【数据结构与算法】动态规划法解题20240227

动态规划法
- 一、什么是动态规划
- 二、动态规划的解题步骤
- 三、509. 斐波那契数
- 1、动规五部曲:
- 四、70. 爬楼梯
- 1、动规五部曲:
- 五、746. 使用最小花费爬楼梯
- 1、动规五部曲:
一、什么是动态规划
动态规划,英文:Dynamic Programming,简称DP,如果某一问题有很多重叠子问题,使用动态规划是最有效的。
所以动态规划中每一个状态一定是由上一个状态推导出来的
二、动态规划的解题步骤
对于动态规划问题,我将拆解为如下五步曲,这五步都搞清楚了,才能说把动态规划真的掌握了!
确定dp数组(dp table)以及下标的含义
确定递推公式
dp数组如何初始化
确定遍历顺序
举例推导dp数组
三、509. 斐波那契数
1、动规五部曲:
这里我们要用一个一维dp数组来保存递归的结果
1、确定dp数组以及下标的含义
dp[i]的定义为:第i个数的斐波那契数值是dp[i]
2、确定递推公式
为什么这是一道非常简单的入门题目呢?
因为题目已经把递推公式直接给我们了:状态转移方程 dp[i] = dp[i - 1] + dp[i - 2];
3、dp数组如何初始化
题目中把如何初始化也直接给我们了,如下:
dp[0] = 0;
dp[1] = 1;
4、确定遍历顺序
从递归公式dp[i] = dp[i - 1] + dp[i - 2];中可以看出,dp[i]是依赖 dp[i - 1] 和 dp[i - 2],那么遍历的顺序一定是从前到后遍历的
class S509:def func(self, n):# 1、创建dp数组,dp[i]:表示第i个数是第i个斐波那契数列dp = [0] * (n+1)# 3、初始化数组状态dp[0] = 0dp[1] = 1# 4、确定遍历顺序for i in range(2, n+1):# 2、确定递推公式dp[i] = dp[i - 1] + dp[i - 2]print(dp)return dp[n]r = S509()
n = 4
print(r.func(n))四、70. 爬楼梯
简单
假设你正在爬楼梯。需要 n 阶你才能到达楼顶。
每次你可以爬 1 或 2 个台阶。你有多少种不同的方法可以爬到楼顶呢?
1、动规五部曲:
1、确定dp数组以及下标的含义
dp[i]: 爬到第i层楼梯,有dp[i]种方法
2、确定递推公式
如何可以推出dp[i]呢?
从dp[i]的定义可以看出,dp[i] 可以有两个方向推出来。
首先是dp[i - 1],上i-1层楼梯,有dp[i - 1]种方法,那么再一步跳一个台阶不就是dp[i]了么。
还有就是dp[i - 2],上i-2层楼梯,有dp[i - 2]种方法,那么再一步跳两个台阶不就是dp[i]了么。
那么dp[i]就是 dp[i - 1]与dp[i - 2]之和!
所以dp[i] = dp[i - 1] + dp[i - 2] 。
在推导dp[i]的时候,一定要时刻想着dp[i]的定义,否则容易跑偏。
这体现出确定dp数组以及下标的含义的重要性!
3、dp数组如何初始化
不考虑dp[0]如何初始化,只初始化dp[1] = 1,dp[2] = 2,然后从i = 3开始递推,这样才符合dp[i]的定义。
4、确定遍历顺序
从递推公式dp[i] = dp[i - 1] + dp[i - 2];中可以看出,遍历顺序一定是从前向后遍历的
class S70:def func(self, n):if n <= 1:return n# 1、创建dp数组,dp[i]:走到i台阶,一共用dp[i]种方法dp = [0] * (n + 1)# 3、数组初始化dp[1] = 1dp[2] = 2# 4、确定遍历顺序for i in range(3, n + 1):# 2、确定递推公式dp[i] = dp[i - 1] + dp[i - 2]print(dp)return dp[n]r = S70()
n = 4
print(r.func(n))五、746. 使用最小花费爬楼梯
简单
给你一个整数数组 cost ,其中 cost[i] 是从楼梯第 i 个台阶向上爬需要支付的费用。一旦你支付此费用,即可选择向上爬一个或者两个台阶。
你可以选择从下标为 0 或下标为 1 的台阶开始爬楼梯。
请你计算并返回达到楼梯顶部的最低花费。
1、动规五部曲:
1、确定dp数组以及下标的含义
使用动态规划,就要有一个数组来记录状态,本题只需要一个一维数组dp[i]就可以了。
dp[i]的定义:到达第i台阶所花费的最少体力为dp[i]。
2、确定递推公式
可以有两个途径得到dp[i],一个是dp[i-1] 一个是dp[i-2]。
dp[i - 1] 跳到 dp[i] 需要花费 dp[i - 1] + cost[i - 1]。
dp[i - 2] 跳到 dp[i] 需要花费 dp[i - 2] + cost[i - 2]。
那么究竟是选从dp[i - 1]跳还是从dp[i - 2]跳呢?
一定是选最小的,所以dp[i] = min(dp[i - 1] + cost[i - 1], dp[i - 2] + cost[i - 2]);
3、dp数组如何初始化
看一下递归公式,dp[i]由dp[i - 1],dp[i - 2]推出,既然初始化所有的dp[i]是不可能的,那么只初始化dp[0]和dp[1]就够了,其他的最终都是dp[0]dp[1]推出。
新题目描述中明确说了 “你可以选择从下标为 0 或下标为 1 的台阶开始爬楼梯。” 也就是说 到达 第 0 个台阶是不花费的,但从 第0 个台阶 往上跳的话,需要花费 cost[0]。
所以初始化 dp[0] = 0,dp[1] = 0;
4、确定遍历顺序
最后一步,递归公式有了,初始化有了,如何遍历呢?
因为是模拟台阶,而且dp[i]由dp[i-1]dp[i-2]推出,所以是从前到后遍历cost数组就可以了。
class S746:def func(self, cost):# 1、创建dp数组,dp[i]:走到楼梯i,需要最小的花费为dp[i]dp = [0] * (len(cost) + 1)# 3、初始化数组dp[0] = 0 # 你可以选择从下标为 0 或下标为 1 的台阶开始爬楼梯。dp[1] = 0 # 你可以选择从下标为 0 或下标为 1 的台阶开始爬楼梯。# 4、确定遍历顺序for i in range(2, len(cost) + 1):# 2、递推公式# 在第i步,可以选择从前一步(i-1)花费体力到达当前步,或者从前两步(i-2)花费体力到达当前步# 选择其中花费体力较小的路径,加上当前步的花费,更新dp数组dp[i] = min(dp[i - 1] + cost[i - 1], dp[i - 2] + cost[i - 2])return dp[len(cost)]r = S746()
cost = [1, 100, 1, 1, 1, 100, 1, 1, 100, 1]
print(r.func(cost))

