【深度学习】强化学习(三)强化学习的目标函数
文章目录
- 一、强化学习问题
- 1、交互的对象
- 2、强化学习的基本要素
- 3、策略(Policy)
- 4、马尔可夫决策过程
- 5、强化学习的目标函数
- 1. 总回报(Return)
- 2. 折扣回报(Discounted Return)
- a. 折扣率
- b. 折扣回报的定义
- 3. 目标函数
- a. 目标函数的定义
- 2. 目标函数的解释
- 3. 优化目标
- 4、智能体走迷宫
- a. 问题
- b. 解析
一、强化学习问题
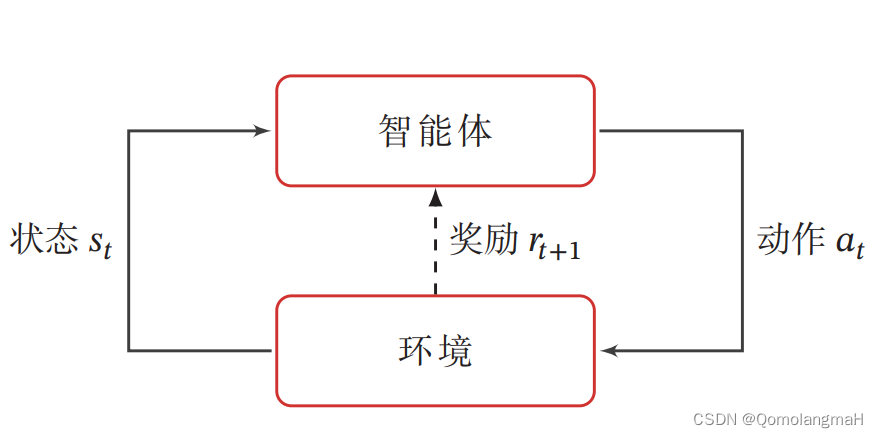
强化学习的基本任务是通过智能体与环境的交互学习一个策略,使得智能体能够在不同的状态下做出最优的动作,以最大化累积奖励。这种学习过程涉及到智能体根据当前状态选择动作,环境根据智能体的动作转移状态,并提供即时奖励的循环过程。
1、交互的对象
在强化学习中,有两个可以进行交互的对象:智能体和环境
-
智能体(Agent):能感知外部环境的状态(State)和获得的奖励(Reward),并做出决策(Action)。智能体的决策和学习功能使其能够根据状态选择不同的动作,学习通过获得的奖励来调整策略。
-
环境(Environment):是智能体外部的所有事物,对智能体的动作做出响应,改变状态,并反馈相应的奖励。
2、强化学习的基本要素
强化学习涉及到智能体与环境的交互,其基本要素包括状态、动作、策略、状态转移概率和即时奖励。
-
状态(State):对环境的描述,可能是离散或连续的。
-
动作(Action):智能体的行为,也可以是离散或连续的。
-
策略(Policy):智能体根据当前状态选择动作的概率分布。
-
状态转移概率(State Transition Probability):在给定状态和动作的情况下,环境转移到下一个状态的概率。
-
即时奖励(Immediate Reward):智能体在执行动作后,环境反馈的奖励。
3、策略(Policy)
策略(Policy)就是智能体如何根据环境状态 𝑠 来决定下一步的动作 𝑎(智能体在特定状态下选择动作的规则或分布)。
- 确定性策略(Deterministic Policy) 直接指定智能体应该采取的具体动作
- 随机性策略(Stochastic Policy) 则考虑了动作的概率分布,增加了对不同动作的探索。
上述概念可详细参照:【深度学习】强化学习(一)强化学习定义
4、马尔可夫决策过程
为了简化描述,将智能体与环境的交互看作离散的时间序列。智能体从感知到的初始环境 s 0 s_0 s0 开始,然后决定做一个相应的动作 a 0 a_0 a0,环境相应地发生改变到新的状态 s 1 s_1 s1,并反馈给智能体一个即时奖励 r 1 r_1 r1,然后智能体又根据状态 s 1 s_1 s1做一个动作 a 1 a_1 a1,环境相应改变为 s 2 s_2 s2,并反馈奖励 r 2 r_2 r2。这样的交互可以一直进行下去: s 0 , a 0 , s 1 , r 1 , a 1 , … , s t − 1 , r t − 1 , a t − 1 , s t , r t , … , s_0, a_0, s_1, r_1, a_1, \ldots, s_{t-1}, r_{t-1}, a_{t-1}, s_t, r_t, \ldots, s0,a0,s1,r1,a1,…,st−1,rt−1,at−1,st,rt,…,其中 r t = r ( s t − 1 , a t − 1 , s t ) r_t = r(s_{t-1}, a_{t-1}, s_t) rt=r(st−1,at−1,st) 是第 t t t 时刻的即时奖励。这个交互过程可以被视为一个马尔可夫决策过程(Markov Decision Process,MDP)。
关于马尔可夫决策过程可详细参照:【深度学习】强化学习(二)马尔可夫决策过程
