目标跟踪(DeepSORT)
本文首先将介绍在目标跟踪任务中常用的匈牙利算法(Hungarian Algorithm)和卡尔曼滤波(Kalman Filter),然后介绍经典算法DeepSORT的工作流程以及对相关源码进行解析。
目前主流的目标跟踪算法都是基于Tracking-by-Detecton策略,即基于目标检测的结果来进行目标跟踪。DeepSORT运用的就是这个策略,上面的视频是DeepSORT对人群进行跟踪的结果,每个bbox左上角的数字是用来标识某个人的唯一ID号。
这里就有个问题,视频中不同时刻的同一个人,位置发生了变化,那么是如何关联上的呢?答案就是匈牙利算法和卡尔曼滤波。
- 匈牙利算法可以告诉我们当前帧的某个目标,是否与前一帧的某个目标相同。
- 卡尔曼滤波可以基于目标前一时刻的位置,来预测当前时刻的位置,并且可以比传感器(在目标跟踪中即目标检测器,比如Yolo等)更准确的估计目标的位置。
匈牙利算法(Hungarian Algorithm)
首先,先介绍一下什么是分配问题(Assignment Problem):假设有N个人和N个任务,每个任务可以任意分配给不同的人,已知每个人完成每个任务要花费的代价不尽相同,那么如何分配可以使得总的代价最小。
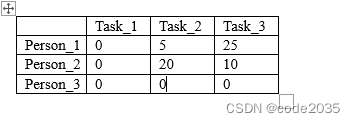
举个例子,假设现在有3个任务,要分别分配给3个人,每个人完成各个任务所需代价矩阵(cost matrix)。

怎样才能找到一个最优分配,使得完成所有任务花费的代价最小呢?
匈牙利算法(又叫KM算法)就是用来解决分配问题的一种方法,它基于定理:
如果代价矩阵的某一行或某一列同时加上或减去某个数,则这个新的代价矩阵的最优分配仍然是原代价矩阵的最优分配。
算法步骤(假设矩阵为NxN方阵):
- 对于矩阵的每一行,减去其中最小的元素
- 对于矩阵的每一列,减去其中最小的元素
- 用最少的水平线或垂直线覆盖矩阵中所有的0
- 如果线的数量等于N,则找到了最优分配,算法结束,否则进入步骤5
- 找到没有被任何线覆盖的最小元素,每个没被线覆盖的行减去这个元素,每个被线覆盖的列加上这个元素,返回步骤3
继续拿上面的例子做演示:
step1 每一行最小的元素分别为15、20、20,减去得到:

step2 每一列最小的元素分别为0、20、5,减去得到:
step3 用最少的水平线或垂直线覆盖所有的0,得到:

step4 线的数量为2,小于3,进入下一步;
step5 现在没被覆盖的最小元素是5,没被覆盖的行(第一和第二行)减去5,得到:

被覆盖的列(第一列)加上5,得到:

跳转到step3,用最少的水平线或垂直线覆盖所有的0,得到:

step4:线的数量为3,满足条件,算法结束。显然,将任务2分配给第1个人、任务1分配给第2个人、任务3分配给第3个人时,总的代价最小(0+0+0=0):

所以原矩阵的最小总代价为(40+20+25=85):
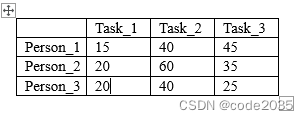
sklearn里的linear_assignment()函数以及scipy里的linear_sum_assignment()函数都实现了匈牙利算法,两者的返回值的形式不同:
import numpy as np
from sklearn.utils.linear_assignment_ import linear_assignment
from scipy.optimize import linear_sum_assignmentcost_matrix = np.array([[15,40,45],[20,60,35],[20,40,25]
])matches = linear_assignment(cost_matrix)
print('sklearn API result:\n', matches)
matches = linear_sum_assignment(cost_matrix)
print('scipy API result:\n', matches)"""Outputs
sklearn API result:[[0 1][1 0][2 2]]
scipy API result:(array([0, 1, 2], dtype=int64), array([1, 0, 2], dtype=int64))
"""在DeepSORT中,匈牙利算法用来将前一帧中的跟踪框tracks与当前帧中的检测框detections进行关联,通过外观信息(appearance information)和马氏距离(Mahalanobis distance),或者IOU来计算代价矩阵。
源码解读:
# linear_assignment.py
def min_cost_matching(distance_metric, max_distance, tracks, detections, track_indices=None, detection_indices=None):...# 计算代价矩阵cost_matrix = distance_metric(tracks, detections, track_indices, detection_indices)cost_matrix[cost_matrix > max_distance] = max_distance + 1e-5# 执行匈牙利算法,得到匹配成功的索引对,行索引为tracks的索引,列索引为detections的索引row_indices, col_indices = linear_assignment(cost_matrix)matches, unmatched_tracks, unmatched_detections = [], [], []# 找出未匹配的detectionsfor col, detection_idx in enumerate(detection_indices):if col not in col_indices:unmatched_detections.append(detection_idx)# 找出未匹配的tracksfor row, track_idx in enumerate(track_indices):if row not in row_indices:unmatched_tracks.append(track_idx)# 遍历匹配的(track, detection)索引对for row, col in zip(row_indices, col_indices):track_idx = track_indices[row]detection_idx = detection_indices[col]# 如果相应的cost大于阈值max_distance,也视为未匹配成功if cost_matrix[row, col] > max_distance:unmatched_tracks.append(track_idx)unmatched_detections.append(detection_idx)else:matches.append((track_idx, detection_idx))return matches, unmatched_tracks, unmatched_detections卡尔曼滤波(Kalman Filter)
卡尔曼滤波被广泛应用于无人机、自动驾驶、卫星导航等领域,简单来说,其作用就是基于传感器的测量值来更新预测值,以达到更精确的估计。
假设我们要跟踪小车的位置变化,如下图所示,蓝色的分布是卡尔曼滤波预测值,棕色的分布是传感器的测量值,灰色的分布就是预测值基于测量值更新后的最优估计。

