最新Unity DOTS Physics物理引擎碰撞事件处理
最近DOTS发布了正式的版本,同时基于DOTS的理念实现了一套高性能的物理引擎,今天我们给大家分享和介绍一下这个物理引擎的碰撞事件处理以及核心相关概念。
Unity.Physics物理引擎的主要流程与Pipeline
Unity.Physics物理引擎做仿真迭代计算的时候主要通过以下步骤来执行:
step1: 从entity里面的ECS组件中获取我们当前的物体的状态数据;
step2: 做粗略的broadphase计算阶段,遍历物理世界里面所有的body, 通过AABB包围计算,来快速的判断哪些物体,可能相交;粗略计算,把不会相交的排除掉, 不会相交的就不会改变运动状态;
step3: narrowphase阶段: 把可能相交的物体,做进一步的精确的计算;根据他们的物理形状,计算出来准确的碰撞点与相关的碰撞信息;
step4: 基于这些碰撞信息, 我们的物理引擎会计算具体的碰撞信息,关节,摩檫力,阻力等计算, 结合物理的原理,计算出来我们的物理刚体的速度,角速度等运动状态。
Step5: 根据基于全新的运动状态,把所有运动的物体,向前迭代计算(线性速度,角速度,摩擦力等),计算出这帧新的刚体的位置等信息;
Step6: Unity Physic 通过 ExportPhysicsWorld System 把物理刚体的位置速度等,同步给节点Entity的LocalTransform组件与PhysicVelocity等组件,这样渲染的entity,就会跟着物理引擎的刚体同步移动;
对啦!这里有个游戏开发交流小组里面聚集了一帮热爱学习游戏的零基础小白,也有一些正在从事游戏开发的技术大佬,欢迎你来交流学习。
DOTS中基于System与SystemGroup 树行结构来决定DOTS中的迭代顺序,这个是DOTS中很重要的一个概念。Unity Physics将上面步骤与逻辑基于ECS设计思想,分别设计了相关的System与System Group,结构如下:
-->FixedStepSimulationSystemGroup:
-->PhysicsSystemGroup
-->PhysicsInitializeGroup(System Group)
-->PhysicsSimulationGroup(SystemGroup)
-->PhysicsCreateBodyPairsGroup
-->PhysicsCreateContactsGroup
-->PhysicsCreateJacobiansGroup
-->PhysicsSolveAndIntegrateGroup
-->System: ExportPhysicsWorld
所有物理引擎的迭代计算都是基于FixedStepSimulationSystemGroup,即按照固定的时间间隔来迭代物理仿真,保持物理引擎的一致性与稳定性。所有的物理引擎的仿真计算都放在PysicsSystemGroup下。PysicsSystemGroup包含PhysicsInitializeGroup ,PhysicsSimulationGroup 与一个ExportPhysicsWorld System。上面提到的Step1,在PhysicsInitializeGroup阶段完成, step2~step5在PhysicsSimulationGroup中完成, PhysicsSimulationGroup完成后物理引擎的一帧的迭代计算完成,最后通过ExportPhysicsWorld的System把把物理引擎的内部数据同步到Entity的PhysicsVelocity, LocalTransform等ECS组件。在PhysicsSimulationGroup又有4个subgroup,他们分别对应step2~step5的执行步骤。
Unity Physics碰撞检测事件处理
当PhysicsSimulationGroup的分组执行完成以后,就完成了整个物理引擎的仿真与迭代计算。仿真过程中会产生一个PhysicsWorld,物理世界里面的所有的刚体等相关物理数据(位置,速度等)都可以通过PhysicsWorld得到,最后还被导出到Entity的ECS组件里面。在物理仿真中所有的事件都会被保存到Simulation对象中,这些事件包括了我们常见的碰撞事件与触发器事件。传统模式下我们是通过回调函数来处理的,DOTS模式下我们是在一个System环节内统一来处理这些事件。物理引擎的碰撞与触发事件处理流程如下:
Step1: 编写一个System处理逻辑,来处理物理事件;
Step2: 指定好System执行的时机,一定要在PhysicsSimulationGroup之前或者之后,这样才能拿到碰撞事件的数据;
Step3: 通过编写Job,来遍历当前所有发生的碰撞事件,然后编写每个碰撞事件的处理逻辑;
Step4: 获取存储事件的Simulation单例,传递给job来进行具体执行;
碰撞事件的处理:
当所有的模拟迭代计算完成后,会把过程中的所有碰撞事件对存放到Simulation对象中,我们可以通过(SystemBase|SystemAPI|EntityQuery).GetSingleton<SimulationSingleton>().AsSimulation()获取Simulation对象。
要处理所有的碰撞事件,我们先编写一个System用来编写事件处理逻辑,然后编写一个Job,继承自IcollisionEventsJob,这样就可以在Job中遍历所有的碰撞事件,每个碰撞事件都调用Job的Execute函数,在它里面来处理每个碰撞事件的逻辑。代码如下:
[UpdateInGroup(typeof(FixedStepSimulationSystemGroup))]
[UpdateBefore(typeof(PhysicsSimulationGroup))] // We are updating before `PhysicsSimulationGroup` - this means that we will get the events of the previous frame
public partial struct GetNumCollisionEventsSystem : ISystem
{[BurstCompile]public partial struct CountNumCollisionEvents : ICollisionEventsJob{public NativeReference<int> NumCollisionEvents;public void Execute(CollisionEvent collisionEvent){NumCollisionEvents.Value++;}}[BurstCompile]public void OnUpdate(ref SystemState state){NativeReference<int> numCollisionEvents = new NativeReference<int>(0, Allocator.TempJob);state.Dependency = new CountNumCollisionEvents{NumCollisionEvents = numCollisionEvents}.Schedule(SystemAPI.GetSingleton<SimulationSingleton>());// ...}
}触发器事件TriggerEvent处理:
触发器事件与碰撞事件类似,我们只要编写一个ItriggerEventsJob就可以遍历当前所有的触发器事件了,代码如下:
[UpdateInGroup(typeof(FixedStepSimulationSystemGroup))]
[UpdateAfter(typeof(PhysicsSimulationGroup))] // We are updating after `PhysicsSimulationGroup` - this means that we will get the events of the current frame.
public partial struct GetNumTriggerEventsSystem : ISystem
{[BurstCompile]public partial struct CountNumTriggerEvents : ITriggerEventsJob{public NativeReference<int> NumTriggerEvents;public void Execute(TriggerEvent collisionEvent){NumTriggerEvents.Value++;}}[BurstCompile]public void OnUpdate(ref SystemState state){NativeReference<int> numTriggerEvents = new NativeReference<int>(0, Allocator.TempJob);state.Dependency = new CountNumTriggerEvents{NumTriggerEvents = numTriggerEvents}.Schedule(SystemAPI.GetSingleton<SimulationSingleton>());// ...}
}今天的分享就到这里,需要本篇文章完整的项目工具与源码的同学可以关注我们
视频教程如下
Unity:DOTS专区www.bycwedu.com/promotion_channels/1830504531编辑
相关文章:

最新Unity DOTS Physics物理引擎碰撞事件处理
最近DOTS发布了正式的版本,同时基于DOTS的理念实现了一套高性能的物理引擎,今天我们给大家分享和介绍一下这个物理引擎的碰撞事件处理以及核心相关概念。 Unity.Physics物理引擎的主要流程与Pipeline Unity.Physics物理引擎做仿真迭代计算的时候主要通过以下步骤来…...

springboot集成websocket全全全!!!
一、界面展示 二、前置了解 1.什么是websocket WebSocket是一种在单个TCP连接上进行全双工通信的持久化协议。 全双工协议就是客户端可以给我们服务器发数据 服务器也可以主动给客户端发数据。 2.为什么有了http协议 还要websocket 协议 http协议是一种无状态,非…...

SpringMVC:整合 SSM 中篇
文章目录 SpringMVC - 04整合 SSM 中篇一、优化二、总结三、说明注意: SpringMVC - 04 整合 SSM 中篇 一、优化 在 spring-dao.xml 中配置 dao 接口扫描,可以动态地实现 dao 接口注入到 Spring 容器中。 优化前:手动创建 SqlSessionTempl…...
oracle即时客户端(Instant Client)安装与配置
之前的文章记录了oracle客户端和服务端的下载与安装,内容参见: 在Windows中安装Oracle_windows安装oracle 如果不想安装oracle客户端(或者是电脑因为某些原因无法安装oracle客户端),还想能够连接oracle远程服务&#…...

