高速自动驾驶智慧匝道(HIC)系统功能规范
智慧匝道功能规范
Highway Intelligent Change Functional Specification
| 文件状态: 【√】草稿 【】正式发布 【】正在修改 |
| 文件起草分工 撰写: 审核: |
| 编制: | 签名: | 日期: |
| 审核: | 签名: | 日期: |
| 批准: | 签名: | 日期: |
| 版本 | 更改描述 | 更改日期 | 更改人 |
目录
1 概述... 6
1.1 目的... 6
1.2 范围... 6
2 功能规范... 6
2.1 功能描述... 6
2.1.1 功能用途... 7
2.1.2 基本参数... 7
2.1.3 运行设计区域ODD.. 7
2.2 感知需求及方案... 11
2.2.1 Sensor Fusion需求... 11
2.2.2 Sensor Lanes需求... 12。
2.2.3 Reference Line需求... 13。
2.2.4 传感器方案... 13
2.3 整车及执行器方案... 13
2.3.1 整车需求... 13
2.3.2 纵向控制执行器需求... 13
2.3.3 横向控制执行器需求... 14
2.4 接口描述... 14
2.4.1 输入信号... 14
2.4.2 输出信号... 15
2.5 人机交互方案描述... 15
2.5.1 按键方案描述... 15
2.5.2 仪表显示方案描述... 15
3 使用场景描述... 15
3.1 功能典型场景——基本场景... 15
3.1.1 匝道内行驶... 15
3.1.2 匝道分流车道... 31
3.1.3 匝道合流车道... 36
3.1.4 从匝道进入高速... 44
3.1.5 从高速进入匝道... 46
3.2 功能典型场景——特殊场景... 49
3.2.1 功能不适用场景... 56
3.2.2 补充说明... 56
4 功能状态机及基本操作... 56
4.1 HIC功能状态机图... 56
4.2 HIC功能工作状态... 57
4.3 HIC功能状态跳转及基本操作... 57
5 功能点描述... 58
5.1 高速待转... 58。
5.2 巡航控制... 58
5.3 跟车控制... 58
5.4 Stop & Go. 58
5.5 多目标机制... 58
5.6 自车超控... 59。
5.7 目标车异常消失处理机制... 61
- 概述
- 目的
本文档的目的是描述高速公路上下匝道(Highway Change),服务区进出匝道及高速间交通匝道行驶控制功能的技术规范和设计说明。
-
- 范围
本文档适用于特定场景高速公路范围内的CL4级自动驾驶系统。
-
-
-
- 术语及缩写
-
-
智慧匝道Highway Intelligent Change HIC
-
-
-
- 设计与实验标准
- 设计标准
- 设计标准-非法规类
- 设计标准-法规类
-
-
- 功能规范
- 功能描述
| 序号 | 类别 | 名称 | 发布日期 |
| 1 | ISO | ISO 15622-2010:Intelligent transport systems — Cruise Controlled systems —Performance requirements and test procedures | 2010-04-15 |
| 2 | ISO | ISO 22179-2009:Intelligent transport systems — Full speed range adaptive cruise Controlled (FSRA) systems — Performance requirements and test procedures | 2009-09-01 |
| 3 | GB | GB 20608-2006:智能运输系统——自适应巡航控制系统性能要求与检测方法 GB 20608-2006:Intelligent Transportation System——Performance Requirements and Detection Method of Adaptive Cruise Control System | 2006-11-07 |
在高速公路匝道情况下,该系统执行纵向和横向驾驶任务。适用于收费站至高速入口,高速出口至收费站,进出服务区及高速公路间交通线等路段。
-
-
- 功能用途
-
在车辆行驶过程中,如有上下高速、高速间交通线等工况,此功能会自动启用并自动控制车辆完成上下匝道的操作。
一般情况下所有操作自动进行,但是根据实际情况,司机可随时接管车辆。
-
-
- 基本参数
-
| 序号 | 项目 | 设定值 | 单位 | 备注 |
| 1 | 工作车速范围 | 0-80km/h | km/h | 可根据具体车型调整 |
| 2 | 最大起效车速 | 80km/h | km/h | |
| 3 | 最大失效车速 | 90km/h | km/h | |
| 4 | 最大设定巡航车速 | 80km/h | km/h | |
| 最大加速度 | 1.5 | m/s2 | ||
| 最大减速度 | -3.5 | m/s2 | ||
| 5 | 最小转弯半径 | 25m | m | |
| 6 | 跟车时距 | [1.5 2.3 3.1 3.9] | s | ACC 跟车控制的稳态跟车时距,安全考虑,跟车时距大于乘用车 |
| 7 | 目标识别距离区间 | 3~800 | m | |
| 8 | 目标识别速度区间 | -130~120 | km/h | |
| 9 | 自动跟停距离 | 6±2 | m | |
| 10 | HIC _SetSpeed_Min | 0 | km/h | ACC 最小设定巡航车速 |
| 11 | HIC _SetSpeed_Max | 80 | km/h | ACC 最大设定巡航车速 |
| 12 | HIC _SetSpeed_StepS | 5 | km/h | ACC 巡航车速调节步长(短按) |
| 13 | HIC_SetSpeed_StepL | 1 | km/h | ACC 巡航车速调节步长(长按) |
| 14 | HIC_SetSpeed_TLongPress | 800 | ms | ACC 巡航车速调节长按时间阈值 |
| 15 | HIC _SetSpeed_TShortPress | 30 | ms | ACC 巡航车速调节短按时间阈值 |
完整版功能规范点击如下链接下载:
https://download.csdn.net/download/weixin_45905610/88850318
高速自动驾驶智慧匝道(HIC)系统功能规范资源-CSDN文库
相关文章:
系统功能规范)
高速自动驾驶智慧匝道(HIC)系统功能规范
智慧匝道功能规范 Highway Intelligent Change Functional Specification 文件状态: 【√】草稿 【】正式发布 【】正在修改 文件起草分工 撰写: 审核: 编制: 签名: 日期: 审核: 签名&am…...
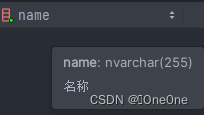
SQL Server——建表时为字段添加注释
在 MySQL 中,新建数据库表为字段添加注释可以使用 comment 属性来实现。SQL Server 没有 comment 属性,但是可以通过执行 sys.sp_addextendedproperty 这个存储过程添加扩展属性来实现相同的功能。 这个存储过程的参数定义如下: exec sys.s…...

