智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助
今天分享的是智能汽车系列深度研究报告:《智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助》。
(报告出品方:开源证券)
报告共计:43页
视觉感知最佳辅助——4D 成像毫米波雷达
感知是自动驾驶的首要环节,高性能传感器必不可少
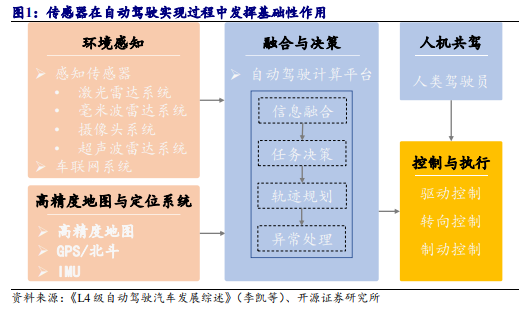
感知环节负责对侦测、识别、跟踪目标,是自动驾驶实现的第一步。自动驾驶 的实现,首先要能够准确理解驾驶环境信息,需要对交通主体、交通信号、环境物 体等信息进行有效捕捉,根据实时感知的环境信息,自动驾驶系统得以完成接下来 的决策、规划与控制等环节。传感器的性能会直接影响到感知信息的质量,目前广 泛搭载的传感器有摄像头、激光雷达、毫米波雷达、超声波雷达等。
特斯拉的视觉感知方案推动自动驾驶行业进入新的篇章。2021 年,特斯拉使用 Transformer 算法构建 BEV(Bird’s Eye-View, 鸟瞰图)空间,解决了传统视觉感知 的深度探测难点,从而通过视觉也可以进行较为准确的距离估计;同时, Transformer 算法更契合多个传感器融合,可拓展性更强。2022 年,特斯拉使用基 于 BEV+Transformer 和占用网络,形成对外部 3D 空间的还原,对通用障碍物感知能力进一步增强。特斯拉依靠摄像头进行感知的 FSD 功能已经能够实现近乎对全部 驾驶场景的覆盖,累计行驶里程呈指数型增长。

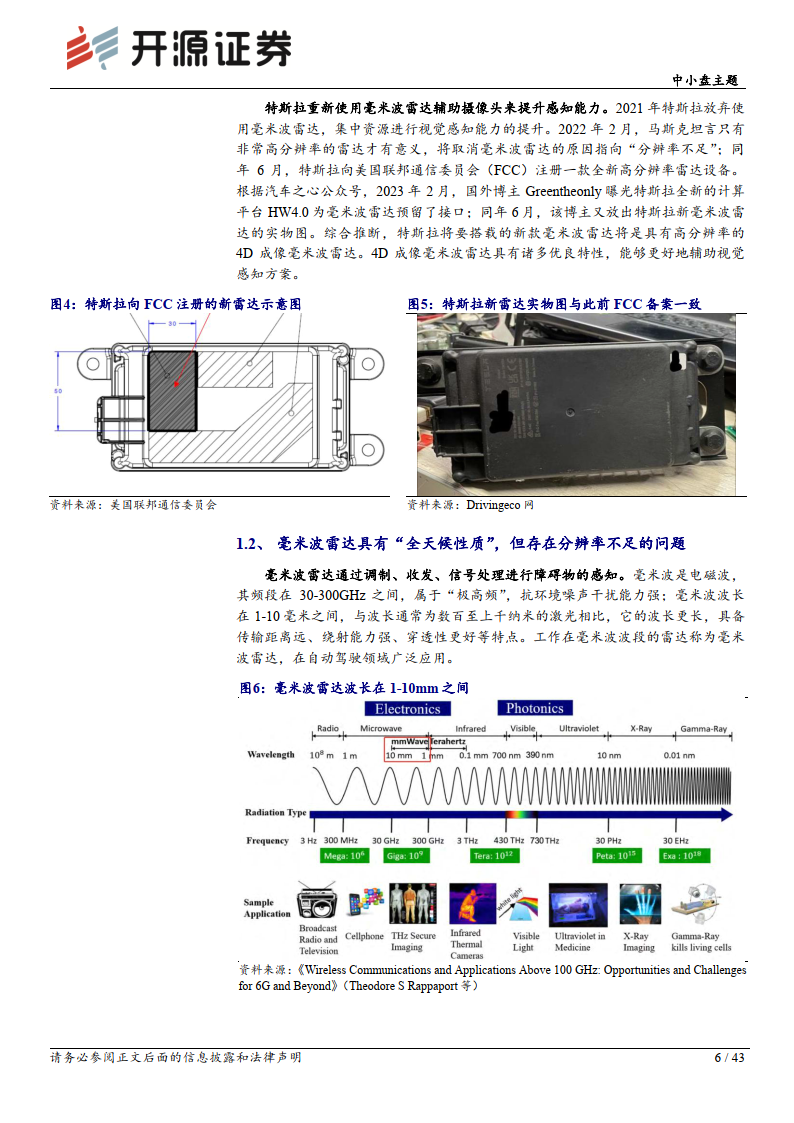
特斯拉重新使用毫米波雷达辅助摄像头来提升感知能力。2021 年特斯拉放弃使 用毫米波雷达,集中资源进行视觉感知能力的提升。2022 年 2 月,马斯克坦言只有 非常高分辨率的雷达才有意义,将取消毫米波雷达的原因指向“分辨率不足”;同 年 6 月,特斯拉向美国联邦通信委员会(FCC)注册一款全新高分辨率雷达设备。 根据汽车之心公众号,2023 年 2 月,国外博主 Greentheonly 曝光特斯拉全新的计算 平台 HW4.0 为毫米波雷达预留了接口;同年 6 月,该博主又放出特斯拉新毫米波雷达的实物图。综合推断,特斯拉将要搭载的新款毫米波雷达将是具有高分辨率的 4D 成像毫米波雷达。4D 成像毫米波雷达具有诸多优良特性,能够更好地辅助视觉感知方案。

