ids工业相机与电控位移台同步控制及数据采集
通过VS2017和OpenCV,实现ids工业相机与电控位移台同步控制及数据采集
- 目录
- 项目环境配置
- 代码流程及思路
- 项目架构
- 项目开发运行效果
- 开发关键
- ids相机配置
- 位移台环境配置
- 相机头文件
- 相机参数设置
- 保存图像函数设置
- 电控位移台头文件
- 电控位移台设置参数
- 最后就是通过main函数进行调用和控制,需要注意的是,最好能加上sleep函数,这样采集图像不容易出问题
目录
光学数据采集系统中,经常需要采集几万个样本点进行数据分析,如果通过人工数据采集,人工成本太高,同时容易出现测量误差等因素。因此需要根据项目功能开发一套自动化采集图像和位移控制的工程项目,以下是具体内容:
项目环境配置
代码环境:
VS2017
OpenCV3.4.2
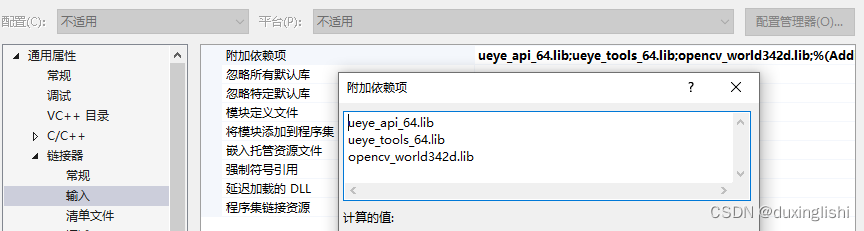
ids开发包,包括.lib、.dll、.h文件等
LBtek电控五相位移平台,.dll、.h文件
代码流程及思路
- 相机初始化,根据图像尺寸申请内存地址;
- 导出图像内存指针,设置传感器参数
- 初始化位移台,新建类
- 通过dll查找位移台函数指针,调用函数
- 设置边界条件及步进电机参数
- 通过函数返回值与延时等机制,实现相机同步
- 批量化图像采集与数据处理
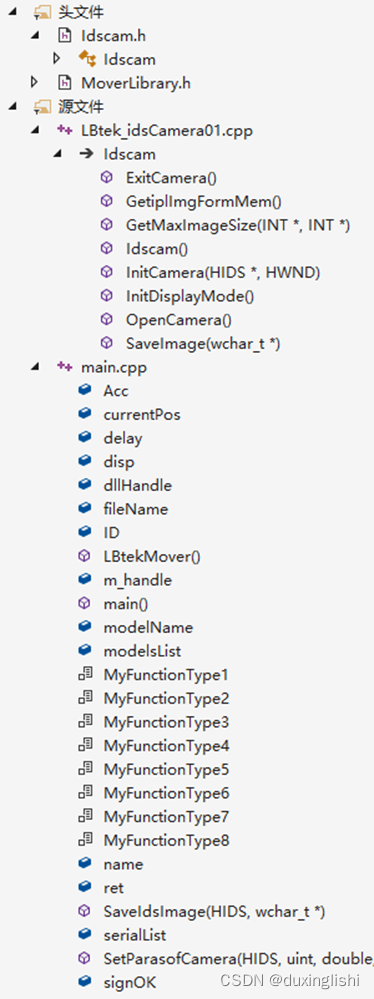
项目架构
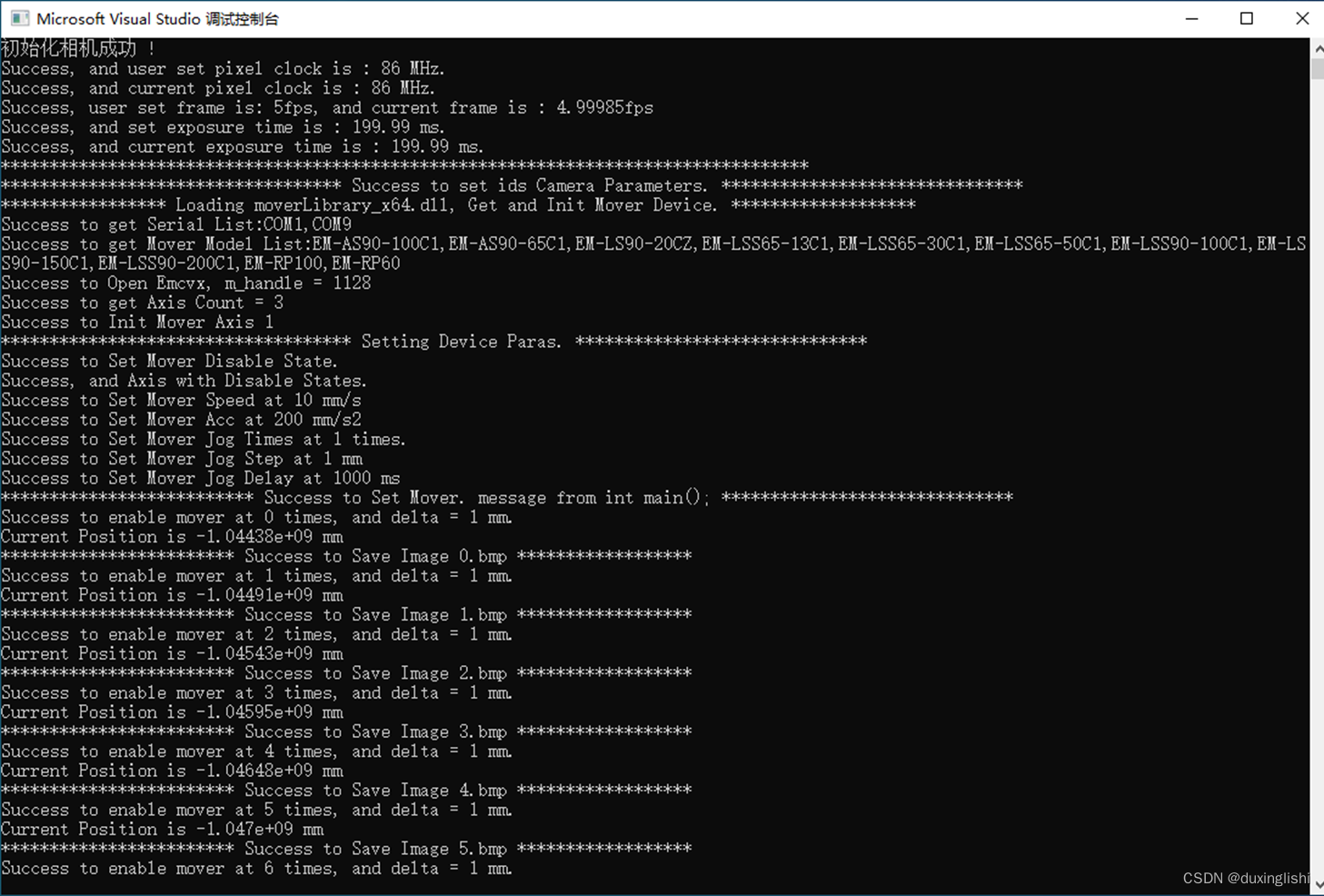
项目开发运行效果
开发关键
相机和位移台属于商业产品,商家不提供完整程序包,只给出dll动态链接库,需要通过函数指针调用接口。
通过算法自定义位移台运行模式;
提升图像增益及伽马校正,自定义图像采集AOI,提升采集帧率;
ids相机配置
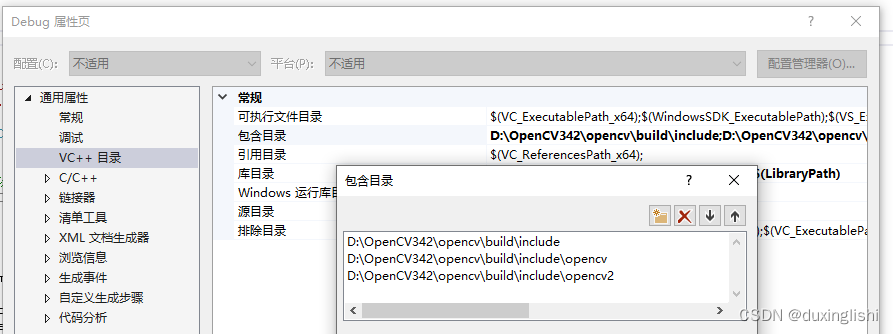
本文是基于debug x64模式下,C++ 环境运行,需要一老OpenCV的部分库函数,进行图像展示和保存。
OpenCV环境配置:具体配置方法CSDN其他博客都有记录,是通用的,
比如我之前配置旧版本的环境,大家可以参考: link
;

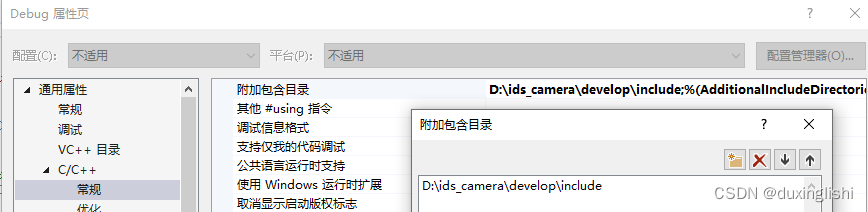
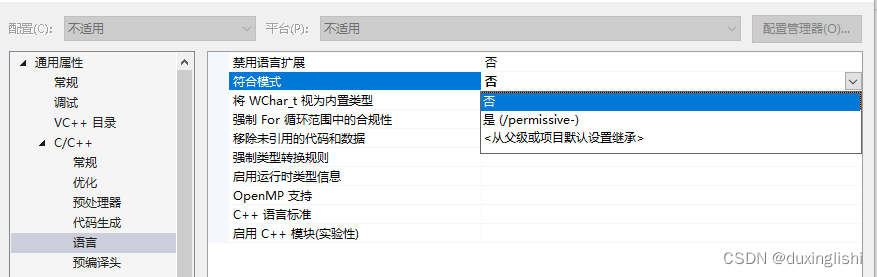
大家要注意,将这里的语言 符合模式 设置为否,原因是ids相机开发包里面存储文件的时候,使用的是wchat_t *的格式,调试过程中很容易出问题。如下图设置
 相机环境配置完成。
相机环境配置完成。
位移台环境配置
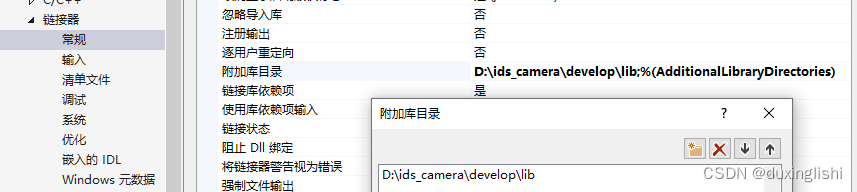
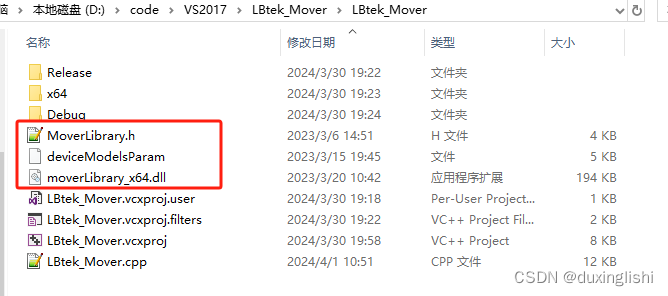
由于开发包里面只提供了配置文件、.dll文件、.h文件,函数实现方法是不知道的,因此调用函数的时候是将这三个文件放置到项目代码包中,通过函数指针调用函数,配置说明书摸索函数功能。
这一部分环境配置就是将这几个文件放置到工程项目文件夹中即可。
相机头文件
#include "ueye.h"
