机器人制作开源方案 | 扫地机器人
1. 功能描述
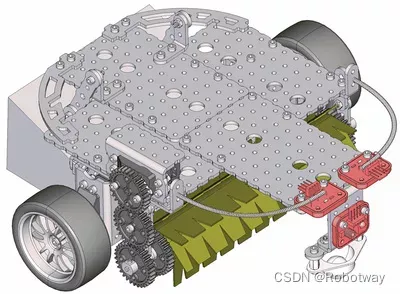
扫地机器人是现代家庭清洁的得力助手,能够自主规划清扫路径,避开障碍物,有效覆盖整个清洁区域。扫地机器人的出现极大地减轻了家庭清洁的负担,节省了时间和精力,它可以定期清理地面,确保家居环境的整洁和卫生,让家里变得更加舒适、无尘和宜居。
本文示例将实现R058a样机扫地机器人在行进过程中避障并清扫垃圾的功能。
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 传感器 | 触须传感器 |
| 近红外传感器 | |
| 电池 | 7.4V锂电池 |
3. 功能实现
编程环境:Arduino 1.8.19
下面提供一个实现扫地机器人在行进过程中避障并清扫垃圾的参考程序(sketch_sep14a.ino):
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-09-14 https://www.robotway.com/------------------------------*/#include <Servo.h>Servo left_wheel; // 左轮Servo right_wheel; // 右轮#define forward_speed_left 60 // 小车前进时,左轮速度#define forward_speed_right 120 // 小车前进时,右轮速度#define back_speed_left 120 // 小车后退时,左轮速度#define back_speed_right 60 // 小车后退时,右轮速度#define turnleft_speed_left 120 // 小车左转时,左轮速度#define turnleft_speed_right 120 // 小车左传时,右轮速度#define turnright_speed_left 60 // 小车右转时,左轮速度#define turnright_speed_right 60 // 小车右转时,右轮速度#define stop_left 90 // 小车停止时,左轮速度#define stop_right 90 // 小车停止时,右轮速度#define obstacle_threshold 500 // 触须传感器阈值#define ir_threshold 800 // 近红外传感器阈值int left_obstacle_sensor; // 左侧触须传感器int right_obstacle_sensor; // 右侧触须传感器int ir_sensor; // 近红外传感器void setup() {delay(50);Serial.begin(9600);left_wheel.attach(3); // 定义左右轮引脚right_wheel.attach(4);pinMode(A0, INPUT); // 左边触须传感器接口pinMode(A2, INPUT); // 右边触须传感器接口pinMode(A3, INPUT); // 前面近红外传感器接口}void loop() {left_obstacle_sensor = analogRead(A0); // 读取左边触须传感器值right_obstacle_sensor = analogRead(A2); // 读取右边触须传感器值ir_sensor = analogRead(A3); // 读取近红外传感器值// 如果左边传感器检测到障碍物,执行后退并向右转操作if (left_obstacle_sensor > obstacle_threshold) {backRight();}// 如果右边传感器检测到障碍物,执行后退并向左转操作else if (right_obstacle_sensor > obstacle_threshold) {backLeft();}// 如果前面近红外传感器检测到障碍物,执行后退操作else if (ir_sensor > ir_threshold) {back();}// 如果都没有检测到障碍物,执行前进操作else {forward();}}// 小车前进void forward() {left_wheel.write(forward_speed_left);right_wheel.write(forward_speed_right);}// 小车后退void back() {left_wheel.write(back_speed_left);right_wheel.write(back_speed_right);}// 小车后退左转void backLeft() {left_wheel.write(back_speed_left);right_wheel.write(turnleft_speed_right);}// 小车后退右转void backRight() {left_wheel.write(turnright_speed_left);right_wheel.write(back_speed_right);}// 小车停止void stop() {left_wheel.write(stop_left); // 停止right_wheel.write(stop_right); // 停止}4. 扩展样机
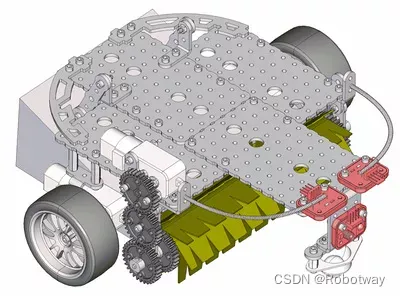
本样机有一些简单的扩展案例,如下图所示将舵机更换为直流电机:
程序源代码及样机3D文件等资料详见 扫地机器人
相关文章:
机器人制作开源方案 | 扫地机器人
1. 功能描述 扫地机器人是现代家庭清洁的得力助手,能够自主规划清扫路径,避开障碍物,有效覆盖整个清洁区域。扫地机器人的出现极大地减轻了家庭清洁的负担,节省了时间和精力,它可以定期清理地面,确保家居环…...
10.2手动推导linux中file, cdev, inode之间的关系
是时候可以手动推导一下linux里面基类父类和子类的关系了 代码放最后把 简单说明版 详细流程 第一步注册驱动 cdev结构体能看做是一个基类,那么链表里面都是字符设备驱动的cdev连载一起,啥串口,lcd的,通过cdev->list_head连接 那cdev结构体里有主次设备号 第一步 使用r…...
