ros自定义action记录
文章目录
- 自定义action
- 1. 定义action文件
- 2. 修改 package.xml
- 3. 修改 CMakeLists.txt
- 4. 运行 `catkin build`
- 5. simple_action_server.py
- 6. simple_action_client.py
- 测试
自定义action
ros 版本:kinetic
自定义test包的文件结构如下
|-- test
| |-- CMakeLists.txt
| |-- action
| | `--Timer.action
| |-- package.xml
| |-- scripts
| | |-- simple_action_server.py
| | `-- simple_action_server.py
动作定义文件后缀 .action。其组成和srv非常相似。有关自定义srv见链接。
1. 定义action文件
# the goal: to be sent by the client
duration time_to_wait
---# the result: to be sent by the server upon completion
duration time_elapsed
uint32 updates_sent
---# the feedback: to be sent periodically by the server during execution
duration time_elapsed
duration time_remaining
2. 修改 package.xml
向其中添加如下信息:
<build_depend>actionlib_msgs</build_depend><build_export_depend>actionlib_msgs</build_export_depend>
3. 修改 CMakeLists.txt
find_package(catkin REQUIRED COMPONENTSrospyroscppstd_msgsmessage_generationactionlib_msgs
)
## Generate actions in the 'action' folder
add_action_files(FILESTimer.action
)
## Generate added messages and services with any dependencies listed here
generate_messages(DEPENDENCIESactionlib_msgsstd_msgs # Or other packages containing msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES testCATKIN_DEPENDS rospy message_runtime std_msgs roscpp actionlib_msgs
# DEPENDS system_lib
)
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
catkin_install_python(PROGRAMSscripts/simple_action_server.pyscripts/simple_action_client.pyDESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
4. 运行 catkin build
动作被正确编译后会生成6个msg:TimerGoal.msg, TimerResult.msg, TimerFeedback.msg, TimerActionFeedback.msg, TimerActionGoal.msg, TimerActionResult.msg。
5. simple_action_server.py
#!/usr/bin/env pythonimport rospy
import time
import actionlib
from test.msg import TimerAction, TimerGoal, TimerResultdef do_timer(goal):start_time = time.time()time.sleep(goal.time_to_wait.to_sec())result = TimerResult()result.time_elapsed = rospy.Duration.from_sec(time.time() -start_time)result.updates_sent = 0server.set_succeeded(result)rospy.init_node("timer_action_server")
server = actionlib.SimpleActionServer("timer", TimerAction, do_timer, False) #记得写False
server.start()
rospy.spin()
chmod +x simple_action_server.py
6. simple_action_client.py
#!/usr/bin/env python
import rospyimport actionlib
from test.msg import TimerAction, TimerGoal, TimerResultrospy.init_node("timer_action_client")
client = actionlib.SimpleActionClient("timer", TimerAction)
client.wait_for_server()
goal = TimerGoal()
goal.time_to_wait = rospy.Duration.from_sec(5.0)
client.send_goal(goal)
client.wait_for_result()
print("Time elapsed: %f" % (client.get_result().time_elapsed.to_sec()))
chmod +x simple_action_client.py
测试
roscore
rosrun test simple_action_client.py
rosrun test simple_action_client.py
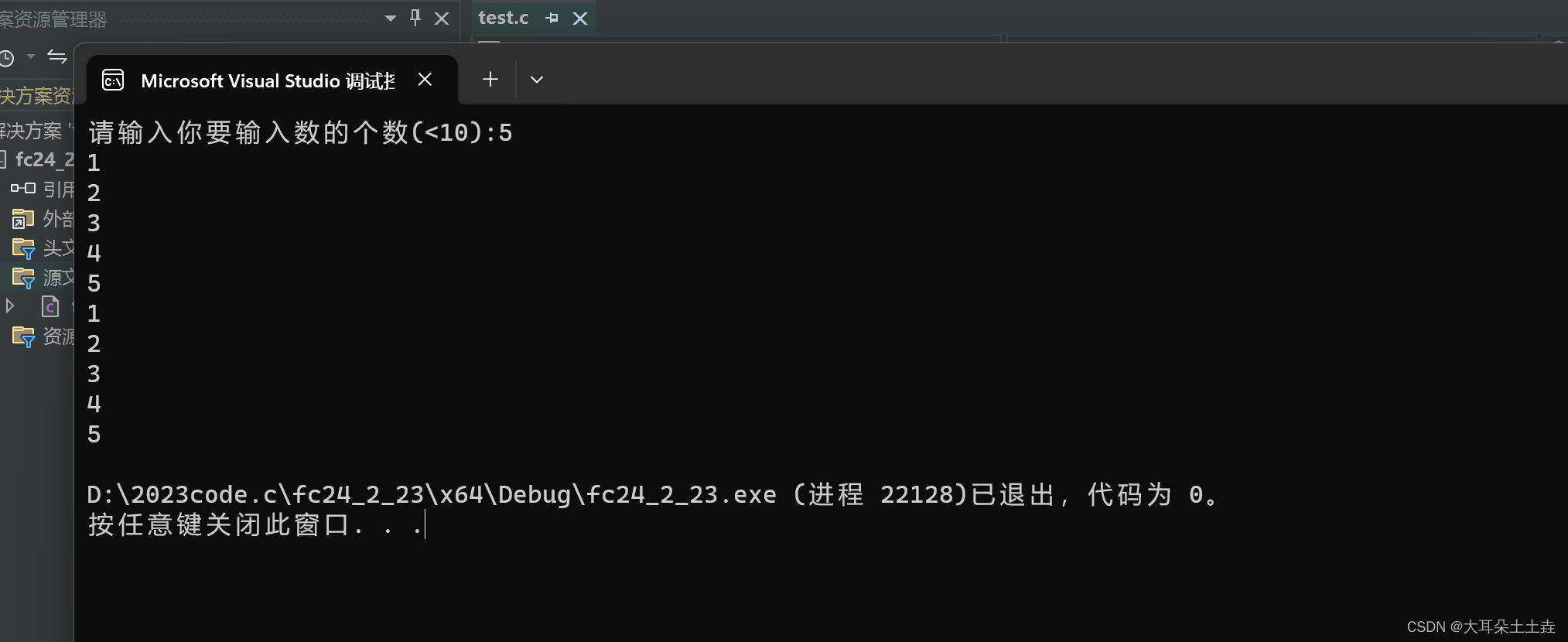
如下结果:

相关文章:
ros自定义action记录
文章目录 自定义action1. 定义action文件2. 修改 package.xml3. 修改 CMakeLists.txt4. 运行 catkin build5. simple_action_server.py6. simple_action_client.py 测试 自定义action ros 版本:kinetic 自定义test包的文件结构如下 |-- test | |-- CMakeLists.t…...

挑战30天学完Python:Day18 正则表达式
📘 Day 18 🎉 本系列为Python基础学习,原稿来源于 30-Days-Of-Python 英文项目,大奇主要是对其本地化翻译、逐条验证和补充,想通过30天完成正儿八经的系统化实践。此系列适合零基础同学,或仅了解Python一点…...
力扣● 343. 整数拆分 ● 96.不同的二叉搜索树
● 343. 整数拆分 想不到,要勇于看题解。 关键在于理解递推公式。 1、DP数组及其下标的含义:dp[i]是分解i这个数得到的最大的乘积。 2、DP数组如何初始化:dp[0]和dp[1]都没意义,所以直接不赋值,初始化dp[2]1即可。…...
游戏同步+游戏中的网络模块
原文链接:游戏开发入门(九)游戏同步技术_游戏数据同步机制流程怎么开发-CSDN博客 游戏开发入门(十)游戏中的网络模块_游戏开发组网-CSDN博客 3.同步技术的基本常识: a.同步给谁?某个用户&…...
【03】逆序数组
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目录 一、逆序函数是什么? 二、逆序函数原码 1.直接逆序 2.创建临时数组逆序 三、结言 💥一、逆序函数是什么? 示例:输入1 4 …...
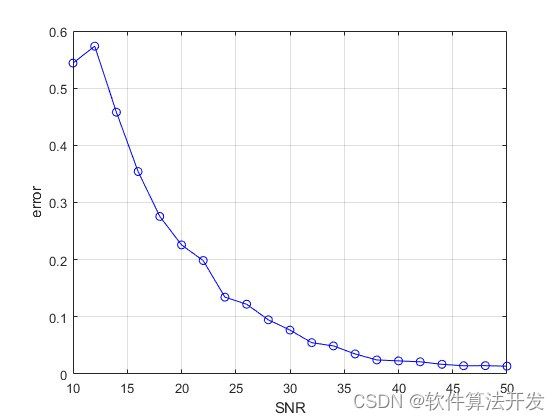
基于Prony算法的系统参数辨识matlab仿真
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 5.完整程序 1.程序功能描述 Prony算法是一种用于信号处理和系统辨识的经典方法,特别适用于线性时不变系统(LTI)的频率响应分析以及模拟复指数信号序列。其…...