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>class Idscam {public:Idscam();INT InitCamera(HIDS *hCam, HWND hWnd); //初始化相机 hWnd指向显示图像窗口的指针,若用DIB模式可以令hWnd=NULL bool OpenCamera();void ExitCamera();int InitDisplayMode();void GetMaxImageSize(INT *pnSizeX, INT *pnSizeY);//查询相机支持的图像格式void SaveImage(wchar_t* fileName);bool GetiplImgFormMem(); //从视频数据流中将图像数据拷贝给IplImage// uEye variblesHIDS m_hCam; // 相机句柄HWND m_hWndDisplay; // window显示句柄INT m_nColorMode; // Y8/RGB16/RGB24/REG32INT m_nBitsPerPixel; // 图像位深INT m_nSizeX; // 图像宽度INT m_nSizeY; // 图像高度INT m_nPosX; // 图像左偏移INT m_nPosY; // 图像右偏移cv::Mat CamMat;IplImage *iplImg;char *m_pLastBuffer;private:// 使用位图模式进行实时显示需要的内存 INT m_lMemoryId; // camera memory - buffer IDchar* m_pcImageMemory; // camera memory - pointer to bufferSENSORINFO m_sInfo; // sensor information structINT m_nRenderMode; // render modeINT m_nFlipHor; // 水平翻转标志INT m_nFlipVert; // 垂直翻转标志}; 相机参数设置
int SetParasofCamera(HIDS hCam, uint nPixelClockSet, double nFramePerSecondSet, double nExposureTimeSet) {// 像素时钟查询与设置UINT nPixelClockDefault, nPixelClockCurrent;INT nRet;/*// 获取默认像素时钟nRet = is_PixelClock(hCam, IS_PIXELCLOCK_CMD_GET_DEFAULT, (void*)&nPixelClockDefault, sizeof(nPixelClockDefault));if (nRet == IS_SUCCESS) {cout << "Success, and default pixel clock is : " << nPixelClockDefault << " MHz." << endl;}else {cout << "Failed to get default pixel clock" << endl;return IS_NO_SUCCESS;}*/// 设置该像素时钟//nPixelClockSet = 86; //设置为80MHznRet = is_PixelClock(hCam, IS_PIXELCLOCK_CMD_SET, (void*)&nPixelClockSet, sizeof(nPixelClockSet));if (nRet == IS_SUCCESS) {cout << "Success, and user set pixel clock is : " << nPixelClockSet << " MHz." << endl;}else {cout << "Failed to set pixel clock" << endl;return IS_NO_SUCCESS;}// 获取当前像素时钟nRet = is_PixelClock(hCam, IS_PIXELCLOCK_CMD_GET, (void*)&nPixelClockCurrent, sizeof(nPixelClockCurrent));if (nRet == IS_SUCCESS) {cout << "Success, and current pixel clock is : " << nPixelClockCurrent << " MHz." << endl;}else {cout << "Failed to get current pixel clock" << endl;return IS_NO_SUCCESS;}cout << "***********************************************************************************" << endl;/*// 相机帧率范围查询与设置double nFrameMin, nFrameMax, nFrameIntervall;nRet = is_GetFrameTimeRange(hCam, &nFrameMin, &nFrameMax, &nFrameIntervall);if (nRet == IS_SUCCESS) {cout << "Success, Min Frame = " << 1 / nFrameMax << "fps, Max Frame = " << 1 / nFrameMin << "fps, and Frame Intervall = " << nFrameIntervall << "fps." << endl;}else {cout << "Failed to get nFrameMin, nFrameMax, nFrameIntervall." << endl;return IS_NO_SUCCESS;}*/// 设置、并查询 当前相机采集帧率double nFramesPerSecondCurrent;nRet = is_SetFrameRate(hCam相关文章:
ids工业相机与电控位移台同步控制及数据采集
通过VS2017和OpenCV,实现ids工业相机与电控位移台同步控制及数据采集 目录项目环境配置代码流程及思路项目架构项目开发运行效果开发关键ids相机配置位移台环境配置相机头文件相机参数设置保存图像函数设置电控位移台头文件电控位移台设置参数最后就是通过main函数进行调用和控…...
景联文科技提供高质量医疗健康AI大模型数据
医疗行业是典型的知识和技术密集型行业,其发展水平直接关系到国民健康和生命质量。 医疗健康AI大模型,作为人工智能的一个分支,能够通过学习大量的数据来生成新的数据实例,在医药研发、医学影像、医疗文本分析等都有广泛的应用前景…...

【Python第三方库】lxml 解析器和xpath路径语言
1.lxml是做什么的 是xml/html的解析器,主要是用来解析和提取html/xml数据 2.lxml语法 使用etree.HTML(html字符串),将字符串转换为Element对象通过使用Element对象.xpath(语法)提取信息,返回的是一个列表的内存地址,需要通过使用索引获取信…...
