ROS2 CMakeLists.txt 和 package.xml
这里记录一下ROS2中功能包package.xml和CMakeLists.txt的格式。以LIO-SAM的ROS2版本为例:
一:CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(lio_sam)if(NOT CMAKE_BUILD_TYPE AND NOT CMAKE_CONFIGURATION_TYPES)set(CMAKE_BUILD_TYPE Release)
endif()# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rosidl_default_generators REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rclpy REQUIRED)
find_package(cv_bridge REQUIRED)
find_package(std_msgs REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(nav_msgs REQUIRED)
find_package(visualization_msgs REQUIRED)
find_package(pcl_msgs REQUIRED)
find_package(tf2 REQUIRED)
find_package(tf2_geometry_msgs REQUIRED)
find_package(tf2_sensor_msgs REQUIRED)
find_package(tf2_eigen REQUIRED)
find_package(tf2_ros REQUIRED)
set(OpenCV_STATIC ON)
find_package(OpenCV REQUIRED)
find_package(PCL REQUIRED)
find_package(GTSAM REQUIRED)
find_package(Eigen REQUIRED)
find_package(OpenMP REQUIRED)include_directories(include/lio_sam
)rosidl_generate_interfaces(${PROJECT_NAME} "msg/CloudInfo.msg" "srv/SaveMap.srv" DEPENDENCIES std_msgs sensor_msgs)add_executable(${PROJECT_NAME}_featureExtraction src/featureExtraction.cpp)
ament_target_dependencies(${PROJECT_NAME}_featureExtraction rclcpp rclpy std_msgs sensor_msgs geometry_msgs nav_msgs pcl_msgs visualization_msgs tf2 tf2_ros tf2_eigen tf2_sensor_msgs tf2_geometry_msgs OpenCV PCL)
rosidl_get_typesupport_target(cpp_typesupport_target ${PROJECT_NAME} "rosidl_typesupport_cpp")
target_link_libraries(${PROJECT_NAME}_featureExtraction "${cpp_typesupport_target}") add_executable(${PROJECT_NAME}_imageProjection src/imageProjection.cpp)
ament_target_dependencies(${PROJECT_NAME}_imageProjection rclcpp rclpy std_msgs sensor_msgs geometry_msgs nav_msgs pcl_msgs visualization_msgs pcl_msgs tf2 tf2_ros tf2_eigen tf2_sensor_msgs tf2_geometry_msgs OpenCV PCL)
target_link_libraries(${PROJECT_NAME}_imageProjection "${cpp_typesupport_target}") add_executable(${PROJECT_NAME}_imuPreintegration src/imuPreintegration.cpp)
ament_target_dependencies(${PROJECT_NAME}_imuPreintegration rclcpp rclpy std_msgs sensor_msgs geometry_msgs nav_msgs pcl_msgs visualization_msgs tf2 tf2_ros tf2_eigen tf2_sensor_msgs tf2_geometry_msgs OpenCV PCL GTSAM Eigen)
target_link_libraries(${PROJECT_NAME}_imuPreintegration gtsam "${cpp_typesupport_target}")add_executable(${PROJECT_NAME}_mapOptimization src/mapOptmization.cpp)
ament_target_dependencies(${PROJECT_NAME}_mapOptimization rclcpp rclpy std_msgs sensor_msgs geometry_msgs nav_msgs pcl_msgs visualization_msgs tf2 tf2_ros tf2_eigen tf2_sensor_msgs tf2_geometry_msgs OpenCV PCL GTSAM)
if (OpenMP_CXX_FOUND)target_link_libraries(${PROJECT_NAME}_mapOptimization gtsam "${cpp_typesupport_target}" OpenMP::OpenMP_CXX)
else()target_link_libraries(${PROJECT_NAME}_mapOptimization gtsam "${cpp_typesupport_target}")
