计算机视觉:驾驶员疲劳检测
目录
前言
关键点讲解
代码详解
结果展示
改进方向(打哈欠检测疲劳方法)
改进方向(点头检测疲劳)
GUI界面设计展示
前言
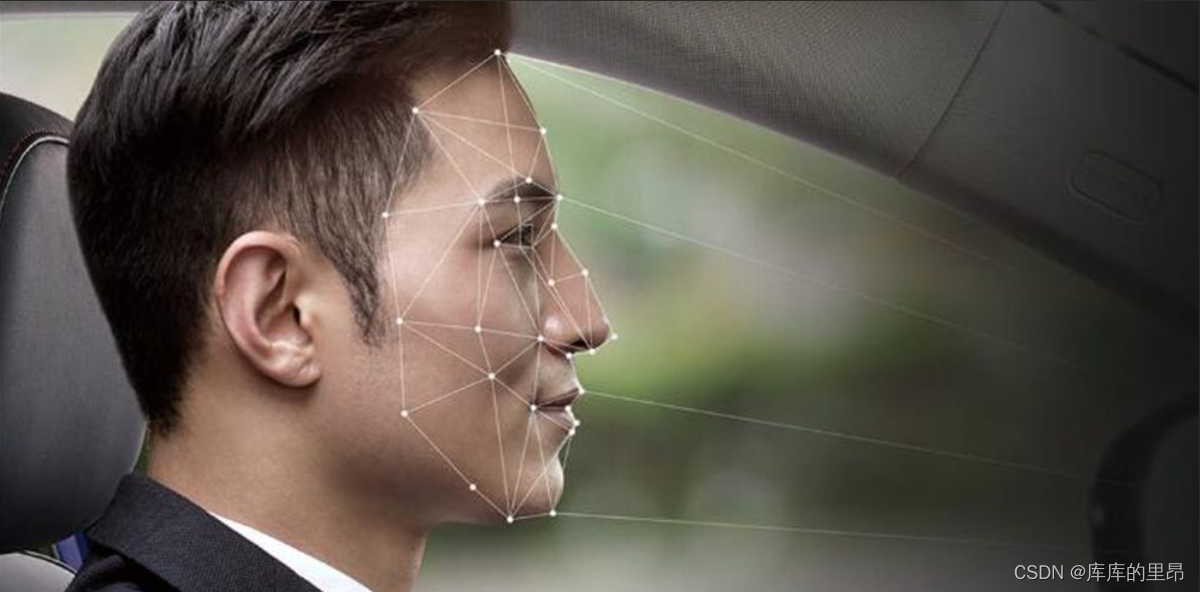
上次博客我们讲到了如何定位人脸,并且在人脸上进行关键点定位。其中包括5点定位和68点定位等,在定位之后呢,我们就可以使用定位信息来做一些相关操作,例如闭眼检测,这里就可以应用到驾驶员的疲劳检测上,或者是经常使用电脑的人,不闭眼可能会导致眼睛干涩等。
关键点讲解
我们本次博客主要讲解通过闭眼来检测疲劳驾驶,那么我们首先就要了解怎么让计算机来判断人是否闭了眼睛。我们通过上次的博客可以知道,我们首先要让计算机识别出来人脸,然后在识别出来的人脸上继续做关键点查找。我们这里用的是68关键点检测。
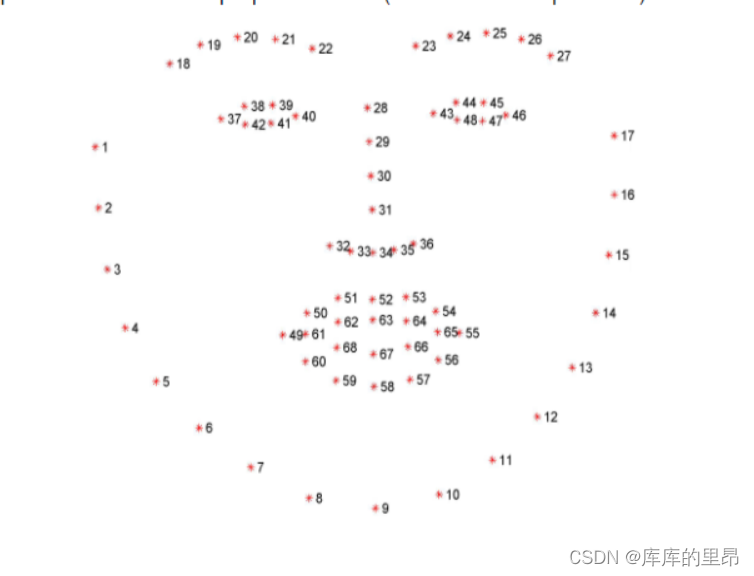
对于眼睛来讲,他每一个眼睛都有6个关键点。这里我们可以通过一种方式来判断是否进行了眨眼。
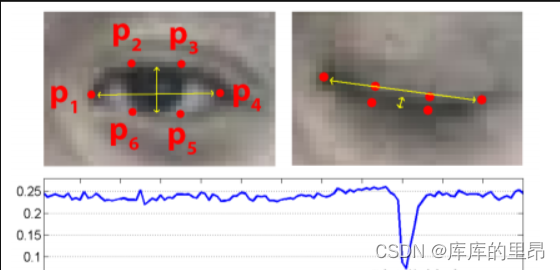
在眼睛的6个关键点中,我们可以发现当睁眼的时候,2和6点以及3和5点的欧氏距离较大。1和4点稍稍距离会增加一点,那么我们可以设定一个公式。