Java(Lambda、集合)、题解
一、Lambda表达式 标准格式 ()对应方法的形参 ;->固定格式 注意点: Lambda表达式可以用来简化匿名内部类的书写 Lambda表达式只能简化函数式接口的匿名内部类的写法 函数式接口: 有且仅有一个抽象方法的接口叫做函数式接口&…...
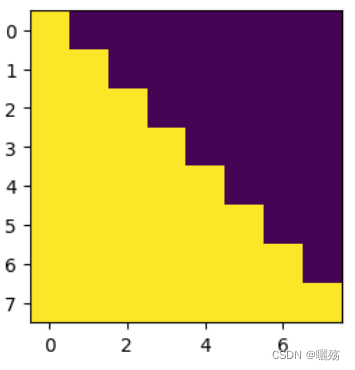
Transformer学习: Transformer小模块学习--位置编码,多头自注意力,掩码矩阵
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 Transformer学习 1 位置编码模块1.1 PE代码1.2 测试PE1.3 原文代码 2 多头自注意力模块2.1 多头自注意力代码2.2 测试多头注意力 3 未来序列掩码矩阵3.1 代码3.2 测试掩码 1 …...

easyexcel 动态列导出
1. 引入easyexcel <dependency><groupId>com.alibaba</groupId><artifactId>easyexcel</artifactId><version>3.2.1</version></dependency> 2.导出write public void export(HttpServletResponse response) {try {String f…...
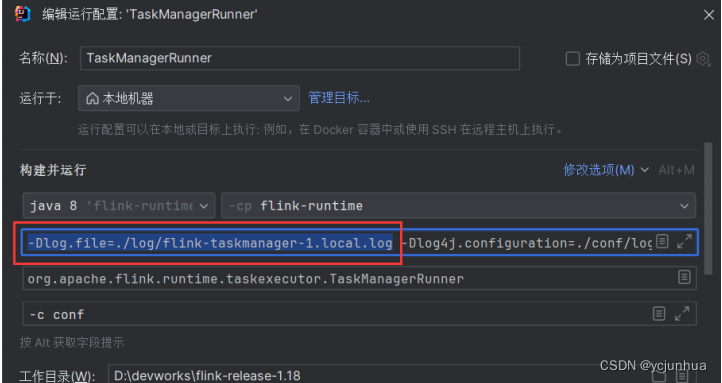
flink源码编译-job提交
1、启动standalone集群的taskmanager standalone集群中的taskmanager启动类为 TaskManagerRunner 2 打开master启动类 通过 ctrln快捷键,找到、并打开类: org.apache.flink.runtime.taskexecutor.TaskManagerRunner 3 修改运⾏配置 基本完全按照mas…...
Mysql密码修改问题
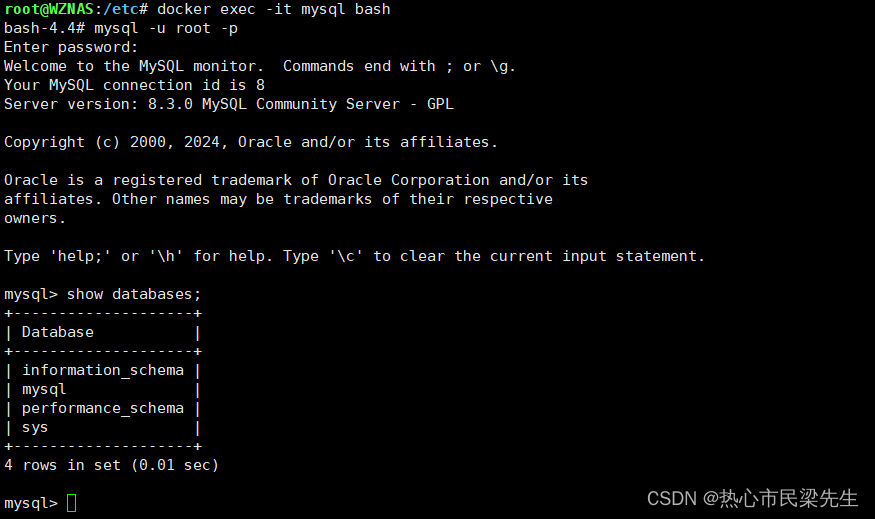
docker安装mysql,直接拉取镜像,挂载关键目录即可启动,默认3306端口。此时无法直接连接,需要配置密码。docker进入mysql容器中 docker exec -it mysql bash #mysq是容器名称,也可以用容器id通过修改mysql的配置进行免密…...

建独立站,对FP商家有什么好处?
2024年都过去四分之一了,还有许多人对是否投身于跨境独立站领域仍犹豫不决。然而,观望不如实践,如果渴望在跨境电商领域开创一片新天地,那么现在就是行动的最佳时机。 特别是对于FP商家来说,由于电商平台对于黑五类产品…...
