【正点原子】STM32电机应用控制学习笔记——8.FOC简介
FOC是适用于无刷电机的,而像有刷电机,舵机,步进电机是不适用FOC的。FOC是电机应用控制难度最大的部分了。
一.FOC简介(了解)
1.介绍
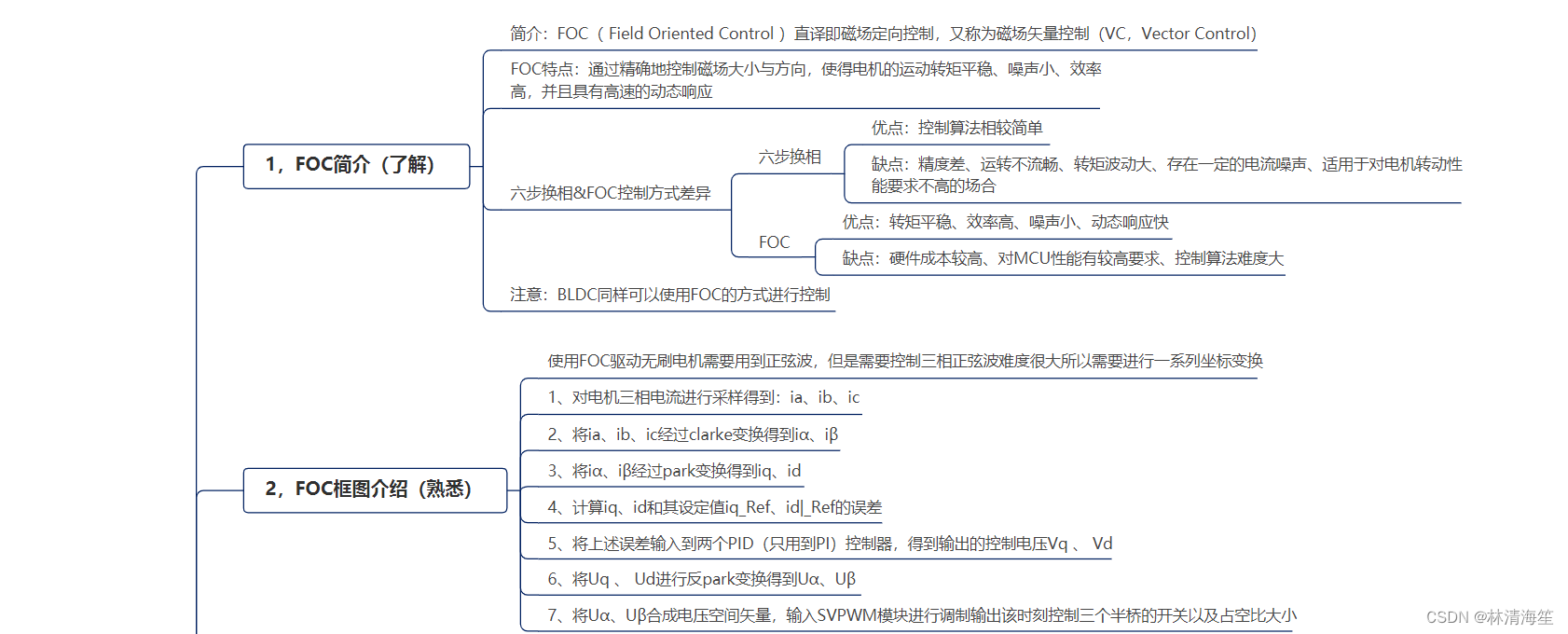
FOC(Filed Oriented Control)即磁场定向控制,又称磁场矢量控制(VC,Vector Control),也就是控制磁场的方向以及大小。
无刷电机的无感控制是六步换向,设定初始电流方向为u进入v流出,此时合成的磁场矢量方向是斜向下的,也就是吸引转子转动到这个位置,所以控制磁场也就是控制电机的转子。
FOC也是控制磁场,但是两者是有区别的。FOC有一个很明显的特点是精确,它可以非常精确的控制磁场的大小和方向,它可以使电机运转的转矩非常的平稳,噪声小,效率高,而且具有非常好的告诉动态响应。
六步换向是两两导通的一种方式,所以同一个时刻只有两项是导通的,绿色为电流流动方向,红色为合成的矢量方向,它是一段一段的位移的,走一圈全部运动了六段,一段走的是60度的角度。所以这个角度还是非常大的,在一些高精度的场合中,六步换向很显然是不行的,一点都不精确,像机械臂这些要求精度较高的,像素级别的精度,是不适用的。
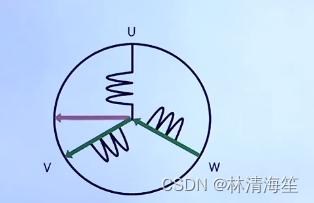
而FOC是三相同时导通的,每一项都是由导通的,只不过它分配的电流是有区别的,它就可以控制磁场的大小不变,实现360度无死角的旋转,这也是FOC和六步换向最大的区别了。

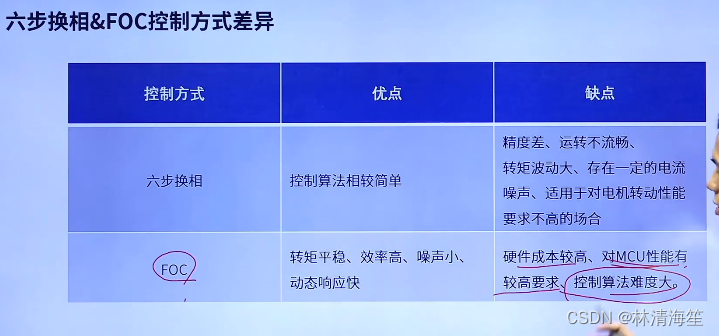
2.六步换向&FOC控制方式异同
首先六步换相的算法相对更加简单,但是缺点也非常明显,就是精度差,运转不流畅。所以无刷电机是没有位置环的,每一个位移都是60度或30度这么一个大角度,所以做位置环意义不大。且运转不流畅,因为是一段一段的移动,转矩的波动比较大,存在一定的电流噪声,适用于对电机转动性能要求不要的场合。
FOC优点非常明显,转矩平稳,效率高,噪声小,动态响应快,精度也非常大。但缺点就是硬件成本高,像FOC通常是使用PMSM无刷电机的,永磁同步电机的价格比较高,而且对MCU性能成本要求会更高。因为FOC涉及到数学物理学这方面的知识,算法难度会更大,所以控制算法的难度很大。
BLDC也是可以同样使用FOC的方式进行控制的,但是内部结构更适用六步换向。像FOC通常是用正弦波控制的,像BLDC通常用梯形波来控制的。PMSM电机在旋转的时候,去测量它的反电动势,是正弦波变化的。