在目标跟踪中,需要估计track的以下两个状态:
- 均值(Mean):表示目标的位置信息,由bbox的中心坐标 (cx, cy),宽高比r,高h,以及各自的速度变化值组成,由8维向量表示为 x = [cx, cy, r, h, vx, vy, vr, vh],各个速度值初始化为0。
- 协方差(Covariance ):表示目标位置信息的不确定性,由8x8的对角矩阵表示,矩阵中数字越大则表明不确定性越大,可以以任意值初始化。
卡尔曼滤波分为两个阶段:(1) 预测track在下一时刻的位置,(2) 基于detection来更新预测的位置。
下面将介绍这两个阶段用到的计算公式。(这里不涉及公式的原理推导,因为我也不清楚原理(ಥ_ಥ) ,只是说明一下各个公式的作用)
预测
基于track在 t-1时刻的状态来预测其在 t时刻的状态。

在公式1中,x为track在t-1时刻的均值,F称为状态转移矩阵,该公式预测t时刻的x':

矩阵F中的dt是当前帧和前一帧之间的差,将等号右边的矩阵乘法展开,可以得到cx'=cx+dt*vx,cy'=cy+dt*vy...,所以这里的卡尔曼滤波是一个匀速模型(Constant Velocity Model)。
在公式2中,P为track在t-1时刻的协方差,Q为系统的噪声矩阵,代表整个系统的可靠程度,一般初始化为很小的值,该公式预测t时刻的P'。
源码解读:
# kalman_filter.py
def predict(self, mean, covariance):"""Run Kalman filter prediction step.Parameters----------mean: ndarray, the 8 dimensional mean vector of the object state at the previous time step.covariance: ndarray, the 8x8 dimensional covariance matrix of the object state at the previous time step.Returns-------(ndarray, ndarray), the mean vector and covariance matrix of the predicted state. Unobserved velocities are initialized to 0 mean."""std_pos = [self._std_weight_position * mean[3],self._std_weight_position * mean[3],1e-2,self._std_weight_position * mean[3]]std_vel = [self._std_weight_velocity * mean[3],self._std_weight_velocity * mean[3],1e-5,self._std_weight_velocity * mean[3]]motion_cov = np.diag(np.square(np.r_[std_pos, std_vel])) # 初始化噪声矩阵Qmean = np.dot(self._motion_mat, mean) # x' = Fxcovariance = np.linalg.multi_dot((self._motion_mat, covariance, self._motion_mat.T)) + motion_cov # P' = FPF(T) + Qreturn mean, covariance更新
基于 t时刻检测到的detection,校正与其关联的track的状态,得到一个更精确的结果。
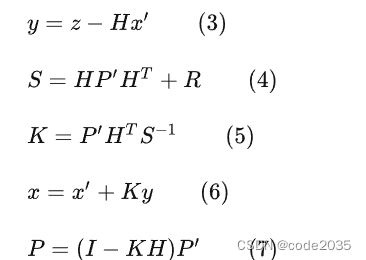
在公式3中,z为detection的均值向量,不包含速度变化值,即z=[cx, cy, r, h],H称为测量矩阵,它将track的均值向量x'映射到检测空间,该公式计算detection和track的均值误差;
在公式4中,R为检测器的噪声矩阵,它是一个4x4的对角矩阵,对角线上的值分别为中心点两个坐标以及宽高的噪声,以任意值初始化,一般设置宽高的噪声大于中心点的噪声,该公式先将协方差矩阵P'映射到检测空间,然后再加上噪声矩阵R;
公式5计算卡尔曼增益K,卡尔曼增益用于估计误差的重要程度;
公式6和公式7得到更新后的均值向量x和协方差矩阵P。
源码解读:
# kalman_filter.py
def project(self, mean, covariance):"""Project state distribution to measurement space.Parameters----------mean: ndarray, the state's mean vector (8 dimensional array).covariance: ndarray, the state's covariance matrix (8x8 dimensional).Returns-------(ndarray, ndarray), the projected mean and covariance matrix of the given state estimate."""std = [self._std_weight_position * mean[3],self._std_weight_position * mean[3],1e-1,self._std_weight_position * mean[3]]innovation_cov = np.diag(np.square(std)) # 初始化噪声矩阵Rmean = np.dot(self._update_mat, mean) # 将均值向量映射到检测空间,即Hx'covariance = np.linalg.multi_dot((self._update_mat, covariance, self._update_mat.T)) # 将协方差矩阵映射到检测空间,即HP'H^Treturn mean, covariance + innovation_covdef update(self, mean, covariance, measurement):"""Run Kalman filter correction step.Parameters----------mean: ndarra, the predicted state's mean vector (8 dimensional).covariance: ndarray, the state's covariance matrix (8x8 dimensional).measurement: ndarray, the 4 dimensional measurement vector (x, y, a, h), where (x, y) is the center position, a the aspect ratio, and h the height of the bounding box.Returns-------(ndarray, ndarray), the measurement-corrected state distribution."""# 将mean和covariance映射到检测空间,得到Hx'和Sprojected_mean, projected_cov = self.project(mean, covariance)# 矩阵分解(这一步没看懂)chol_factor, lower = scipy.linalg.cho_factor(projected_cov, lower=True, check_finite=False)# 计算卡尔曼增益K(这一步没看明白是如何对应上公式5的,求线代大佬指教)kalman_gain = scipy.linalg.cho_solve((chol_factor, lower), np.dot(covariance, self._update_mat.T).T,check_finite=False).T# z - Hx'innovation = measurement - projected_mean# x = x' + Kynew_mean = mean + np.dot(innovation, kalman_gain.T)# P = (I - KH)P'new_covariance = covariance - np.linalg.multi_dot((kalman_gain, projected_cov, kalman_gain.T))return new_mean, new_covarianceDeepSort工作流程
DeepSORT对每一帧的处理流程如下:
检测器得到bbox → 生成detections → 卡尔曼滤波预测→ 使用匈牙利算法将预测后的tracks和当前帧中的detecions进行匹配(级联匹配和IOU匹配) → 卡尔曼滤波更新
Frame 0:检测器检测到了3个detections,当前没有任何tracks,将这3个detections初始化为tracks
Frame 1:检测器又检测到了3个detections,对于Frame 0中的tracks,先进行预测得到新的tracks,然后使用匈牙利算法将新的tracks与detections进行匹配,得到(track, detection)匹配对,最后用每对中的detection更新对应的track
检测
使用Yolo作为检测器,检测当前帧中的bbox:
# demo_yolo3_deepsort.py
def detect(self):while self.vdo.grab():...bbox_xcycwh, cls_conf, cls_ids = self.yolo3(im) # 检测到的bbox[cx,cy,w,h],置信度,类别idif bbox_xcycwh is not None:# 筛选出人的类别mask = cls_ids == 0bbox_xcycwh = bbox_xcycwh[mask]bbox_xcycwh[:, 3:] *= 1.2cls_conf = cls_conf[mask]...生成detections
将检测到的bbox转换成detections:
# deep_sort.py
def update(self, bbox_xywh, confidences, ori_img):self.height, self.width = ori_img.shape[:2]# 提取每个bbox的featurefeatures = self._get_features(bbox_xywh, ori_img)# [cx,cy,w,h] -> [x1,y1,w,h]bbox_tlwh = self._xywh_to_tlwh(bbox_xywh)# 过滤掉置信度小于self.min_confidence的bbox,生成detectionsdetections = [Detection(bbox_tlwh[i], conf, features[i]) for i,conf in enumerate(confidences) if conf > self.min_confidence]# NMS (这里self.nms_max_overlap的值为1,即保留了所有的detections)boxes = np.array([d.tlwh for d in detections])scores = np.array([d.confidence for d in detections])indices = non_max_suppression(boxes, self.nms_max_overlap, scores)detections = [detections[i] for i in indices]...卡尔曼滤波预测阶段
使用卡尔曼滤波预测前一帧中的tracks在当前帧的状态:
# track.py
def predict(self, kf):"""Propagate the state distribution to the current time step using a Kalman filter prediction step.Parameters----------kf: The Kalman filter."""self.mean, self.covariance = kf.predict(self.mean, self.covariance) # 预测self.age += 1 # 该track自出现以来的总帧数加1self.time_since_update += 1 # 该track自最近一次更新以来的总帧数加1匹配
首先对基于外观信息的马氏距离计算tracks和detections的代价矩阵,然后相继进行级联匹配和IOU匹配,最后得到当前帧的所有匹配对、未匹配的tracks以及未匹配的detections:
# tracker.py
def _match(self, detections):def gated_metric(racks, dets, track_indices, detection_indices):"""基于外观信息和马氏距离,计算卡尔曼滤波预测的tracks和当前时刻检测到的detections的代价矩阵"""features = np.array([dets[i].feature for i in detection_indices])targets = np.array([tracks[i].track_id for i in track_indices]# 基于外观信息,计算tracks和detections的余弦距离代价矩阵cost_matrix = self.metric.distance(features, targets)# 基于马氏距离,过滤掉代价矩阵中一些不合适的项 (将其设置为一个较大的值)cost_matrix = linear_assignment.gate_cost_matrix(self.kf, cost_matrix, tracks, dets, track_indices, detection_indices)return cost_matrix# 区分开confirmed tracks和unconfirmed tracksconfirmed_tracks = [i for i, t in enumerate(self.tracks) if t.is_confirmed()]unconfirmed_tracks = [i for i, t in enumerate(self.tracks) if not t.is_confirmed()]# 对confirmd tracks进行级联匹配matches_a, unmatched_tracks_a, unmatched_detections = \linear_assignment.matching_cascade(gated_metric, self.metric.matching_threshold, self.max_age,self.tracks, detections, confirmed_tracks)# 对级联匹配中未匹配的tracks和unconfirmed tracks中time_since_update为1的tracks进行IOU匹配iou_track_candidates = unconfirmed_tracks + [k for k in unmatched_tracks_a ifself.tracks[k].time_since_update == 1]unmatched_tracks_a = [k for k in unmatched_tracks_a ifself.tracks[k].time_since_update != 1]matches_b, unmatched_tracks_b, unmatched_detections = \linear_assignment.min_cost_matching(iou_matching.iou_cost, self.max_iou_distance, self.tracks,detections, iou_track_candidates, unmatched_detections)# 整合所有的匹配对和未匹配的tracksmatches = matches_a + matches_bunmatched_tracks = list(set(unmatched_tracks_a + unmatched_tracks_b))return matches, unmatched_tracks, unmatched_detections# 级联匹配源码 linear_assignment.py
def matching_cascade(distance_metric, max_distance, cascade_depth, tracks, detections, track_indices=None, detection_indices=None):...unmatched_detections = detection_indicematches = []# 由小到大依次对每个level的tracks做匹配for level in range(cascade_depth):# 如果没有detections,退出循环if len(unmatched_detections) == 0: break# 当前level的所有tracks索引track_indices_l = [k for k in track_indices if tracks[k].time_since_update == 1 + level]# 如果当前level没有track,继续if len(track_indices_l) == 0: continue# 匈牙利匹配matches_l, _, unmatched_detections = min_cost_matching(distance_metric, max_distance, tracks, detections, track_indices_l, unmatched_detections)matches += matches_lunmatched_tracks = list(set(track_indices) - set(k for k, _ in matches))return matches, unmatched_tracks, unmatched_detections卡尔曼滤波更新阶段
对于每个匹配成功的track,用其对应的detection进行更新,并处理未匹配tracks和detections:
# tracker.py
def update(self, detections):"""Perform measurement update and track management.Parameters----------detections: List[deep_sort.detection.Detection]A list of detections at the current time step."""# 得到匹配对、未匹配的tracks、未匹配的dectectionsmatches, unmatched_tracks, unmatched_detections = self._match(detections)# 对于每个匹配成功的track,用其对应的detection进行更新for track_idx, detection_idx in matches:self.tracks[track_idx].update(self.kf, detections[detection_idx])# 对于未匹配的成功的track,将其标记为丢失for track_idx in unmatched_tracks:self.tracks[track_idx].mark_missed()# 对于未匹配成功的detection,初始化为新的trackfor detection_idx in unmatched_detections:self._initiate_track(detections[detection_idx])...相关文章:
目标跟踪(DeepSORT)
本文首先将介绍在目标跟踪任务中常用的匈牙利算法(Hungarian Algorithm)和卡尔曼滤波(Kalman Filter),然后介绍经典算法DeepSORT的工作流程以及对相关源码进行解析。 目前主流的目标跟踪算法都是基于Tracking-by-Detec…...
2 任务2: 使用趋动云GPU进行猫狗识别实践
使用趋动云GPU进行猫狗识别实践 1 创建项目2 初始化开发环境3 调试代码4 提交离线任务5 结果集存储与下载 使用趋动云提供的免费GPU,进行猫狗识别实践。 虽然例程里面提供的是基于tensorflow的,但是你也可以使用pytorch的代码 使用这个平台的一个优点就是…...

