【PSINS工具箱】EKF与UKF滤波
描述
对工具箱SINS/GPS,153例程的修改,将EKF和UKF放在一个文件里面,一次运行可以得到两个滤波的结果。
片段
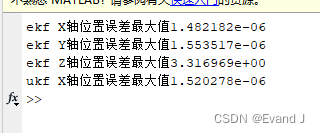
运行截图


程序完整源代码
在有工具箱的情况下,直接运行此代码,即可得到结果
% 基于PSINS工具箱的IMU数据生成与滤波
% date:2024-2-15
% Evand(evandworld@qq.com)
% Ver1
clear;clc;close all;
glvs
psinstypedef(153);
ts = 0.1; % sampling interval
%% 轨迹设置
avp0 = [[0;0;0]; [0;0;0]; [0;0;0]]; % init avp
% trajectory segment setting
traj_ = [];
seg = trjsegment(traj_, 'init', 0);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'accelerate', 10, traj_, 1);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 45, 2, traj_, 4);
seg = trjsegment(seg, 'climb', 10, 2, traj_, 50);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'descent', 10, 2, traj_, 50);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 45, 2, traj_, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'deaccelerate', 5, traj_, 2); %2
seg = trjsegment(seg, 'uniform', 100);
% generate, save & plot
trj = trjsimu(avp0, seg.wat, ts, 1);
% trjfile('trj10ms.mat', trj);
%% 初始化
% initial settings
[nn, ts, nts] = nnts(2, trj.ts);
imuerr = imuerrset(0.03, 100, 0.001, 5);
imu = imuadderr(trj.imu, imuerr);
davp0 = avperrset([0.5;-0.5;20], 0.1, [1;1;3]);
ins = insinit(avpadderr(trj.avp0,davp0), ts);
% KF filter
rk = poserrset([1;1;3]);
kf = kfinit(ins, davp0, imuerr, rk);
kf.Pmin = [avperrset(0.01,1e-4,0.1); gabias(1e-3, [1,10])].^2; kf.pconstrain=1;
len = length(imu); [avp_ekf, xkpk] = prealloc(fix(len/nn), 10, 2*kf.n+1);
timebar(nn, len, 'KF');
ki = 1;
for k=1:nn:len-nn+1k1 = k+nn-1; wvm = imu(k:k1,1:6); t = imu(k1,end);ins = insupdate(ins, wvm);kf.Phikk_1 = kffk(ins);kf = kfupdate(kf);if mod(t,1)==0posGPS = trj.avp(k1,7:9)' + davp0(7:9).*randn(3,1); % GPS pos simulation with some white noisekf = kfupdate(kf, ins.pos-posGPS, 'M');[kf, ins] = kffeedback(kf, ins, 1, 'avp');avp_ekf(ki,:) = [ins.avp', t];xkpk(ki,:) = [kf.xk; diag(kf.Pxk); t]'; ki = ki+1;endtimebar;
end
avp_ekf(ki:end,:) = []; xkpk(ki:end,:) = [];
%% EKF show results
insplot(avp_ekf);
avperr = avpcmpplot(trj.avp, avp_ekf);
kfplot(xkpk, avperr, imuerr);%% UKF filter
glvs
% psinstypedef('test_SINS_GPS_UKF_153_def');
[nn, ts, nts] = nnts(2, trj.ts);
imuerr = imuerrset(0.03, 100, 0.001, 5);
imu = imuadderr(trj.imu, imuerr);
davp0 = avperrset([0.5;-0.5;20], 0.1, [1;1;3]);