二.FOC框图介绍(熟悉)
1.框图总体介绍
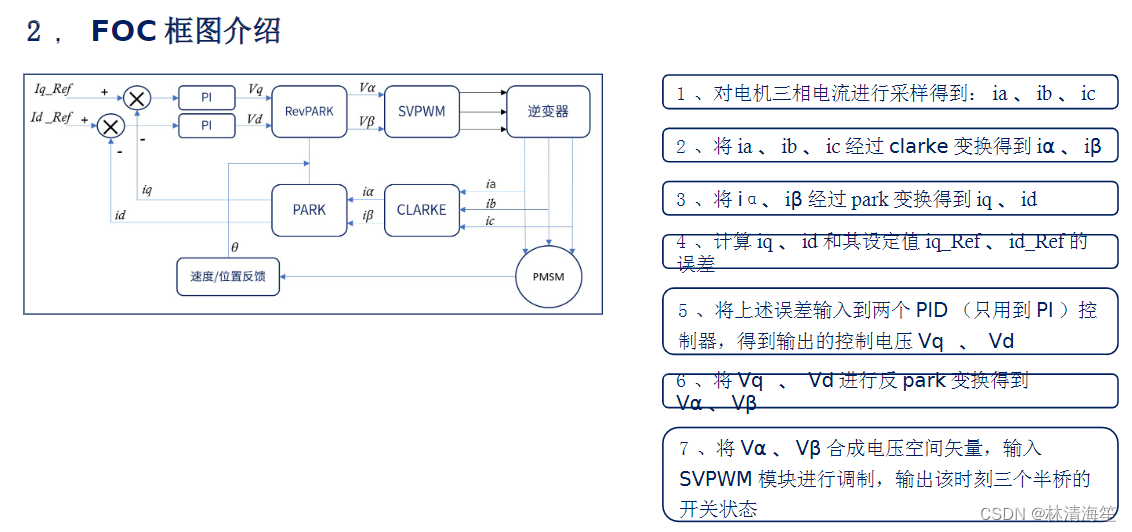
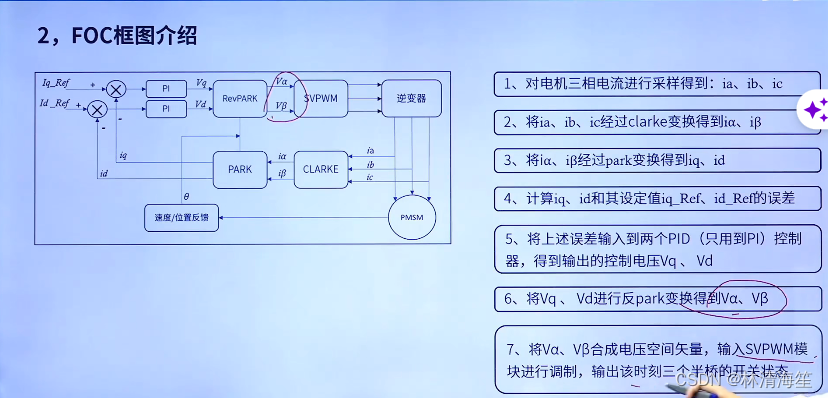
FOC整体的框图如下,在这里只用到PI运算。还是用了逆变器,也就是三相逆变电路,也就是通过三个半桥来控制电机。
总体过程:首先第一步是对电机的三相电流进行采样,就可以得到ia,ib,ic。采样之后经过CLARKE变换,就会得到iα和iβ。然后经过PARK变换,就会编程iq和id了。但同时还需要位置反馈,就是霍尔传感器,位置编码器这些来反馈转子的旋转角度。接着iq和id来到pi控制器了,这些设定值的误差来到PID控制器(只用到PI)算出期望值控制电压值Vq和Vd。接着进行反PARK运算,就能得到Vα和Vβ。接着就把它们输入到SVPWM模块中进行调制,输出控制三个半桥的开关状态,也就是六个开关。这样我们就可以控制PMSM或者BLDC了。
2.框图细分介绍
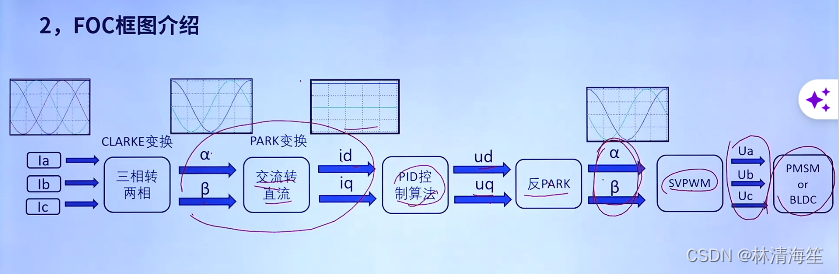
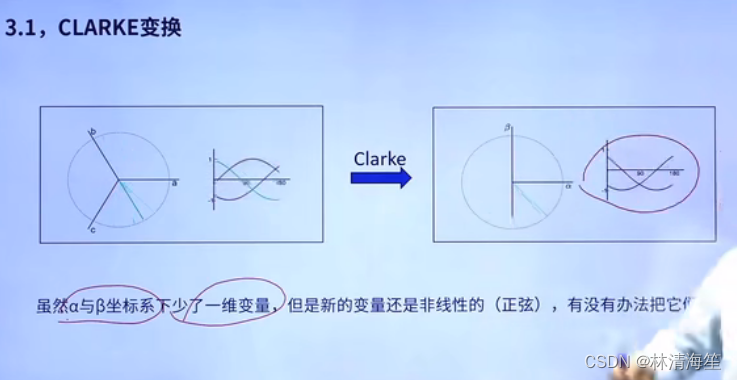
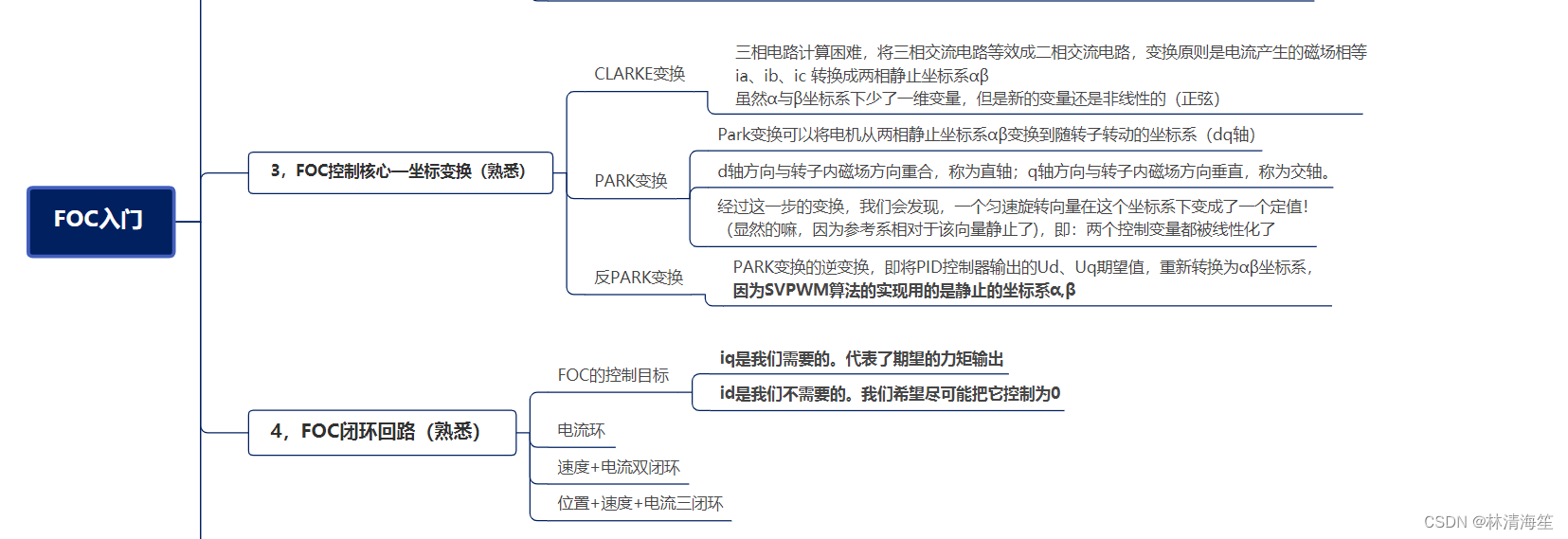
首先采集三相电流,经过CLARK变换。CLARK变换的作用可以简答理解为由三相转变为两项的作用。三相电流就是正弦波,120度的相位差的正弦波,转换之后就变成了α和β两项正弦波了。但是计算难度还是很大,因为是非线性不断变化的,方向大小都是不断变换的,去控制这样的变量难度是非常大的。
那么就需要经过PARK交流变换,交流转直流,转成直流之后就会变成线性的ip和iq。他们两个的值和方向都不改变了,进行正弦变量线性化了,这样控制会更加简单了。这样就能代入PID控制算法了,然后就可以输出Ud和Up电压了。之后来到反PARK变换,也就是跟前面PARK反过来的,将d和q变成α和β,也就是两项正弦波,因为svpwm需要用到这两个静止的坐标系,svpwm是需要使用到α和β,所以需要反变换过来,之后就输出ua和ub和uc来控制逆变电路,进而控制电机旋转起来。
在这里,我们可以把FOC的整个框图分为五个部分,第一部分是CLARKE变换,接着是PARK变换,接着是PID控制算法变换,反PARK,以及SVPWM。总共可以分为五个部分了。在后面会逐一拆开进行讲解。
3.常见问题
(1)为什么FOC要不断进行变换?
(2)什么是CLARKE变换,PARK变换和反PARK变换?
(3)α和β,d和q分别代表什么?
(4)什么是svpwm?
三.FOC控制核心——坐标变换(熟悉)
1.旋转的PMSM电机波形
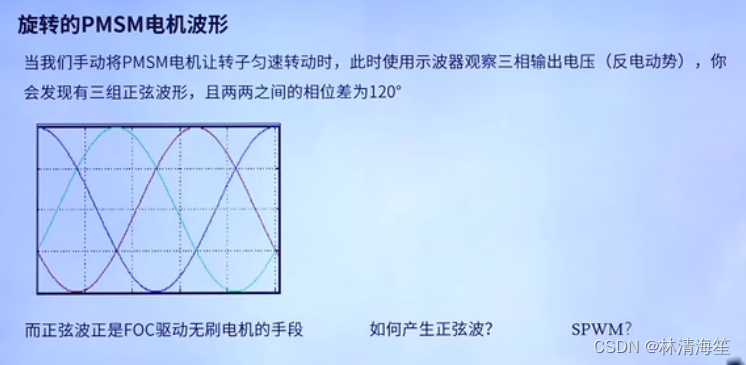
这里可以使用手动去让电机的转子匀速转动,然后就能使用示波器来观察三相饶阻uvw输出的电压,以及检测反电动势。所以速度不能太小,如果太小的话反电动势是非常小的,这时候会检测不出来了。所以这里要保持一定的速度。接着就会发现示波器出现三组正弦波了。它们之间还有相位差120度。
那么我们要控制电机旋转起来,就是输出这三项的正弦波才能使电机旋转起来。而这个正弦波正是FOC驱动无刷电机的手段。
那么这里有一个问题,如何才能产生正弦波呢?如果使用PWM模拟正弦波,那么就是SPWM了
2.SPWM
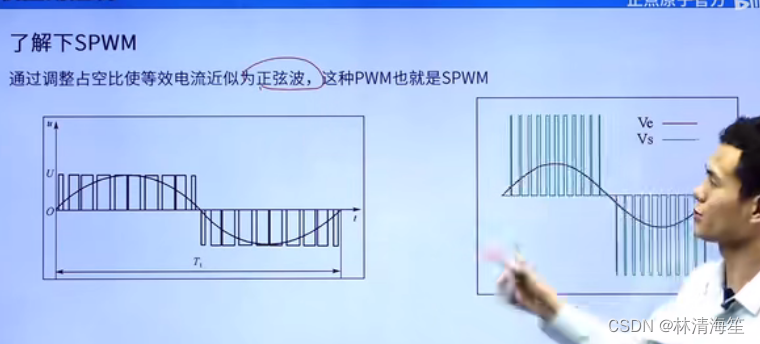
SPWM就是通过调整占空比的大小使其等效电流近似与正弦波。
比如,有一个LED灯,通过PWM控制。假设100%占空比输出10v,如果为50%,电压就会变为5v,如果为10%,就位1v。电压大小是可以通过电压大小来进行改变。正弦波的电压就是不断在改变的,可以使用不同的占空比来实现电压的变换。这样在经过低通滤波器之后就能得到一个正弦波了。
如下图,不同的占空比大小对应的电压是不一样的。这样就可以模拟出正弦波了。
右图绿色就是占空比大小,红色就是不同的占空比对应的电压值了。很明显占空比越大所对应的电压值也越大。那么我们就可以按照这种规律,一段一段的组合到一起,就可以形成正弦波了。
但是要注意SPWM是不依赖开关顺序的,3相之间时独立调制的。也就是说ABC各自有半桥电路,就能组成各自的三相逆变电路了,然后他们各自之间输入正弦波,就只负责生成正弦波,不管电机的任何状态,也不管电机的任何参数,就只负责输入正弦波,是没有任何反馈的,类似开环控制。但是这种系统是非常不稳定的。
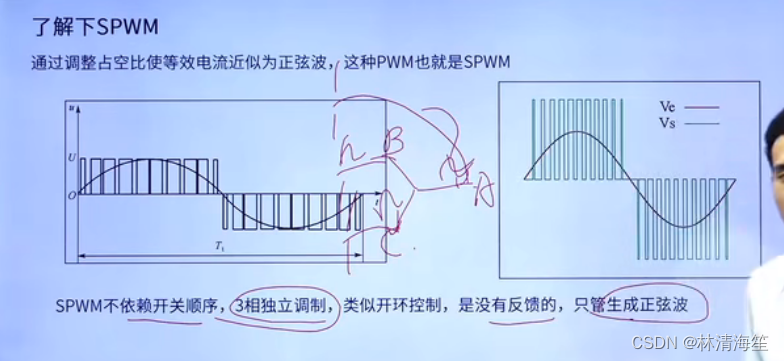
所以说SPWM调试方式在FOC上是不常用的,还有一个原因是SPWM的母线电压利用率要比SVPWM的母线电压利用率要低15%。
而且从控制的角度来看,不想跟三个正弦波来打交道的。因为要控制正弦波,难度是非常大的。因为正弦波是非线性的量。大小和方向都是不断改变的。

