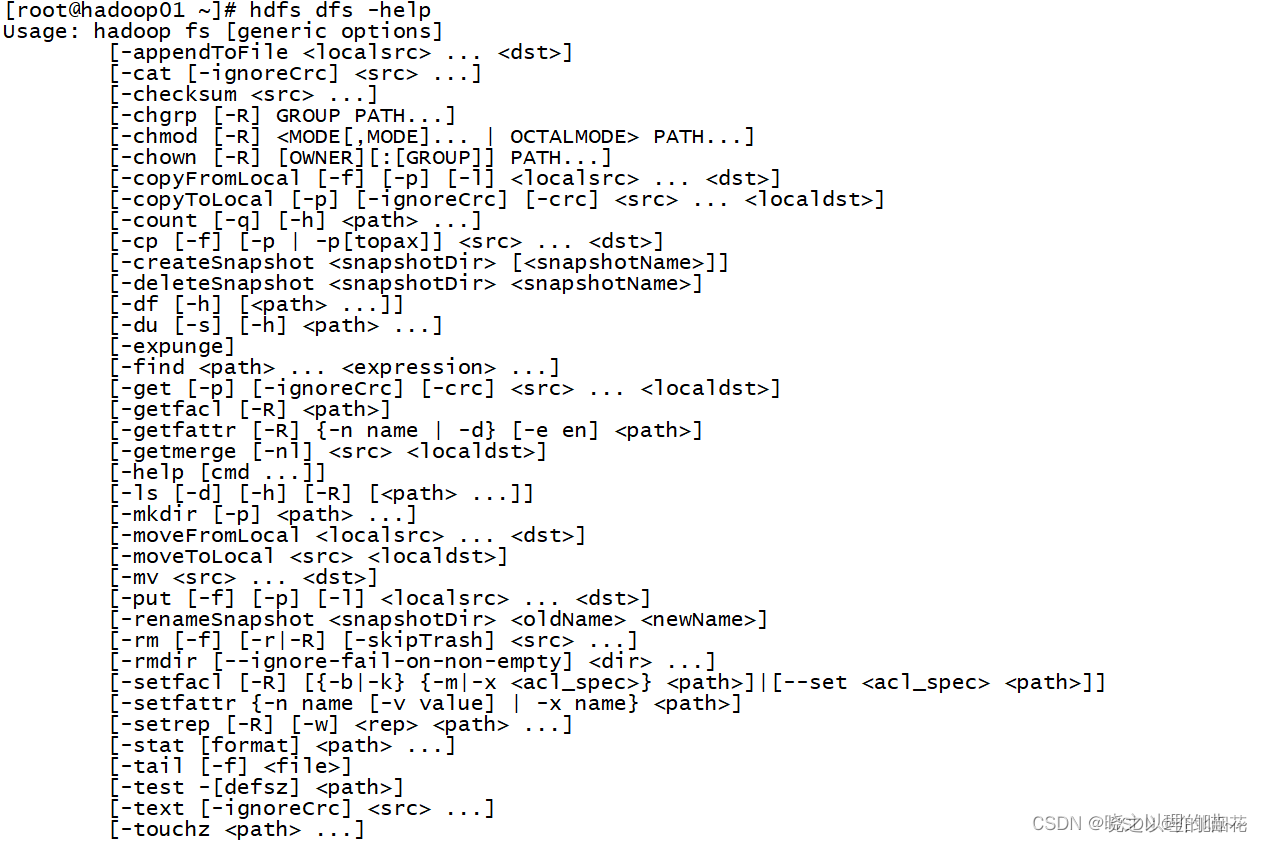
Hadoop Shell常用命令
Hadoop Shell命令在管理HDFS的时候还是比较常用的,Hadoop Shell命令与shell命令极为相似,但是方便查询,在这里总结分享,大家enjoy~~ 1,cat 语法格式:hadoop fs -cat URI [URI …] 含义:将路径…...

Android中级——色彩处理和图像处理
色彩处理 通过色彩矩阵处理 色彩矩阵介绍 图像的RGBA可拆分为一个4行5列的矩阵和5行1列矩阵相乘 其中4行5列矩阵即为ColorMatrix,可通过调整ColorMatrix间接调整RGBA 第一行 abcde 决定新的 R第二行 fghij 决定新的 G第三行 klmno 决定新的 G第四行 pqrst 决定新…...
