Transformer架构和对照代码详解
1、英文架构图
下面图中展示了Transformer的英文架构,英文架构中的模块名称和具体代码一一对应,方便大家对照代码、理解和使用。

2、编码器
2.1 编码器介绍
从宏观⻆度来看,Transformer的编码器是由多个相同的层叠加⽽ 成的,每个层都有两个⼦层(⼦层表⽰为sublayer)。第⼀个⼦层是多头⾃注意⼒(multi-head self-attention) 汇聚;第⼆个⼦层是基于位置的前馈⽹络(positionwise feed-forward network)。
具体来说,在计算编码器 的⾃注意⼒时,查询、键和值都来⾃前⼀个编码器层的输出。受 7.6节中残差⽹络的启发,每个⼦层都采⽤了残差连接(residual connection)。在Transformer中,对于序列中任何位置的任何输⼊x ∈ R d,都要求满 ⾜sublayer(x) ∈ R d,以便残差连接满⾜x + sublayer(x) ∈ R d。在残差连接的加法计算之后,紧接着应⽤层 规范化(layer normalization)。因此,输⼊序列对应的每个位置,Transformer编码器都将输出⼀个d维表⽰向量。
2.2 编码器中各模块的实现
2.2.1 Positionwise FNN实现(对照架构图中的Positionwise FNN组件)
基于位置的前馈⽹络(Positionwise FNN)对序列中的所有位置的表⽰进⾏变换时使⽤的是同⼀个多层感知机(MLP),这就是称前馈⽹络是基于位置的(positionwise)的原因。在下⾯的实现中,输⼊X的形状(批量⼤⼩,时间步数或序列 ⻓度,隐单元数或特征维度)将被⼀个两层的感知机转换成形状为(批量⼤⼩,时间步数,ffn_num_outputs) 的输出张量。
代码:
#@save
class PositionWiseFFN(nn.Module):
"""基于位置的前馈⽹络"""def __init__(self, ffn_num_input, ffn_num_hiddens, ffn_num_outputs,**kwargs):super(PositionWiseFFN, self).__init__(**kwargs)self.dense1 = nn.Linear(ffn_num_input, ffn_num_hiddens)self.relu = nn.ReLU()self.dense2 = nn.Linear(ffn_num_hiddens, ffn_num_outputs)def forward(self, X):return self.dense2(self.relu(self.dense1(X)))代码解释:
这段代码是用PyTorch框架定义的一个类 PositionWiseFFN,它是一个基于位置的前馈神经网络(Position-wise Feed-Forward Network),通常用于Transformer架构中。此类实现了一个简单的两层全连接神经网络,每一层后接ReLU激活函数。代码解释:类定义:class PositionWiseFFN(nn.Module):"""基于位置的前馈⽹络"""
这里定义了一个名为 PositionWiseFFN 的类,该类继承自 PyTorch 中的 nn.Module 类,这是构建神经网络模块的基础类。初始化方法 __init__:def __init__(self, ffn_num_input, ffn_num_hiddens, ffn_num_outputs, **kwargs):super(PositionWiseFFN, self).__init__(**kwargs)self.dense1 = nn.Linear(ffn_num_input, ffn_num_hiddens)self.relu = nn.ReLU()self.dense2 = nn.Linear(ffn_num_hiddens, ffn_num_outputs)
初始化时,通过 super().__init__(**kwargs) 调用了父类 nn.Module 的初始化方法。
定义了两个线性层(全连接层):self.dense1 和 self.dense2。dense1 输入维度为 ffn_num_input,输出维度为 ffn_num_hiddens;dense2 输入维度与隐藏层输出维度相同,即 ffn_num_hiddens,输出维度为 ffn_num_outputs。
同时定义了一个ReLU激活函数 self.relu,在前馈过程中将被应用在线性层之间。前向传播方法 forward:def forward(self, X):return self.dense2(self.relu(self.dense1(X)))
在这个方法中,定义了输入数据 X 经过模型的处理流程。首先,X 通过第一个线性层 self.dense1 计算输出。
然后,对线性层的输出应用ReLU激活函数 self.relu 进行非线性变换。
最后,将ReLU激活后的结果送入第二个线性层 self.dense2 进行计算,得到最终的输出。
总结来说,这个类实现了 Transformer 中的一个基本单元——位置感知前馈神经网络,其结构为:输入 -> Linear -> ReLU -> Linear -> 输出。这个模块应用于每个位置上的输入特征上,独立地进行计算并增加非线性表达能力。2.2.2 Add & norm组件的实现
现在我们关注架构图中的加法和规范化(Add & norm)组件。正如在本节开头所述,这是由残差连接和紧随其后的层规范化组成的。两者都是构建有效的深度架构的关键。
层规范化和批量规范化:后续将解释在⼀个⼩批量的样本内基于批量规范化对数据进⾏重新中⼼化和重新缩放的调整。层规范化和批量规范化的⽬标相同,但层规范化是基于特征维度进⾏规范化。尽管批量规范化在计算机视觉中被⼴泛 应⽤,但在⾃然语⾔处理任务中(输⼊通常是变⻓序列)批量规范化通常不如层规范化的效果好。
现在可以使⽤残差连接和层规范化来实现AddNorm类。暂退法也被作为正则化⽅法使⽤。
代码:
class AddNorm(nn.Module):
"""残差连接后进⾏层规范化"""def __init__(self, normalized_shape, dropout, **kwargs):super(AddNorm, self).__init__(**kwargs)self.dropout = nn.Dropout(dropout)self.ln = nn.LayerNorm(normalized_shape)def forward(self, X, Y):return self.ln(self.dropout(Y) + X)代码解释:
这段代码定义了一个名为 AddNorm 的类,该类继承自 PyTorch 中的 nn.Module 类。这个类在Transformer架构中实现了一个残差连接(Residual Connection)与层规范化(Layer Normalization)相结合的模块。代码解释:类定义:
python
class AddNorm(nn.Module):"""残差连接后进行层规范化"""
这个类表示一个神经网络模块,其功能是在执行层规范化操作之前先进行残差连接。
初始化方法 __init__:
python
def __init__(self, normalized_shape, dropout, **kwargs):super(AddNorm, self).__init__(**kwargs)self.dropout = nn.Dropout(dropout)self.ln = nn.LayerNorm(normalized_shape)
初始化时,调用父类 nn.Module 的初始化方法。
定义了一个 dropout 层,使用了给定的 dropout 参数来控制随机失活的比例。
创建了一个 nn.LayerNorm 对象,用于对指定维度大小(normalized_shape)的数据进行层规范化处理。
前向传播方法 forward:
python
def forward(self, X, Y):return self.ln(self.dropout(Y) + X)
在 forward 方法中,模型接收两个输入变量 X 和 Y。
先将输入 Y 通过 dropout 层,以一定概率丢弃部分激活值,从而增加模型的泛化能力。
将经过 dropout 操作后的 Y 与原始输入 X 相加,实现残差连接,允许信息直接从上一层传递到下一层。
最后,将相加的结果送入 self.ln 即 Layer Normalization 层进行规范化处理,确保每一层的输出具有稳定的分布,有利于梯度传播和训练过程。
所以,整个 AddNorm 模块的作用是首先对输入 Y 进行可能的随机失活,然后将其与另一个输入 X 做残差连接,并对结果应用层规范化,这是Transformer模型中常见的结构之一。2.2.3 Multi-head attention组件的实现
在实践中,当给定相同的查询、键和值的集合时,我们希望模型可以基于相同的注意⼒机制学习到不同的⾏ 为,然后将不同的⾏为作为知识组合起来,捕获序列内各种范围的依赖关系(例如,短距离依赖和⻓距离依 赖关系)。因此,允许注意⼒机制组合使⽤查询、键和值的不同⼦空间表⽰(representation subspaces可能是有益的。
为此,与其只使⽤单独⼀个注意⼒汇聚,我们可以⽤独⽴学习得到的h组不同的 线性投影(linear projections) 来变换查询、键和值。然后,这h组变换后的查询、键和值将并⾏地送到注意⼒汇聚中。最后,将这h个注意 ⼒汇聚的输出拼接在⼀起,并且通过另⼀个可以学习的线性投影进⾏变换,以产⽣最终输出。这种设计被称 为多头注意⼒(multihead attention)。对于h个注意⼒汇聚输出,每⼀个注意⼒汇聚都 被称作⼀个头(head)。下图 展⽰了使⽤全连接层来实现可学习的线性变换的多头注意⼒。
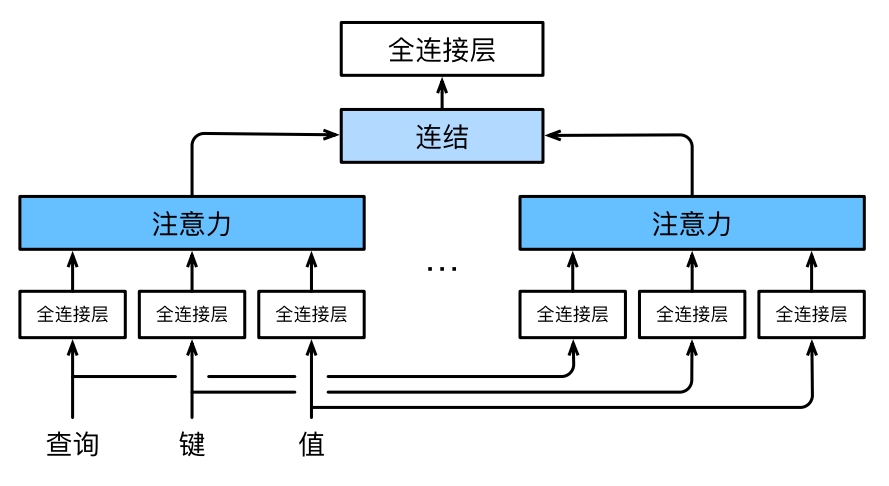
图 多头注意⼒:多个头连结后做线性变换
模型:
在实现过程中通常选择缩放点积注意⼒作为每⼀个注意⼒头。为了避免计算代价和参数代价的⼤幅增⻓,我 们设定。值得注意的是,如果将查询、键和值的线性变换的输出数量设置为
,则可以并⾏计算
个头。在下⾯的实现中,
是通过参数num_hiddens指定的。
代码:
#@save
class MultiHeadAttention(nn.Module):
"""多头注意⼒"""def __init__(self, key_size, query_size, value_size, num_hiddens,num_heads, dropout, bias=False, **kwargs):super(MultiHeadAttention, self).__init__(**kwargs)self.num_heads = num_headsself.attention = d2l.DotProductAttention(dropout)self.W_q = nn.Linear(query_size, num_hiddens, bias=bias)self.W_k = nn.Linear(key_size, num_hiddens, bias=bias)self.W_v = nn.Linear(value_size, num_hiddens, bias=bias)self.W_o = nn.Linear(num_hiddens, num_hiddens, bias=bias)def forward(self, queries, keys, values, valid_lens):# queries,keys,values的形状:# (batch_size,查询或者“键-值”对的个数,num_hiddens)# valid_lens 的形状:# (batch_size,)或(batch_size,查询的个数)# 经过变换后,输出的queries,keys,values 的形状:# (batch_size*num_heads,查询或者“键-值”对的个数,# num_hiddens/num_heads)queries = transpose_qkv(self.W_q(queries), self.num_heads)keys = transpose_qkv(self.W_k(keys), self.num_heads)values = transpose_qkv(self.W_v(values), self.num_heads)if valid_lens is not None:# 在轴0,将第⼀项(标量或者⽮量)复制num_heads次,# 然后如此复制第⼆项,然后诸如此类。valid_lens = torch.repeat_interleave(valid_lens, repeats=self.num_heads, dim=0)# output的形状:(batch_size*num_heads,查询的个数,# num_hiddens/num_heads)output = self.attention(queries, keys, values, valid_lens)# output_concat的形状:(batch_size,查询的个数,num_hiddens)output_concat = transpose_output(output, self.num_heads)return self.W_o(output_concat)代码详细解释:
代码定义了一个名为MultiHeadAttention的类,它是实现Transformer中多头注意力机制的核心模块。这个类基于PyTorch框架构建,并且遵循了Dive into Deep Learning (d2l) 一书中的实现风格。以下是对代码逐段详细解释:类定义与初始化:继承自nn.Module,这是PyTorch中所有神经网络模块的基础类。初始化函数__init__接收多个参数:key_size, query_size, value_size: 分别是键、查询和值向量的维度。
num_hiddens: 每个注意力头内部的隐藏层维度(每个头的输入和输出维度)。
num_heads: 多头注意力的头数。
dropout: 注意力机制中的 dropout 率,用于防止过拟合。
bias: 可选布尔值,决定线性变换层是否使用偏置项。
定义内部属性:self.num_heads:保存注意力头的数量。
self.attention:实例化一个d2l.DotProductAttention对象,这是一个点积注意力子模块,包含了缩放点积注意力计算以及可能的dropout操作。
self.W_q, self.W_k, self.W_v:分别对应三个线性层,将查询、键、值映射到隐藏层维度(即num_hiddens)。
self.W_o:最后一个线性层,将从多头注意力得到的结果转换回原始的num_hiddens维度。
forward方法:输入包括queries, keys, values,它们通常是从编码器或解码器的不同位置获取的特征向量,形状为 (batch_size, query_or_key_value_pairs_num, num_hiddens);valid_lens 是序列的有效长度,对于变长序列做掩码处理时有用,其形状可以是 (batch_size,) 或 (batch_size, query_num)。首先通过对应的线性层(self.W_q, self.W_k, self.W_v)将查询、键和值投影到新的空间,并通过transpose_qkv函数进行转置和重塑,使得形状变为 (batch_size*num_heads, query_or_key_value_pairs_num, num_hiddens/num_heads),这样就可以实现并行计算多个注意力头。如果传入了有效长度valid_lens,则会对其进行复制以匹配多个注意力头的数量。调用self.attention(点积注意力)来计算注意力得分并加权求和得到上下文向量,同时应用dropout和masking。通过transpose_output函数对结果进行反向转置和重塑,合并来自所有注意力头的输出,恢复成单个注意力头的形状(batch_size, query_num, num_hiddens)。最后,将整合后的注意力输出通过线性层self.W_o进一步映射到最终的输出维度。总之,这段代码实现了多头注意力机制,它能够并行地执行多个注意力头的计算,并将各个头的输出融合在一起,从而增强了模型捕捉不同表示子空间中信息的能力。2.3 编码器的整体实现
2.3.1 EncoderBlock
有了组成Transformer编码器的基础组件,现在可以先实现编码器中的⼀个层。下⾯EncoderBlock类包含 两个⼦层:多头⾃注意⼒和基于位置的前馈⽹络,这两个⼦层都使⽤了残差连接和紧随的层规范化。
代码:
class EncoderBlock(nn.Module):
"""Transformer编码器块"""def __init__(self, key_size, query_size, value_size, num_hiddens,norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,dropout, use_bias=False, **kwargs):super(EncoderBlock, self).__init__(**kwargs)self.attention = d2l.MultiHeadAttention(key_size, query_size, value_size, num_hiddens, num_heads, dropout,use_bias)self.addnorm1 = AddNorm(norm_shape, dropout)self.ffn = PositionWiseFFN(ffn_num_input, ffn_num_hiddens, num_hiddens)self.addnorm2 = AddNorm(norm_shape, dropout)def forward(self, X, valid_lens):Y = self.addnorm1(X, self.attention(X, X, X, valid_lens))return self.addnorm2(Y, self.ffn(Y))代码解释:
这段代码定义了一个名为EncoderBlock的类,它是Transformer模型中的编码器部分的基本组成单元,即一个编码块。这个类继承自PyTorch的nn.Module基类,并在初始化函数中构建了两个主要组成部分:多头注意力机制(Multi-Head Attention)和前馈神经网络(Position-wise Feed-Forward Network, FFN)。同时,该类还包含了两个用于添加残差连接(Add)与层归一化(Norm)的子模块。初始化方法 __init__:接收多个参数,如关键尺寸(key_size)、查询尺寸(query_size)、值尺寸(value_size)、隐藏层大小(num_hiddens)、层归一化的形状(norm_shape)、FFN输入维度(ffn_num_input)、FFN隐藏层维度(ffn_num_hiddens)、注意力头的数量(num_heads)、dropout率等。
定义内部属性:
attention: 使用d2l库中的MultiHeadAttention类创建一个多头注意力子模块,其参数由传入的关键、查询、值尺寸以及隐藏层大小、注意力头数量和dropout率确定。
addnorm1 和 addnorm2: 分别是两次残差连接后接层归一化的组合模块,这里使用的是自定义的AddNorm类,它包含加法操作(Add)和层归一化(Norm),并接收norm_shape和dropout作为参数。
ffn: 创建一个位置感知的前馈神经网络子模块,利用PositionWiseFFN类实现,其参数包括FFN的输入维度、隐藏层维度和输出维度(此处与隐藏层大小相同)。
正向传播方法 forward:输入参数为X(编码器的输入序列)和valid_lens(有效序列长度)。
首先,将X传递给attention子模块计算多头注意力结果,并通过addnorm1模块进行残差连接和层归一化,得到中间表示Y。
最后,将经过注意力机制处理后的Y传递给ffn子模块进行前馈神经网络计算,再通过addnorm2模块进行第二次残差连接和层归一化,从而得到最终的编码块输出。
