仿真机器人-深度学习CV和激光雷达感知(项目2)day03【机器人简介与ROS基础】
文章目录
- 前言
- 机器人简介
- 机器人应用与前景
- 机器人形态
- 机器人的构成
- ROS基础
- ROS的作用和特点
- ROS的运行机制
- ROS常用命令
前言
💫你好,我是辰chen,本文旨在准备考研复试或就业
💫本文内容是我为复试准备的第二个项目
💫欢迎大家的关注,我的博客主要关注于考研408以及AIoT的内容
🌟 预置知识:基本Python语法,基本linux命令行使用
以下的几个专栏是本人比较满意的专栏(大部分专栏仍在持续更新),欢迎大家的关注:
💥ACM-ICPC算法汇总【基础篇】
💥ACM-ICPC算法汇总【提高篇】
💥AIoT(人工智能+物联网)
💥考研
💥CSP认证考试历年题解
机器人简介
机器人应用与前景
生活中的应用:

工业应用:

ROS元老机器人 – PR2:

NASA 将机器人部署到空间站:

智驾成为汽车核心卖点之一:


机器人形态
轮式机器人:

腿式机器人:

轮腿机器人:

无人机:

机械臂:

机器人的构成
• 传感器:机器人的感官,决定了能获取到哪些外部信息。类比人的视觉、触觉、听觉等。
• 算法和逻辑:内部的数据处理。比如用深度学习算法识别物体、传感器融合定位、业务逻辑等。
• 执行器:机器人向外的输出,决定了能完成哪些任务。类比人的手、脚、语言、动作等。

• 机器人是复杂系统,包含一系列协同工作的软件硬件。各个传感器、算法、业务逻辑、执行器之间,有复杂的依赖关系。

ROS基础
ROS的作用和特点
机器人开发的难题
- 组件众多,依赖关系复杂。如何兼顾灵活性、鲁棒性和性能?
- 组件可能由不同语言编写,如何协同运行?
- 某些功能(如建图、导航等)很多机器人都需要有,如何方便的复用?
- 如何调试、记录机器人运行时的大量数据?
ROS的作用-提高软件复用
- 点对点的设计
- 多语言支持
- 丰富的工具包
点对点的设计:
• 分布式的节点单元
• RPC + TCP/UDP 通信系统
• 支持多机器协同(分布式系统)
• 各个节点独立编译、启动
远程过程调用(英语:Remote Procedure Call,RPC)是一个计算机通信协议。该协议允许运行于一台计算机的程序调用另一个地址空间(通常为一个开放网络的一台计算机)的子程序,而程序员就像调用本地程序一样,无需额外地为这个交互作用编程(无需关注细节)。

点对点的设计是ROS中最重要的一个概念,其中关键在于节点。一个系统可能由多个节点构成,我们可以理解成每一个程序都是一个节点,或者说每一个主函数都是一个节点,节点之间是相互独立的,节点和节点之间,不一定运行在同一个物理机器上,它可以是一个分布式的系统,对于分布式系统而言,通信就是重中之重。如上图所示,有三大块,代表着不同的设备:用户电脑,服务器,机器人;其中每一个椭圆都代表着一个节点,他们是可以跑在不同的电脑上的。
比如我给出一个导航任务,简单说明其部分运作流程:在我们的用户电脑上运行一个节点,这个节点用来获取用户的输入,比如输入一个坐标,这就是这个节点的作用,当我们获得了这个输入之后,我们可以把该坐标传递给下一个节点,也就是进行节点间的通信,如上图所示,下一个节点为路径规划算法,它拿到了坐标之后还不够,还需要地图,地图服务器也就另一个节点,这两个节点就不是运行在用户电脑上了,而是运行在服务器上,它们之间就是网络通信,所以即便不在一个机器上,我们也可以通过网络来进行协同的工作,也就是运行在一个分布式系统中。
简而言之,可以理解成为各自都有一个主函数,各自是独立运行的,它们都会去遵循同一个通讯协议,所以说它们之间能够传递信息。这就是ROS的点对点设计。
多语言支持:
• 支持 Python,C++,Java等语言
• 提供语言无关的数据接口定义