创建第一个React项目
React脚手架 npx create-react-app react-demonpx是直接从互联网网上拉最新的脚手架进行创建react 运行React项目 npm start若想找到Webpack配置文件 npm ejectReact的基本使用 基本步骤 导入react和react-dom vue 创建react元素 渲染react元素到页面中导入 import React…...
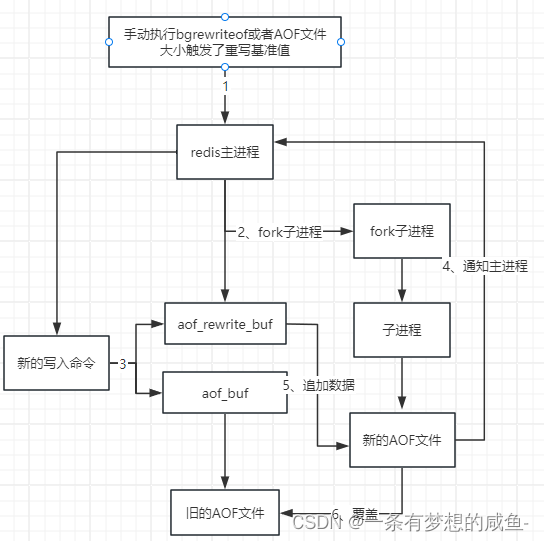
Redis篇之Redis持久化的实现
持久化即把数据保存到可以永久保存的存储设备当中(磁盘)。因为Redis是基于内存存储数据的,一旦redis实例当即数据将会全部丢失,所以需要有某些机制将内存中的数据持久化到磁盘以备发生宕机时能够进行恢复,这一过程就称…...
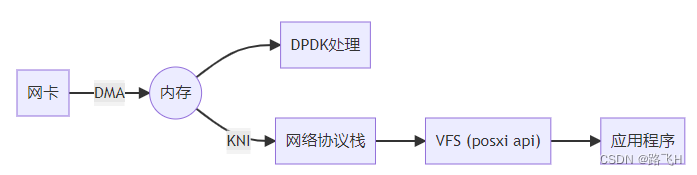
dpdk环境搭建和工作原理
文章目录 1、DPDK环境搭建1.1、环境搭建1.2、编译DPDK 2、DPDK工作原理 1、DPDK环境搭建 1.1、环境搭建 工具准备:VMware、ubuntu16.04。 (1)VMware添加两个网卡。桥接网卡作为 DPDK 运行的网卡,NAT 网卡作为 ssh 连接的网卡。 …...

接口测试实战--自动化测试流程
一、项目前期准备 常见项目软件架构: springMvc:tomcat里运行war包(在webapps目录下) springboot:java -jar xx.jar -xms(**) 运行参数 springCloud:k8s部署,使用kubectl create -f xx.yaml 接口自动化测试介入需越早越好,只要api定义好就可以编写自动化脚本; 某个…...

babylonjs中文文档
经过咨询官方,文档已经添加了开源协议。 基于目前babylonjs没有中文文档,为了打造更好的babylonjs生态圈 ,特和小伙伴们翻译了官方文档。 相关链接: 欢迎加群:464146715 官方文档 中文文档 Babylonjs案例分享...

