基于单片机的太阳跟踪系统的设计
欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。 技术交流认准下方 CSDN 官方提供的联系方式
文章目录
- 概要
- 一、设计的主要内容
- 二、硬件电路设计
- 2.1跟踪控制方案的选择
- 2.1.1跟踪系统坐标系的选择
- 2.2系统总体设计及相关硬件介绍
- 三、软件设计
- 3.1系统主程序设计
- 原理图
- 源程序清单
- 四、结论
- 五、 文章目录
概要
根据太阳与地球的相对运动规律和赤道坐标系和地平坐标系下太阳相对于地球的运动轨道,以应用价值为前提,提出了以步进电机为驱动机构的开环跟踪控制策略,并设计了相应的控制系统。根据控制系统的要求,本文选用了AT89C51RC单片机作为核心部件,完成了单片机的外围硬件电路设计和相应的软件设计。文中详细介绍了系统硬件电路中的重要器件及其实现的功能,设计了相应的硬件接口电路,主要包括复位电路,I2C串行通信电路和步进电机驱动电路,并以软件流程图的形式详细说明了本文的软件设计思想。
关键词: 太阳能热发电;太阳跟踪;单片机;开环跟踪
一、设计的主要内容
由于太阳相对于聚光器的位置时刻都在改变,这就要求聚光器不断改变自身的方位,实时保持太阳处于太阳能聚光器的主光轴上,即始终对准太阳,以有限的接收面积捕获尽可能多的太阳辐射能。要保持太阳始终处于聚光器的主光轴上,就必须采用跟踪系统。本论文将设计和开发一套用于太阳能热发电的跟踪控制系统。
论文设计的主要内容包括硬件设计和软件设计两部分。
硬件部分:
① 复位电路。
② I2C通信电路,包括外围总线、键盘显示芯片和日历时钟芯片的连接。
③ 步进电机模块电路,包括反向驱动器,步进电机驱动器的连接。
④ 绘制系统的总体电路图。
软件系统包括:
① 系统总设计流程图及其程序。
② I2C通信模块软件设计,包括I2C总线连接图,初始化流程图,按键处理流程图和时间调整流程图及程序。
③ 步进电机的软件设计,包括计算模块流程图和步进电机模块流程图。
二、硬件电路设计
2.1跟踪控制方案的选择
2.1.1跟踪系统坐标系的选择
在太阳能热发电系统中,支架不仅要支撑起聚光器,还要支撑起安置在聚光器焦点位置的一台数吨重的发动机。如果采用极轴坐标系统,虽然跟踪的方式简单,但是聚光器的重量并不通过极轴轴线,极轴支撑装置的设计难度大。所以本设计不采用极轴坐标系统。
对于较大的系统,工程上常采用地平坐标系统。采用地平坐标系统的一个特殊优点是重力平面保持在通过收集器的垂直平面内,这样把收集器表面的重力偏差减到最小,就可以使收集器及其支架的工程设计的复杂性简化到最低限度,收集器的轴和轴承所受的力矩也减到最小。故采用地平坐标系统的收集器支撑结构比较简单。
2.1.2跟踪方式及跟踪系统的选择
跟踪控制方式分为闭环跟踪、开环跟踪和混合跟踪控制方式三种。
闭环跟踪和开环跟踪控制方式的主要区别是有无反馈信息。混合跟踪控制方式将闭环跟踪和开环跟踪相结合的跟踪控制方式,混合跟踪控制方式。混合跟踪方式有闭环跟踪方式的优点也同样具备开环方式的优点。如果采用高性能的传感器用于光电跟踪模块,无疑将大大提高跟踪系统的造价,这是在工业生产中所不愿看到的;如果采用普通的传感器,则跟踪系统会存在的缺点为反应慢、精度差、稳定性低,且闭环跟踪无法适用多云天气。根据当地的经度纬度,日期和时间,采用开环控制方式,通过数学上对太阳轨道的计算,得到下一时刻收集器的位置。这样可以通过电动驱动收集器,保持太阳始终处于收集器的主光轴上。按轨道跟踪太阳,不受天气限制。如此一来也存在一个缺点是时间长了,系统的累积误差的影响越来越大,跟踪效果会明显下降。
因为步进电机只有周期性的误差而无累积误差,所以步进电机在非超载的情况下,其转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。因此,采用步进电机作为跟踪系统的执行机构,可有效控制系统的累积误差。
本论文控制方式采用开环的程序控制,分别对太阳高度角和方位角进行二维跟踪,执行机构采用步进电机。
2.2系统总体设计及相关硬件介绍
系统示意图如图2-l所示,单片机是控制系统的核心,键盘显示芯片作为键盘指令输入和相关数据显示的驱动器管理着键盘和显示器,日历时钟芯片为系统提供了一个准确的时钟作为时间标准;步进电机驱动器间接控制着步进电机。相关硬件接口电路主要包括复位电路,I2C通信电路和步进电机模块电路。本文将对所选用的单片机以及主要硬件电路展开说明。
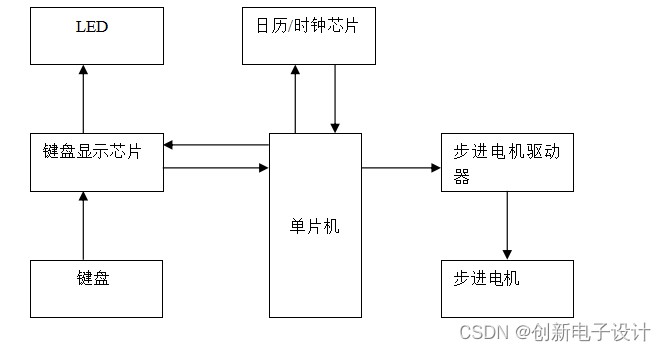
图2-1 系统示意图
综合考虑本系统对单片机功能的要求,本文选用美国ATMEL公司的AT89C51RC单片机,该单片机具有以下特性:
AT89C51RC是在AT89C52基础上开发的新型单片机。它的主要特性是:
●片内含有32KB的Flash程序存储器,擦写周期为1000次;
●片内数据存储器内含512字节的RAM;
●具有可编程32线I/O口(P0,P1,P2和P3);
●具有3个可编程定时器TO,T1和T2;
●中断系统是具有8个中断源、6个中断矢量、2级中断优先权的中断结构;
●具有一个全双工UART串行口;
●低功耗工作方式为空闲模式和掉电模式;
●具有双数据指针DPTR0和DPTRl;
●具有3级程序锁定位;
●具有硬件看门狗定时器WDT;
●AT89C5 1 RC工作电源为4.0-5.5V;
●AT89C5lRC最高工作频率为33MHz;
●具有断电标志POF。
AT89C51RC单片机PDIP封装的引脚排列如图2-2所示。
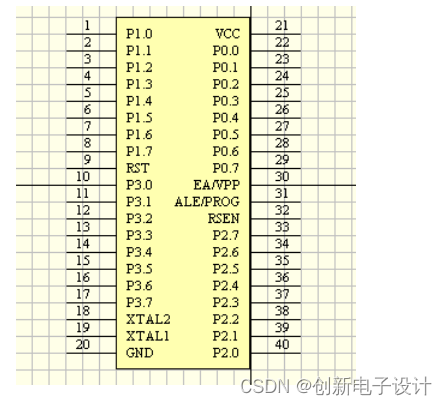
图2-2 AT89C51RC引脚图
三、软件设计
3.1系统主程序设计
本控制系统软件设计的主程序流程如图3-1所示,主要分为I2C串行通信模块、角度计算模块和步进电机模块。
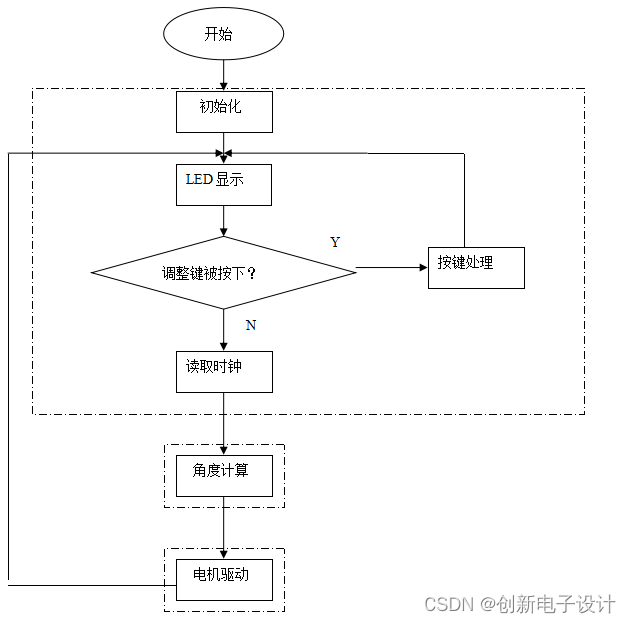
图3-1 主程序流程图
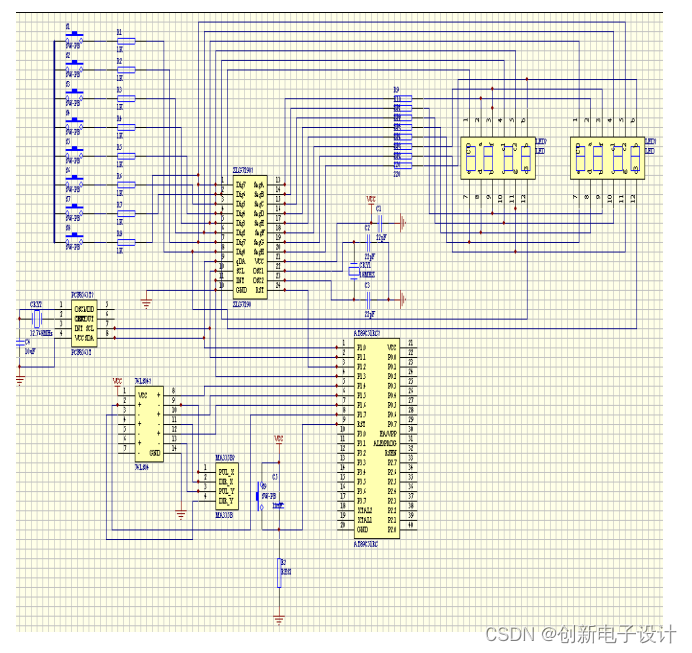
原理图
源程序清单
附录2 源程序清单
主程序:
#include“reg52.h”
#include“VI2C_C5 I.H” / /包含VI2C软件包