所谓语言无关,如上图所示,它是一个Image(图像)的数据格式,我们知道,在cpp中,如果要存储一个图像,可以用数组或者vector来存,但这些东西在Python中是没有的,所谓语言无关的数据定义接口,就是更为抽象的一层,就是用它来标识我这个图像里面有何种信息。
比如上图中有图像的高度、图像的宽度…并且也说明了信息是哪种数据类型,如 uint32, string, uint8...,但这些数据类型并不是具体的某一种语言里面的数据类型,而是ROS提供的一种语言无关的数据类型,在之后编译中会根据不同的语言转换成为对应语言的相应数据类型,ROS帮我们实现了其中的数据转换
丰富的工具包:
• 3D数据可视化:Rviz
• 物理环境仿真:Gazebo
• Qt可视化工具箱:rqt_*

以上工具包我们很快就会用到,先简单略过
ROS的运行机制
ROS机制-计算图
• 节点:软件模块,可以订阅/发布 Topic,调用/创建 Service
• ROS Master:控制中心,整个系统有且只有一个。负责链接各个节点、管理参数等
• Topic:异步通信,传输消息
• Service:同步通信,类似函数调用
我们说过,最重要的就是点对点通信,这是如何实现的呢?下作介绍:
先来补充一个概念:计算图,上面提到的图:

也可以看做成一个计算图。
下面我们拿下图举例:

该图中的每一个椭圆都是ROS rqt_*的工具箱自动生成的,一些节点之间的通信关系可以自动的生成这样的图来给我们查看,每个椭圆都是一个节点,一个箭头就代表着他们之间有一个消息的通信。
已经讲过,每一个椭圆都代表着一个节点,每一个节点都可以订阅或者发布一个 Topic,也可以调用或者创建一个 Service,下面分别介绍 Topic 与 Service:
Topic 和 Service 都是节点之间的通讯方式
• Topic:
是一种传输信息的异步通信

Publisher就是Topic的发布者,如上图所示,Topic的名字(example),它会有一个数据类型(String),这里就是语言无关的数据类型,它会有一些 Subscriber 也就是接收者(可以有多个接收者),这些接收者只需要订阅了名字为 example 的这个 Topic,它就与 Publisher 建立连接了,此后 Publisher 每次发送消息,Subscriber 都会收到,即其实是一个单向的连接,该连接是异步的,也就是 Publisher 发出去就发出去了,至于 Subscriber 收到与否,处理速度的快慢,有没有及时收到,都不会给 Publisher 进行反馈,类似一种广播。
• Service:
类似函数调用,是一种同步通信

和我们请求服务器一样,它有一个 Service Server,有一个 Service Client,Client 发送请求,然后 Server 再返回请求,是一个同步的通信模式。
ROS机制-Topic
• 指定名称和数据类型
• 创建流程
- Talker、Listener 向 Master 注册(发布/订阅哪个Topic)
- Master 向 Listener 发送 Talker 信息
- Listener 向 Talker 建立网络连接
- Talker 向 Listener 发布数据
• 一个 Topic 可以有多个发布者,也可以有多个订阅者。如多个节点都可以向“警告” Topic 发布信息;定位节点和路径规划节点同时订阅“地图”Topic
• 同一个 Topic 的所有发布和订阅,都要用同一种数据类型