JavaScript基础知识13——运算符:一元运算符,二元运算符
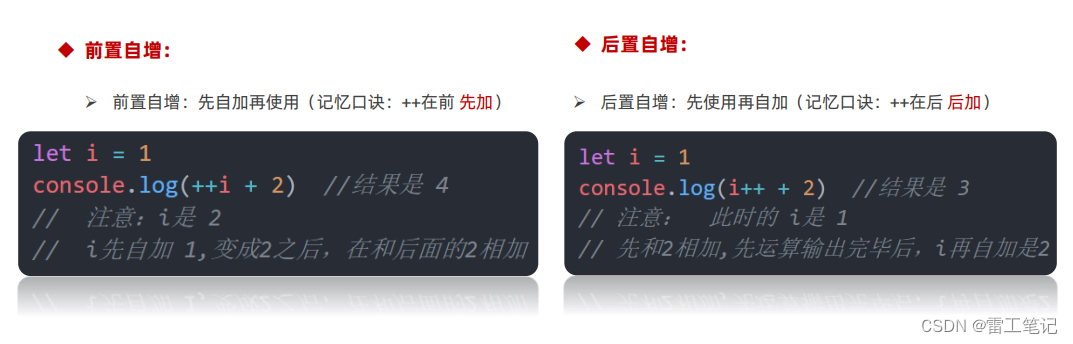
哈喽,大家好,我是雷工。 JavaScript的运算符可以根据所需表达式的个数,分为一元运算符、二元运算符、三元运算符。 一、一元运算符 1、一元运算符:只需要一个表达式就可以运算的运算符。 示例:正负号 一元运算符有两…...
异步使用langchain
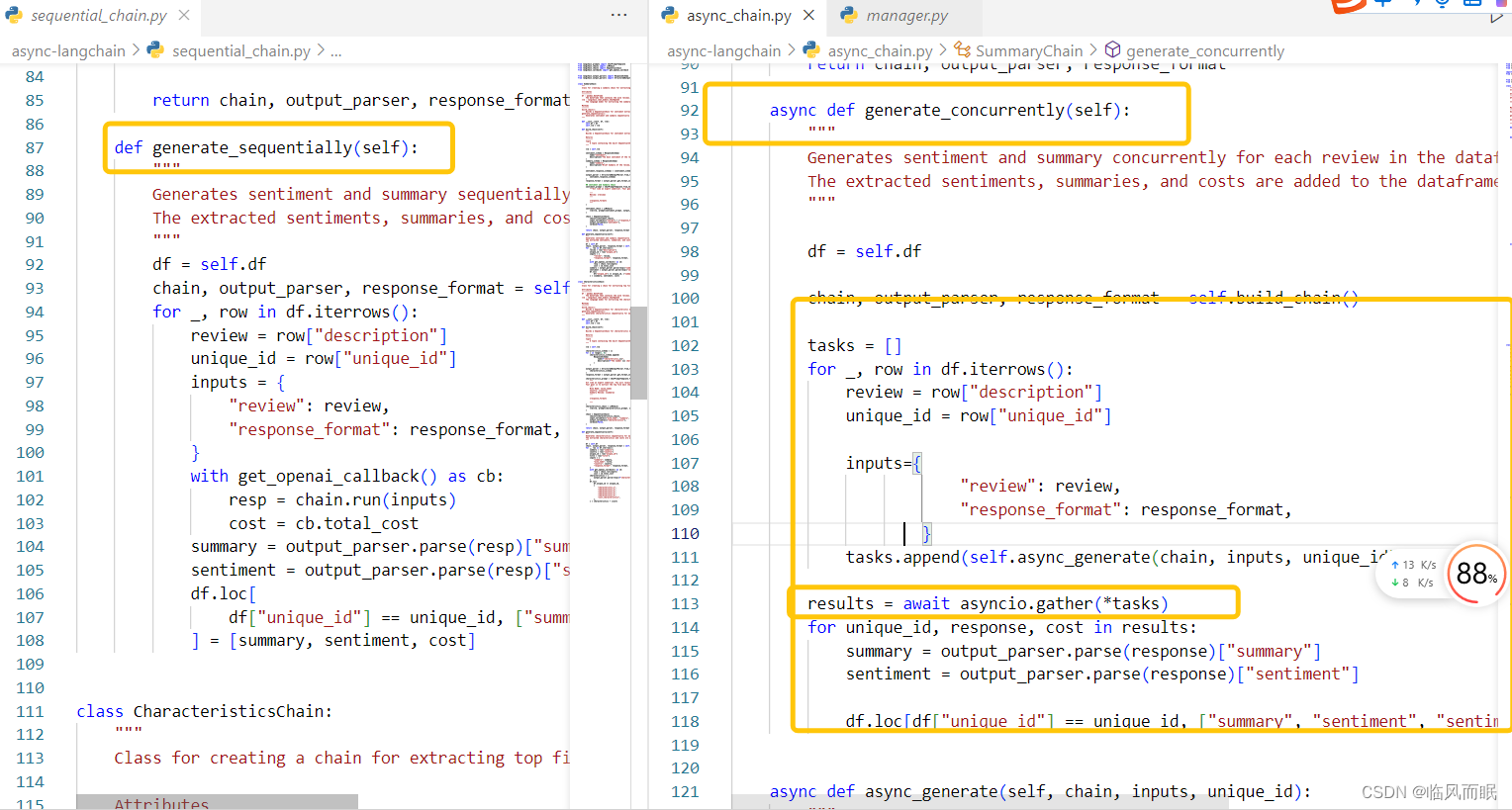
文章目录 一.先利用langchain官方文档的AI功能问问二.langchain async api三.串行,异步速度比较 一.先利用langchain官方文档的AI功能问问 然后看他给的 Verified Sources 这个页面里面虽然有些函数是异步函数,但是并非专门讲解异步的 二.langchain asy…...