ins = insinit(avpadderr(trj.avp0,davp0), ts);rk = poserrset([1;1;3]);
kf = kfinit(ins, davp0, imuerr, rk);
kf.fx = @largephiu15ukf;
len = length(imu); [avp_ukf, xkpk] = prealloc(fix(len/nn), 10, 2*kf.n+1);
timebar(nn, len, '15-state SINS/GPS UKF仿真,时间较长');
ki = 1;
for k=1:nn:len-nn+1k1 = k+nn-1; wvm = imu(k:k1,1:6); t = imu(k1,end);ins = insupdate(ins, wvm);kf.px = ins;kf = ukf(kf);if mod(t,1)==0posGPS = trj.avp(k1,7:9)' + davp0(7:9).*randn(3,1); % GPS pos simulation with some white noisekf = ukf(kf, ins.pos-posGPS, 'M'); % UKF filter[kf, ins] = kffeedback(kf, ins, 1, 'avp');avp_ukf(ki,:) = [ins.avp', t];xkpk(ki,:) = [kf.xk; diag(kf.Pxk); t]'; ki = ki+1;endtimebar;
end
avp_ukf(ki:end,:) = []; xkpk(ki:end,:) = []; %% results
insplot(trj.avp);
imuplot(trj.imu);
figure;
plot3(trj.avp(:,7),trj.avp(:,8),trj.avp(:,9));
hold on
plot3(trj.avp(1,7),trj.avp(1,8),trj.avp(1,9),'*');
plot3(avp_ekf(:,7),avp_ekf(:,8),avp_ekf(:,9));
plot3(avp_ukf(:,7),avp_ukf(:,8),avp_ukf(:,9));
title('原创——3D轨迹图');
legend('真实值','起点','EKF滤波值','UKF滤波值');
% 误差绘图
% 误差曲线图与累积分布函数图,两种情况、三轴
figure;
subplot(3,2,1);
plot(1:10:len,avp_ekf(:,7)-trj.avp(1:10:len,7),1:10:len,avp_ukf(:,7)-trj.avp(1:10:len,7));
title('原创——X轴位置误差对比');legend('EKF滤波值','UKF滤波值');
subplot(3,2,3);
plot(1:10:len,avp_ekf(:,8)-trj.avp(1:10:len,8),1:10:len,avp_ukf(:,8)-trj.avp(1:10:len,8));
subplot(3,2,5);
plot(1:10:len,avp_ekf(:,9)-trj.avp(1:10:len,9),1:10:len,avp_ukf(:,9)-trj.avp(1:10:len,9));
subplot(3,2,2);
cdfplot(abs(avp_ekf(:,7)-trj.avp(1:10:len,7)));
hold on
cdfplot(abs(avp_ukf(:,7)-trj.avp(1:10:len,7)));
subplot(3,2,4);
cdfplot(abs(avp_ekf(:,8)-trj.avp(1:10:len,8)));
hold on
cdfplot(abs(avp_ukf(:,8)-trj.avp(1:10:len,8)));
subplot(3,2,6);
cdfplot(abs(avp_ekf(:,9)-trj.avp(1:10:len,9)));
hold on
cdfplot(abs(avp_ukf(:,9)-trj.avp(1:10:len,9)));
%% 误差输出
fprintf('ekf X轴位置误差最大值%d\n',max(abs(avp_ekf(:,7)-trj.avp(1:10:len,7))));
fprintf('ekf Y轴位置误差最大值%d\n',max(abs(avp_ekf(:,8)-trj.avp(1:10:len,8))));
fprintf('ekf Z轴位置误差最大值%d\n',max(abs(avp_ekf(:,9)-trj.avp(1:10:len,9))));
fprintf('ukf X轴位置误差最大值%d\n',max(abs(avp_ukf(:,7)-trj.avp(1:10:len,7))));相关文章:
【PSINS工具箱】EKF与UKF滤波
描述 对工具箱SINS/GPS,153例程的修改,将EKF和UKF放在一个文件里面,一次运行可以得到两个滤波的结果。 片段 运行截图 程序完整源代码 在有工具箱的情况下,直接运行此代码,即可得到结果 % 基于PSINS工具箱的IMU数据…...