#include“zlg7290.h”
#include“fgangel.h”
#include“motorun.h”
#include“manregstep.h”
#include<math.h>
#define PCF8563 0xA2
#define WRADDR 0x00
#define RDADDR 0x02
#define settime l
#define setdata 2
#define setlongitude 3
#define tran 4
#define up 5
#define down 6
#define left 7
#define ok 8
#define uint unsigned int
#define uchar unsigned char
sbit KEY_ INT=P3^2;
sbit RST=P1^2;
unsigned char disp_buf[8]={0,0,0,0,0,0,0,0};
unsigned char KEY;
float *fg;
bit switch date=0;
bit longtpn;
struct longitude
{
uint longtitudehour;,
uchar longtitudemin;
uchar longtitudesec;
};struct time
{
uchar hour;
uchar min;
uchar see;
}idata lconvtime;
struct longitude idata Lloc={116,28,0};
unsigned char loncontime(struct longitude idata*Lstal,struct longitude idata*LLloc);
···································
if(KEY==setdata) //is setdam?
{
IRcvStr(PCF8563,RDADDR,rd,Ox7);//读现在的时、分、秒
display_date(rd+3);
disp butl2]2disp_buf[2]&0x7f;
disp_butf[4]=disp_butl4]&0x7f;
while(1)
{
disp_buf[i]=disp_buf[i]10x40;//E1个位首先闪烁
ZLG7290_SendBuf(&disp_butl0],i+1);
if(KEY_INT-==0)
{
KEY=ZLG7290_GetKey0;
if(KEY==up)//加l
{
disp_buf[i]=disp_butIi]+1;
if((disp_buf[i]&OxOf)= 10)
{
disp_butIi]2disp_butli]&0x40;
}
}
if(KEY==down)
{
disp_buf[i]=disp_buf[i]-l;
if((disp_buf[i]&OxOf)==OxOF)
{
disp_butIi]=0x49;
}
}
If(KEY'==left)
{
disp_buf[i]=disp__buf[i]&0XBF;//stop flash
i=i+l;
if(i>5)
{
ZLG7290_sendBuf(&disp_buf[0],8);
i=0;
}
}
if(KEY==ok)//确认
{
disp_butli]=disp_butf[i]&0XBF;//stop flash
ZLG7290_SendBuf(&disp_buf[i],1);
tdl[0]=disp_buf[1]*1 6+(disp_butl0]&0XOF);
tdl[1]=dispbuf[3]*16+disp_butl2];
tdl[2]=disp_buf[5]*16+disp_buf[4];
ISendStr(PCF8563,WRADDR+5,tdl,0x1);
ISendStr(PCF8563,WRADDR+7,&tdl[1],ox2);i=0:
break;
}
}
}
}
····································
if(KEY=setlongitude)//is longitude?
{
display_longimde(Lloc);
while(1)
{
disp_buf[i]=disp buif[i] 0x40;//秒首先闪烁
ZLG7290_ SendBuf(&disp_buf[0],i+1);
if(KEY_INT==0)
{
KEY=ZLG7290_ GetKeY0;
if(KEY==up)//加l
{
disp_buf[i]=disp_butli]+l;
if((disp_buf[i]&0x0f)==10)
{
disp bur[i]=disp_buf[i]&0x40;
}
}
if(KEY= down)
{
disp_bul[i]=disp butli]-l;
if((disp_buflil&OxOf)==OxOF)
{
disp_buf[i]=0x49;
}
}
if(KEY=left)
{
disp_but[i]=disp_buf[i]&0XBF;//stop flash
i=i+l;
if(i>6)
{
ZLG7290_SendBuf(&disp_buf[0],8);
i=0:
}
}
if(KEY=ok)//确认
{
Disp_buf[i]=disp_buf[i]&0XBF;//Stop flash
Lloc.Iongtitudesec=disp_butf[l]*10+disp_buf[0];
Lloc.1ongtitudemin=disp_butf[3]*10+disp_buf[2];
Lloc.longtitudehour=disp_buf[6]*100+disp_buf[5]*10+disp_buf[4];i=0:
break;
}
}
}
}
// 设置纬度
····································
if(KEY=etlatitude)//is set latimde?
{
display_latitude(1atitude);
while(1)
{
disp_buf[i]=disp_buf[i] 0x40;//秒首先闪烁
ZLG7290_SendBuf(&disp_butl0],i+1);