抖音开放平台第三方代小程序开发,授权事件、消息与事件通知总结
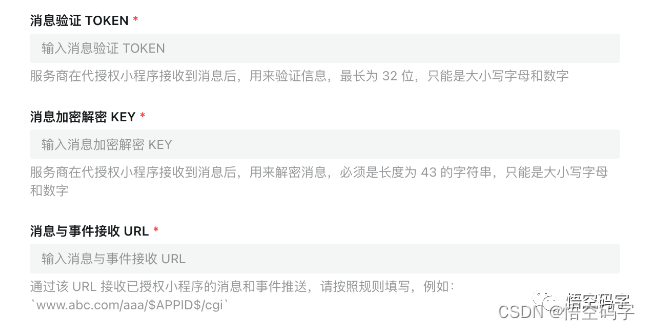
大家好,我是小悟 关于抖音开放平台第三方代小程序开发的两个事件接收推送通知,是开放平台代小程序实现业务的重要功能。 授权事件推送和消息与事件推送类型都以Event的值判断。 授权事件推送通知 授权事件推送包括:推送票据、授权成功、授…...
华为9.20笔试 复现
第一题 丢失报文的位置 思路:从数组最小索引开始遍历 #include <iostream> #include <vector> using namespace std; // 求最小索引值 int getMinIdx(vector<int> &arr) {int minidx 0;for (int i 0; i < arr.size(); i){if (arr[i] …...
二十五、【色调调整基础】
文章目录 1、亮度/对比度a、亮度b、对比度 2、曝光度3、阈值4、色阶5、反相6、黑白7、渐变映射 1、亮度/对比度 a、亮度 亮度是指画面的明亮程度 b、对比度 对比度指的是一幅图像中,明暗区域最亮和最暗之间不同亮度层级的测量,如下图所示࿰…...
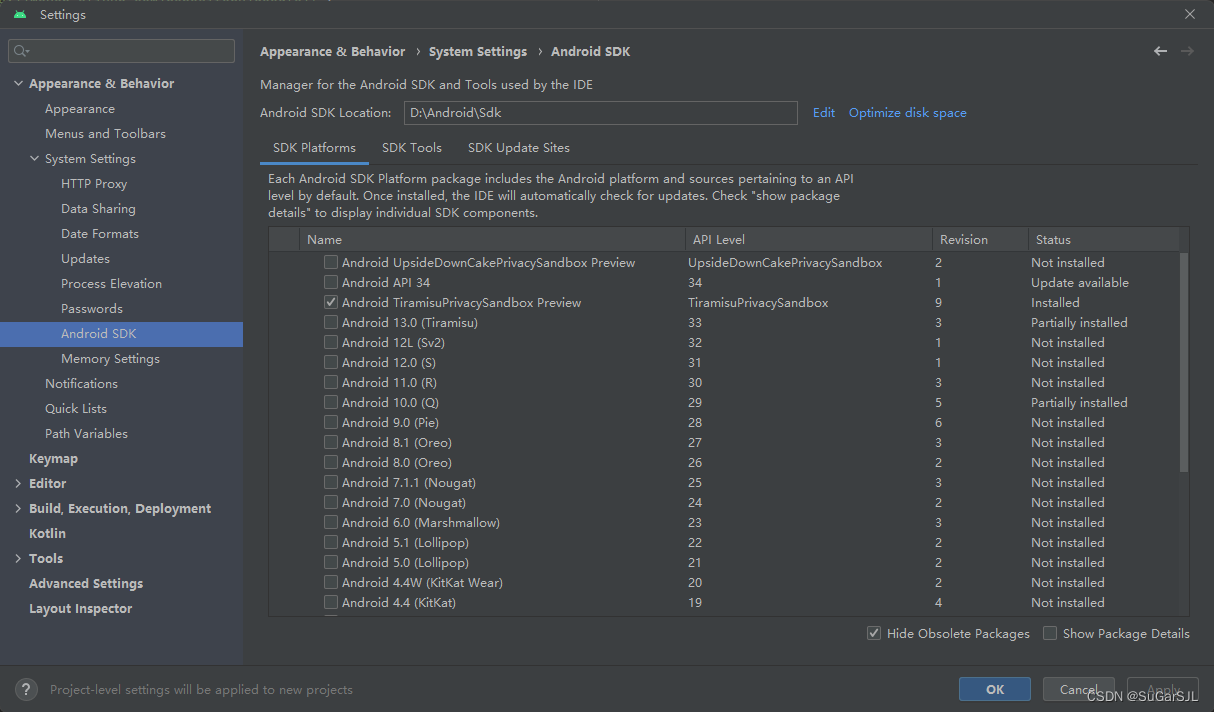
Android Studio SDK manager加载packages不全
打开Android Studio里的SDK manager,发现除了已安装的,其他的都不显示。 解决方法: 设置代理: 方便复制> http://mirrors.neusoft.edu.cn/ 重启Android Studio...

[esp32-wroom]基础开发
1、点亮LED灯 int led_pin2; void setup() {// put your setup code here, to run once:pinMode(led_pin,OUTPUT);}void loop() {// put your main code here, to run repeatedly:digitalWrite(led_pin,HIGH);delay(1000);digitalWrite(led_pin,LOW);delay(1000); } 2、LED流…...

利用Docker 实现 MiniOB环境搭建
官方文档有,但是感觉写的跟shift一样(或者是我的阅读理解跟shift一样 下面是自己的理解 一.下载docker 这个去官网下载安装,没什么说的 Docker: Accelerated Container Application Development 二.用docker下载MiniOB环境 1.打开powershell ( win r ,然后输入powershell…...

【DB2】—— 数据库表查询一直查不出来数据
问题描述 近日,数据库的测试环境中有一个打印日志表,一共有将近50w的数据,Java程序在查询的时候一直超时。 在DBvisualizer中查询数据无论是使用select * 还是 select count(*)查询的时候都是一直在执行,就是查询不到结果。 排查…...