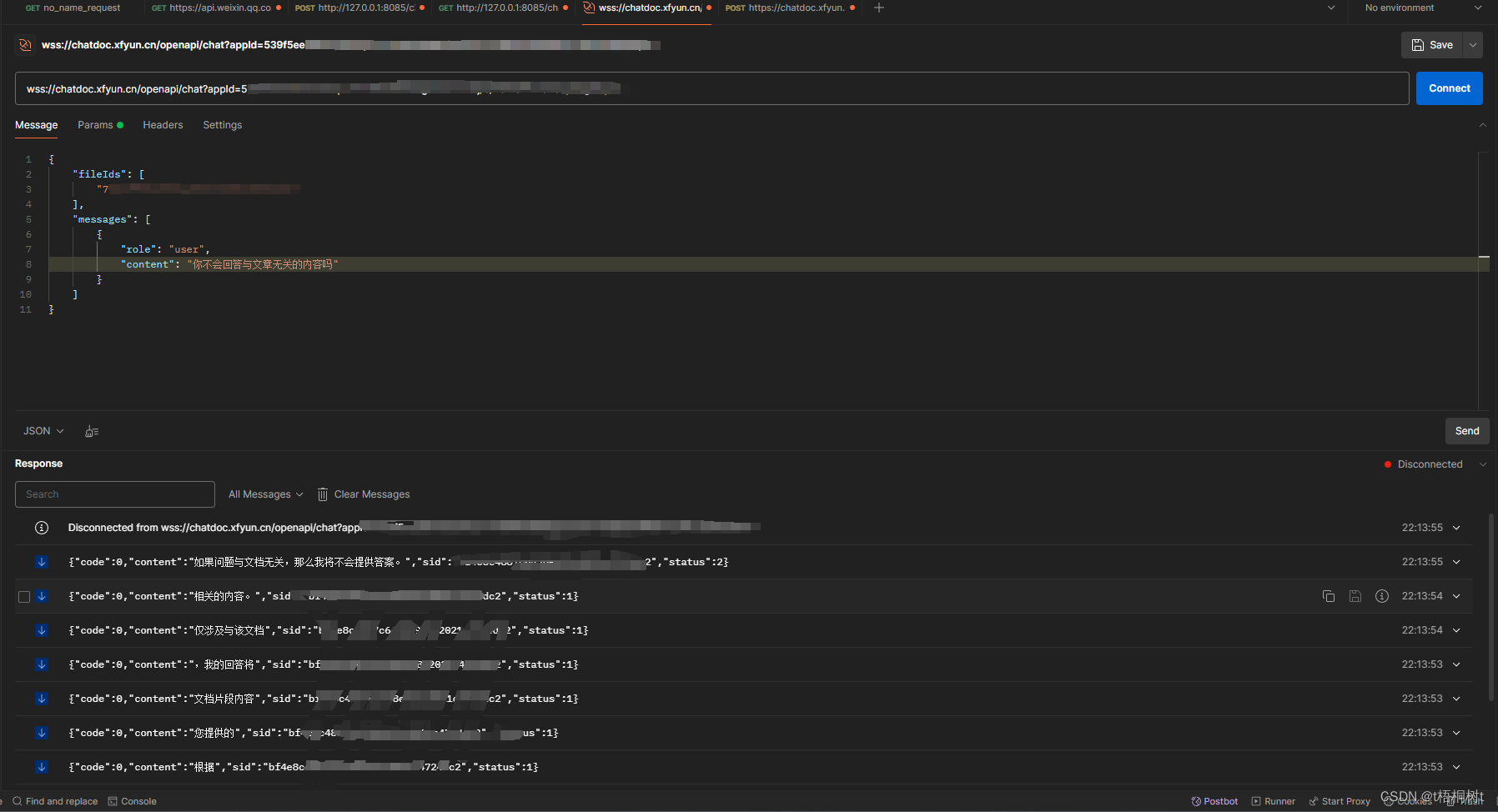
使用Postman进行websocket接口测试
因为最近要搞关于基于AI的文本接口测试.需要用到websocket协议,于是看了一下发现postman也可以测而且很方便 位置 File->New->WebSocket 可以看到不止WebSocket还支持其他的各种协议 使用 首先先点击connect进行连接 连接成功之后可以选择多种文本格式添加请求参数 每…...

Android音视频开发 - MediaMetadataRetriever 相关
Android音视频开发 - MediaMetadataRetriever 相关 MediaMetadataRetriever 是android中用于从媒体文件中提取元数据新的类. 可以获取音频,视频和图像文件的各种信息,如时长,标题,封面等. 1:初始化对象 private MediaMetadataRetriever mediaMetadataRetriever new MediaMe…...
注解(Annotation)
10.1 注解概述 10.1.1 什么是注解 注解(Annotation)是从JDK5.0开始引入,以“注解名”在代码中存在。例如: Override Deprecated SuppressWarnings(value”unchecked”) Annotation 可以像修饰符一样被使用,可用于修饰…...
蓝桥杯:七步诗 ← bfs
【题目来源】https://www.lanqiao.cn/problems/3447/learning/【题目描述】 煮豆燃豆苴,豆在釜中泣。本是同根生,相煎何太急?---曹植 所以,这道题目关乎豆子! 话说赤壁之战结束后,曹操的船舰被刘备烧了,引领军队从华容…...
Vue 如何快速上手
目录 1. Vue 是什么 (概念) 1.1. Vue 的两种使用方式 1.2. 优点 1.3. 缺点 2. 创建 Vue 实例,初始化渲染 2.1. 步骤(核心步骤 4步) 2.2. 练习——创建一个Vue实例 3. 插值表达式 {{ }} 3.1. 介绍 3.2. 作用…...

Vue3:组件间通信-provide和inject实现祖先组件与后代组件间直接通信
一、情景说明 我们学习了很多的组件间通信 这里在学习一种,祖先组件与后代组件间通信的技术 这里的后代,可以是多层继承关系,子组件,子子组件,子子子组件等等。 在祖先组件中通过provide配置向后代组件提供数据在后代…...

微信小程序——小程序和页面生命周期详解
小程序的生命周期 小程序的生命周期主要分为以下几个阶段: 创建(onLoad): 当小程序启动时,或者从其他页面跳转到当前页面时,会触发 onLoad 生命周期函数。 这个阶段通常用于初始化页面数据,从服…...

android studio中添加module依赖
android常用的三种依赖 库依赖(Library dependency):以访问网址的形式将依赖库相应版本下载到本地; 文件依赖(File dependency): 将下载下来的依赖库以.jar文件的形式添加依赖. module依赖(Modu…...
