环境配置:Ubuntu18.04 ROS Melodic安装
前言
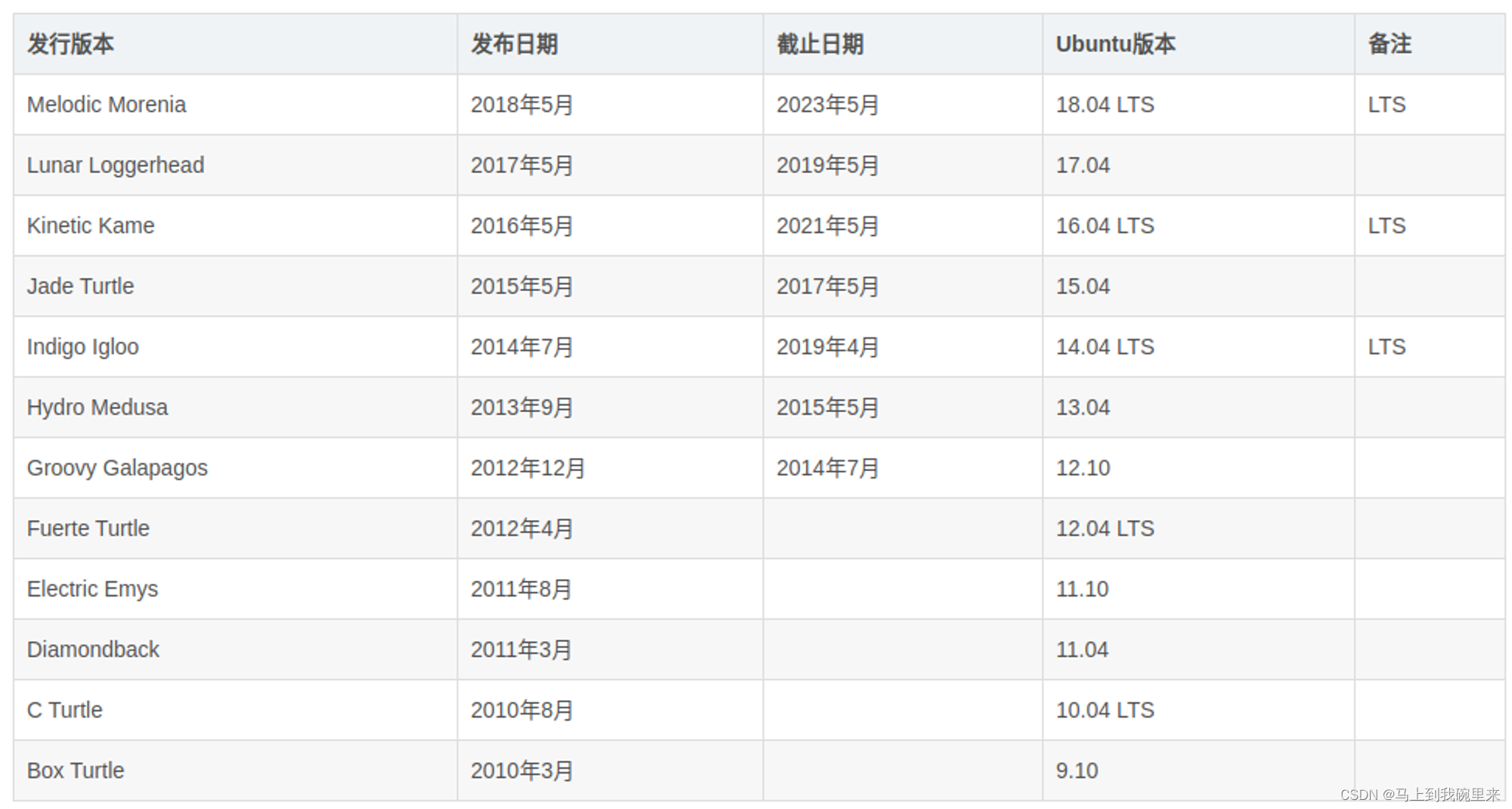
不同版本的Ubuntu与ROS存在对应关系。
ROS作为目前最受欢迎的机器人操作系统,其核心代码采用C++编写,并以BSD许可发布。ROS起源于2007年,是由斯坦福大学与机器人技术公司Willow Garage合作的Switchyard项目。2012年,ROS团队从Willow Garage独立出来,成立了一家非营利组织——开源机器人基金会(Open Source Robotics Foundation, OSRF),并于2013年将ROS移交给该基金会管理。
自2010年3月推出第一个发行版Box Turtle以来,ROS以每年1~2个版本的频率发布多个版本。作为次级操作系统,ROS官方推荐在Ubuntu操作系统上运行,并与Ubuntu发布节奏同步,偶数年发布维护周期为5年的长期演进版本,奇数年发布维护周期为2年的普通版本。然而,在2019年并未发布新版本。ROS已发布的历史版本如表1-1所示。
1 设置安装源
为了安装ROS Melodic,首先需要在Ubuntu 18.04 LTS上添加安装源到source.list,方法如下:
国外的:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

国内的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
清华的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
2 添加秘钥
2.1 添加秘钥
添加秘钥到本地的trusted数据库中并加以验证,方法如下:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
若密钥服务器hkp://ha.pool.sks-keyservers.net:80无法添加成功,则可以尝试hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.com:80。

2.2 安装公钥
在更新之前,需要安装公钥,否则无法验证签名,这一步也是原书没有的,需要朋友们注意,命令如下:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654