相关文章:
【数据结构与算法】动态规划法解题20240227
动态规划法 一、什么是动态规划二、动态规划的解题步骤三、509. 斐波那契数1、动规五部曲: 四、70. 爬楼梯1、动规五部曲: 五、746. 使用最小花费爬楼梯1、动规五部曲: 一、什么是动态规划 动态规划,英文:Dynamic Pro…...

备战蓝桥杯—— 双指针技巧巧答链表2
对于单链表相关的问题,双指针技巧是一种非常广泛且有效的解决方法。以下是一些常见问题以及使用双指针技巧解决: 合并两个有序链表: 使用两个指针分别指向两个链表的头部,逐一比较节点的值,将较小的节点链接到结果链表…...

半监督节点分类-graph learning
半监督节点分类相当于在一个图当中,用一部分节点的类别上已知的,有另外一部分节点的类别是未知的,目标是使用有标签的节点来推断没有标签的节点 注意 半监督节点分类属于直推式学习,直推式学习相当于出现新节点后,需要…...
软件文档-运维-开发-管理-资质-评审-招投标-验收
开发文档:这类文档主要用于记录软件的开发过程和细节,包括: 《功能要求》:描述了软件应具备的功能,是软件开发的基础。《投标方案》:向潜在的客户或招标方展示公司的技术和项目实施能力。《需求分析》&…...

猫头虎分享已解决Bug || Vue中的TypeError: Cannot read property ‘name‘ of undefined 错误
博主猫头虎的技术世界 🌟 欢迎来到猫头虎的博客 — 探索技术的无限可能! 专栏链接: 🔗 精选专栏: 《面试题大全》 — 面试准备的宝典!《IDEA开发秘籍》 — 提升你的IDEA技能!《100天精通鸿蒙》 …...