UOS部署oceanbase
安装docker环境。 镜像可在本文档中下载4.2版本的oceanbase 加载镜像 docker load -i oceanbase_4212_x86_64_20231214.tar.gz注意事项 确保挂载点大于200GLOCAL_IP 部署服务器ipNIC_NAME 部署服务器对应的网络OBCLUSTER_IP_LIST 部署服务器ip 启动容器 sudo docker run …...

Hive查询转换与Hadoop生态系统引擎与优势
目录 摘要一、Hive是什么二、HDFS是什么三、Hive与HDFS的关系四、什么是HiveQL五、什么是mapreduce六、Hive如何将查询转为mapreduce任务七、Hadoop生态系统中的高性能引擎八、使用Hadoop的优点 摘要 Hadoop生态系统中包含了多个关键组件,如Hive、HDFS、MapReduce等…...
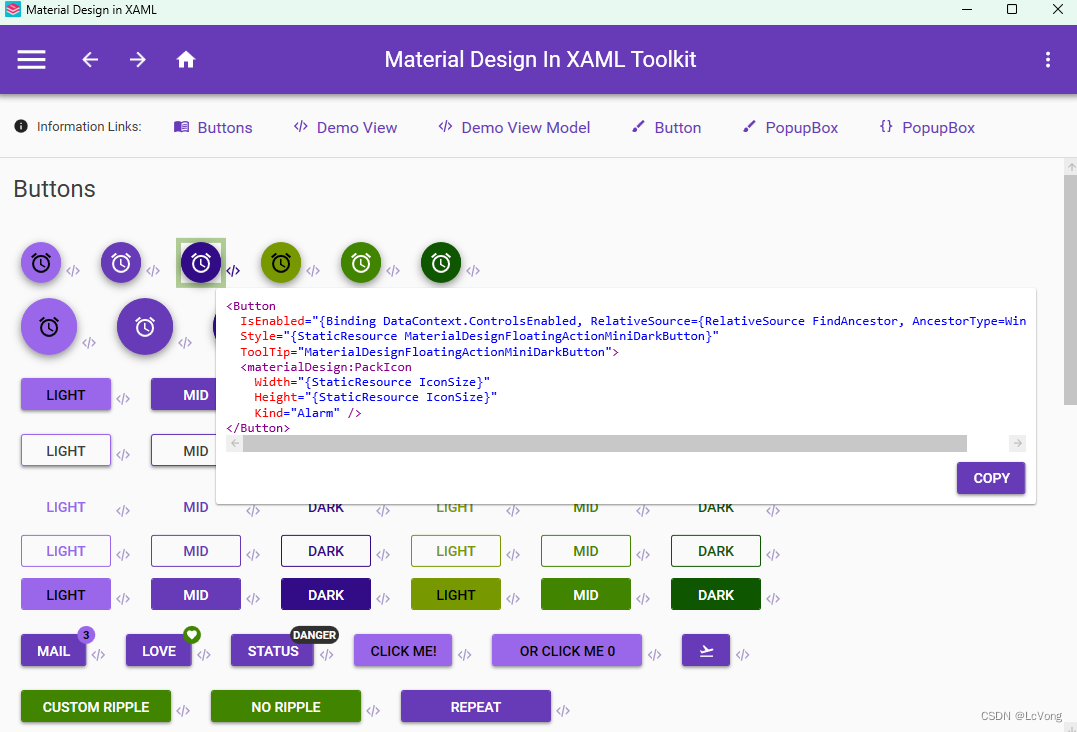
WPF上使用MaterialDesign框架---下载与配置
一、介绍: Material Design语言的一些重要功能包括 系统字体Roboto的升级版本 ,同时颜色更鲜艳,动画效果更突出。杜拉特还简要谈到了新框架的一些变化。谷歌的想法是让谷歌平台上的开发者掌握这个新框架,从而让所有应用就有统一的…...

鸿蒙ARKTS--简易的购物网站
目录 一、media 二、string.json文件 三、pages 3.1 登录页面:gouwuPage.ets 3.2 PageResource.ets 3.3 商品页面:shangpinPage.ets 3.4 我的页面:wodePage.ets 3.5 注册页面:zhucePage.ets 3. 购物网站主页面ÿ…...