对应在图上就是2点和6点相减,3和5点相减。然后比上2倍的1和4点的差。其中都是绝对值。这样睁眼的时候EAR的数值就会较大,闭眼的时候EAR的数值就会较小。然后我们自己设定一个阈值,如果EAR的数值低于这个阈值超过了视频帧中的几帧。那么我们就认为该驾驶员正在闭眼。
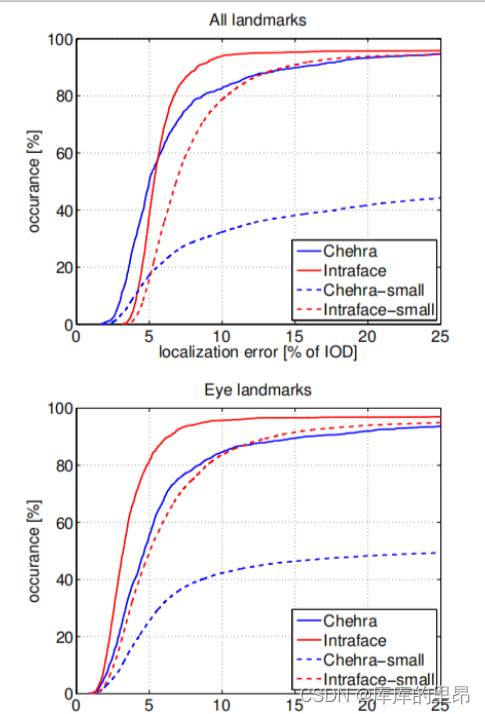
经过了论文验证,说明该方法的准确度是非常可观的,且具有较强的鲁棒性。
代码详解
首先我们导入工具包,这里面也包括了计算欧氏距离的工具包。
from scipy.spatial import distance as dist
from collections import OrderedDict
import numpy as np
import argparse
import time
import dlib
import cv2
然后我们把68点关键点定位信息定位好。
FACIAL_LANDMARKS_68_IDXS = OrderedDict([("mouth", (48, 68)),("right_eyebrow", (17, 22)),("left_eyebrow", (22, 27)),("right_eye", (36, 42)),("left_eye", (42, 48)),("nose", (27, 36)),("jaw", (0, 17))
])
这里"jaw", (0, 17)表示的是下巴的位置的关键点标识分别是0-17点。
然后我们将需要的模型和视频导入到程序当中。关键点检测模型。
ap = argparse.ArgumentParser()
ap.add_argument("-p", "--shape-predictor", required=True,help="path to facial landmark predictor")
ap.add_argument("-v", "--video", type=str, default="",help="path to input video file")
args = vars(ap.parse_args())
EYE_AR_THRESH = 0.3
EYE_AR_CONSEC_FRAMES = 3
这里这两个参数很重要,其中EYE_AR_THRESH这个表示EAR的阈值。如果高于这个阈值说明人这个时候是睁眼的,如果低于这个阈值的话,那么这个时候就要注意了,驾驶员可能在闭眼。而EYE_AR_CONSEC_FRAMES这个表示如果EAR数值超过了三帧及以上我们就可以把他认定为一次闭眼。为什么是三帧呢?因为如果一帧两帧的话可能是其他因素影响的。
COUNTER = 0
TOTAL = 0
然后我们又设定了两个计数器,如果小于阈值那么COUNTER的数值就加一,知道COUNTER的数值大于等于3的时候,这个TOTAL就加一,就说明记录的闭眼了一次。
print("[INFO] loading facial landmark predictor...")
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(args["shape_predictor"])
这里我们就很熟悉了,一个是人脸定位器,一个是关键点检测器。这里分别调出来。
(lStart, lEnd) = FACIAL_LANDMARKS_68_IDXS["left_eye"]
(rStart, rEnd) = FACIAL_LANDMARKS_68_IDXS["right_eye"]
然后我们通过关键点只取两个ROI区域,就是左眼区域和右眼区域。
print("[INFO] starting video stream thread...")
vs = cv2.VideoCapture(args["video"])
随后我们将视频读进来。
while True:# 预处理frame = vs.read()[1]if frame is None:break(h, w) = frame.shape[:2]width=1200r = width / float(w)dim = (width, int(h * r))frame = cv2.resize(frame, dim, interpolation=cv2.INTER_AREA)gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
将视频的展示框放大一点,这里很关键就是如果视频的框框设置的太小的话,可能无法检测到人脸。然后我们就把宽设置成了1200,然后对长度也同比例就行resize操作。最后转换成灰度图。
rects = detector(gray, 0)这里面检测到人脸,将人脸框的四个坐标拿到手。注意就是必须要是对灰度图进行处理。
for rect in rects:# 获取坐标shape = predictor(gray, rect)shape = shape_to_np(shape)
在这里进行人脸框遍历,然后检测68关键点。
def shape_to_np(shape, dtype="int"):# 创建68*2coords = np.zeros((shape.num_parts, 2), dtype=dtype)# 遍历每一个关键点# 得到坐标for i in range(0, shape.num_parts):coords[i] = (shape.part(i).x, shape.part(i).y)return coords
这里就是提取关键点的坐标。
leftEye = shape[lStart:lEnd]rightEye = shape[rStart:rEnd]leftEAR = eye_aspect_ratio(leftEye)rightEAR = eye_aspect_ratio(rightEye)
然后我们把左眼和右眼分别求了一下EAR数值。这里的eye_aspect_ratio函数就是计算EAR数值的。
def eye_aspect_ratio(eye):# 计算距离,竖直的A = dist.euclidean(eye[1], eye[5])B = dist.euclidean(eye[2], eye[4])# 计算距离,水平的C = dist.euclidean(eye[0], eye[3])# ear值ear = (A + B) / (2.0 * C)return ear
其中dist.euclidean表示计算欧式距离,和公式中计算EAR数值一摸一样。
ear = (leftEAR + rightEAR) / 2.0# 绘制眼睛区域leftEyeHull = cv2.convexHull(leftEye)rightEyeHull = cv2.convexHull(rightEye)cv2.drawContours(frame, [leftEyeHull], -1, (0, 255, 0), 1)cv2.drawContours(frame, [rightEyeHull], -1, (0, 255, 0), 1)
然后对于左眼和右眼都进行了EAR求解然后求了一个平均值,然后根据凸包的概念,对眼睛区域进行了绘图。将左眼区域和右眼区域绘图出来。
if ear < EYE_AR_THRESH:COUNTER += 1else:# 如果连续几帧都是闭眼的,总数算一次if COUNTER >= EYE_AR_CONSEC_FRAMES:TOTAL += 1# 重置COUNTER = 0# 显示cv2.putText(frame, "Blinks: {}".format(TOTAL), (10, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.putText(frame, "EAR: {:.2f}".format(ear), (300, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.imshow("Frame", frame)key = cv2.waitKey(10) & 0xFFif key == 27:breakvs.release()
cv2.destroyAllWindows()
最后进行了一次阈值判断,如果EAR连续三帧都小于0.3,那么我们就把TOTAL加一,这样记录一次闭眼的过程。然后最后将EAR数值和TOTAL的数值展示在视频当中。最后完成整体的训练。
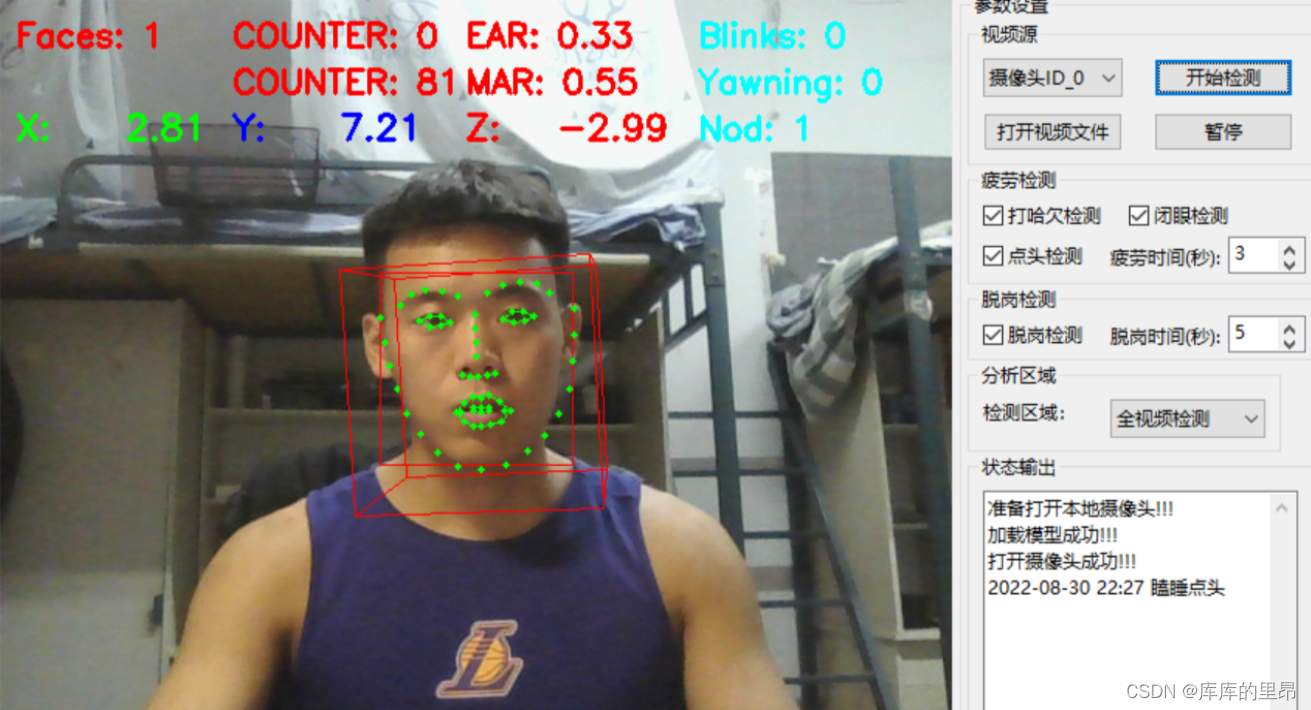
结果展示