综上所述,EncoderBlock类实现了Transformer编码器的一个完整基本块,包括多头注意力机制和前馈神经网络结构,并结合了残差连接和层归一化来优化训练过程和提高模型性能。2.3.2 TransformerEncoder
实现的Transformer编码器的代码中,堆叠了num_layers个EncoderBlock类的实例。由于这⾥使⽤的是 值范围在−1和1之间的固定位置编码,因此通过学习得到的输⼊的嵌⼊表⽰的值需要先乘以嵌⼊维度的平⽅ 根进⾏重新缩放,然后再与位置编码相加。
代码:
class TransformerEncoder(d2l.Encoder):
"""Transformer编码器"""def __init__(self, vocab_size, key_size, query_size, value_size,num_hiddens, norm_shape, ffn_num_input, ffn_num_hiddens,num_heads, num_layers, dropout, use_bias=False, **kwargs):super(TransformerEncoder, self).__init__(**kwargs)self.num_hiddens = num_hiddensself.embedding = nn.Embedding(vocab_size, num_hiddens)self.pos_encoding = d2l.PositionalEncoding(num_hiddens, dropout)self.blks = nn.Sequential()for i in range(num_layers):self.blks.add_module("block"+str(i),EncoderBlock(key_size, query_size, value_size, num_hiddens,norm_shape, ffn_num_input, ffn_num_hiddens,num_heads, dropout, use_bias))def forward(self, X, valid_lens, *args):# 因为位置编码值在-1和1之间,# 因此嵌⼊值乘以嵌⼊维度的平⽅根进⾏缩放,# 然后再与位置编码相加。X = self.pos_encoding(self.embedding(X) * math.sqrt(self.num_hiddens))self.attention_weights = [None] * len(self.blks)for i, blk in enumerate(self.blks):X = blk(X, valid_lens)self.attention_weights[i] = blk.attention.attention.attention_weightsreturn X代码解释:
这段代码定义了一个名为TransformerEncoder的类,它是基于深度学习框架实现的一个Transformer模型的编码器部分。这个类继承自d2l库中的Encoder基类,并在初始化和前向传播过程中实现了以下功能:初始化方法 __init__:接收一系列参数,包括词汇表大小(vocab_size)、关键尺寸(key_size)、查询尺寸(query_size)、值尺寸(value_size)、隐藏层大小(num_hiddens)、归一化形状(norm_shape)、FFN输入维度(ffn_num_input)、FFN隐藏层维度(ffn_num_hiddens)、注意力头数量(num_heads)、编码器层数量(num_layers)以及dropout率等。
创建一个词嵌入层:使用nn.Embedding来将输入的词索引映射到隐藏向量空间。
创建一个位置编码层:通过d2l.PositionalEncoding类为输入序列添加位置信息,以帮助模型理解序列中元素的位置关系。
构建编码器块:利用循环结构创建指定数量(num_layers)的EncoderBlock实例,并将其串联成一个序列,存储在self.blks属性中。
正向传播方法 forward:输入参数为X(输入序列的词索引),valid_lens(有效序列长度列表,用于处理变长序列时的掩码操作)以及其他可能的额外参数。
首先,对输入序列进行词嵌入操作并应用位置编码。这里乘以math.sqrt(self.num_hiddens)是为了确保在加入位置编码后,数值范围保持合理,同时避免了因维度增大而导致的梯度消失或爆炸问题。
然后,遍历所有的编码器块,对每个编码块执行前向传播计算,并将当前块的注意力权重保存在self.attention_weights列表中,便于后续可视化或分析。
最终返回经过所有编码块处理后的输出表示X。
总结起来,TransformerEncoder类构建了一个完整的Transformer编码器结构,它包含了词嵌入、位置编码以及多层由多头注意力机制和前馈神经网络组成的编码块,在处理输入序列时能够捕获上下文依赖和位置信息。3、解码器
Transformer解码器也是由多个相同的层组成。每个层都是用DecoderBlock实现的。
在DecoderBlock(解码器模块)类中,实现的每个层,包含三个子层:解码器自注意力(decoder attention)、编码器-解码器注意力(encoder-decoder attention)和基于位置的前馈网络(PositionWiseFFN)。这些子层也都被残差连接和紧随的层规范化围绕。
在掩蔽多头解码器自注意力层(第一个子层,decoder attention)中,查询、键和值都来自上一个解码器层的输出。
序列到序列模型,在训练阶段,其输出序列的所有位置(时间步)的词元都是已知的;然而,在预测阶段,其输出序列的词元是逐个生成的。在解码器的任何时间步中,只有生成的词元才能用于解码器的自注意力计算中。
为了在解码器中保留自回归的属性,其掩蔽自注意力设定了参数dec_valid_lens,以便任何查询都只会与解码器中所有已生成词元位置(即知道该查询位置为止)进行注意力计算。
补充解释:什么是自回归属性?
自回归属性(Autoregressive Property)是指在统计模型或机器学习模型中,当前状态或者输出值能够通过之前一个或多个时间步长的状态或输出值的线性组合来预测的特性。在时间序列分析和序列生成任务中,这种属性尤为重要。
具体到机器学习领域,例如在自然语言处理(NLP)中的Transformer架构中,解码器部分就体现了自回归属性。在生成文本时,解码器在预测下一个单词时只能依赖于已知的、先前生成的单词序列,而不能“偷看”未来还未生成的部分。这意味着模型是按照从左到右的顺序逐个生成序列元素,每个新生成的元素都基于历史生成的信息。
数学上,自回归模型通常表示为AR(p)模型,其中p代表模型考虑过去p个时间点上的数据来进行当前时刻预测的程度:

代码:
class DecoderBlock(nn.Module):
"""解码器中第i个块"""def __init__(self, key_size, query_size, value_size, num_hiddens,norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,dropout, i, **kwargs):super(DecoderBlock, self).__init__(**kwargs)self.i = iself.attention1 = d2l.MultiHeadAttention(key_size, query_size, value_size, num_hiddens, num_heads, dropout)self.addnorm1 = AddNorm(norm_shape, dropout)self.attention2 = d2l.MultiHeadAttention(key_size, query_size, value_size, num_hiddens, num_heads, dropout)self.addnorm2 = AddNorm(norm_shape, dropout)self.ffn = PositionWiseFFN(ffn_num_input, ffn_num_hiddens,num_hiddens)self.addnorm3 = AddNorm(norm_shape, dropout)def forward(self, X, state):enc_outputs, enc_valid_lens = state[0], state[1]# 训练阶段,输出序列的所有词元都在同⼀时间处理,# 因此state[2][self.i]初始化为None。# 预测阶段,输出序列是通过词元⼀个接着⼀个解码的,# 因此state[2][self.i]包含着直到当前时间步第i个块解码的输出表⽰if state[2][self.i] is None:key_values = Xelse:key_values = torch.cat((state[2][self.i], X), axis=1)state[2][self.i] = key_valuesif self.training:batch_size, num_steps, _ = X.shape# dec_valid_lens的开头:(batch_size,num_steps),# 其中每⼀⾏是[1,2,...,num_steps]dec_valid_lens = torch.arange(1, num_steps+1,device=X.device).repeat(batch_size, 1)else:dec_valid_lens = None# ⾃注意⼒X2 = self.attention1(X, key_values, key_values, dec_valid_lens)Y = self.addnorm1(X, X2)# 编码器-解码器注意⼒。# enc_outputs的开头:(batch_size,num_steps,num_hiddens)Y2 = self.attention2(Y, enc_outputs, enc_outputs, enc_valid_lens)Z = self.addnorm2(Y, Y2)return self.addnorm3(Z, self.ffn(Z)), state
代码解释:
这段代码定义了一个名为DecoderBlock的类,它继承自PyTorch的nn.Module类,用于构建Transformer解码器中的一个基本块。这个类主要包含两个多头注意力机制和一个位置感知前馈神经网络(Position-wise Feed-Forward Network, PFFN),以及相应的归一化和残差连接层。参数说明:key_size: 表示在多头注意力机制中键向量(Key)的维度。
query_size: 表示查询向量(Query)的维度,在解码过程中通常是与键向量相同的维度。
value_size: 表示值向量(Value)的维度,同样通常与键向量相同。
num_hiddens: 指隐藏层神经元的数量,也是自注意力和编码器-解码器注意力输出的特征维度。
norm_shape: 用于设置Layer Normalization层输入形状的参数,可能是一个元组表示通道数和序列长度。
ffn_num_input: 前馈神经网络(Position-wise FFN)的第一个全连接层的输入维度,通常与num_hiddens相同。
ffn_num_hiddens: 前馈神经网络中间层神经元的数量,即隐藏层大小。
num_heads: 多头注意力中并行工作的注意力头的数量。
dropout: 在训练过程中使用的随机失活率,以防止过拟合。
i: 这个解码块在解码器堆叠结构中的索引编号,有助于区分不同的解码块状态。
类初始化时做的事情:使用super().__init__(**kwargs)调用父类nn.Module的初始化方法,并传递其他可变关键字参数。将传入的i赋给实例变量self.i,用于记录该解码块在解码器层级中的位置。初始化两个d2l.MultiHeadAttention对象,分别对应于自注意力机制(decoder自身的上下文依赖)和编码器-解码器注意力机制(利用编码器信息)。它们都使用了相同的参数配置,包括key_size, query_size, value_size, num_hiddens, num_heads和dropout。初始化两个AddNorm层,分别用于将上述两个注意力机制的输出与原始输入进行残差连接和层归一化处理。初始化一个PositionWiseFFN对象,代表位置感知前馈神经网络,其输入、中间层和输出维度分别为ffn_num_input, ffn_num_hiddens, num_hiddens。最后,初始化第三个AddNorm层,用于对前馈神经网络的输出执行残差连接和层归一化操作。forward(...)方法:输入X为当前解码器的输入,state是一个包含编码器输出、有效长度以及其他中间结果的状态元组。在训练阶段和预测阶段处理方式有所不同。在训练时,一次性处理整个输出序列;而在预测阶段,逐词解码,因此需要保存中间解码状态。对于自注意力子层,根据state[2][self.i]是否为None来决定key_values,即合并当前解码块之前的输出与当前输入。计算自注意力输出X2,并经过AddNorm得到Y。使用编码器-解码器注意力机制计算Y2,同样通过AddNorm得到Z。最后,将Z传递给前馈神经网络,并再次通过AddNorm层与原始Z相加,得到最终的输出。方法返回更新后的输出以及整个解码过程中的状态。我们构建由num_layers个DecoderBlock实例组成的完整的Transformer解码器。最后,通过⼀个全连 接层计算所有vocab_size个可能的输出词元的预测值。解码器的⾃注意⼒权重和编码器解码器注意⼒权重都 被存储下来,⽅便⽇后可视化的需要。
