机器人持续学习基准LIBERO系列5——获取显示深度图
0.前置
- 机器人持续学习基准LIBERO系列1——基本介绍与安装测试
- 机器人持续学习基准LIBERO系列2——路径与基准基本信息
- 机器人持续学习基准LIBERO系列3——相机画面可视化及单步移动更新
- 机器人持续学习基准LIBERO系列4——robosuite最基本demo
1.更改环境设置
- LIBERO-master/libero/libero/envs/env_wrapper.py,第37行camera_depths=False改为True

2.获取归一化后的深度图
- robosuite里面直接获取到的是三维的归一化到[0,1]区间的深度图
- 其中第三个维度为通道数1
agentview_depth = (obs["agentview_depth"])
robot0_eye_in_hand_depth = (obs["robot0_eye_in_hand_depth"])
3.调整显示深度图
- 要把第三个维度去掉,再把值扩大到0-255,化为整数才能显示(参考)
agentview_depth = (agentview_depth.squeeze() * 255) .astype(np.uint8)
robot0_eye_in_hand_depth = (robot0_eye_in_hand_depth.squeeze() * 255) .astype(np.uint8)
- 显示
display(Image.fromarray(agentview_depth))
display(Image.fromarray(robot0_eye_in_hand_depth))4.同时可视化彩色图和深度图
- 前置代码:机器人持续学习基准LIBERO系列1——基本介绍与安装测试, 机器人持续学习基准LIBERO系列2——路径与基准基本信息
env_args = {"bddl_file_name": os.path.join(os.path.join(get_libero_path("bddl_files"), task.problem_folder, task.bddl_file)),"camera_heights": 128,"camera_widths": 128
}env = OffScreenRenderEnv(**env_args)
#设置种子
env.seed(0)
#环境重置
env.reset()
#初始化
env.set_init_state(init_states[0])import numpy as np
#运动机械臂更新环境
obs, _, _, _ = env.step([0.] * 7)
#获取手外相机视角图片
agentview_image = (obs["agentview_image"])
robot0_eye_in_hand_image = (obs["robot0_eye_in_hand_image"])
agentview_depth = (obs["agentview_depth"])
robot0_eye_in_hand_depth = (obs["robot0_eye_in_hand_depth"])
#深度图第三个维度是1,还是归一化后的,所以要把第三个维度去掉,再把值扩大到0-255,化为整数才能显示
#https://www.coder.work/article/7752795
agentview_depth = (agentview_depth.squeeze() * 255) .astype(np.uint8)
robot0_eye_in_hand_depth = (robot0_eye_in_hand_depth.squeeze() * 255) .astype(np.uint8)
display(Image.fromarray(agentview_image))
display(Image.fromarray(agentview_depth))
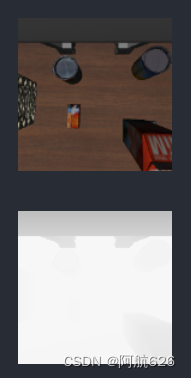
display(Image.fromarray(robot0_eye_in_hand_image))
display(Image.fromarray(robot0_eye_in_hand_depth))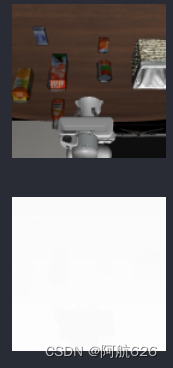
- 关闭环境
env.close()
相关文章:
机器人持续学习基准LIBERO系列5——获取显示深度图
0.前置 机器人持续学习基准LIBERO系列1——基本介绍与安装测试机器人持续学习基准LIBERO系列2——路径与基准基本信息机器人持续学习基准LIBERO系列3——相机画面可视化及单步移动更新机器人持续学习基准LIBERO系列4——robosuite最基本demo 1.更改环境设置 LIBERO-master/l…...

Java 面试题 - 多线程并发篇
线程基础 创建线程有几种方式 继承Thread类 可以创建一个继承自Thread类的子类,并重写其run()方法来定义线程的行为。然后可以通过创建该子类的实例来启动线程。 示例代码: class MyThread extends Thread {public void run() {// 定义线程的行为} …...