毫米波雷达具有“全天候性质”,但存在分辨率不足的问题
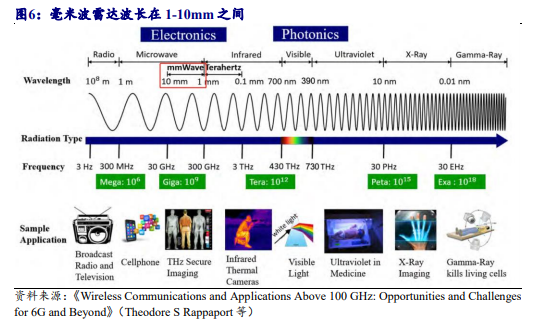
毫米波雷达通过调制、收发、信号处理进行障碍物的感知。毫米波是电磁波, 其频段在 30-300GHz 之间,属于“极高频”,抗环境噪声干扰能力强;毫米波波长 在 1-10 毫米之间,与波长通常为数百至上千纳米的激光相比,它的波长更长,具备传输距离远、绕射能力强、穿透性更好等特点。工作在毫米波波段的雷达称为毫米波雷达,在自动驾驶领域广泛应用。
毫米波雷达主要由雷达前端收发模块、数字信号处理单元以及接口模块组成。 雷达前端收发模块进行毫米波信号的调制、发射与接收,包括天线阵列、射频前端、 中频电路、模数转换器;数字信号处理单元进行信号处理与数据处理,包括 DSP (数字信号处理器)、MCU(微控制单元)或 FPGA(现场可编程门阵列)等;接口模块负责数据通信以及与其他系统的集成。毫米波半导体技术已经比较成熟,已经在自动驾驶车辆中广泛应用。
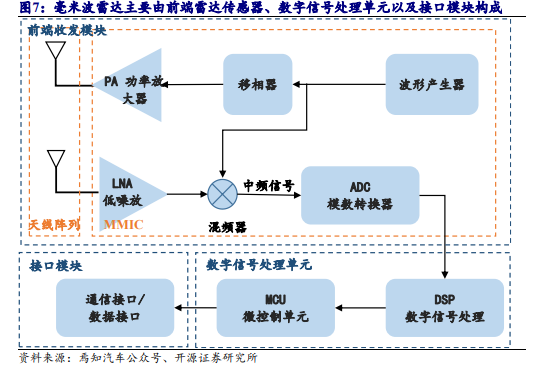
信号收发与信号处理是毫米波雷达运行的重点环节。毫米波雷达工作流程如图 7 所示:(1)首先射频发射器产生电磁波信号并且将之发射,信号到达目标物体; (2)物体反射或者散射信号形成回波信号,接收器接收回波信号;(3)混频器将 回波信号与原始信号混合,经过滤波器进行滤波,得到中频信号(实际是雷达发射信号与回波信号的频率差,包含有物体的位置、速度等信息);(4)中频信号输入到处理后端进行调制解调、FFT(Fast Fourier Transform,快速傅里叶变换)等算法处理,提取目标信息并进行分析,实现目标检测、距离测量、速度测量、方位估计; (5)最终将结果输出以进行后续感知处理。

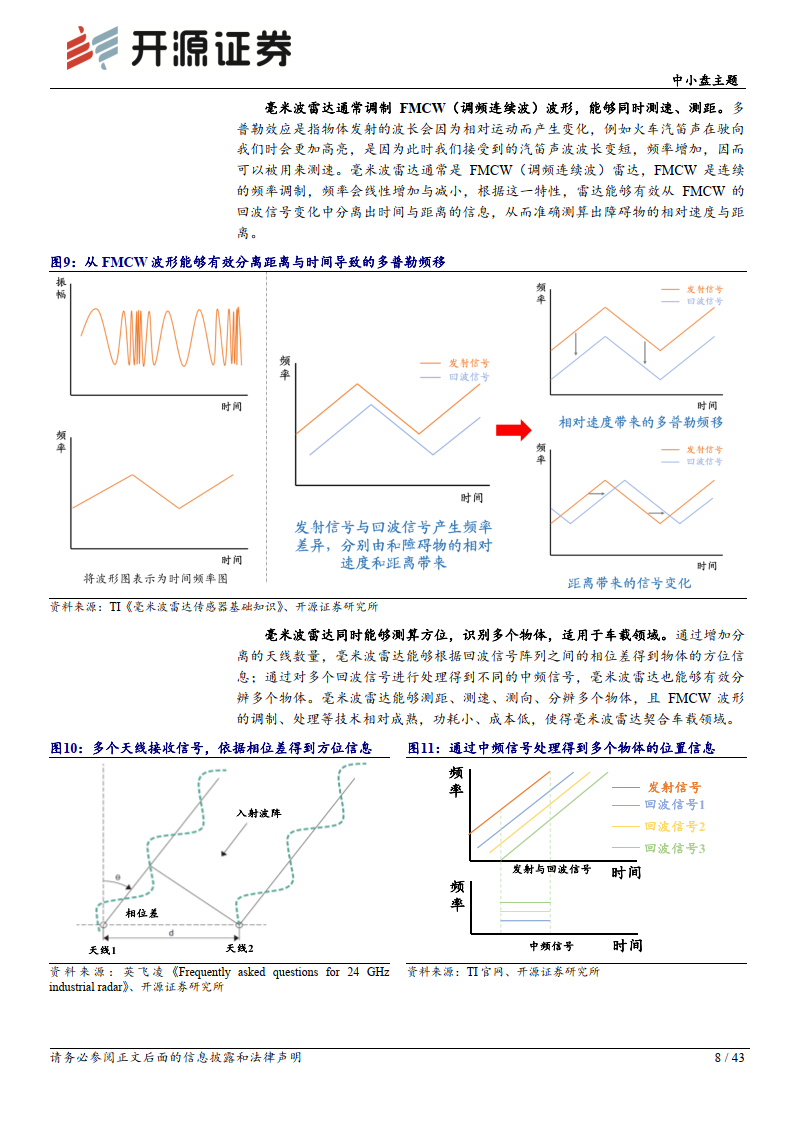
毫米波雷达通常调制 FMCW(调频连续波)波形,能够同时测速、测距。多 普勒效应是指物体发射的波长会因为相对运动而产生变化,例如火车汽笛声在驶向 我们时会更加高亮,是因为此时我们接受到的汽笛声波波长变短,频率增加,因而 可以被用来测速。毫米波雷达通常是 FMCW(调频连续波)雷达,FMCW 是连续 的频率调制,频率会线性增加与减小,根据这一特性,雷达能够有效从 FMCW 的 回波信号变化中分离出时间与距离的信息,从而准确测算出障碍物的相对速度与距离。

毫米波雷达同时能够测算方位,识别多个物体,适用于车载领域。通过增加分离的天线数量,毫米波雷达能够根据回波信号阵列之间的相位差得到物体的方位信 息;通过对多个回波信号进行处理得到不同的中频信号,毫米波雷达也能够有效分 辨多个物体。毫米波雷达能够测距、测速、测向、分辨多个物体,且 FMCW 波形 的调制、处理等技术相对成熟,功耗小、成本低,使得毫米波雷达契合车载领域。