【教程】使用vuepress构建静态文档网站,并部署到github上
官网 快速上手 | VuePress (vuejs.org) 构建项目 我们跟着官网的教程先构建一个demo 这里我把 vuepress-starter 这个项目名称换成了 howtolive 创建并进入一个新目录 mkdir howtolive && cd howtolive使用你喜欢的包管理器进行初始化 yarn init 这里的问题可以一…...

python 机器视觉 车牌识别 - opencv 深度学习 机器学习 计算机竞赛
1 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 基于python 机器视觉 的车牌识别系统 🥇学长这里给一个题目综合评分(每项满分5分) 难度系数:3分工作量:3分创新点:3分 🧿 更多资…...
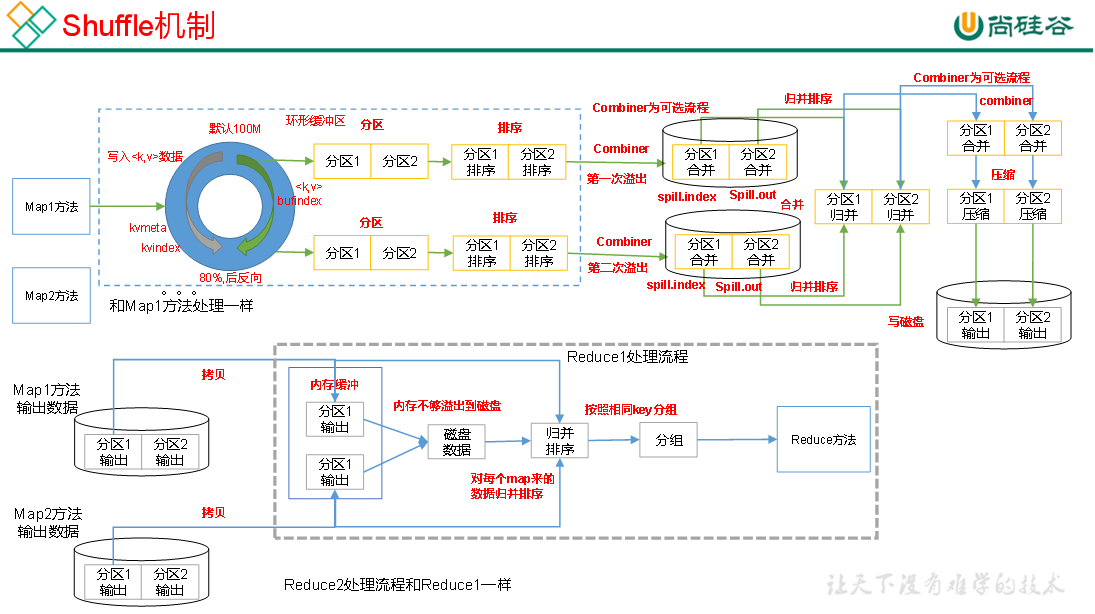
Hadoop3教程(十二):MapReduce中Shuffle机制的概述
文章目录 (95) Shuffle机制什么是shuffle?Map阶段Reduce阶段 参考文献 (95) Shuffle机制 面试的重点 什么是shuffle? Map方法之后,Reduce方法之前的这段数据处理过程,就叫做shuff…...

MySQL为什么用b+树
索引是一种数据结构,用于帮助我们在大量数据中快速定位到我们想要查找的数据。 索引最形象的比喻就是图书的目录了。注意这里的大量,数据量大了索引才显得有意义,如果我想要在[1,2,3,4]中找到4这个数据,直接对全数据检索也很快&am…...

浅谈机器学习中的概率模型
浅谈机器学习中的概率模型 其实,当牵扯到概率的时候,一切问题都会变的及其复杂,比如我们监督学习任务中,对于一个分类任务,我们经常是在解决这样一个问题,比如对于一个n维的样本 X [ x 1 , x 2 , . . . .…...

MySQL 函数 索引 事务 管理
目录 一. 字符串相关的函数 二.数学相关函数 编辑 三.时间日期相关函数 date.sql 四.流程控制函数 centrol.sql 分页查询 使用分组函数和分组字句 group by 数据分组的总结 多表查询 自连接 子查询 subquery.sql 五.表的复制 六.合并查询 七.表的外连接 …...

Flink如何基于事件时间消费分区数比算子并行度大的kafka主题
背景 使用flink消费kafka的主题的情况我们经常遇到,通常我们都是不需要感知数据源算子的并行度和kafka主题的并行度之间的关系的,但是其实在kafka的主题分区数大于数据源算子的并行度时,是有一些注意事项的,本文就来讲解下这些注…...