WordPress使用
WordPress功能菜单 仪表盘 可以查看网站基本信息和内容。 文章 用来管理文章内容,分类以及标签。编辑文章以及设置分类标签,分类和标签可以被添加到 外观-菜单 中。 分类名称自定义;别名为网页url链接中的一部分,最好别设置为中文…...
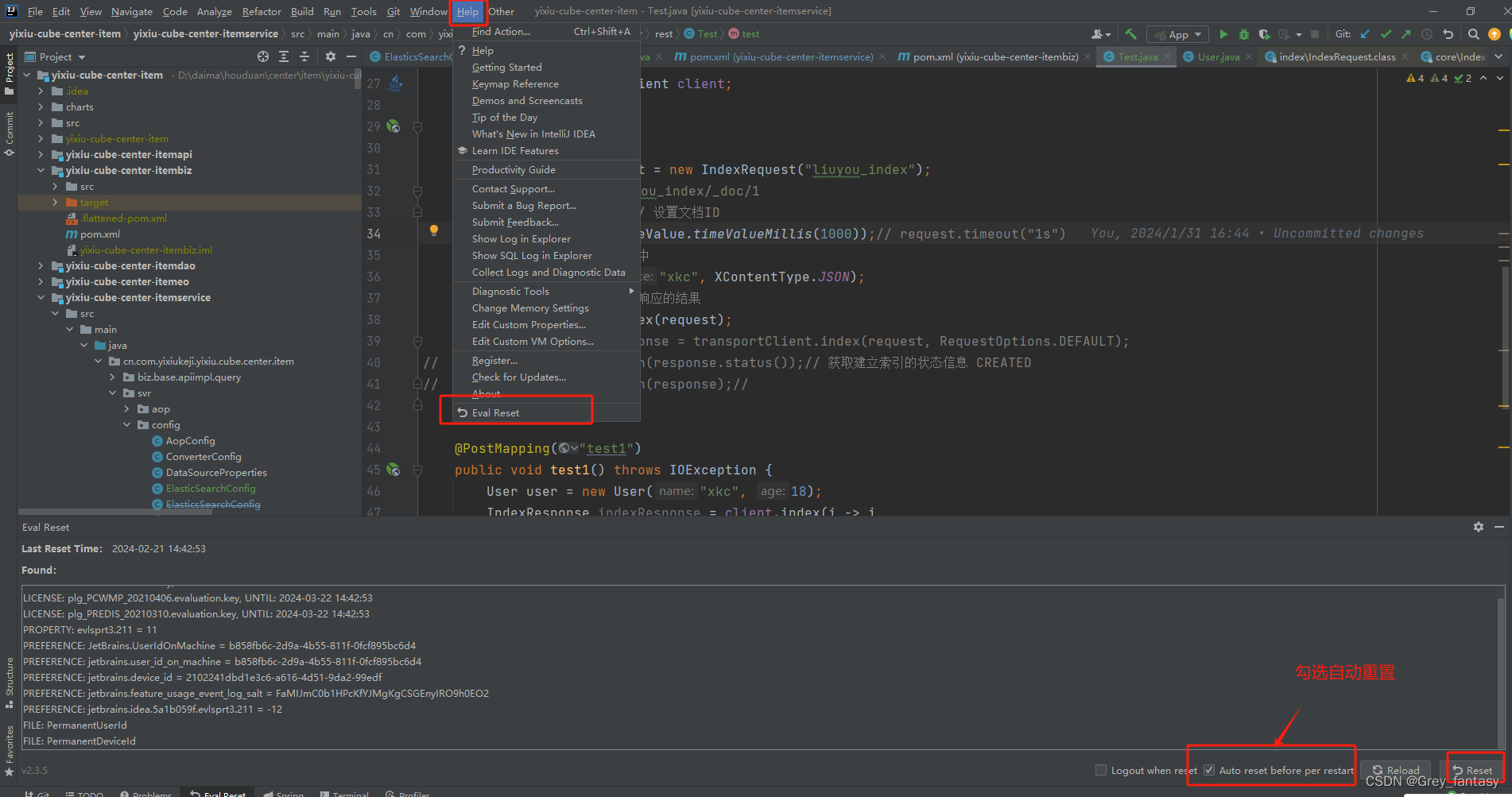
IDEA 2021.3激活
1、打开idea,在设置中查找Settings/Preferences… -> Plugins 内手动添加第三方插件仓库地址:https://plugins.zhile.io搜索:IDE Eval Reset 插件进行安装。应用和使用,如图...

进度条小程序
文章目录 铺垫回车换行缓冲区概述强制冲刷缓冲区 简单实现倒计时功能进度条小程序版本一实例代码效果展示分析 版本二 铺垫 回车换行 回车和换行是两个独立的动作 回车是将光标移动到当前行的最开始(最左侧) 换行是竖直向下平移一行 在C语言中&…...
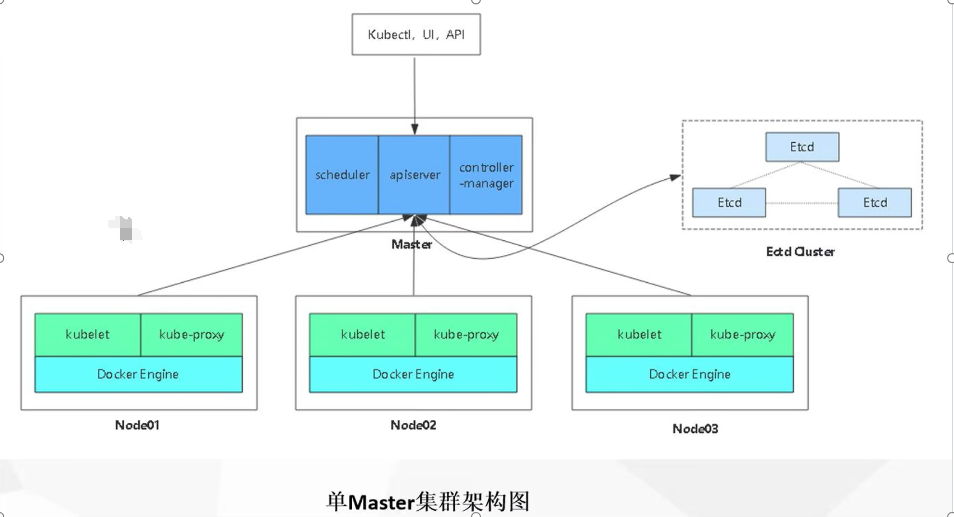
K8S安装部署
常见的K8S安装部署方式 Minikube Minikube是一个工具,可以在本地快速运行一个单节点微型K8S,仅用于学习、预览K8S的一些特性使用。 部署地址:Install Tools | Kubernetes Kubeadm Kubeadm也是一个工具,提供kubeadm init和kube…...