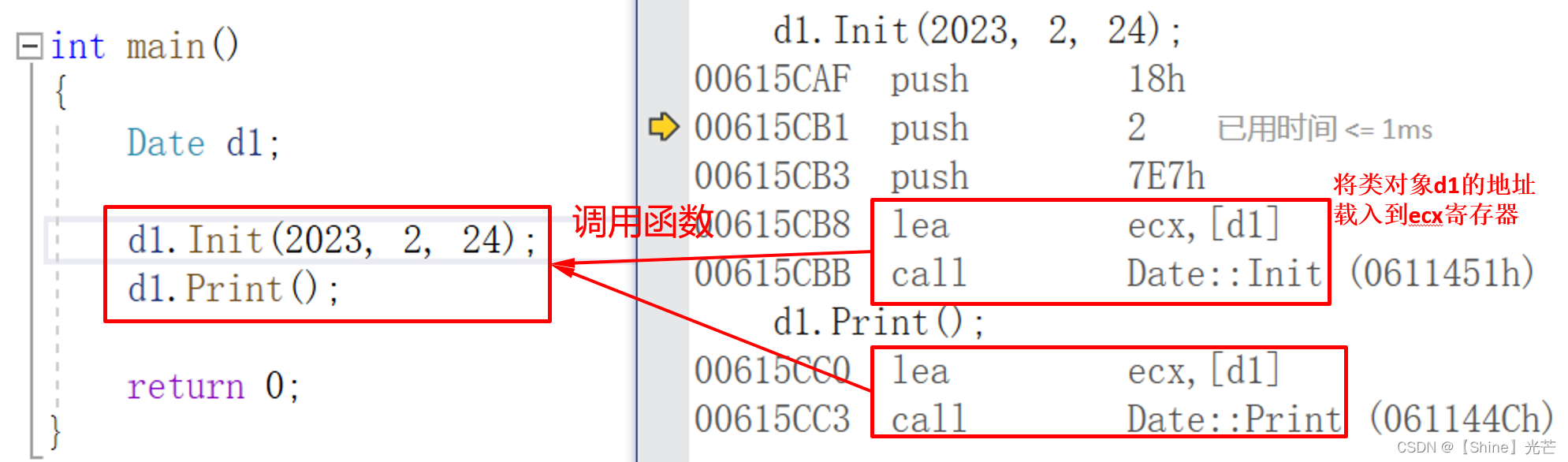
C++类和对象:类的定义、类对象的存储、this指针
目录 一. 对于面向过程和面向对象的认识 二. 类 2.1 struct关键字定义类 2.1.1 C语言中的struct关键字 2.1.2 C中的struct关键字 2.2 class关键字 2.1 使用class关键字定义类 三. 类的访问限定及封装 3.1 类的访问权限及访问限定符 3.1.1 访问权限 3.1.2 访问限定…...
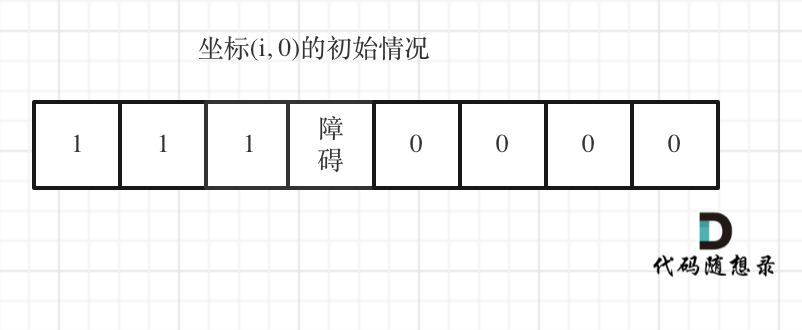
代码随想录算法训练营第三十九天 | 62.不同路径,63. 不同路径 II
一、参考资料不同路径https://programmercarl.com/0062.%E4%B8%8D%E5%90%8C%E8%B7%AF%E5%BE%84.html 视频讲解:https://www.bilibili.com/video/BV1ve4y1x7Eu不同路径 IIhttps://programmercarl.com/0063.%E4%B8%8D%E5%90%8C%E8%B7%AF%E5%BE%84II.htmlhttps://progr…...