5、强化学习的目标函数
强化学习的目标是通过学习到的策略 π θ ( a ∣ s ) \pi_{\theta}(a|s) πθ(a∣s) 来最大化期望回报(Expected Return),即希望智能体执行一系列动作以获取尽可能多的平均回报。
- 总回报:对于一次交互过程的轨迹,总回报是累积奖励的和。
- 折扣回报:引入折扣率,考虑未来奖励的权重。
1. 总回报(Return)
总回报(Total Return)指智能体与环境一次交互过程中所累积的奖励。给定一个策略 π ( a ∣ s ) \pi(a|s) π(a∣s),智能体与环境的交互过程可以通过轨迹 τ \tau τ 来表示,而这个轨迹的总回报 G ( τ ) G(\tau) G(τ) 可以通过累积奖励的方式进行计算。
-
总回报 G ( τ ) G(\tau) G(τ) 定义:
G ( τ ) = ∑ t = 0 T − 1 r t + 1 G(\tau) = \sum_{t=0}^{T-1} r_{t+1} G(τ)=t=0∑T−1rt+1其中 T T T 表示交互的总时长, r t + 1 r_{t+1} rt+1 表示在时刻 t + 1 t+1 t+1 获得的即时奖励。 -
总回报也可以通过奖励函数的形式表示:
G ( τ ) = ∑ t = 0 T − 1 r ( s t , a t , s t + 1 ) G(\tau) = \sum_{t=0}^{T-1} r(s_t, a_t, s_{t+1}) G(τ)=t=0∑T−1r(st,at,st+1)
这里, r ( s t , a t , s t + 1 ) r(s_t, a_t, s_{t+1}) r(st,at,st+1) 表示在状态 s t s_t st 下执行动作 a t a_t at 后转移到状态 s t + 1 s_{t+1} st+1 所获得的奖励。
2. 折扣回报(Discounted Return)
a. 折扣率
对于存在终止状态(Terminal State)的任务,当智能体到达终止状态时,交互过程结束,这一轮的交互称为一个回合(Episode)或试验(Trial)。一般强化学习任务都是回合式任务(Episodic Task),如下棋、玩游戏等。
然而,对于一些持续式任务(Continuing Task),其中不存在终止状态,智能体的交互可以无限进行下去,即 T = ∞ T = \infty T=∞。在这种情况下,总回报可能会无穷大。为了解决这个问题,引入了折扣率 γ \gamma γ。
b. 折扣回报的定义
-
折扣回报(Discounted Return)定义:
G ( τ ) = ∑ t = 0 T − 1 γ t r t + 1 G(\tau) = \sum_{t=0}^{T-1} \gamma^t r_{t+1} G(τ)=t=0∑T−1γtrt+1
其中 γ \gamma γ 是折扣率, γ ∈ [ 0 , 1 ] \gamma \in [0, 1] γ∈[0,1]。折扣率的引入可以看作是对未来奖励的一种降权,即智能体更加关注即时奖励和近期奖励,而对于远期奖励的关注逐渐减弱。- 当 γ \gamma γ 接近于 1 时,更加关注长期回报;
- 当 γ \gamma γ 接近于 0 时,更加关注短期回报。
-
折扣回报的定义在数学上确保了总回报的有限性,同时在实际应用中使得智能体更好地平衡长期和短期回报。
3. 目标函数
强化学习的目标是通过学习一个良好的策略来使智能体在与环境的交互中获得尽可能多的平均回报。
a. 目标函数的定义
强化学习的目标函数 J ( θ ) J(\theta) J(θ) 定义如下:
J ( θ ) = E τ ∼ p θ ( τ ) [ G ( τ ) ] = E τ ∼ p θ ( τ ) [ ∑ t = 0 T − 1 γ t r t + 1 ] J(\theta) = \mathbb{E}_{\tau \sim p_{\theta}(\tau)}[G(\tau)] = \mathbb{E}_{\tau \sim p_{\theta}(\tau)}\left[\sum_{t=0}^{T-1} \gamma^t r_{t+1}\right] J(θ)=Eτ∼pθ(τ)[G(τ)]=Eτ∼pθ(τ)[t=0∑T−1γtrt+1]其中, θ \theta θ 表示策略函数的参数, τ \tau τ 表示强化学习的轨迹。
- 这个目标函数表达的是在策略 π θ \pi_{\theta} πθ 下,智能体与环境交互得到的总回报的期望。(这个期望是对所有可能的轨迹进行的)
2. 目标函数的解释
- J ( θ ) J(\theta) J(θ) 可以看作是在策略 π θ \pi_{\theta} πθ 下执行动作序列的期望回报。
- 引入折扣率 γ \gamma γ 是为了在计算期望回报时对未来奖励进行折扣,使得智能体更加关注即时奖励和近期奖励。
- 目标函数 J ( θ ) J(\theta) J(θ) 的最大化等价于寻找最优的策略参数 θ \theta θ,使得智能体在与环境的交互中获得最大的长期回报。
3. 优化目标
强化学习的优化目标就是通过调整策略函数的参数 θ \theta θ,使得目标函数 J ( θ ) J(\theta) J(θ) 达到最大值。这个优化问题通常通过梯度上升等优化方法来解决,其中梯度由策略梯度定理给出。
4、智能体走迷宫
a. 问题
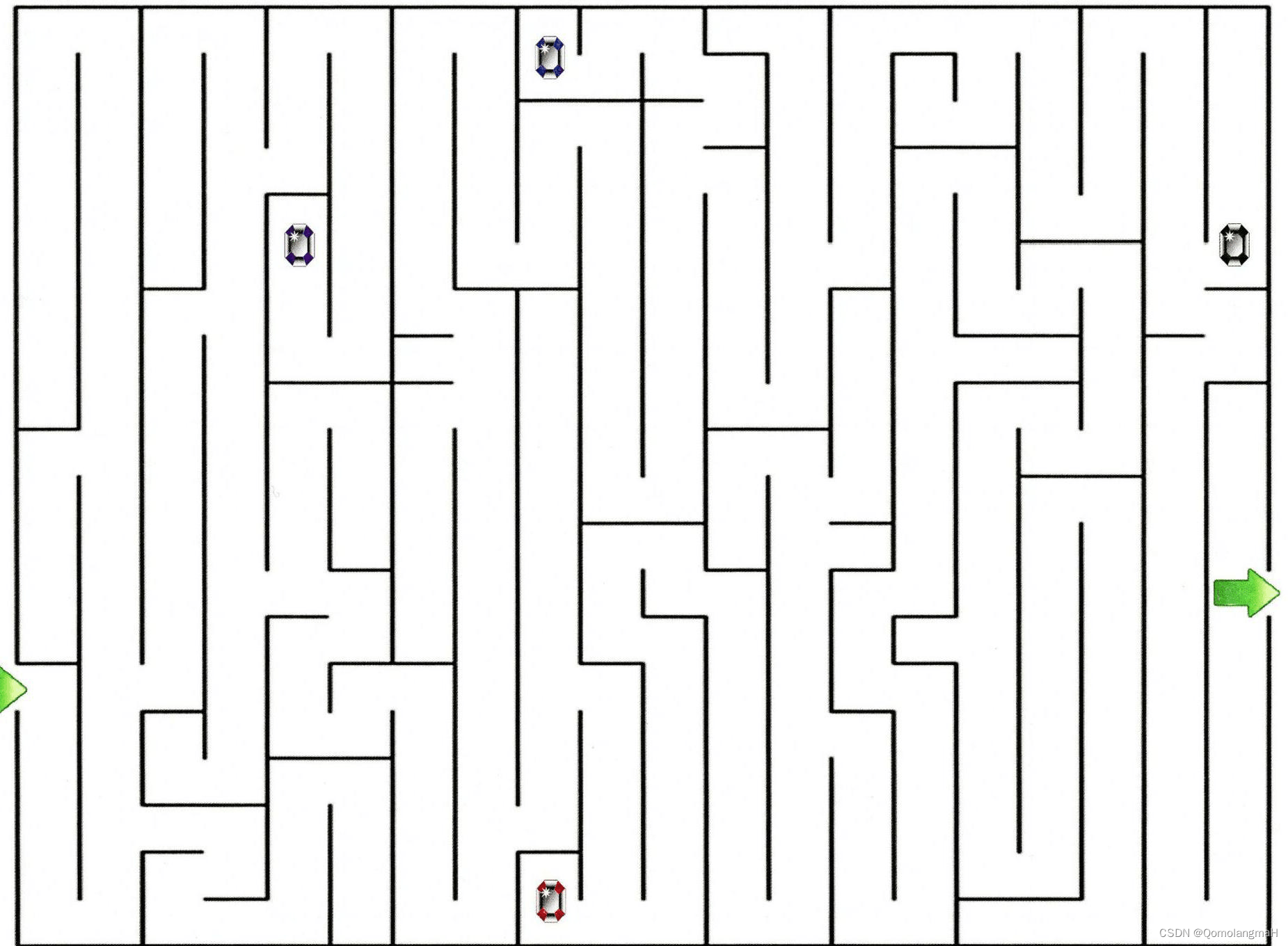
让一个智能体通过强化学习来学习走迷宫,如果智能体走出迷宫,奖励为 +1,其他状态奖励为 0.智能体的目标是最大化期望回报.当折扣率 𝛾 = 1 时,智能体是否能学会走迷宫的技巧?如何改进?
b. 解析
走迷宫任务存在终止状态(即走出迷宫),为回合式任务,智能体的交互不会无限地进行下去。由题意,当智能体出迷宫时有奖励+1,其他时刻奖励均为0。若折扣率为1,当该策略无法走出迷宫时,不会取得回报;当该策略可以走出迷宫,虽然达到了目标,但或许存在“绕远”的情况,即此时不一定为最优策略。
- 改进
- 尝试不同的折扣率:尝试使用较小的折扣率(0~1之间),以降低远期回报的权重,更强调即时奖励,加速学习过程。由目标函数可知,折扣率在0-1之间时,T越小则J越优,即智能体会学习到一个尽量快地走到终点的策略。
- 限制轨迹长度: 智能体会存在n个能够走出迷宫的轨迹(原地徘徊、来回绕路……),若考虑限制每个轨迹的长度,则可防止智能体无限地试验,更有可能学到直接走出迷宫的策略。
- 设置更复杂的奖励结构:尝试在迷宫中的每走一步都给予负奖励-1,在成功走出迷宫时给予大的正奖励100,以鼓励智能体更快地找到走出迷宫的策略。
- 使用深度强化学习:例如深度 Q 网络(DQN)或者深度确定性策略梯度(DDPG),这些方法通常可以更好地处理复杂的状态空间和动作空间,提高学习的效率。
相关文章:
【深度学习】强化学习(三)强化学习的目标函数
文章目录 一、强化学习问题1、交互的对象2、强化学习的基本要素3、策略(Policy)4、马尔可夫决策过程5、强化学习的目标函数1. 总回报(Return)2. 折扣回报(Discounted Return)a. 折扣率b. 折扣回报的定义 3.…...
)
Python高级算法——人工神经网络(Artificial Neural Network)
Python中的人工神经网络(Artificial Neural Network):深入学习与实践 人工神经网络是一种模拟生物神经网络结构和功能的计算模型,近年来在机器学习和深度学习领域取得了巨大成功。本文将深入讲解Python中的人工神经网络ÿ…...
深入理解JVM设计的精髓与独特之处
这是Java代码的执行过程 从软件工程的视角去深入拆解,无疑极具吸引力:首个阶段仅依赖于源高级语言的细微之处,而第二阶段则仅仅专注于目标机器语言的特质。 不可否认,在这两个编译阶段之间的衔接(具体指明中间处理步…...