2401d,讨论d串滑动参数
原文 因为对编译时执行的i串的兴趣,我一直在考虑搞个通用用例,而不是相关i串的用例. 滑动模板参数 请考虑以下模板: void pluto(string s)() {pragma(msg, s); } void test() {pluto!"hello"(); }因为s是编译时参数,这编译,而pragma(msg,s) 期望s为编译时值. voi…...

etcd官方docker镜像及dockerfile问题处理
解决下我之前etcd使用docker镜像启动的坑 1、问题镜像docker-file: 这个dockerfile看着看不出来问题,但如果有人真的执行我之前两篇文章的文件,就会有问题,什么问题呢,无法连接到etcd,由于我是刚装上docker,排查了一圈,包括docker网络及是否是本地docker的网络问题,…...

2023 IoTDB Summit:天谋科技高级开发工程师苏宇荣《汇其流:如何用 IoTDB 流处理框架玩转端边云融合》...
12 月 3 日,2023 IoTDB 用户大会在北京成功举行,收获强烈反响。本次峰会汇集了超 20 位大咖嘉宾带来工业互联网行业、技术、应用方向的精彩议题,多位学术泰斗、企业代表、开发者,深度分享了工业物联网时序数据库 IoTDB 的技术创新…...
Pygame程序的屏幕显示
不同对象的绘制与显示过程 在Pygame中,需要将所有需要在屏幕上显示的内容都绘制在一个display surface上。该Surface通常称为screen surface,它是pygame.display.set_mode()函数返回的Surface对象。 在绘制不同对象时,可以使用不同的绘制方…...
LVGL的List控件的触摸按键和实体按键的处理
在LVGL的List控件使用过程中,虽然通过触摸按键选择item,但是有些场景需要实体按键选取item,但是LVGL 的V8.3中没有像Emwin那样有函数选择list item的函数。LVGL中List引入了Group的概念,把列表项都添加到同一个group中。然后通过更…...
数据结构 模拟实现二叉树(孩子表示法)
目录 一、二叉树的简单概念 (1)关于树的一些概念 (2)二叉树的一些概念及性质 定义二叉树的代码: 二、二叉树的方法实现 (1)createTree (2)preOrder (…...

Android14之解决刷机报错:Can not load Android system. Your data may be corrupt(一百七十七)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 优质专栏:多媒…...

二阶贝塞尔曲线生成弧线
概述 本文分享一个二阶贝塞尔曲线曲线生成弧线的算法。 效果 实现 1. 封装方法 class ArcLine {constructor(from, to, num 100) {this.from from;this.to to;this.num num;return this.getPointList();}getPointList() {const { from, to } thisconst ctrlPoint thi…...

FilterQuery过滤查询
ES中的查询操作分为两种:查询和过滤。查询即是之前提到的query查询,它默认会计算每个返回文档的得分,然后根据得分排序。而过滤只会筛选出符合条件的文档,并不计算得分,并且可以缓冲记录。所以我们在大范围筛选数据时&…...
java多线程(并发)夯实之路-线程池深入浅出
线程池 Thread Pool:线程池,存放可以重复使用的线程(消费者) Blocking Queue:阻塞队列,存放等待执行的任务(生产者) poll方法(有时限地获取任务)相对take注…...

数据库-列的类型-字符串char类型
char 和 varchar 类型 char 类型懂得都懂就是固定的字符串类型 char (maxLen) 例如 char(5) 这个长度为5 但插入数据‘a’时 是5 插入abc 也是5 即使插满固定 就像C/C语言里 char 字符数组一样 char str[64]; maxLen255 哈哈最多有255个字符多了我认为你是错误 varchar…...

大话 JavaScript(Speaking JavaScript):第二十一章到第二十五章
第二十一章:数学 原文:21. Math 译者:飞龙 协议:CC BY-NC-SA 4.0 Math对象用作多个数学函数的命名空间。本章提供了一个概述。 数学属性 Math的属性如下: Math.E 欧拉常数(e) Math.LN2 2 …...