LabVIEW转动设备故障诊断系统
LabVIEW转动设备故障诊断系统 随着工业自动化技术的不断进步,转动设备在电力、化工、船舶等多个行业中扮演着越来越重要的角色。然而,这些设备在长期运行过程中难免会出现故障,如果不能及时诊断和处理,将会导致生产效率下降&…...
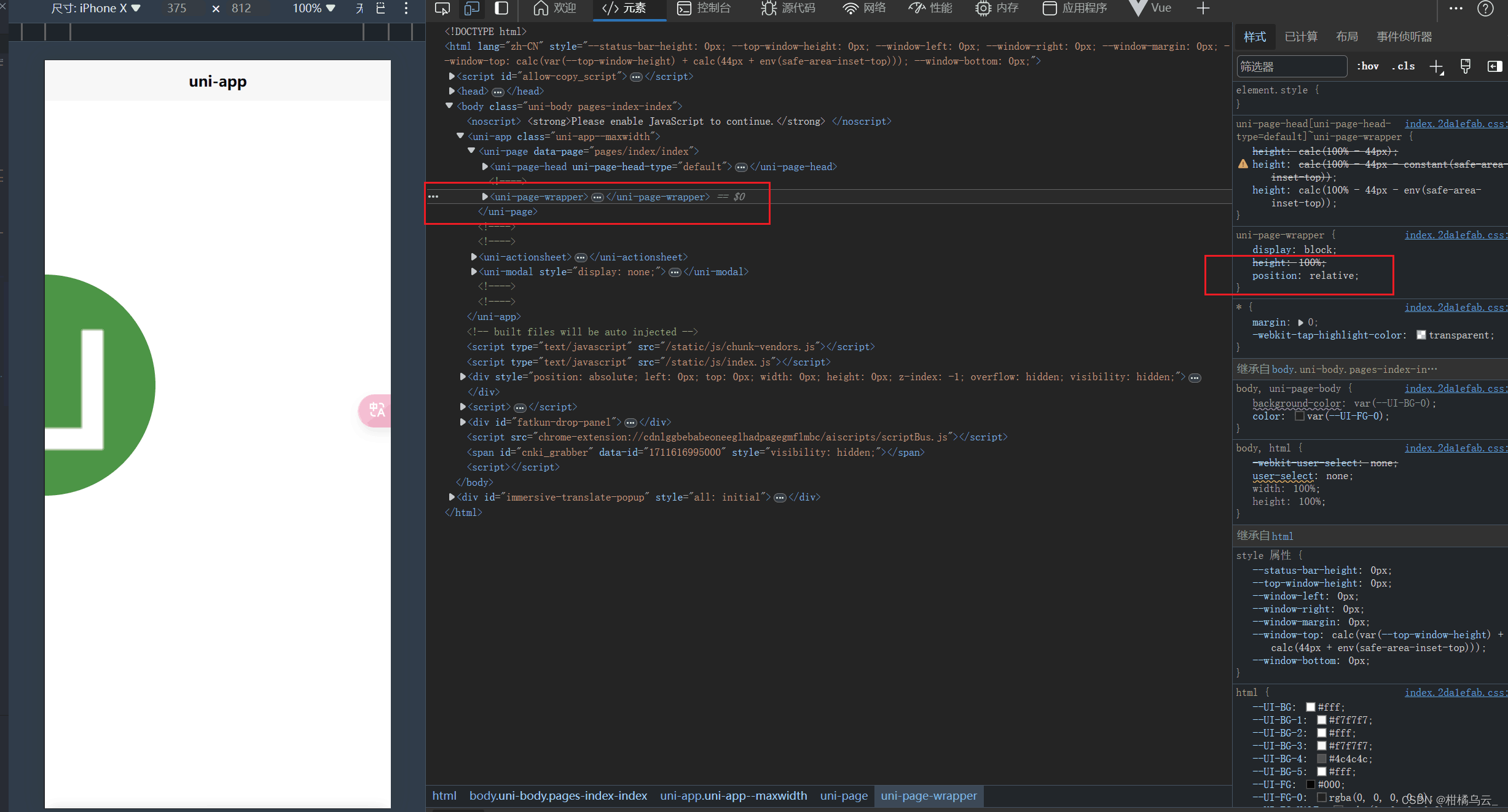
uniapp h5 touch事件踩坑记录
场景:悬浮球功能 当我给悬浮球设置了 position: fixed; 然后监听悬浮球的touch事件,从事件对象中拿到clientY和clientX赋值给悬浮球的left和top属性。当直接赋值后效果应该是这样子: 注意鼠标相对悬浮球的位置,应该就是左上角&a…...
)
webpack.prod.js(webpack生产环境配置文件)
生产环境:只打包不运行本地服务器 对于在config目录下的webpack.prod.js 1.在根目录下运行 npx webpack --config ./config/webpack.prod.js 2.在package.json文件中配置 "build":"npx webpack --config ./config/webpack.prod.js" const …...
,连接数据库和服务器接口,涉及雪花id服务)
利用python做模拟数据(测试数据),连接数据库和服务器接口,涉及雪花id服务
import datetime import jsonimport pymysql import requests import snowflake.client from faker import Faker#cmd启动snowflake服务: #snowflake_start_server --addresslocalhost --port8910 --dc1 --worker1 def create_testers():# 创建一个中文Faker实例fak…...