【明道云】导入Excel数据时的默认顺序
【背景】 明道云导入Excel过程中由于数据问题往往会有一些需要补录的地方。这种情况下就需要已上传到线上的数据和本地Excel的记录顺序完全一致才方便对比。因此需要清除如何让两者的记录顺序一致。 【分析】 经过多次排序对比,考虑到分页的影响,发现…...

几种后端开发中常用的语言。
几种后端开发中常用的语言。 C/C 语言 C 语言最初是用于系统开发工作,特别是组成操作系统的程序。由于 C 语言所产生的代码运行速度与汇编语言编写的代码运行速度几乎一样,所以采用 C 语言作为系统开发语言。目前,C 语言是最广泛使用的系统…...

Sora——探索AI视频模型的无限可能
Sora - 探索AI视频模型的无限可能 Sora作为OpenAI发布的一款AI视频模型,其探索的无限可能性表现在多个方面。首先,从技术的角度来看,Sora将文本生成图像的技术扩展到了视频领域,实现了从文字描述到视频内容的自动生成。这种技术突…...
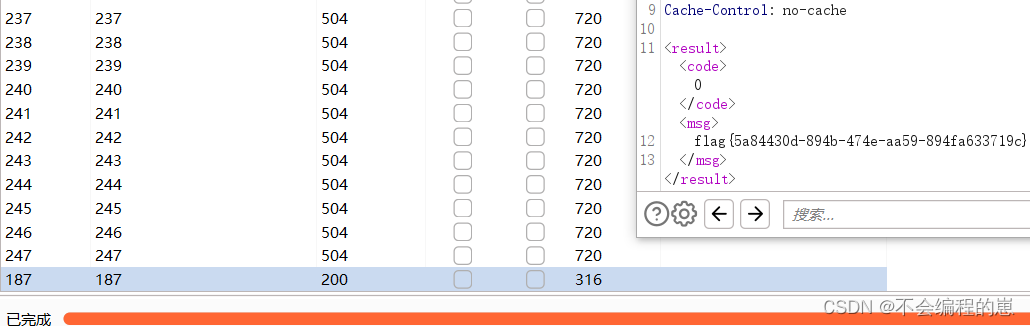
[NCTF2019]True XML cookbook --不会编程的崽
题目的提示很明显了,就是xxe攻击,直接抓包。 <?xml version "1.0"?> <!DOCTYPE ANY [ <!ENTITY xxe SYSTEM "file:///etc/passwd" > ]> <user><username> &xxe; </username><passwor…...