POP3协议详解
基本介绍 POP3是一种用于从邮件服务器获取电子邮件的协议。它允许邮件客户端连接到邮件服务器,检索服务器上存储的邮件,并将邮件下载到客户端设备上。POP3的工作原理如下: 连接和身份验证: 邮件客户端通过TCP/IP连接到邮件服务器…...
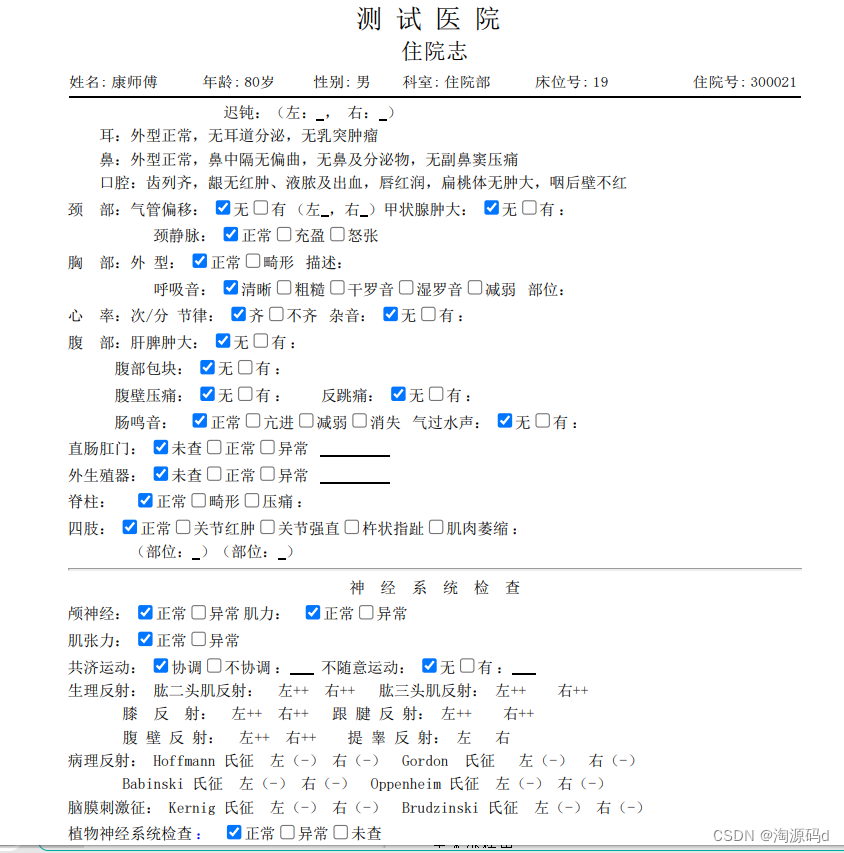
电子病历编辑器源码,提供电子病历在线制作、管理和使用的一体化电子病历解决方案
概述: 电子病历是指医务人员在医疗活动过程中,使用医疗机构信息系统生成的文字、符号、图表、图形、数据、影像等数字化信息,并能实现存储、管理、传输和重现的医疗记录,是病历的一种记录形式。 医院通过电子病历以电子化方式记录患者就诊的信息,包括&…...
WT2605C高品质音频蓝牙语音芯片:外接功放实现双声道DAC输出的优势
在音频处理领域,双声道DAC输出能够提供更为清晰、逼真的音效,增强用户的听觉体验。针对这一需求,唯创知音的WT2605C高品质音频蓝牙语音芯片,通过外接功放实现双声道DAC输出,展现出独特的应用优势。 一、高品质音频处理…...