技术应用:使用Spring Boot、MyBatis Plus和Dynamic DataSource实现多数据源
引言 在现代的软件开发中,许多应用程序需要同时访问多个数据库。例如,一个电子商务平台可能需要访问多个数据库来存储用户信息、产品信息和订单信息等。在这种情况下,使用多数据源是一种常见的解决方案,它允许我们在一个应用程序…...
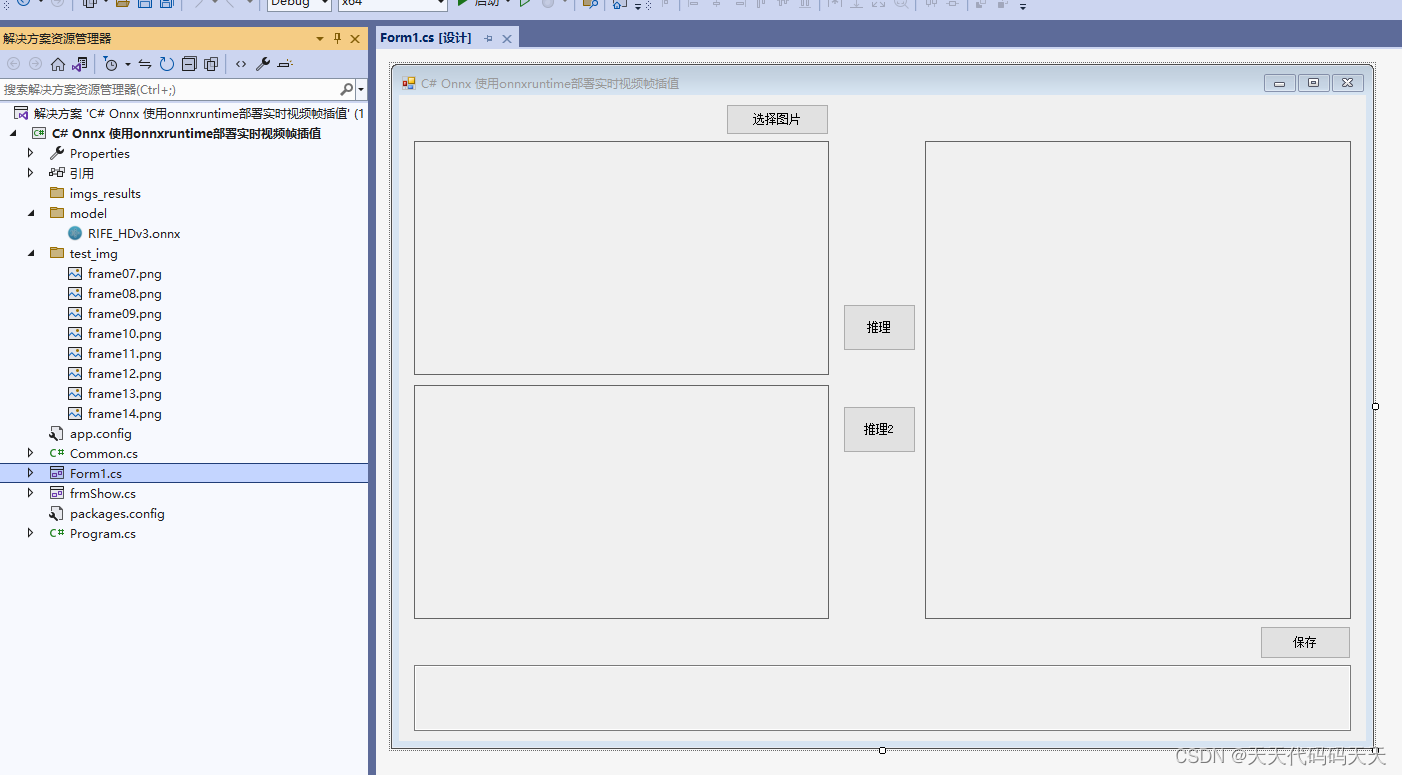
C# Onnx 使用onnxruntime部署实时视频帧插值
目录 介绍 效果 模型信息 项目 代码 下载 C# Onnx 使用onnxruntime部署实时视频帧插值 介绍 github地址:https://github.com/google-research/frame-interpolation FILM: Frame Interpolation for Large Motion, In ECCV 2022. The official Tensorflow 2…...

编程笔记 Golang基础 016 数据类型:数字类型
编程笔记 Golang基础 016 数据类型:数字类型 1. 整数类型(Integer Types)a) 固定长度整数:b) 变长整数: 2. 浮点数类型(Floating-Point Types)3. 复数类型(Complex Number Types&…...
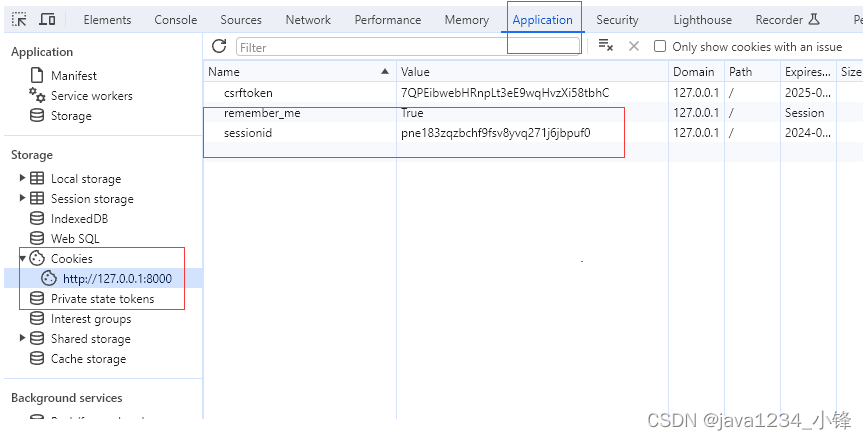
一周学会Django5 Python Web开发-会话管理(CookiesSession)
锋哥原创的Python Web开发 Django5视频教程: 2024版 Django5 Python web开发 视频教程(无废话版) 玩命更新中~_哔哩哔哩_bilibili2024版 Django5 Python web开发 视频教程(无废话版) 玩命更新中~共计26条视频,包括:2024版 Django5 Python we…...

QT之QString.arg输出固定位数
问题描述 我需要用QString输出一个固定位数的数字字符串。起初我的代码是这样: int img_num 1 auto new_name QString("%1.png").arg((int)img_num, 3, 10, 0); //最后一个参数用u0也是一样的 qDebug() << "new_name:" << new…...