Qt 应用程序中指定使用桌面版本的 OpenGL或嵌入式系统OpenGL ES的 API 进行渲染
qputenv(“QT_OPENGL”, “desktop”) 是用于在 Qt 应用程序中指定使用桌面版本的 OpenGL API 进行渲染。 具体来说,qputenv 是 Qt 提供的一个环境变量设置函数,它允许开发者在程序运行时设置环境变量。在这个例子中,环境变量 QT_OPENGL 被设…...

大数据软件,待补充
数据采集: 实时采集: Debezuim Debezuim是构建在 Apach Kafka之上,并提供Kafka连接器来监视特定的数据库管理(采集多种数据库) Canal canal 是阿里开发,用于实时采集Mysql 当中变化的数据 maxwell,flinkX,flinkCDC 离线采集&#…...

深入探索pdfplumber:从PDF中提取信息到实际项目应用【第94篇—pdfplumbe】
深入探索pdfplumber:从PDF中提取信息到实际项目应用 在数据处理和信息提取的过程中,PDF文档是一种常见的格式。然而,要从PDF中提取信息并进行进一步的分析,我们需要使用适当的工具。本文将介绍如何使用Python库中的pdfplumber库来…...
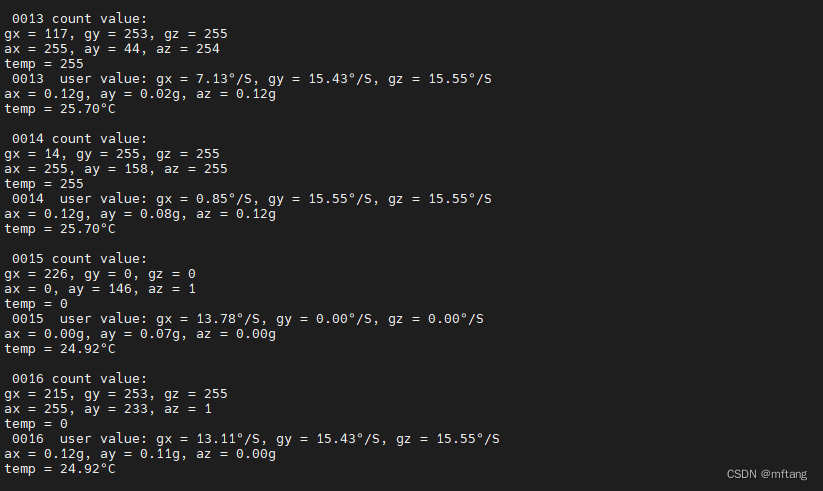
实现linux platform tree框架下ICM20608驱动开发(SPI)
目录 概述 1 硬件接口 2 添加ICM20608的设备树信息 2.1 使用i.MX Pins Tool v6配置SPI引脚 2.2 配置设备树 2.3 编译.dts 2.4 在板卡中更新设备树 3 编写驱动程序 3.1 创建设备匹配表 3.2 重要函数介绍 3.2.1 初始化函数 3.2.2 写寄存器函数 3.2.3 读寄存器函数 …...

在前端开发中需要考虑的常见web安全问题和攻击原理以及防范措施
文章目录 一、XSS攻击1、反射型XSS攻击原理2、DOM型XSS攻击原理3、存储型XSS攻击原理 防范措施 二、CSRF攻击攻击原理:防范措施: 三、点击劫持攻击原理:防范措施: 四、项目中如何预防安全问题 随着互联网的发展,Web应用…...