3 安装
sudo apt-get update

sudo apt-get install ros-melodic-desktop-full

sudo apt-get install ros-melodic-rqt*

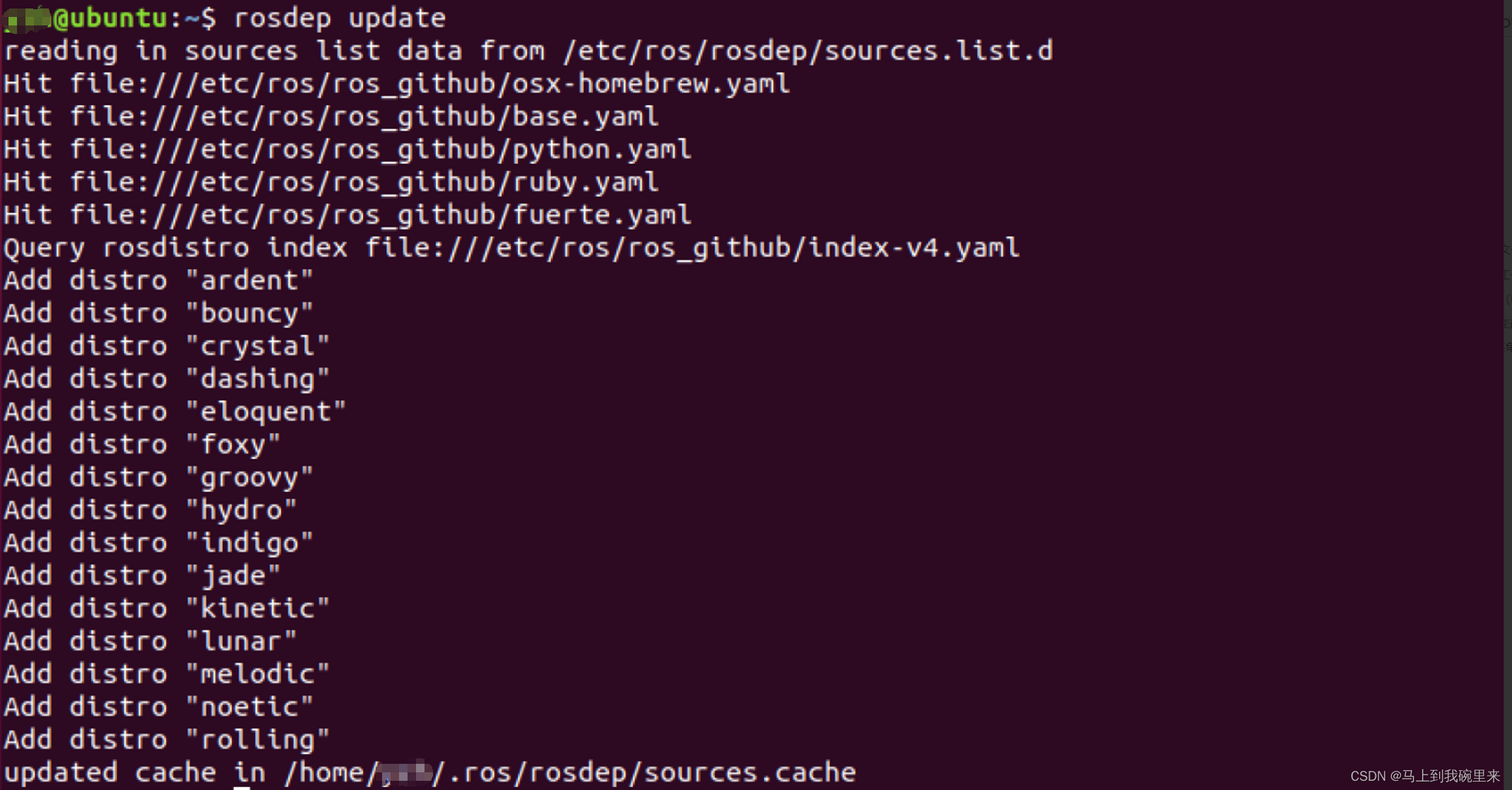
4 初始化rosdep
这一步或多或少因为在国内都会出现网络问题,参考以下文章:
Ubuntu 18.04 安装 ROS Melodic 中 sudo rosdep init 和 rosdep update 一定能成功的方法
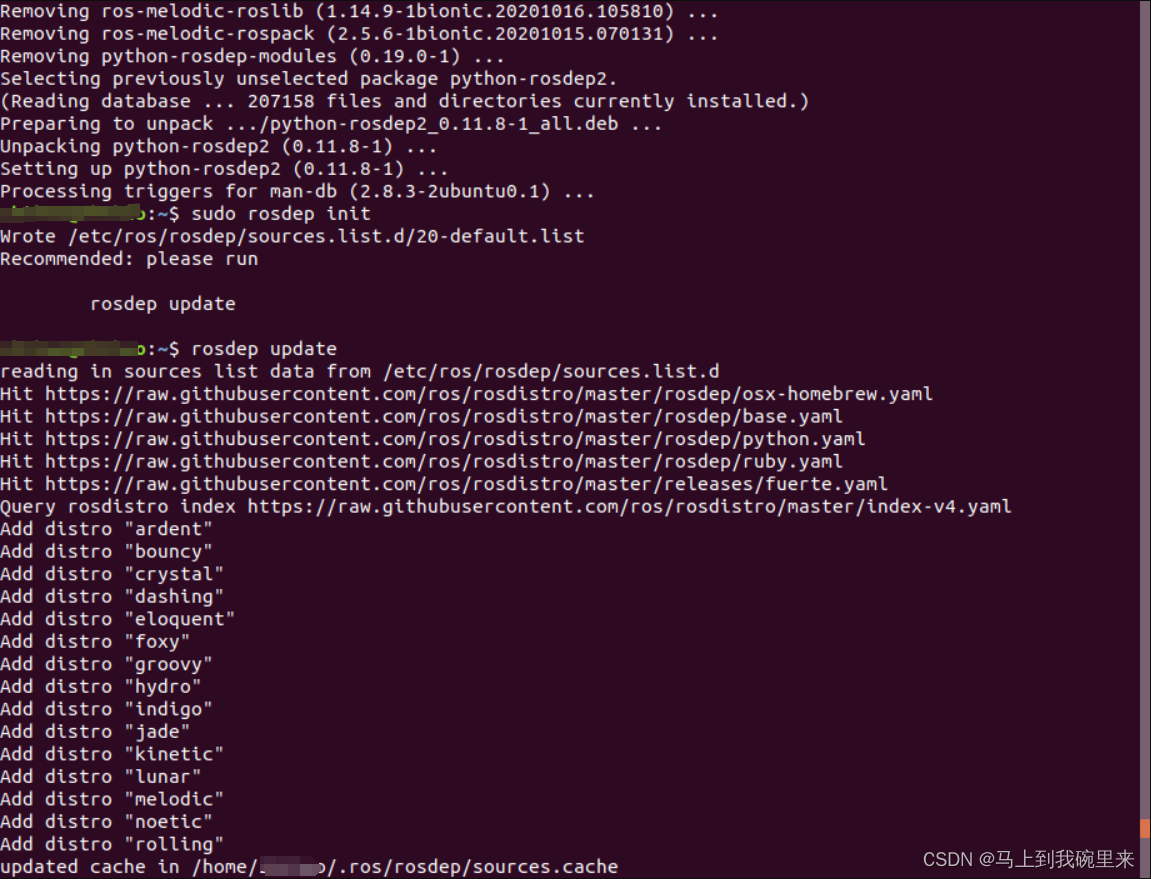
尝试直接科学上网测试也不行,最终不知道怎么的多试了几次就ok了。
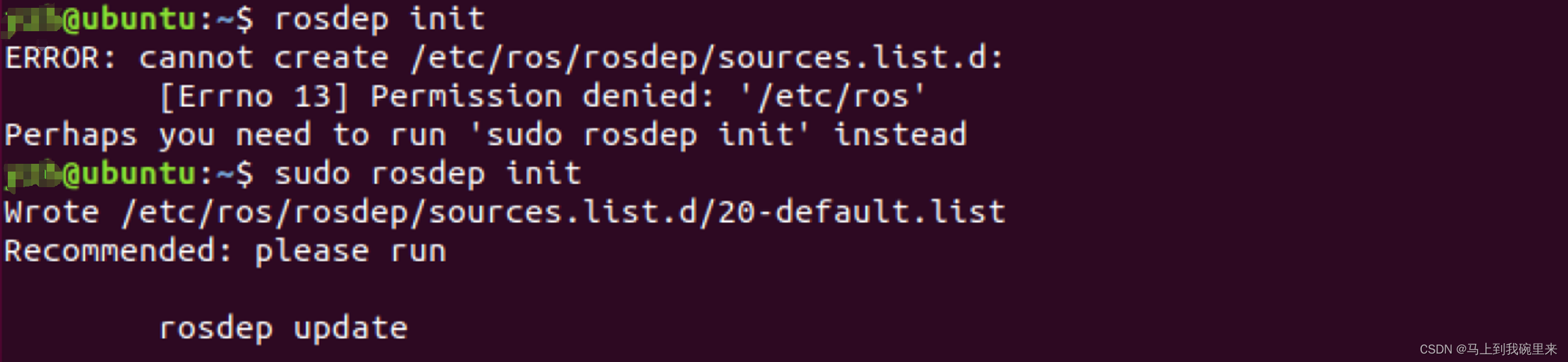
当显示rosdep update就基本成功了,接下来:
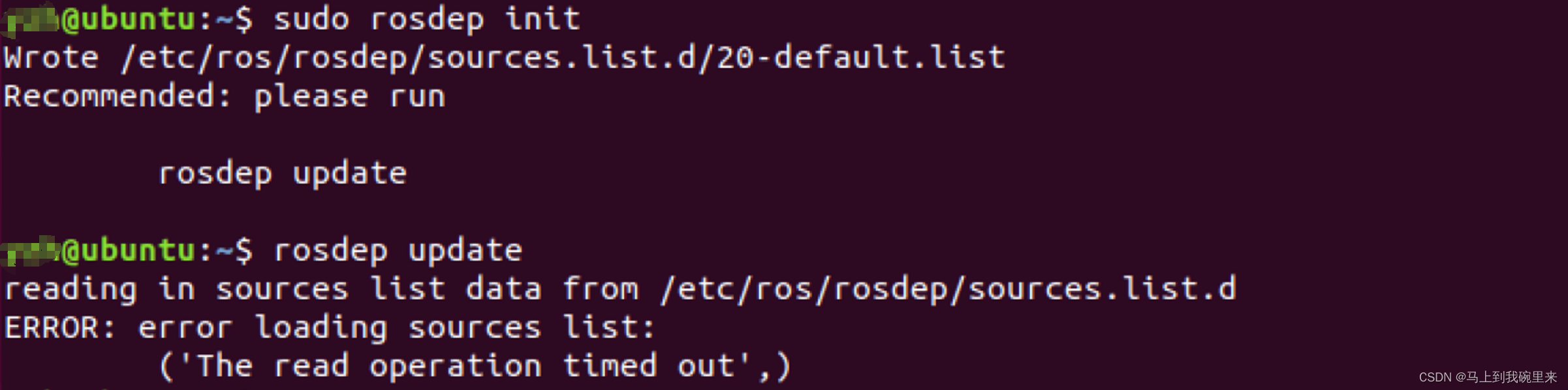
这个错误就是网络问题造成的,理论上换成手机热点就可以。但还是要多试几次。
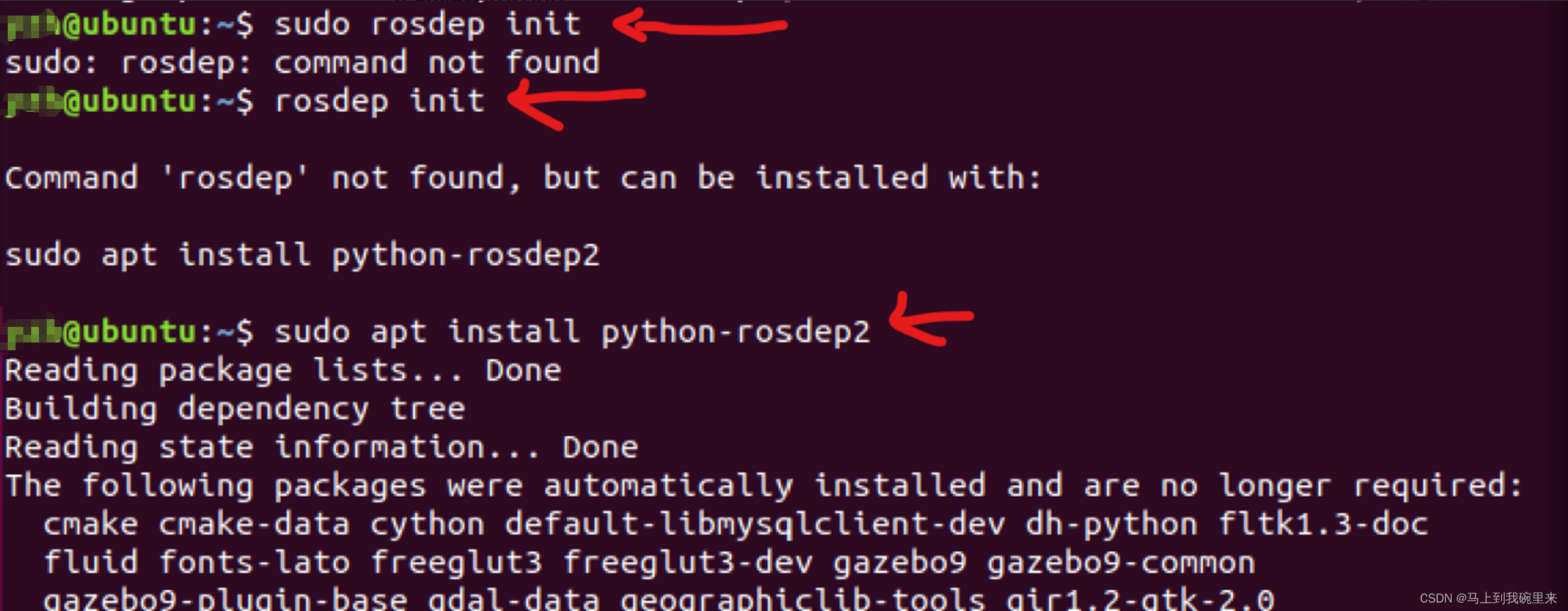
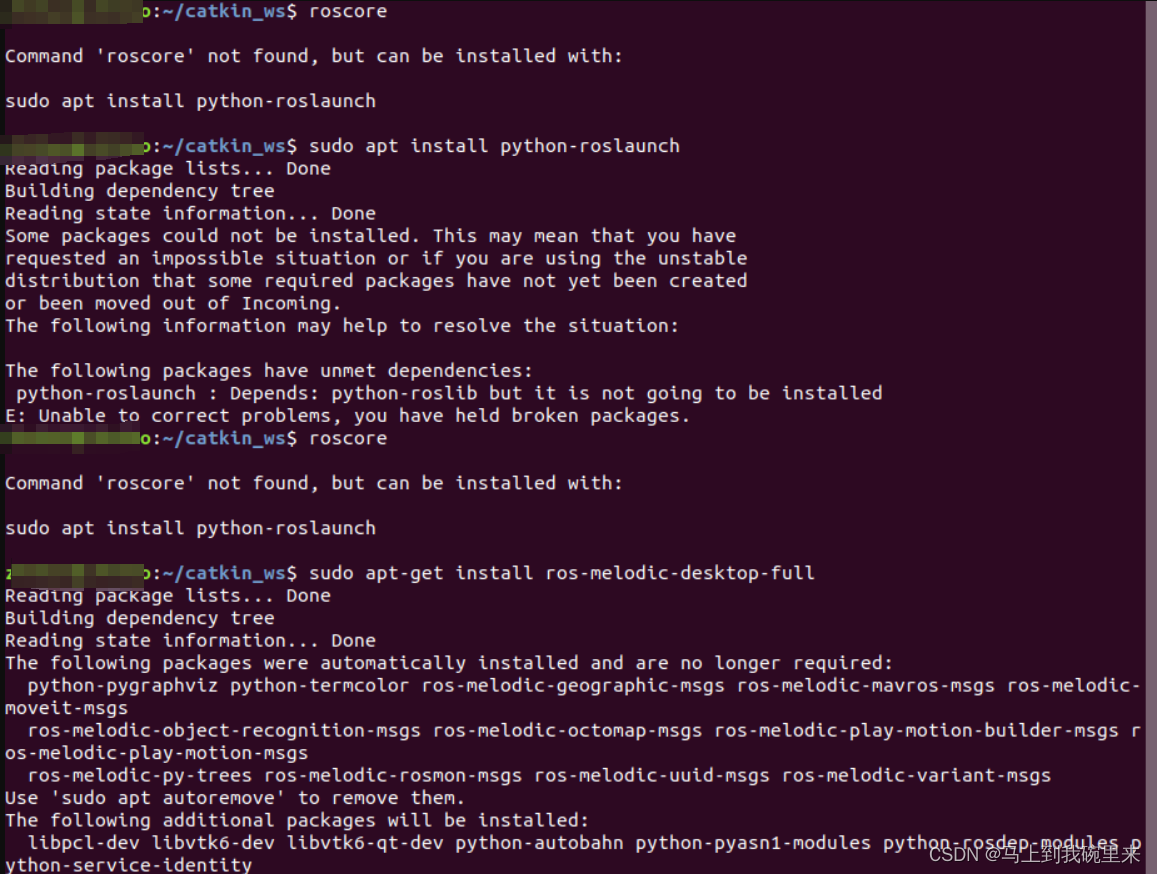