endif()install(DIRECTORY launchDESTINATION share/${PROJECT_NAME}/
)install(DIRECTORY configDESTINATION share/${PROJECT_NAME}/
)install(TARGETS ${PROJECT_NAME}_imageProjectionDESTINATION lib/${PROJECT_NAME}
)install(TARGETS ${PROJECT_NAME}_imuPreintegrationDESTINATION lib/${PROJECT_NAME}
)install(TARGETS ${PROJECT_NAME}_featureExtractionDESTINATION lib/${PROJECT_NAME}
)install(TARGETS ${PROJECT_NAME}_mapOptimizationDESTINATION lib/${PROJECT_NAME}
)install(DIRECTORY "include/"DESTINATION include
)ament_export_include_directories(include)if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)# the following line skips the linter which checks for copyrights# uncomment the line when a copyright and license is not present in all source files#set(ament_cmake_copyright_FOUND TRUE)# the following line skips cpplint (only works in a git repo)# uncomment the line when this package is not in a git repo#set(ament_cmake_cpplint_FOUND TRUE)ament_lint_auto_find_test_dependencies()
endif()ament_package()其中:
install
install(TARGETS ${PROJECT_NAME}_mapOptimizationDESTINATION lib/${PROJECT_NAME}
)是将可执行程序 ${PROJECT_NAME}_mapOptimization安装在./install/${PROJECT_NAME}/lib/${PROJECT_NAME}/目录下。
放在别的路径下,启动ros2节点的时候会提示找不到。
ament_target_dependencies
- ament_target_dependencies用于指定ROS2目标级别(target,例如可执行文件或库)的依赖项,包括其他ROS2软件包和库。这个命令会告诉构建系统在构建和运行过程中自动处理这些依赖项,并确保正确地解析和包含所需的头文件。
- target_link_libraries用于指定目标(例如可执行文件或库)所依赖的库。这通常用于非ROS软件包的依赖项,如OpenCV、Boost等。您可以使用它来链接和引入这些库文件。
ament_export_
cmake_minimum_required(VERSION 3.5)
project(slam)if (NOT CMAKE_BUILD_TYPE AND NOT CMAKE_CONFIGURATION_TYPES)set(CMAKE_BUILD_TYPE Release)
endif ()set(CMAKE_CXX_STANDARD 17)
set(CMAKE_EXPORT_COMPILE_COMMANDS ON)set(CMAKE_CXX_FLAGS_RELEASE "-O2")add_subdirectory(mapping)
add_subdirectory(map_manager)# slam是一个总包,内部自己编译libs和binary,根目录下的cmake将编译好的内容导出并安装
ament_export_include_directories(include)
ament_export_libraries(${PROJECT_NAME}.mapping)ament_package()ament_export_dependencies命令将软件包(package)级别导出依赖项。
ament_export_libraries命令将软件包级别所依赖的库导出。
以上导出都是为了别的软件包依赖此软件包时,自动获取此软件包所导出的库和依赖项。
rosidl_generate_interfaces
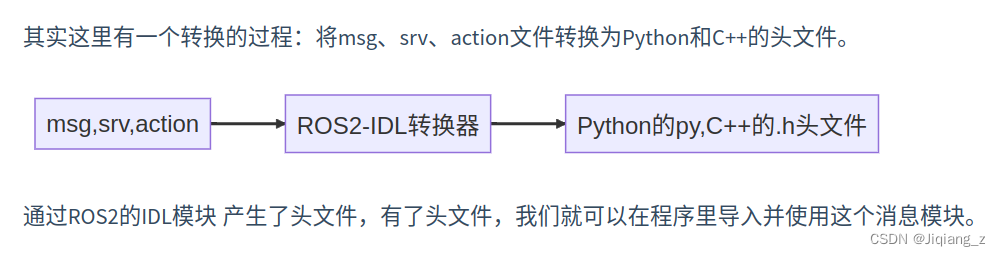
rosidl_generate_interfaces是ROS 2中专门用于生成消息和服务定义文件的函数。它是由ROS 2提供的CMake函数,用于根据接口定义文件生成相应的ROS消息和服务文件。在构建过程中调用。它接受以下参数:
package_name:生成的接口文件将属于的软件包名称。interface_files:一个字符串列表,指定接口定义文件的路径。可以包含消息文件(.msg)和服务文件(.srv)。DEPENDENCIES:一个可选的参数,用于指定接口定义文件中使用的其他ROS消息或服务的依赖项。
需要在packag.xml中添加下面这行命令。
<member_of_group>rosidl_interface_packages</member_of_group> #添加这一行编译完成后在${PROJECT_NAME}_ws/install/${PROJECT_NAME}/include下你应该可以看到C++的头文件。