数据库复习3
一. 简答题(共1题,100分) 1. (简答题) 存在数据库test,数据库中有如下表: 1.学生表 Student(Sno,Sname,Sage,Ssex) --Sno 学号,Sname 学生姓名,Sage 出生年月,Ssex 学生性别 主键Sno 2.教师表 Teacher(Tno,Tname) --T…...

顺序表的增删查改
数据结构 是数据存储的方式,对于不同的数据我们要采用不同的数据结构。就像交通运输,选用什么交通工具取决于你要运输的是人还是货物,以及它们的数量。 顺序存储结构 包括顺序表、链表、栈和队列等。 例如腾讯QQ中的好友列表,…...

jupyter matplotlib中文乱码解决
中文乱码可能有两种情况 1. matplotlib里面有中文字体 2. 没有中文字体 查看是否有中文字体: # 查询当前系统所有字体 from matplotlib.font_manager import FontManager import subprocessmpl_fonts = set(f.name for f in FontManager().ttflist)print(all font list get f…...
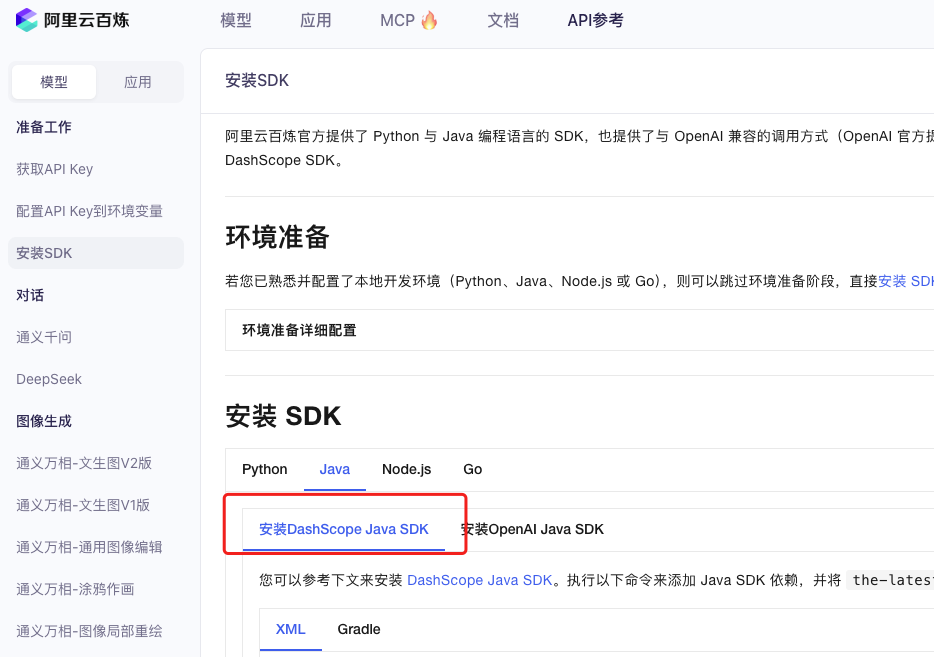
业务系统对接大模型的基础方案:架构设计与关键步骤
业务系统对接大模型:架构设计与关键步骤 在当今数字化转型的浪潮中,大语言模型(LLM)已成为企业提升业务效率和创新能力的关键技术之一。将大模型集成到业务系统中,不仅可以优化用户体验,还能为业务决策提供…...