年关将至送大礼 社区适时献爱心
在这个快节奏的时代,社区作为人们生活的重要组成部分,其凝聚力和互助精神显得尤为重要。2024年2月7日,实践队员李若钰有幸参与了社区礼盒分装的活动,这不仅仅是一次简单的劳动,更是一次心灵的洗礼和感悟。 礼盒分装&am…...

singularity容器的技术基础
Singularity容器技术是专为科学计算、数据密集型工作和高性能计算(HPC)环境设计的。与其他容器技术如Docker相比,Singularity提供了一些独特的特性和设计考虑,使其在科学和研究社区中受到欢迎。以下是Singularity容器技术的一些关…...
)
jax可微分编程的笔记(2)
jax可微分编程的笔记(2) 第2章 自动微分 自动微分和符号求导有诸多的相似之处:它们同样依赖于计算图 的构建,同样依赖于求导的递归实现。从某种意义上来说,它们 甚至有完全相同的数据结构。不过,二者的区…...
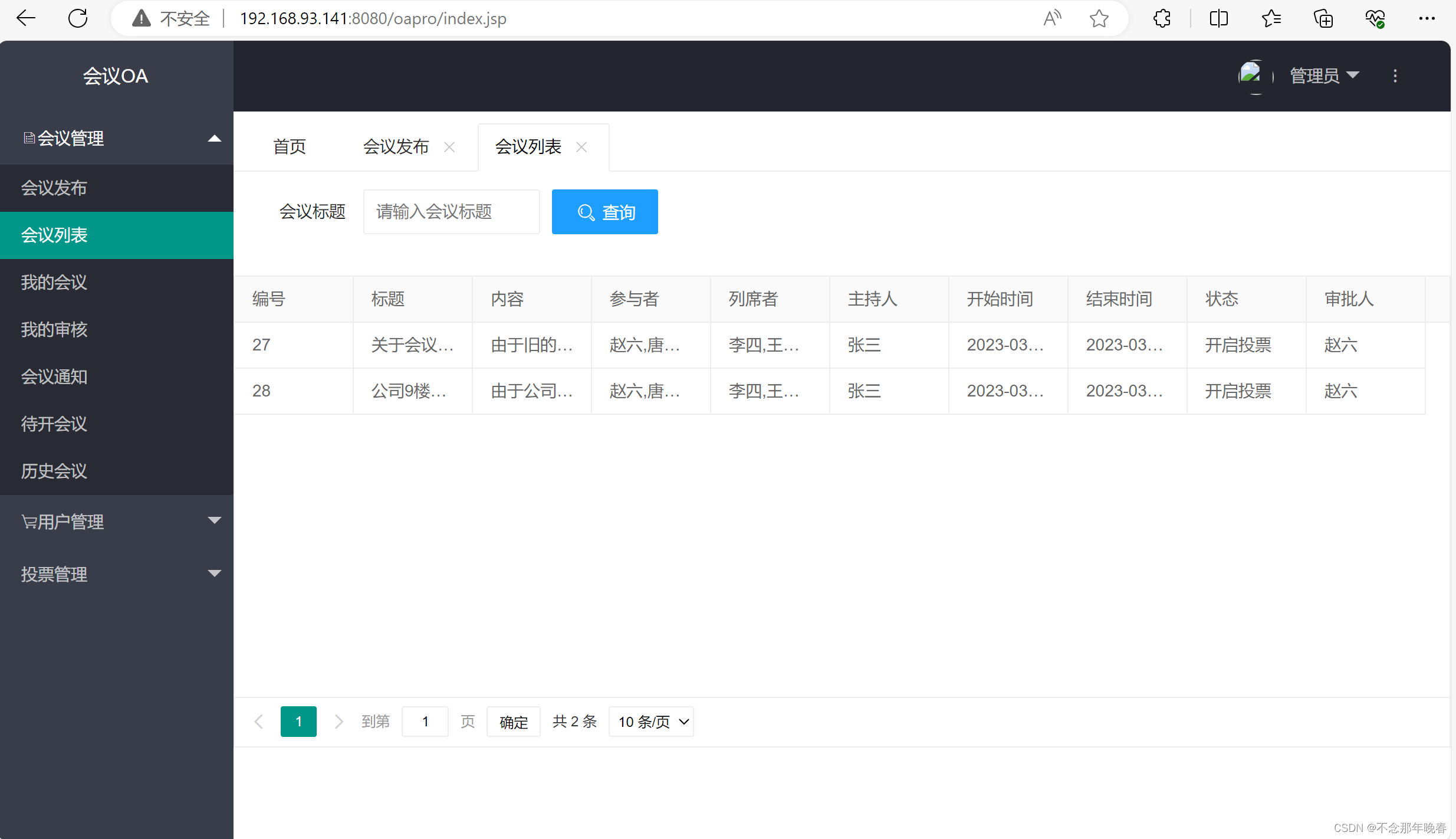
在Linux服务器上部署一个单机项目
目录 一、jdk安装 二、tomcat安装 三、MySQL安装 四、部署项目 一、jdk安装 1. 上传jdk安装包 jdk-8u151-linux-x64.tar.gz 进入opt目录,将安装包拖进去 2. 解压安装包 这里需要解压到usr/local目录下,在这里我新建一个文件夹保存解压后的文件 [r…...
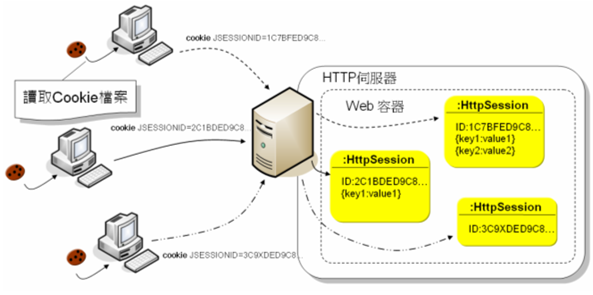