3.坐标变换
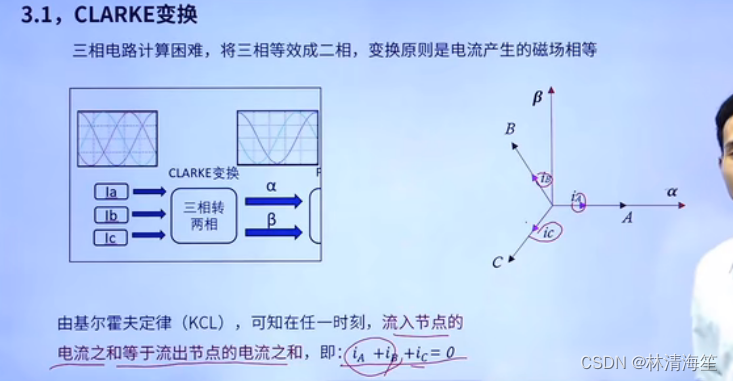
1)CLARKE变换
将三相转换成两相,因为三相电路计算是比较困难的。变换的原则是变换前后电流产生的磁场是必须相等的。
将三相电流的坐标系转换成直角坐标系α和β。
同时,三相电流是不需要同时检测的,通常来说只需要检测两项,另外一项可以通过KCL,得到
通过将abc三相电流进行正交分解。
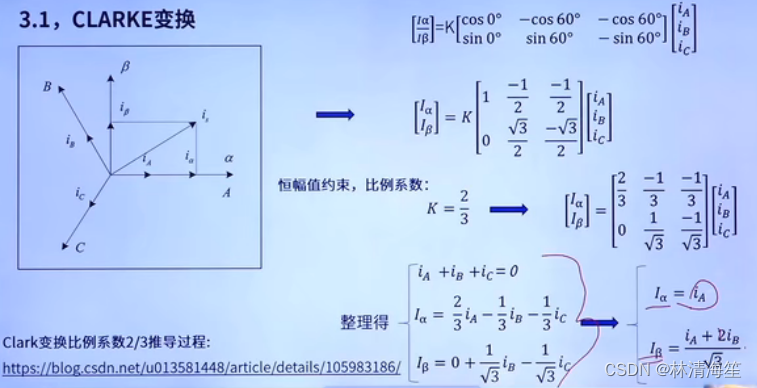
虽然α和β坐标系少了一维变量,但新的变量还是正弦波,所以还要进行操作变成线性化。
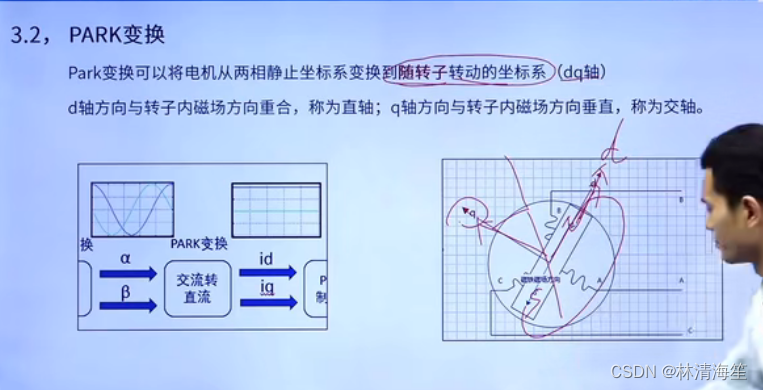
2)PARK变换
将α和β转化为id和iq。
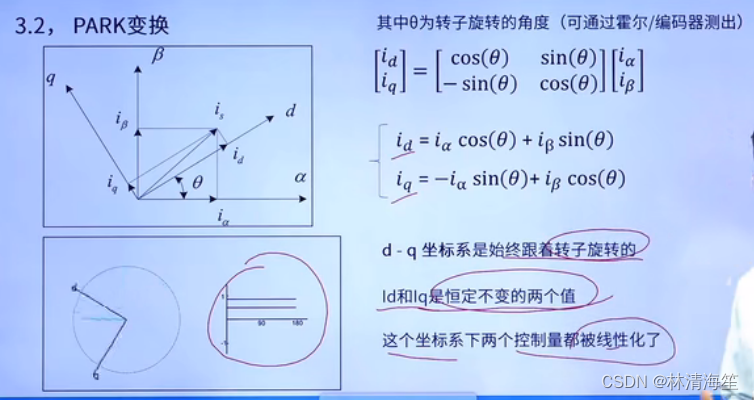
PARK变换就是将两相静止坐标系转换为随转子转动的坐标系,也就是dq轴。
d轴的方向是与转子内磁场的方向重合,也就是直轴。q轴的方向与转子内磁场的方向垂直,为交轴。
建设将α-β坐标系旋转θ角度(也就是转子旋转的角度,这个角度是可以通过霍尔或者位置编码器测出来的。)同样,也是将α-β轴进行正交分解。
这两个坐标系的两个控制量是线性的,就可以带入到PID控制器里面了。通过PID运算器运算出想要的期望值来进行控制。
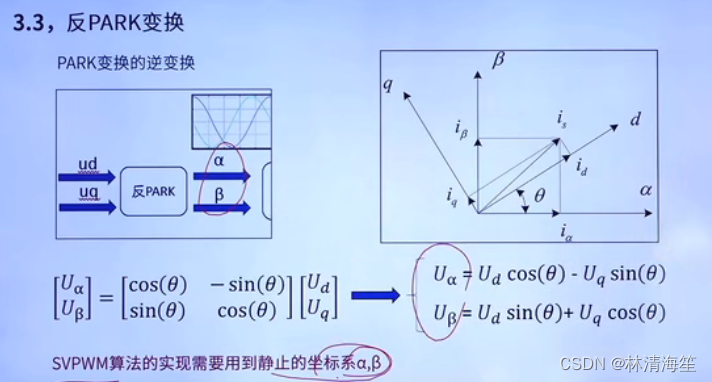
3)反PARK变换
就是将dq分解为α和β坐标系。Ud和Uq是PID控制器得到的坐标值。
经过反PARK变换是因为SVPWM算法需要α和β两个静止坐标系的。算法需要通过这两个变量得到的。
四.FOC闭环回路(熟悉)
1.PID控制器
这部分也就是PID控制器。PID控制器通常有三个环,第一个是电流环,通常作为最内环,通过电流反馈来得到电机电流的扭矩。
接着就是速度环,控制电机的转速的。
然后是位置环,控制电机的旋转位置。
先讲解的是电流环。
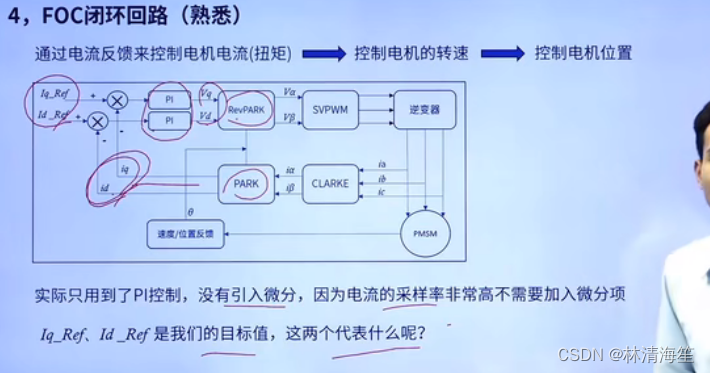
经过一系列变换后输出的是iq和id。然后跟目标值进行相减来得到的误差来进行PI运算。这里要注意的是这里只用到了PI控制,没有引入微分。因为电流的采样率是非常搞得,就不需要微分项了。输出的期望值之后再经过反PARK变换。
那么这里有一个疑问,iq和id的两个目标值分别代表的是什么?
2.电流环和FOC的意义
那么就需要了解FOC它的意义和目的。
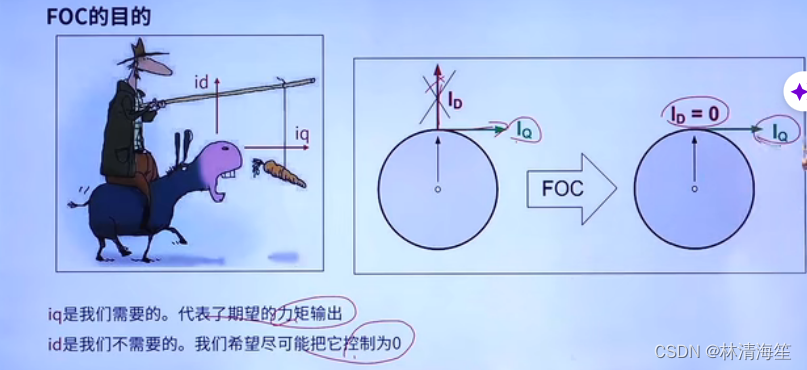
下面通过一个漫画进行演示,对于老头来说,是希望驴是一直往前走的,那么老头就会吊着一个萝卜,就给了驴向前走的驱动力,称为iq,当iq越大,驴走的就越快,越小走得就越慢。所以iq是我们需要的。id是我们不需要的,因为驴不用飞。
对比我们的电机,FOC也是一样的,对于转子来说,切线方向的iq是需要的,因为它驱动转子的一个力矩。与半径同方向的id是我们不需要的,只会增加我们的电流,让我们的电流让电机发热,
所以说id尽可能让电机控制到0,iq就是我们所期望的力矩输出。
所以电流环的两个目标值,iq就是我们期望的力矩输出,id的目标输出设置为0.
3.速度+电流环
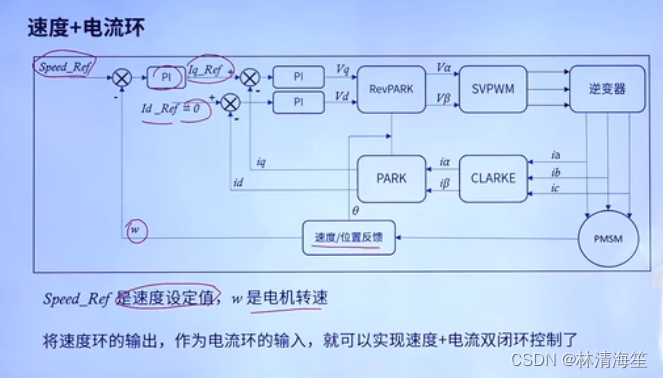
这就是在之前的基础上加上速度环。
首先Speed_ref就是速度的目标值了,w就是实际的电机转速,可以通过编码器或者霍尔传感器检测出来的,算出来的误差经过PI运算之后,将他们的输出值当做电流环的输入,iq就是我们期望的力矩输出。然后id是将尽可能控制到0。这样我们就能实现速度+电流双闭环控制了。
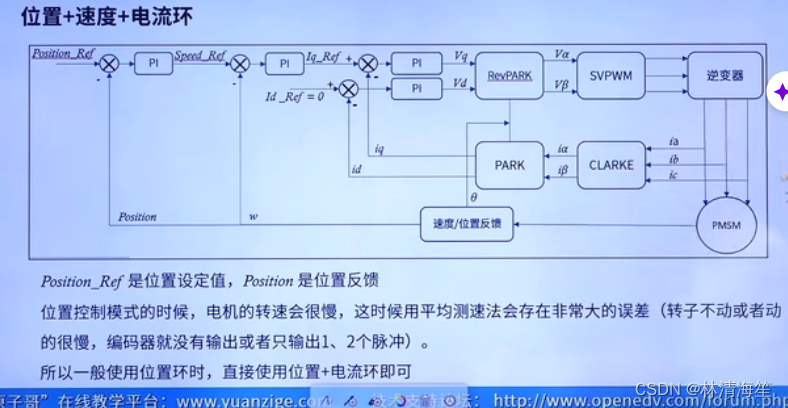
4.位置+速度+电流环
这在前面的基础上加上了位置环。
Position_ref是位置的期望值,position是实际的位置。然后将速度环的输出当做电流环的输入。这样就能实现三闭环了。
但是我们要注意了,位置环的电机转速会相对来说比较慢。那么如果我们使用平均测速方法误差就比较大了(因为转子要么不动要么动得很慢)此时编码器输出就只有几个波形了。所以对速度环的误差是比较大的,比较波动。所以在使用位置环的时候,就直接使用位置+电流双闭环即可。就可以把中间的速度环给去掉了。这样能够更加稳定一点。
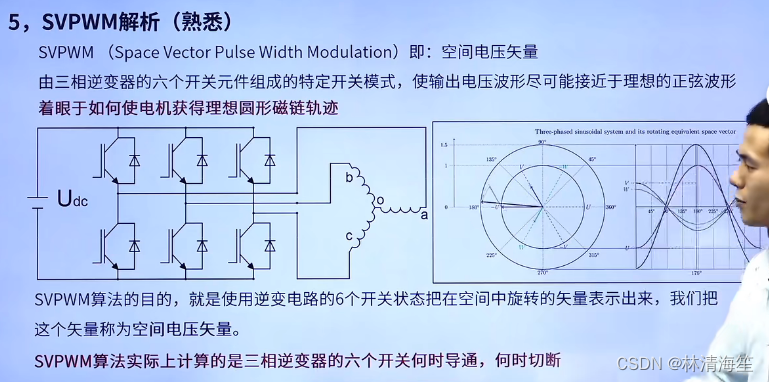
五.SVPWM解析(熟悉)
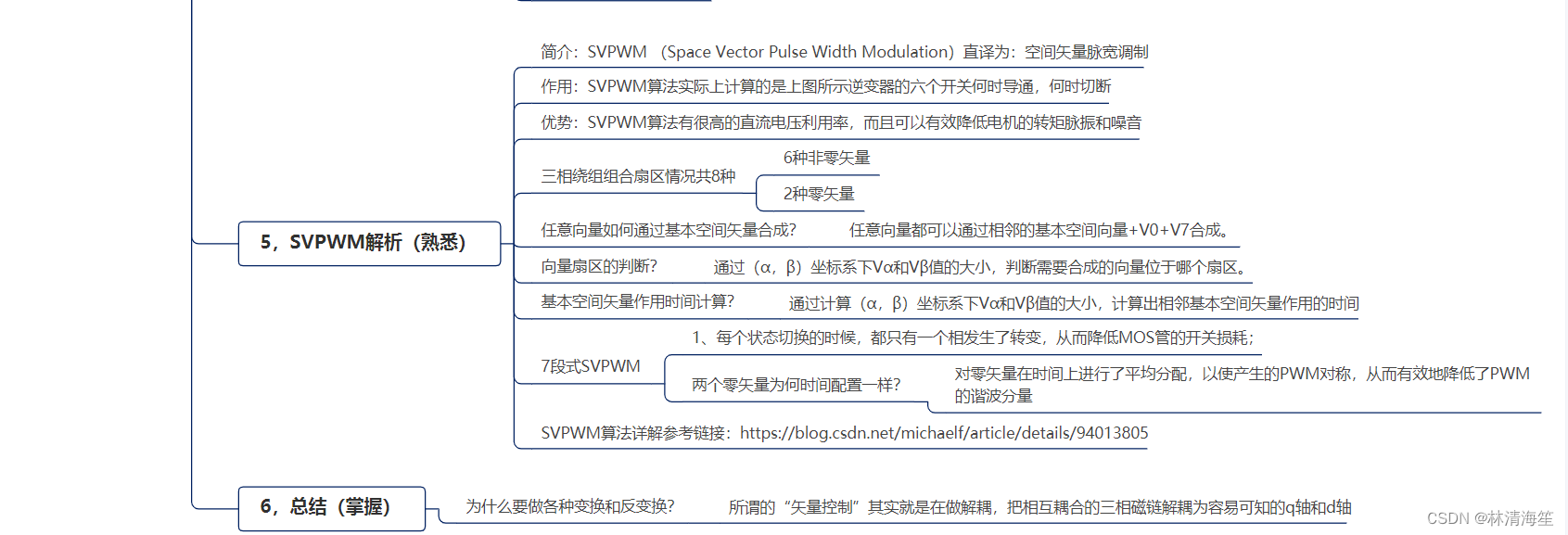
SVPWM(Space Vector Pluse Width Modulation)即空间电压矢量。它是由三相逆变器的六个开关元件组成的特定开关模式,使输出的电压波形尽可能接近于理想的正弦波形。也就是通过六个mos管组合使我们组合输出三项的相电压成正弦变化给无刷电机,让其旋转起来。因为FOC就是输出正弦波让无刷电机驱动起来的。这个步骤就是有SVPWM来实现的。
可以看到右边的动态示意图,这里有uvw三相,对应的就是abc这三相了。这三相有他们各自的电压矢量,它们的大小都是随时间成正弦规律变化的。这三个电压矢量它会合成一个总矢量,可以发现这个总矢量的大小的不变的,方向不断改变。这也是为什么FOC合成的力矩会更加的平稳。这也跟前面说的SPWM是不一样的,因为其三相是独立调制的,它只负责提供正弦波。那么SVPWM是把整个看成一个整体,着眼于如何使电机或得一个理想的圆形磁链轨迹。
所以SVPWM的目的,就是控制逆变电路的6个开关状态把在空间中旋转的矢量表示出来,这个矢量也就是空间电压矢量。
所以SVPWM算法实际上就是计算三相逆变器的六个开关何时导通,何时关闭。
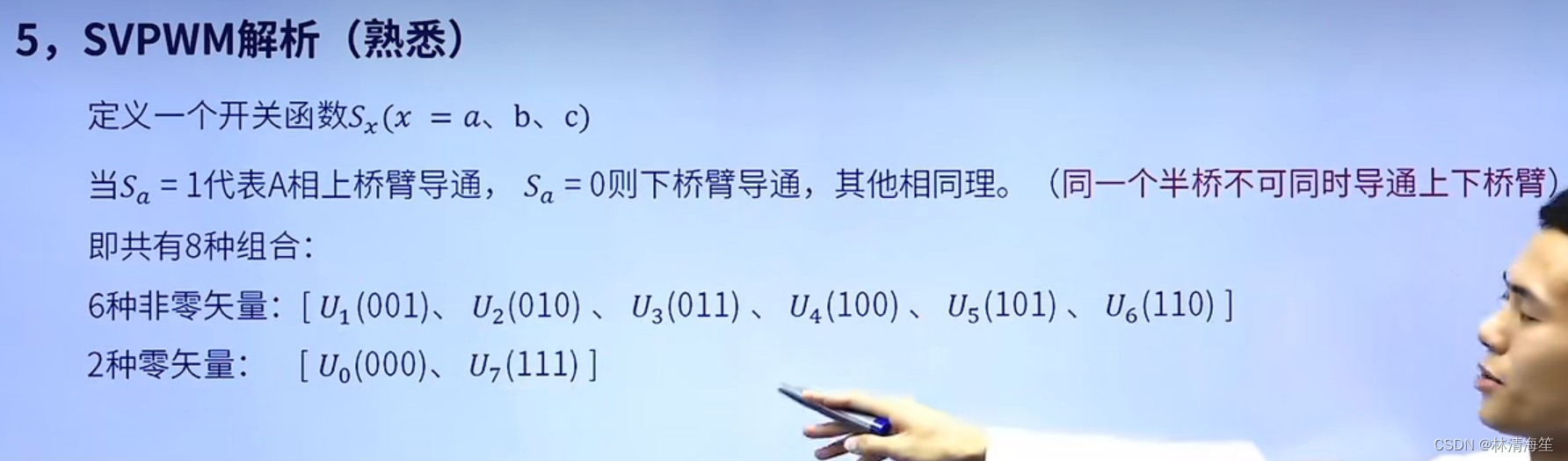
三相逆变器一共有八种组合,
然后,我们定义了一个开关函数Sx。
当Sa=1的时候代表上桥臂导通,Sa=0则表示下桥臂导通(同一个半桥补课同时导通上下桥臂)
所以总共有八种组合。
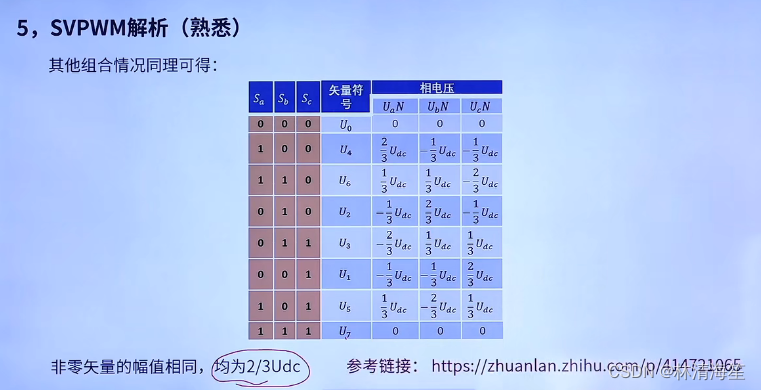
六种非零矢量。U1(001)表示a下桥臂b下桥臂c上桥臂导通,既有上桥臂又有下桥臂就会产生电压差,有电压差就会有有向电流。这种有向电流的矢量称为非零矢量。
零矢量表示abc三个桥臂同时接下桥臂或者上桥臂。这样就不会产生电压差的,也就没有有向电流。
下面以U4(100)来分析,a上bc下桥臂导通,从a相电流流向b和c相。这就等效于右图的电路。
此时他们三相的相电阻是相等的。通过串联分压定理可以得到Uan为2/3Udc
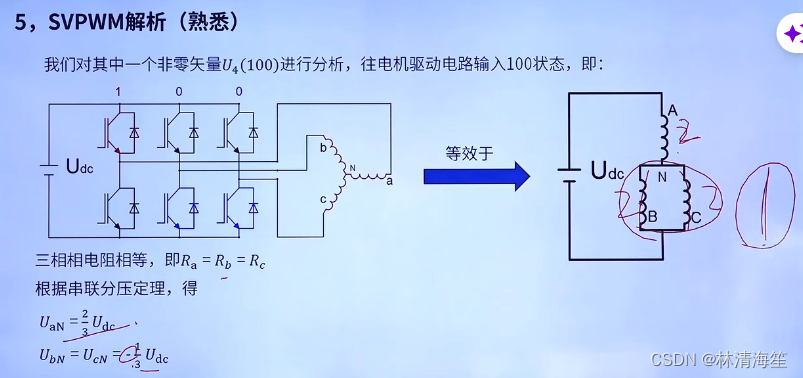
其他组合同理,这里给出了其他组合的表格。
可以发现非零矢量的幅值是相同的,均为2/3Udc。
注意电压是标量,电压矢量是矢量,矢量的正方向是由我们自己定义的。这里定义以指向中心点o的方向为负,反之为正。
由于a接上桥臂,所以是正方向OA。bc接下桥臂,所以方向为负。他们所合成的电压矢量为U4。
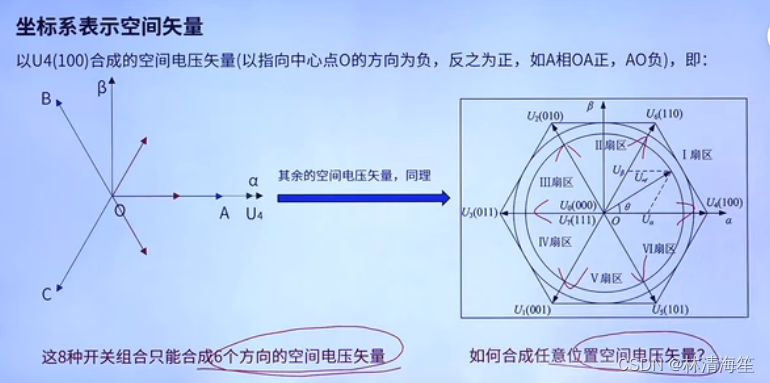
其他组合同理,就能得到右图的六边形图。零矢量是没有有向电流的,所以它就在原点处。
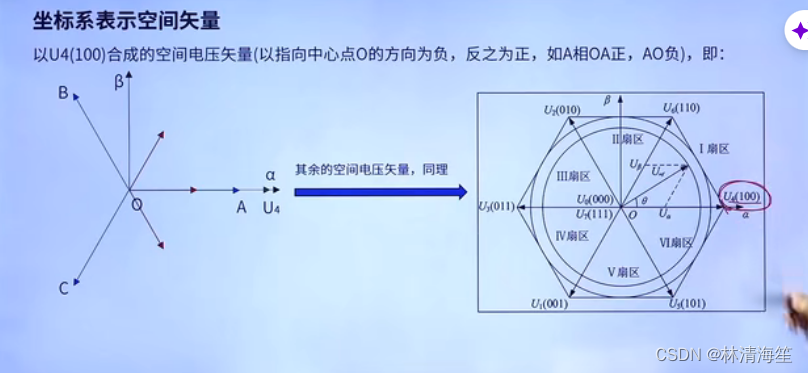
但这里会有一个疑问,这八种开关组合只能合成六个方向的空间电压矢量。那么我们应该如何合成任意位置的空间电压矢量呢?
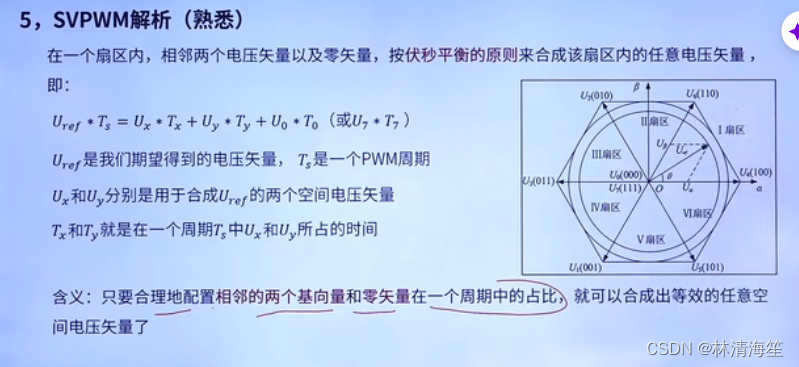
那么在这里以扇区为单位,在一个扇区内,相邻两个电压矢量以及零矢量,按照伏秒平衡的原则来合成该扇区内的任意位置的电压矢量。就是满足下面的关系式。
Uref就是期望得到的电压矢量,也就是任意位置的电压矢量,Ts是一个PWM周期,也就是定时器周期。
Ux和Uy分别是用于合成Uref的两个空间电压矢量。
Tx和Ty就是在一个周期中Ux和Uy所占的时间。
那么假设Uref在第一扇区,那么Ux和Uy就是其相邻两个矢量U4和U6,以及零矢量U0和U7了,来合成这个Uf。主要区别是他们各自时间的占比Tx和Ty。只要算出各自的时间占比,就能算出任意位置的空间电压矢量了。
所以问题1:如何计算相邻电压矢量与零矢量在一个周期内的时间占比?还有就是扇区的判断了,因为每一个扇区相邻的矢量是不一样的。