二:package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>lio_sam</name><version>1.0.0</version><description>Lidar Odometry</description><maintainer email="shant@mit.edu">Tixiao Shan</maintainer><license>TODO</license><author>Tixiao Shan</author><buildtool_depend>ament_cmake</buildtool_depend><buildtool_depend>rosidl_default_generators</buildtool_depend><build_depend>rclcpp</build_depend><build_depend>rclpy</build_depend><build_depend>std_msgs</build_depend><build_depend>sensor_msgs</build_depend><build_depend>nav_msgs</build_depend><build_depend>geometry_msgs</build_depend><build_depend>tf2_geometry_msgs</build_depend><build_depend>tf2_sensor_msgs</build_depend><build_depend>visualization_msgs</build_depend><build_depend>pcl_msgs</build_depend><build_depend>tf2_eigen</build_depend><build_depend>tf2_ros</build_depend><build_depend>tf2</build_depend><build_depend>OpenCV</build_depend><build_depend>PCL</build_depend><build_depend>GTSAM</build_depend><build_depend>Eigen</build_depend><exec_depend>rosidl_default_runtime</exec_depend><exec_depend>rclcpp</exec_depend><exec_depend>rclpy</exec_depend><exec_depend>std_msgs</exec_depend><exec_depend>sensor_msgs</exec_depend><exec_depend>nav_msgs</exec_depend><exec_depend>geometry_msgs</exec_depend><exec_depend>visualization_msgs</exec_depend><exec_depend>pcl_msgs</exec_depend><exec_depend>tf2_geometry_msgs</exec_depend><exec_depend>tf2_sensor_msgs</exec_depend><exec_depend>tf2_eigen</exec_depend><exec_depend>tf2_ros</exec_depend><exec_depend>tf2</exec_depend><exec_depend>OpenCV</exec_depend><exec_depend>PCL</exec_depend><exec_depend>GTSAM</exec_depend><exec_depend>Eigen</exec_depend><member_of_group>rosidl_interface_packages</member_of_group><test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend><export><build_type>ament_cmake</build_type></export>
</package>其中package name应该和CMakeLists中的project name保持一致。
编译报错:
1.cmake_minimum_required
CMake Error at /opt/ros/iron/share/ament_cmake_core/cmake/core/list_append_unique.cmake:30 (if):if given arguments:"NOT" "element" "IN_LIST" "paths_to_search"Unknown arguments specified
Call Stack (most recent call first):/opt/ros/iron/share/ament_cmake_core/cmake/index/ament_index_get_resources.cmake:51 (list_append_unique)/opt/ros/iron/share/rosidl_core_generators/cmake/rosidl_core_generators-extras.cmake:5 (ament_index_get_resources)/opt/ros/iron/share/rosidl_core_generators/cmake/rosidl_core_generatorsConfig.cmake:41 (include)/opt/ros/iron/share/rosidl_default_generators/cmake/ament_cmake_export_dependencies-extras.cmake:21 (find_package)/opt/ros/iron/share/rosidl_default_generators/cmake/rosidl_default_generatorsConfig.cmake:41 (include)CMakeLists.txt:15 (find_package)解决方法:cmake_minimum_required(VERSION 3.0.2) 改成cmake_minimum_required(VERSION 3.5)
相关文章:
ROS2 CMakeLists.txt 和 package.xml
这里记录一下ROS2中功能包package.xml和CMakeLists.txt的格式。以LIO-SAM的ROS2版本为例: 一:CMakeLists.txt cmake_minimum_required(VERSION 3.5) project(lio_sam)if(NOT CMAKE_BUILD_TYPE AND NOT CMAKE_CONFIGURATION_TYPES)set(CMAKE_BUILD_TYPE…...
代码献瑞,算力有礼!低代码开发工具PaddleX特色产线新春福利来啦
回望2023年,飞桨在开发套件能力基础上,充分结合大模型能力,正式在飞桨星河社区上线发布了低代码开发工具PaddleX,实现AI应用开发效果和效率的大幅提升。产品通过提供图形界面开发模式,将复杂的编程任务简化为简单易用的…...