HTTP概要
文章目录 什么是HTTP?URL的结构请求报文结构请求方法GETHEADPOSTPUTDELETETRACEOPTIONSCONNECTPATCH解释 请求头字段 响应报文结构响应状态响应头字段 HTTP会话3次握手无状态协议 什么是HTTP? HTTP,即Hypertext Transfer Protocol(超文本传输协议) 它是一个”请…...
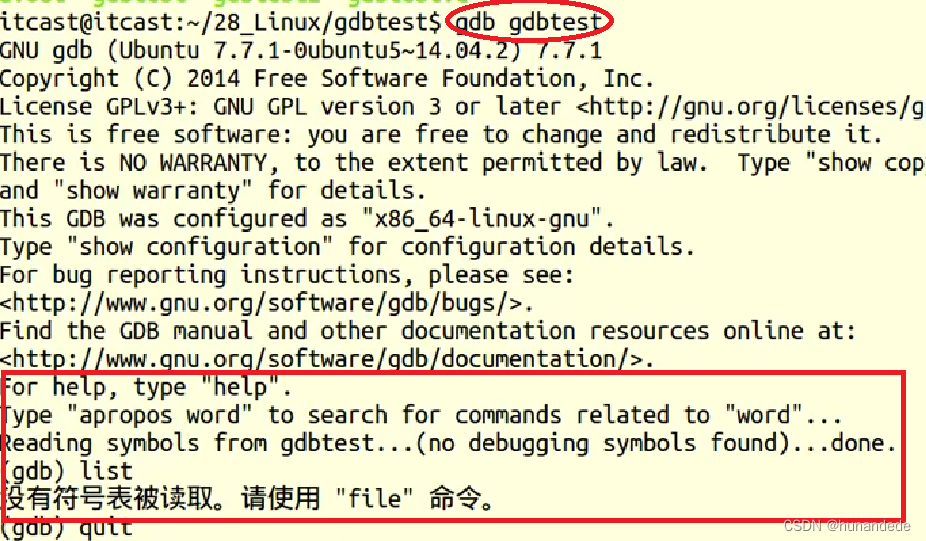
128 Linux 系统编程6 ,C++程序在linux 上的调试,GDB调试
今天来整理 GDB 调试。 在windows 上我们使用vs2017开发,可以手动的加断点,debug。 那么在linux上怎么加断点,debug呢?这就是今天要整理的GDB调试工具了。 那么有些同学可能会想到:我们在windows上开发,…...
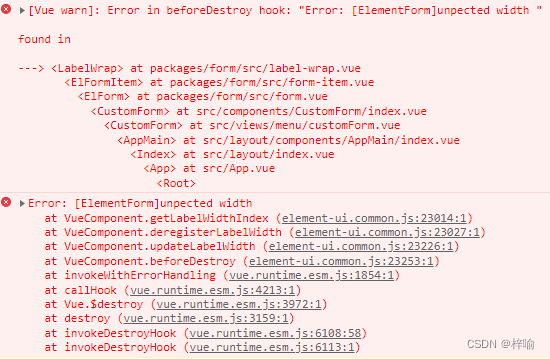
vue2的ElementUI的form表单报错“Error: [ElementForm]unpected width”修复
1. 问题 ElementUI的form表单,当动态切换显示表单时报错 Error: [ElementForm]unpected width。 翻译过来就是form表单的label宽度width出了问题。 2. 分析 参数说明类型可选值默认值label-width表单域标签的宽度,例如 ‘50px’。作为 Form 直接子元…...