首先我们假设在扇区一,通过U4和U6两个矢量合成Uref,就满足伏秒平衡的公式。
Uref等于相邻的电压矢量乘以他们的时间,还有零矢量。
接着就对期望的电压矢量进行分解,分解到α和β轴。
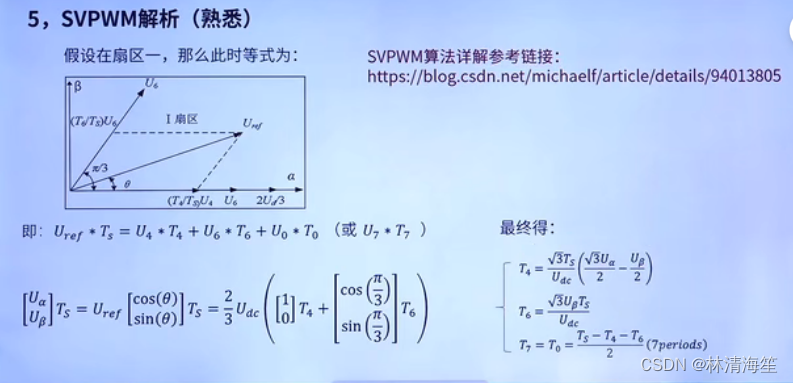
U4和U6实际上就是2/3Udc。
由于U4整个都是α轴上,所以其在α轴上的分量为1,在β轴上的分量为0。
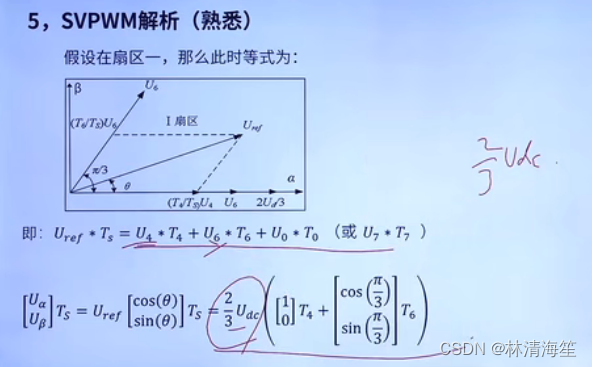
最终解得算到α和β,和前面的PARK变换联系上了。
Ts减去T4再减去T6就是剩下零矢量的时间了。这里零矢量的时间是可以自由分配的,在这里平均分配给T0和T7,所以剩余的零矢量除以2进行分配。
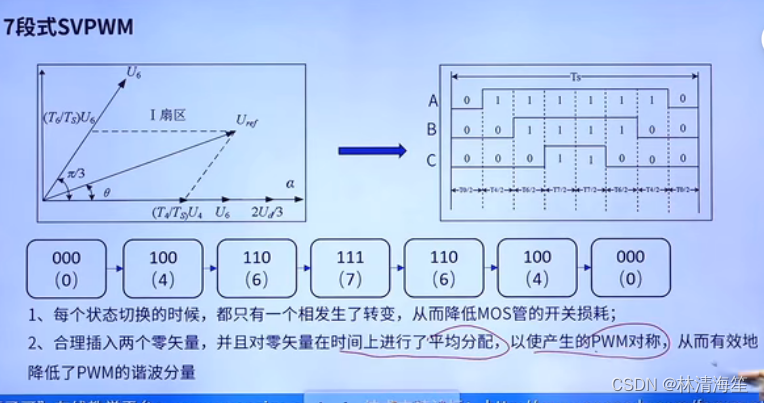
在这里是以七段式的SVPWM为例。
- 七段式SVPWM
同样还是以第一个扇区为例。
在前面我们已经算出了T4,T6,T0,T7对应每个电压矢量所持续的时间,我们只要保证电压矢量持续这么长的时间,就可以合成这一个期望矢量Uref。
但是七段式的SVPWM它有自己的一个顺序(如右图),第一步U0持续T0/2的时间,第二步U4持续T4/2的时间,然后是U6持续T6/2的时间,U7持续T7/2的时间,然后反过来,U7持续T7/2的时间,U6持续T6/2的时间…………整个时间加起来就是T7,T4,T6,T0。这跟之前的是等效的,但是在实际应用中要考虑到mos管的开关损耗。
所以我们可以发现,这七段式的SVPWM的每一个变化就只有一相发生了变化。所以这可以大大降低mos管的开关损耗。
除此之外,还合理插入了两个零矢量,并且对零矢量上对时间进行平均分配,可以使产生的PWM堆成,从而有效的降低了PWM的谐波分量。
这样我们就可以求出了相邻的两个电压矢量的时间,以及零矢量的时间。就可以看出这个波形了,其他的扇区也是同理的。
然后我们就可以去设置它的占空比,去比较值,就可以使PWM输出这样的波形了。就可以使三相去合成想要的矢量了。
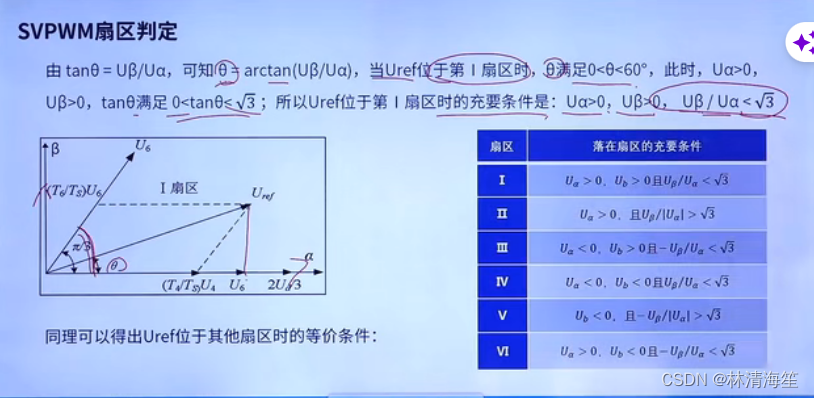
- 扇区的判定
那么这里还剩下一个疑问,如何判断期望的电压矢量所在的扇区呢?因为不同的扇区所用的基向量是不一样的。
同样在这里以扇区1为例,θ值可以通过Uβ比上Uα的反正切值来得到。当期望电压Uref在第一个扇区的时候,此时θ满足0~60度之间,而且α和β都是大于0的。所以tanθ在0到根号3之间。然后我们就可以没到Uref在第一扇区的充要条件是
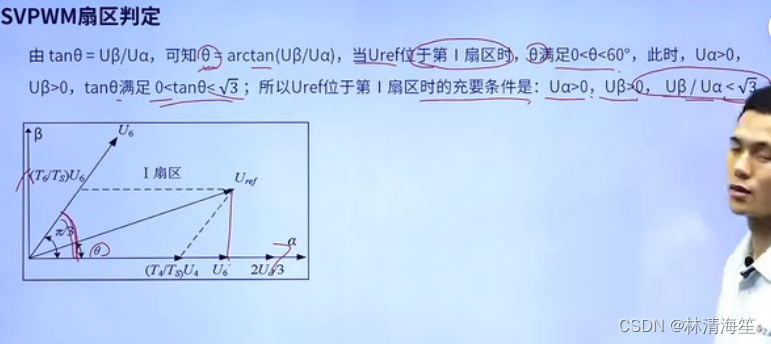
那么在其他扇区同理,已经在下图的表格中展示出来了。那么这样就解决了SVPWM的扇区判定了。那么判断完扇区之后,就可以求出相邻的两个矢量以及零矢量所持续的时间了。
六.课堂总结(掌握)
相关文章:
【正点原子】STM32电机应用控制学习笔记——8.FOC简介
FOC是适用于无刷电机的,而像有刷电机,舵机,步进电机是不适用FOC的。FOC是电机应用控制难度最大的部分了。 一.FOC简介(了解) 1.介绍 FOC(Filed Oriented Control)即磁场定向控制,…...
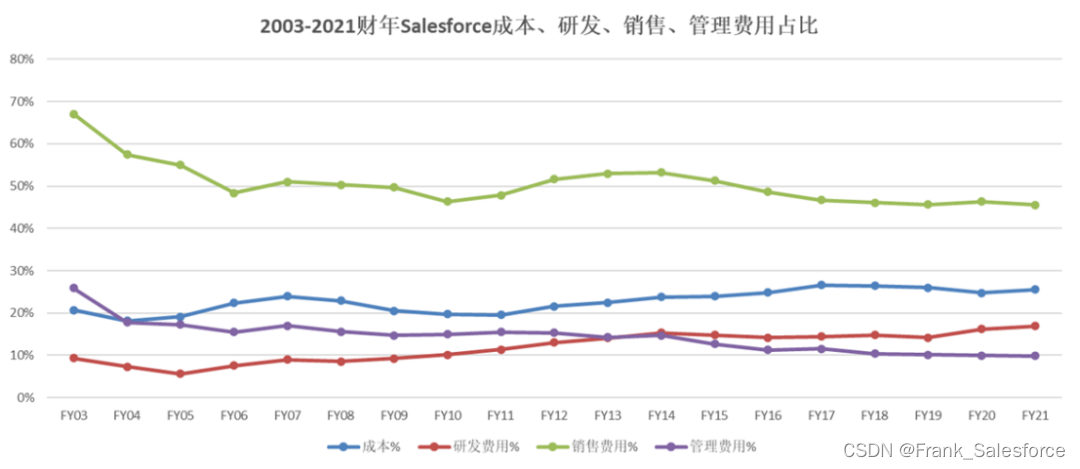
Salesforce财务状况分析
纵观Salesforce发展史和十几年财报中的信息,Salesforce从中小企业CRM服务的蓝海市场切入,但受限于中小企业的生命周期价值和每用户平均收入小且获客成本和流失率不对等,蓝海同时也是死海。 Salesforce通过收购逐渐补足品牌和产品两块短板&am…...