ICMP协议
ICMP协议是网络层协议, 利用ICMP协议可以实现网络中监听服务和拒绝服务,如 ICMP重定向的攻击。 一、ICMP基本概念 1、ICMP协议 ICMP是Internet控制报文协议,用于在IP主机、路由器之间传递控制消息,控制消息指网络通不通、主机是…...
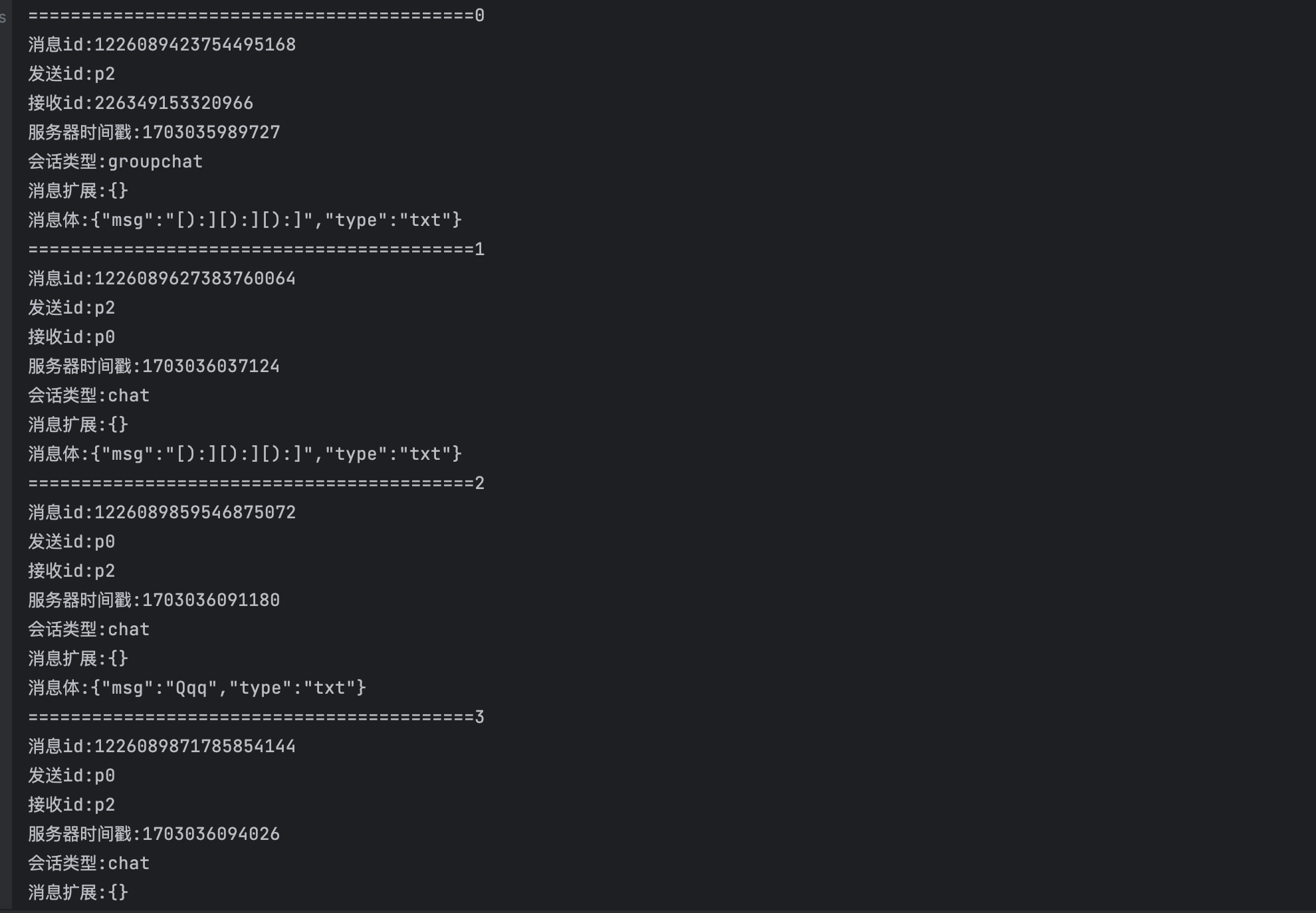
环信服务端下载消息文件---菜鸟教程
前言 在服务端,下载消息文件是一个重要的功能。它允许您从服务器端获取并保存聊天消息、文件等数据,以便在本地进行进一步的处理和分析。本指南将指导您完成环信服务端下载消息文件的步骤。 环信服务端下载消息文件是指在环信服务端上,通过调…...
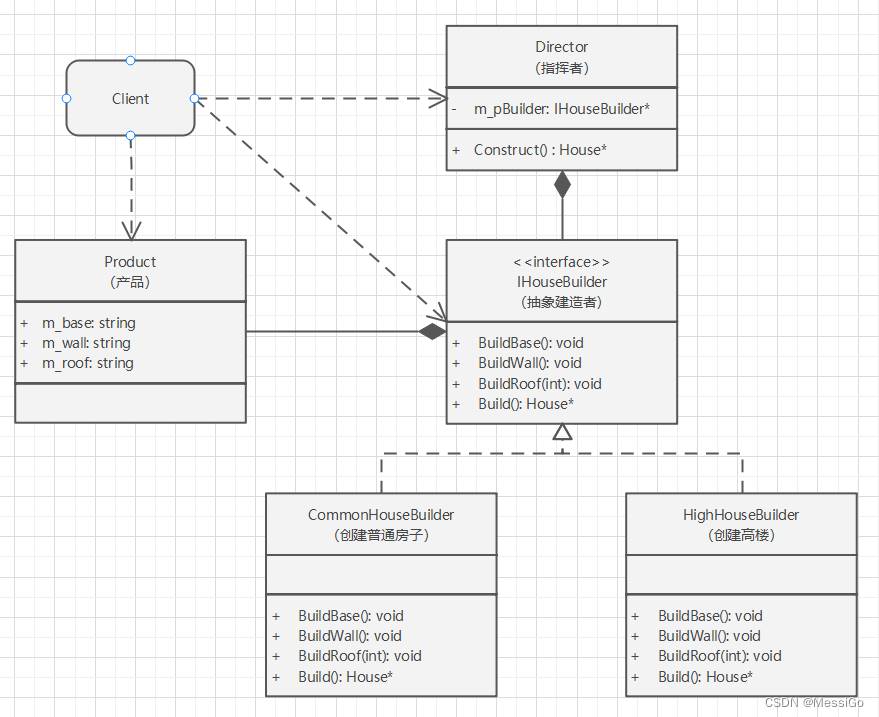
创建型模式 | 建造者模式
一、建造者模式 1、原理 建造者模式又叫生成器模式,是一种对象的构建模式。它可以将复杂对象的建造过程抽象出来,使这个抽象过程的不同实现方法可以构造出不同表现(属性)的对象。创建者模式是一步一步创建一个复杂的对象…...