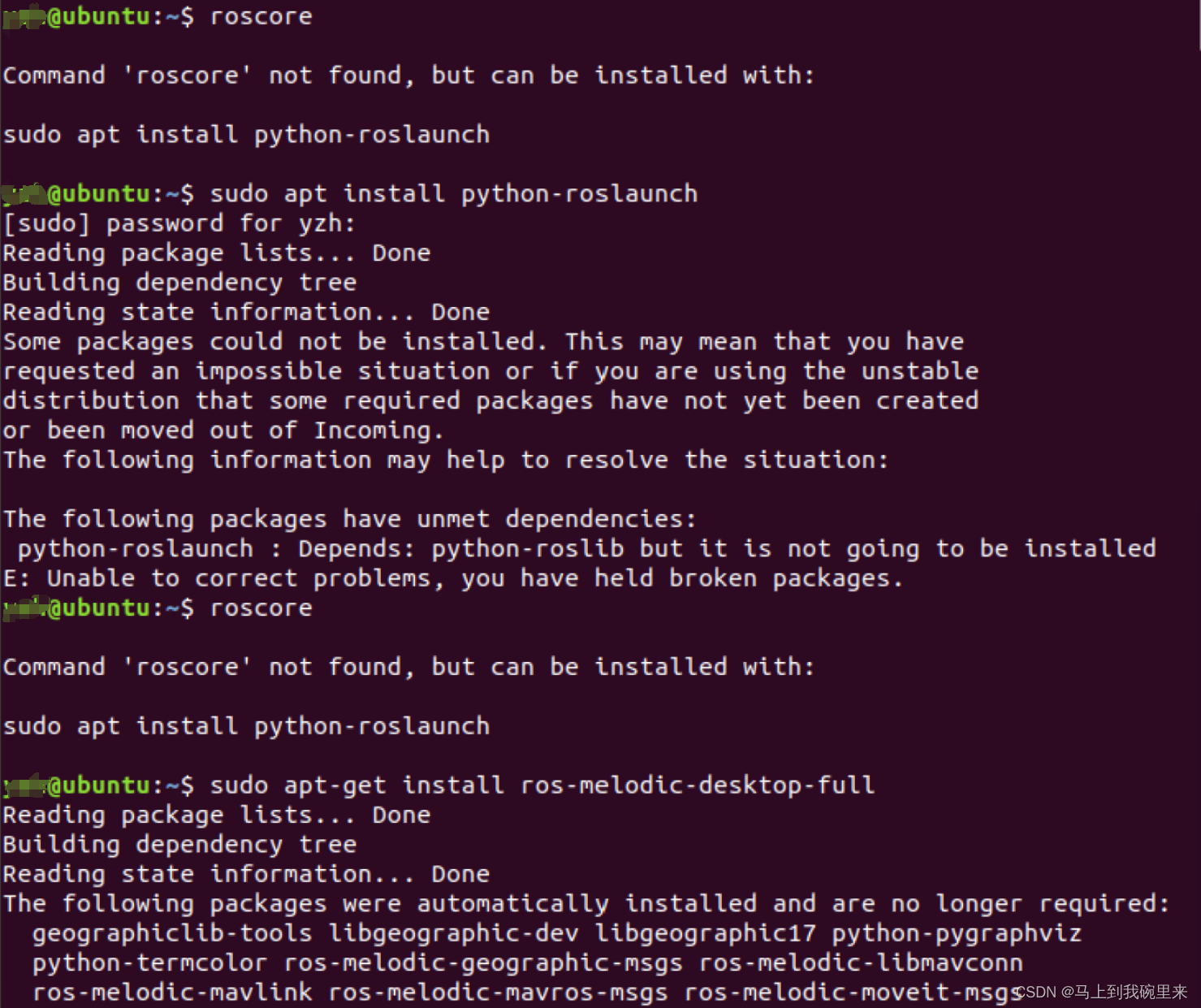
💡 当执行sudo rosdep init,反馈没有该指令。我在网上查找的一个方法是:在终端输入rosdep init,终端提示安装"sudo apt install python-rosdep2 " ,按照提示安装后,确实可以执行sudo rosdep init。但是sudo apt install python-rosdep2会导致之前sudo apt-get install ros-melodic-desktop-full安装的包部分丢失(这是后面才意识到的问题),执行楼主所有步骤后,发现没有roscore这个指令,所以还要重新执行sudo apt-get install ros-melodic-desktop-full,就有roscore指令了。
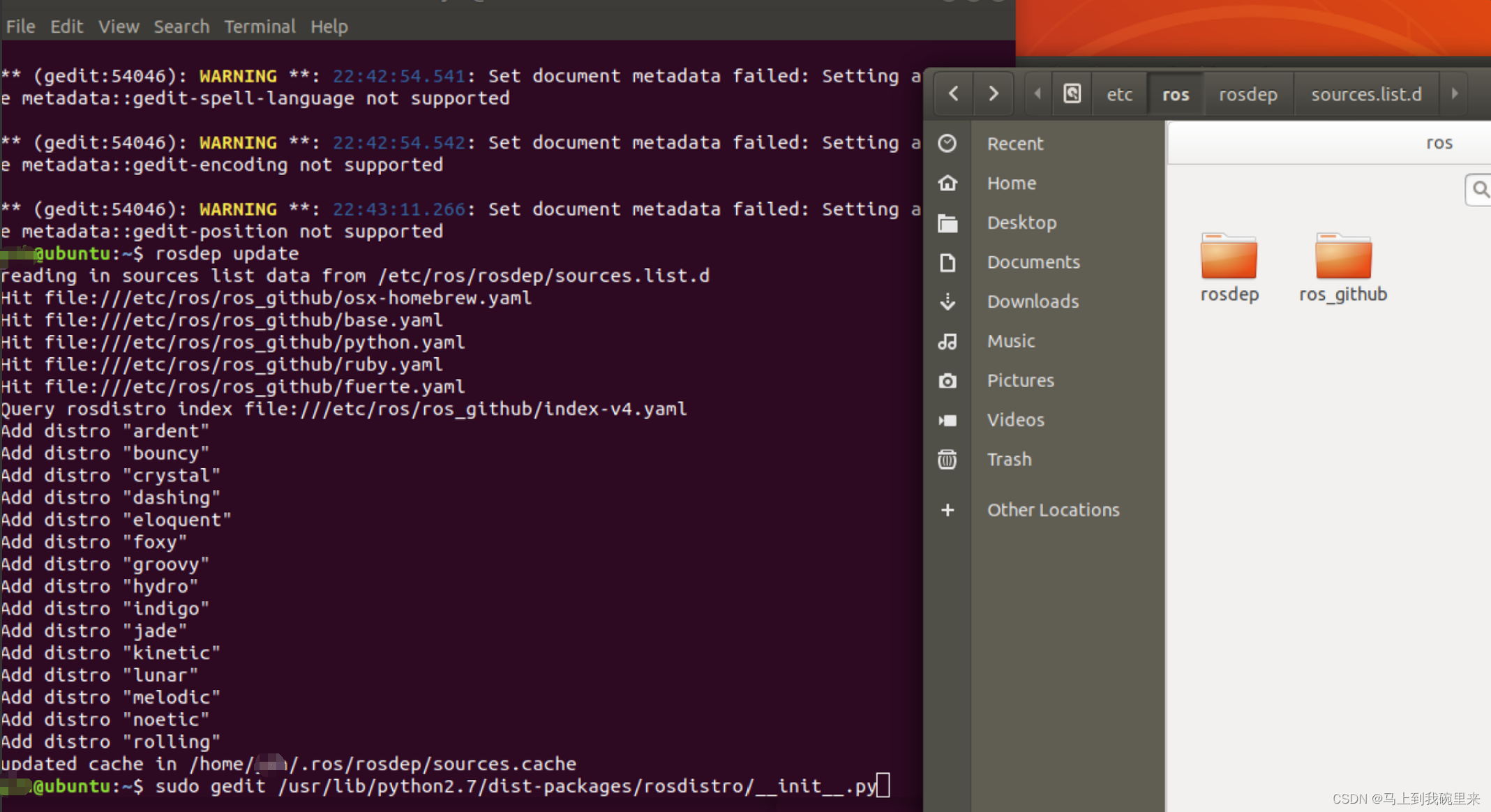
添加右侧的文件夹,然后改动rosdep中的文件链接地址为本地,然后改动init的py文件为本地即可。
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/**init**.py
5 安装rosinstall
sudo apt-get install python-rosinstall