继续介绍一下建立一次 Topic 的通信流程:
首先,我们要指定这个 Topic 的名称和数据类型,这两个是必须要定义的,假设有一个 Talker 一个 Listener,其实就是上述中的 Publisher 和 Subscriber,它们会向 ROS Master 进行注册,也就是上述的全局唯一的控制节点,Talker 会告诉 Master,现在想要接收一个 Topic 并且告诉这个 Topic 叫什么以及数据类型是什么,Master 会记住这些信息,当它收到 Listener 向它发布的请求,即想要获得哪个 Topic 的时候,如果 Topic 已经存在,如已有一各 Talker 发布了,Master 会把 Talker 的信息发送给 Listener,此时 Listener 就知道了 Talker 的信息,如知道了 Talker 的 IP 地址,端口号是什么,Listener 就可以主动地去联系 Talker,告诉我要订阅你发布的 Topic,同时 Talker 也会记下来 Listener,这样下一次 Talker 发布数据的时候就会直接把数据传递给 Listener。对于同一个 Topic,所有的发布和订阅都必须用同一种数据类型,不然的话就会报错:Master 会告诉你,这个 Topic 不是这个类型的,并拒绝你的请求。
每个 Topic 可以有多个发布者 Talker(Publisher),也可以有多个订阅者 Listener(Subscriber),多个订阅者是比较常见的,举一个多个发布者的例子:系统中可能有一个 Topic 叫警告,触发警告可能有多种:温度过高,速度过快…,有的节点是用来测量温度的,有的节点是用来测量速度的,那么这些节点都可以向警告这个 Topic 发布信息。
多个订阅者的例子:比如 地图Topic,它可以同时被定位和路径规划的节点所订阅。
ROS机制-Service
• 指定名称和 Service 类型,Service 类型中指定了调用数据类型和返回数据类型
• 调用流程
- Talker 向 Master 注册 Service
- Listener 向 Master 请求 Service
- Master 向 Listener 发送 Talker 信息
- Listener 向 Talker 请求 Service,传递调用参数
- Talker 返回数据

首先也是要指定,指定名称和 Service 类型,注意 Service 类型,因为它是有来有回的,一次调用就是一个过程,不像 Topic,只要建立了连接,每一次talker有新的数据,都会发送给 Listener(Topic :假如 talker 是一个摄像头,帧率是三十帧每秒,那么一旦有了一个 Listener,就会以每秒 30次的速率向 Listener 发送信息;Service :只是一次调用过程)
一个调用的数据类型就类似于函数的一个参数,与此还会有一个返回数据类型即返回值,这两个一起组成了一个 Service 类型
调用流程与 Topic 类似,首先是注册,Talker 也就是 Service Server,Listener 也就是 Service Client,它们在创建的时候都需要向 Master 注册,Master 就会记住,谁定义了哪个 Service,谁要请求哪个 Service,当有请求的时候,Master 会向 Listener 发送 Talker 的信息,Listener 就知道了 Talker 的信息,就可以直接和 Talker 建立通信,来完成一次请求。
可以把 Service 类比为函数调用,一次调用就是传入一次参数,返回一次数据。Service 主要作用并不是传递数据,而是触发/调用某些逻辑之类的作用
| 话题 Topic | 服务 Service | |
|---|---|---|
| 同步性 | 异步 | 同步 |
| 通信模型 | 发布/订阅 | 服务器/客户端 |
| 底层协议 | ROSTCP/ROSUDP | ROSTCP/ROSUDP |
| 反馈机制 | 无 | 有 |
| 缓冲区 | 有 | 无 |
| 实时性 | 弱 | 强 |
| 节点关系 | 多对多 | 一对多(一个 Service Server) |
| 适用场景 | 数据传输 | 逻辑处理 |
ROS机制-参数
- Talker 向 Master 设置参数
- Master 存储参数
- Listener 向 Master 查询参数
- Master 返回参数

ROS机制-文件系统
•xxx_ws:工作空间根目录,项目的基本单位
•xxx_ws/src:各种代码存放位置,我们只需要修改src中的文件
• xxx_ws/build 和 xxx_ws/devel:编译生成的文件夹,存放目标文件、依赖项等,开发时一般不用管
• src中每个功能包:
- package.xml:功能包的元数据(名称、版本、作者、依赖项等)
- CMakeLists.txt:编译配置文件
- 其他可选文件夹(src, msg, srv, launch等)

ROS常用命令
| 命令 | 作用 |
|---|---|
| catkin_create_pkg | 创建功能包 |
| rospack | 获取功能包的信息 |
| catkin_make | 编译工作空间的功能包 |
| rosdep | 自动安装功能包依赖的其他包 |
| roscd | 功能包目录跳转 |
| roscp | 拷贝功能包中的文件 |
| rosed | 编译功能包中的文件 |
| rosrun | 运行功能包中的可执行文件 |
| roslaunch | 运行启动文件 |
加 -h 参数查看帮助,如 rosrun -h
上述所有内容出处如下,博主在此基础上仅为添加个人理解:
本项目为北大团队出品【项目三:深度学习&仿真机器人 - 丘丘老师】原创(部分代码为开源代码)。课程团队:B站ID【M学长的考研top帮】UID【3546580235848566】复试项目班QQ大群:885884619,负责人QQ:674799975
相关文章:
仿真机器人-深度学习CV和激光雷达感知(项目2)day03【机器人简介与ROS基础】
文章目录 前言机器人简介机器人应用与前景机器人形态机器人的构成 ROS基础ROS的作用和特点ROS的运行机制ROS常用命令 前言 💫你好,我是辰chen,本文旨在准备考研复试或就业 💫本文内容是我为复试准备的第二个项目 💫欢迎…...