技术分享 | app自动化测试(Android)--显式等待机制
WebDriverWait类解析 WebDriverWait 用法代码 Python 版本 WebDriverWait( driver,timeout,poll_frequency0.5,ignored_exceptionsNone) 参数解析: driver:WebDriver 实例对象 timeout: 最长等待时间,单位秒 poll_frequency: 检测的间…...
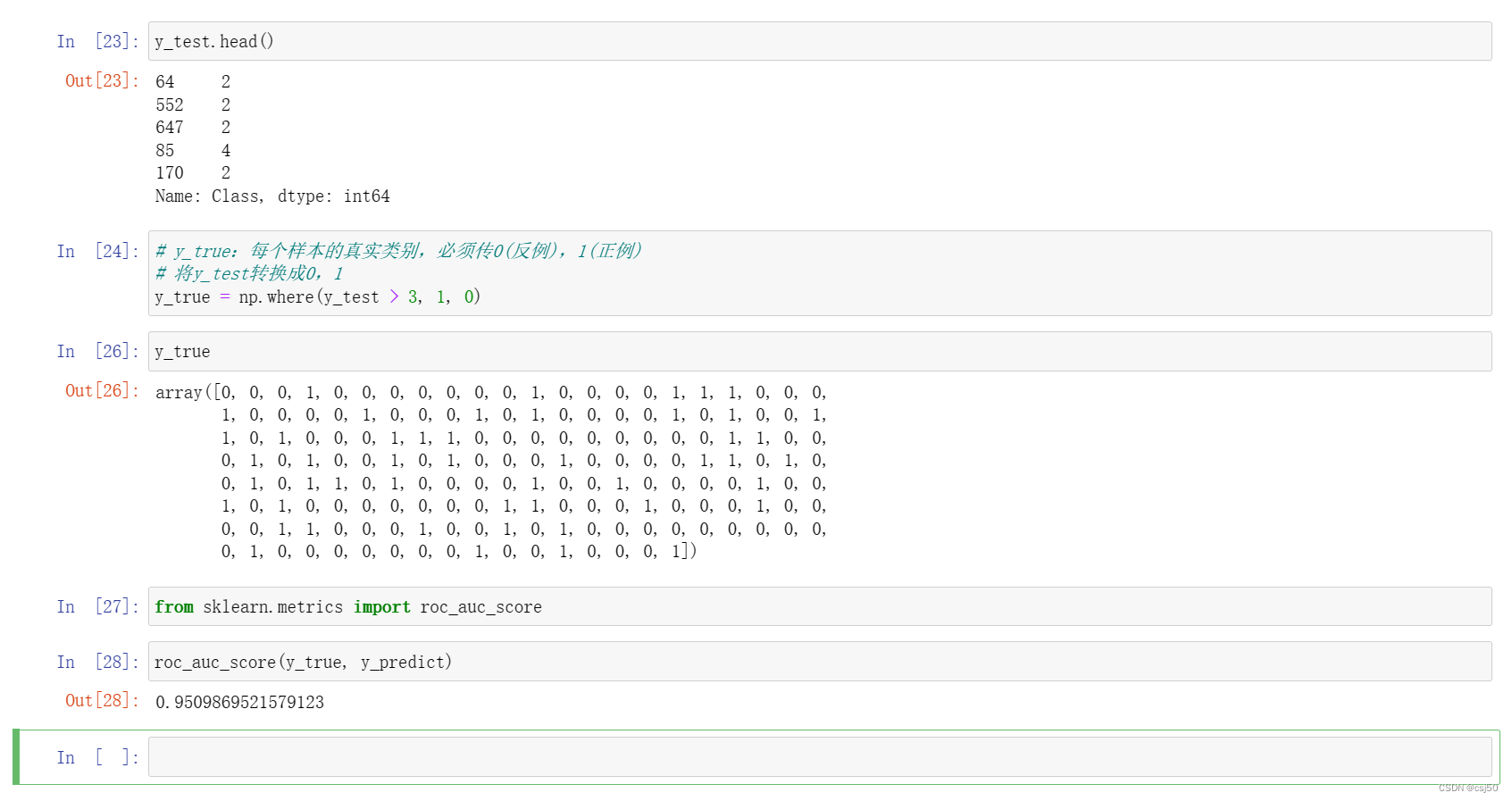
机器学习基础之《回归与聚类算法(5)—分类的评估方法》
问题:上一篇的案例,真的患癌症的,能被检查出来的概率? 一、精确率和召回率 1、混淆矩阵 在分类任务下,预测结果(Predicted Condition)与正确标记(True Condition)之间存在四种不同的组合,构成混淆矩阵(适…...
如何在macbook上删除文件?Mac删除文件的多种方法
在使用MacBook电脑时,桌面上经常会积累大量的文件,而这些文件可能已经不再需要或已经过时。为了保持桌面的整洁和提高电脑性能,我们需要及时删除这些文件。本文将介绍MacBook怎么删除桌面文件,以及macbook删除桌面文件快捷键。 一…...

Java代码Demo——Map根据key或value排序
Map根据key排序 升序 Demo代码: //使用TreeMap Map<Integer, String> map new TreeMap<>(); map.put(10, "第10名次"); map.put(15, "第15名次"); map.put(1, "第1名次"); map.put(5, "第5名次"); map.put…...
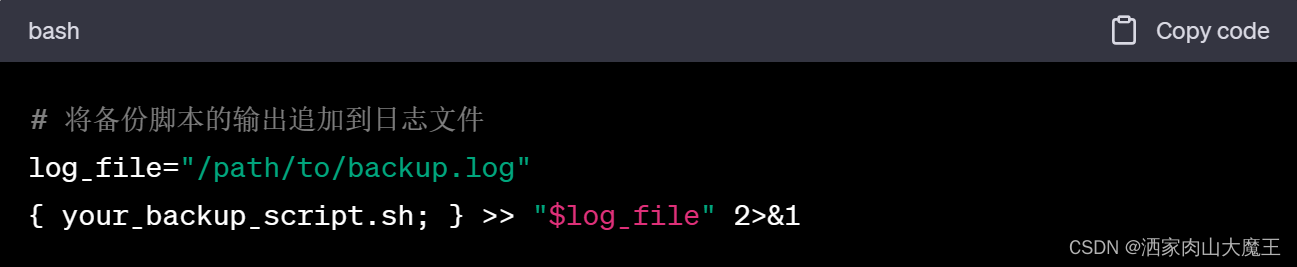
一个Linux自动备份脚本的示例
一个简单的Linux自动备份脚本的示例,根据需要进行自定义: 请确保按照您的需求修改source_dir和backup_dir为要备份的源目录和备份目录的路径。此脚本使用tar命令创建一个以当前日期命名的压缩备份文件,并在备份完成后检查是否成功。此外&…...