改进方向(打哈欠检测疲劳方法)
我们知道在疲劳检测当中,光光检测眨眼可能不是特别准确,因此我们还要在其他可以展示驾驶员疲劳的点来结合展示驾驶员是否处于疲劳驾驶阶段。我们了解到还可以通过嘴巴打哈欠,和点头来展示驾驶员是否疲劳。我们首先来考虑嘴巴打哈欠。
首先我们来看一下嘴巴的关键点。
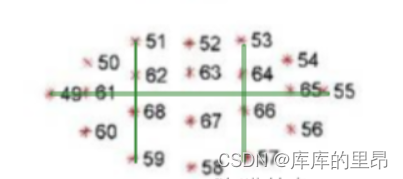
我们使用对眨眼检测的方法继续对嘴巴使用同样的方法检测是否张嘴!对应公式是:
def mouth_aspect_ratio(mouth):A = np.linalg.norm(mouth[2] - mouth[9]) # 51, 59B = np.linalg.norm(mouth[4] - mouth[7]) # 53, 57C = np.linalg.norm(mouth[0] - mouth[6]) # 49, 55mar = (A + B) / (2.0 * C)return mar
这里面我们选择的是嘴部区域内的六个点,来判断驾驶员是否进行了张嘴!
MAR_THRESH = 0.5
MOUTH_AR_CONSEC_FRAMES = 3同样我们也要设置一个阈值,解释同对眨眼检测的时候一样。
(mStart, mEnd) = FACIAL_LANDMARKS_68_IDXS["mouth"]首先我们取到68关键点中对应的嘴部区域。
mouth = shape[mStart:mEnd]
mar = mouth_aspect_ratio(mouth)然后通过函数mouth_aspect_ratio来计算出来mar数值!然后进行凸包检测,并且要画出来。
mouthHull = cv2.convexHull(mouth)cv2.drawContours(frame, [mouthHull], -1, (0, 255, 0), 1)
left = rect.left()#绘制出来人脸框top = rect.top()right = rect.right()bottom = rect.bottom()cv2.rectangle(frame, (left, top), (right, bottom), (0, 255, 0), 3)
这里面我们要加上一点就是说我们要绘制出来人脸框框!
if mar > MAR_THRESH: # 张嘴阈值0.5mCOUNTER += 1cv2.putText(frame, "Yawning!", (10, 60), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)else:# 如果连续3次都小于阈值,则表示打了一次哈欠if mCOUNTER >= MOUTH_AR_CONSEC_FRAMES: # 阈值:3mTOTAL += 1# 重置嘴帧计数器mCOUNTER = 0cv2.putText(frame, "Yawning: {}".format(mTOTAL), (150, 60), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.putText(frame, "mCOUNTER: {}".format(mCOUNTER), (300, 60), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.putText(frame, "MAR: {:.2f}".format(mar), (480, 60), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)
然后进行判断,并且在视频当中展示出来!
改进方向(点头检测疲劳)
检测流程:
2D人脸关键点检测;3D人脸模型匹配;求解3D点和对应2D点的转换关系;根据旋转矩阵求解欧拉角。
一个物体相对于相机的姿态可以使用旋转矩阵和平移矩阵来表示。
!](https://img-blog.csdnimg.cn/a8286dc98d624f4183eed96daab991e2.png)
1. 欧拉角
简单来说,欧拉角就是物体绕坐标系三个坐标轴(x,y,z轴)的旋转角度。
2. 世界坐标系和其他坐标系的转换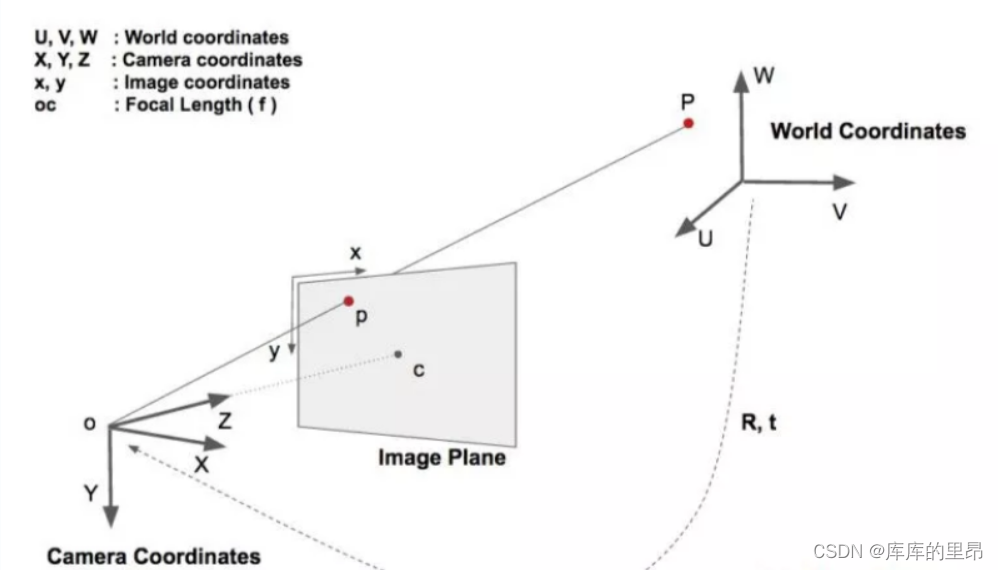
坐标系转换:
相机坐标系到像素坐标系转换:
因此像素坐标系和世界坐标系的关系如下:
然后我们根据论文来定义一下:
object_pts = np.float32([[6.825897, 6.760612, 4.402142], #33左眉左上角[1.330353, 7.122144, 6.903745], #29左眉右角[-1.330353, 7.122144, 6.903745], #34右眉左角[-6.825897, 6.760612, 4.402142], #38右眉右上角[5.311432, 5.485328, 3.987654], #13左眼左上角[1.789930, 5.393625, 4.413414], #17左眼右上角[-1.789930, 5.393625, 4.413414], #25右眼左上角[-5.311432, 5.485328, 3.987654], #21右眼右上角[2.005628, 1.409845, 6.165652], #55鼻子左上角[-2.005628, 1.409845, 6.165652], #49鼻子右上角[2.774015, -2.080775, 5.048531], #43嘴左上角[-2.774015, -2.080775, 5.048531],#39嘴右上角[0.000000, -3.116408, 6.097667], #45嘴中央下角[0.000000, -7.415691, 4.070434]])#6下巴角K = [6.5308391993466671e+002, 0.0, 3.1950000000000000e+002,0.0, 6.5308391993466671e+002, 2.3950000000000000e+002,0.0, 0.0, 1.0]# 等价于矩阵[fx, 0, cx; 0, fy, cy; 0, 0, 1]
# 图像中心坐标系(uv):相机畸变参数[k1, k2, p1, p2, k3]
D = [7.0834633684407095e-002, 6.9140193737175351e-002, 0.0, 0.0, -1.3073460323689292e+000]
reprojectsrc = np.float32([[10.0, 10.0, 10.0],[10.0, 10.0, -10.0],[10.0, -10.0, -10.0],[10.0, -10.0, 10.0],[-10.0, 10.0, 10.0],[-10.0, 10.0, -10.0],[-10.0, -10.0, -10.0],[-10.0, -10.0, 10.0]])
# 绘制正方体12轴
line_pairs = [[0, 1], [1, 2], [2, 3], [3, 0],[4, 5], [5, 6], [6, 7], [7, 4],[0, 4], [1, 5], [2, 6], [3, 7]]
其中reprojectsrc和line_pairs这两个属于矩形和矩形连接框框的操作。后续会用得到。
cam_matrix = np.array(K).reshape(3, 3).astype(np.float32)
dist_coeffs = np.array(D).reshape(5, 1).astype(np.float32)
这里我们对K和D矩阵进行了reshape了一下!
def get_head_pose(shape): # 头部姿态估计# (像素坐标集合)填写2D参考点,注释遵循https://ibug.doc.ic.ac.uk/resources/300-W/# 17左眉左上角/21左眉右角/22右眉左上角/26右眉右上角/36左眼左上角/39左眼右上角/42右眼左上角/# 45右眼右上角/31鼻子左上角/35鼻子右上角/48左上角/54嘴右上角/57嘴中央下角/8下巴角image_pts = np.float32([shape[17], shape[21], shape[22], shape[26], shape[36],shape[39], shape[42], shape[45], shape[31], shape[35],shape[48], shape[54], shape[57], shape[8]])# solvePnP计算姿势——求解旋转和平移矩阵:# rotation_vec表示旋转矩阵,translation_vec表示平移矩阵,cam_matrix与K矩阵对应,dist_coeffs与D矩阵对应。_, rotation_vec, translation_vec = cv2.solvePnP(object_pts, image_pts, cam_matrix, dist_coeffs)# projectPoints重新投影误差:原2d点和重投影2d点的距离(输入3d点、相机内参、相机畸变、r、t,输出重投影2d点)reprojectdst, _ = cv2.projectPoints(reprojectsrc, rotation_vec, translation_vec, cam_matrix, dist_coeffs)reprojectdst = tuple(map(tuple, reprojectdst.reshape(8, 2))) # 以8行2列显示# 计算欧拉角calc euler angle# 参考https://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#decomposeprojectionmatrixrotation_mat, _ = cv2.Rodrigues(rotation_vec) # 罗德里格斯公式(将旋转矩阵转换为旋转向量)pose_mat = cv2.hconcat((rotation_mat, translation_vec)) # 水平拼接,vconcat垂直拼接# decomposeProjectionMatrix将投影矩阵分解为旋转矩阵和相机矩阵_, _, _, _, _, _, euler_angle = cv2.decomposeProjectionMatrix(pose_mat)pitch, yaw, roll = [math.radians(_) for _ in euler_angle]pitch = math.degrees(math.asin(math.sin(pitch)))roll = -math.degrees(math.asin(math.sin(roll)))yaw = math.degrees(math.asin(math.sin(yaw)))print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))return reprojectdst, euler_angle # 投影误差,欧拉角
这里我们对一些关键点进行了定位,并且我们将世界坐标系转化成了2D上的坐标。最后我们通过CV2计算出来了欧拉角,这样我们就可以判断司机是否点头了!