【多商户开源-BSD- Fecmall 电商平台】
关于Fecmall Fecmall 关于,Fecmall介绍 Fecbbc开源BSD多商户系统,真正开源,商用免费授权的多商户系统 Fecmall系统简介: 全称为Fancy ECommerce Shop, 着重于电商架构的研发优化,全新定义商城的架构体系&…...
2023春秋杯冬季赛 --- Crypto wp
文章目录 前言Cryptonot_wiener 前言 比赛没打,赛后随便做一下题目 Crypto not_wiener task.py: from Crypto.Util.number import * from gmpy2 import * import random, os from hashlib import sha1 from random import randrange flagb x bytes_to_long(f…...

ImageMagick使用手册
ImageMagick使用手册 文章目录 ImageMagick使用手册ImageMagick是什么指令总结1.查看版本2.官网验证指令解读3.svg转png4.png转ico5.将指定文件夹中的所有PNG图像转换为ICO图标 本教程持续更新,我学到多少就更新多少。关于ffmpeg如何安装可以看上一篇博客win系统环境…...
-C++和QT编程第五天-Qt编程技巧若干解答(物联技术666))
嵌入式培训机构四个月实训课程笔记(完整版)-C++和QT编程第五天-Qt编程技巧若干解答(物联技术666)
链接:https://pan.baidu.com/s/1-u7GvgM0TLuiy9z7LYQ80Q?pwd1688 提取码:1688 QT在Windows下制作图表 QT是跨平台的程序设计库,在windows下的程序往往想要有一个好看的图标,方法如下: 1.准备个ICO图标。例如&…...
【蓝桥杯选拔赛真题59】python小写字母 第十五届青少年组蓝桥杯python 选拔赛比赛真题解析
目录 python小写字母 一、题目要求 1、编程实现 2、输入输出...

代码随想录算法训练营Day37|738.单调递增的数字、贪心算法总结
目录 738.单调递增的数字 方法一:暴力解法 方法二:贪心解法 贪心算法总结 738.单调递增的数字 题目链接 文章链接 方法一:暴力解法 class Solution { private:// 各位递增判断函数bool checkNum(int num) {int max 10;while (num) {int …...

笔记-影响力-对比,互惠,赌徒原理
笔记 From 《影响力》 目录 C1 影响力的武器 C2:互惠 C3 承诺和一致 C4:社会认同 C5:喜好 C6:权威 C7:稀缺 Ankie的笔记:对比,互惠,赌徒原理 C1 影响力的武器 人类在认知方面有个原理,叫“对比原理”。 假设有人走进一…...
之间的转换)
PIL、cv2、numpy,和pytorch(torch)之间的转换
在图像处理和深度学习中,经常需要在PIL(Python Imaging Library)、OpenCV(cv2)、NumPy和PyTorch之间进行图像数据的转换。下面是这些库之间常见的转换方法。 1. PIL和numpy之间的转换 import numpy as np from PIL i…...

Java面试题50道
文章目录 1.谈谈你对Spring的理解2.Spring的常用注解有哪些3.Spring中的bean线程安全吗4.Spring中的设计模式有哪些5.Spring事务传播行为有几种6.Spring是怎么解决循环依赖的7.SpringBoot自动配置原理8.SpringBoot配置文件类型以及加载顺序9.SpringCloud的常用组件有哪些10.说一…...

电脑怎么剪辑视频?这些软件不可错过
电脑怎么剪辑视频?随着视频时代的到来,越来越多的人开始涉足视频制作。从Vlog到短片,再到专业级的影视作品,视频已经成为了我们生活中不可或缺的一部分。那么,如何才能快速掌握视频剪辑技巧,制作出令人惊叹…...