C语言:操作符详解
创作不易,给个三连吧!! 一、算术操作符 C语言中为了方便计算,提供了算数操作符,分别是:,-,*,/,% 由于这些操作符都是有两个操作数(位于操作符两边),所以这种操作符也叫做双目操作…...

Rust 初体验2
变量类型 Rust 语言的变量数据类型,主要包括整型、浮点型、字符、布尔型、元组、数组、字符串、枚举、结构体和可变变量等。 fn main() { // 整型 let integer: i32 100; println!("整型: {}", integer); // 浮点型 let floating_point: f64 3.1…...

vue-cil的watch函数详解
在Vue中,watch是一个非常有用的API,用于侦听一个响应式引用(例如由ref创建)或响应式对象(由reactive创建)的属性,并在值变化时执行回调函数。Vue 3的Composition API引入了这种侦听方式…...

堆排及时间复杂度分析
箴言: 初始阶段,不需要去纠结那一种更优美,非要找出那一种是最好的,其实能解决问题的就是好办法。 一,常见排序时间复杂度 冒泡快排归并堆排桶排时间O(n^2)O(nlogn)O(nlogn)O(nlogn)kn空间O(1)O(1)O(nlogn)O(1)kn 二ÿ…...
数据结构:双向链表
文章目录 1. 双向带头循环链表的结构2. 相关操作2.1 创建节点2.2 尾插2.3 头插2.4 打印2.5 尾删2.6 头删2.7 查找2.8 指定位置前/后插入2.9 删除指定位置的节点2.10 删除指定位置后的节点2.11 销毁链表 3.顺序表与链表区别 1. 双向带头循环链表的结构 与单链表不同的是…...

51单片机之数码管显示表白数字篇
朝菌不知晦朔 蟪蛄不知春秋 眼界决定境界 CSDN 请求进入专栏 是否进入《51单片机专栏》? 确定 目录 数码管的简介 数码管引脚定义 数码管的原理图 74HC245 代码实现 静态数码管的显示 动态数码管的显示 数码管实现表白画面 数码管的简介 L…...
代码随想录算法训练营DAY16 | 二叉树 (3)
一、LeetCode 104 二叉树的最大深度 题目链接:104.二叉树的最大深度https://leetcode.cn/problems/maximum-depth-of-binary-tree/ 思路:采用后序遍历递归求解。 class Solution {int ans 0;public int maxDepth(TreeNode root) {if(root null){retur…...

springboot(ssm大学生计算机基础网络教学系统 在线课程系统Java系统
springboot(ssm大学生计算机基础网络教学系统 在线课程系统Java系统 开发语言:Java 框架:springboot(可改ssm) vue JDK版本:JDK1.8(或11) 服务器:tomcat 数据库:mys…...

前端架构: 脚手架的开发流程和常用框架
脚手架的开发流程 脚手架的创建 $ npm init 脚手架的开发 分包 分包是指当我们一个脚手架比较复杂的时候,不可能把所有的js代码全部写在一个脚手架当中势必会把它建很多的不同的模块 package,通常我们会把它称之为一个分包的过程会和实际的这个项目一样…...
3.0 Hadoop 概念
本章着重介绍 Hadoop 中的概念和组成部分,属于理论章节。如果你比较着急可以跳过。但作者不建议跳过,因为它与后面的章节息息相关。 Hadoop 整体设计 Hadoop 框架是用于计算机集群大数据处理的框架,所以它必须是一个可以部署在多台计算机上…...

mysql 对于null字段排序处理
最近遇到一个需求 ,需要对一个报表的多个字段进行多字段复杂条件排序 排序字段为NULL时 Mysql对于排序字段为NULL时,有自身默认的排序规则,默认是认为null 值 是无穷小 ELECT id,script_id,last_modified,live_count,next_show FROM virtua…...