IntelliJ IDEA 2023.3 最新版如何如何配置?IntelliJ IDEA 2023.3 最新版试用方法
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
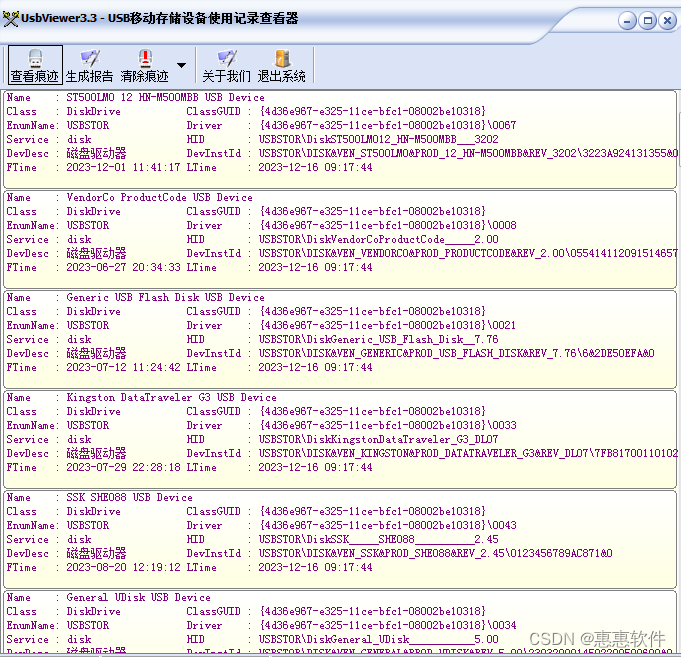
如何查看内存卡使用记录-查看的设备有:U盘、移动硬盘、MP3、SD卡等-供大家学习研究参考
主要功能 USB Viewer(USB移动存储设备使用记录查看器)可用于查看本机的USB移动存储设备使用记录。可查看的设备有:U盘、移动硬盘、MP3、SD卡……等。 可用于兵器、航空、航天、政府、军队等对保密要求较高的单位,可在计算机保…...
九、W5100S/W5500+RP2040之MicroPython开发<HTTPOneNET示例>
文章目录 1. 前言2. 平台操作流程2.1 创建设备2.2 创建数据流模板 3. WIZnet以太网芯片4. 示例讲解以及使用4.1 程序流程图4.2 测试准备4.3 连接方式4.4 相关代码4.5 烧录验证 5. 注意事项6. 相关链接 1. 前言 在这个智能硬件和物联网时代,MicroPython和树莓派PICO正…...

在 Laravel 中,清空缓存大全
在 Laravel 中,清空缓存通常涉及到清除应用程序中的缓存文件和数据库查询缓存。以下是一些常用的清空缓存方法: 1. 清除路由缓存: Laravel 的路由缓存可以提高应用程序的性能,但在开发过程中,你可能需要频繁地更改路…...

【贪心】单源最短路径Python实现
文章目录 [toc]问题描述Dijkstra算法Dijkstra算法的正确性贪心选择性质最优子结构性质 Dijkstra算法应用示例时间复杂性Python实现 个人主页:丷从心 系列专栏:贪心算法 问题描述 给定一个带权有向图 G ( V , E ) G (V , E) G(V,E),其中每…...

Spark Shell的简单使用
简介 Spark shell是一个特别适合快速开发Spark原型程序的工具,可以帮助我们熟悉Scala语言。即使你对Scala不熟悉,仍然可以使用这个工具。Spark shell使得用户可以和Spark集群交互,提交查询,这便于调试,也便于初学者使用…...

Springsecurty【2】认证连接MySQL
1.前期准备 基于Spring Initializr创建SpringBoot项目(基于SpringBoot 2.7.12版本),实现与MyBatisPlus的项目整合。分别导入:CodeGenerator和MyBatisPlusConfig。 CodeGenerator:用于MybatisPlus代码生成;…...
.Net 访问电子邮箱-LumiSoft.Net,好用
序言: 网上找了很多关于.Net如何访问电子邮箱的方法,但是大多数都达不到想要的需求,只有一些 收发邮件。因此 花了很大功夫去看 LumiSoft.Net.dll 的源码,总算做出自己想要的结果了,果然学习诗人进步。 介绍ÿ…...

谷粒商城-商品服务-新增商品功能开发(商品图片无法展示问题没有解决)
在网关配置路由 - id: member_routeuri: lb://gulimemberpredicates:- Path/api/gulimember/**filters:- RewritePath/api/(?<segment>.*),/$\{segment}并将所有逆向生成的工程调式出来 获取分类关联的品牌 例如:手机(分类)-> 品…...
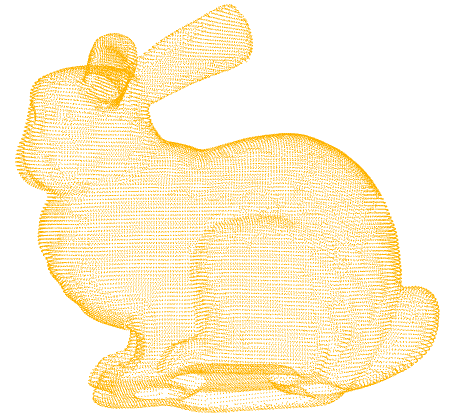
Open3D 点云数据处理基础(Python版)
Open3D 点云数据处理基础(Python版) 文章目录 1 概述 2 安装 2.1 PyCharm 与 Python 安装 2.3 Anaconda 安装 2.4 Open3D 0.13.0 安装 2.5 新建一个 Python 项目 3 点云读写 4 点云可视化 2.1 可视化单个点云 2.2 同一窗口可视化多个点云 2.3…...