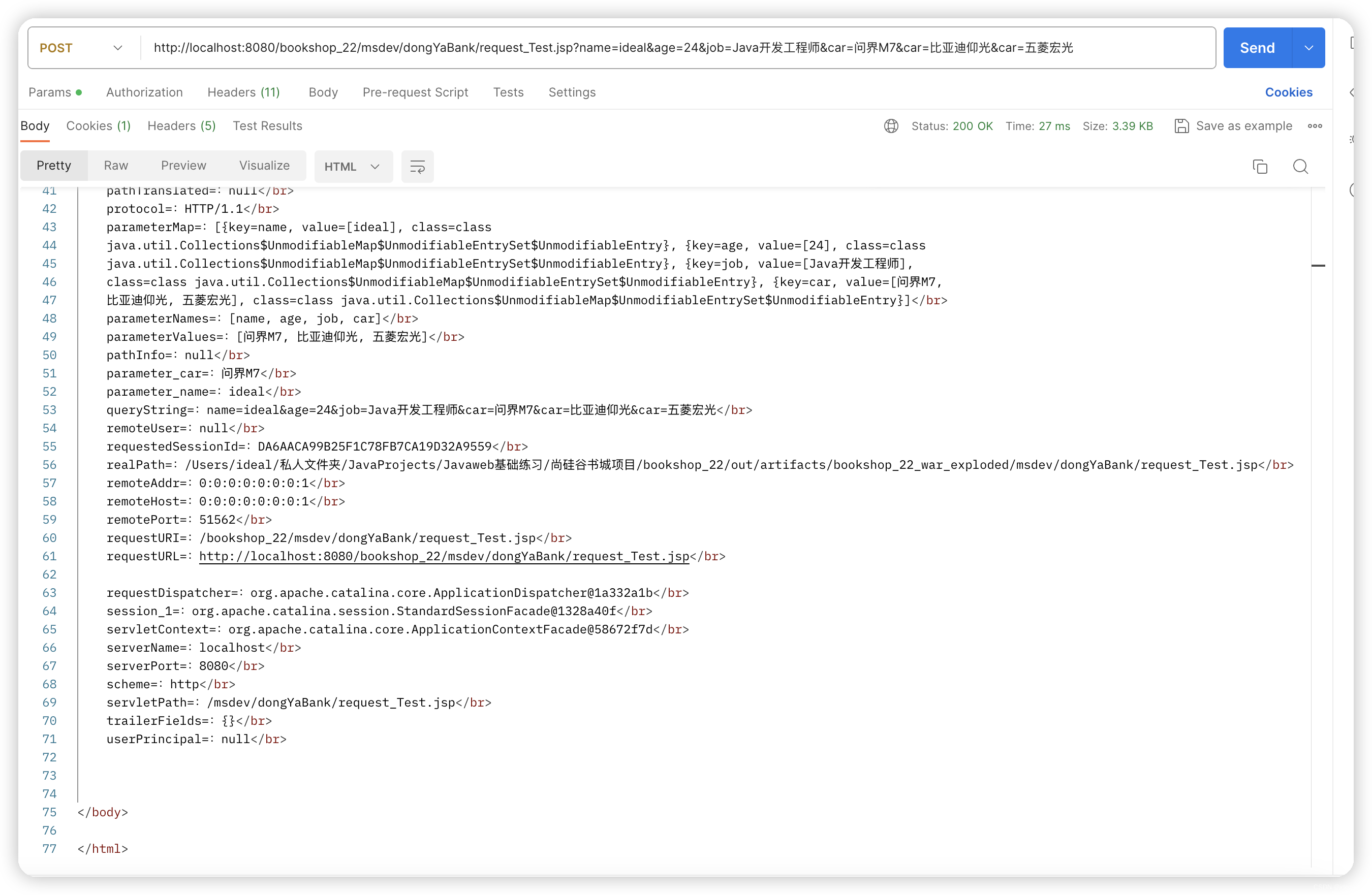
总结:JavaEE的Servlet中HttpServletRequest请求对象调用各种API方法结果示例
总结:JavaEE的Servlet中HttpServletRequest请求对象调用各种API方法结果示例 一方法调用顺序是按照英文字母顺序从A-Z二该示例可以用作servlet中request的API参考,从而知道该如何获取哪些路径参数等等三Servlet的API版本5.0.0、JSP的API版本:…...
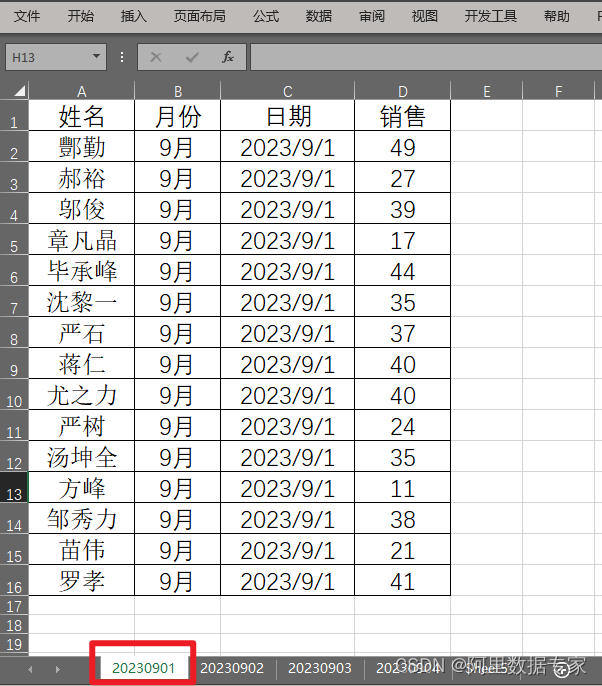
ChatGPT AIGC 完成Excel跨多表查找操作vlookup+indirect
VLOOKUP和INDIRECT的组合在Excel中用于跨表查询,其中VLOOKUP函数用于在另一张表中查找数据,INDIRECT函数则用于根据文本字符串引用不同的工作表。具体操作如下: 1.假设在工作表1中,A列有你要查找的值,B列是你希望查询的工作表名称。 2.在工作表1的C列输入以下公式:=VLO…...
)
uniapp 对接腾讯云IM群组成员管理(增删改查)
UniApp 实战:腾讯云IM群组成员管理(增删改查) 一、前言 在社交类App开发中,群组成员管理是核心功能之一。本文将基于UniApp框架,结合腾讯云IM SDK,详细讲解如何实现群组成员的增删改查全流程。 权限校验…...
大话软工笔记—需求分析概述
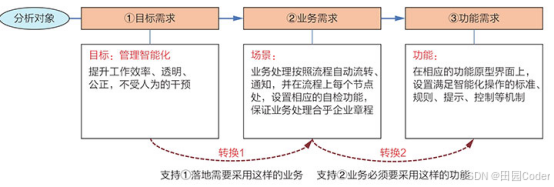
需求分析,就是要对需求调研收集到的资料信息逐个地进行拆分、研究,从大量的不确定“需求”中确定出哪些需求最终要转换为确定的“功能需求”。 需求分析的作用非常重要,后续设计的依据主要来自于需求分析的成果,包括: 项目的目的…...