HAR_THRESH = 0.3
NOD_AR_CONSEC_FRAMES = 3
hCOUNTER = 0
hTOTAL = 0
同样这里我们也要设定一个阈值和计数器!
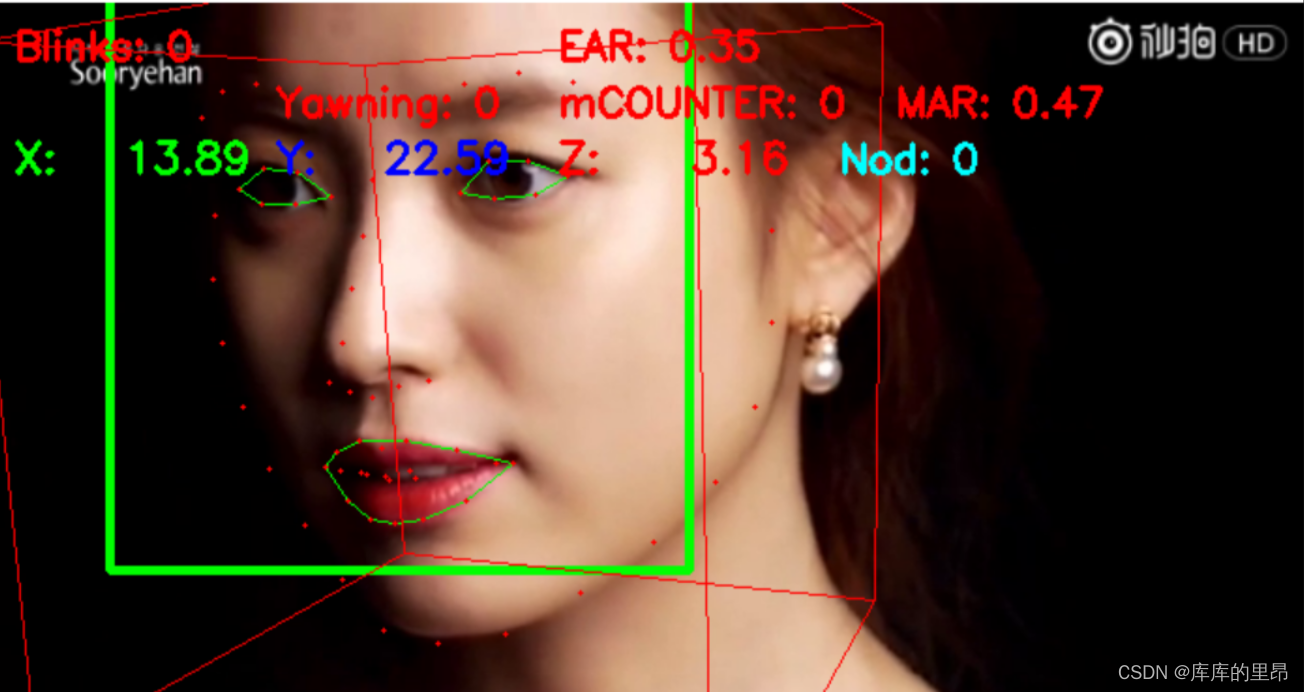
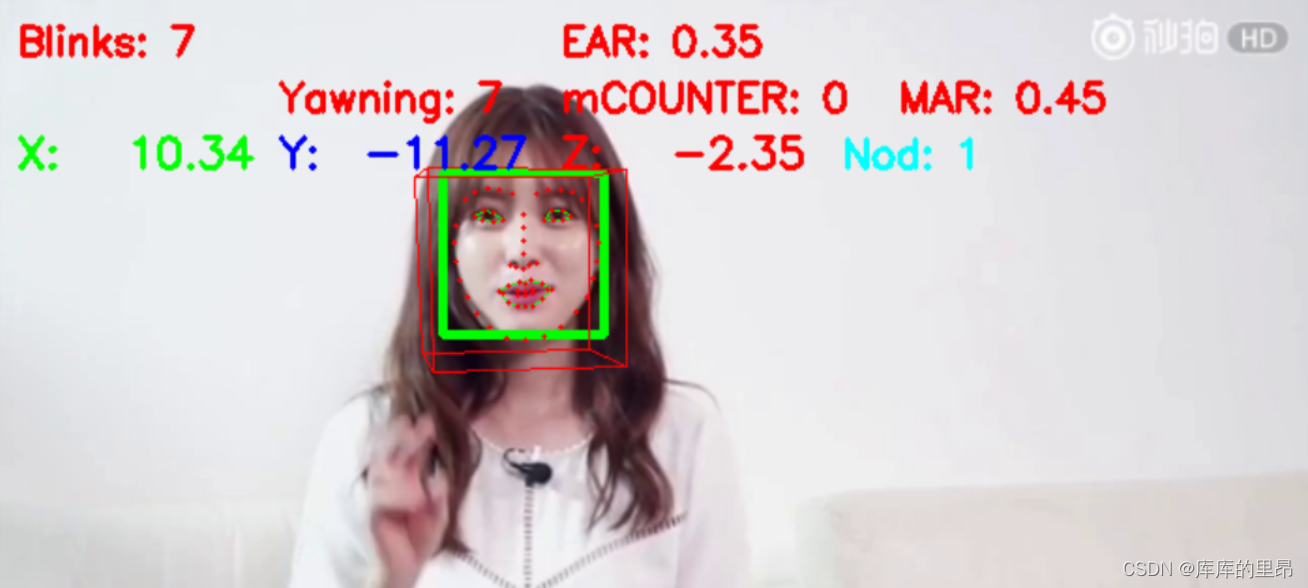
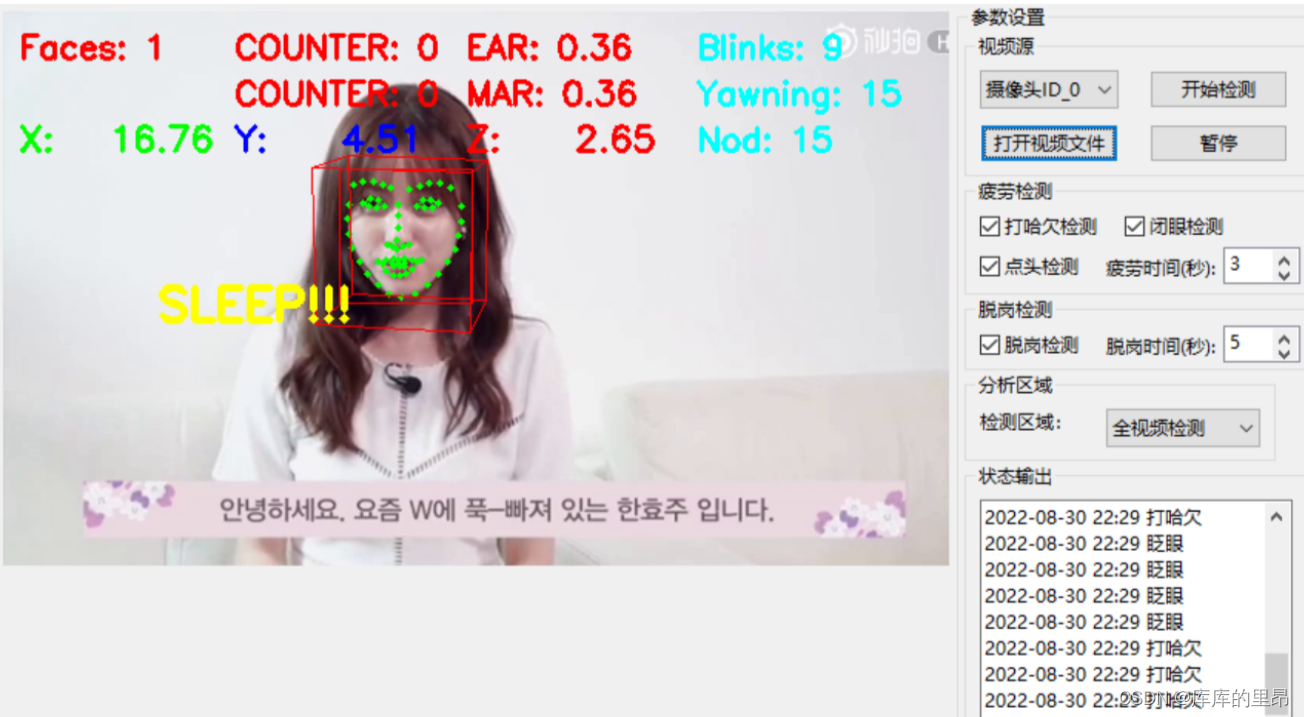
reprojectdst, euler_angle = get_head_pose(shape)har = euler_angle[0, 0] # 取pitch旋转角度if har > HAR_THRESH: # 点头阈值0.3hCOUNTER += 1else:# 如果连续3次都小于阈值,则表示瞌睡点头一次if hCOUNTER >= NOD_AR_CONSEC_FRAMES: # 阈值:3hTOTAL += 1# 重置点头帧计数器hCOUNTER = 0# 绘制正方体12轴for start, end in line_pairs:cv2.line(frame, (int(reprojectdst[start][0]),int(reprojectdst[start][1])), (int(reprojectdst[end][0]),int(reprojectdst[end][1])), (0, 0, 255))# 显示角度结果cv2.putText(frame, "X: " + "{:7.2f}".format(euler_angle[0, 0]), (10, 90), cv2.FONT_HERSHEY_SIMPLEX, 0.75,(0, 255, 0), thickness=2) # GREENcv2.putText(frame, "Y: " + "{:7.2f}".format(euler_angle[1, 0]), (150, 90), cv2.FONT_HERSHEY_SIMPLEX, 0.75,(255, 0, 0), thickness=2) # BLUEcv2.putText(frame, "Z: " + "{:7.2f}".format(euler_angle[2, 0]), (300, 90), cv2.FONT_HERSHEY_SIMPLEX, 0.75,(0, 0, 255), thickness=2) # REDcv2.putText(frame, "Nod: {}".format(hTOTAL), (450, 90), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255, 255, 0), 2)for (x, y) in shape:cv2.circle(frame, (x, y), 1, (0, 0, 255), -1)if TOTAL >= 50 or mTOTAL >= 15:cv2.putText(frame, "SLEEP!!!", (100, 200), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 3)
这里也是一些判断操作和将信息在视频中展示出来。
最后的效果如下:
GUI界面设计展示