Linux 网络命令指南
目录 配置IP地址和子网掩码 网络接口的详细信息 测试与目标主机的连通性 下载文件或内容 远程登录,进行远程管理和协作 CentOS / Red Hat(使用 firewalld) 关闭防火墙 开启防火墙 配置TCP端口(假设使用3306端口ÿ…...

vue3组件间的通信,通过props,emit,provide和inject把数据传递N个层级,expose和ref实现父组件调用子组件方法
文章目录 一、父组件数据传递N个层级的子组件vue3 provide 与 injectA组件名称 app.vueB组件名称 provideB.vueC组件名称 provideCSetup.vue 二、使用v-model指令实现父子组件的双向绑定父组件名称 app.vue子组件名称 v-modelSetup.vue 三、父组件props向子组件传值子组件 prop…...

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…...

应用升级/灾备测试时使用guarantee 闪回点迅速回退
1.场景 应用要升级,当升级失败时,数据库回退到升级前. 要测试系统,测试完成后,数据库要回退到测试前。 相对于RMAN恢复需要很长时间, 数据库闪回只需要几分钟。 2.技术实现 数据库设置 2个db_recovery参数 创建guarantee闪回点,不需要开启数据库闪回。…...
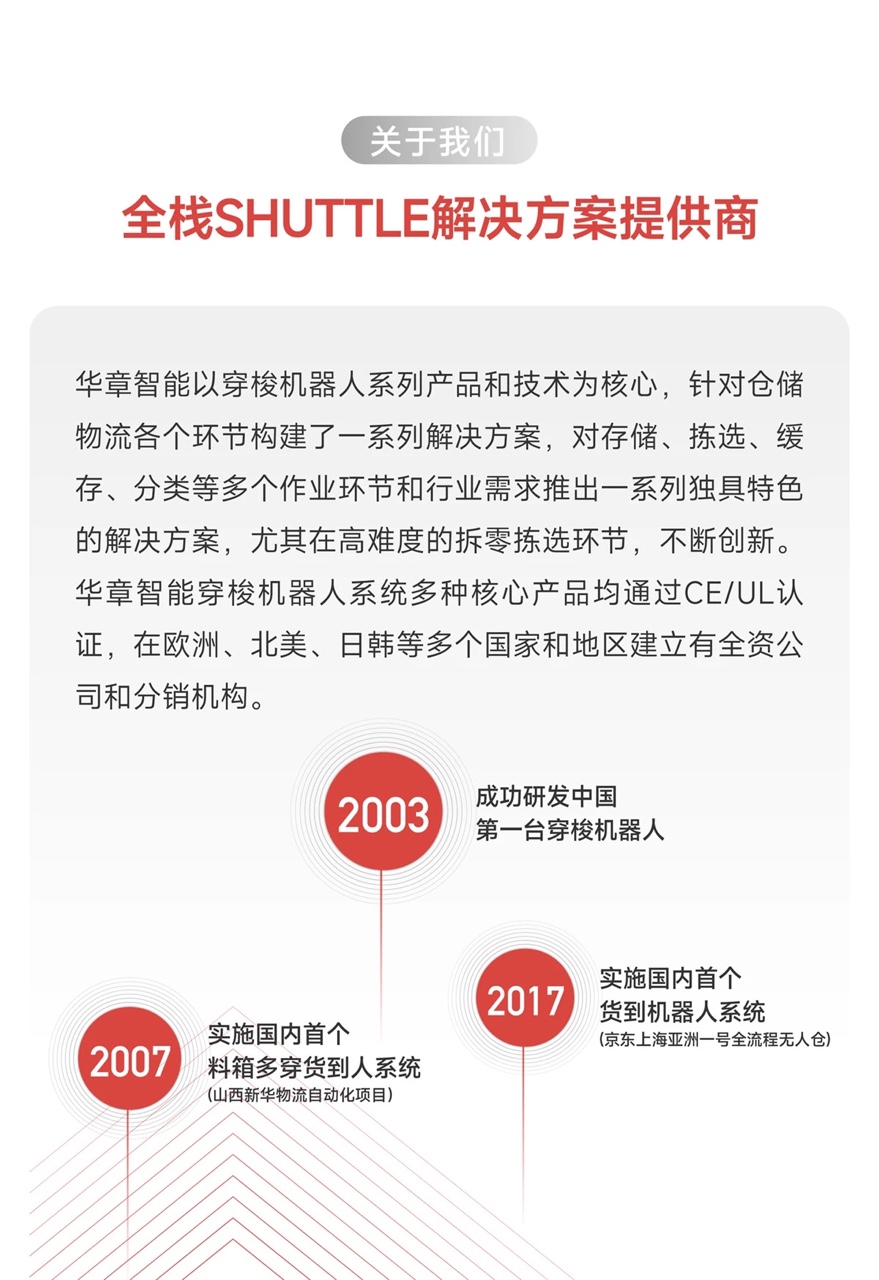
智能仓储的未来:自动化、AI与数据分析如何重塑物流中心
当仓库学会“思考”,物流的终极形态正在诞生 想象这样的场景: 凌晨3点,某物流中心灯火通明却空无一人。AGV机器人集群根据实时订单动态规划路径;AI视觉系统在0.1秒内扫描包裹信息;数字孪生平台正模拟次日峰值流量压力…...
)
Angular微前端架构:Module Federation + ngx-build-plus (Webpack)
以下是一个完整的 Angular 微前端示例,其中使用的是 Module Federation 和 npx-build-plus 实现了主应用(Shell)与子应用(Remote)的集成。 🛠️ 项目结构 angular-mf/ ├── shell-app/ # 主应用&…...