【.NET全栈】.NET全栈学习路线
一、微软官方C#学习 https://learn.microsoft.com/zh-cn/dotnet/csharp/tour-of-csharp/ C#中的数据类型 二、2021 ASP.NET Core 开发者路线图 GitHub地址:https://github.com/MoienTajik/AspNetCore-Developer-Roadmap/blob/master/ReadMe.zh-Hans.md 三、路线…...
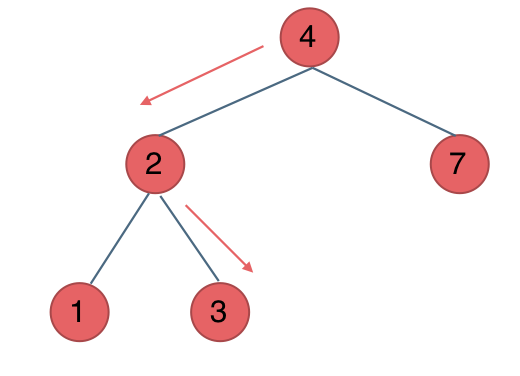
代码随想录阅读笔记-二叉树【二叉搜索树中的搜索】
题目 给定二叉搜索树(BST)的根节点和一个值。 你需要在BST中找到节点值等于给定值的节点。 返回以该节点为根的子树。 如果节点不存在,则返回 NULL。 例如, 在上述示例中,如果要找的值是 5,但因为没有节点…...

1、初识drf
drf的学习需要学习者有django基本使用知识。 文章目录 什么是drf,有什么作用CBV是什么初步使用drf 下载以及django创建项目django最小启动内容修改setting修改 url 编写drf视图编辑url测试返回结果 什么是drf,有什么作用 drf(django rest-framework),让…...

IDEA运行Tomcat出现乱码问题解决汇总
最近正值期末周,有很多同学在写期末Java web作业时,运行tomcat出现乱码问题,经过多次解决与研究,我做了如下整理: 原因: IDEA本身编码与tomcat的编码与Windows编码不同导致,Windows 系统控制台…...
linux之kylin系统nginx的安装
一、nginx的作用 1.可做高性能的web服务器 直接处理静态资源(HTML/CSS/图片等),响应速度远超传统服务器类似apache支持高并发连接 2.反向代理服务器 隐藏后端服务器IP地址,提高安全性 3.负载均衡服务器 支持多种策略分发流量…...

Linux链表操作全解析
Linux C语言链表深度解析与实战技巧 一、链表基础概念与内核链表优势1.1 为什么使用链表?1.2 Linux 内核链表与用户态链表的区别 二、内核链表结构与宏解析常用宏/函数 三、内核链表的优点四、用户态链表示例五、双向循环链表在内核中的实现优势5.1 插入效率5.2 安全…...
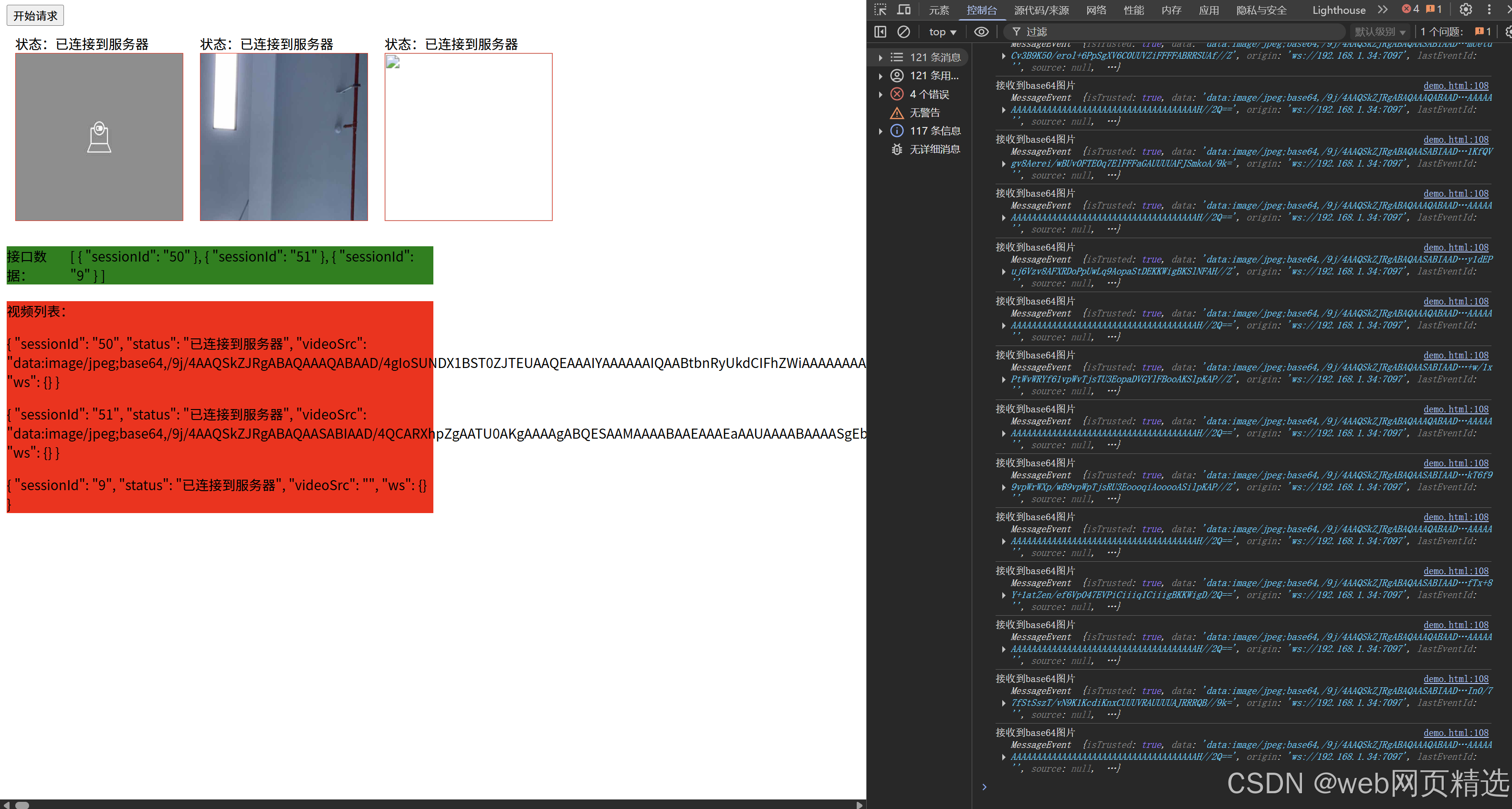
uniapp微信小程序视频实时流+pc端预览方案
方案类型技术实现是否免费优点缺点适用场景延迟范围开发复杂度WebSocket图片帧定时拍照Base64传输✅ 完全免费无需服务器 纯前端实现高延迟高流量 帧率极低个人demo测试 超低频监控500ms-2s⭐⭐RTMP推流TRTC/即构SDK推流❌ 付费方案 (部分有免费额度&#x…...