Linux下各种压缩包的压缩与解压
tar 归档,不压缩,常见后缀 .tar # 将文件夹归档成为一个包 tar cf rootfs.tar rootfs # 将归档包还原为文件夹 tar xf rootfs.tar # 将归档包还原到路径 a/b/c tar xf rootfs.tar -C a/b/cgzip压缩, 常见后缀 .tar.gz .tgz # 压缩 tar czf …...
【ctfshow—web】——信息搜集篇1(web1~20详解)
ctfshow—web题解 web1web2web3web4web5web6web7web8web9web10web11web12web13web14web15web16web17web18web19web20 web1 题目提示 开发注释未及时删除 那就找开发注释咯,可以用F12来查看,也可以CtrlU直接查看源代码呢 就拿到flag了 web2 题目提示 j…...
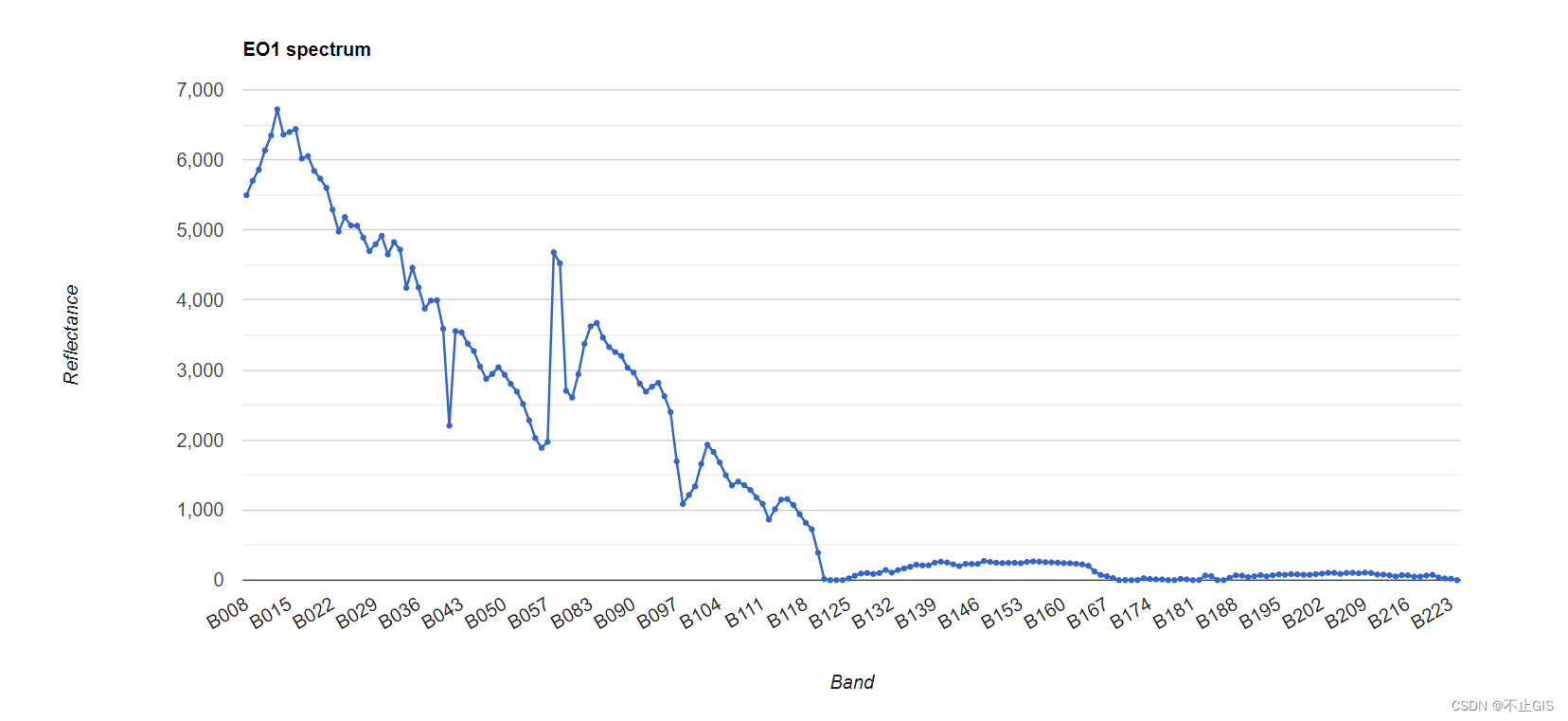
GEE入门篇|遥感专业术语(实践操作4):光谱分辨率(Spectral Resolution)
目录 光谱分辨率(Spectral Resolution) 1.MODIS 2.EO-1 光谱分辨率(Spectral Resolution) 光谱分辨率是指传感器进行测量的光谱带的数量和宽度。 您可以将光谱带的宽度视为每个波段的波长间隔,在多个波段测量辐射亮…...