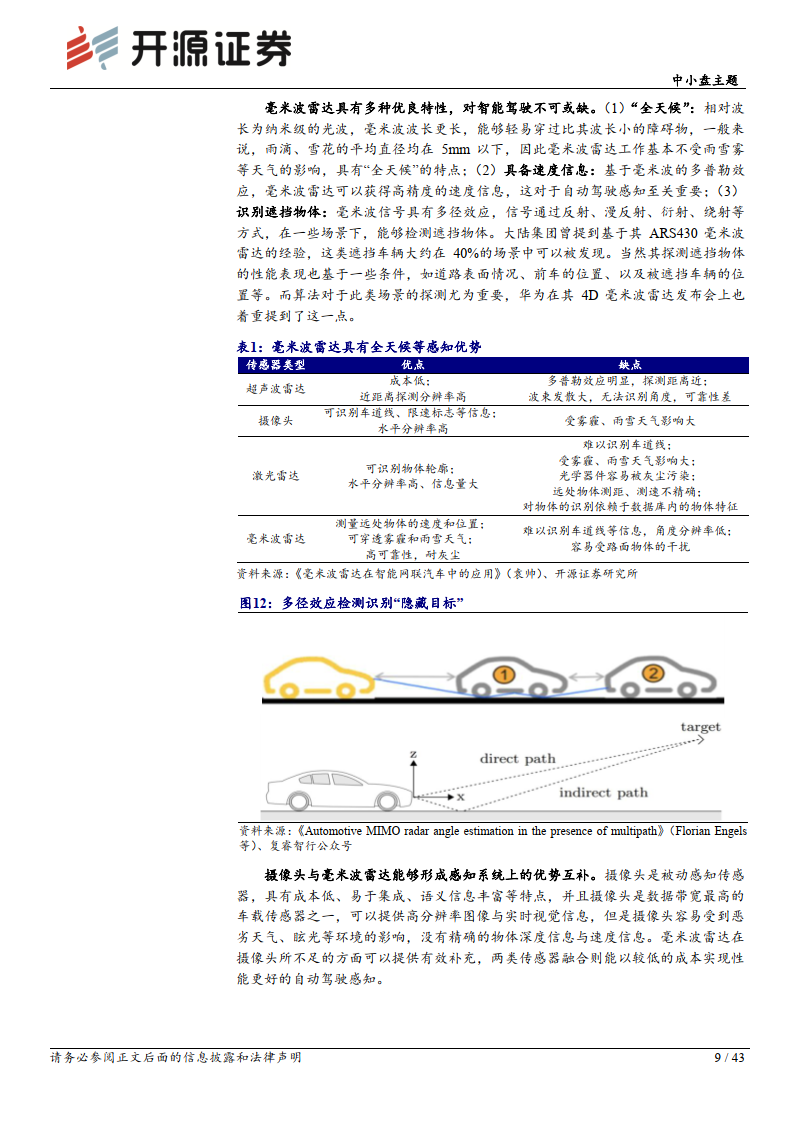
毫米波雷达具有多种优良特性,对智能驾驶不可或缺。(1)“全天候”:相对波 长为纳米级的光波,毫米波波长更长,能够轻易穿过比其波长小的障碍物,一般来 说,雨滴、雪花的平均直径均在 5mm 以下,因此毫米波雷达工作基本不受雨雪雾 等天气的影响,具有“全天候”的特点;(2)具备速度信息:基于毫米波的多普勒效 应,毫米波雷达可以获得高精度的速度信息,这对于自动驾驶感知至关重要;(3) 识别遮挡物体:毫米波信号具有多径效应,信号通过反射、漫反射、衍射、绕射等 方式,在一些场景下,能够检测遮挡物体。大陆集团曾提到基于其 ARS430 毫米波 雷达的经验,这类遮挡车辆大约在 40%的场景中可以被发现。当然其探测遮挡物体 的性能表现也基于一些条件,如道路表面情况、前车的位置、以及被遮挡车辆的位 置等。而算法对于此类场景的探测尤为重要,华为在其 4D 毫米波雷达发布会上也 着重提到了这一点。
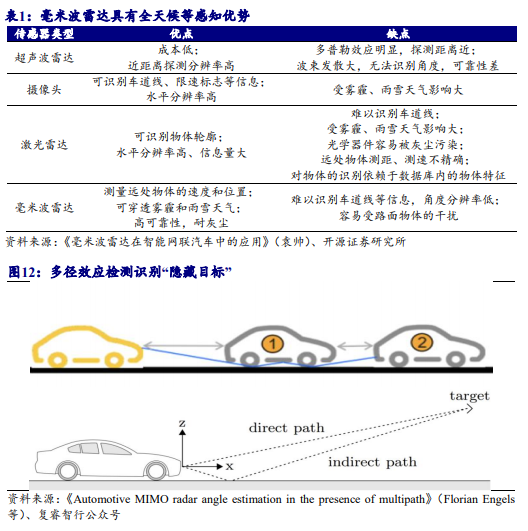
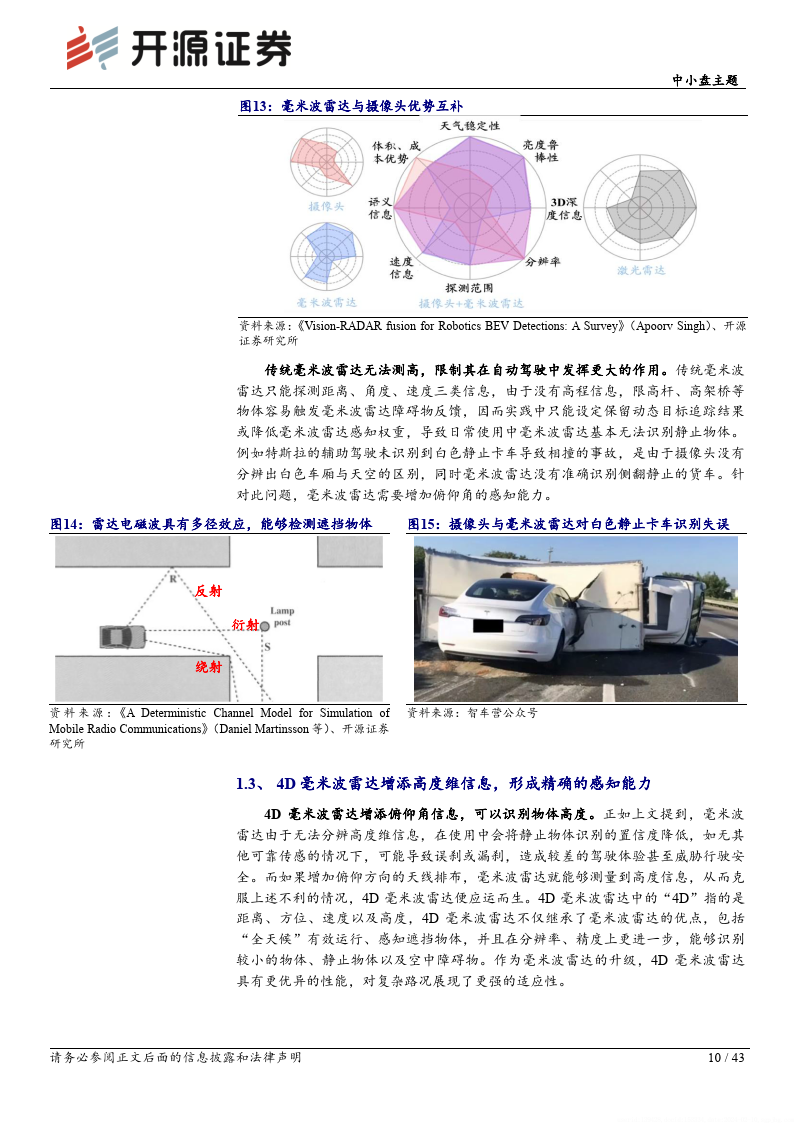
摄像头与毫米波雷达能够形成感知系统上的优势互补。摄像头是被动感知传感 器,具有成本低、易于集成、语义信息丰富等特点,并且摄像头是数据带宽最高的 车载传感器之一,可以提供高分辨率图像与实时视觉信息,但是摄像头容易受到恶 劣天气、眩光等环境的影响,没有精确的物体深度信息与速度信息。毫米波雷达在摄像头所不足的方面可以提供有效补充,两类传感器融合则能以较低的成本实现性 能更好的自动驾驶感知。