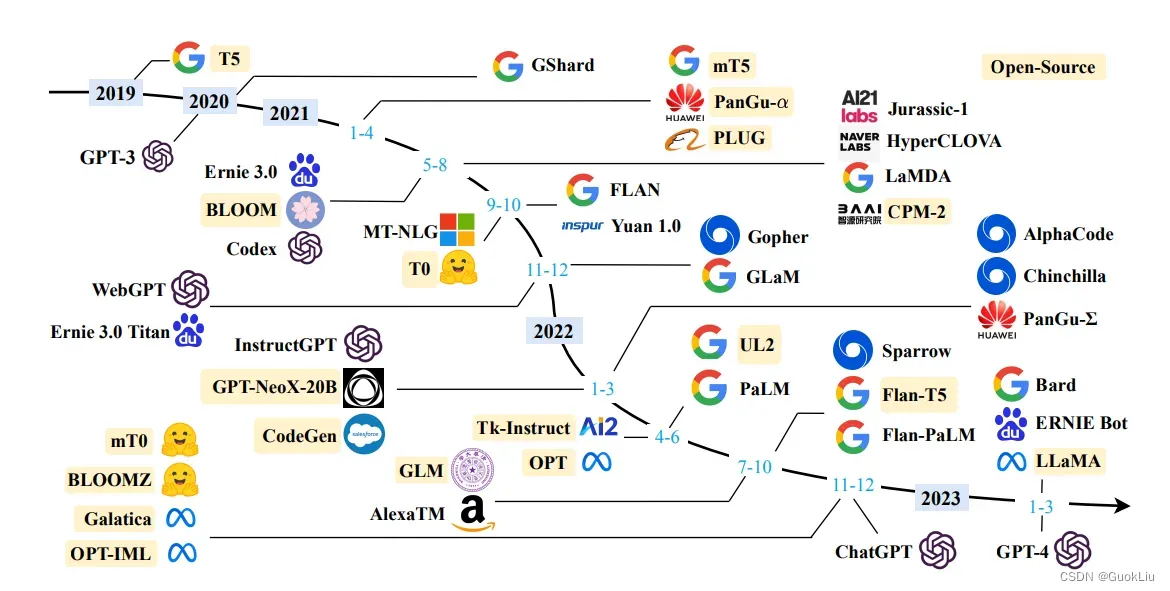
大模型日报2024-03-30
大模型资讯 提升大型语言模型推理速度:高效部署技术 摘要: 随着GPT-4、LLaMA和PaLM等大型语言模型(LLMs)不断拓展自然语言处理的边界,研究人员正在探索加速这些模型推理过程的技术。这些技术旨在提高模型部署的效率,以…...