c++中模板的注意事项
1. 模板定义时,<>中的虚拟类型参数不能为空。(因为我们使用模板就是希望使用模拟类型代替其它的类型,如果我们不定义就没有意义了) 2. 无论是定义函数模板还是类模板,其实template定义与后面使用虚拟类型的类或者函数,是…...
【代码随想录python笔记整理】第十三课 · 链表的基础操作 1
前言:本笔记仅仅只是对内容的整理和自行消化,并不是完整内容,如有侵权,联系立删。 一、链表 在之前的学习中,我们接触到了字符串和数组(列表)这两种结构,它们具有着以下的共同点:1、元素按照一定的顺序来排列。2、可以通过索引来访问数组中的元素和字符串中的字符。由此,…...
JAVA工程师面试专题-《Mysql》篇
目录 一、基础 1、mysql可以使用多少列创建索引? 2、mysql常用的存储引擎有哪些 3、MySQL 存储引擎,两者区别 4、mysql默认的隔离级别 5、数据库三范式 6、drop、delete 与 truncate 区别? 7、IN与EXISTS的区别 二、索引 1、索引及索…...
|Day22(二叉树))
@ 代码随想录算法训练营第4周(C语言)|Day22(二叉树)
代码随想录算法训练营第4周(C语言)|Day22(二叉树) Day22、二叉树(包含题目 ● 235. 二叉搜索树的最近公共祖先 ● 701.二叉搜索树中的插入操作 ● 450.删除二叉搜索树中的节点 ) 235. 二叉搜索树的最近公…...
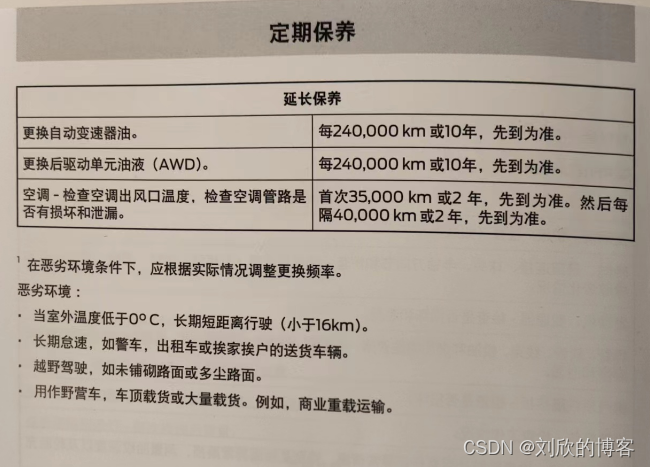
福特锐界2021plus 汽车保养手册
福特锐界2021plus汽车保养手册两页,零部件保养要求,电子版放这里方便查询:...

c++进阶路线
学完C后的进阶路线-初学者勿入【程序员Rock】_哔哩哔哩_bilibili 1.系统训练代码阅读能力 代码阅读工具: 1).Source Insight(阅读大型源码) 2).understand(整体代码模块关系构建) 3).SOURCETRAIL 代码阅读能力--千行级 嵌入…...
python中的类与对象(2)
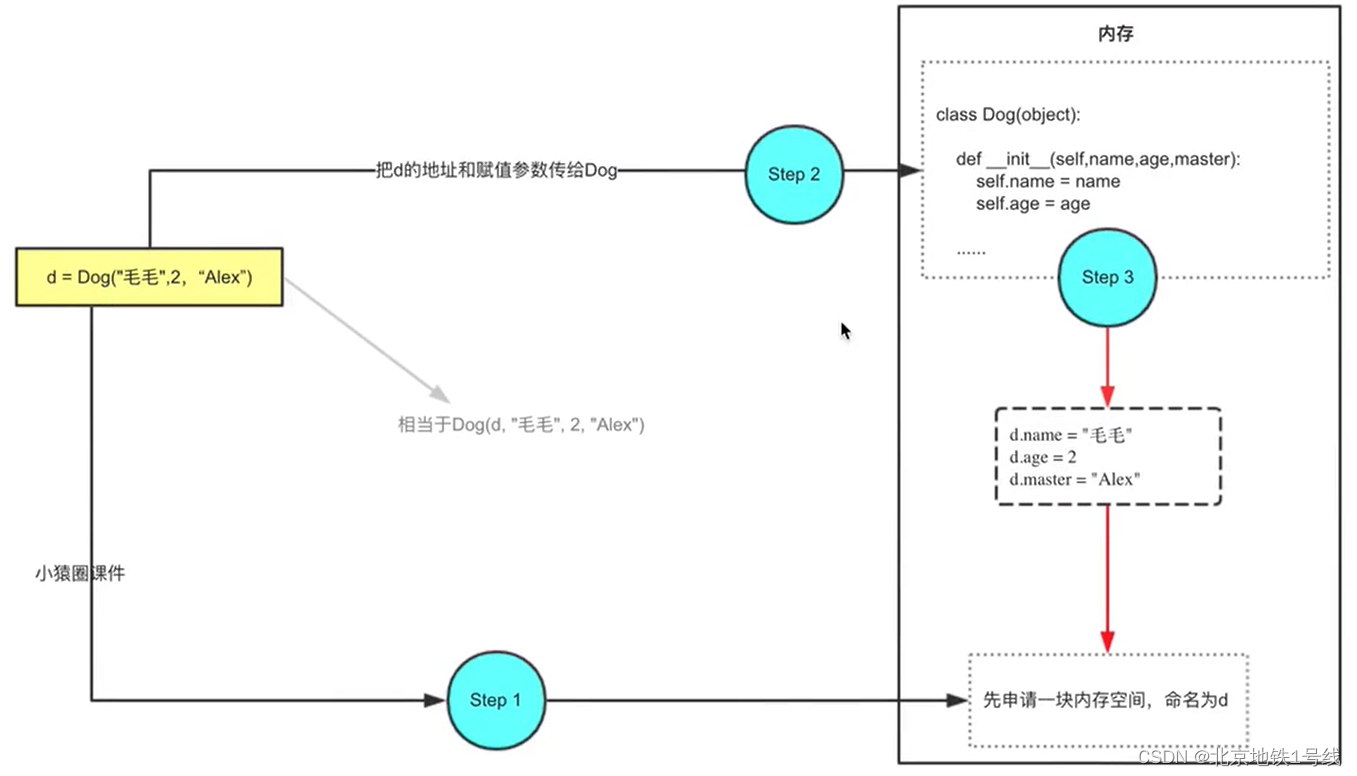
目录 一. 类的基本语法 二. 类属性的应用场景 三. 类与类之间的依赖关系 (1)依赖关系 (2)关联关系 (3)组合关系 四. 类的继承 一. 类的基本语法 先看一段最简单的代码: class Dog():d_…...