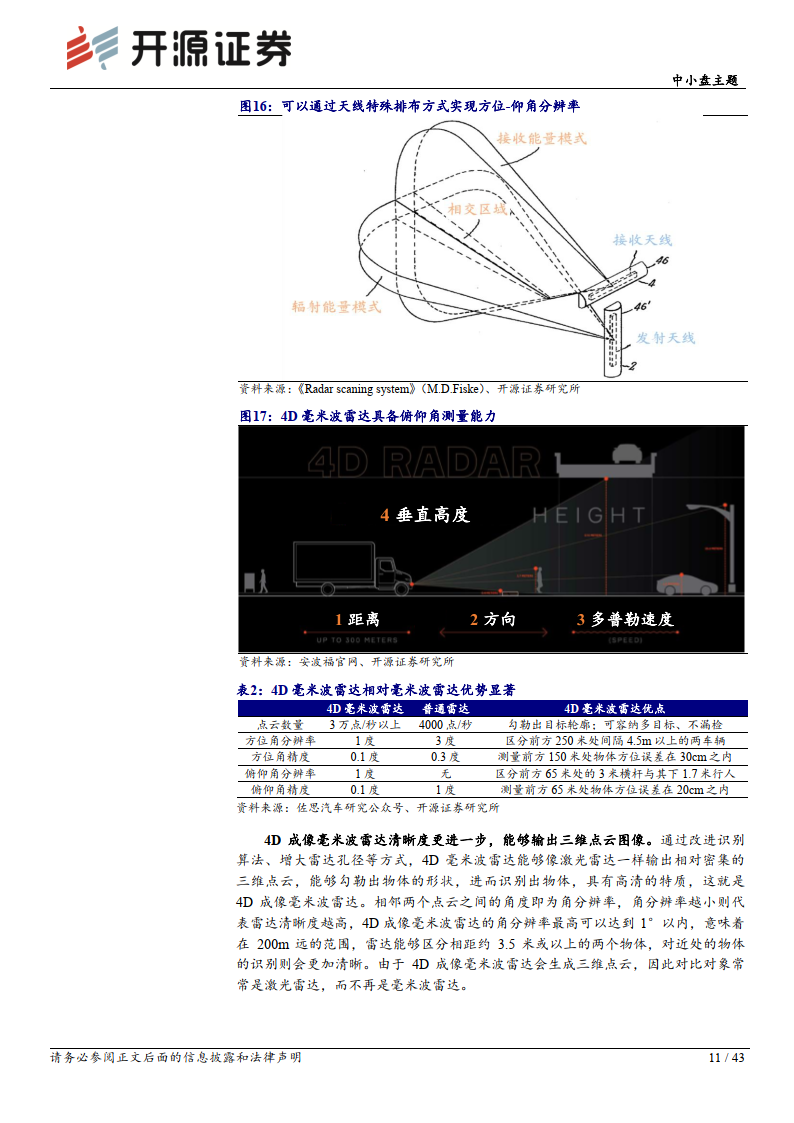
传统毫米波雷达无法测高,限制其在自动驾驶中发挥更大的作用。传统毫米波 雷达只能探测距离、角度、速度三类信息,由于没有高程信息,限高杆、高架桥等 物体容易触发毫米波雷达障碍物反馈,因而实践中只能设定保留动态目标追踪结果 或降低毫米波雷达感知权重,导致日常使用中毫米波雷达基本无法识别静止物体。 例如特斯拉的辅助驾驶未识别到白色静止卡车导致相撞的事故,是由于摄像头没有分辨出白色车厢与天空的区别,同时毫米波雷达没有准确识别侧翻静止的货车。针 对此问题,毫米波雷达需要增加俯仰角的感知能力。




报告共计:43页
相关文章:
智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助
今天分享的是智能汽车系列深度研究报告:《智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助》。 (报告出品方:开源证券) 报告共计:43页 视觉感知最佳辅助——4D 成像毫米波雷达 感知是自动…...

docker 3.1 镜像
docker 3.1 镜像命令 拉取镜像 docker pull debian #从 Docker Hub 拉取名为 debian 的镜像docker pull hello-world #从 Docker Hub 拉入名为 hello-world 的镜像 运行镜像/容器 docker run hello-world 查看本地所有的镜像 docker images 容器生成镜像…...
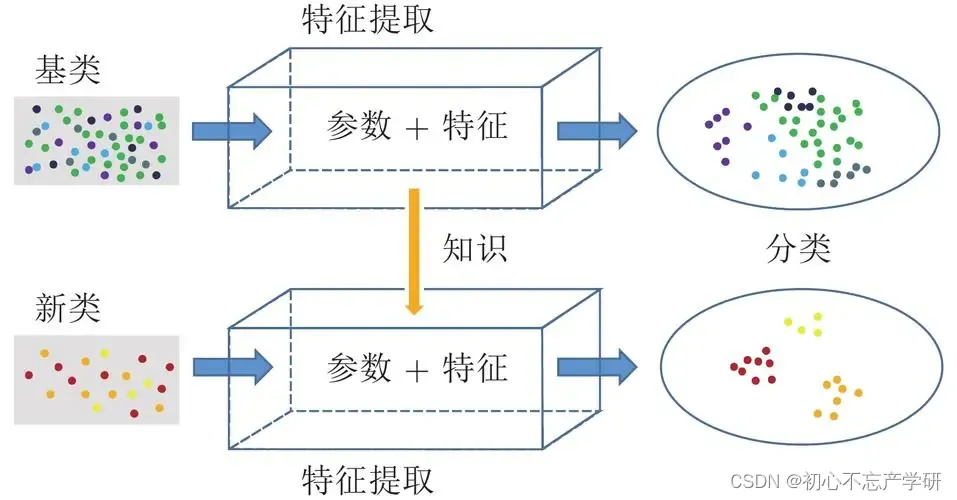
如何在极低成本硬件上落地人工智能算法 —— 分布式AI
一、背景 分布式AI的发展前景非常广阔,随着5G、6G等高速网络通信技术的普及和边缘计算能力的提升,以及AI算法和硬件的不断优化进步,分布式AI将在多个领域展现出强大的应用潜力和市场价值: 1. **物联网(IoT࿰…...
机器学习:ROC曲线笔记
ROC曲线(Receiver Operating Characteristic Curve)是一种用于评估二分类模型性能的图形化工具,主要用于展示在不同阈值(Threshold)下模型的真阳性率(True Positive Rate,TPR)和假阳…...
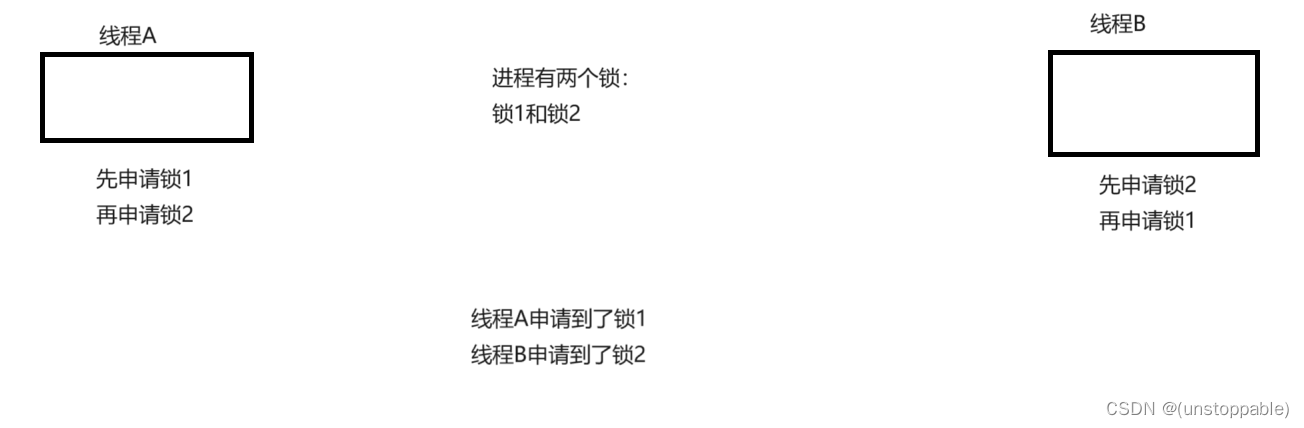
【lesson54】线程互斥
文章目录 线程互斥 线程互斥 互斥量mutex 大部分情况,线程使用的数据都是局部变量,变量的地址空间在线程栈空间内,这种情况,变量归属单个线程,其他线程无法获得这种变量。但有时候,很多变量都需要在线程间…...