MVC设计模式
在当今的软件开发领域,MVC(Model-View-Controller)设计模式已经成为了一种广泛使用的架构模式。它为应用程序提供了一种结构化的方法,将数据、用户界面和业务逻辑分开,从而使得应用程序更易于维护、扩展和重用。 一、…...
 ERROR: CreateProcessEntryCommon:493: chdir 错误解决)
WSL (2103) ERROR: CreateProcessEntryCommon:493: chdir 错误解决
[TOC](WSL (2103) ERROR: CreateProcessEntryCommon:493: chdir 错误解决) 1. 错误信息 <3>WSL (2103) ERROR: CreateProcessEntryCommon:493: chdir(/mnt/d/Program Files/PowerShell/7) failed 52. 解决方法 wsl --shutdownwslrefer: https://github.com/microsoft/…...
【二、自动化测试】为什么要做自动化测试?哪种项目适合做自动化?
自动化测试是一种软件测试方法,通过编写和使用自动化脚本和工具,以自动执行测试用例并生成结果。 自动化旨在替代手动测试过程,提高测试效率和准确性。 自动化测试可以覆盖多种测试类型,包括功能测试、性能测试、安全测试等&…...

Linux应用开发之网络套接字编程(实例篇)
服务端与客户端单连接 服务端代码 #include <sys/socket.h> #include <sys/types.h> #include <netinet/in.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <arpa/inet.h> #include <pthread.h> …...