服务器管理平台开发(2)- 设计数据库表
数据库表设计 本篇文章主要对数据管理平台数据库表设计进行介绍,包括单库多表设计、SQL语句、视图构造等 1、整体设计 设备品牌、序列号、型号等使用业务主表进行记录,逻辑磁盘、PCI设备可能出现1对N的情况,分别使用PCI设备表、Mac地址表、逻…...
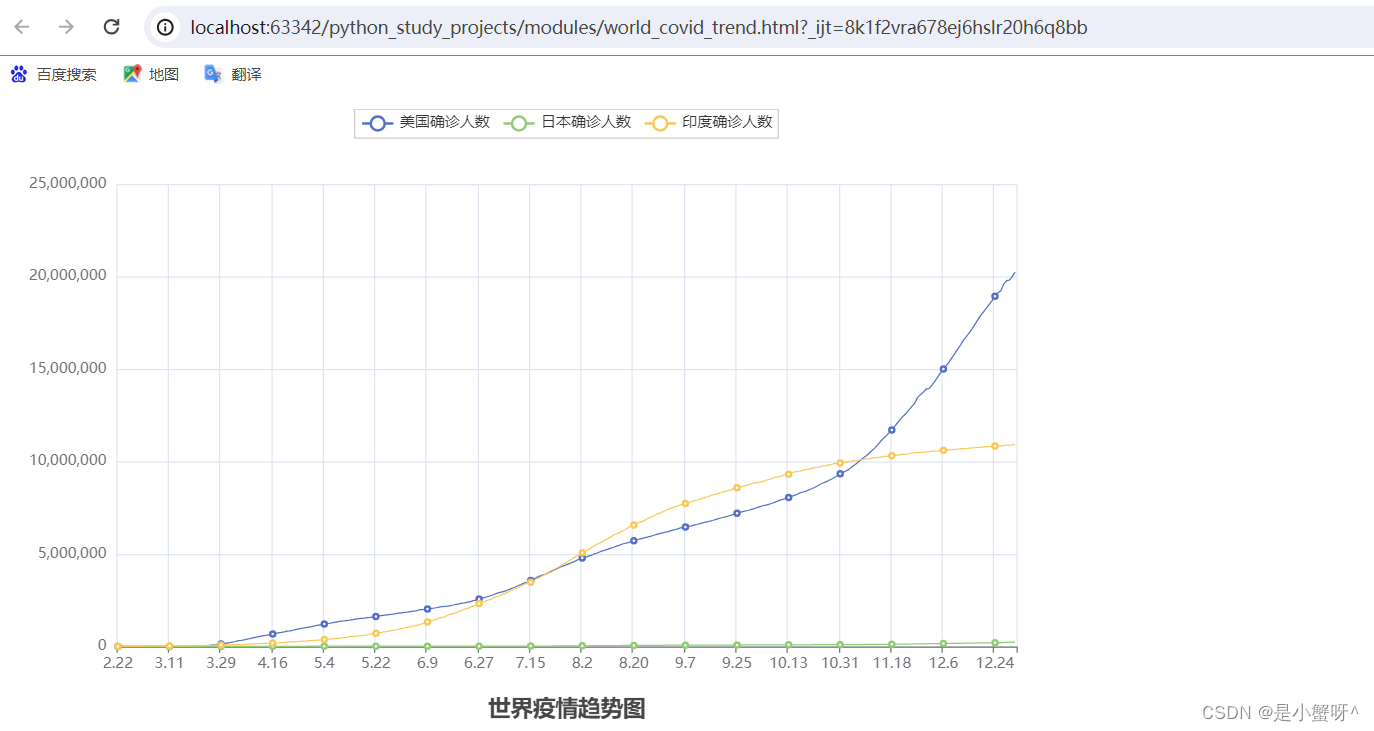
Python基础知识:整理13 利用pyecharts生成折线图
首先需要安装第三方包pyecharts 1 基础折线图 # 导包,导入Line功能构建折线图对象 from pyecharts.charts import Line # 折线图 from pyecharts.options import TitleOpts # 标题 from pyecharts.options import LegendOpts # 图例 from pyecharts.options im…...