这一步并没有成功,但似乎也没有影响到后面的进展?
6 加载环境设置文件
source /opt/ros/melodic/setup.bash

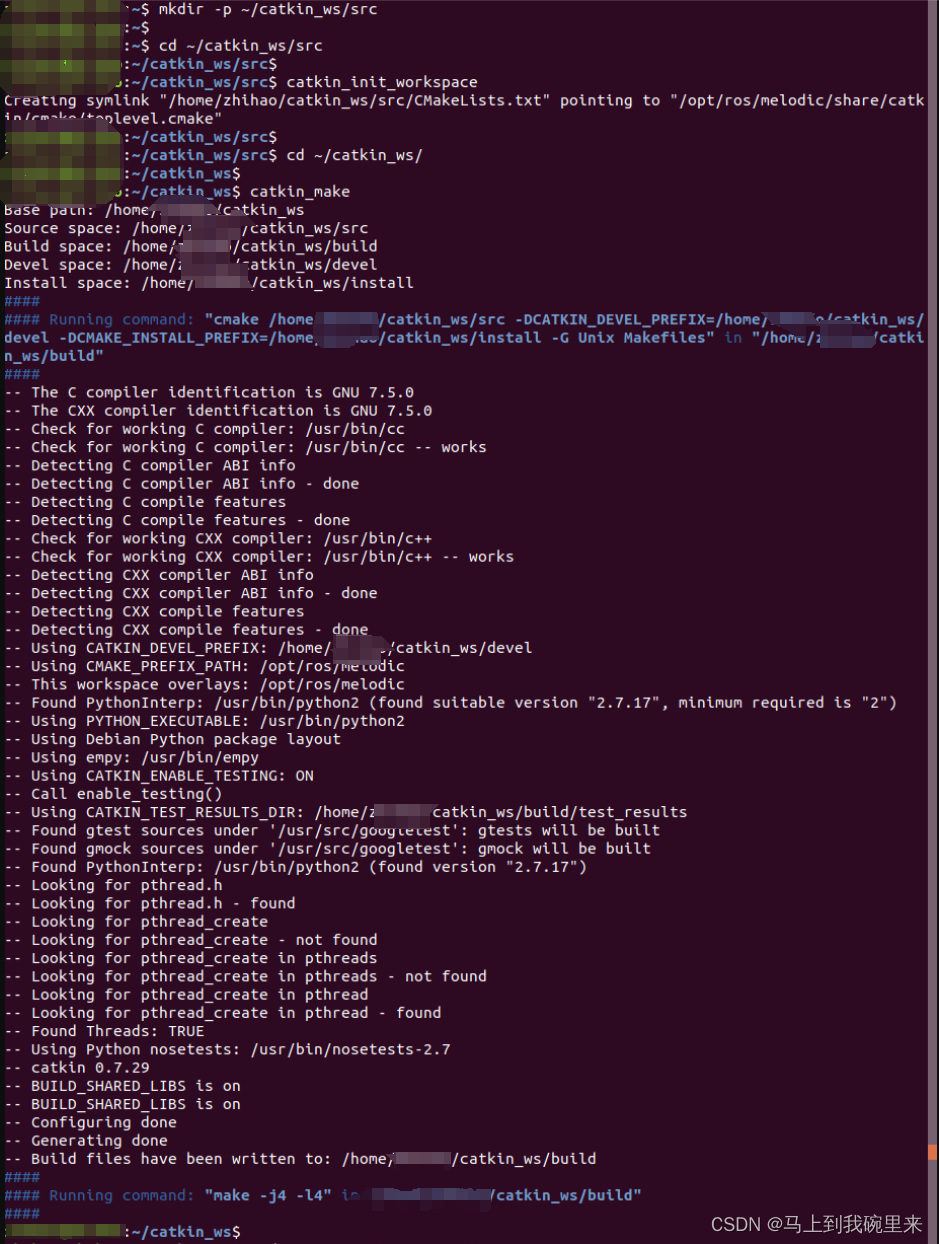
7 创建并初始化工作目录
ROS使用一个名为catkin的ROS专用构建系统。为了使用它,用户需要创建并初始化
catkin工作目录,如下所示。除非用户创建新的工作目录,否则此设置只需设置一次。
mkdir -p ~/catkin_ws/srccd ~/catkin_ws/srccatkin_init_workspace
目前,只有src目录和CMakeLists.txt文件在catkin工作目录中,使用catkin_make命令来构建
cd ~/catkin_ws/catkin_make
8 设置环境变量(略过)
sudo apt install net-tools
gedit ~/.bashrc
这里操作过程中直接跳到了下一步,并没有用,需要注意!
# Set ROS melodic
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash# Set ROS Network
#ifconfig查看你的电脑ip地址
export ROS_HOSTNAME=192.168.89.135
export ROS_MASTER_URI=http://${ROS_HOSTNAME}:11311# Set ROS alias command 快捷指令
alias cw='cd ~/catkin_ws'
alias cs='cd ~/catkin_ws/src'
alias cm='cd ~/catkin_ws && catkin_make'

💡 当执行sudo rosdep init,反馈没有该指令。我在网上查找的一个方法是:在终端输入rosdep init,终端提示安装"sudo apt install python-rosdep2 " ,按照提示安装后,确实可以执行sudo rosdep init。但是sudo apt install python-rosdep2会导致之前sudo apt-get install ros-melodic-desktop-full安装的包部分丢失(这是后面才意识到的问题),执行楼主所有步骤后,发现没有roscore这个指令,所以还要重新执行sudo apt-get install ros-melodic-desktop-full,就有roscore指令了。
9 配置ROS环境变量
第八步的操作确实是有点迷(第八步确实有用,在roscore没反应的时候,需要重新执行一次最开始的sudo apt-get install ros-melodic-desktop-full),所以就直接跳过了,这里的操作也可以直接用。
默认情况下,ROS_HOME的路径为"~/.ros",该目录保存着日志文件和测试结果文件。另外,第一次启动ROS时,需要进行环境变量配置,命令如下:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
这两条指令相当于Windows系统中设置环境变量path,即在终端可以自由使用ROS系统指令,这里强调是系统指令,而不是自己创建的包或者节点,后者是需要使能相应的工作空间,具体可以参考:ROS工作空间。
查看环境变量是否设置正确,命令如下:
env | grep ROS
笔者查看环境变量结果如下:
ROS_ETC_DIR=/opt/ros/melodic/etc/ros
ROS_ROOT=/opt/ros/melodic/share/ros
ROS_VERSION=1
ROS_PYTHON_VERSION=2
ROS_PACKAGE_PATH=/opt/ros/melodic/share
ROS_DISTRO=melodic
至此,ROS的核心程序包安装完毕。
然后按下图执行命令:
10 启动运行小海龟例子
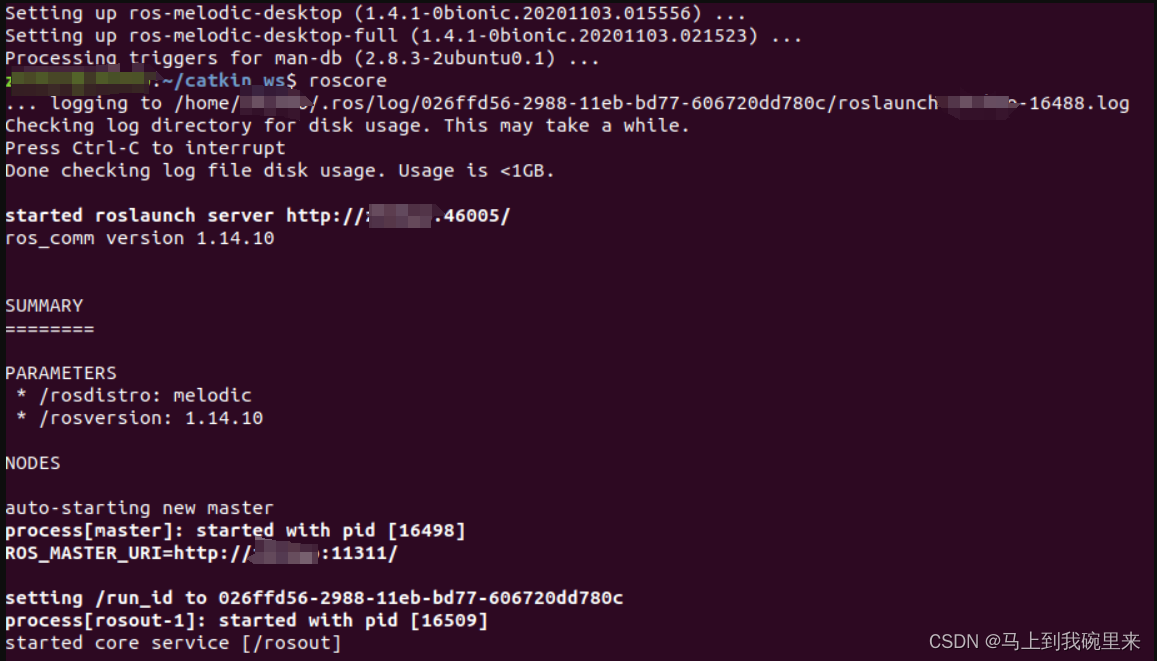
1.第一个终端运行如下命令
roscore