代码:
class TransformerDecoder(d2l.AttentionDecoder):def __init__(self, vocab_size, key_size, query_size, value_size,num_hiddens, norm_shape, ffn_num_input, ffn_num_hiddens,num_heads, num_layers, dropout, **kwargs):super(TransformerDecoder, self).__init__(**kwargs)self.num_hiddens = num_hiddensself.num_layers = num_layersself.embedding = nn.Embedding(vocab_size, num_hiddens)self.pos_encoding = d2l.PositionalEncoding(num_hiddens, dropout)self.blks = nn.Sequential()for i in range(num_layers):self.blks.add_module("block"+str(i),DecoderBlock(key_size, query_size, value_size, num_hiddens,norm_shape, ffn_num_input, ffn_num_hiddens,num_heads, dropout, i))self.dense = nn.Linear(num_hiddens, vocab_size)def init_state(self, enc_outputs, enc_valid_lens, *args):return [enc_outputs, enc_valid_lens, [None] * self.num_layers]def forward(self, X, state):X = self.pos_encoding(self.embedding(X) * math.sqrt(self.num_hiddens))self._attention_weights = [[None] * len(self.blks) for _ in range (2)]for i, blk in enumerate(self.blks):X, state = blk(X, state)# 解码器⾃注意⼒权重self._attention_weights[0][i] = blk.attention1.attention.attention_weights# “编码器-解码器”⾃注意⼒权重self._attention_weights[1][i] = blk.attention2.attention.attention_weightsreturn self.dense(X), state@propertydef attention_weights(self):return self._attention_weights代码解释:
这段代码定义了一个名为TransformerDecoder的类,它继承自d2l.AttentionDecoder。这个类实现了Transformer模型中的解码器部分,用于序列生成任务,如机器翻译。初始化方法 __init__:接受一系列参数,包括词汇表大小(vocab_size)、注意力机制中关键、查询和值向量的维度、隐藏层大小(num_hiddens)、正则化层形状(norm_shape)、前馈神经网络输入与隐藏层单元数(ffn_num_input, ffn_num_hiddens)、注意力头数量(num_heads)、编码器层数量(num_layers)以及dropout率等。初始化词嵌入层(embedding layer),将输入的词索引映射到隐藏空间。初始化位置编码层(positional encoding),为输入序列添加位置信息。创建一个nn.Sequential容器,通过循环结构添加指定数量的DecoderBlock实例作为解码器块,这些块在构造时传入相应的参数,并通过i来区分不同的解码块。定义全连接层(dense layer),用于将最后的隐藏状态转换为词汇表大小的输出概率分布。init_state方法:初始化解码器的状态,返回一个包含编码器输出、有效长度列表以及一个所有解码块中间状态(默认为None)的列表。
forward方法:首先对输入序列进行词嵌入并加上位置编码,同时对嵌入结果进行缩放以保证数值稳定性。通过遍历所有的解码块执行前向传播计算,保存每个解码块的自注意力权重(decoder self-attention weights)和编码器-解码器注意力权重(encoder-decoder attention weights)。返回经过解码器处理后的最终输出和更新后的状态。属性 attention_weights:提供一个只读属性,用于获取整个解码过程中各个解码块的注意力权重。这里包含了两组注意力权重,一组是解码器内部各时间步之间的自注意力权重,另一组是编码器和当前解码时间步之间的注意力权重。这些权重可以用来可视化或分析模型关注的重点。相关文章:
Transformer架构和对照代码详解
1、英文架构图 下面图中展示了Transformer的英文架构,英文架构中的模块名称和具体代码一一对应,方便大家对照代码、理解和使用。 2、编码器 2.1 编码器介绍 从宏观⻆度来看,Transformer的编码器是由多个相同的层叠加⽽ 成的,每个…...