HBase学习七:Compaction
1、简介 Compaction是从一个Region的一个Store中选择部分HFile文件进行合并。其目的为了减少 HFile 的个数跟清理掉过期和删除的数据。 合并原理是,先从这些待合并的数据文件中依次读出KeyValue,再由小到大排序后写入一个新的文件。之后,这个新生成的文件就会取代之前已合…...
MySQL定期整理磁盘碎片
MySQL定期整理磁盘碎片:提升数据库性能的终极指南 MySQL作为一个强大的关系型数据库管理系统,在长时间运行后可能会产生磁盘碎片,影响数据库性能。本博客将深入讨论如何定期整理MySQL磁盘碎片,以确保数据库的高效运行。我们将介绍…...
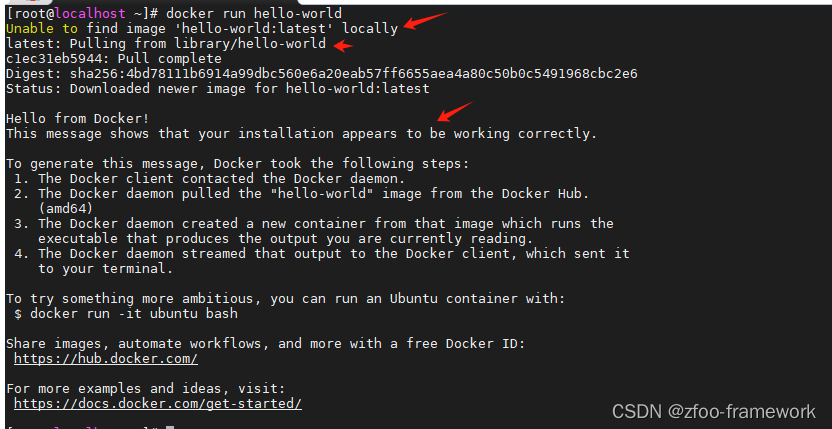
【centos7安装docker】
背景: 学习docker,我是想做一个隔离环境,并且部署的话,希望实现自动化,不为安装软件而烦恼,保证每个人的环境一致。 2C4G内存 50G磁盘的虚拟机事先已经准备完毕。 1.查看下centos版本,docker要…...

四、Flask学习之JavaScript
四、Flask学习之JavaScript JavaScript,作为一种前端脚本语言,赋予网页生动的交互性和动态性。通过它,开发者能够操作DOM(文档对象模型)实现页面元素的动态改变、响应用户事件,并借助AJAX技术实现异步数据…...

IO 专题
使用try-with-resources语句块,可以自动关闭InputStream [实践总结] FileIUtils 共通方法最佳实践 [实践总结] java 获取在不同系统下的换行符 [实践总结] StreamIUtils 共通方法最佳实践 斜杠“/“和反斜杠“\“的区别 路径中“./”、“…/”、“/”代表的含义…...
MySql索引事务讲解和(经典面试题)
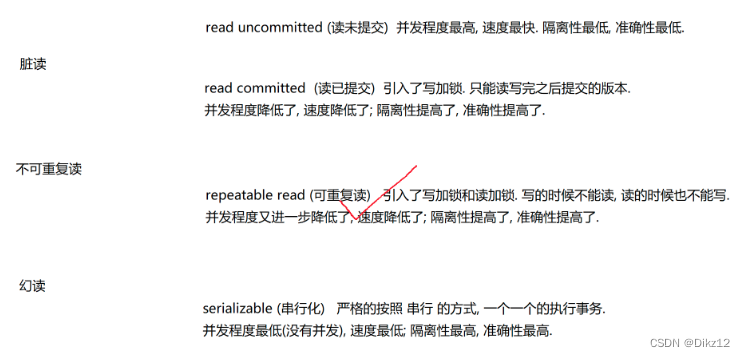
🎥 个人主页:Dikz12🔥个人专栏:MySql📕格言:那些在暗处执拗生长的花,终有一日会馥郁传香欢迎大家👍点赞✍评论⭐收藏 目录 索引 概念 索引的相关操作 索引内部数据结构 事务 为…...