AI大模型与小模型之间的“脱胎”与“反哺”(第一篇)
一、AI小模型脱胎于AI大模型,而AI小模型群又可以反哺AI大模型 AI大模型(如GPT、BERT等)通常拥有大量的参数和训练数据,能够生成或理解复杂的文本内容。这些大模型在训练完成后,可以通过剪枝、微调等方式转化为小模型&…...
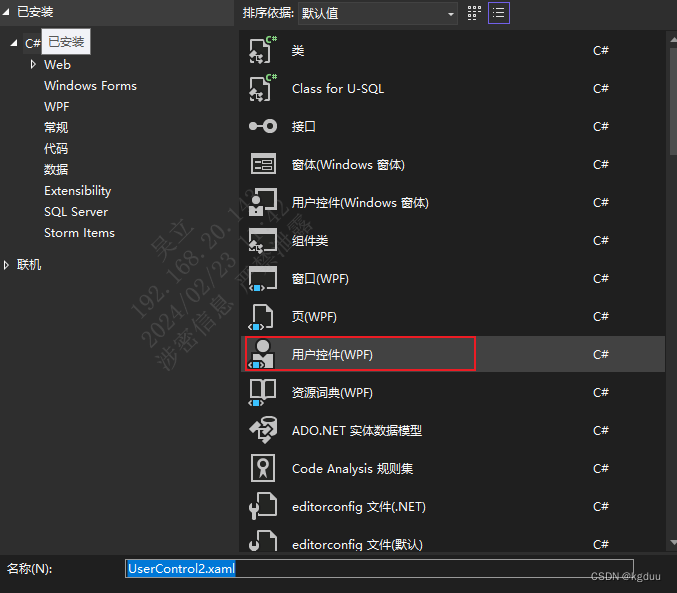
C#学习总结
1、访问权限 方法默认访问修饰符:private 类默认访问修饰符:internal 类的成员默认访问修饰符:private 2、UserControl的使用 首先添加用户控件 使用时一种是通过代码添加,一种是通过拖动组件到xaml中...