【Go语言基础【12】】指针:声明、取地址、解引用
文章目录 零、概述:指针 vs. 引用(类比其他语言)一、指针基础概念二、指针声明与初始化三、指针操作符1. &:取地址(拿到内存地址)2. *:解引用(拿到值) 四、空指针&am…...
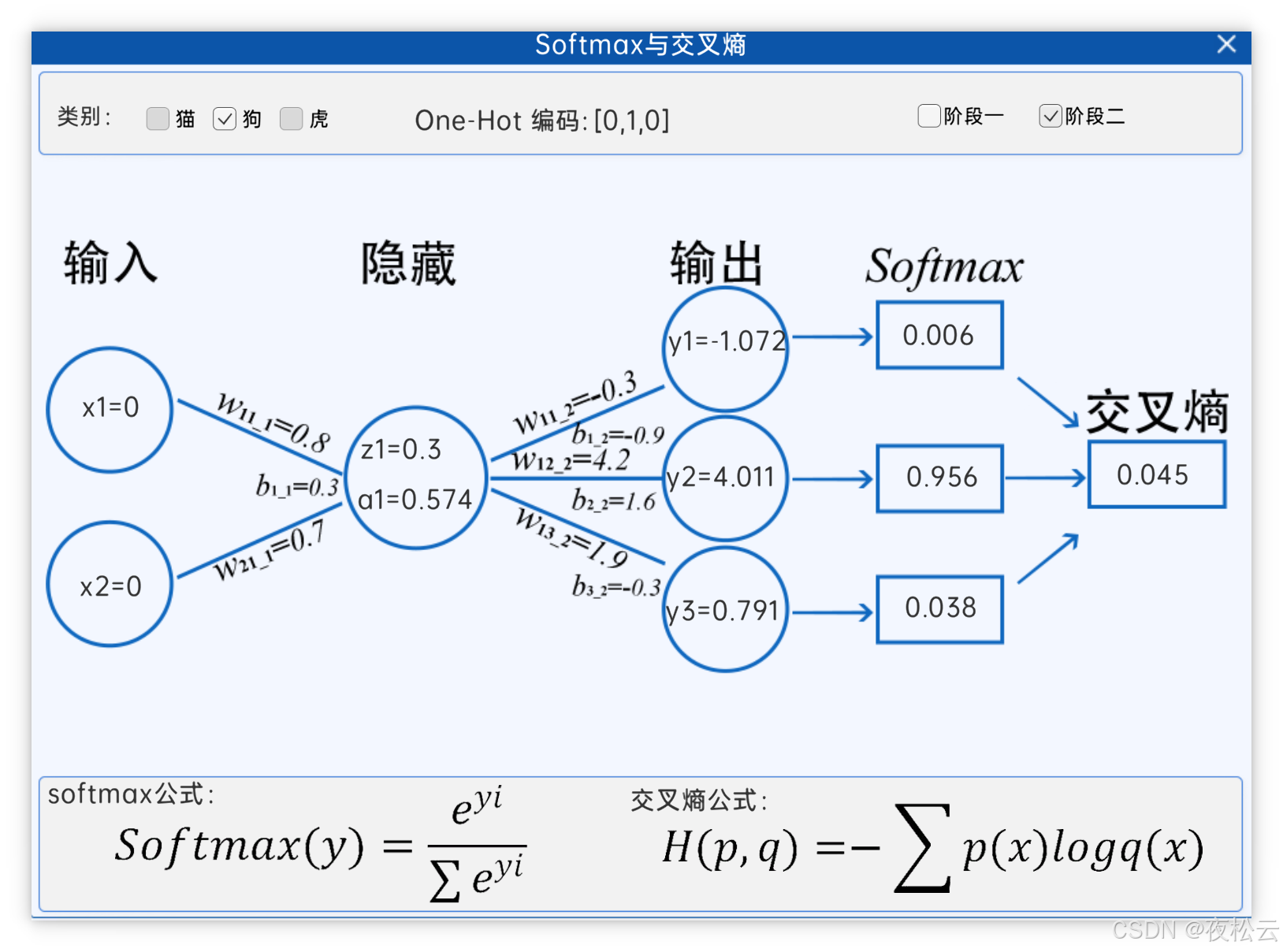
深入浅出深度学习基础:从感知机到全连接神经网络的核心原理与应用
文章目录 前言一、感知机 (Perceptron)1.1 基础介绍1.1.1 感知机是什么?1.1.2 感知机的工作原理 1.2 感知机的简单应用:基本逻辑门1.2.1 逻辑与 (Logic AND)1.2.2 逻辑或 (Logic OR)1.2.3 逻辑与非 (Logic NAND) 1.3 感知机的实现1.3.1 简单实现 (基于阈…...