大数的乘法
题目描述 求两个不超过100位的非负整数的乘积。 输入 有两行,每行是一个不超过100位的非负整数,没有多余的前导0。 输出 一行,相乘后的结果。 样例输入 Copy 123456789 123456789样例输出 Copy 15241578750190521 代码实现࿱…...

年度征文 | 机器学习之心的2023
机器学习之心的2023 2023是极其复杂的一年。 生活上,养了很多宠物。 工作上,写了不少博客。 虽然遇见更多让人不开心的事情,但总体还是美好的。 愿大家新的一年健康平安,生活幸福! 机器学习是一项庞大的工程࿰…...

13.Kubernetes应用部署完整流程:从Dockerfile到Ingress发布完整流程
本文以一个简单的Go应用Demo来演示Kubernetes应用部署的完整流程 1、Dockerfile多阶段构建 Dockerfile多阶段构建 [root@docker github]# git clone https://gitee.com/yxydde/http-dump.git [root@docker github]# cd http-dump/ [root@docker http-dump]# cat Dockerfile …...

多年后再用TB,谈项目管理工具
背景 最近启动一个小项目,多年未曾使用项目管理工具,依稀记得使用过Basecamp,Tower,worktitle,teambition等等,当然还有mantis,vs project等等。于是随便翻阅找个用,不小心翻了TB的牌子,竟然已是阿里旗下的…...

Spark MLlib ----- ALS算法
补充 在谈ALS(Alternating Least Squares)之前首先来谈谈LS,即最小二乘法。LS算法是ALS的基础,是一种数优化技术,也是一种常用的机器学习算法,他通过最小化误差平方和寻找数据的最佳匹配,利用最小二乘法寻找最优的未知数据,保证求的数据与已知的数据误差最小。LS也被用…...
ubuntu桥接方式上网
vmvare:VMware Workstation 17 Pro ubuntu: Ubuntu 14.04.6 LTS window10 下面是我的电脑配置 下面是ubuntu虚拟机的配置 vi /etc/network/interfaces 下面的gateway就是window -ipconfig 截图里的默认网关 auto lo iface lo inet loopbackauto eth0 iface eth0 inet stat…...

收到的字符串写入xml并且将这个xml写入.zip文件中
文章目录 1、将数据写入xml文件WriteToXmlFile2、将xml文件写入zip压缩文件AddToZip3、组合起来4、使用到的头文件和动态库 1、将数据写入xml文件WriteToXmlFile void CSMSLoginDlg::WriteToXmlFile(const std::string& responseData, const std::string& xmlFileName…...

【读书笔记】《白帽子讲web安全》跨站脚本攻击
目录 前言: 第二篇 客户端脚本安全 第3章 跨站脚本攻击(XSS) 3.1XSS简介 3.2XSS攻击进阶 3.2.1初探XSS Payload 3.2.2强大的XSS Payload 3.2.2.1 构造GET与POST请求 3.2.2.2XSS钓鱼 3.2.2.3识别用户浏览器 3.2.2.4识别用户安装的软…...

第九节 初始化项目
系列文章目录 目录 系列文章目录 前言 操作方法 总结 前言 初始化项目,导入默认reset.scss 、variables.scss及mixins.scss等并修改main.js引入样式 操作方法 将默认样式表文件导入到项目。样式文件已经放到资源里请自行下载(...

【论文阅读】深度学习中的后门攻击综述
深度学习中的后门攻击综述 1.深度学习模型三种攻击范式1.1.对抗样本攻击1.2.数据投毒攻击1.3.后门攻击 2.后门攻击特点3.常用术语和标记4.常用评估指标5.攻击设置5.1.触发器5.1.1.触发器属性5.1.2.触发器类型5.1.3.攻击类型 5.2.目标类别5.3.训练方式 1.深度学习模型三种攻击范…...

Spring Boot中加@Async和不加@Async有什么区别?设置核心线程数、设置最大线程数、设置队列容量是什么意思?
在 Spring 中,Async 注解用于将方法标记为异步执行的方法。当使用 Async 注解时,该方法将在单独的线程中执行,而不会阻塞当前线程。这使得方法可以在后台执行,而不会影响主线程的执行。 在您提供的代码示例中,a1() 和…...

Vue_00001_CLI
初始化脚手架 初始化脚手架步骤: 第一步(仅第一次执行):全局安装vue/cli。 命令:npm install -g vue/cli 第二步:切换到要创建项目的目录,然后使用命令创建项目。 命令:vue creat…...
kubernetes ResourceQuotas Limits(资源配额)
开头语 写在前面:如有问题,以你为准, 目前24年应届生,各位大佬轻喷,部分资料与图片来自网络 内容较长,页面右上角目录方便跳转 简介 当多个用户或团队共享具有固定节点数目的集群时,人们会…...

【ARMv8架构系统安装PySide2】
ARMv8架构系统安装PySide2 Step1. 下载Qt资源包Step2. 配置和安装Qt5Step3. 检查Qt-5.15.2安装情况Step4. 安装PySide2所需的依赖库Step5. 下载和配置PySide2Step6. 检验PySide2是否安装成功 Step1. 下载Qt资源包 if you need the whole Qt5 (~900MB): wget http://master.qt…...