PHP和Node.js哪个更爽?
先说结论,rust完胜。 php:laravel,swoole,webman,最开始在苏宁的时候写了几年php,当时觉得php真的是世界上最好的语言,因为当初活在舒适圈里,不愿意跳出来,就好比当初活在…...
23-Oracle 23 ai 区块链表(Blockchain Table)
小伙伴有没有在金融强合规的领域中遇见,必须要保持数据不可变,管理员都无法修改和留痕的要求。比如医疗的电子病历中,影像检查检验结果不可篡改行的,药品追溯过程中数据只可插入无法删除的特性需求;登录日志、修改日志…...
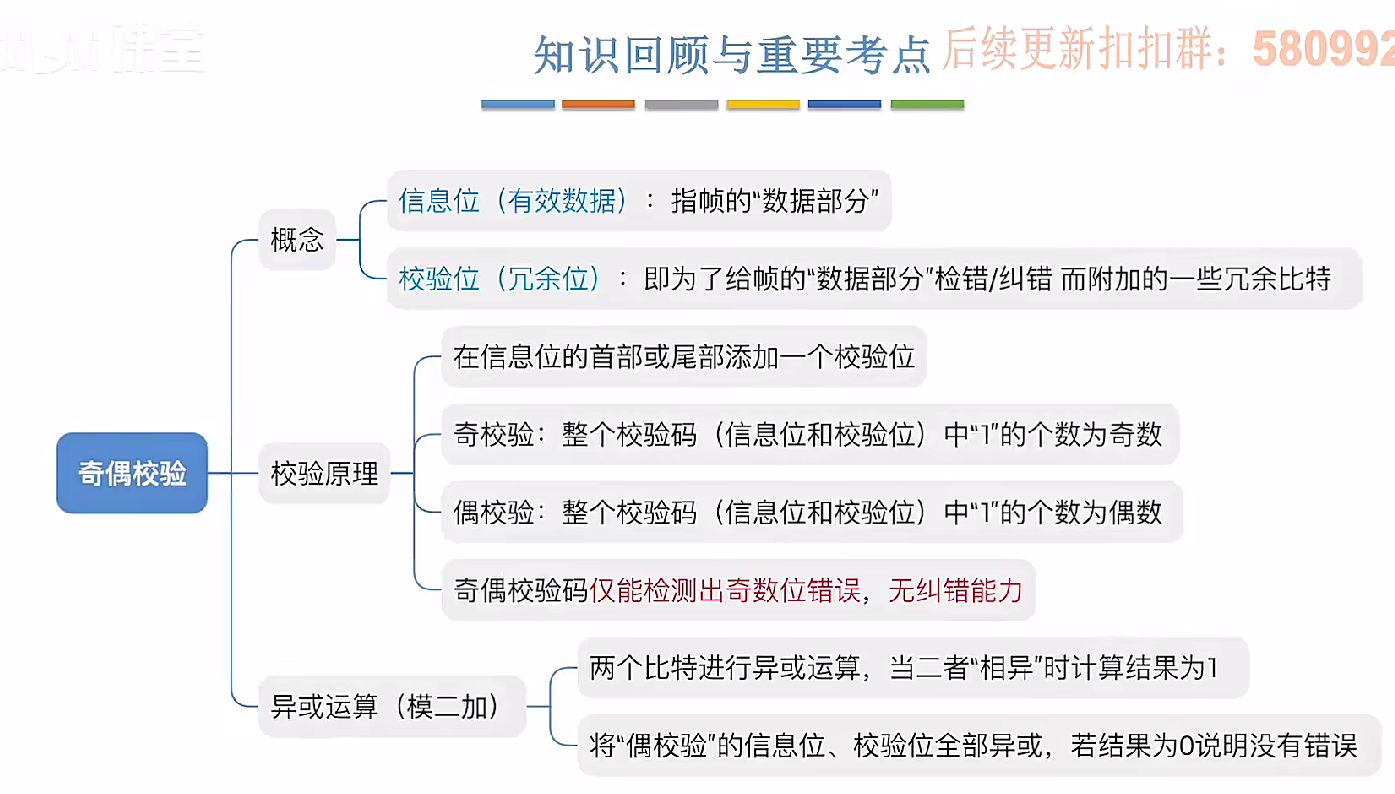
3.3.1_1 检错编码(奇偶校验码)
从这节课开始,我们会探讨数据链路层的差错控制功能,差错控制功能的主要目标是要发现并且解决一个帧内部的位错误,我们需要使用特殊的编码技术去发现帧内部的位错误,当我们发现位错误之后,通常来说有两种解决方案。第一…...
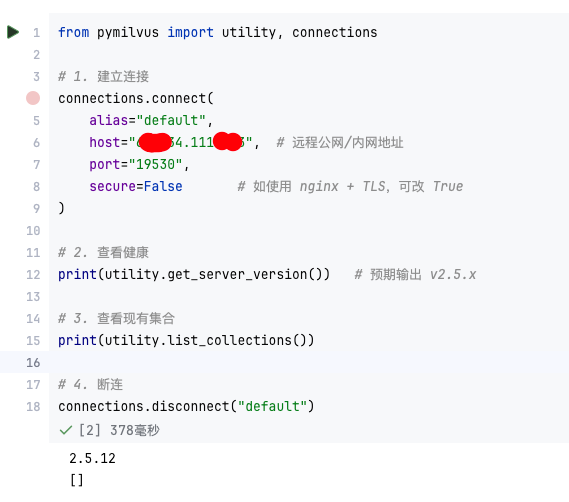
【大模型RAG】Docker 一键部署 Milvus 完整攻略
本文概要 Milvus 2.5 Stand-alone 版可通过 Docker 在几分钟内完成安装;只需暴露 19530(gRPC)与 9091(HTTP/WebUI)两个端口,即可让本地电脑通过 PyMilvus 或浏览器访问远程 Linux 服务器上的 Milvus。下面…...