《微信小程序开发从入门到实战》学习九十一
7.1 视图容器组件 7.1.2 scroll-view组件 scroll-view组件时是滚动的视图容器,可在竖直方向或水平方向上滚动,展示超出屏幕高度或宽度的内容。 使用竖直方向滚动时,需要通过wxss的height样式给scroll-view设置一个固定高度,超出…...

【立创EDA-PCB设计基础】6.布线铺铜实战及细节详解
前言:本文进行布线铺铜实战及详解布线铺铜的细节 在本专栏中【立创EDA-PCB设计基础】前面完成了布线铺铜前的设计规则的设置,接下来进行布线 布局原则是模块化布局(优先布局好确定位置的器件,例如排针、接口、主控芯片ÿ…...

Node.JS CreateWriteStream(大容量写入文件流优化)
Why I Need Node.JS Stream 如果你的程序收到以下错误,或者需要大容量写入很多内容(几十几百MB甚至GB级别),则必须使用Stream文件流甚至更高级的技术。 Error: EMFILE, too many open files 业务场景,我们有一个IntradayMissingRecord的补…...

(LeetCode 每日一题) 3442. 奇偶频次间的最大差值 I (哈希、字符串)
题目:3442. 奇偶频次间的最大差值 I 思路 :哈希,时间复杂度0(n)。 用哈希表来记录每个字符串中字符的分布情况,哈希表这里用数组即可实现。 C版本: class Solution { public:int maxDifference(string s) {int a[26]…...
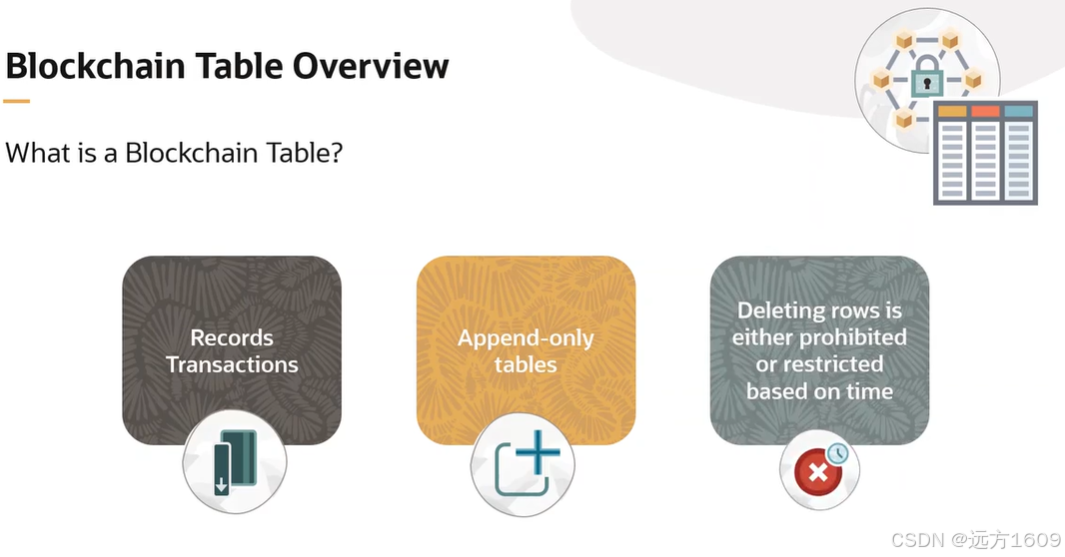
23-Oracle 23 ai 区块链表(Blockchain Table)
小伙伴有没有在金融强合规的领域中遇见,必须要保持数据不可变,管理员都无法修改和留痕的要求。比如医疗的电子病历中,影像检查检验结果不可篡改行的,药品追溯过程中数据只可插入无法删除的特性需求;登录日志、修改日志…...