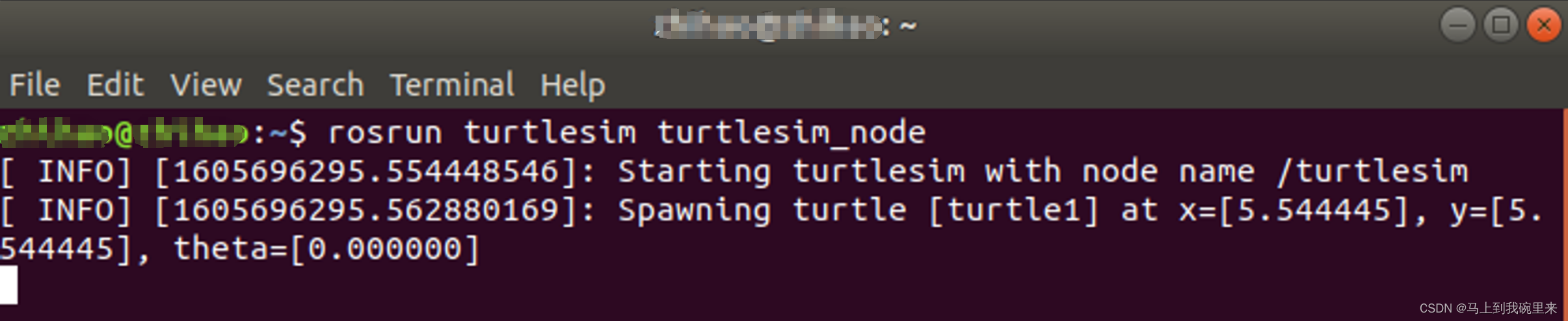
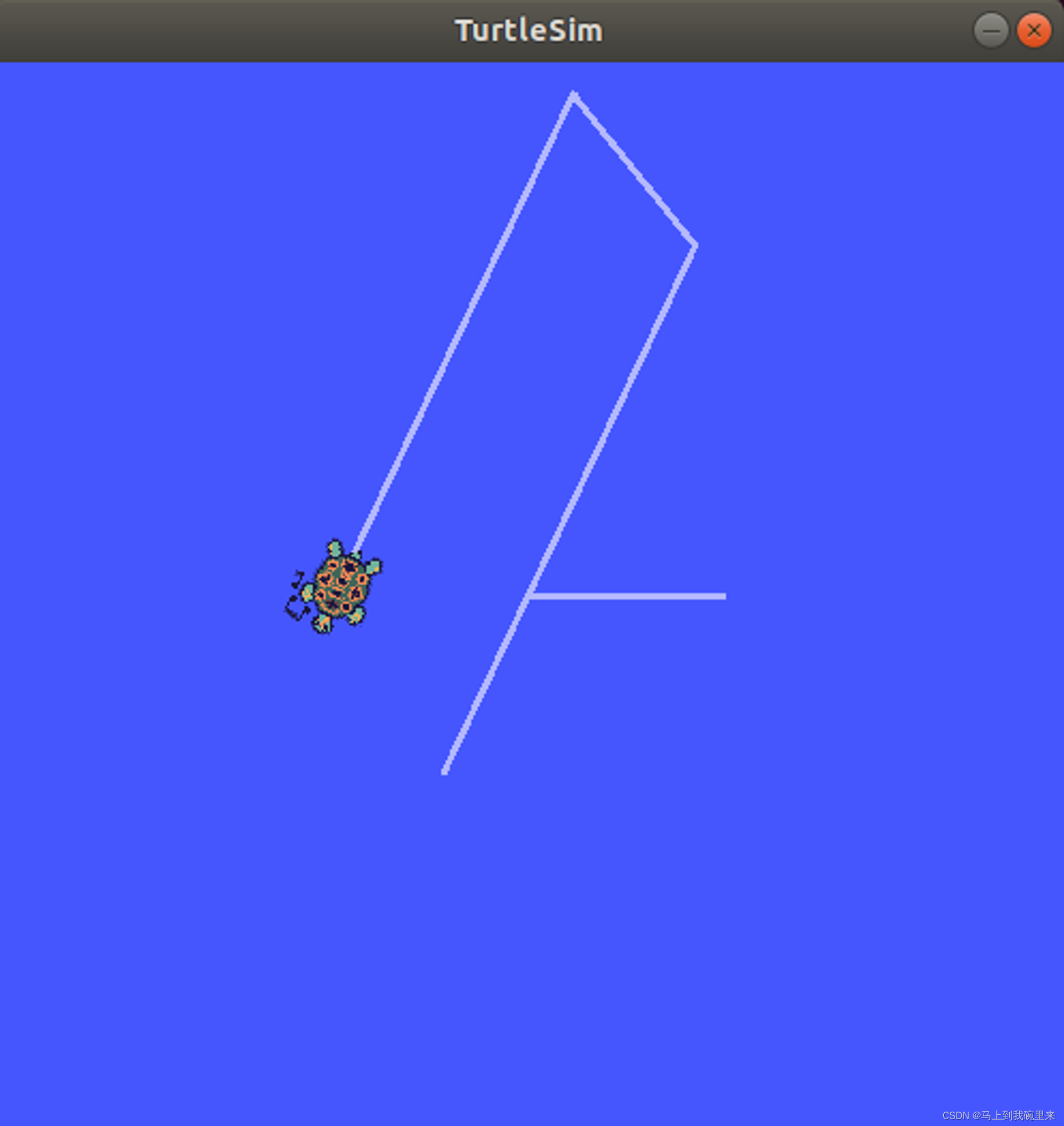
2.打开第二个终端,也可以利用 Ctrl+Shift+T 快捷键打开一个新的终端,运行如下命令,这时你会看见一只静止的小海龟
rosrun turtlesim turtlesim_node
3.如果希望小海龟能够移动,打开第三个终端,利用Ctrl+Shift+T快捷键再打开一个新的终端,启动turtlesim的键盘控制节点turtle_teleop_key,运行如下命令
rosrun turtlesim turtle_teleop_key
11 小结
时至今日,已经不再用上述如此复杂的方式来配置环境,但是希望这个过程可以给有需要的朋友一点启发和帮助。
Reference
ubuntu18.04安装ROS Melodic(最详细配置)
Ubuntu 20.04安装Ros Noetic及Ubuntu 18.04安装ROS Melodic(两版本详细填坑)
Ubuntu18.04安装ROS Melodic(详细,亲测安装完成,有清晰的截图步骤)
相关文章:
环境配置:Ubuntu18.04 ROS Melodic安装
前言 不同版本的Ubuntu与ROS存在对应关系。 ROS作为目前最受欢迎的机器人操作系统,其核心代码采用C编写,并以BSD许可发布。ROS起源于2007年,是由斯坦福大学与机器人技术公司Willow Garage合作的Switchyard项目。2012年,ROS团队从…...
)
2024.2.7-8 寒假训练记录(21)
文章目录 洛谷P3193 [HNOI2008] GT考试ATC abc339E Smooth SubsequenceATC abc339F Product Equality 洛谷P3193 [HNOI2008] GT考试 题目链接 KMPdp矩阵快速幂 还没有理解得很清楚,主要是对KMP理解还不够深刻 #include <bits/stdc.h>using namespace std;…...

C++ pair 的使用
pair的作用 C 中的 std::pair 是标准模板库 (STL) 提供的一个容器,它能够存储两个不同类型的数据作为一个整体,其中first:访问 pair 的第一个元素。second:访问 pair 的第二个元素。 int main() {pair<string, int> p;//通…...

AAAI 2024 | Adobe提出全新上下文提示学习框架CoPL,高效提升下游性能
论文题目:CoPL: Contextual Prompt Learning for Vision-Language Understanding 论文链接:https://arxiv.org/abs/2307.00910 提示学习(Prompt Learning)在近几年的快速发展,激活了以Transformer为基础的大型语言模型…...
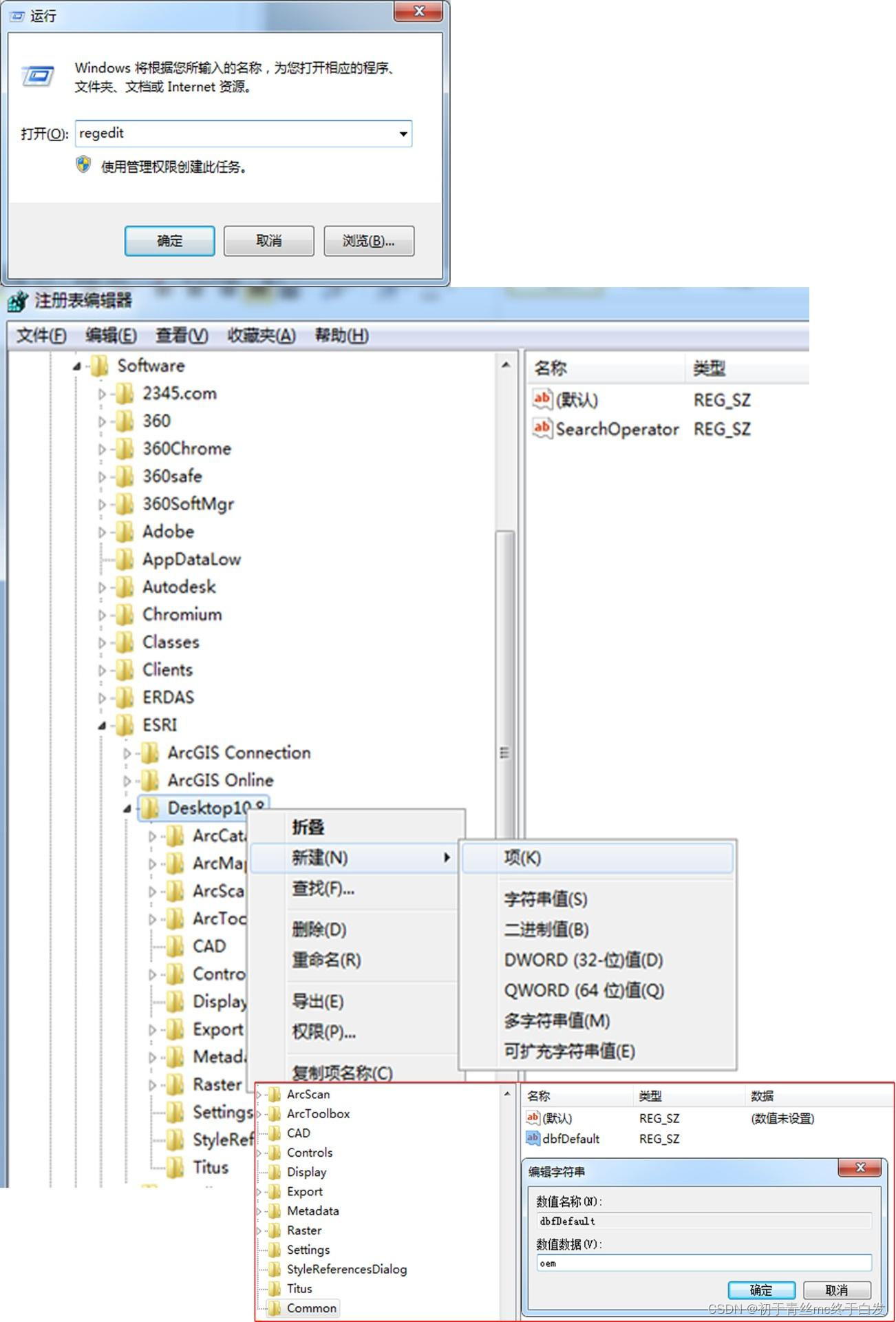
Arcgis使用过程中常见问题解决方法
Arcgis无法连接数据库/数据库连接或创建失败解决方法 最近在使用arcgis过程中出现无法连接数据库或者是无法创建数据库。连接到数据库失败;无法创建新的数据库,权限被拒绝(如下图)。 出现这个原因是你所用的电脑系统文件dao360.…...