NLP_语言模型的雏形 N-Gram 模型
文章目录 N-Gram 模型1.将给定的文本分割成连续的N个词的组合(N-Gram)2.统计每个N-Gram在文本中出现的次数,也就是词频3.为了得到一个词在给定上下文中出现的概率,我们可以利用条件概率公式计算。具体来讲,就是计算给定前N-1个词时࿰…...

mac电脑flutter环境配置,解决疑难问题
准备工作 首先搭建flutter的环境需要使用到flutter的sdk,可以直接跳去官网下载:Choose your first type of app - Flutter 中文文档 - Flutter 中文开发者网站 - Flutter,下载时要注意你电脑所使用的芯片是Intel的还是苹果的芯片。 下载好的…...

C++ bool 布尔类型
在C 中 bool类型占用1个字节长度,bool 类型只有两个取值,true 和 false,true 表示“真”,false 表示“假”。 需要注意的C中使用cout 打印的时候是没有true 和 false 的 只有0和1 ,这里0表示假,非0表示真 …...
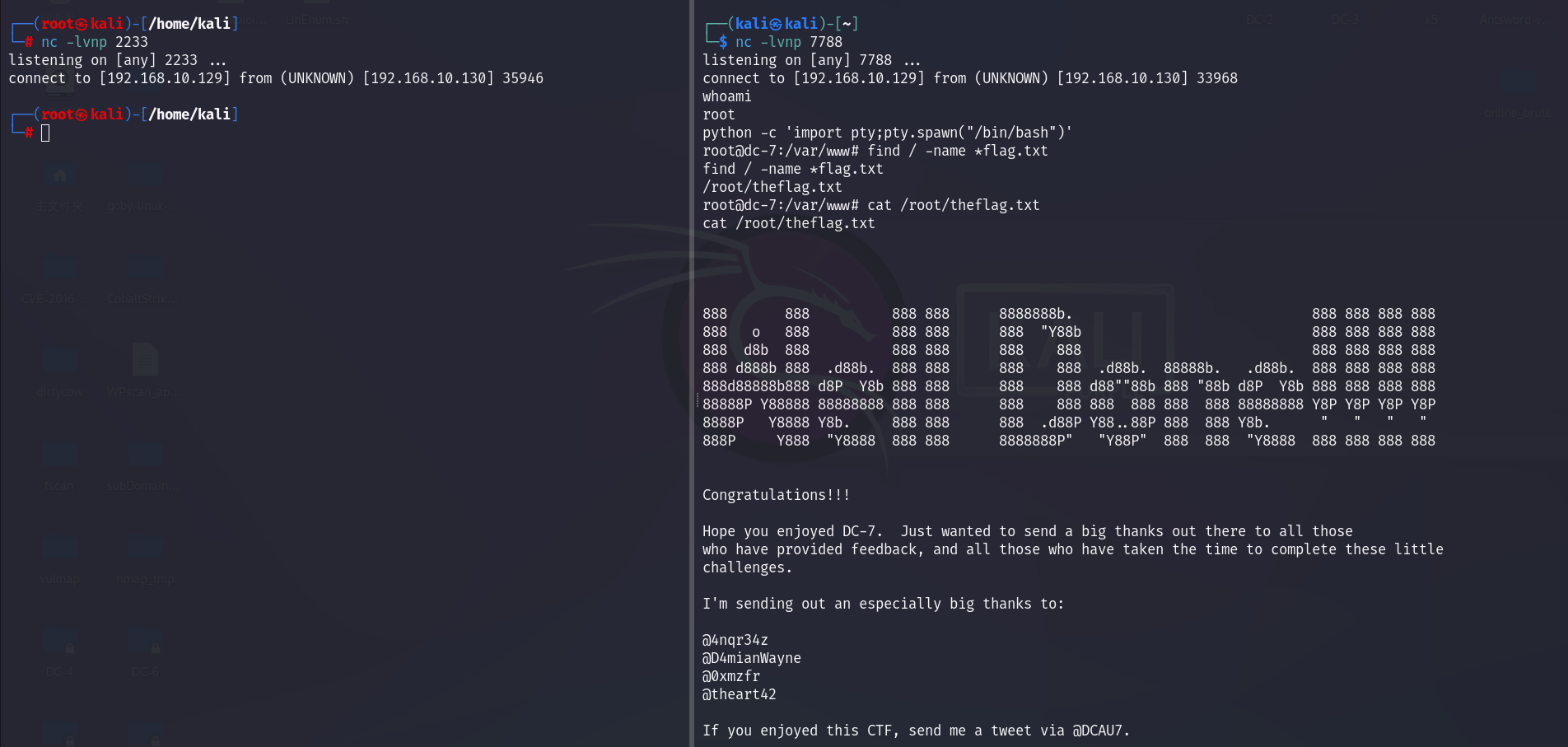
DC-7靶机渗透详细流程
信息收集: 1.存活扫描: 由于靶机和kali都是nat的网卡,都在一个网段,我们用arp-scan会快一点: arp-scan arp-scan -I eth0 -l └─# arp-scan -I eth0 -l Interface: eth0, type: EN10MB, MAC: 00:0c:29:dd:ee:6…...
提速MySQL:数据库性能加速策略全解析
提速MySQL:数据库性能加速策略全解析 引言理解MySQL性能指标监控和评估性能指标索引优化技巧索引优化实战案例 查询优化实战查询优化案例分析 存储引擎优化InnoDB vs MyISAM选择和优化存储引擎存储引擎优化实例 配置调整与系统优化配置调整系统优化优化实例 实战案例…...