fastjson序列化与反序列化的忽略
一.场景 做了一个基于springbootfastjson的小应用。A对象与B对象是OneToMany关系。A对象新增时也希望一起传递B的信息到后台进行Many端数据的新增。直接使用A对象来接收前台传递的信息,springboot会帮我们组装好对象。查询A对象时,又不希望其中的List<…...
【TB作品】基于单片机的实验室管理系统,STM32,GM65二维码扫描模块
硬件: (1)STM32F103C8T6最小板() (2)GM65二维码扫描模块 (3)DS1302实时时钟模块 (4)AT24C02 存储设备 (5)蜂鸣器 …...

超过 1450 个 pfSense 服务器因错误链而遭受 RCE 攻击
在线暴露的大约 1450 个 pfSense 实例容易受到命令注入和跨站点脚本漏洞的攻击,这些漏洞如果链接起来,可能使攻击者能够在设备上执行远程代码。 pfSense 是一款流行的开源防火墙和路由器软件,允许广泛的定制和部署灵活性。 它是一种经济高效…...

react面试总结2
redux中sages和thunk中间件的区别,优缺点 Redux 中的 redux-saga 和 redux-thunk 都是中间件,用于处理异步操作,但它们有一些区别。 Redux Thunk: 简单易用:redux-thunk 是比较简单直观的中间件,它允许 …...

hive 常见存储格式和应用场景
1.存储格式 textfile、sequencefile、orc、parquet sequencefile很少使用(不介绍了),常见的主要就是orc 和 parquet 建表声明语句是:stored as textfile/orc/parquet行存储:同一条数据的不同字段都在相邻位置ÿ…...