If(KEY_INT==0)
{
KEY =ZLG7290_GetKeY0;
if(KEY==up)//加l
{
disp_butf[i]=disp_buf[i]+l;
if((disp_buf[i]&0xof)=l0)
{
disp_buf[i]=disp_buf[i]&0x40;
}
}
if(KEY==down)
{
disp_buf[i]=disp_butf[i]+1;
if((disp_buf[i]&OxOf)=20x0F)
{
disp_buf[i]=0x49;
}
}
If(KEY=left)
{
disp_buf[i]=disp_buf[i]&OXBF;//stop flash
i=i+l;
if(i>5)
{
ZLG7290_SendBuf(&disp_buf[0],8);
i=O;
}
}
If(KEY==6)//确认
{
disp_buf[i]=disp_butIi]&0XBF;//stop flash
latitude[2]=disp_buf[1]*10+disp_buf[0];
latitude[1]=disp_butl3]*10+disp_but[2];
latitude[0]=disp_buf[5]*10+disp_butl4];
i=0;
break;
}
}
}
}
·时间调整子程序
····································
if(KEY= =settime) //is settime?
{
IRcvStr(PCF8563,RDADDR,rd,0x3);//读现在的时、分、秒
display_timeset(rd);
while(1)
{
disp_buf[i]=disp_buf[i]0x40;//秒首先闪烁
ZLG7290_SendBuf(&disp_butl0],i+1);if(KEY_INT= =0)
{
KEY=ZLG7290_GetKeY();
If(KEY= =up)//加1
{
disp_buf[i]=disp_butf[i]+1;
if((disp_but[i]&0x0f)= = 10)
{
disp_buf[i]=disp_buf[i]&0x40;
}
}
If(KEY= =down)
{
disp_buf[i]=disp_butIi]-1;
if((disp_buf[i]&0x0f)= =0x0F)
{
disp_bufIi]=0x49;
}
}
If(KEY==left)
{
disp_buf[i]=disp_buf[i]&0XBF;//stop flash
i=i+l:
if(i>7)
{
ZLG7290_SendBuf(&disp_buf[0],8);
i=0;
}
}
if(KEY==ok)//确认
{
disp_buf[i]=disp_buf[i]&0XBF;//stop flash
ZLG7290_SendBuf(&disp_buf[i],1);tdl[0]=disp_buf[1]*16+(disp_butl0]&0XOF);
tdl[1]=disp_butf[4]*16+disp_buf[3];
tdl[2]=disp_buf[7]*16+disp_buf[6];
ISendStr(PCF8563,WRADDR+2,td l,0x3);
i=0;
break;
}
}
}
}
}四、结论
本设计开发了以AT89C51RC为核心的硬件控制电路,硬件接口电路主要包括复位电路,I2C串行通信电路和步进电机驱动电路;同时进行了软件部分的设计,由以上软硬件构成的控制系统,实现了在地平坐标系下对太阳的二维跟踪。
本课题研究方向的一些展望:
1.采用步进电机驱动聚光器转动虽可有效控制累积误差,但也存在电能消耗多和负载增大时(如大风天气)容易出现丢步等问题。采用直流电机作为动力机械,通过开环闭环相结合的控制方式消除系统累积误差的跟踪方式更具前景,但’反应速度快,精度高的光电传感器造价高,跟踪系统成本的控制依赖于低成本,高性能的光电传感器的研制和开发。
2.考虑到太阳能跟踪控制系统的实际应用环境(多为沙漠地区)的恶劣,提高控制电路的抗干扰性势在必行。随着电子技术的发展,提高元器件及芯片性能和系统组成的模块化程度,是控制领域发展的大趋势。
五、 文章目录
目 录
摘要 I
Abstract II
1 绪论 1
1.1课题背景及意义 1
1.1.1太阳能热发电技术是最有前途的可再生能源发电方式 1
1.1.2几种主要太阳能热发电方式的前景 2
1.2我国的太阳能资源 3
1.3国内外现状 4
1.4本论文设计的主要内容 5
2 系统硬件的设计 6
2.1跟踪控制方案的选择 6
2.1.1跟踪系统坐标系的选择 6
2.1.2跟踪方式及跟踪系统的选择 6
2.2系统总体设计及相关硬件介绍 7
2.2.1复位电路的硬件设计 9
2.2.2 I2C通信模块 10
2.2.3步进电机模块 14
2.3本章小结 15
3 软件设计 17
3.1 I2C串行通信简介及其软件设计 19
3.1.1 I2C总线设计 19
3.2.2 I2C总线连接器件的设计 21
3.2步进电机模块的软件设计 27
3.3本章小结 27
4 结 论 30
参考文献 31
致谢 32
附录 33
附录1:原理图 33
附录2:程序 34
相关文章:
基于单片机的太阳跟踪系统的设计
欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。 技术交流认准下方 CSDN 官方提供的联系方式 文章目录 概要 一、设计的主要内容二、硬件电路设计2.1跟踪控制方案的选择2.1.1跟踪系统坐标系的选择2.2系统总体设计及相关硬件介绍…...
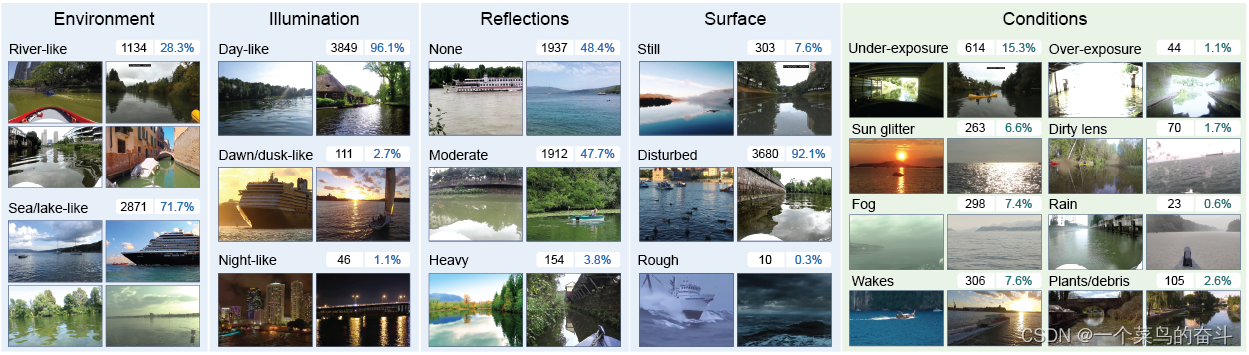
V3Det大规模词汇视觉检测数据集与LaRS海上全景障碍物检测数据集
V3Det与LaRS是ICCV2023上发表的数据集工作,规模都比较大,后续有可能会用到,因此记录下来。 V3Det: Vast Vocabulary Visual Detection Dataset Paper: https://arxiv.org/abs/2304.03752 URL: https://v3det.openxlab.org.cn/ 在现实世界中…...