【OSG学习笔记】Day 18: 碰撞检测与物理交互
物理引擎(Physics Engine) 物理引擎 是一种通过计算机模拟物理规律(如力学、碰撞、重力、流体动力学等)的软件工具或库。 它的核心目标是在虚拟环境中逼真地模拟物体的运动和交互,广泛应用于 游戏开发、动画制作、虚…...
Cesium相机控制)
三维GIS开发cesium智慧地铁教程(5)Cesium相机控制
一、环境搭建 <script src"../cesium1.99/Build/Cesium/Cesium.js"></script> <link rel"stylesheet" href"../cesium1.99/Build/Cesium/Widgets/widgets.css"> 关键配置点: 路径验证:确保相对路径.…...

汽车生产虚拟实训中的技能提升与生产优化
在制造业蓬勃发展的大背景下,虚拟教学实训宛如一颗璀璨的新星,正发挥着不可或缺且日益凸显的关键作用,源源不断地为企业的稳健前行与创新发展注入磅礴强大的动力。就以汽车制造企业这一极具代表性的行业主体为例,汽车生产线上各类…...

质量体系的重要
质量体系是为确保产品、服务或过程质量满足规定要求,由相互关联的要素构成的有机整体。其核心内容可归纳为以下五个方面: 🏛️ 一、组织架构与职责 质量体系明确组织内各部门、岗位的职责与权限,形成层级清晰的管理网络…...
:滤镜命令)
ffmpeg(四):滤镜命令
FFmpeg 的滤镜命令是用于音视频处理中的强大工具,可以完成剪裁、缩放、加水印、调色、合成、旋转、模糊、叠加字幕等复杂的操作。其核心语法格式一般如下: ffmpeg -i input.mp4 -vf "滤镜参数" output.mp4或者带音频滤镜: ffmpeg…...
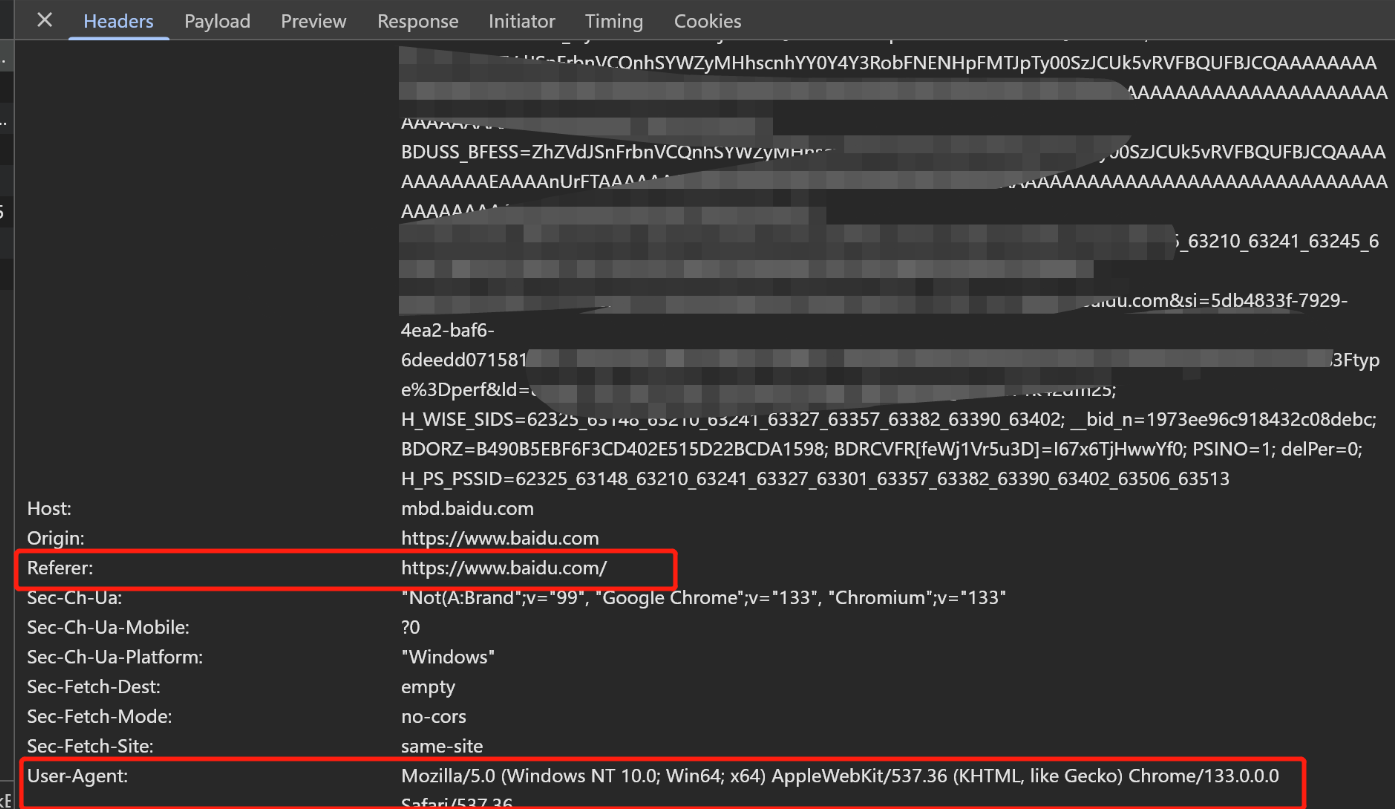
Python爬虫(一):爬虫伪装
一、网站防爬机制概述 在当今互联网环境中,具有一定规模或盈利性质的网站几乎都实施了各种防爬措施。这些措施主要分为两大类: 身份验证机制:直接将未经授权的爬虫阻挡在外反爬技术体系:通过各种技术手段增加爬虫获取数据的难度…...