Flink实战六_直播礼物统计
接上文:Flink实战五_状态机制 1、需求背景 现在网络直播平台非常火爆,在斗鱼这样的网络直播间,经常可以看到这样的总榜排名,体现了主播的人气值。 人气值计算规则:用户发送1条弹幕互动,赠送1个荧光棒免费…...
 | Scaffold - 脚手架)
Compose | UI组件(十五) | Scaffold - 脚手架
文章目录 前言一、Scaffold脚手架简介二、Scaffold的主要组件三、如何使用Scaffold四、Compose中Scaffold脚手架的具体例子例子1:基本Scaffold布局例子2:带有Drawer的Scaffold布局例子3:带有Snackbar的Scaffold布局 总结 前言 Compose中的Sca…...
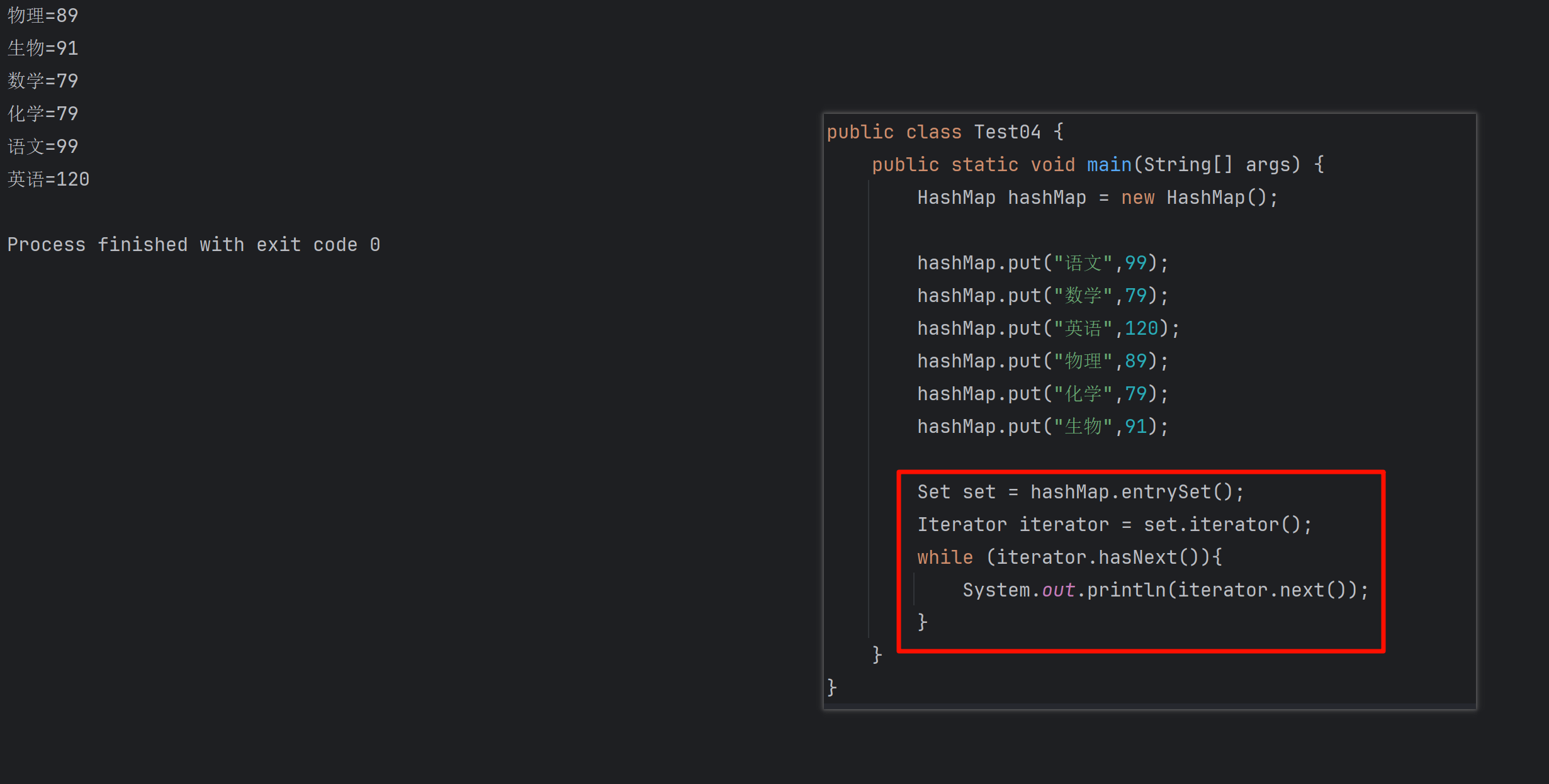
遍历 Map 类型集合的方法汇总
1 方法一 先用方法 keySet() 获取集合中的所有键。再通过 gey(key) 方法用对应键获取值 import java.util.HashMap; import java.util.Set;public class Test {public static void main(String[] args) {HashMap hashMap new HashMap();hashMap.put("语文",99);has…...