ubuntu(18.04) 安装 blast
1、下载 https://ftp.ncbi.nlm.nih.gov/blast/executables/blast/LATEST/2、解压,配置环境变量 tar zvxf ncbi-blast-2.14.1-x64-linux.tar.gz解压后改名为 blast 配置环境变量,可以不配置 使用的时候直接绝对路径使用 vim ~/.bashrc 将下面添加道最…...
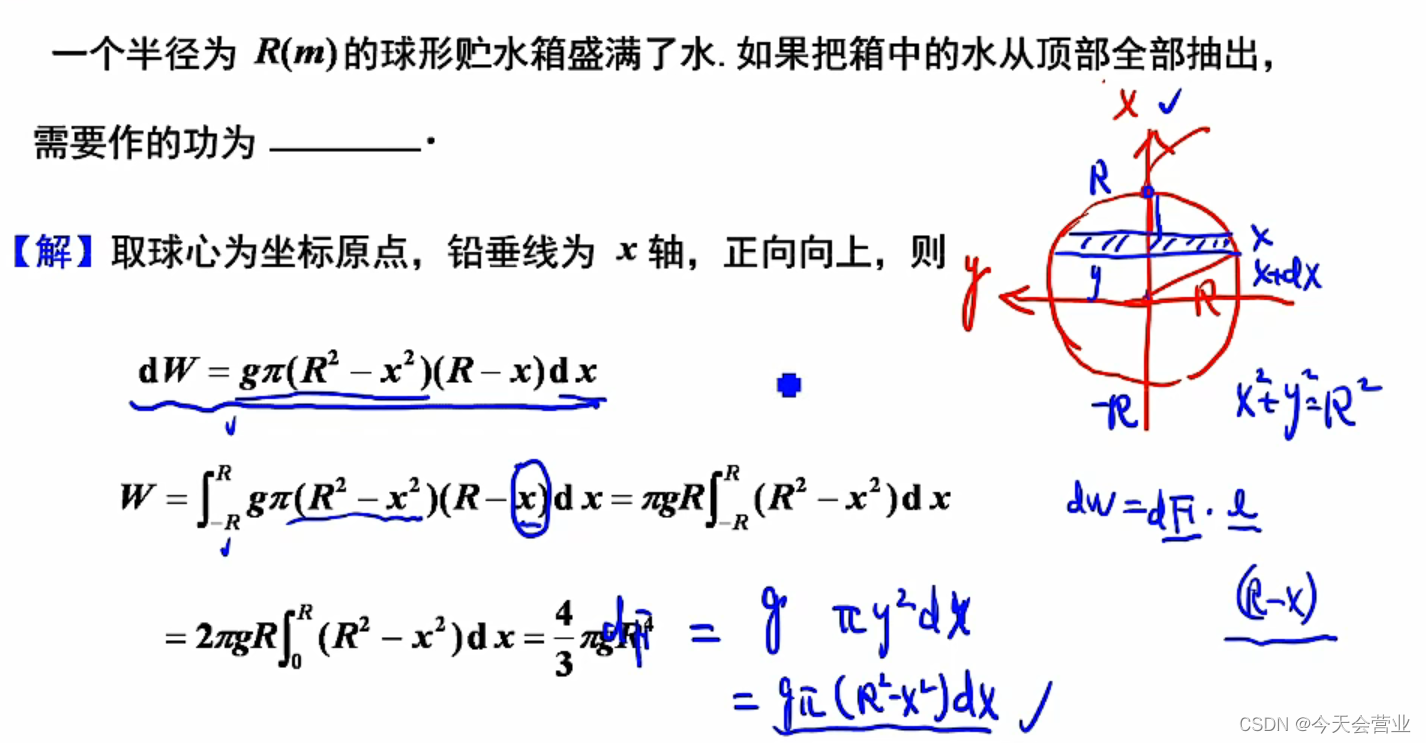
3.2每日一题(定积分求抽水做工问题)
1、画图,把题目的容器画出来:球形容器,半径为R 2、根据容器的形状进行分析: 抽水的实质是不同深度的水抽出去走的位移是不一样的>抽水的过程 : (1)先考虑深度为 x到xdx 的薄层水抽出去做多少…...