office文件转pdf在线预览
一、工具类 package com.sby.utils;import java.io.File; import java.io.FileInputStream; import java.io.FileOutputStream; import java.io.InputStream; import java.math.RoundingMode; import java.text.DecimalFormat; import java.util.Locale;import com.aspose.cel…...
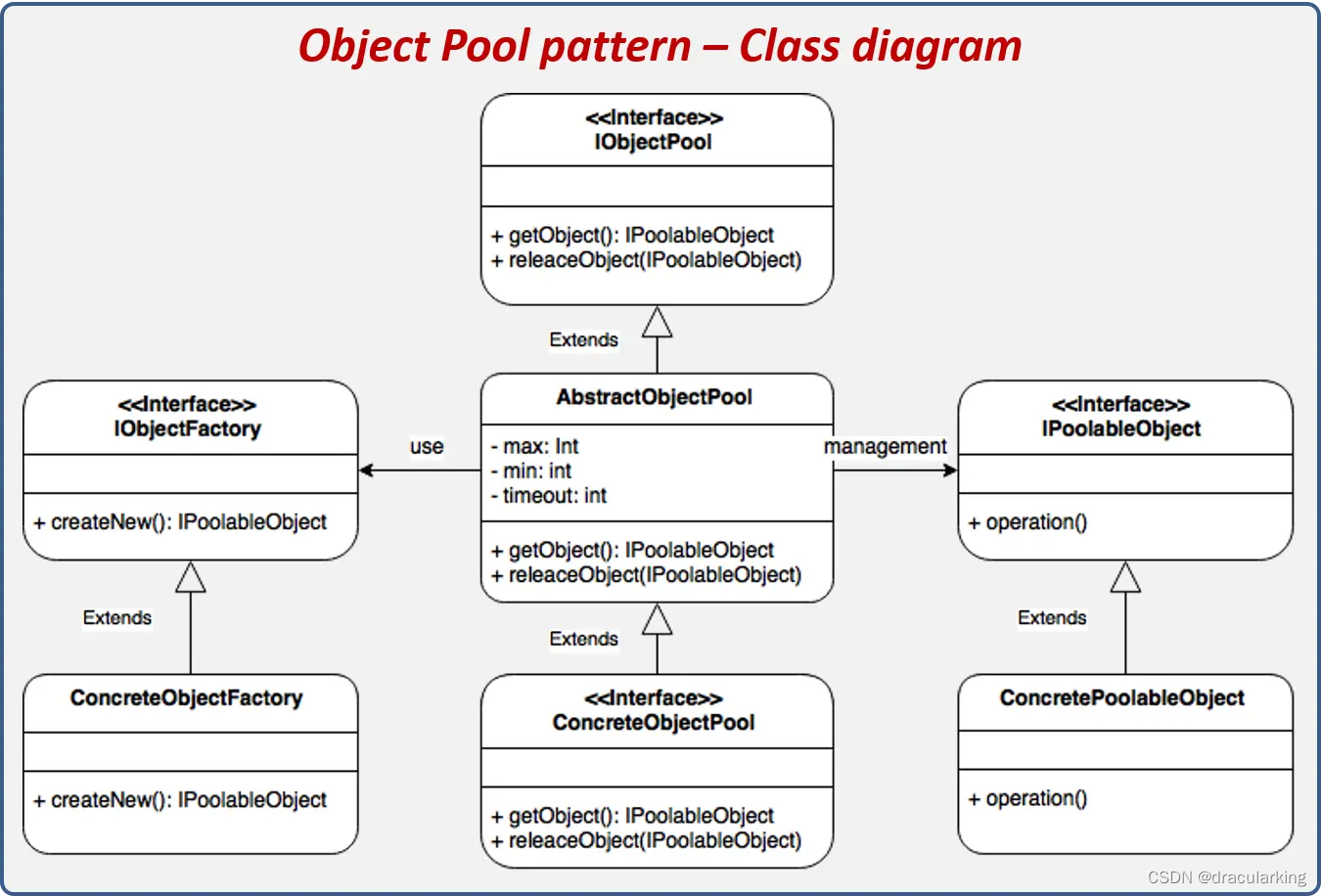
设计模式2-对象池模式
对象池模式,Object Pool Pattern,当你的应用程序需要频繁创建和销毁某种资源(比如数据库连接、线程、socket连接等)时,Object Pool 设计模式就变得很有用。它通过预先创建一组对象并将它们保存在池中,以便在…...

Oracle笔记-为表空间新增磁盘(ORA-01691)
如下报错: 原因是Oracle表空间满了,最好是新增一个存储盘。 #查XXX命名空间目前占用了多大的空间 select FILE_NAME,BYTES/1024/1024 from dba_data_files where tablespace_name XXXX #这里的FILE_NAME能查到DBF的存储位置#将对应的datafile设置为30g…...

【专业技术】高效并行分布式深度学习策略,助力模型训练与量化
尊敬的客户,您好!我们是一家专注于提供高效深度学习解决方案的专业团队,为您提供并行分布式策略、高效精调策略、大模型无损量化和高性能推理服务。 我们的服务包括: 并行分布式策略:我们的Trainer封装支持多种并行配…...

力扣-137. 只出现一次的数字 II
文章目录 力扣题目代码 力扣题目 给你一个整数数组 nums ,除某个元素仅出现 一次 外,其余每个元素都恰出现 三次 。请你找出并返回那个只出现了一次的元素。 你必须设计并实现线性时间复杂度的算法且使用常数级空间来解决此问题。 示例 1:…...
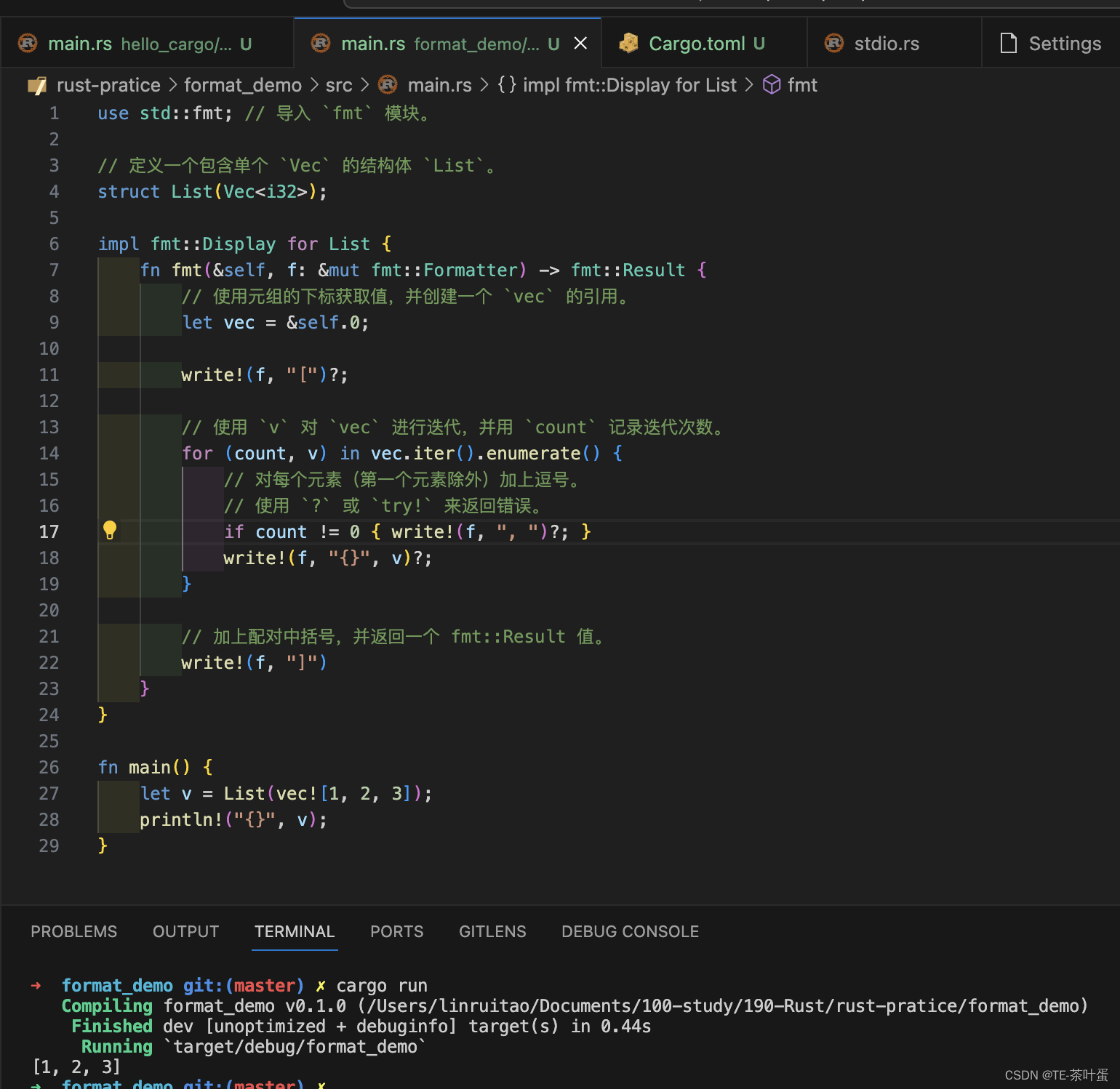
Rust 格式化输出
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、format! 宏二、fmt::Debug三、fmt::Display四、? 操作符 循环打印 前言 Rust学习系列-本文根据教程学习Rust的格式化输出,包括fmt::Debug&…...
常用方法)
c#进程(Process)常用方法
在C#中,Process类提供了一系列用于操作进程的常用方法,以下是其中一些常用的方法: Start():启动一个新的进程。 Process.Start("notepad.exe");Kill():终止进程。 Process.GetProcessesByName("note…...
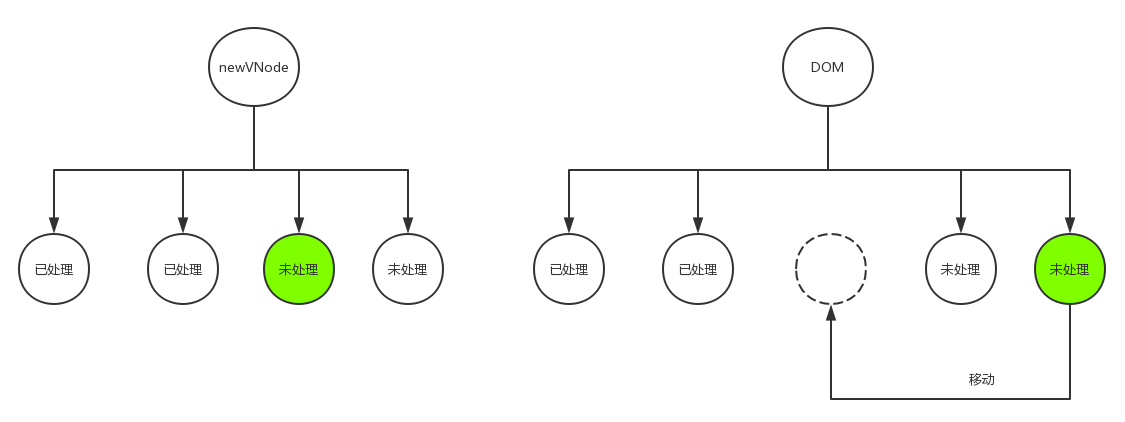
Vue源码系列讲解——虚拟DOM篇【三】(更新子节点)
1. 前言 在上一篇文章中,我们了解了Vue中的patch过程,即DOM-Diff算法。并且知道了在patch过程中基本会干三件事,分别是:创建节点,删除节点和更新节点。创建节点和删除节点都比较简单,而更新节点因为要处理…...