PyPDF2库对PDF实现读取的应用
目录 一、PyPDF2 库的使用 1. 文档打开和页面读取 2. 文本提取功能 3. 示例代码...
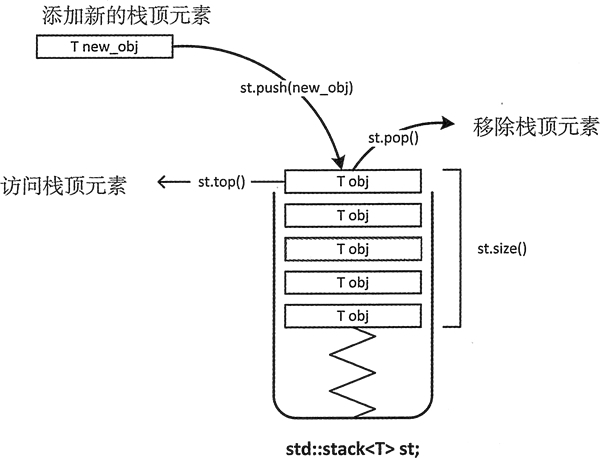
C++ stack用法详解
stack 栈适配器是一种单端开口的容器(如图 1 所示),实际上该容器模拟的就是栈存储结构,即无论是向里存数据还是从中取数据,都只能从这一个开口实现操作。 图 1 stack 适配器示意图 如图 1 所示,stack 适配器…...
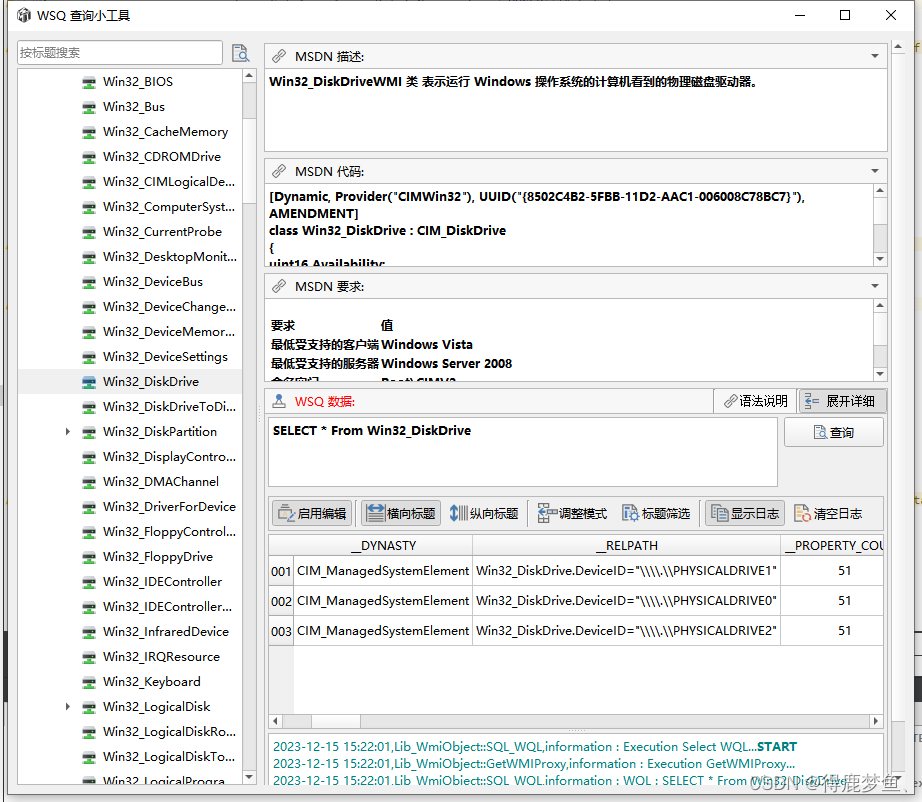
QT案例 使用WMI获取win_32类的属性值,包括Win32提供程序类中的属性
最近涉及到读取WINDOWS 系统电脑设备的各种信息,在一些特殊的PE或者简化系统中是没有WMI查询工具的,所以就自己写了个查询大部分WMI属性值的工具,免去了查网站的功夫。涉及到的方法内容就汇总做个总结。 PS:因为工作中软件基本都是我一个人开…...

TCP/UDP 的特点、区别及优缺点
1.TCP协议 传输控制协议(TCP,Transmission Control Protocol)是一种面向连接的、可靠的、基于字节流的传输层通信协议。TCP协议通过建立连接、数据确认(编段号和确认号)和数据重传等机制,保证了数据的可靠性…...
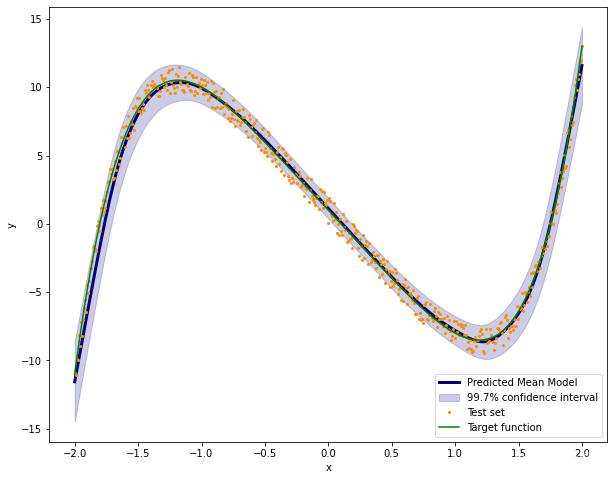
使用 Python 使用贝叶斯神经网络从理论到实践
一、说明 在本文中,我们了解了如何构建一个机器学习模型,该模型结合了神经网络的强大功能,并且仍然保持概率方法进行预测。为了做到这一点,我们可以构建所谓的贝叶斯神经网络。 这个想法不是优化神经网络的损失࿰…...