c语言基础:L1-063 吃鱼还是吃肉
国家给出了 8 岁男宝宝的标准身高为 130 厘米、标准体重为 27 公斤;8 岁女宝宝的标准身高为 129 厘米、标准体重为 25 公斤。 现在你要根据小宝宝的身高体重,给出补充营养的建议。 输入格式: 输入在第一行给出一个不超过 10 的正整数 N&am…...

<if> 标签中使用了不正确的语法。在 XML 中,<if> 标签不需要使用 <![CDATA[ ... ]]> 将条件语句包装起来。 否则会报错
标签中使用了不正确的语法。在 XML 中, 标签不需要使用 <![CDATA[ ... ]]> 将条件语句包装起来。 否则会报错...
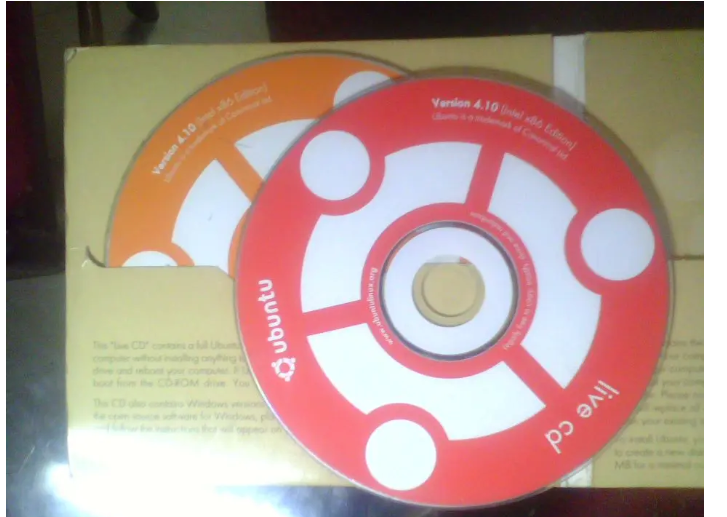
Ubuntu 诞生 19 年
导读2004 年 10 月 20 日,Ubuntu 4.10 正式发布,代号‘Warty Warthog’。 作为 Ubuntu 第一个版本,4.10 问世后立刻受到广大 Linux 用户欢迎。它搭载了当时最新的 GNOME 2.8 桌面环境,以及一系列实用软件,比如 Mozilla…...
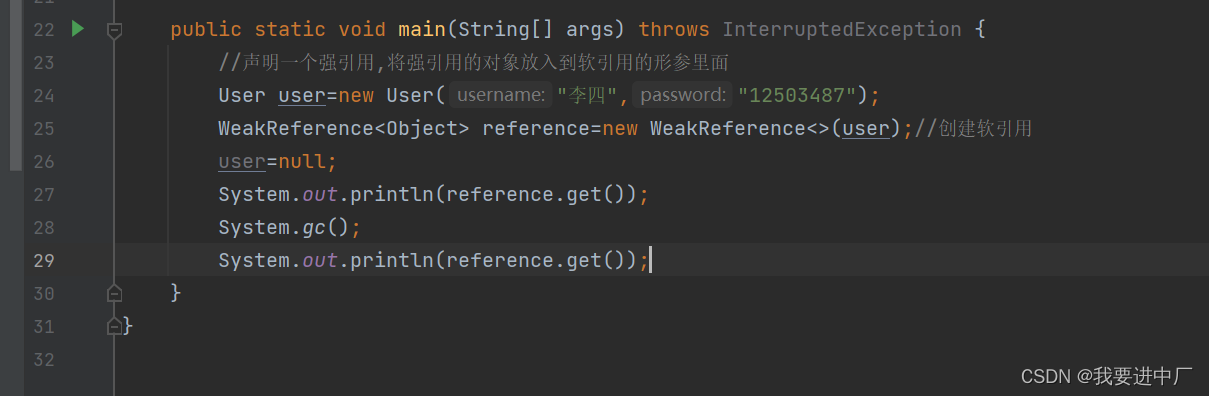
JVM进阶(3)
一)什么是垃圾? 垃圾指的是在应用程序中没有任何指针指向的对象,这个对象就是需要被回收的垃圾,如果不及时的针对内存中的垃圾进行清理,那么这些垃圾对象所占用的内存空间可能一直保留到应用程序结束,被保留的空间无法…...
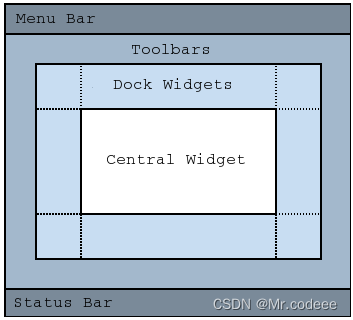
Qt QWidget、QDialog、QMainWindow的区别
QWidget QWidget是Qt框架中最基础的窗口类,可以理解为用户界面的最基本单元。QWidget类提供了一个空白窗口,可以通过继承该类来创建自定义的窗口类。QWidget类提供了基本的窗口属性和方法,如大小、位置、标题、图标等。 QDialog QDialog是…...
)
软考 系统架构设计师系列知识点之设计模式(10)
接前一篇文章:软考 系统架构设计师系列知识点之设计模式(9) 所属章节: 老版(第一版)教材 第7章. 设计模式 第2节. 设计模式实例 相关试题 9. 某软件公司欲设计一款图像处理软件,帮助用户对拍…...