工业安全零事故的智能守护者:一体化AI智能安防平台
前言: 通过AI视觉技术,为船厂提供全面的安全监控解决方案,涵盖交通违规检测、起重机轨道安全、非法入侵检测、盗窃防范、安全规范执行监控等多个方面,能够实现对应负责人反馈机制,并最终实现数据的统计报表。提升船厂…...
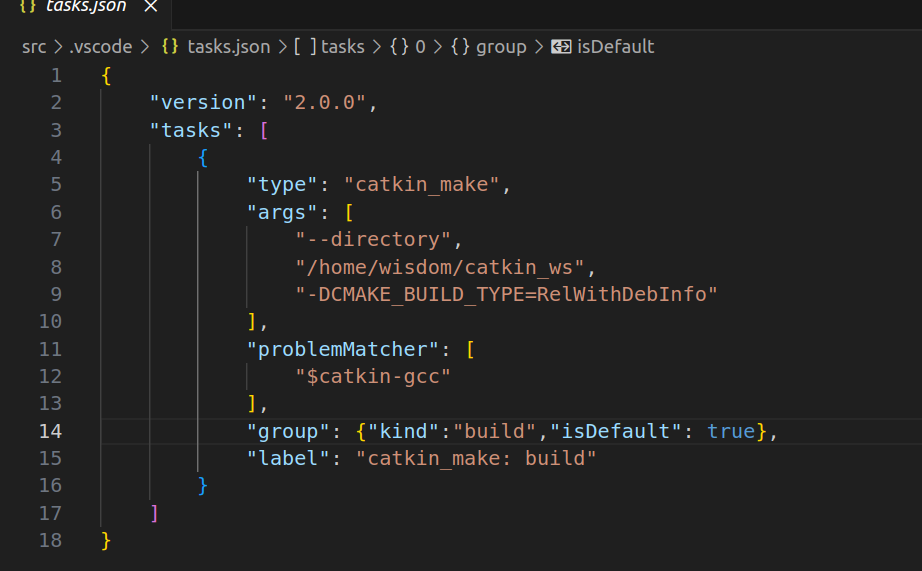
1.3 VSCode安装与环境配置
进入网址Visual Studio Code - Code Editing. Redefined下载.deb文件,然后打开终端,进入下载文件夹,键入命令 sudo dpkg -i code_1.100.3-1748872405_amd64.deb 在终端键入命令code即启动vscode 需要安装插件列表 1.Chinese简化 2.ros …...

如何为服务器生成TLS证书
TLS(Transport Layer Security)证书是确保网络通信安全的重要手段,它通过加密技术保护传输的数据不被窃听和篡改。在服务器上配置TLS证书,可以使用户通过HTTPS协议安全地访问您的网站。本文将详细介绍如何在服务器上生成一个TLS证…...
ElasticSearch搜索引擎之倒排索引及其底层算法
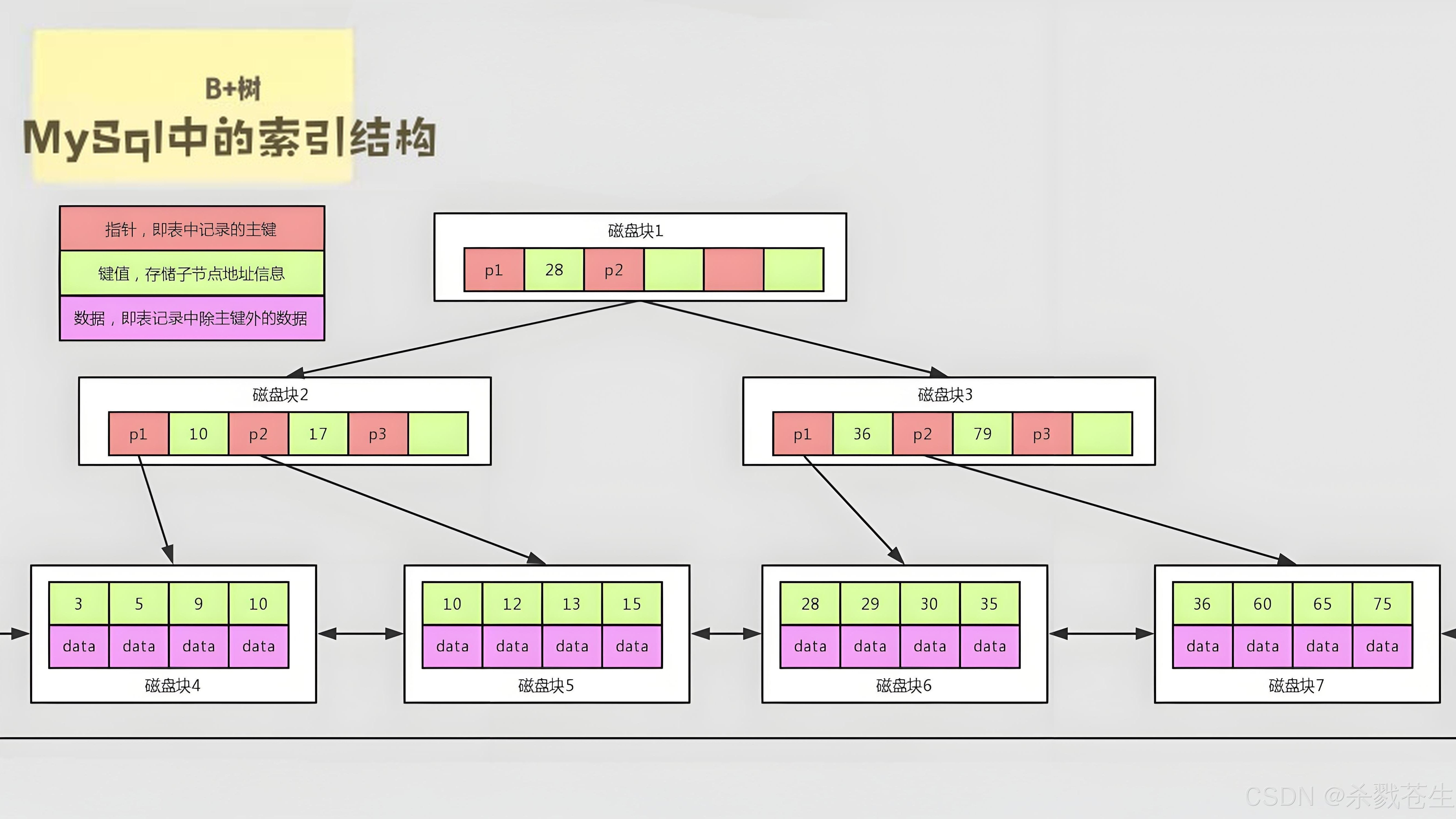
文章目录 一、搜索引擎1、什么是搜索引擎?2、搜索引擎的分类3、常用的搜索引擎4、搜索引擎的特点二、倒排索引1、简介2、为什么倒排索引不用B+树1.创建时间长,文件大。2.其次,树深,IO次数可怕。3.索引可能会失效。4.精准度差。三. 倒排索引四、算法1、Term Index的算法2、 …...