[论文阅读]PV-RCNN++
PV-RCNN PV-RCNN: Point-Voxel Feature Set Abstraction With Local Vector Representation for 3D Object Detection 论文网址:PV-RCNN 论文代码:PV-RCNN 简读论文 这篇论文提出了两个用于3D物体检测的新框架PV-RCNN和PV-RCNN,主要的贡献如下: 提出P…...
测试老鸟整理,Postman加密接口测试-Rsa/Aes对参数加密(详细总结)
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 一些问题 postma…...
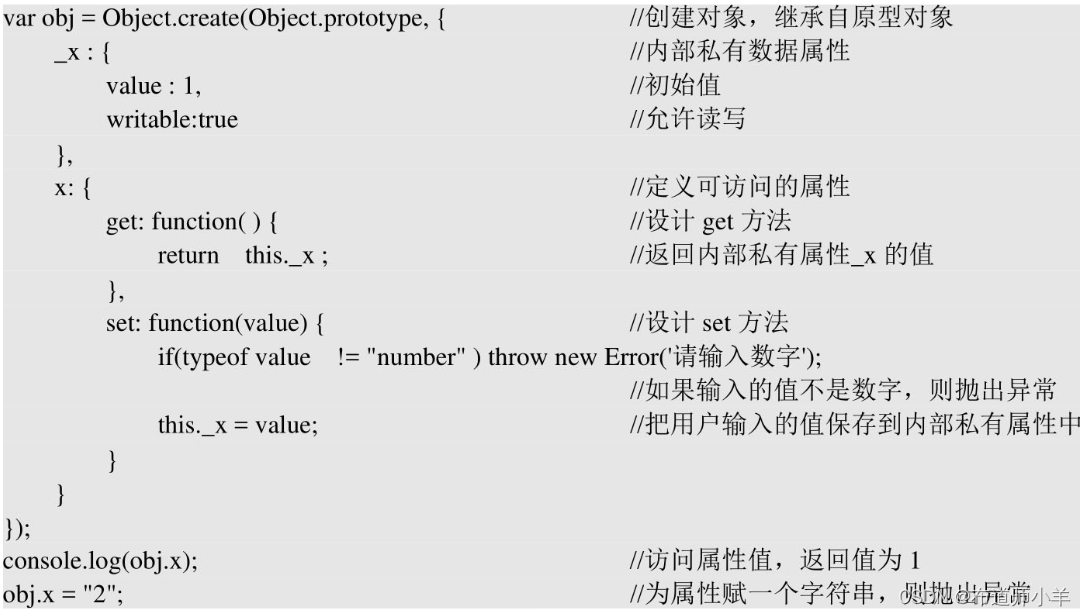
JavaScript使用对象
对象(object)是最基本、最通用的类型,具有复合性结构,属于引用型数据,对象的结构具有弹性,内部的数据是无序的,每个成员被称为属性。在JavaScript中,对象是一个泛化的概念,任何值都可以转换为对…...
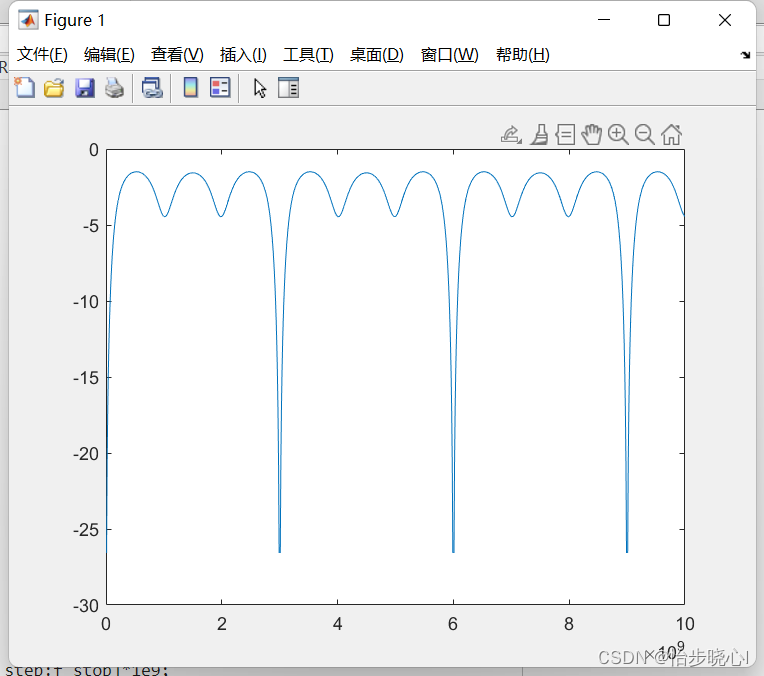
微带线的ABCD矩阵的推导、转换与级联-Matlab计算实例
微带线的ABCD矩阵的推导、转换与级联-Matlab计算实例 散射参数矩阵有实际的物理意义,但是其无法级联计算,但是ABCD参数和传输散射矩阵可以级联计算,在此先简单介绍ABCD参数矩阵的基本用法。 1、微带线的ABCD矩阵的推导 其他的一些常用的二端…...

“网站不安全”该如何解决
当我们的网站被客户访问的时候,经常会出现提示不安全的情况,导致客户的不信任,从而出现客户流失的现象,这种情况我们应该如何解决呢? 首先,我们要确定网站会出现不安全的原因,一般来说ÿ…...

gitlab数据备份和恢复
gitlab数据备份 sudo gitlab-rake gitlab:backup:create备份文件默认存放在/var/opt/gitlab/backups路径下, 生成1697101003_2023_10_12_12.0.3-ee_gitlab_backup.tar 文件 gitlab数据恢复 sudo gitlab-rake gitlab:backup:restore BACKUP1697101003_2023_10_12_…...
嵌入式Linux和stm32区别? 之间有什么关系吗?
嵌入式Linux和stm32区别? 之间有什么关系吗? 主要体现在以下几个方面: 1.硬件资源不同 单片机一般是芯片内部集成flash、ram,ARM一般是CPU,配合外部的flash、ram、sd卡存储器使用。最近很多小伙伴找我,说想要一些嵌…...