【ARM 嵌入式 C 入门及渐进 14 -- C 代码中取余与取模的使用介绍】
请阅读【嵌入式开发学习必备专栏 】 文章目录 背景示例 背景 有些文件每行是固定的字符个数,那么如果任意给个字符的序号,怎么通过C 代码获取该字符所在的行呢? 处理这个问题就要用到 C 语言中的取余和取模运算了。 示例 在 C 语言中&…...
C++入门知识详细讲解
C入门知识详细讲解 1. C简介1.1 什么是C1.2 C的发展史1.3. C的重要性1.3.1 语言的使用广泛度1.3.2 在工作领域 2. C基本语法知识2.1. C关键字(C98)2.2. 命名空间2.2 命名空间使用2.2 命名空间使用 2.3. C输入&输出2.4. 缺省参数2.4.1 缺省参数概念2.4.2 缺省参数分类 2.5. …...
:以vggish为例)
pytorch中的torch.hub.load():以vggish为例
pytorch提供了torch.hub.load()函数加载模型,该方法可以从网上直接下载模型或是从本地加载模型。官方文档 torch.hub.load(repo_or_dir, model, *args, sourcegithub, trust_repoNone, force_reloadFalse, verboseTrue, skip_validationFalse, **kwargs)参数说明&a…...
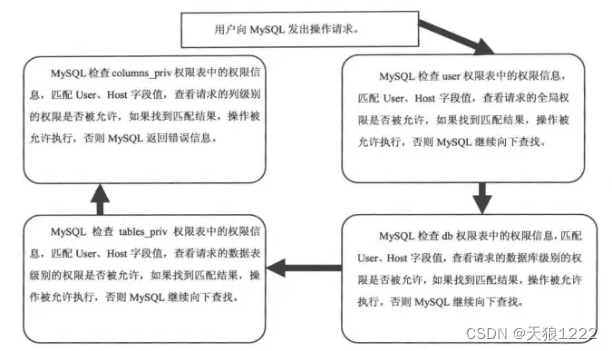
mysql 用户管理-权限管理
学习了用户管理,再学习下权限管理。 3,权限管理 权限管理主要是对登录到MySQL的用户进行权限验证。所有用户的权限都存储在MySQL的权限表中,不合理的权限规划会给MySQL服务器带来安全隐患。数据库管理员要对所有用户的权限进行合理规…...
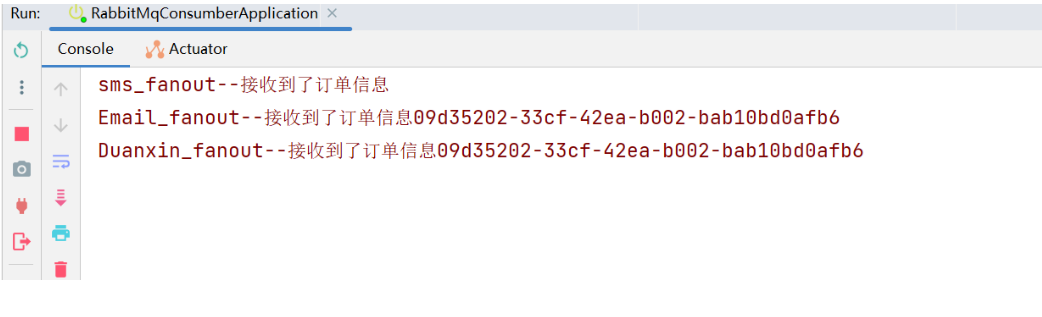
RabbitMQ--04--发布订阅模式 (fanout)-案例
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 发布订阅模式 (fanout)---案例前言RabbitListener和RabbitHandler的使用 1.通过Spring官网快速创建一个RabbitMQ的生产者项目2.导入项目后在application.yml文件中配…...