如果觉得博主的文章还不错或者您用得到的话,可以免费的关注一下博主,如果三连收藏支持就更好啦!这就是给予我最大的支持!
相关文章:
计算机视觉:驾驶员疲劳检测
目录 前言 关键点讲解 代码详解 结果展示 改进方向(打哈欠检测疲劳方法) 改进方向(点头检测疲劳) GUI界面设计展示 前言 上次博客我们讲到了如何定位人脸,并且在人脸上进行关键点定位。其中包括5点定位和68点定…...
Vue向pdf文件中添加二维码
🚀 场景一:利用vue向pdf文件中写入二维码图片或其他图片 🚀 场景二:向pdf中添加水印 思路: 1、先通过url链接生成二维码,二维码存在于dom中 2、使用html2canvas库将二维码的dom转为一个canvas对象 3、根据c…...

idea一键打包docker镜像并推送远程harbor仓库的方法(包含spotify和fabric8两种方法)--全网唯一正确,秒杀99%水文
我看了很多关于idea一键打包docker镜像并推送harbor仓库的文章,不论国内国外的,基本上99%都是瞎写的, 这些人不清楚打包插件原理,然后就是复制粘贴一大篇,写了一堆垃圾,然后别人拿来也不能用。 然后这篇文…...
)
程序设计:C++11原子 写优先的读写锁(源码详解二:操作跟踪)
本文承接程序设计:C11原子 写优先的读写锁(源码详解)-CSDN博客 上文已经列出了完整代码,完整代码里面增加了操作跟踪,这里就讲解一下这部分是如何实现的。 操作跟踪有两个层面:进程层面和线程层面。 由于这…...

Django视图层解析
Django视图(View)是Django Web框架中负责处理HTTP请求和返回HTTP响应的组件。视图是一段Python代码,接收HTTP请求作为输入,处理请求并返回HTTP响应作为输出。Django视图的主要目的是实现Web应用程序的业务逻辑,将模型和…...
)
JAVA使用RXTXcomm进行串口通信(一)
首先下载相应的jar文件 压缩包包括:RXTXcomm.jar(64位环境)、win32com.dll和javax.comm.properties。 下载地址:https://www.aliyundrive.com/s/JSeSQsAyYeZ 点击链接保存,或者复制本段内容,打开「阿里云盘」APP ,无需下载极速在线查看&#…...
Vue+ElementUI技巧分享:自定义表单项label的文字提示
文章目录 概要在表单项label后添加文字提示1. 使用 Slot 自定义 Label2. 添加问号图标与提示信息 slot的作用详解1. 基本用法2. 具名插槽 显示多行文字提示的方法1. 问题背景2. 实现多行内容显示3. 样式优化 结语 概要 在Vue和ElementUI的丰富组件库中,定制化表单是…...