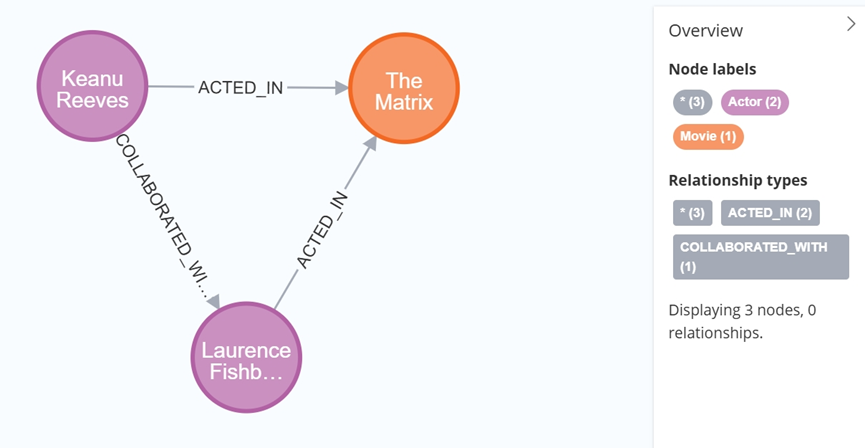
大数据学习栈记——Neo4j的安装与使用
本文介绍图数据库Neofj的安装与使用,操作系统:Ubuntu24.04,Neofj版本:2025.04.0。 Apt安装 Neofj可以进行官网安装:Neo4j Deployment Center - Graph Database & Analytics 我这里安装是添加软件源的方法 最新版…...

Vue记事本应用实现教程
文章目录 1. 项目介绍2. 开发环境准备3. 设计应用界面4. 创建Vue实例和数据模型5. 实现记事本功能5.1 添加新记事项5.2 删除记事项5.3 清空所有记事 6. 添加样式7. 功能扩展:显示创建时间8. 功能扩展:记事项搜索9. 完整代码10. Vue知识点解析10.1 数据绑…...

Leetcode 3576. Transform Array to All Equal Elements
Leetcode 3576. Transform Array to All Equal Elements 1. 解题思路2. 代码实现 题目链接:3576. Transform Array to All Equal Elements 1. 解题思路 这一题思路上就是分别考察一下是否能将其转化为全1或者全-1数组即可。 至于每一种情况是否可以达到…...
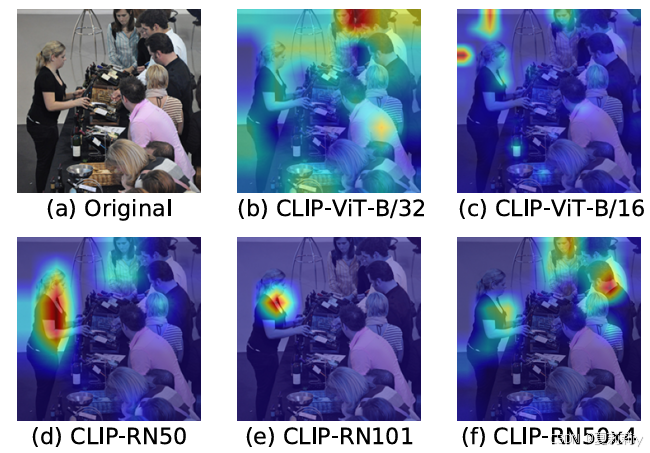
[ICLR 2022]How Much Can CLIP Benefit Vision-and-Language Tasks?
论文网址:pdf 英文是纯手打的!论文原文的summarizing and paraphrasing。可能会出现难以避免的拼写错误和语法错误,若有发现欢迎评论指正!文章偏向于笔记,谨慎食用 目录 1. 心得 2. 论文逐段精读 2.1. Abstract 2…...

基础测试工具使用经验
背景 vtune,perf, nsight system等基础测试工具,都是用过的,但是没有记录,都逐渐忘了。所以写这篇博客总结记录一下,只要以后发现新的用法,就记得来编辑补充一下 perf 比较基础的用法: 先改这…...