一个设备内存2M,一个1G大小的文件,这个文件有若干行,输出其中的带有hello的行以及行数
第一种 linux上的awk命令: awk {if($1 "113.111.211.224"){print $0}} temp.log 第二种:PHP程序yield ,和awk这个命令用的时间差不多一样,效率是很高的 $file __DIR__."/temp.log";foreach(readfilecong…...
)
json模块(高维数据的存储与读取)
json模块是 Python 标准库中的一个模块,用于处理 JSON(JavaScript Object Notation)格式的数据。JSON是一种轻量级的数据交换格式,易于人阅读和编写,同时也易于机器解析和生成。模块提供了在 Python 中进行 JSON 编码&…...
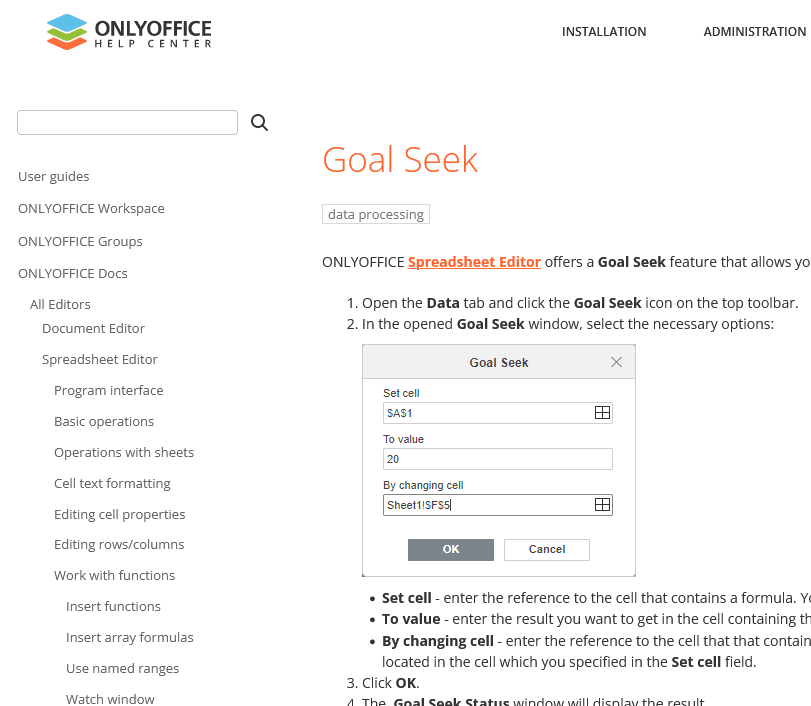
ONLYOFFICE文档8.0新功能浅探
ONLYOFFICE文档8.0新功能浅探 上个月末这个月初的几天,ONLYOFFICE版本更新了!更新到了一个比较整的大的版本号,8.0版本,看来这个生产力工具的升级速度基本上能保持每年两个版本号的速度,还是很快的,一般来…...
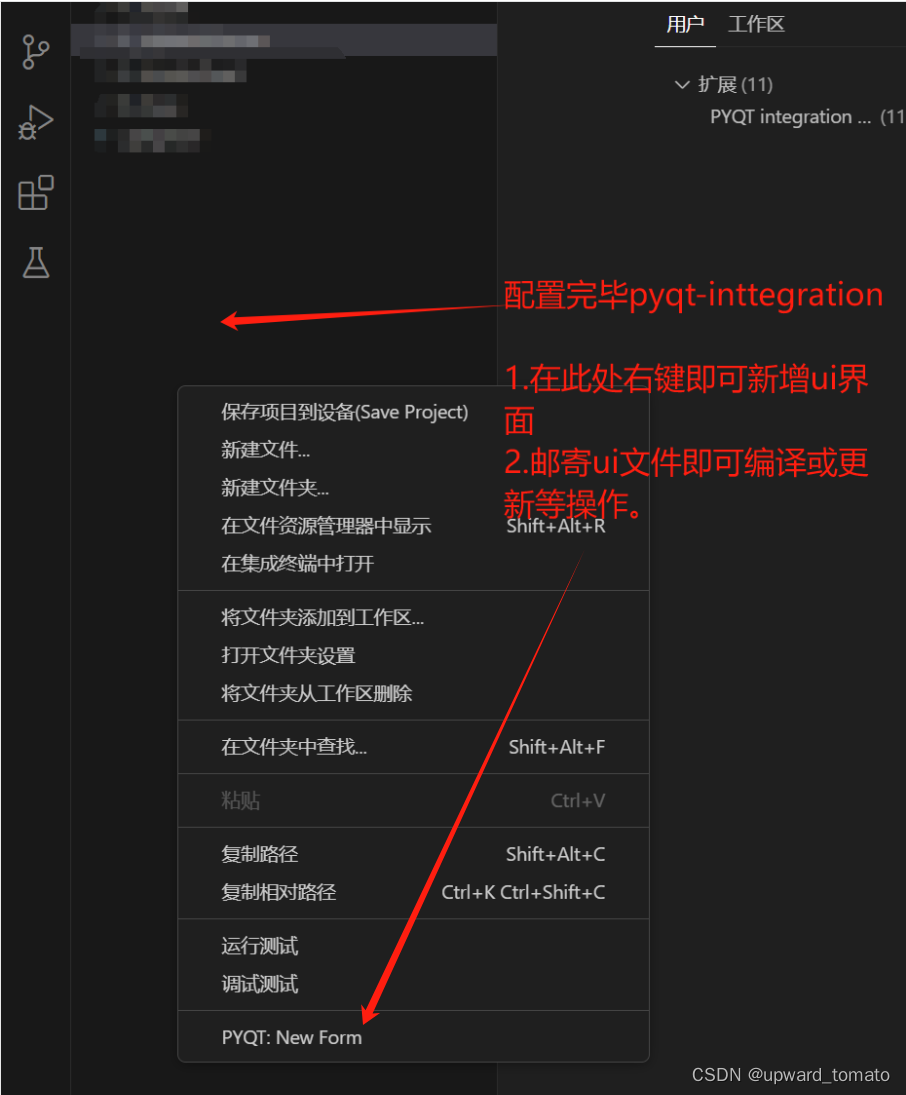
在vscode 中配置 pyside6 环境
在vscode中编写pyside环境配置 start 记录一下在 vscode 中编写 pyside6 程序,环境如何配置。 前提 请自行安装好 python。请自行安装好 vscode。安装 vscode 插件 Python,PYQT Integration。 配置环境 1.借助 pip 安装我们的pyside6 pip install…...

C语言:月份缩写
题目描述 从一月份到十二月的英文全称依次是:“January”,“February”,“March”,“April”,“May”,“June”,“July”,“August”,“September”,“October”,“November”,“December” 对应的缩写依次是:“Jan.”,“Feb.”,“Mar.”,“Apr.”,“Ma…...

线阵相机系列-- 1. 什么是线阵相机
线阵相机的概念 根据工业相机像素排列方式的不同,分为面阵相机和线阵相机。面阵相机的像素排列为一个完整的面,一次获取整幅二维图像,而线阵相机的像素以一条线排列,每次得到的图像呈现出一条线,通过设置扫描频率以及…...