【QML】警告Name is declared more than once
1. 问题: qml函数中的不同块中定义同名变量,报警:Name is declared more than once 举例: function test(a){if(a "1"){var re 1;console.log(re);}else{var re 2; //这里会报警:Name is declared mor…...
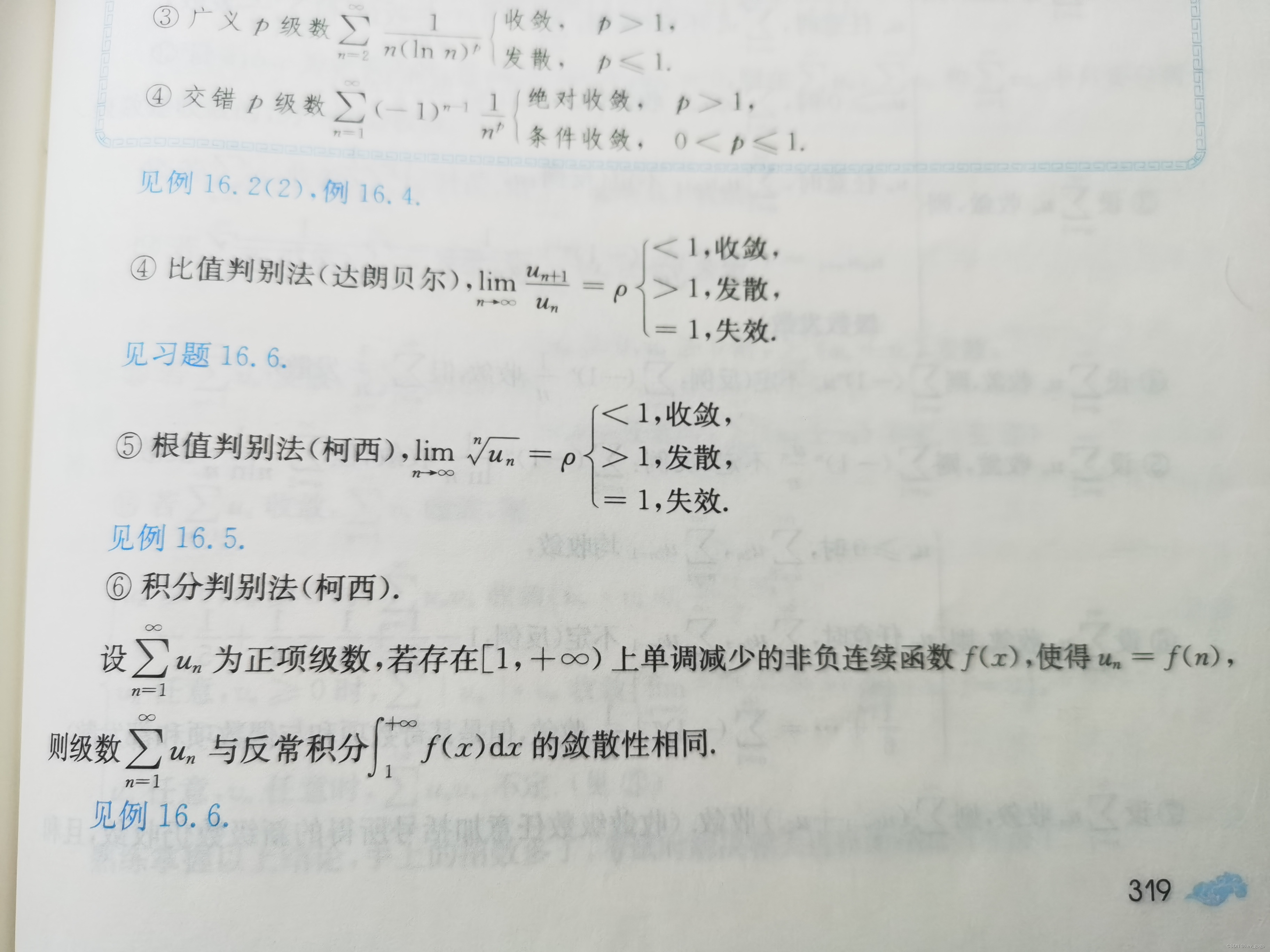
【自用总结】正项级数审敛法的总结
注:收敛半径的求法就是lim n->∞ |an1/an| ρ,而ρ1/R,最基本的不能忘。 比较判别法:从某项起,该级数后面的项均小于等于另一级数,则敛散性可进行一定的比较 可以看到,比较判别法实际上比较…...

ARMv8平台上安装QT开发环境
安装Qt Creator sudo -iapt-get update apt-get upgrade apt list --installed | grep -v oldstable | cut -d/ -f1 | xargs apt-mark unholdapt-get install gcc g clang make-guile build-essential qtbase5-dev qtchooser qt5-qmake qtbase5-dev-tools qtcreator qt5* 配置…...

基于人工电场算法优化概率神经网络PNN的分类预测 - 附代码
基于人工电场算法优化概率神经网络PNN的分类预测 - 附代码 文章目录 基于人工电场算法优化概率神经网络PNN的分类预测 - 附代码1.PNN网络概述2.变压器故障诊街系统相关背景2.1 模型建立 3.基于人工电场优化的PNN网络5.测试结果6.参考文献7.Matlab代码 摘要:针对PNN神…...

在服务器导出kafka topic数据
使用Kafka自带的工具:Kafka提供了一个命令行工具kafka-console-consumer,可以用来消费指定Topic的数据并将其打印到控制台。 1.打印到控制台 命令如下: kafka-console-consumer.sh --bootstrap-server $kafkaHost --topic $topicName --from-…...

农户建档管理系统的设计与实现-计算机毕业设计源码20835
摘 要 随着互联网趋势的到来,各行各业都在考虑利用互联网将自己推广出去,最好方式就是建立自己的互联网系统,并对其进行维护和管理。在现实运用中,应用软件的工作规则和开发步骤,采用Java技术建设农户建档管理系统。 本…...
)
uniapp的Vue2,Vue3配置跨域(proxy代理)
vue2 找到manifest.json文件,通过源码视图的方式打开文件:在文件中添加一下代码即可完成代理: "h5": {"devServer": {"disableHostCheck": true, //禁止访问本地host文件"port": 8000, //修改项目…...
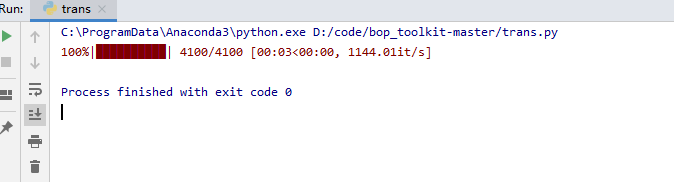
处理BOP数据集,将其和COCO数据集结合
处理BOP数据集,将其和COCO数据集结合 BOP 取消映射关系,并自增80 取消文件名的images前缀 import os import json from tqdm import tqdm import argparseparser argparse.ArgumentParser() parser.add_argument(--json_path, defaultH:/Dataset/COCO…...

跟李沐学AI-深度学习课程05线性代数
线性代数 🏷sec_linear-algebra 在介绍完如何存储和操作数据后,接下来将简要地回顾一下部分基本线性代数内容。 这些内容有助于读者了解和实现本书中介绍的大多数模型。 本节将介绍线性代数中的基本数学对象、算术和运算,并用数学符号和相应…...

电子病历编辑器源码(Springboot+原生HTML)
一、系统简介 本系统主要面向医院医生、护士,提供对住院病人的电子病历书写、保存、修改、打印等功能。本系统基于云端SaaS服务方式,通过浏览器方式访问和使用系统功能,提供电子病历在线制作、管理和使用的一体化电子病历解决方案,…...