java项目之家政服务中介网(ssm)
风定落花生,歌声逐流水,大家好我是风歌,混迹在java圈的辛苦码农。今天要和大家聊的是一款基于ssm的家政服务中介网。项目源码以及部署相关请联系风歌,文末附上联系信息 。 项目简介: 管理员:首页、个人中…...
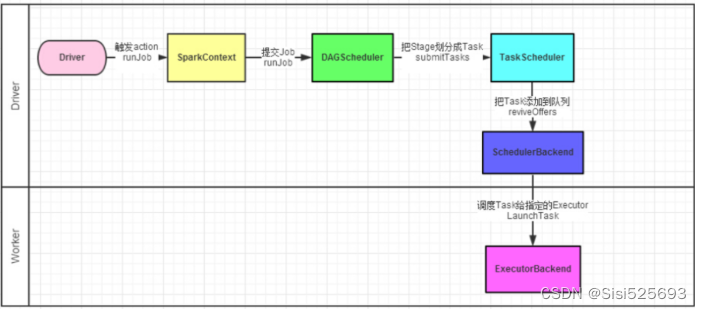
Spark的内核调度
目录 概述 RDD的依赖 DAG和Stage DAG执行流程图形成和Stage划分 Stage内部流程 Spark Shuffle Spark中shuffle的发展历程 优化前的Hash shuffle 经过优化后的Hash shuffle Sort shuffle Sort shuffle的普通机制 Job调度流程 Spark RDD并行度 概述 Spark内核调度任务: 1…...