Android14音频进阶:MediaPlayerService如何启动AudioTrack 上篇(五十五)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 优质专栏:多媒体系统工程师系列【原创干货持续更新中……】🚀 人生格言: 人生从来没有捷径,只…...
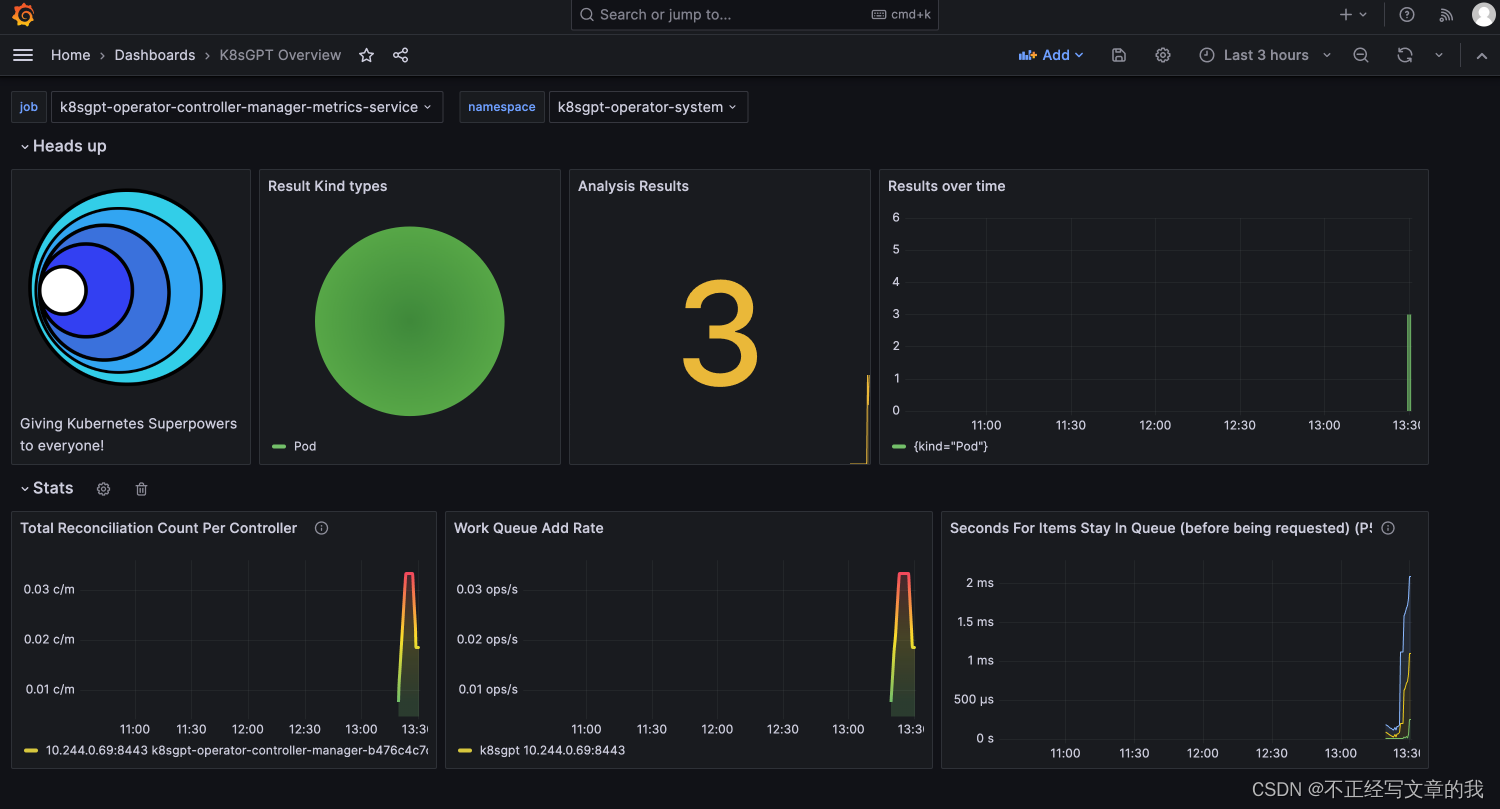
K8sGPT 的使用
K8sGPT 介绍 k8sgpt 是一个扫描 Kubernetes 集群、诊断和分类问题的工具。它将 SRE 经验编入其分析器中,并帮助提取最相关的信息,通过人工智能来丰富它。它还可以与 OpenAI、Azure、Cohere、Amazon Bedrock 和本地模型结合使用。 K8sGPT Github 地址 …...

《CSS 简易速速上手小册》第4章:视觉美学(2024 最新版)
文章目录 4.1 颜色理论在 CSS 设计中的应用:网页的调色盘4.1.1 基础知识4.1.2 重点案例:创建一个具有情感设计的登录页面4.1.3 拓展案例 1:使用颜色增强信息的可视化表示4.1.4 拓展案例 2:利用颜色创建网站的品牌身份 4.2 字体与文…...