CISCRISC? CPU架构有哪些? x86 ARM?
编者按:鉴于笔者水平有限,文中难免有不当之处,还请各位读者海涵。 是为序 我猜,常年混迹CSDN的同学应该不会没听说过CPU吧? 但你真的了解CPU吗?那笔者问你CPU有哪些架构呢? 如果你对你的答案…...
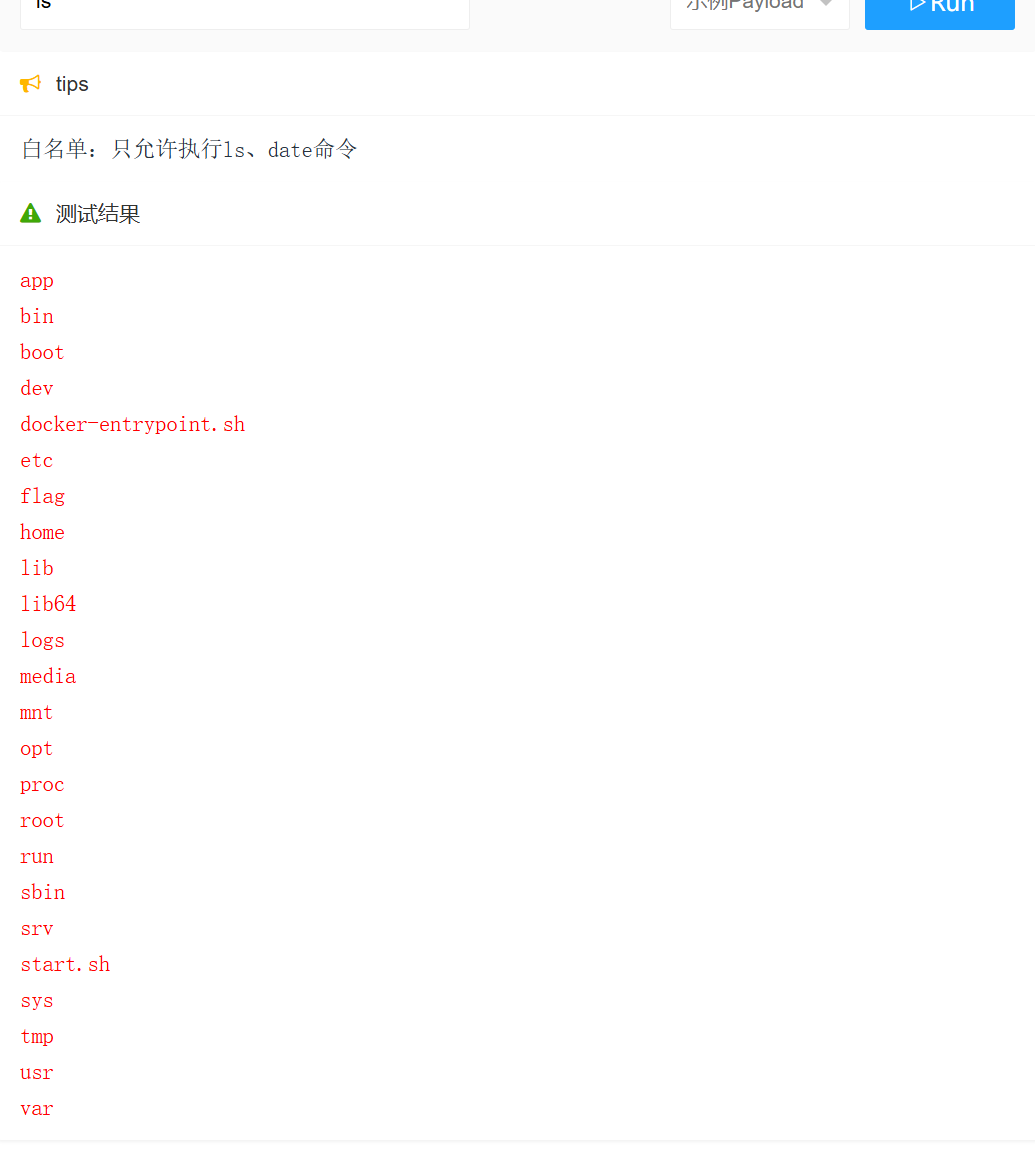
JavaSec-RCE
简介 RCE(Remote Code Execution),可以分为:命令注入(Command Injection)、代码注入(Code Injection) 代码注入 1.漏洞场景:Groovy代码注入 Groovy是一种基于JVM的动态语言,语法简洁,支持闭包、动态类型和Java互操作性,…...

Cursor实现用excel数据填充word模版的方法
cursor主页:https://www.cursor.com/ 任务目标:把excel格式的数据里的单元格,按照某一个固定模版填充到word中 文章目录 注意事项逐步生成程序1. 确定格式2. 调试程序 注意事项 直接给一个excel文件和最终呈现的word文件的示例,…...

AI Agent与Agentic AI:原理、应用、挑战与未来展望
文章目录 一、引言二、AI Agent与Agentic AI的兴起2.1 技术契机与生态成熟2.2 Agent的定义与特征2.3 Agent的发展历程 三、AI Agent的核心技术栈解密3.1 感知模块代码示例:使用Python和OpenCV进行图像识别 3.2 认知与决策模块代码示例:使用OpenAI GPT-3进…...

为什么需要建设工程项目管理?工程项目管理有哪些亮点功能?
在建筑行业,项目管理的重要性不言而喻。随着工程规模的扩大、技术复杂度的提升,传统的管理模式已经难以满足现代工程的需求。过去,许多企业依赖手工记录、口头沟通和分散的信息管理,导致效率低下、成本失控、风险频发。例如&#…...
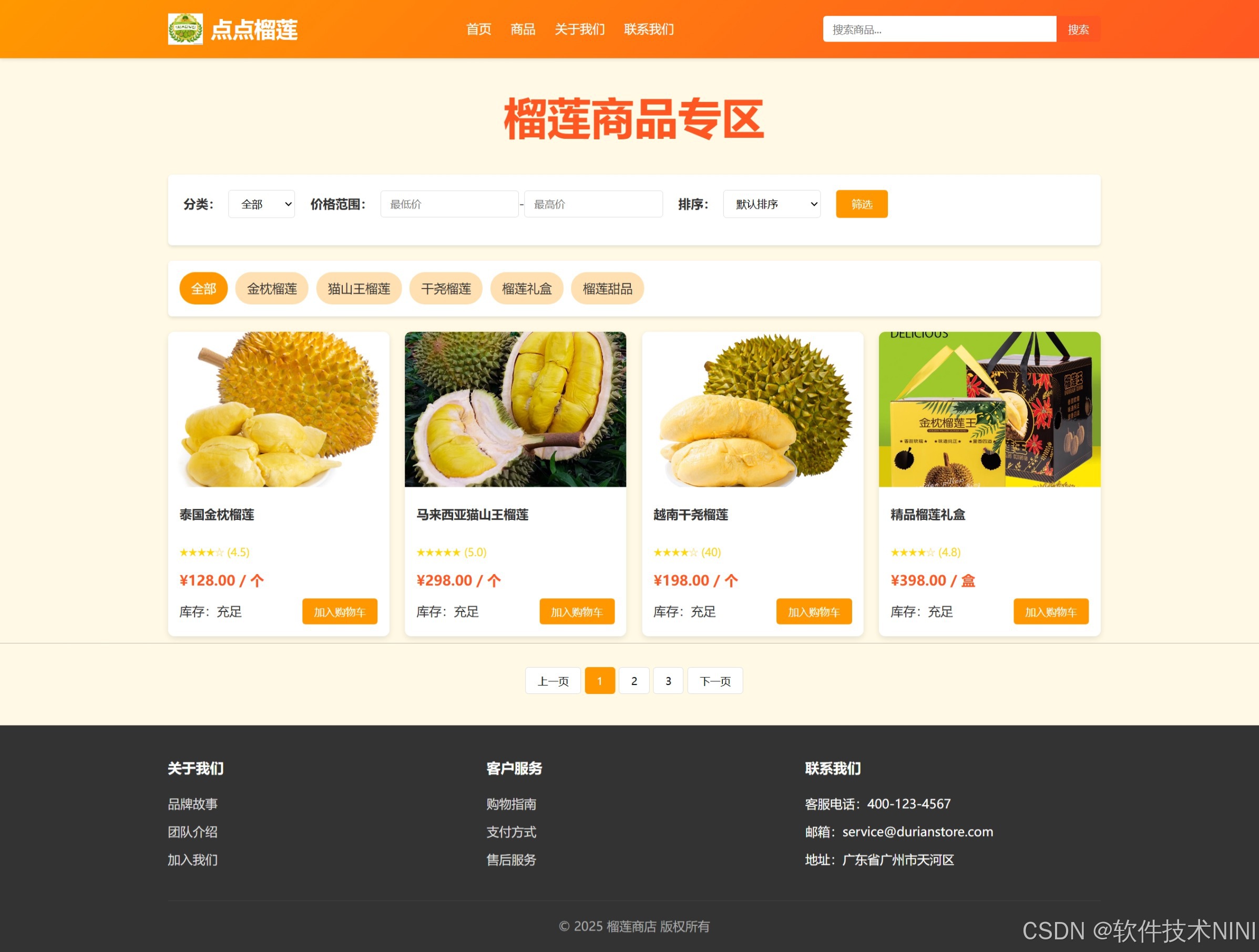
html css js网页制作成品——HTML+CSS榴莲商城网页设计(4页)附源码
目录 一、👨🎓网站题目 二、✍️网站描述 三、📚网站介绍 四、🌐网站效果 五、🪓 代码实现 🧱HTML 六、🥇 如何让学习不再盲目 七、🎁更多干货 一、👨…...

【分享】推荐一些办公小工具
1、PDF 在线转换 https://smallpdf.com/cn/pdf-tools 推荐理由:大部分的转换软件需要收费,要么功能不齐全,而开会员又用不了几次浪费钱,借用别人的又不安全。 这个网站它不需要登录或下载安装。而且提供的免费功能就能满足日常…...
【从零学习JVM|第三篇】类的生命周期(高频面试题)
前言: 在Java编程中,类的生命周期是指类从被加载到内存中开始,到被卸载出内存为止的整个过程。了解类的生命周期对于理解Java程序的运行机制以及性能优化非常重要。本文会深入探寻类的生命周期,让读者对此有深刻印象。 目录 …...

2025年渗透测试面试题总结-腾讯[实习]科恩实验室-安全工程师(题目+回答)
安全领域各种资源,学习文档,以及工具分享、前沿信息分享、POC、EXP分享。不定期分享各种好玩的项目及好用的工具,欢迎关注。 目录 腾讯[实习]科恩实验室-安全工程师 一、网络与协议 1. TCP三次握手 2. SYN扫描原理 3. HTTPS证书机制 二…...

解决:Android studio 编译后报错\app\src\main\cpp\CMakeLists.txt‘ to exist
现象: android studio报错: [CXX1409] D:\GitLab\xxxxx\app.cxx\Debug\3f3w4y1i\arm64-v8a\android_gradle_build.json : expected buildFiles file ‘D:\GitLab\xxxxx\app\src\main\cpp\CMakeLists.txt’ to exist 解决: 不要动CMakeLists.…...
基于Java+VUE+MariaDB实现(Web)仿小米商城
仿小米商城 环境安装 nodejs maven JDK11 运行 mvn clean install -DskipTestscd adminmvn spring-boot:runcd ../webmvn spring-boot:runcd ../xiaomi-store-admin-vuenpm installnpm run servecd ../xiaomi-store-vuenpm installnpm run serve 注意:运行前…...