学校招生小程序源码介绍
基于ThinkPHPFastAdminUniApp开发的学校招生小程序源码,专为学校招生场景量身打造,功能实用且操作便捷。 从技术架构来看,ThinkPHP提供稳定可靠的后台服务,FastAdmin加速开发流程,UniApp则保障小程序在多端有良好的兼…...
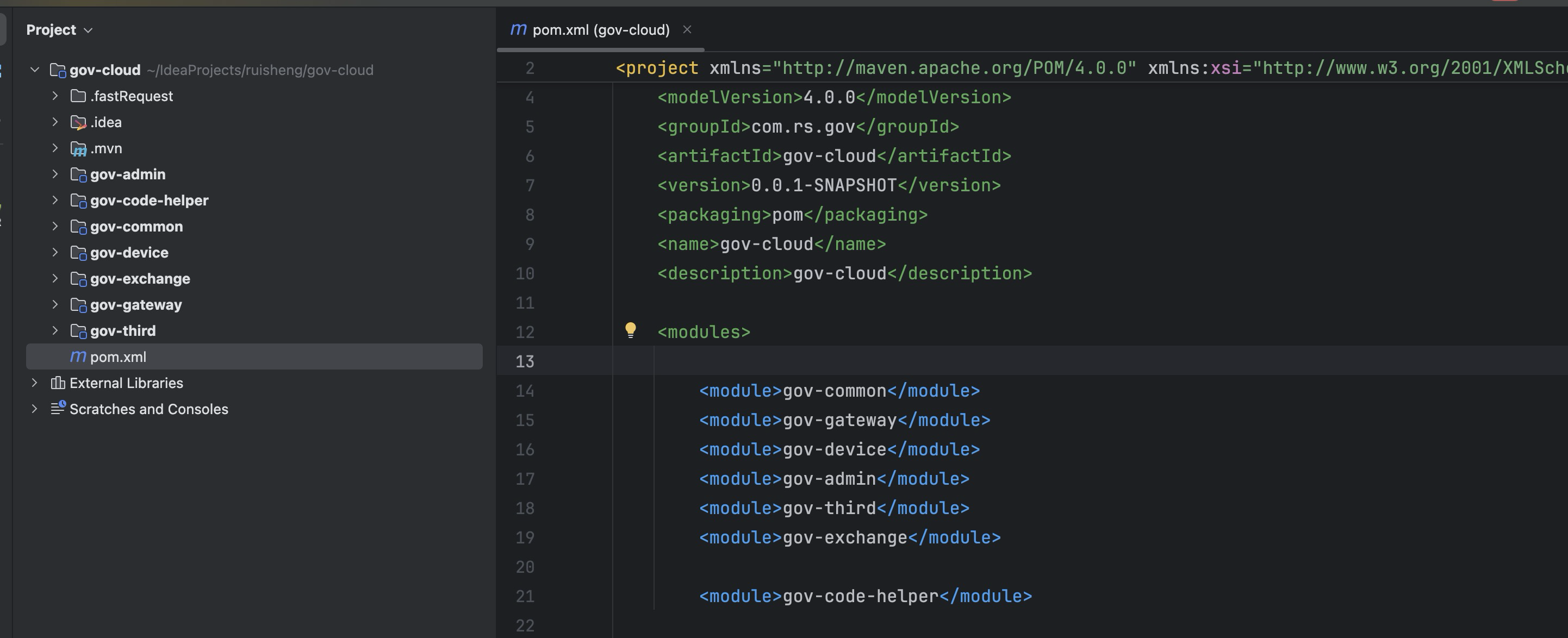
最新SpringBoot+SpringCloud+Nacos微服务框架分享
文章目录 前言一、服务规划二、架构核心1.cloud的pom2.gateway的异常handler3.gateway的filter4、admin的pom5、admin的登录核心 三、code-helper分享总结 前言 最近有个活蛮赶的,根据Excel列的需求预估的工时直接打骨折,不要问我为什么,主要…...

2025盘古石杯决赛【手机取证】
前言 第三届盘古石杯国际电子数据取证大赛决赛 最后一题没有解出来,实在找不到,希望有大佬教一下我。 还有就会议时间,我感觉不是图片时间,因为在电脑看到是其他时间用老会议系统开的会。 手机取证 1、分析鸿蒙手机检材&#x…...