设计模式浅析
一、设计模式的使用场景 设计模式(Design Patterns)是在软件开发中经过验证的最佳实践,用于解决常见的设计问题。它们提供了一种可复用的解决方案,可以帮助开发人员提高代码质量、可维护性和可重用性。设计模式的采用通常在以下情…...
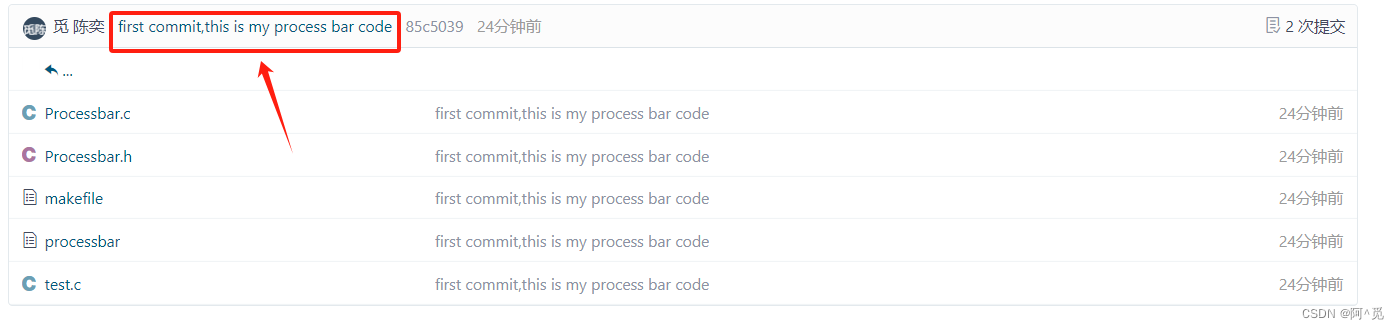
Linux环境中的git
目录 1.要使用git,首先要安装git 2.首次使用git需要做的操作 3.git操作 1.要使用git,首先要安装git 指令:sudo yum install -y git 2.首次使用git需要做的操作 在gitee网页,在你的仓库中找到: 先将下面两行代码分别…...
单测的思路
文章目录 单测的定义方法的单测几种生成工具的对比生成步骤 接口的单测场景的单测总结参考 单测的定义 单元测试(Unit Testing)是一种软件开发中的测试方法,它的主要目的是确保软件中的最小可测试单元(通常是函数、方法或类&…...
Linux内核与驱动面试经典“小”问题集锦(6)
接前一篇文章:Linux内核与驱动面试经典“小”问题集锦(5) 问题8 问:如何判断一个数是否是2的幂次(假设最多32位)? 备注:此问题是笔者年前参加小米面试时遇到的一个问题,…...
-钉钉告警企业微信配置)
【zabbix】(四)-钉钉告警企业微信配置
前提条件: 已经安装了Python3环境(脚本需要requests模块)。Centos7.x自带Python2(不含requests模块) 钉钉告警配置 一 安装Python3 参考该优秀文档部署 查看Python的模块:pip list / pip3 list 报错 …...
python-自动化篇-办公-一键将word中的表格提取到excel文件中
文章目录 代码 工作中,经常需要将Word文档中的表格粘贴到Excel文件中,以便汇总及分析。一个一个复制粘贴,非常不方便,还是Python自动化操作,省心省力。要求如下图所示,即将word中的所有表格,转存…...
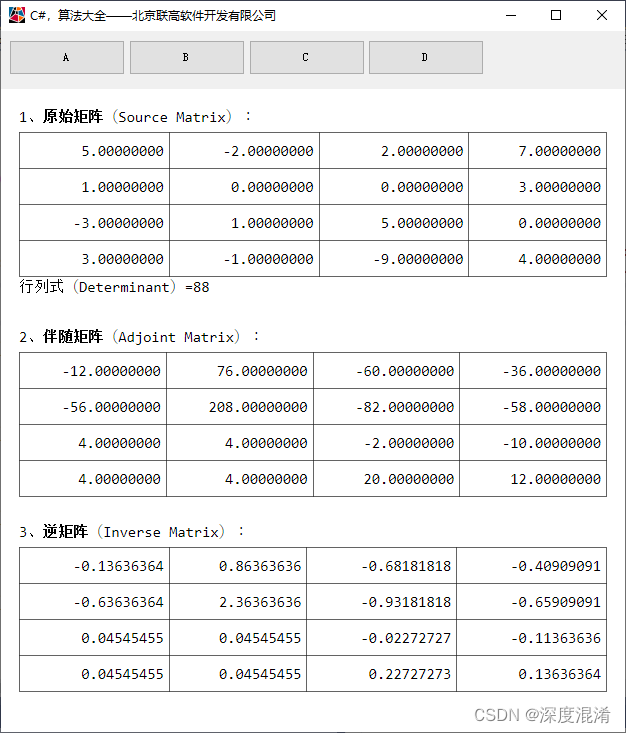
C#,数值计算,矩阵的行列式(Determinant)、伴随矩阵(Adjoint)与逆矩阵(Inverse)的算法与源代码
本文发布矩阵(Matrix)的一些初级算法。 一、矩阵的行列式(Determinant) 矩阵行列式是指矩阵的全部元素构成的行列式,设A(a)是数域P上的一个n阶矩阵,则所有A(a)中的元素组成的行列式称为矩阵A的行列式&…...
人工智能|推荐系统——基于tensorflow的个性化电影推荐系统实战(有前端)
代码下载: 基于tensorflow的个性化电影推荐系统实战(有前端).zip资源-CSDN文库 项目简介: dl_re_web : Web 项目的文件夹re_sys: Web app model:百度云下载之后,把model放到该文件夹下recommend: 网络模型相…...
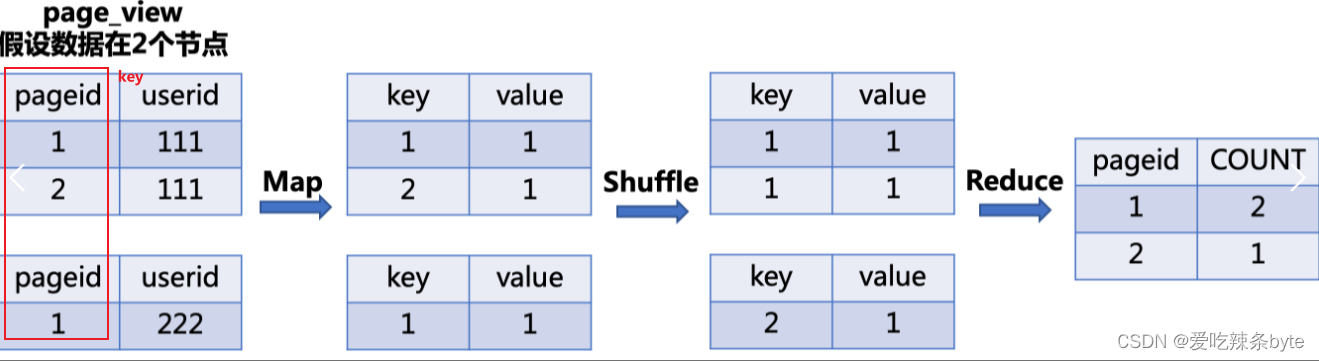
Hive SQL编译成MapReduce任务的过程
目录 一、架构及组件介绍 1.1 Hive底层架构 1.2 Hive组件 1.3 Hive与Hadoop交互过程 二、Hive SQL 编译成MR任务的流程 2.1 HQL转换为MR源码整体流程介绍 2.2 程序入口—CliDriver 2.3 HQL编译成MR任务的详细过程—Driver 2.3.1 将HQL语句转换成AST抽象语法树 词法、语…...