C++代码重用:继承与组合的比较
目录 一、简介 继承 组合 二、继承 三、组合 四、案例说明 4.1一个电子商务系统 4.1.1继承方式 在上述代码中,Order类继承自User类。通过继承,Order类获得了User类的成员函数和成员变量,并且可以添加自己的特性。我们重写了displayI…...
暴打小苹果
欢迎来到程序小院 暴打小苹果 玩法:鼠标左键点击任意区域可发招暴打,在苹果到达圆圈时点击更容易击中, 30秒挑战暴打小苹果,打中一次20分,快去暴打小苹果吧^^。开始游戏https://www.ormcc.com/play/gameStart/247 htm…...

【BetterBench】2024年都有哪些数学建模竞赛和大数据竞赛?
2024年每个月有哪些竞赛? 2024年32个数学建模和数据挖掘竞赛重磅来袭!!! 2024年数学建模和数学挖掘竞赛时间目录汇总 一月 (1)2024年第二届“华数杯”国际大学生数学建模竞赛 报名时间:即日起…...

Vue-9、Vue事件修饰符
1、prevent 阻止默认事件 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>事件修饰符</title><!--引入vue--><script type"text/javascript" src"https://cdn.jsdeliv…...

前端面试题集合六(高频)
1、vue实现双向数据绑定原理是什么? <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8" /><meta name"viewport" content"widthdevice-width, initial-scale1.0" /><title>…...
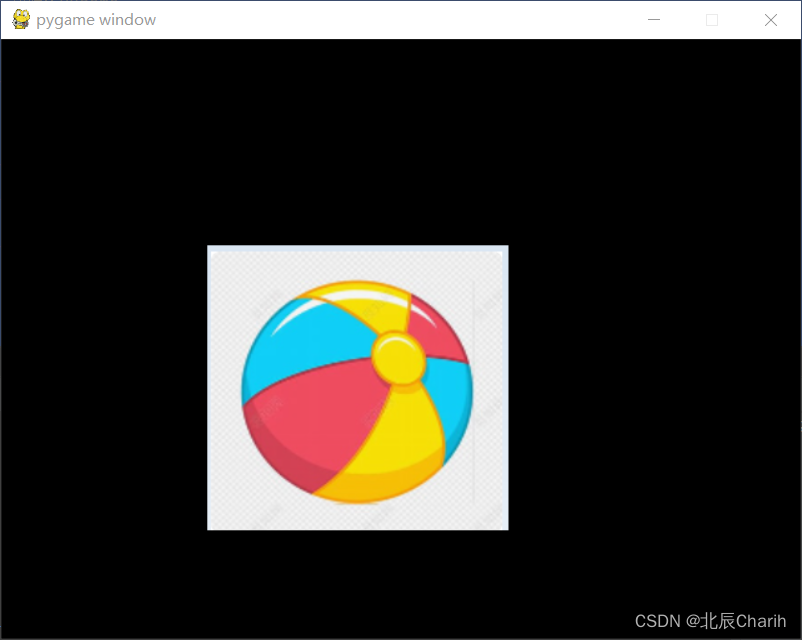
使用Pygame库创建了一个窗口,并在窗口中加载了一个名为“ball.png“的图片,通过不断改变物体的位置,实现了一个简单的动画效果
import pygame import sys# 初始化Pygame pygame.init()# 创建窗口 screen pygame.display.set_mode((640, 480))# 加载图片 image pygame.image.load("ball.png")# 将物体初始位置设为屏幕左上角 x 0 y 0# 游戏循环 while True:# 处理事件for event in pygame.e…...

常见的AdX程序化广告交易模式有哪些?媒体如何选择恰当的交易模式?
程序化广告的核心目的是:让需求方能自由地选择流量与出价,程序化广告在数字广告投放中的主导地位日益巩固。 程序化广告“交易模式”有哪些?以下是详细解读,帮助媒体选择恰当的交易方式,从而实现广告价值的最大化。 …...

VCG 网格平滑之Laplacian平滑
文章目录 一、简介二、实现代码三、实现效果参考资料一、简介 由于物理采样过程固有的局限性,三维扫描仪获得的网格通常是有噪声的。为了消除这种噪声,所谓的平滑算法被开发出来。这类方法有很多,VCG主要为我们提供了一种是较为经典的Laplace平滑算法,这个方法很多库都有实…...

Jupyter Markdown格式
穿插在程序中,太复杂了喧宾夺主,太简单了不如注释。这样就刚刚好: Headers # header 1 ## header 2 ### header 3 #### header 4Output: header 1 header 2 header 3 header 4 2. Horizontal Line Use any of three to draw a horizon…...

Vue3 实时显示时间
记录一下代码,方便以后使用 参考的文章链接 做了以下修改 修改了formateDate方法中传入参数这个不合理的地方给定时器增加了间隔时间增加了取消定时器的方法 <!-- template中的代码 --> <span>当前时间:{{ nowTime }}</span>// sc…...
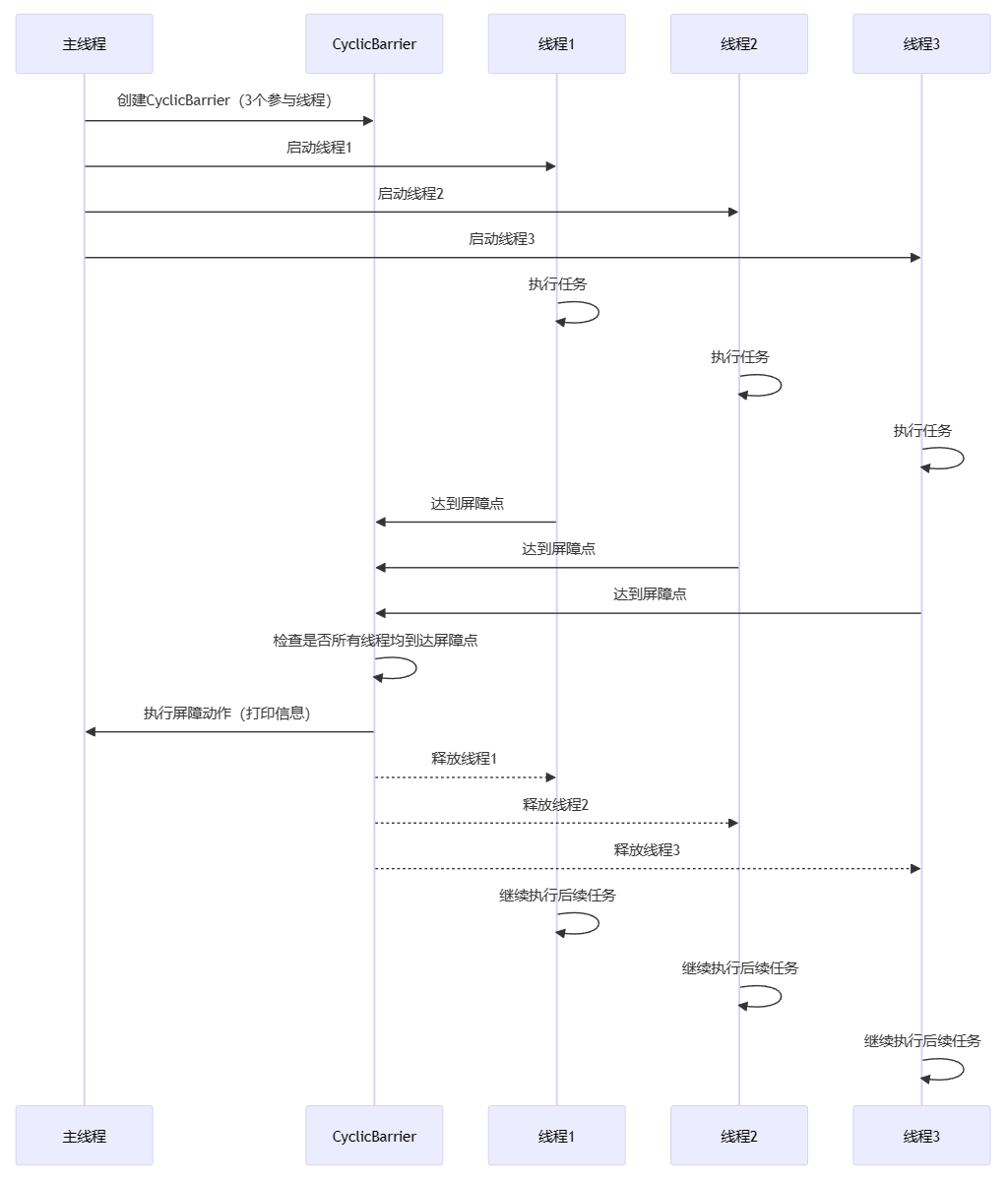
详解Java多线程之循环栅栏技术CyclicBarrier
第1章:引言 大家好,我是小黑,工作中,咱们经常会遇到需要多个线程协同工作的情况。CyclicBarrier,直译过来就是“循环屏障”。它是Java中用于管理一组线程,并让它们在某个点上同步的工具。简单来说…...