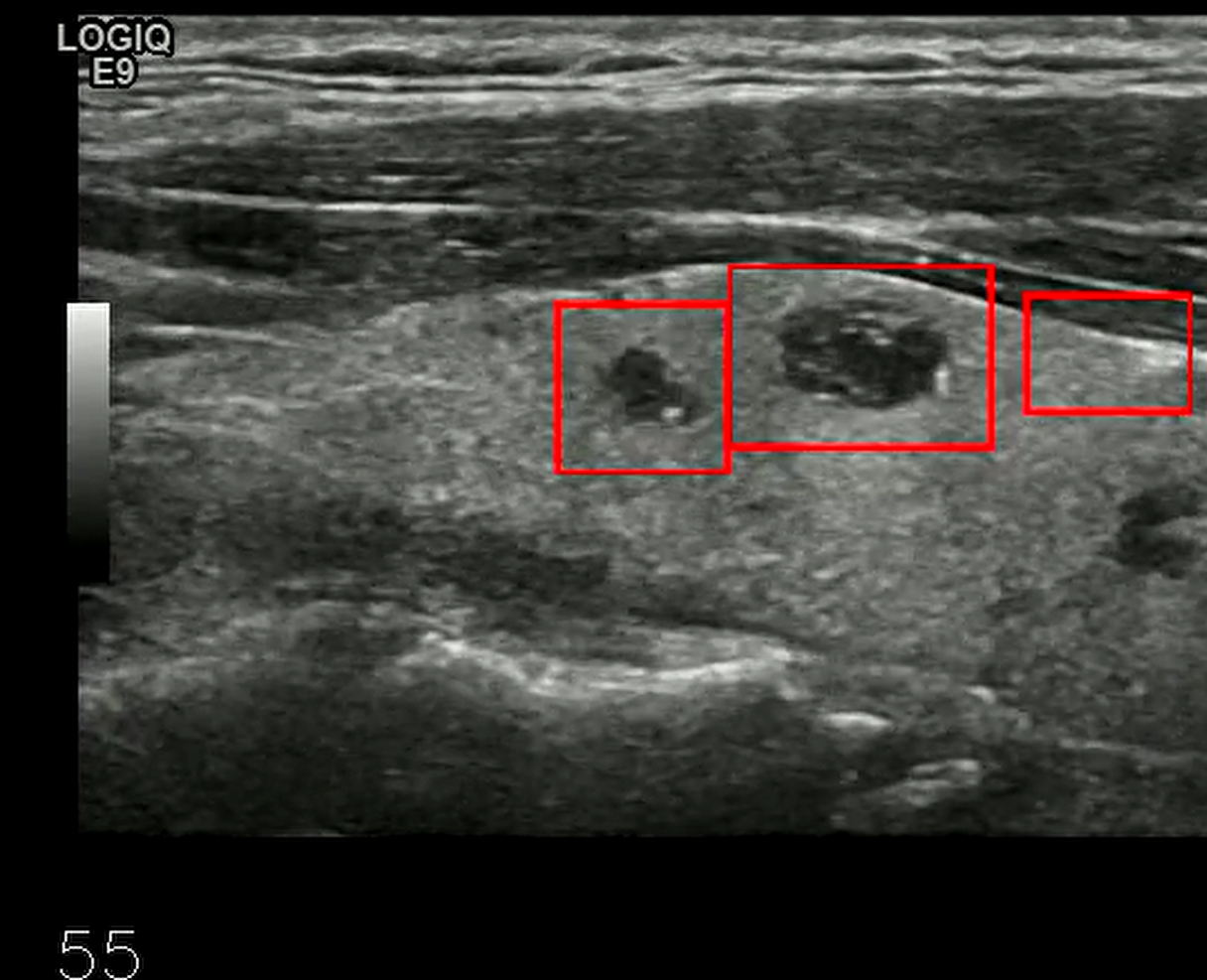
【开发技术】.Net使用FFmpeg视频特定帧上绘制内容
目录 一、目的 二、解决方案 2.1 什么是FFmpeg 2.2 FFmpeg主要功能 2.3 使用Xabe.FFmpeg调用FFmpeg功能 2.4 使用 FFmpeg 的 drawbox 滤镜来绘制 ROI 三、总结 一、目的 当前市场上有很多目标检测智能识别的相关算法,当前调用一个医疗行业的AI识别算法后返回…...