工业自动化时代的精准装配革新:迁移科技3D视觉系统如何重塑机器人定位装配
AI3D视觉的工业赋能者 迁移科技成立于2017年,作为行业领先的3D工业相机及视觉系统供应商,累计完成数亿元融资。其核心技术覆盖硬件设计、算法优化及软件集成,通过稳定、易用、高回报的AI3D视觉系统,为汽车、新能源、金属制造等行…...

(转)什么是DockerCompose?它有什么作用?
一、什么是DockerCompose? DockerCompose可以基于Compose文件帮我们快速的部署分布式应用,而无需手动一个个创建和运行容器。 Compose文件是一个文本文件,通过指令定义集群中的每个容器如何运行。 DockerCompose就是把DockerFile转换成指令去运行。 …...
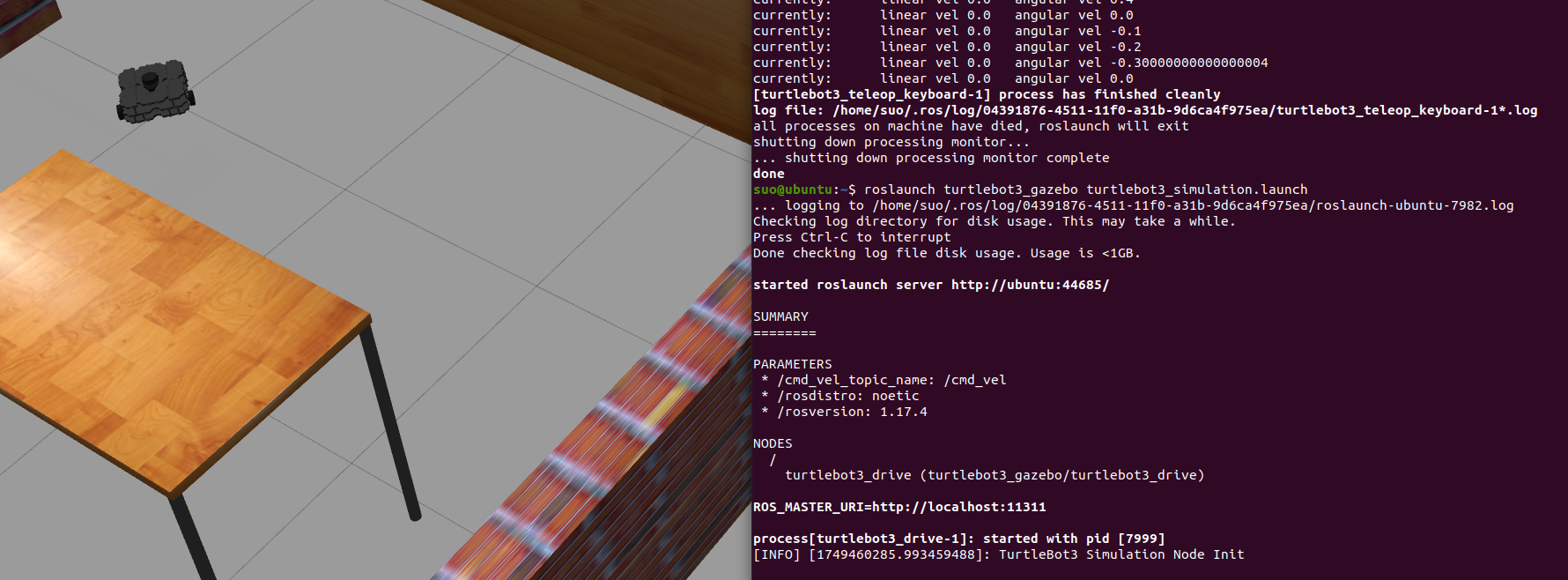
基于TurtleBot3在Gazebo地图实现机器人远程控制