ebpf学习
学习ebpf相关知识 参考资料: awesome-ebpf 文章目录 初识准备ebpf.io介绍cilium的介绍内核文档Brendan Greggs Blog 的介绍书籍Learning eBPFWhat is eBPF? 交互式环境视频 基础知识学习学习环境搭建书籍阅读 项目落地流程整理环境搭建内核编译bcc环境变量zliblibelflibbpflib…...
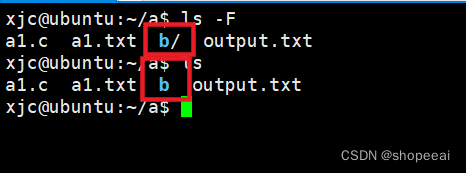
【Linux】Linux系统编程——ls命令
【Linux】Linux 系统编程——ls 命令 1.命令概述 ls 命令是 Linux 和其他类 Unix 操作系统中最常用的命令之一。ls 命令是英文单词 list 的缩写,正如 list 的意思,ls 命令用于列出文件系统中的文件和目录。使用此命令,用户可以查看目录中的…...
QA面试题
1、质量保证(QA)是什么? QA代表质量保证。QA 是一组活动,旨在确保开发的软件满足 SRS 文档中提到的所有规范或要求。QA 遵循 PDCA 循环: 计划/Plan - 计划是质量保证的一个阶段,组织在此阶段确定构建高质量软件产品所需的过程。做…...

Vim 调用外部命令学习笔记
Vim 外部命令集成完全指南 文章目录 Vim 外部命令集成完全指南核心概念理解命令语法解析语法对比 常用外部命令详解文本排序与去重文本筛选与搜索高级 grep 搜索技巧文本替换与编辑字符处理高级文本处理编程语言处理其他实用命令 范围操作示例指定行范围处理复合命令示例 实用技…...
练习(含atoi的模拟实现,自定义类型等练习)
一、结构体大小的计算及位段 (结构体大小计算及位段 详解请看:自定义类型:结构体进阶-CSDN博客) 1.在32位系统环境,编译选项为4字节对齐,那么sizeof(A)和sizeof(B)是多少? #pragma pack(4)st…...

【解密LSTM、GRU如何解决传统RNN梯度消失问题】
解密LSTM与GRU:如何让RNN变得更聪明? 在深度学习的世界里,循环神经网络(RNN)以其卓越的序列数据处理能力广泛应用于自然语言处理、时间序列预测等领域。然而,传统RNN存在的一个严重问题——梯度消失&#…...
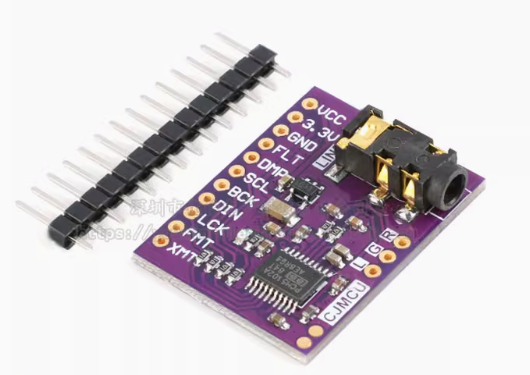
ESP32 I2S音频总线学习笔记(四): INMP441采集音频并实时播放
简介 前面两期文章我们介绍了I2S的读取和写入,一个是通过INMP441麦克风模块采集音频,一个是通过PCM5102A模块播放音频,那如果我们将两者结合起来,将麦克风采集到的音频通过PCM5102A播放,是不是就可以做一个扩音器了呢…...

AI编程--插件对比分析:CodeRider、GitHub Copilot及其他
AI编程插件对比分析:CodeRider、GitHub Copilot及其他 随着人工智能技术的快速发展,AI编程插件已成为提升开发者生产力的重要工具。CodeRider和GitHub Copilot作为市场上的领先者,分别以其独特的特性和生态系统吸引了大量开发者。本文将从功…...
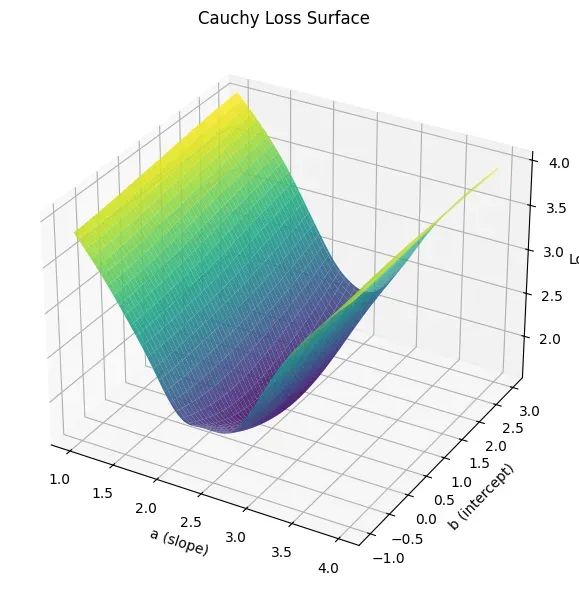
让回归模型不再被异常值“带跑偏“,MSE和Cauchy损失函数在噪声数据环境下的实战对比
在机器学习的回归分析中,损失函数的选择对模型性能具有决定性影响。均方误差(MSE)作为经典的损失函数,在处理干净数据时表现优异,但在面对包含异常值的噪声数据时,其对大误差的二次惩罚机制往往导致模型参数…...
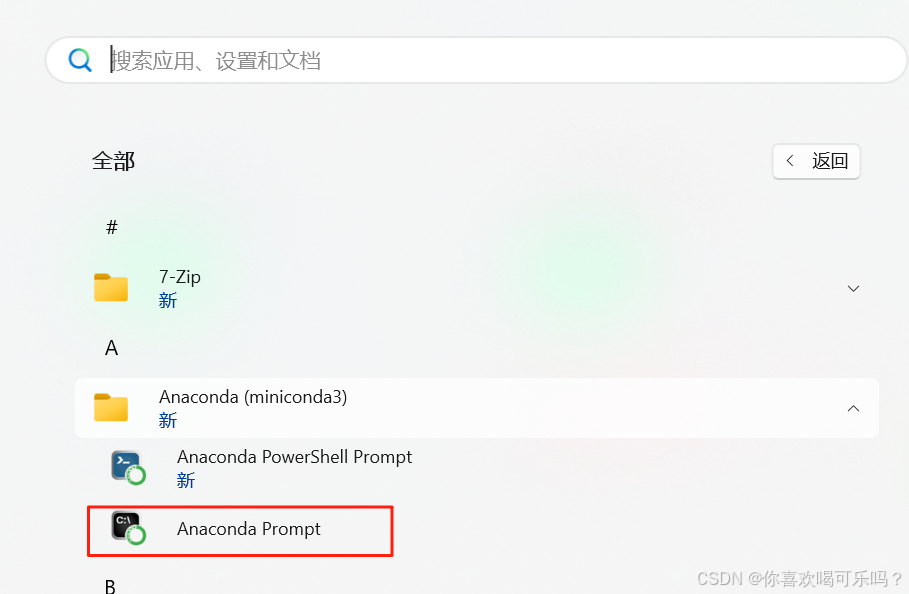
Windows安装Miniconda
一、下载 https://www.anaconda.com/download/success 二、安装 三、配置镜像源 Anaconda/Miniconda pip 配置清华镜像源_anaconda配置清华源-CSDN博客 四、常用操作命令 Anaconda/Miniconda 基本操作命令_miniconda创建环境命令-CSDN博客...
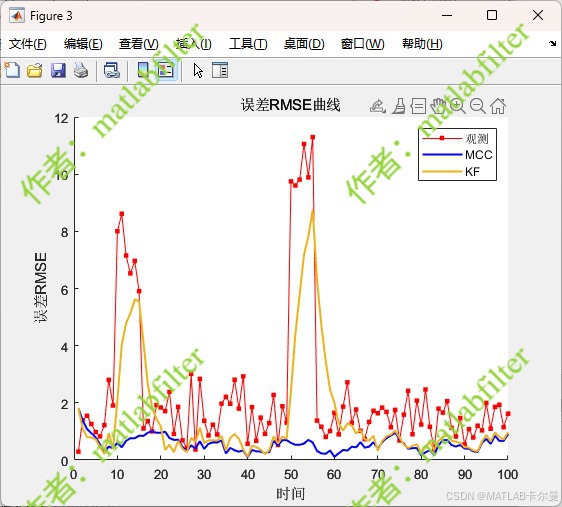
【MATLAB代码】基于最大相关熵准则(MCC)的三维鲁棒卡尔曼滤波算法(MCC-KF),附源代码|订阅专栏后可直接查看
文章所述的代码实现了基于最大相关熵准则(MCC)的三维鲁棒卡尔曼滤波算法(MCC-KF),针对传感器观测数据中存在的脉冲型异常噪声问题,通过非线性加权机制提升滤波器的抗干扰能力。代码通过对比传统KF与MCC-KF在含异常值场景下的表现,验证了后者在状态估计鲁棒性方面的显著优…...

省略号和可变参数模板
本文主要介绍如何展开可变参数的参数包 1.C语言的va_list展开可变参数 #include <iostream> #include <cstdarg>void printNumbers(int count, ...) {// 声明va_list类型的变量va_list args;// 使用va_start将可变参数写入变量argsva_start(args, count);for (in…...

作为测试我们应该关注redis哪些方面
1、功能测试 数据结构操作:验证字符串、列表、哈希、集合和有序的基本操作是否正确 持久化:测试aof和aof持久化机制,确保数据在开启后正确恢复。 事务:检查事务的原子性和回滚机制。 发布订阅:确保消息正确传递。 2、性…...