【python爬虫】设计自己的爬虫 1. request封装
通过requests.session().request 封装request方法 考虑到请求HTTP/2.0 同时封装httpx 来处理HTTP/2.0的请求 封装requests # 遇到请求失败的情况时 重新请求,请求5次等待2s retry(stop_max_attempt_number5, retry_on_resultlambda re_data: re_data is None, wai…...

8.0 新特性 - innodb_ddl_threads
前言 MySQL 8.0.27 引入了一个新变量来控制 InnoDB 可用于创建(排序和构建)二级索引的最大并行线程数:innodb_ddl_threads 通过调整该参数,可以提升二级索引的创建速度。 参数介绍 1. innodb_ddl_threads 创建二级索引时&…...
pgAdmin 4 v7.8 发布,PostgreSQL 开源图形化管理工具
导读pgAdmin 是 PostgreSQL 领先的开源图形化管理工具。pgAdmin 4 旨在满足新手和有经验的 Postgres 用户的需求,提供强大的图形界面,简化了数据库对象的创建、维护和使用。 pgAdmin 开发团队日前发布了 pgAdmin 4 v7.8 版本,这个版本包括 21…...
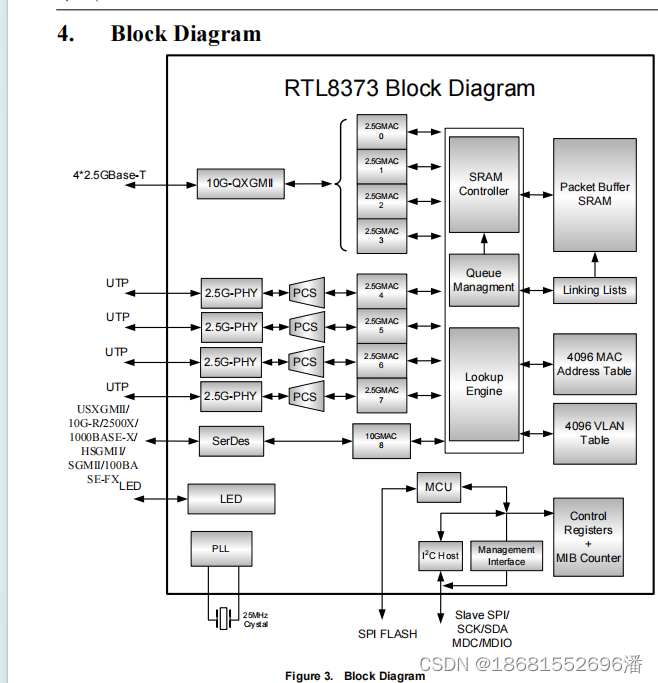
Realrek 2.5G交换机 8+1万兆光RTL8373-VB-CG方案简介
新一代2.5G交换机方案RTL8373-VB-CG可以提供4中不同形态 a. 52.5G 电口110G光》RTL8373 b. 52.5G 电口110G电》RTL83738261 c. 82.5G 电口110G光》RTL83738224 d.82.5G 电口110G电口》RTL837382248261 1.概述 Realtek RTL8373-CG是一款低功耗、高性能、高度集成的八端口2.5G和一…...

Linux命令随笔
文章目录 grep命令 grep命令 例如,在Linux系统中,要在当前目录下的所有文件中搜索包含字符串"hello"的行,并显示文件名,可以使用以下命令: grep -r "hello" .其中,"."表示…...

最新版scene-builder安装
JavaFX Scene Builder是一个可视化的布局工具,用于设计JavaFX用户界面。它允许开发人员使用拖放和可视化的方式创建和编辑JavaFX界面,而无需直接编写代码。 JavaFX Scene Builder提供了一个直观的界面,让开发人员可以轻松地创建和修改JavaFX…...