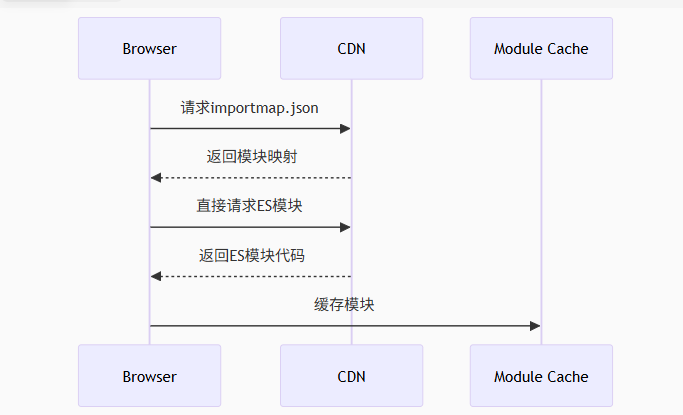
Module Federation 和 Native Federation 的比较
前言 Module Federation 是 Webpack 5 引入的微前端架构方案,允许不同独立构建的应用在运行时动态共享模块。 Native Federation 是 Angular 官方基于 Module Federation 理念实现的专为 Angular 优化的微前端方案。 概念解析 Module Federation (模块联邦) Modul…...
:邮件营销与用户参与度的关键指标优化指南)
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南 在数字化营销时代,邮件列表效度、用户参与度和网站性能等指标往往决定着创业公司的增长成败。今天,我们将深入解析邮件打开率、网站可用性、页面参与时…...

HarmonyOS运动开发:如何用mpchart绘制运动配速图表
##鸿蒙核心技术##运动开发##Sensor Service Kit(传感器服务)# 前言 在运动类应用中,运动数据的可视化是提升用户体验的重要环节。通过直观的图表展示运动过程中的关键数据,如配速、距离、卡路里消耗等,用户可以更清晰…...
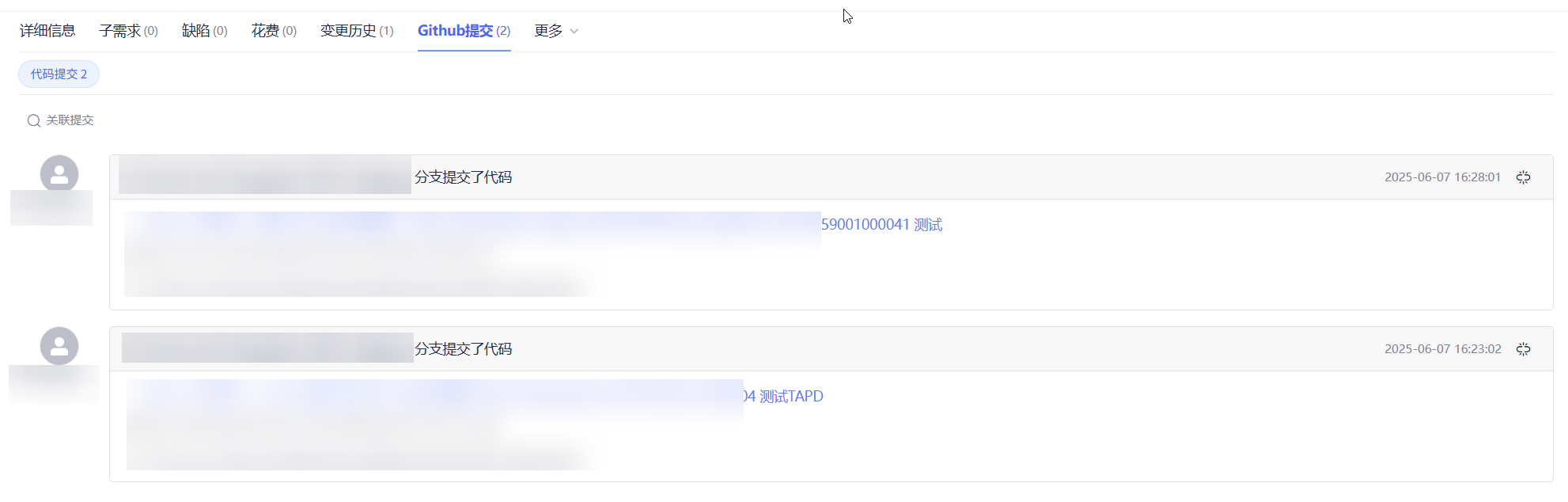
基于 TAPD 进行项目管理
起因 自己写了个小工具,仓库用的Github。之前在用markdown进行需求管理,现在随着功能的增加,感觉有点难以管理了,所以用TAPD这个工具进行需求、Bug管理。 操作流程 注册 TAPD,需要提供一个企业名新建一个项目&#…...