Linux 中的网站服务管理
目录 1.安装服务 2.启动服务 3.停止服务 4.重启服务 5.开机自启 6.案例 1.安装服务 网址服务程序 yum insatll httpd -y 查看所有服务 systemctl list-unit-files 2.启动服务 systemctl start httpd 查看服务进程,确认是否启动 ps -ef|grep httpd 3.停止…...
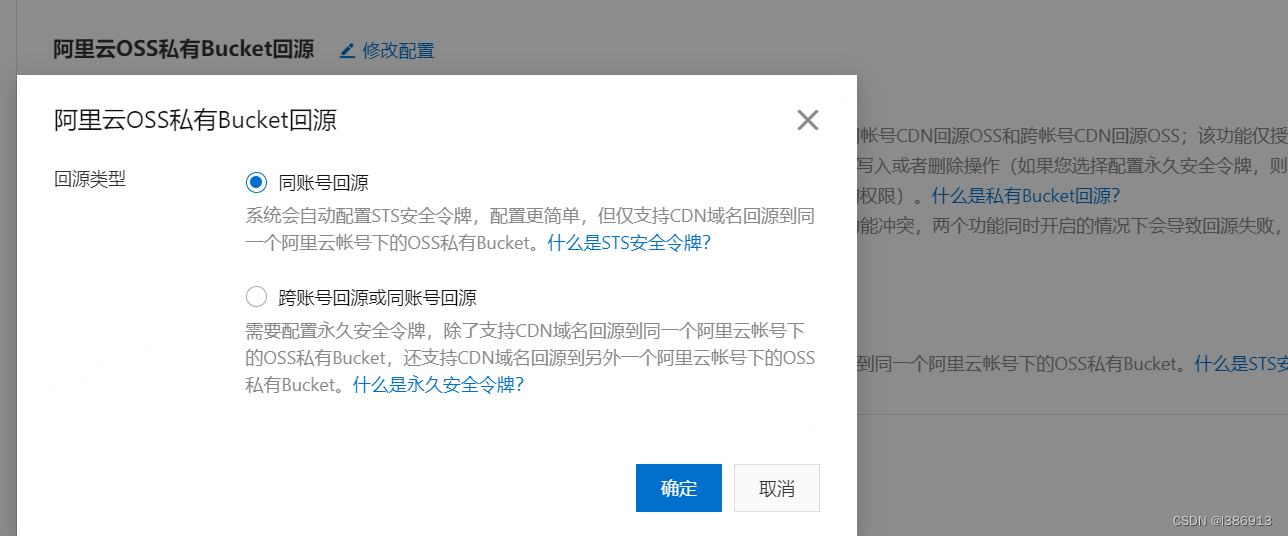
阿里云cdn设置相同的域名路径访问不同的oss目录
1.设置回源配置,添加回源URL改写 2.设置跨域,cdn的跨域优先oss 3.回源设置...
工程中提示词的开发优化基础概念学习总结)
提示(Prompt)工程中提示词的开发优化基础概念学习总结
本文对学习过程进行总结,仅对基本思路进行说明,结果在不同的模型上会有差异。 提示与提示工程 提示:指的是向大语言模型输入的特定短语或文本,用于引导模型产生特定的输出,以便模型能够生成符合用户需求的回应。 提示…...

C#基础——语法学习
C#的基本语法 在介绍基本语法之前我们先来大概讲一下创建好的这些文件都是做什么的 .sln文件:将项目和解决方案项结合到一起 .vs文件夹:用来存储当前解决方案中关于用户的设置和自定义项,比如断点,主题等。(一般都将其…...
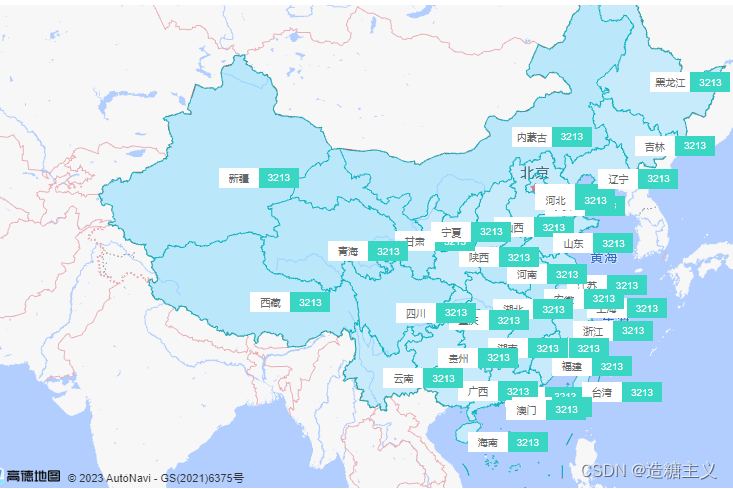
vue-实现高德地图-省级行政区地块显示+悬浮显示+标签显示
<template><div><div id"container" /><div click"showFn">显示</div><div click"removeFn">移除</div></div> </template><script> import AMapLoader from amap/amap-jsapi-load…...

flutter ‘Gradle Libs‘ was added by build file ‘app/build.gradle‘
相关问题解释文章 How to prefer settings.gradle repositories over build.gradle repositoriesMode 解释 问题描述 此问题是,直接创建的flutter项目,需要配置其他的maven仓库地址,和第三方module,结果始终都是无法成功 错误…...