React Native在HarmonyOS 5.0阅读类应用开发中的实践
一、技术选型背景 随着HarmonyOS 5.0对Web兼容层的增强,React Native作为跨平台框架可通过重新编译ArkTS组件实现85%以上的代码复用率。阅读类应用具有UI复杂度低、数据流清晰的特点。 二、核心实现方案 1. 环境配置 (1)使用React Native…...

五年级数学知识边界总结思考-下册
目录 一、背景二、过程1.观察物体小学五年级下册“观察物体”知识点详解:由来、作用与意义**一、知识点核心内容****二、知识点的由来:从生活实践到数学抽象****三、知识的作用:解决实际问题的工具****四、学习的意义:培养核心素养…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(一)
宇树机器人多姿态起立控制强化学习框架论文解析 论文解读:交大&港大&上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(一) 论文解读:交大&港大&上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化…...

Spring Boot+Neo4j知识图谱实战:3步搭建智能关系网络!
一、引言 在数据驱动的背景下,知识图谱凭借其高效的信息组织能力,正逐步成为各行业应用的关键技术。本文聚焦 Spring Boot与Neo4j图数据库的技术结合,探讨知识图谱开发的实现细节,帮助读者掌握该技术栈在实际项目中的落地方法。 …...

数据库分批入库
今天在工作中,遇到一个问题,就是分批查询的时候,由于批次过大导致出现了一些问题,一下是问题描述和解决方案: 示例: // 假设已有数据列表 dataList 和 PreparedStatement pstmt int batchSize 1000; // …...