直击电商商城内核!一站式解决方案
作为一家深耕电商运营多年的软件开发公司,我们拥有先进的轻量级电商中台系统,且100%开源,包含B2C、B2B2C、S2B2C、O2O和社区团购等多种商业模式,无论在技术、业务架构、功能、设计还是售后支持上,我们都秉承着追求极致…...
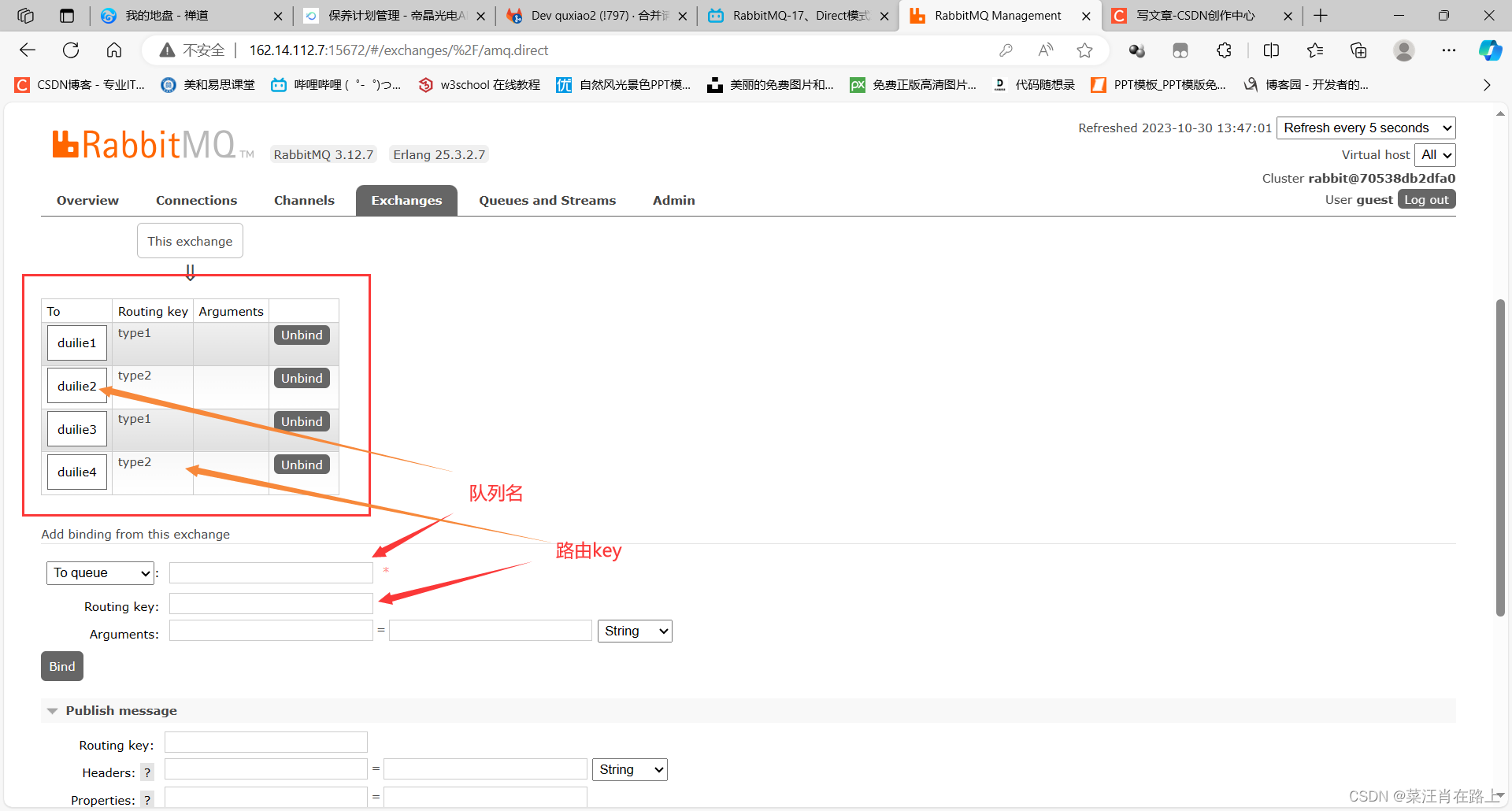
rabbitmq安装、基本使用
docker run -it --rm --name rabbitmq -p 5672:5672 -p 15672:15672 rabbitmq:3.12-management docker会自己下载,然后运行 进入docker: docker exec -it rabbitmq bash 进入容器,重启rabbitmq:rabbitmq-server restart 感觉所有的…...
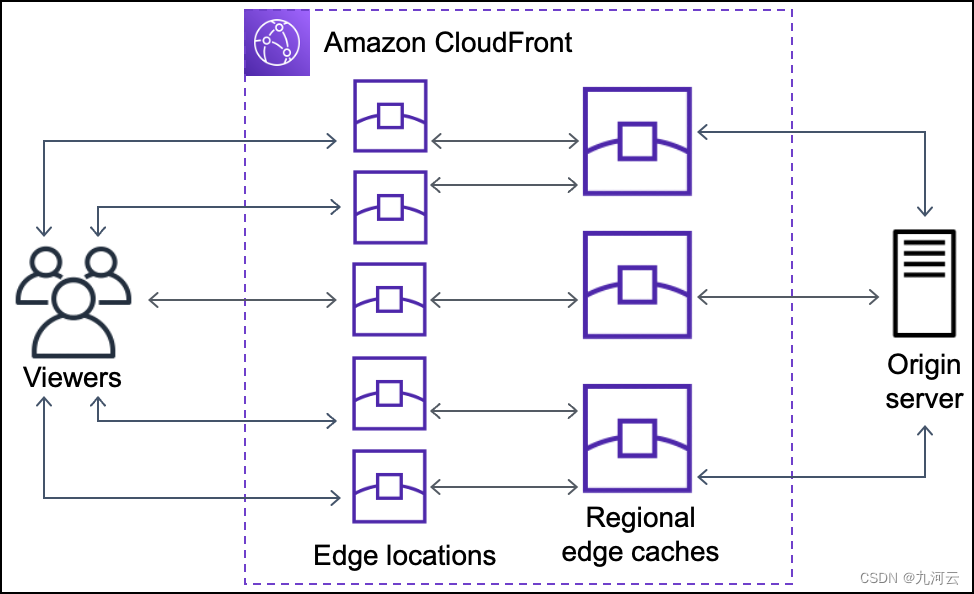
Amaon CloudFront助力出海业务访问优化
企业的展示网站需要面向多个国家的客户时,由于地理位置的原因。往往会出现一个痛点,网络延迟太高,以至于图片、视频播放时会非常卡顿。客户的访问体验非常差,直接影响到企业收益。此篇文章九河云综合分析Amaon CloudFront…...

python实现ModBusRTU服务端
python实现基于串口通信的ModBusRTU服务端是一件简单的事情,只要通过pymodbus模块和Serial模块就可以实现。...

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…...
从WWDC看苹果产品发展的规律
WWDC 是苹果公司一年一度面向全球开发者的盛会,其主题演讲展现了苹果在产品设计、技术路线、用户体验和生态系统构建上的核心理念与演进脉络。我们借助 ChatGPT Deep Research 工具,对过去十年 WWDC 主题演讲内容进行了系统化分析,形成了这份…...