【C++】快速上手map、multimap、set、multiset
文章目录 一、前言二、set / multiset1. 常见应用2. 核心操作 三、map / multimap1. 常见应用2. 核心操作 一、前言 S T L STL STL 中的关联式容器分为树型结构和哈希结构,树型结构主要有四种: s e t set set、 m u l t i s e t multiset multiset、 m a…...
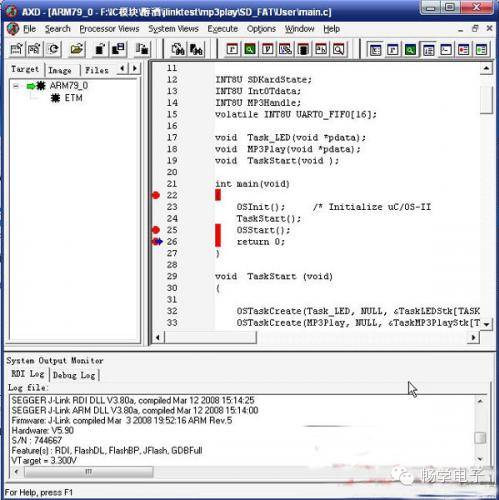
【分享】图解ADS+JLINK调试ARM
文章是对LPC2148而写的,但是对三星的44B0芯片同样适用,只需要在选择时将相应的CPU选择的S3C44B0就可以了。 JLINK在ADS下调试心得 前两天一个客户用jlink在ADS下调试LPC2148总报错,这个错误我之前在调试LPC2200的时候也碰到过,后…...

反无人机系统技术分析,无人机反制技术理论基础,无人机技术详解
近年来,经过大疆、parrot、3d robotics等公司不断的努力,具有强大功能的消费级无人机价格不断降低,操作简便性不断提高,无人机正快速地从尖端的军用设备转入大众市场,成为普通民众手中的玩具。 然而,随着消…...
)
浏览器访问 AWS ECS 上部署的 Docker 容器(监听 80 端口)
✅ 一、ECS 服务配置 Dockerfile 确保监听 80 端口 EXPOSE 80 CMD ["nginx", "-g", "daemon off;"]或 EXPOSE 80 CMD ["python3", "-m", "http.server", "80"]任务定义(Task Definition&…...

HTML 语义化
目录 HTML 语义化HTML5 新特性HTML 语义化的好处语义化标签的使用场景最佳实践 HTML 语义化 HTML5 新特性 标准答案: 语义化标签: <header>:页头<nav>:导航<main>:主要内容<article>&#x…...

在四层代理中还原真实客户端ngx_stream_realip_module
一、模块原理与价值 PROXY Protocol 回溯 第三方负载均衡(如 HAProxy、AWS NLB、阿里 SLB)发起上游连接时,将真实客户端 IP/Port 写入 PROXY Protocol v1/v2 头。Stream 层接收到头部后,ngx_stream_realip_module 从中提取原始信息…...
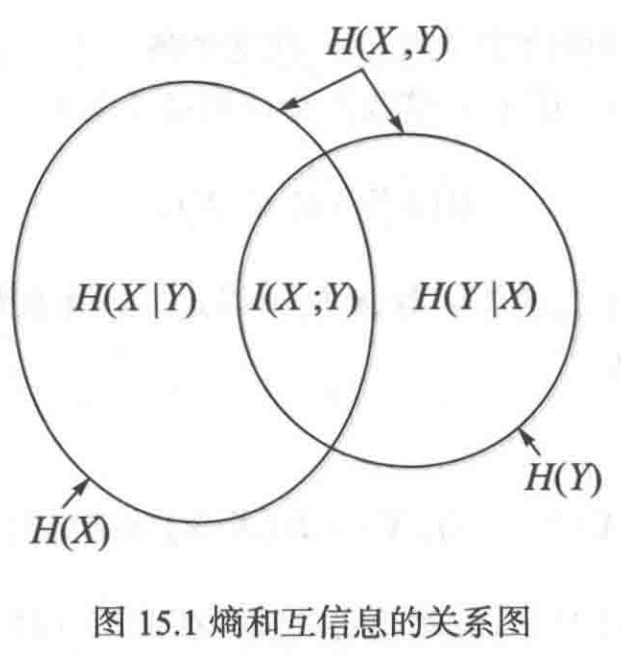
《通信之道——从微积分到 5G》读书总结
第1章 绪 论 1.1 这是一本什么样的书 通信技术,说到底就是数学。 那些最基础、最本质的部分。 1.2 什么是通信 通信 发送方 接收方 承载信息的信号 解调出其中承载的信息 信息在发送方那里被加工成信号(调制) 把信息从信号中抽取出来&am…...

ETLCloud可能遇到的问题有哪些?常见坑位解析
数据集成平台ETLCloud,主要用于支持数据的抽取(Extract)、转换(Transform)和加载(Load)过程。提供了一个简洁直观的界面,以便用户可以在不同的数据源之间轻松地进行数据迁移和转换。…...
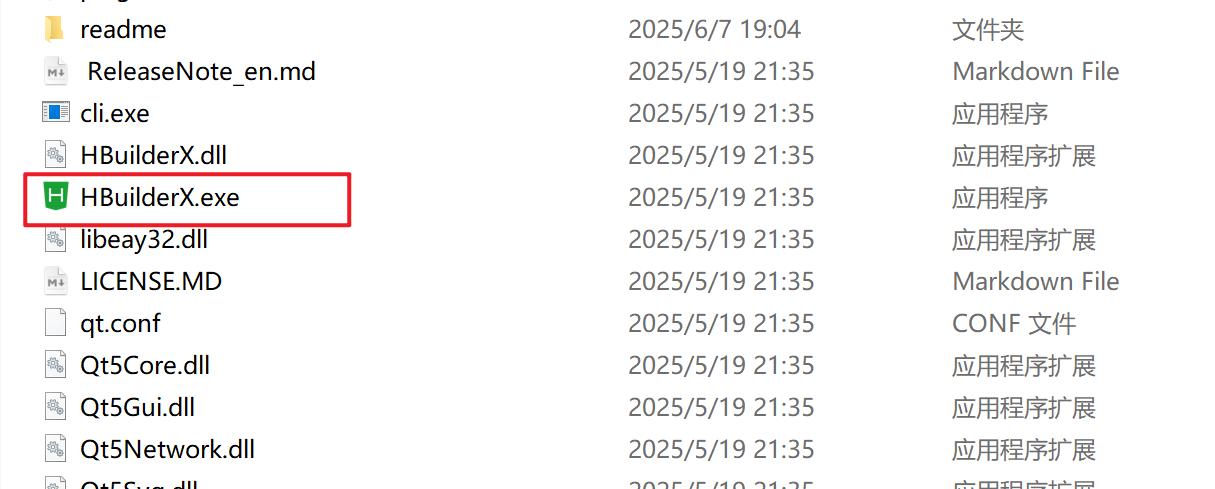
HBuilderX安装(uni-app和小程序开发)
下载HBuilderX 访问官方网站:https://www.dcloud.io/hbuilderx.html 根据您的操作系统选择合适版本: Windows版(推荐下载标准版) Windows系统安装步骤 运行安装程序: 双击下载的.exe安装文件 如果出现安全提示&…...