MySQL用户和授权
开放MySQL白名单 可以通过iptables-save命令确认对应客户端ip是否可以访问MySQL服务: test: # iptables-save | grep 3306 -A mp_srv_whitelist -s 172.16.14.102/32 -p tcp -m tcp --dport 3306 -j ACCEPT -A mp_srv_whitelist -s 172.16.4.16/32 -p tcp -m tcp -…...
mac 安装homebrew (nvm 及git)
mac 安装nvm 及git 万恶之源 mac 安装这些东西离不开Xcode。及homebrew 一、先说安装git步骤 通用: 方法一:使用 Homebrew 安装 Git(推荐) 步骤如下:打开终端(Terminal.app) 1.安装 Homebrew…...
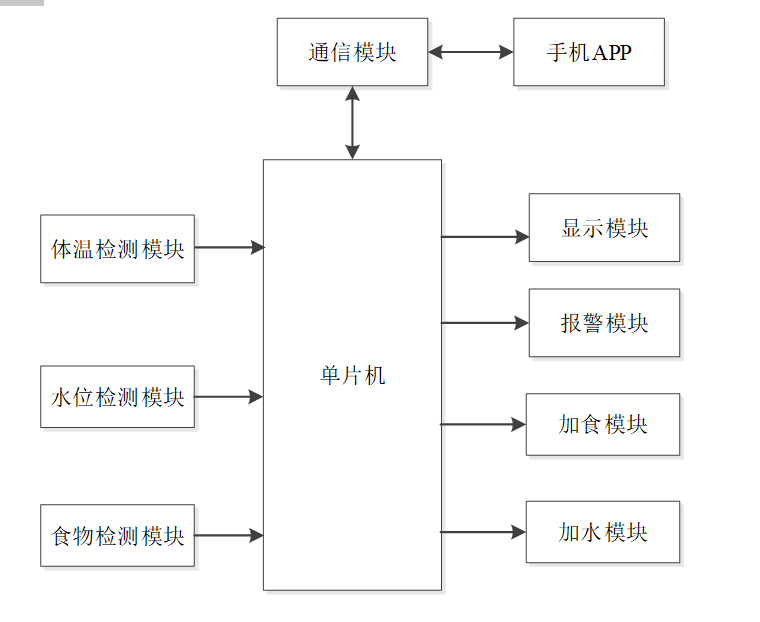
基于单片机的宠物屋智能系统设计与实现(论文+源码)
本设计基于单片机的宠物屋智能系统核心是实现对宠物生活环境及状态的智能管理。系统以单片机为中枢,连接红外测温传感器,可实时精准捕捉宠物体温变化,以便及时发现健康异常;水位检测传感器时刻监测饮用水余量,防止宠物…...

统计按位或能得到最大值的子集数目
我们先来看题目描述: 给你一个整数数组 nums ,请你找出 nums 子集 按位或 可能得到的 最大值 ,并返回按位或能得到最大值的 不同非空子集的数目 。 如果数组 a 可以由数组 b 删除一些元素(或不删除)得到,…...
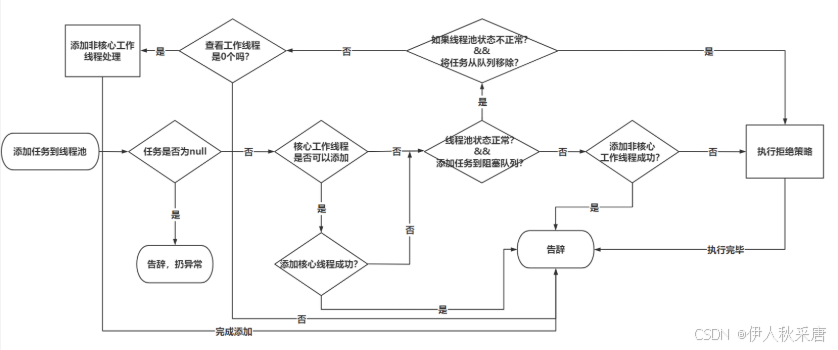
Java多线程从入门到精通
一、基础概念 1.1 进程与线程 进程是指运行中的程序。 比如我们使用浏览器,需要启动这个程序,操作系统会给这个程序分配一定的资源(占用内存资源)。 线程是CPU调度的基本单位,每个线程执行的都是某一个进程的代码的某…...