Qt的日志输出
在Qt中,一般习惯使用qDebug信息进行输出和打印调试信息到console或者文件中,在qDebug中,也有一些小技巧,可以帮助我们更好的使用qDebug打印日志记录,本文分享了qDebug使用的一些小技巧。 1. 打印出文件名、行号、调用函…...

基于热交换算法优化概率神经网络PNN的分类预测 - 附代码
基于热交换算法优化概率神经网络PNN的分类预测 - 附代码 文章目录 基于热交换算法优化概率神经网络PNN的分类预测 - 附代码1.PNN网络概述2.变压器故障诊街系统相关背景2.1 模型建立 3.基于热交换优化的PNN网络5.测试结果6.参考文献7.Matlab代码 摘要:针对PNN神经网络…...
main.js 中的 render函数
按照之前的单组件文件中的写法,我们的写法应该是这样的 import App from ./App.vuenew Vue({el: #app,templete: <App></App>,components: {App}, }) 1、定义el根节点。2、注册App组件。3、渲染 templete 模板 但是在脚手架工程中,他是这…...
从WWDC看苹果产品发展的规律
WWDC 是苹果公司一年一度面向全球开发者的盛会,其主题演讲展现了苹果在产品设计、技术路线、用户体验和生态系统构建上的核心理念与演进脉络。我们借助 ChatGPT Deep Research 工具,对过去十年 WWDC 主题演讲内容进行了系统化分析,形成了这份…...

【Go】3、Go语言进阶与依赖管理
前言 本系列文章参考自稀土掘金上的 【字节内部课】公开课,做自我学习总结整理。 Go语言并发编程 Go语言原生支持并发编程,它的核心机制是 Goroutine 协程、Channel 通道,并基于CSP(Communicating Sequential Processes࿰…...
详解:相对定位 绝对定位 固定定位)
css的定位(position)详解:相对定位 绝对定位 固定定位
在 CSS 中,元素的定位通过 position 属性控制,共有 5 种定位模式:static(静态定位)、relative(相对定位)、absolute(绝对定位)、fixed(固定定位)和…...
)
OpenLayers 分屏对比(地图联动)
注:当前使用的是 ol 5.3.0 版本,天地图使用的key请到天地图官网申请,并替换为自己的key 地图分屏对比在WebGIS开发中是很常见的功能,和卷帘图层不一样的是,分屏对比是在各个地图中添加相同或者不同的图层进行对比查看。…...
佰力博科技与您探讨热释电测量的几种方法
热释电的测量主要涉及热释电系数的测定,这是表征热释电材料性能的重要参数。热释电系数的测量方法主要包括静态法、动态法和积分电荷法。其中,积分电荷法最为常用,其原理是通过测量在电容器上积累的热释电电荷,从而确定热释电系数…...
使用LangGraph和LangSmith构建多智能体人工智能系统
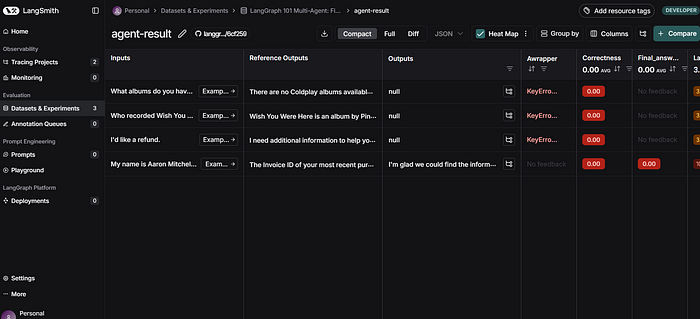
现在,通过组合几个较小的子智能体来创建一个强大的人工智能智能体正成为一种趋势。但这也带来了一些挑战,比如减少幻觉、管理对话流程、在测试期间留意智能体的工作方式、允许人工介入以及评估其性能。你需要进行大量的反复试验。 在这篇博客〔原作者&a…...
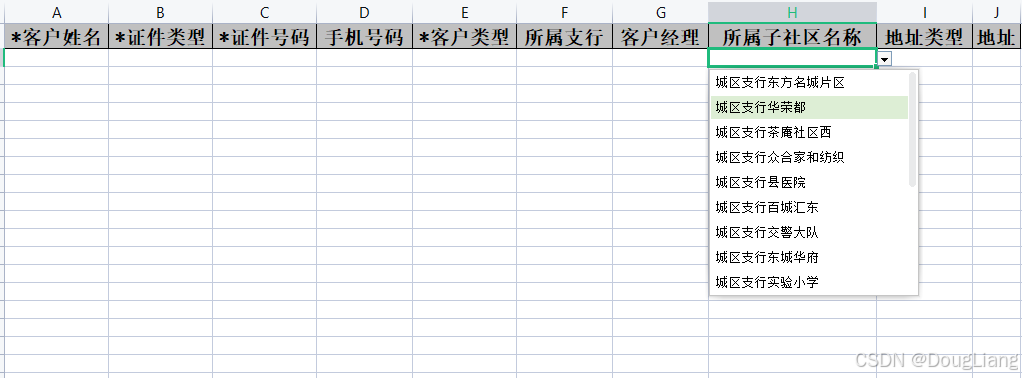
关于easyexcel动态下拉选问题处理
前些日子突然碰到一个问题,说是客户的导入文件模版想支持部分导入内容的下拉选,于是我就找了easyexcel官网寻找解决方案,并没有找到合适的方案,没办法只能自己动手并分享出来,针对Java生成Excel下拉菜单时因选项过多导…...

Kubernetes 网络模型深度解析:Pod IP 与 Service 的负载均衡机制,Service到底是什么?
Pod IP 的本质与特性 Pod IP 的定位 纯端点地址:Pod IP 是分配给 Pod 网络命名空间的真实 IP 地址(如 10.244.1.2)无特殊名称:在 Kubernetes 中,它通常被称为 “Pod IP” 或 “容器 IP”生命周期:与 Pod …...

【版本控制】GitHub Desktop 入门教程与开源协作全流程解析
目录 0 引言1 GitHub Desktop 入门教程1.1 安装与基础配置1.2 核心功能使用指南仓库管理日常开发流程分支管理 2 GitHub 开源协作流程详解2.1 Fork & Pull Request 模型2.2 完整协作流程步骤步骤 1: Fork(创建个人副本)步骤 2: Clone(克隆…...

LeetCode 0386.字典序排数:细心总结条件
【LetMeFly】386.字典序排数:细心总结条件 力扣题目链接:https://leetcode.cn/problems/lexicographical-numbers/ 给你一个整数 n ,按字典序返回范围 [1, n] 内所有整数。 你必须设计一个时间复杂度为 O(n) 且使用 O(1) 额外空间的算法。…...