Java中的链式编程风格与应用案例
引言 链式编程是一种在编程中经常使用的风格,它可以使代码更加简洁、易读和易于维护。在Java中,链式编程可以通过方法链的方式来实现。本文将介绍Java中的链式编程风格,并通过几个应用案例来说明其实际应用。 一、链式编程的概念与特点 链式…...
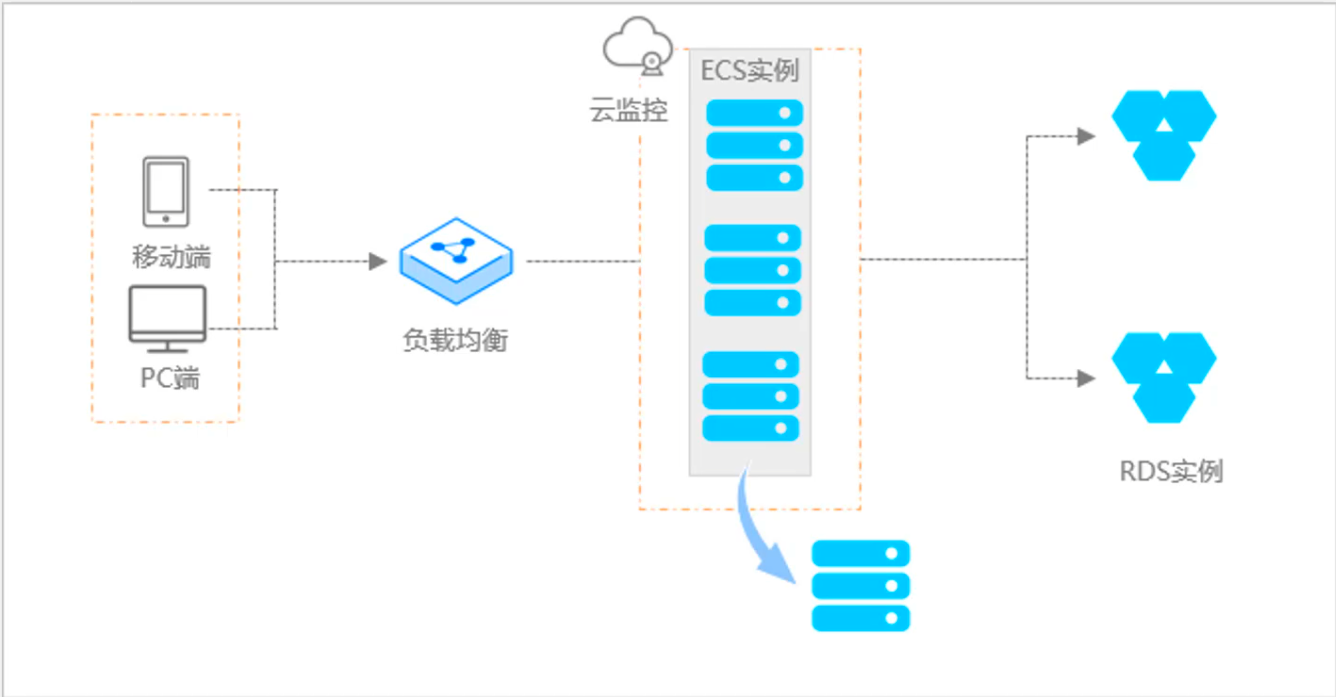
阿里云ACP云计算备考笔记 (5)——弹性伸缩
目录 第一章 概述 第二章 弹性伸缩简介 1、弹性伸缩 2、垂直伸缩 3、优势 4、应用场景 ① 无规律的业务量波动 ② 有规律的业务量波动 ③ 无明显业务量波动 ④ 混合型业务 ⑤ 消息通知 ⑥ 生命周期挂钩 ⑦ 自定义方式 ⑧ 滚的升级 5、使用限制 第三章 主要定义 …...
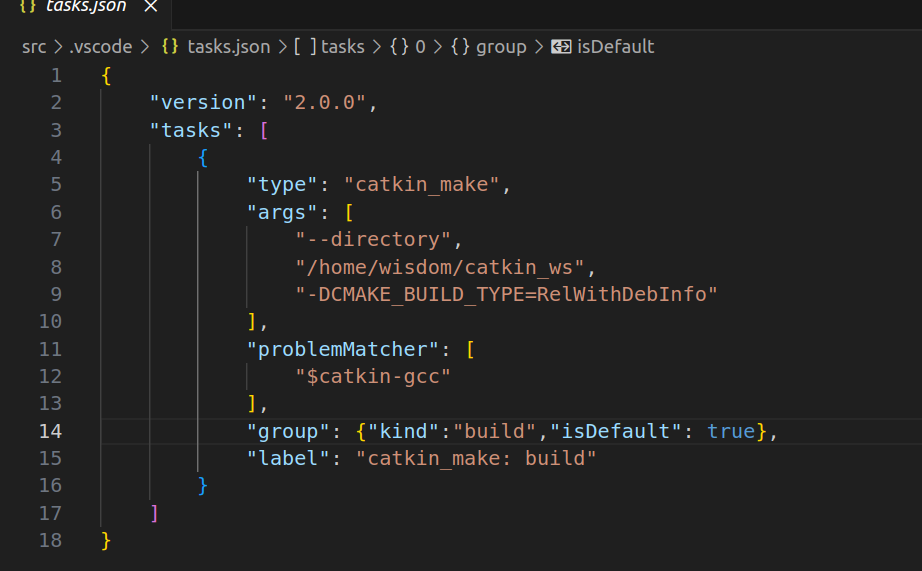
1.3 VSCode安装与环境配置
进入网址Visual Studio Code - Code Editing. Redefined下载.deb文件,然后打开终端,进入下载文件夹,键入命令 sudo dpkg -i code_1.100.3-1748872405_amd64.deb 在终端键入命令code即启动vscode 需要安装插件列表 1.Chinese简化 2.ros …...