Spring AI 入门:Java 开发者的生成式 AI 实践之路
一、Spring AI 简介 在人工智能技术快速迭代的今天,Spring AI 作为 Spring 生态系统的新生力量,正在成为 Java 开发者拥抱生成式 AI 的最佳选择。该框架通过模块化设计实现了与主流 AI 服务(如 OpenAI、Anthropic)的无缝对接&…...
自然语言处理——Transformer
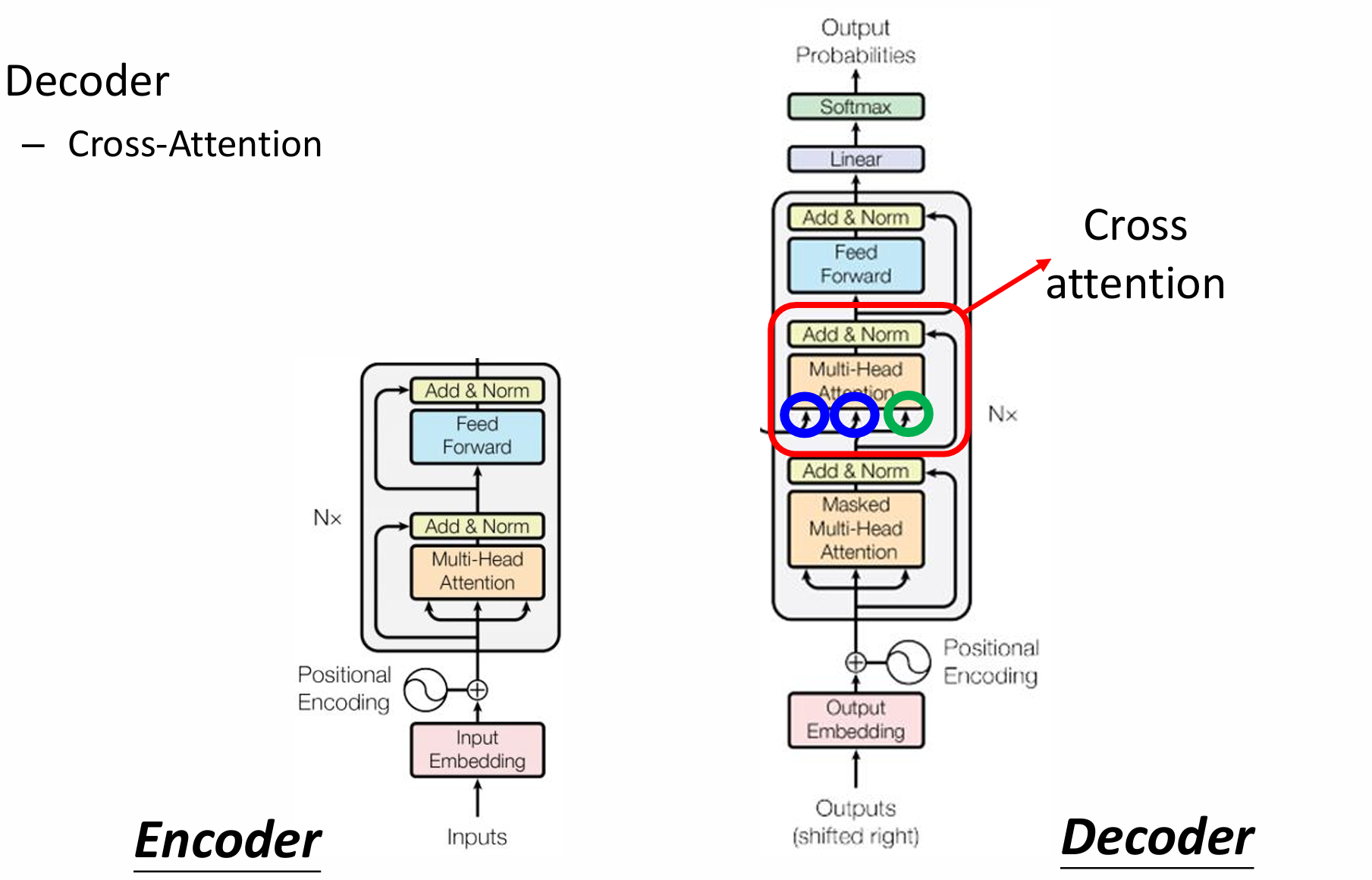
自然语言处理——Transformer 自注意力机制多头注意力机制Transformer 虽然循环神经网络可以对具有序列特性的数据非常有效,它能挖掘数据中的时序信息以及语义信息,但是它有一个很大的缺陷——很难并行化。 我们可以考虑用CNN来替代RNN,但是…...
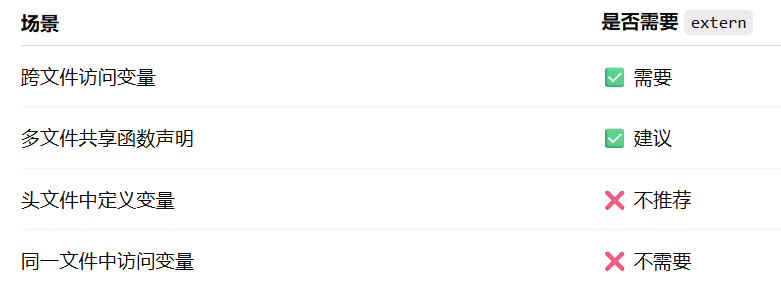
深入解析C++中的extern关键字:跨文件共享变量与函数的终极指南
🚀 C extern 关键字深度解析:跨文件编程的终极指南 📅 更新时间:2025年6月5日 🏷️ 标签:C | extern关键字 | 多文件编程 | 链接与声明 | 现代C 文章目录 前言🔥一、extern 是什么?&…...

安宝特方案丨船舶智造的“AR+AI+作业标准化管理解决方案”(装配)
船舶制造装配管理现状:装配工作依赖人工经验,装配工人凭借长期实践积累的操作技巧完成零部件组装。企业通常制定了装配作业指导书,但在实际执行中,工人对指导书的理解和遵循程度参差不齐。 船舶装配过程中的挑战与需求 挑战 (1…...