【Redis】String字符串类型-内部编码使用场景
文章目录 内部编码使用场景缓存功能计数功能共享会话手机验证码 内部编码 字符串类型的内部编码有3种: int:8个字节(64位)的⻓整型,存储整数embstr:压缩字符串,适用于表示较短的字符串raw&…...

电脑发热发烫,具体硬件温度达到多少度才算异常?
环境: 联想E14 问题描述: 电脑发热发烫,具体硬件温度达到多少度才算异常? 解决方案: 电脑硬件的温度正常范围会因设备类型和使用的具体硬件而有所不同。一般来说,以下是各种硬件的正常温度范围: CPU:正…...
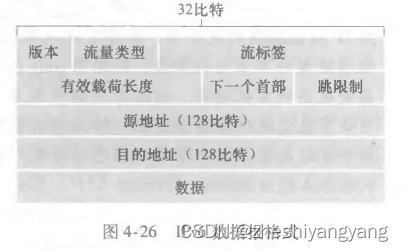
计算机网络第4章-IPv6和寻址
IP地址的分配 为了获取一块IP地址用于一个组织的子网内,于是我们向ISP联系,ISP则会从已分给我们的更大 地址块中提供一些地址。 例如,ISP也许已经分配了地址块200.23.16.0/20。 该ISP可以依次将该地址块分成8个长度相等的连续地址块&…...
Lazarus安装和入门资料
azarus-2.2.6-fpc-3.2.2-win64 下载地址 Lazarus 基础教程 - Lazarus Tutorials for Beginners Lazarus Tutorial #1 - Learning programming_哔哩哔哩_bilibili https://www.devstructor.com/index.php?pagetutorials Lazarus是一款开源免费的object pascal语言RAD IDE&…...

mediapipe流水线分析 二
目标检测 Graph 一 流水线上游输入处理 1 TfLiteConverterCalculator 将输入的数据转换成tensorflow api 支持的Tensor TfLiteTensor 并初始化相关输入输出节点 ,该类的业务主要通过 interpreter std::unique_ptrtflite::Interpreter interpreter_ nullptr; 实现…...
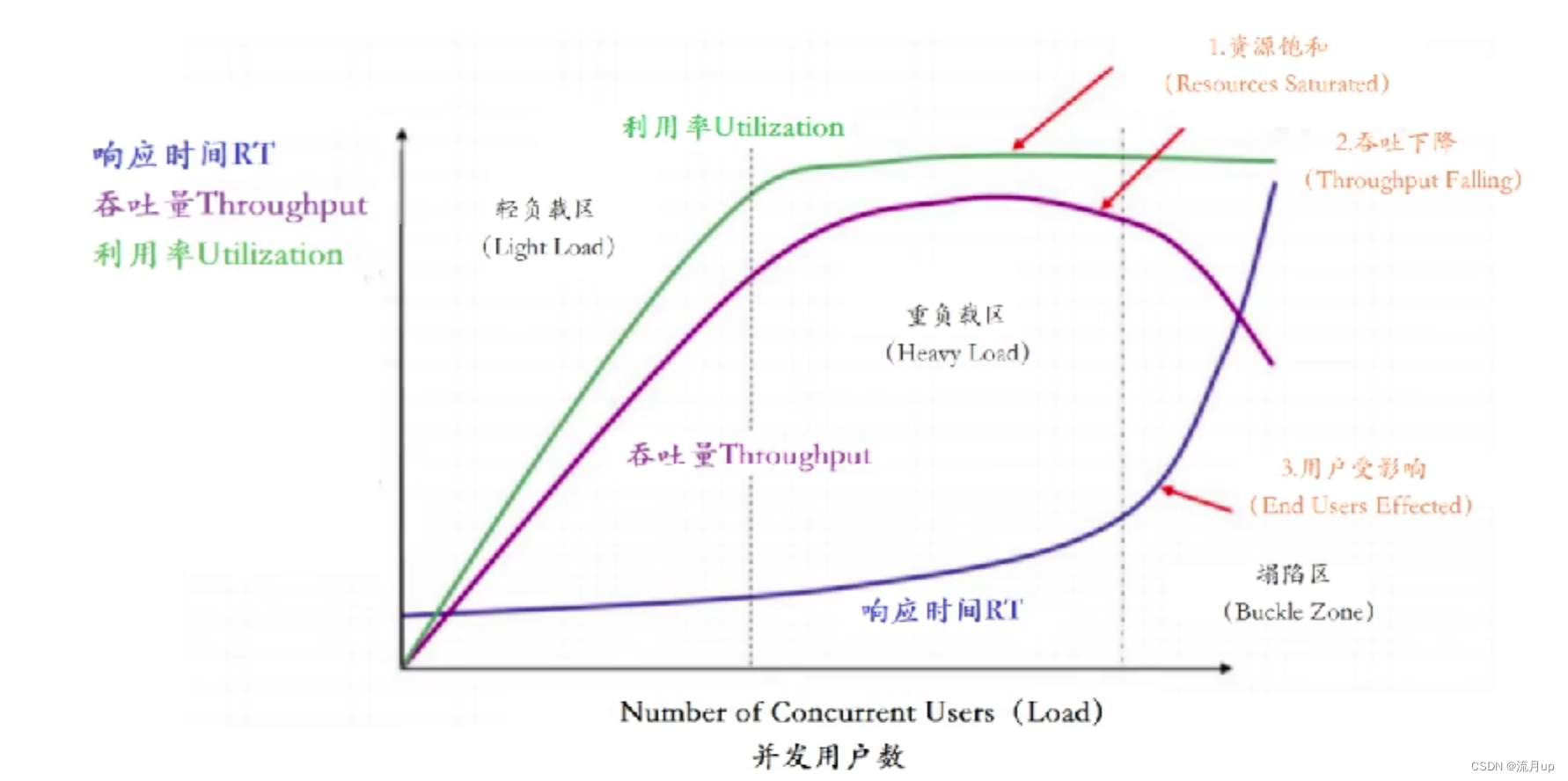
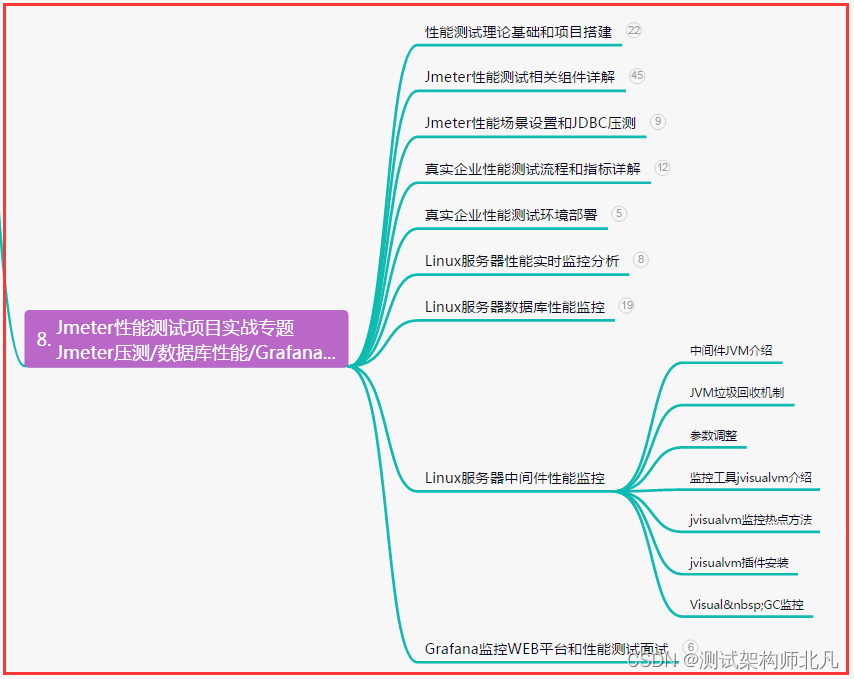
1.性能优化
概述 今日目标: 性能优化的终极目标是什么压力测试压力测试的指标 性能优化的终极目标是什么 用户体验 产品设计(非技术) 系统性能(快,3秒不能更久了) 后端:RT,TPS,并发数 影响因素01:数据库读写,RPCÿ…...