【论文笔记】若干矿井粉尘检测算法概述
总的来说,传统机器学习、传统机器学习与深度学习的结合、LSTM等算法所需要的数据集来源于矿井传感器测量的粉尘浓度,通过建立回归模型来预测未来矿井的粉尘浓度。传统机器学习算法性能易受数据中极端值的影响。YOLO等计算机视觉算法所需要的数据集来源于…...

unix/linux,sudo,其发展历程详细时间线、由来、历史背景
sudo 的诞生和演化,本身就是一部 Unix/Linux 系统管理哲学变迁的微缩史。来,让我们拨开时间的迷雾,一同探寻 sudo 那波澜壮阔(也颇为实用主义)的发展历程。 历史背景:su的时代与困境 ( 20 世纪 70 年代 - 80 年代初) 在 sudo 出现之前,Unix 系统管理员和需要特权操作的…...

今日科技热点速览
🔥 今日科技热点速览 🎮 任天堂Switch 2 正式发售 任天堂新一代游戏主机 Switch 2 今日正式上线发售,主打更强图形性能与沉浸式体验,支持多模态交互,受到全球玩家热捧 。 🤖 人工智能持续突破 DeepSeek-R1&…...

华为云Flexus+DeepSeek征文|DeepSeek-V3/R1 商用服务开通全流程与本地部署搭建
华为云FlexusDeepSeek征文|DeepSeek-V3/R1 商用服务开通全流程与本地部署搭建 前言 如今大模型其性能出色,华为云 ModelArts Studio_MaaS大模型即服务平台华为云内置了大模型,能助力我们轻松驾驭 DeepSeek-V3/R1,本文中将分享如何…...
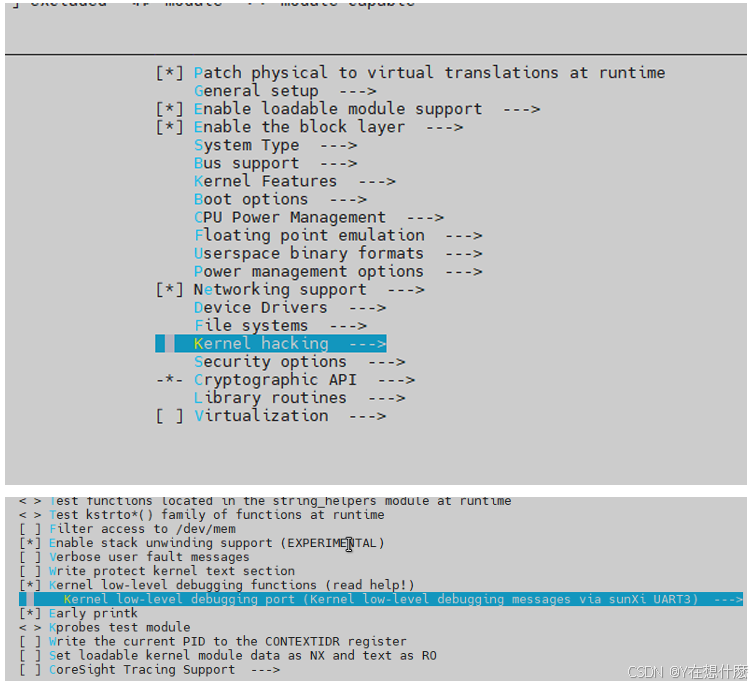
全志A40i android7.1 调试信息打印串口由uart0改为uart3
一,概述 1. 目的 将调试信息打印串口由uart0改为uart3。 2. 版本信息 Uboot版本:2014.07; Kernel版本:Linux-3.10; 二,Uboot 1. sys_config.fex改动 使能uart3(TX:PH00 RX:PH01),并让boo…...

CMake控制VS2022项目文件分组
我们可以通过 CMake 控制源文件的组织结构,使它们在 VS 解决方案资源管理器中以“组”(Filter)的形式进行分类展示。 🎯 目标 通过 CMake 脚本将 .cpp、.h 等源文件分组显示在 Visual Studio 2022 的解决方案资源管理器中。 ✅ 支持的方法汇总(共4种) 方法描述是否推荐…...
JVM虚拟机:内存结构、垃圾回收、性能优化
1、JVM虚拟机的简介 Java 虚拟机(Java Virtual Machine 简称:JVM)是运行所有 Java 程序的抽象计算机,是 Java 语言的运行环境,实现了 Java 程序的跨平台特性。JVM 屏蔽了与具体操作系统平台相关的信息,使得 Java 程序只需生成在 JVM 上运行的目标代码(字节码),就可以…...

作为测试我们应该关注redis哪些方面
1、功能测试 数据结构操作:验证字符串、列表、哈希、集合和有序的基本操作是否正确 持久化:测试aof和aof持久化机制,确保数据在开启后正确恢复。 事务:检查事务的原子性和回滚机制。 发布订阅:确保消息正确传递。 2、性…...