ECMAScript6详解
ECMAScript 6,也被称为 ES6 或 ECMAScript 2015,是 JavaScript 编程语言标准的一个主要更新。它于 2015 年正式发布,并带来了许多新特性和改进,使得 JavaScript 开发更加现代化和高效。下面是 ES6 的一些关键特性的详解࿱…...
[C#]使用PaddleInference图片旋转四种角度检测
官方框架地址】 https://github.com/PaddlePaddle/PaddleDetection.git 【算法介绍】 PaddleDetection 是一个基于 PaddlePaddle(飞桨)深度学习框架的开源目标检测工具库。它提供了一系列先进的目标检测算法,包括但不限于 Faster R-CNN, Ma…...

stable diffusion 基础教程-提示词之光的用法
基图 prompt: masterpiece,best quality,1girl,solo,looking at viewer,brown hair,hair between eyes,bangs,very long hair,red eyes,blush,bare shoulders,(white sundress),full body,Negative prompt: EasyNegative,badhandv4,nsfw,lowres,bad anatomy,bad hands,text…...
的实现)
第9课 回声抑制(AEC+AGC+ANS)的实现
在第8课中,我们将推流端与播放端合并实现了一对一音视频聊天功能,一切看起来还不错。但在实际使用时,会遇到一个烦心的问题:说话时会听到比较大的回声,影响正常使用。所以,这节课我们来重点解决这个问题。 …...

软件测试|Python中的变量与关键字详解
简介 在Python编程中,变量和关键字是非常重要的概念。它们是构建和控制程序的基本要素。本文将深入介绍Python中的变量和关键字,包括它们的定义、使用方法以及一些常见注意事项。 变量 变量的定义 变量是用于存储数据值的名称。在Python中࿰…...

OpenClaw Skills 全方位指南:从小白到高手的进阶之路
## 到底什么是 Skill? 简单来说,Skill 就是给 OpenClaw 里的 AI 智能体加装的“专业知识包”。 你可以把它看作是给 AI 准备的“特种兵训练手册”。它把某个领域的门道、干活的套路和趁手的工具全都打包在一起,让 AI 换上这个包就能立刻变成…...

智能卡拉OK系统:CCMusic实时音轨分析应用
智能卡拉OK系统:CCMusic实时音轨分析应用 1. 引言 想象一下这样的场景:你在KTV包房里尽情歌唱,唱完一首歌后,系统不仅给出了准确的评分,还详细分析了你的演唱风格——音准如何、情感表达是否到位、甚至指出了哪些段落…...

知识工程:重新定义AI时代程序员的核心价值
知识工程:重新定义AI时代程序员的核心价值 一、软件开发的本质从未是"写代码" 当 ChatGPT 能够根据一段描述生成完整的 Spring Boot 服务时,很多程序员感到恐慌。但这种恐慌本身,恰恰暴露了一个长期存在的认知误区:把&q…...

Python学习-面向对象基础1
Python学习-面向对象基础1面向对象的三大特性封装继承多态基础概念类与对象self关键字特殊方法面向对象的三大特性 面向对象:将数据的属性和操作数据的方法封装成 “对象”,以对象为基础完成各种操作;通过类来定义对象的模板,来提…...

黑丝空姐-造相Z-Turbo部署排错指南:解决403 Forbidden等网络问题
黑丝空姐-造相Z-Turbo部署排错指南:解决403 Forbidden等网络问题 最近在星图GPU平台上部署“黑丝空姐-造相Z-Turbo”这个AI图像生成镜像时,不少朋友都卡在了网络访问这一步。最常见的就是启动应用后,浏览器里弹出一个冷冰冰的“403 Forbidde…...

Z-Image-Turbo-辉夜巫女惊艳效果对比:同一提示词下不同采样器出图质量分析
Z-Image-Turbo-辉夜巫女惊艳效果对比:同一提示词下不同采样器出图质量分析 1. 模型介绍 Z-Image-Turbo-辉夜巫女是基于Z-Image-Turbo模型的Lora版本,专门针对生成"辉夜巫女"风格图片进行了优化。这个模型通过Xinference部署为文生图服务&…...

Linux用户与组管理及文件权限配置详解
Linux用户与组管理用户(user) 每个使用Linux系统的个体或进程都需要一个用户账户,系统资源访问的最小权限单元。root用户:UID0,拥有最高权限 系统用户:UID 1-999(通常用于服务进程) …...

C++STL容器实战指南:从底层原理到高效应用
1. 为什么你需要深入理解STL容器? 我刚接触C时,总觉得STL容器就是个黑盒子——知道怎么用就行,何必管它里面怎么实现。直到有次面试被问到"vector扩容时会发生什么",我支支吾吾答不上来,才意识到理解底层原理…...

RTL8720硬件RTC中断库:高确定性时间触发方案
1. 项目概述RTL8720_RTC 是一款专为 Realtek RTL8720 系列 SoC(包括 RTL8720DN、RTL8722DM、RTL8722CSM)设计的高可靠性实时时钟(RTC)Arduino 封装库。该库并非简单封装 HAL 层 RTC 寄存器操作,而是围绕 RTL8720 片上 …...

【仿真建模-anylogic】FlowchartBlock实战应用与性能优化
1. FlowchartBlock基础入门:从零开始掌握核心功能 第一次接触AnyLogic的FlowchartBlock时,我完全被它强大的流程控制能力震撼到了。这个看似简单的模块,实际上是构建复杂仿真模型的基础组件。简单来说,FlowchartBlock就像是一个智…...