Python爬虫实战:研究MechanicalSoup库相关技术
一、MechanicalSoup 库概述 1.1 库简介 MechanicalSoup 是一个 Python 库,专为自动化交互网站而设计。它结合了 requests 的 HTTP 请求能力和 BeautifulSoup 的 HTML 解析能力,提供了直观的 API,让我们可以像人类用户一样浏览网页、填写表单和提交请求。 1.2 主要功能特点…...
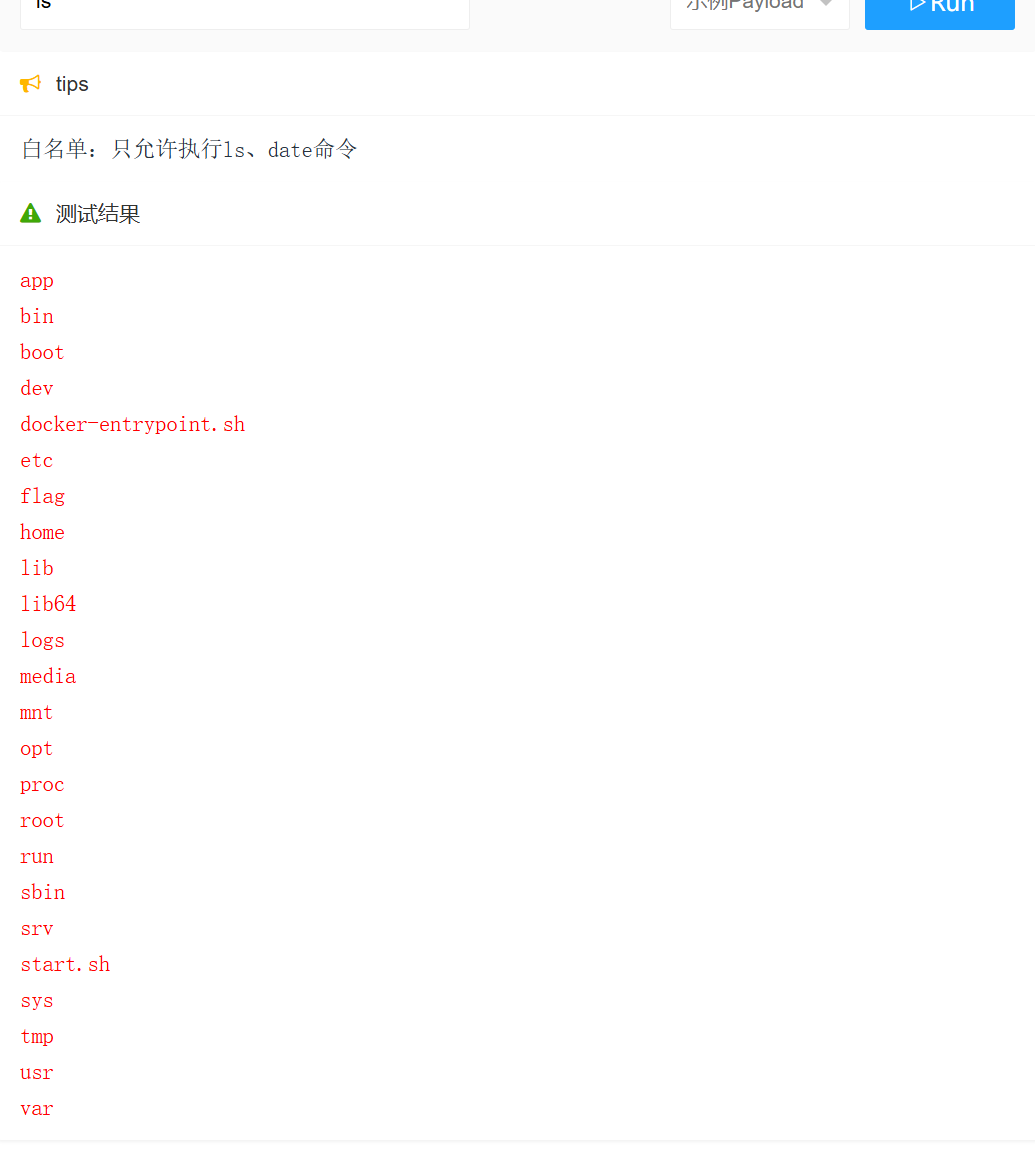
JavaSec-RCE
简介 RCE(Remote Code Execution),可以分为:命令注入(Command Injection)、代码注入(Code Injection) 代码注入 1.漏洞场景:Groovy代码注入 Groovy是一种基于JVM的动态语言,语法简洁,支持闭包、动态类型和Java互操作性,…...
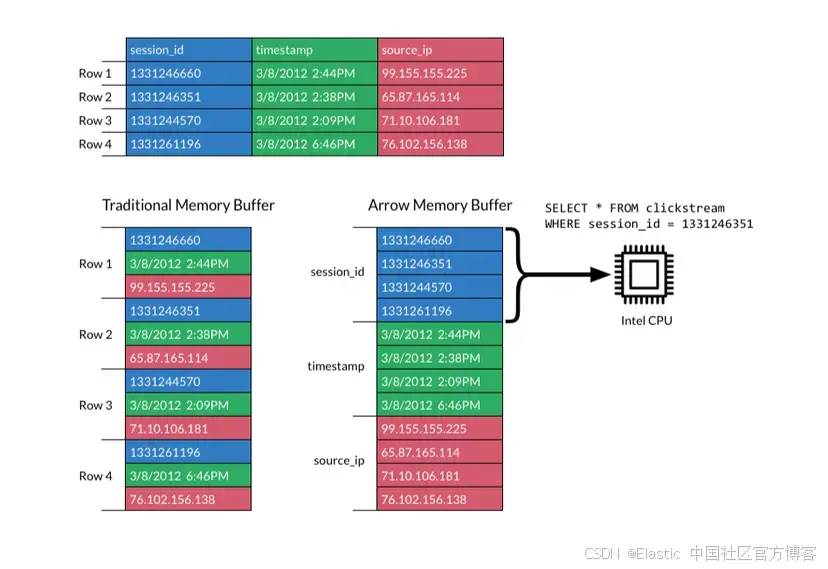
JavaScript 中的 ES|QL:利用 Apache Arrow 工具
作者:来自 Elastic Jeffrey Rengifo 学习如何将 ES|QL 与 JavaScript 的 Apache Arrow 客户端工具一起使用。 想获得 Elastic 认证吗?了解下一期 Elasticsearch Engineer 培训的时间吧! Elasticsearch 拥有众多新功能,助你为自己…...