SpringCloudGateway 自定义局部过滤器
场景: 将所有请求转化为同一路径请求(方便穿网配置)在请求头内标识原来路径,然后在将请求分发给不同服务 AllToOneGatewayFilterFactory import lombok.Getter; import lombok.Setter; import lombok.extern.slf4j.Slf4j; impor…...
自然语言处理——循环神经网络
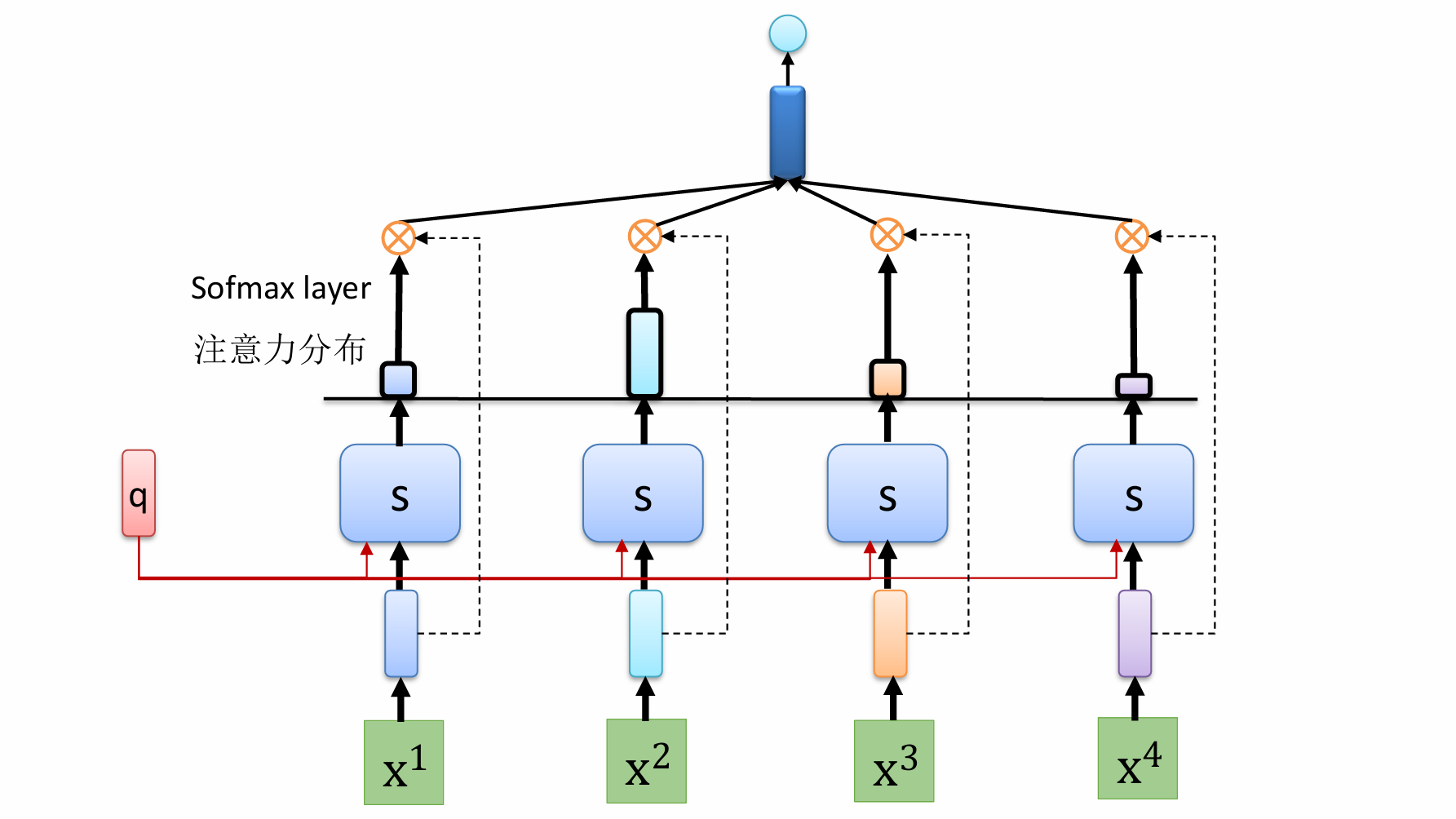
自然语言处理——循环神经网络 循环神经网络应用到基于机器学习的自然语言处理任务序列到类别同步的序列到序列模式异步的序列到序列模式 参数学习和长程依赖问题基于门控的循环神经网络门控循环单元(GRU)长短期记忆神经网络(LSTM)…...