1. TurtleBot3环境配置 # 下载TurtleBot3核心包 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git git clone -b noetic https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone -b noetic-dev…...
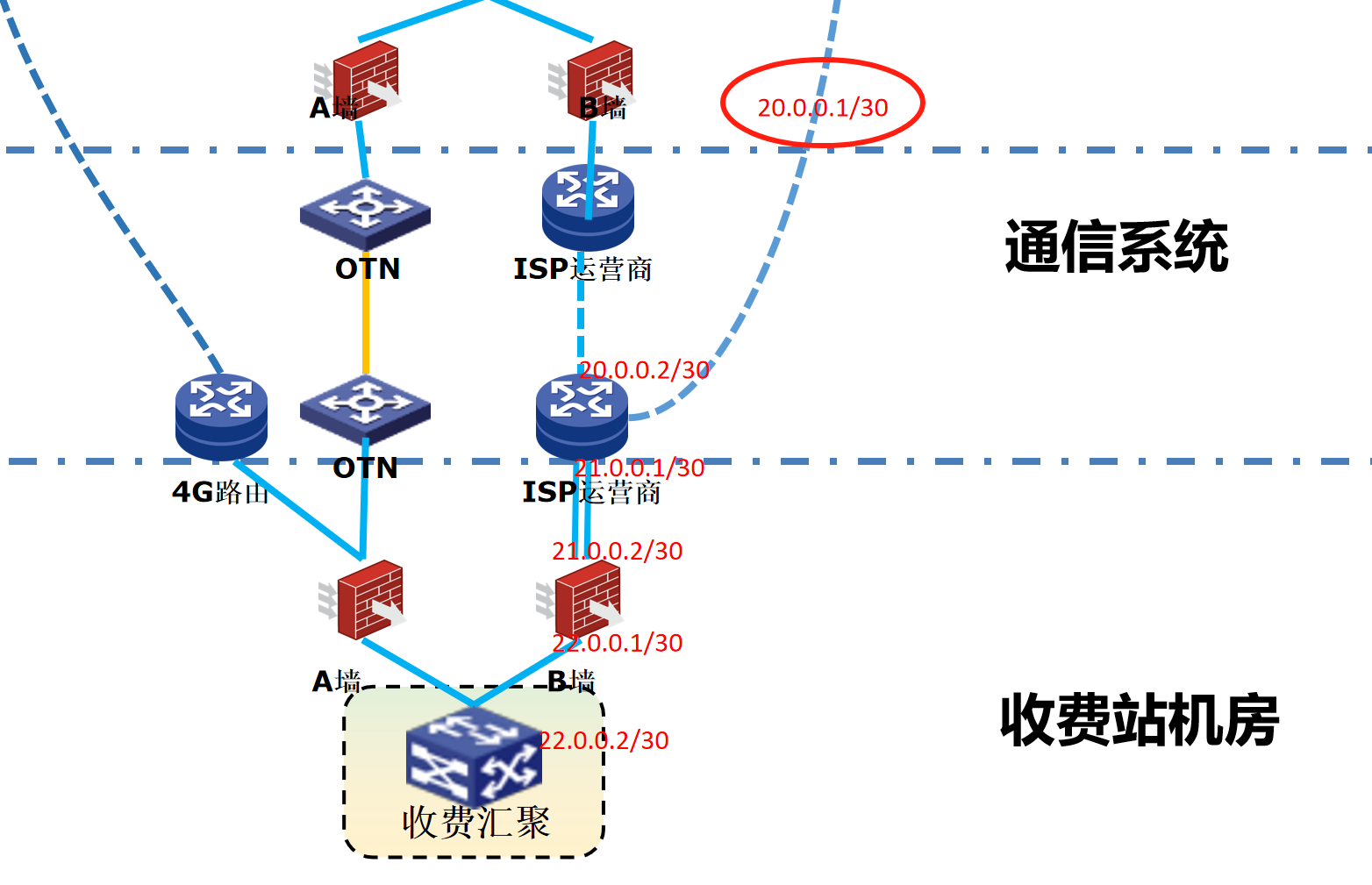
浪潮交换机配置track检测实现高速公路收费网络主备切换NQA
浪潮交换机track配置 项目背景高速网络拓扑网络情况分析通信线路收费网络路由 收费汇聚交换机相应配置收费汇聚track配置 项目背景 在实施省内一条高速公路时遇到的需求,本次涉及的主要是收费汇聚交换机的配置,浪潮网络设备在高速项目很少,通…...