转转集团旗下首家二手多品类循环仓店“超级转转”开业
6月9日,国内领先的循环经济企业转转集团旗下首家二手多品类循环仓店“超级转转”正式开业。 转转集团创始人兼CEO黄炜、转转循环时尚发起人朱珠、转转集团COO兼红布林CEO胡伟琨、王府井集团副总裁祝捷等出席了开业剪彩仪式。 据「TMT星球」了解,“超级…...

Frozen-Flask :将 Flask 应用“冻结”为静态文件
Frozen-Flask 是一个用于将 Flask 应用“冻结”为静态文件的 Python 扩展。它的核心用途是:将一个 Flask Web 应用生成成纯静态 HTML 文件,从而可以部署到静态网站托管服务上,如 GitHub Pages、Netlify 或任何支持静态文件的网站服务器。 &am…...
)
.Net Framework 4/C# 关键字(非常用,持续更新...)
一、is 关键字 is 关键字用于检查对象是否于给定类型兼容,如果兼容将返回 true,如果不兼容则返回 false,在进行类型转换前,可以先使用 is 关键字判断对象是否与指定类型兼容,如果兼容才进行转换,这样的转换是安全的。 例如有:首先创建一个字符串对象,然后将字符串对象隐…...
Mobile ALOHA全身模仿学习
一、题目 Mobile ALOHA:通过低成本全身远程操作学习双手移动操作 传统模仿学习(Imitation Learning)缺点:聚焦与桌面操作,缺乏通用任务所需的移动性和灵活性 本论文优点:(1)在ALOHA…...

BLEU评分:机器翻译质量评估的黄金标准
BLEU评分:机器翻译质量评估的黄金标准 1. 引言 在自然语言处理(NLP)领域,衡量一个机器翻译模型的性能至关重要。BLEU (Bilingual Evaluation Understudy) 作为一种自动化评估指标,自2002年由IBM的Kishore Papineni等人提出以来,…...
pikachu靶场通关笔记19 SQL注入02-字符型注入(GET)
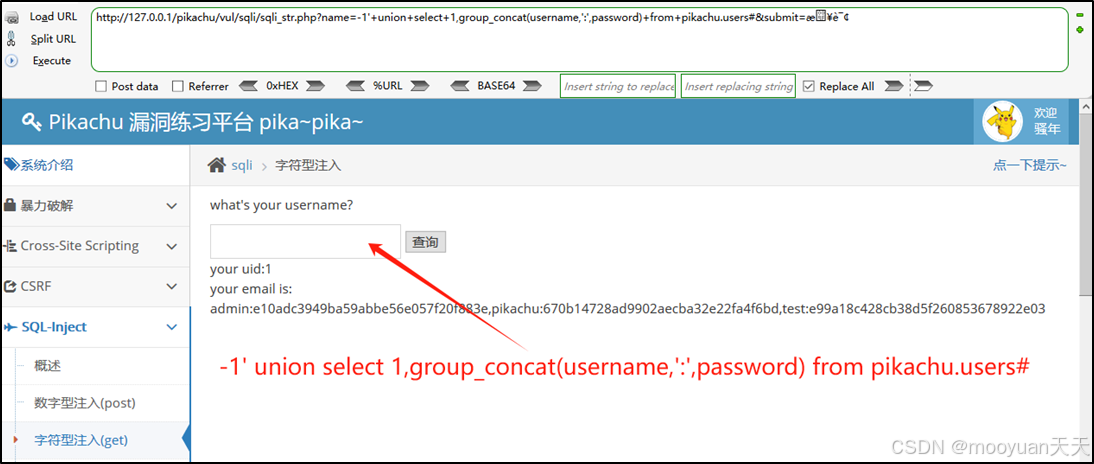
目录 一、SQL注入 二、字符型SQL注入 三、字符型注入与数字型注入 四、源码分析 五、渗透实战 1、渗透准备 2、SQL注入探测 (1)输入单引号 (2)万能注入语句 3、获取回显列orderby 4、获取数据库名database 5、获取表名…...
:LeetCode 142. 环形链表 II(Linked List Cycle II)详解)
Java详解LeetCode 热题 100(26):LeetCode 142. 环形链表 II(Linked List Cycle II)详解
文章目录 1. 题目描述1.1 链表节点定义 2. 理解题目2.1 问题可视化2.2 核心挑战 3. 解法一:HashSet 标记访问法3.1 算法思路3.2 Java代码实现3.3 详细执行过程演示3.4 执行结果示例3.5 复杂度分析3.6 优缺点分析 4. 解法二:Floyd 快慢指针法(…...