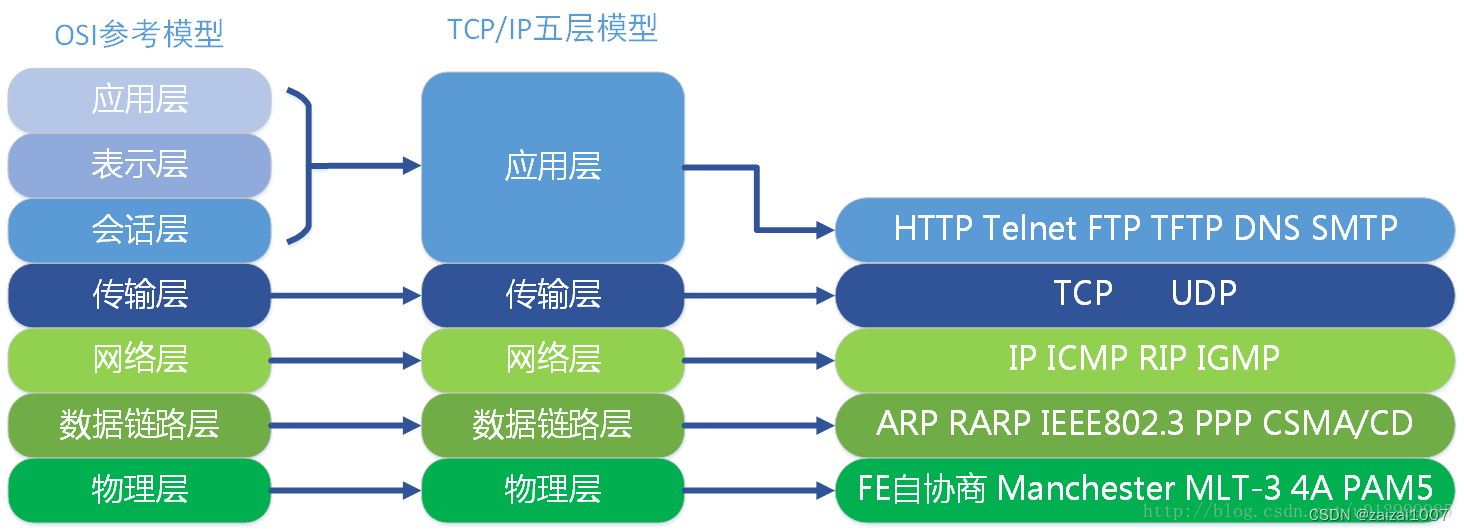
计算机网络-网络互联
文章目录 网络互联网络互联方法LAN-LAN:网桥及其互连原理使用网桥实现LAN-LAN使用交换机扩展局域网使用路由器连接局域网 LAN-WANWAN-WAN路由选择算法非自适应路由选择算法自适应路由选择算法广播路由选择算法:分层路由选择算法 网络互联 网络互联是指利…...

免费的ChatGPT网站( 7个 )
ChatGPT 是由 OpenAI 公司研发的一款大型语言模型,它可以实现智能聊天、文本生成、语言翻译等多种功能。以下是 ChatGPT 的详细介绍: 智能聊天:ChatGPT 可以与用户进行自然语言对话,回答用户的问题,提供相关的信息和建…...

Opencv3.2 ubuntu20.04安装过程
##1、更新源 sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main" sudo apt update##2、安装依赖库 sudo apt-get install build-essential sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavfor…...
)
uniapp 对接腾讯云IM群组成员管理(增删改查)
UniApp 实战:腾讯云IM群组成员管理(增删改查) 一、前言 在社交类App开发中,群组成员管理是核心功能之一。本文将基于UniApp框架,结合腾讯云IM SDK,详细讲解如何实现群组成员的增删改查全流程。 权限校验…...
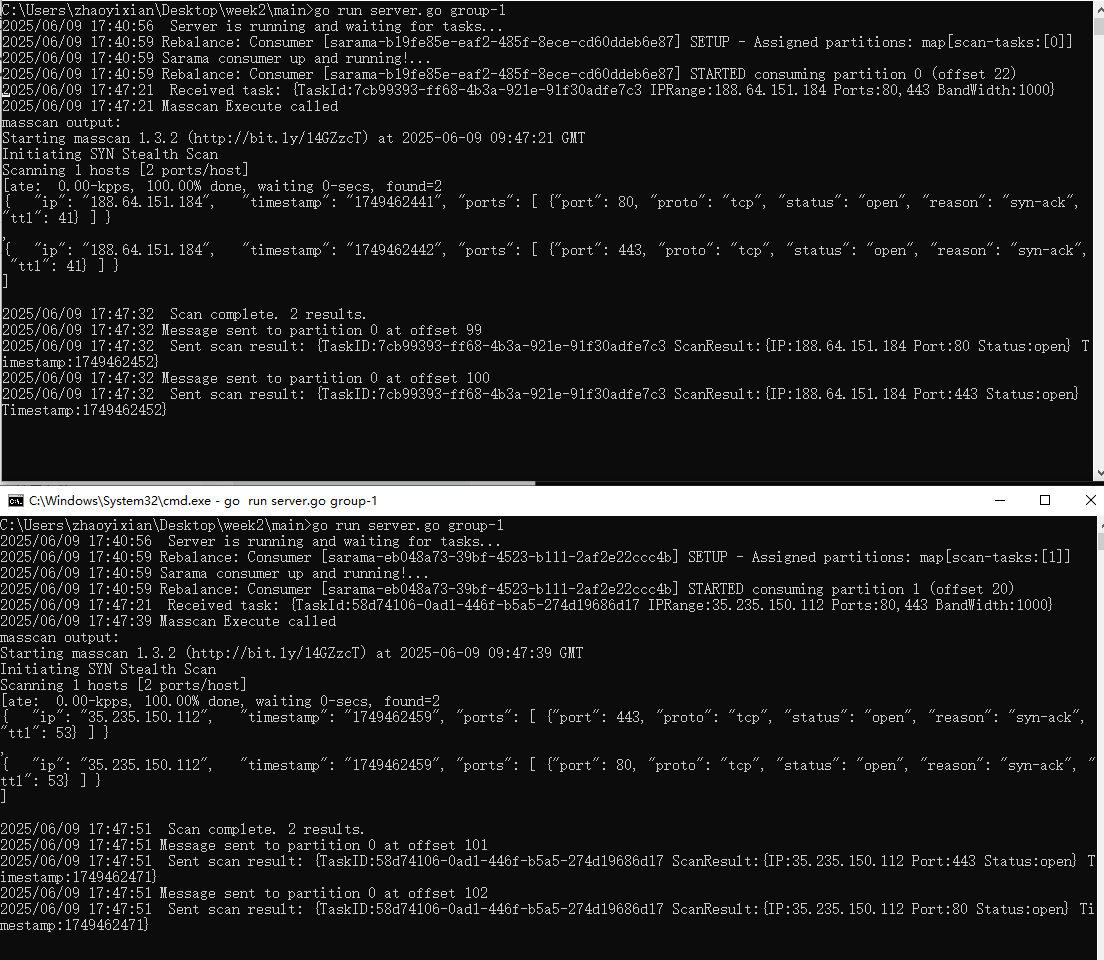
【kafka】Golang实现分布式Masscan任务调度系统
要求: 输出两个程序,一个命令行程序(命令行参数用flag)和一个服务端程序。 命令行程序支持通过命令行参数配置下发IP或IP段、端口、扫描带宽,然后将消息推送到kafka里面。 服务端程序: 从kafka消费者接收…...