基于java+SpringBoot+Vue的网上书城管理系统设计与实现
基于javaSpringBootVue的网上书城管理系统设计与实现 开发语言: Java 数据库: MySQL技术: SpringBoot MyBatis工具: IDEA/Eclipse、Navicat、Maven 系统展示 前台展示 后台展示 系统简介 整体功能包含: 网上书城管理系统是一个基于互联网的在线购书平台&#…...
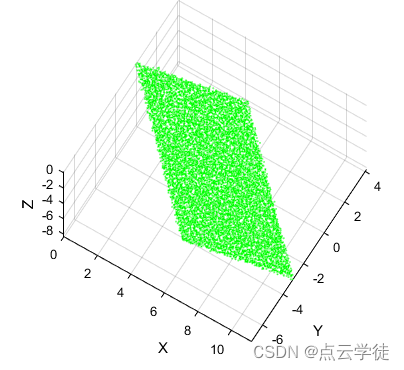
PCL点云处理之M估计样本一致性(MSAC)平面拟合(二百三十六)
PCL点云处理之M估计样本一致性(MSAC)平面拟合(二百三十五六) 一、算法介绍二、使用步骤1.代码2.效果一、算法介绍 写论文当然用RANSAC的优化变种算法MSAC啊,RANSAC太土太LOW了哈哈 MSAC算法(M-estimator Sample Consensus)是RANSAC(Random Sample Consensus)的一种…...
通过WSL在阿里云上部署Vue项目
参考: 阿里云上搭建网站-CSDN博客 云服务器重装 关闭当前运行实例 更换操作系统,还有其他的进入方式。 选择ubuntu系统(和WSL使用相同的系统)。 设置用户和密码。发送短信验证码。 新系统更新。秒速干净的新系统设置完成。 这…...
240330-大模型资源-使用教程-部署方式-部分笔记
A. 大模型资源 Models - Hugging FaceHF-Mirror - Huggingface 镜像站模型库首页 魔搭社区 B. 使用教程 HuggingFace HuggingFace 10分钟快速入门(一),利用Transformers,Pipeline探索AI。_哔哩哔哩_bilibiliHuggingFace快速入…...

uni-app 富文本编辑器
<template><view class"container"><view>标题:<u-input placeholder"请输入标题"></u-input></view><view class"page-body"><view classwrapper><view classtoolbar tap"…...

vscode里如何用git
打开vs终端执行如下: 1 初始化 Git 仓库(如果尚未初始化) git init 2 添加文件到 Git 仓库 git add . 3 使用 git commit 命令来提交你的更改。确保在提交时加上一个有用的消息。 git commit -m "备注信息" 4 …...

手游刚开服就被攻击怎么办?如何防御DDoS?
开服初期是手游最脆弱的阶段,极易成为DDoS攻击的目标。一旦遭遇攻击,可能导致服务器瘫痪、玩家流失,甚至造成巨大经济损失。本文为开发者提供一套简洁有效的应急与防御方案,帮助快速应对并构建长期防护体系。 一、遭遇攻击的紧急应…...
超短脉冲激光自聚焦效应
前言与目录 强激光引起自聚焦效应机理 超短脉冲激光在脆性材料内部加工时引起的自聚焦效应,这是一种非线性光学现象,主要涉及光学克尔效应和材料的非线性光学特性。 自聚焦效应可以产生局部的强光场,对材料产生非线性响应,可能…...

ubuntu搭建nfs服务centos挂载访问
在Ubuntu上设置NFS服务器 在Ubuntu上,你可以使用apt包管理器来安装NFS服务器。打开终端并运行: sudo apt update sudo apt install nfs-kernel-server创建共享目录 创建一个目录用于共享,例如/shared: sudo mkdir /shared sud…...