【JavaSE】多线程基础学习笔记
多线程基础 -线程相关概念 程序(Program) 是为完成特定任务、用某种语言编写的一组指令的集合简单的说:就是我们写的代码 进程 进程是指运行中的程序,比如我们使用QQ,就启动了一个进程,操作系统就会为该进程分配内存…...

怎么让Comfyui导出的图像不包含工作流信息,
为了数据安全,让Comfyui导出的图像不包含工作流信息,导出的图像就不会拖到comfyui中加载出来工作流。 ComfyUI的目录下node.py 直接移除 pnginfo(推荐) 在 save_images 方法中,删除或注释掉所有与 metadata …...

PostgreSQL——环境搭建
一、Linux # 安装 PostgreSQL 15 仓库 sudo dnf install -y https://download.postgresql.org/pub/repos/yum/reporpms/EL-$(rpm -E %{rhel})-x86_64/pgdg-redhat-repo-latest.noarch.rpm# 安装之前先确认是否已经存在PostgreSQL rpm -qa | grep postgres# 如果存在࿰…...

Vue ③-生命周期 || 脚手架
生命周期 思考:什么时候可以发送初始化渲染请求?(越早越好) 什么时候可以开始操作dom?(至少dom得渲染出来) Vue生命周期: 一个Vue实例从 创建 到 销毁 的整个过程。 生命周期四个…...