【论文阅读28】-CNN-BiLSTM-Attention-(2024)
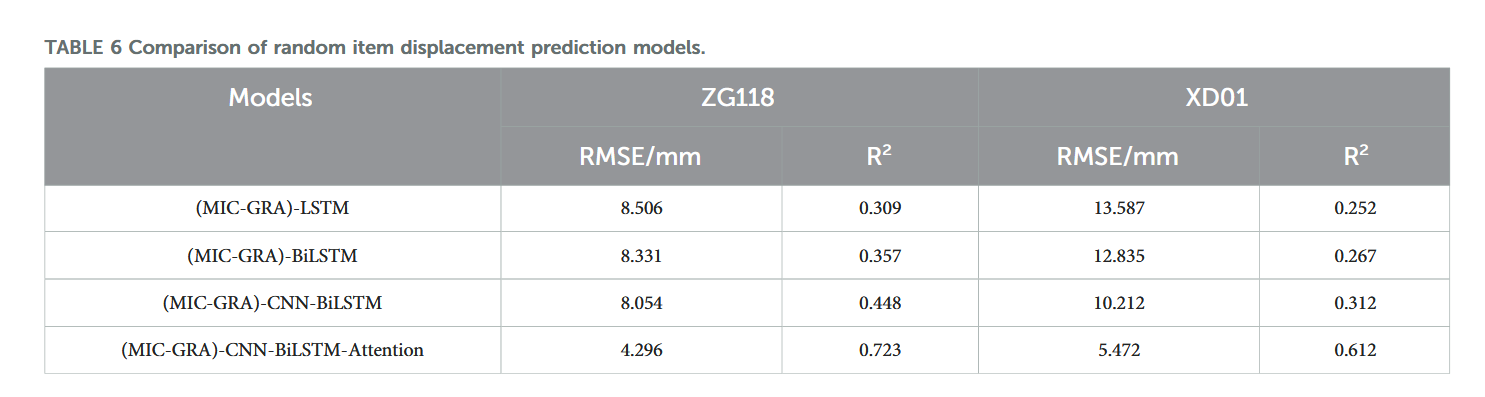
本文把滑坡位移序列拆开、筛优质因子,再用 CNN-BiLSTM-Attention 来动态预测每个子序列,最后重构出总位移,预测效果超越传统模型。 文章目录 1 引言2 方法2.1 位移时间序列加性模型2.2 变分模态分解 (VMD) 具体步骤2.3.1 样本熵(S…...
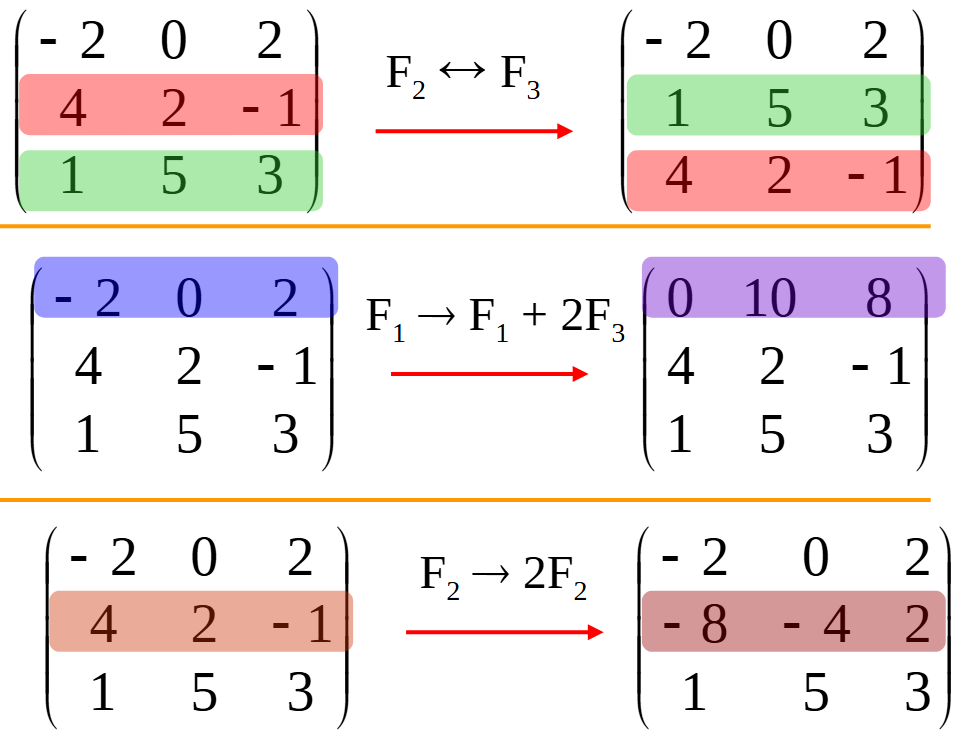
使用 SymPy 进行向量和矩阵的高级操作
在科学计算和工程领域,向量和矩阵操作是解决问题的核心技能之一。Python 的 SymPy 库提供了强大的符号计算功能,能够高效地处理向量和矩阵的各种操作。本文将深入探讨如何使用 SymPy 进行向量和矩阵的创建、合并以及维度拓展等操作,并通过具体…...