C++:std::is_convertible
C++标志库中提供is_convertible,可以测试一种类型是否可以转换为另一只类型: template <class From, class To> struct is_convertible; 使用举例: #include <iostream> #include <string>using namespace std;struct A { }; struct B : A { };int main…...
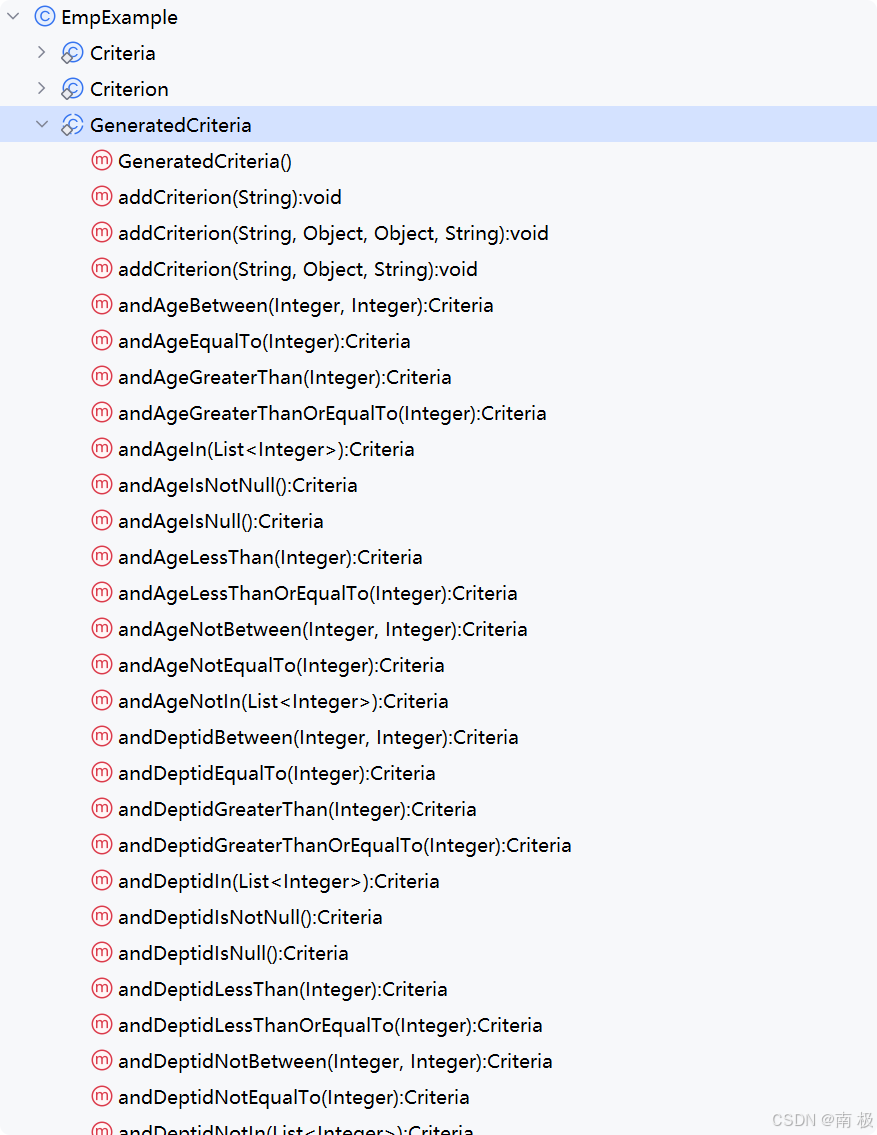
Mybatis逆向工程,动态创建实体类、条件扩展类、Mapper接口、Mapper.xml映射文件
今天呢,博主的学习进度也是步入了Java Mybatis 框架,目前正在逐步杨帆旗航。 那么接下来就给大家出一期有关 Mybatis 逆向工程的教学,希望能对大家有所帮助,也特别欢迎大家指点不足之处,小生很乐意接受正确的建议&…...

STM32+rt-thread判断是否联网
一、根据NETDEV_FLAG_INTERNET_UP位判断 static bool is_conncected(void) {struct netdev *dev RT_NULL;dev netdev_get_first_by_flags(NETDEV_FLAG_INTERNET_UP);if (dev RT_NULL){printf("wait netdev internet up...");return false;}else{printf("loc…...
【机器视觉】单目测距——运动结构恢复
ps:图是随便找的,为了凑个封面 前言 在前面对光流法进行进一步改进,希望将2D光流推广至3D场景流时,发现2D转3D过程中存在尺度歧义问题,需要补全摄像头拍摄图像中缺失的深度信息,否则解空间不收敛…...
STM32标准库-DMA直接存储器存取
文章目录 一、DMA1.1简介1.2存储器映像1.3DMA框图1.4DMA基本结构1.5DMA请求1.6数据宽度与对齐1.7数据转运DMA1.8ADC扫描模式DMA 二、数据转运DMA2.1接线图2.2代码2.3相关API 一、DMA 1.1简介 DMA(Direct Memory Access)直接存储器存取 DMA可以提供外设…...

基于当前项目通过npm包形式暴露公共组件
1.package.sjon文件配置 其中xh-flowable就是暴露出去的npm包名 2.创建tpyes文件夹,并新增内容 3.创建package文件夹...