AI Agent与Agentic AI:原理、应用、挑战与未来展望
文章目录 一、引言二、AI Agent与Agentic AI的兴起2.1 技术契机与生态成熟2.2 Agent的定义与特征2.3 Agent的发展历程 三、AI Agent的核心技术栈解密3.1 感知模块代码示例:使用Python和OpenCV进行图像识别 3.2 认知与决策模块代码示例:使用OpenAI GPT-3进…...
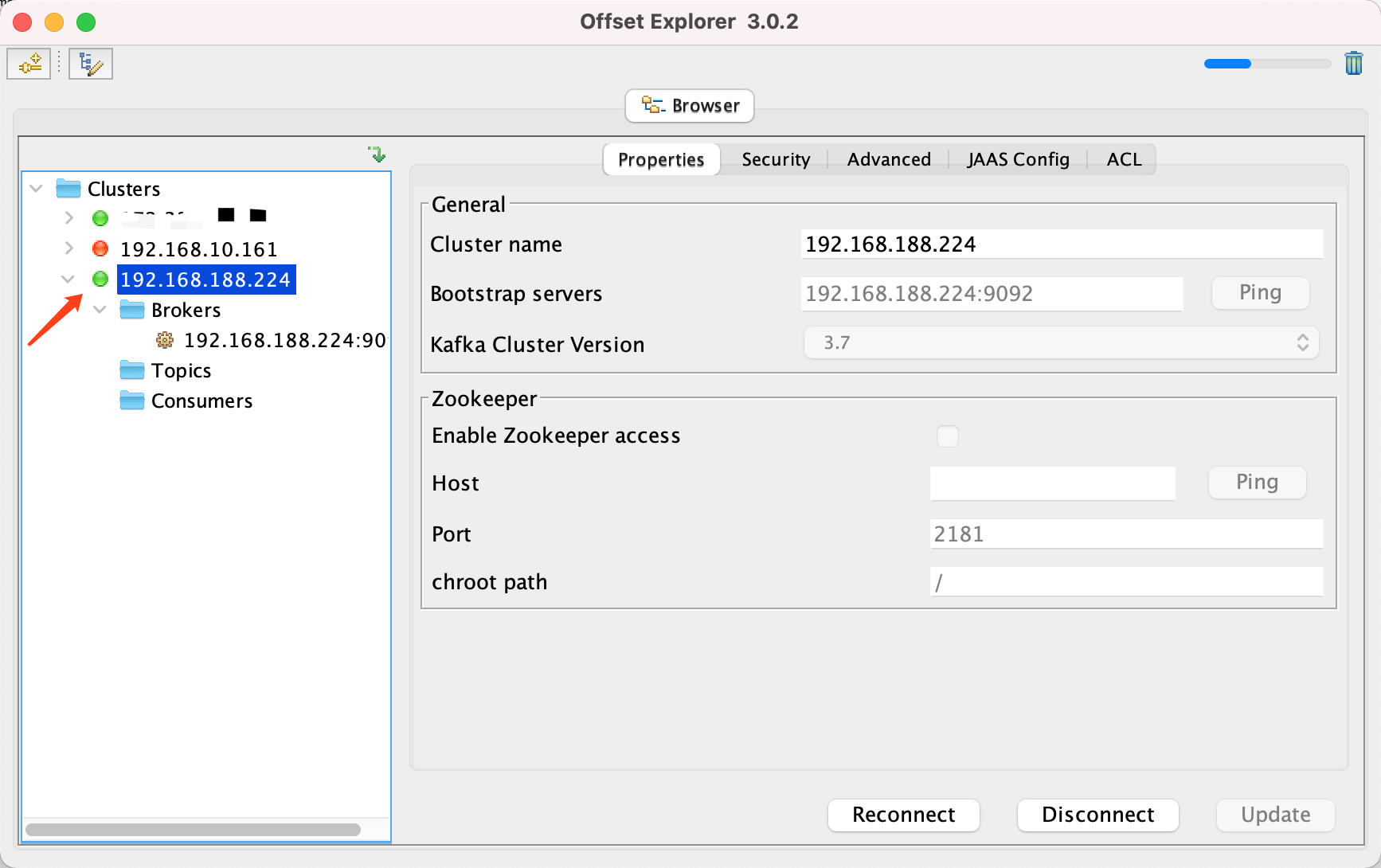
Docker 运行 Kafka 带 SASL 认证教程
Docker 运行 Kafka 带 SASL 认证教程 Docker 运行 Kafka 带 SASL 认证教程一、说明二、环境准备三、编写 Docker Compose 和 jaas文件docker-compose.yml代码说明:server_jaas.conf 四、启动服务五、验证服务六、连接kafka服务七、总结 Docker 运行 Kafka 带 SASL 认…...

智能在线客服平台:数字化时代企业连接用户的 AI 中枢
随着互联网技术的飞速发展,消费者期望能够随时随地与企业进行交流。在线客服平台作为连接企业与客户的重要桥梁,不仅优化了客户体验,还提升了企业的服务效率和市场竞争力。本文将探讨在线客服平台的重要性、技术进展、实际应用,并…...

基于Docker Compose部署Java微服务项目
一. 创建根项目 根项目(父项目)主要用于依赖管理 一些需要注意的点: 打包方式需要为 pom<modules>里需要注册子模块不要引入maven的打包插件,否则打包时会出问题 <?xml version"1.0" encoding"UTF-8…...
R 语言科研绘图第 55 期 --- 网络图-聚类
在发表科研论文的过程中,科研绘图是必不可少的,一张好看的图形会是文章很大的加分项。 为了便于使用,本系列文章介绍的所有绘图都已收录到了 sciRplot 项目中,获取方式: R 语言科研绘图模板 --- sciRplothttps://mp.…...

人工智能--安全大模型训练计划:基于Fine-tuning + LLM Agent
安全大模型训练计划:基于Fine-tuning LLM Agent 1. 构建高质量安全数据集 目标:为安全大模型创建高质量、去偏、符合伦理的训练数据集,涵盖安全相关任务(如有害内容检测、隐私保护、道德推理等)。 1.1 数据收集 描…...

十九、【用户管理与权限 - 篇一】后端基础:用户列表与角色模型的初步构建
【用户管理与权限 - 篇一】后端基础:用户列表与角色模型的初步构建 前言准备工作第一部分:回顾 Django 内置的 `User` 模型第二部分:设计并创建 `Role` 和 `UserProfile` 模型第三部分:创建 Serializers第四部分:创建 ViewSets第五部分:注册 API 路由第六部分:后端初步测…...
【无标题】湖北理元理律师事务所:债务优化中的生活保障与法律平衡之道
文/法律实务观察组 在债务重组领域,专业机构的核心价值不仅在于减轻债务数字,更在于帮助债务人在履行义务的同时维持基本生活尊严。湖北理元理律师事务所的服务实践表明,合法债务优化需同步实现三重平衡: 法律刚性(债…...