关于nvm与node.js
1 安装nvm 安装过程中手动修改 nvm的安装路径, 以及修改 通过nvm安装node后正在使用的node的存放目录【这句话可能难以理解,但接着往下看你就了然了】 2 修改nvm中settings.txt文件配置 nvm安装成功后,通常在该文件中会出现以下配置&…...
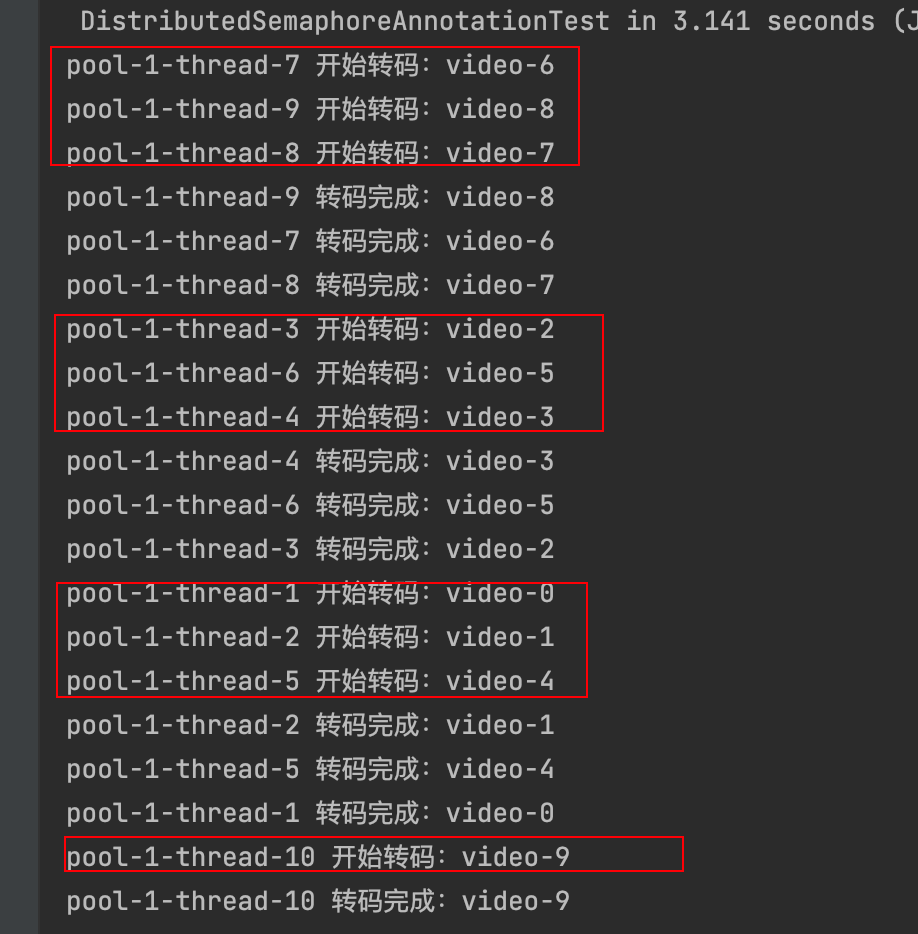
令牌桶 滑动窗口->限流 分布式信号量->限并发的原理 lua脚本分析介绍
文章目录 前言限流限制并发的实际理解限流令牌桶代码实现结果分析令牌桶lua的模拟实现原理总结: 滑动窗口代码实现结果分析lua脚本原理解析 限并发分布式信号量代码实现结果分析lua脚本实现原理 双注解去实现限流 并发结果分析: 实际业务去理解体会统一注…...