Auto-Coder使用GPT-4o完成:在用TabPFN这个模型构建一个预测未来3天涨跌的分类任务
通过akshare库,获取股票数据,并生成TabPFN这个模型 可以识别、处理的格式,写一个完整的预处理示例,并构建一个预测未来 3 天股价涨跌的分类任务 用TabPFN这个模型构建一个预测未来 3 天股价涨跌的分类任务,进行预测并输…...
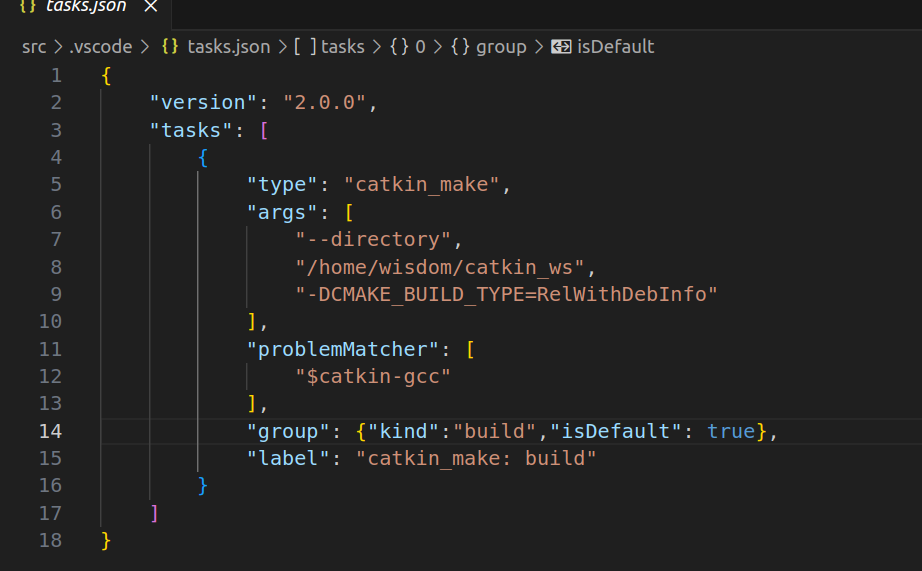
1.3 VSCode安装与环境配置
进入网址Visual Studio Code - Code Editing. Redefined下载.deb文件,然后打开终端,进入下载文件夹,键入命令 sudo dpkg -i code_1.100.3-1748872405_amd64.deb 在终端键入命令code即启动vscode 需要安装插件列表 1.Chinese简化 2.ros …...