使用vue-qr,报错in ./node_modules/vue-qr/dist/vue-qr.js
找到node_modules—>vue-qr/dist/vue-qr.js文件,搜…e,将…去掉,然后重新运行项目。...

百川2大模型微调问题解决
之前用https://github.com/FlagAlpha/Llama2-Chinese微调过几个模型,总体来说llama2的生态还是比较好的,过程很顺利。微调百川2就没那么顺利了,所以简单做个记录 1. 数据准备,我的数据是单轮对话,之前微调llama2已经按…...
MySQL的事务-原子性
MySQL的事务处理具有ACID的特性,即原子性(Atomicity)、一致性(Consistency)、隔离性(Isolation)和持久性(Durability)。 1. 原子性指的是事务中所有操作都是原子性的,要…...

Docker 离线安装指南
参考文章 1、确认操作系统类型及内核版本 Docker依赖于Linux内核的一些特性,不同版本的Docker对内核版本有不同要求。例如,Docker 17.06及之后的版本通常需要Linux内核3.10及以上版本,Docker17.09及更高版本对应Linux内核4.9.x及更高版本。…...

PHP和Node.js哪个更爽?
先说结论,rust完胜。 php:laravel,swoole,webman,最开始在苏宁的时候写了几年php,当时觉得php真的是世界上最好的语言,因为当初活在舒适圈里,不愿意跳出来,就好比当初活在…...

DockerHub与私有镜像仓库在容器化中的应用与管理
哈喽,大家好,我是左手python! Docker Hub的应用与管理 Docker Hub的基本概念与使用方法 Docker Hub是Docker官方提供的一个公共镜像仓库,用户可以在其中找到各种操作系统、软件和应用的镜像。开发者可以通过Docker Hub轻松获取所…...

linux 错误码总结
1,错误码的概念与作用 在Linux系统中,错误码是系统调用或库函数在执行失败时返回的特定数值,用于指示具体的错误类型。这些错误码通过全局变量errno来存储和传递,errno由操作系统维护,保存最近一次发生的错误信息。值得注意的是,errno的值在每次系统调用或函数调用失败时…...

Nginx server_name 配置说明
Nginx 是一个高性能的反向代理和负载均衡服务器,其核心配置之一是 server 块中的 server_name 指令。server_name 决定了 Nginx 如何根据客户端请求的 Host 头匹配对应的虚拟主机(Virtual Host)。 1. 简介 Nginx 使用 server_name 指令来确定…...

TRS收益互换:跨境资本流动的金融创新工具与系统化解决方案
一、TRS收益互换的本质与业务逻辑 (一)概念解析 TRS(Total Return Swap)收益互换是一种金融衍生工具,指交易双方约定在未来一定期限内,基于特定资产或指数的表现进行现金流交换的协议。其核心特征包括&am…...

uniapp中使用aixos 报错
问题: 在uniapp中使用aixos,运行后报如下错误: AxiosError: There is no suitable adapter to dispatch the request since : - adapter xhr is not supported by the environment - adapter http is not available in the build 解决方案&…...
Springboot社区养老保险系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,社区养老保险系统小程序被用户普遍使用,为方…...
C++使用 new 来创建动态数组
问题: 不能使用变量定义数组大小 原因: 这是因为数组在内存中是连续存储的,编译器需要在编译阶段就确定数组的大小,以便正确地分配内存空间。如果允许使用变量来定义数组的大小,那么编译器就无法在编译时确定数组的大…...
免费PDF转图片工具
免费PDF转图片工具 一款简单易用的PDF转图片工具,可以将PDF文件快速转换为高质量PNG图片。无需安装复杂的软件,也不需要在线上传文件,保护您的隐私。 工具截图 主要特点 🚀 快速转换:本地转换,无需等待上…...