什么是EULA和DPA
文章目录 EULA(End User License Agreement)DPA(Data Protection Agreement)一、定义与背景二、核心内容三、法律效力与责任四、实际应用与意义 EULA(End User License Agreement) 定义: EULA即…...
智能仓储的未来:自动化、AI与数据分析如何重塑物流中心
当仓库学会“思考”,物流的终极形态正在诞生 想象这样的场景: 凌晨3点,某物流中心灯火通明却空无一人。AGV机器人集群根据实时订单动态规划路径;AI视觉系统在0.1秒内扫描包裹信息;数字孪生平台正模拟次日峰值流量压力…...

AspectJ 在 Android 中的完整使用指南
一、环境配置(Gradle 7.0 适配) 1. 项目级 build.gradle // 注意:沪江插件已停更,推荐官方兼容方案 buildscript {dependencies {classpath org.aspectj:aspectjtools:1.9.9.1 // AspectJ 工具} } 2. 模块级 build.gradle plu…...

代码随想录刷题day30
1、零钱兑换II 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带…...

Go语言多线程问题
打印零与奇偶数(leetcode 1116) 方法1:使用互斥锁和条件变量 package mainimport ("fmt""sync" )type ZeroEvenOdd struct {n intzeroMutex sync.MutexevenMutex sync.MutexoddMutex sync.Mutexcurrent int…...
Razor编程中@Html的方法使用大全
文章目录 1. 基础HTML辅助方法1.1 Html.ActionLink()1.2 Html.RouteLink()1.3 Html.Display() / Html.DisplayFor()1.4 Html.Editor() / Html.EditorFor()1.5 Html.Label() / Html.LabelFor()1.6 Html.TextBox() / Html.TextBoxFor() 2. 表单相关辅助方法2.1 Html.BeginForm() …...

前端中slice和splic的区别
1. slice slice 用于从数组中提取一部分元素,返回一个新的数组。 特点: 不修改原数组:slice 不会改变原数组,而是返回一个新的数组。提取数组的部分:slice 会根据指定的开始索引和结束索引提取数组的一部分。不包含…...