OkHttp 中实现断点续传 demo
在 OkHttp 中实现断点续传主要通过以下步骤完成,核心是利用 HTTP 协议的 Range 请求头指定下载范围: 实现原理 Range 请求头:向服务器请求文件的特定字节范围(如 Range: bytes1024-) 本地文件记录:保存已…...
ServerTrust 并非唯一
NSURLAuthenticationMethodServerTrust 只是 authenticationMethod 的冰山一角 要理解 NSURLAuthenticationMethodServerTrust, 首先要明白它只是 authenticationMethod 的选项之一, 并非唯一 1 先厘清概念 点说明authenticationMethodURLAuthenticationChallenge.protectionS…...
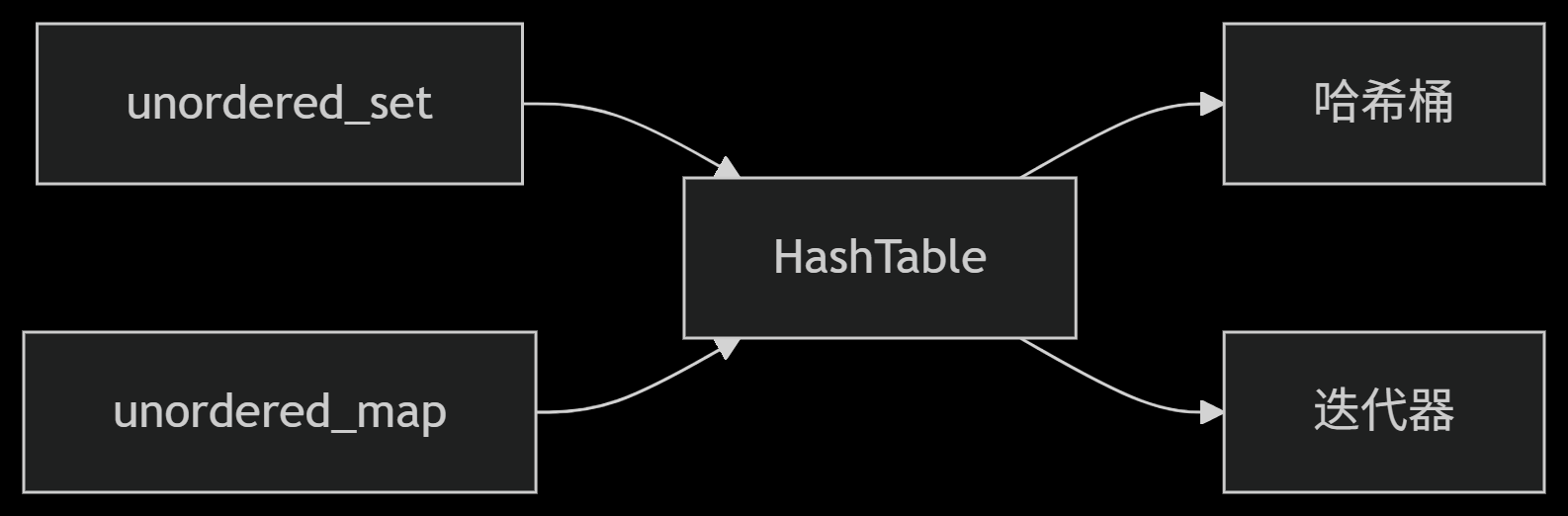
从零实现STL哈希容器:unordered_map/unordered_set封装详解
本篇文章是对C学习的STL哈希容器自主实现部分的学习分享 希望也能为你带来些帮助~ 那咱们废话不多说,直接开始吧! 一、源码结构分析 1. SGISTL30实现剖析 // hash_set核心结构 template <class Value, class HashFcn, ...> class hash_set {ty…...

LLM基础1_语言模型如何处理文本
基于GitHub项目:https://github.com/datawhalechina/llms-from-scratch-cn 工具介绍 tiktoken:OpenAI开发的专业"分词器" torch:Facebook开发的强力计算引擎,相当于超级计算器 理解词嵌入:给词语画"…...

NFT模式:数字资产确权与链游经济系统构建
NFT模式:数字资产确权与链游经济系统构建 ——从技术架构到可持续生态的范式革命 一、确权技术革新:构建可信数字资产基石 1. 区块链底层架构的进化 跨链互操作协议:基于LayerZero协议实现以太坊、Solana等公链资产互通,通过零知…...

【OSG学习笔记】Day 16: 骨骼动画与蒙皮(osgAnimation)
骨骼动画基础 骨骼动画是 3D 计算机图形中常用的技术,它通过以下两个主要组件实现角色动画。 骨骼系统 (Skeleton):由层级结构的骨头组成,类似于人体骨骼蒙皮 (Mesh Skinning):将模型网格顶点绑定到骨骼上,使骨骼移动…...