技术栈RabbitMq的介绍和使用
目录 1. 什么是消息队列?2. 消息队列的优点3. RabbitMQ 消息队列概述4. RabbitMQ 安装5. Exchange 四种类型5.1 direct 精准匹配5.2 fanout 广播5.3 topic 正则匹配 6. RabbitMQ 队列模式6.1 简单队列模式6.2 工作队列模式6.3 发布/订阅模式6.4 路由模式6.5 主题模式…...
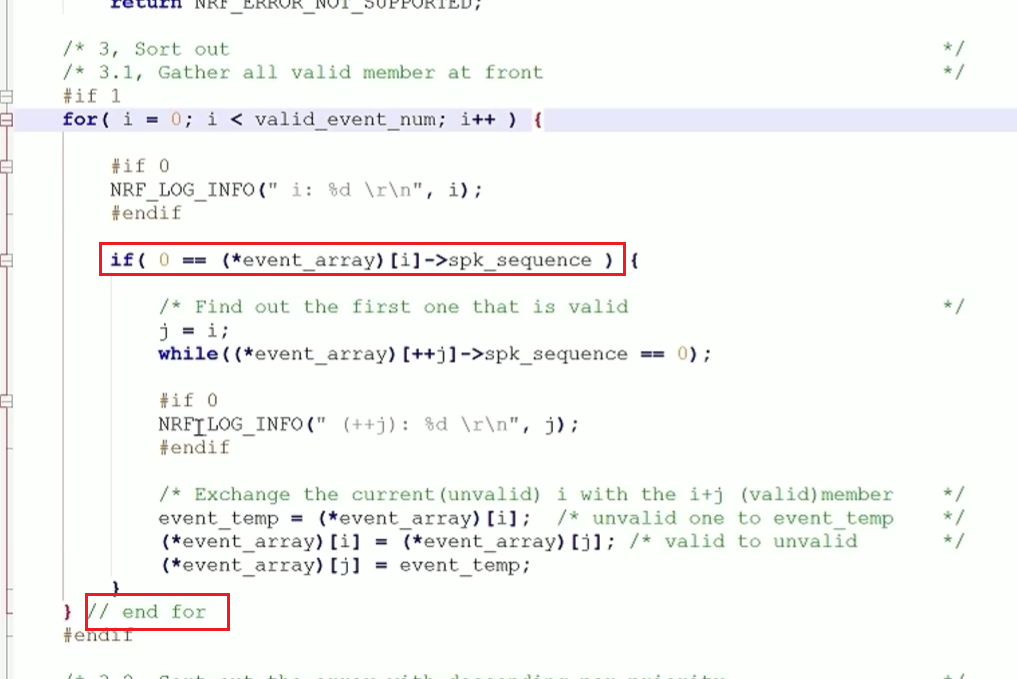
代码规范和架构【立芯理论一】(2025.06.08)
1、代码规范的目标 代码简洁精炼、美观,可持续性好高效率高复用,可移植性好高内聚,低耦合没有冗余规范性,代码有规可循,可以看出自己当时的思考过程特殊排版,特殊语法,特殊指令,必须…...
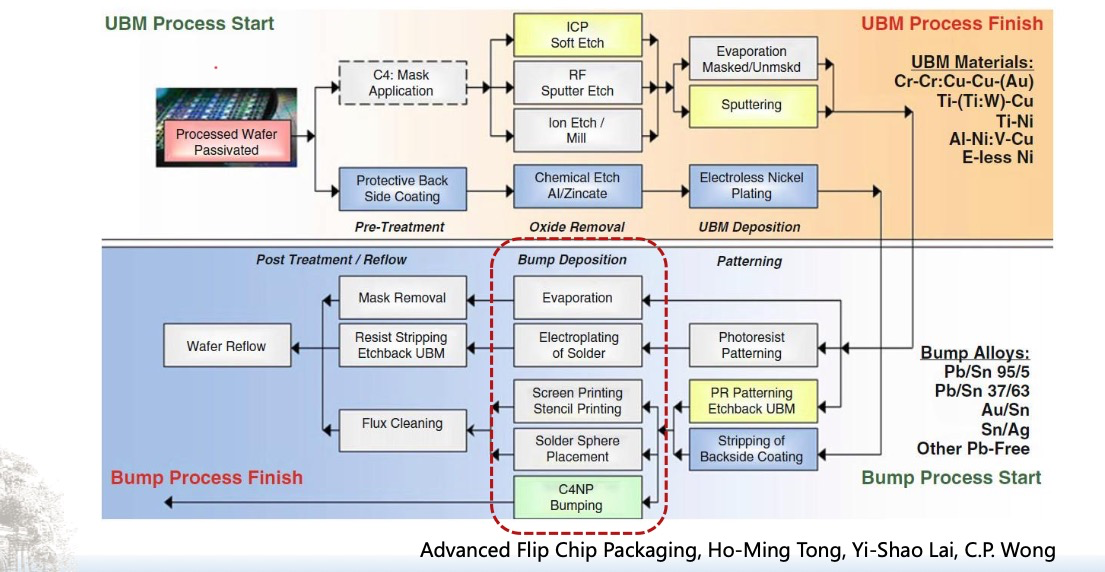
倒装芯片凸点成型工艺
UBM(Under Bump Metallization)与Bump(焊球)形成工艺流程。我们可以将整张流程图分为三大阶段来理解: 🔧 一、UBM(Under Bump Metallization)工艺流程(黄色区域ÿ…...
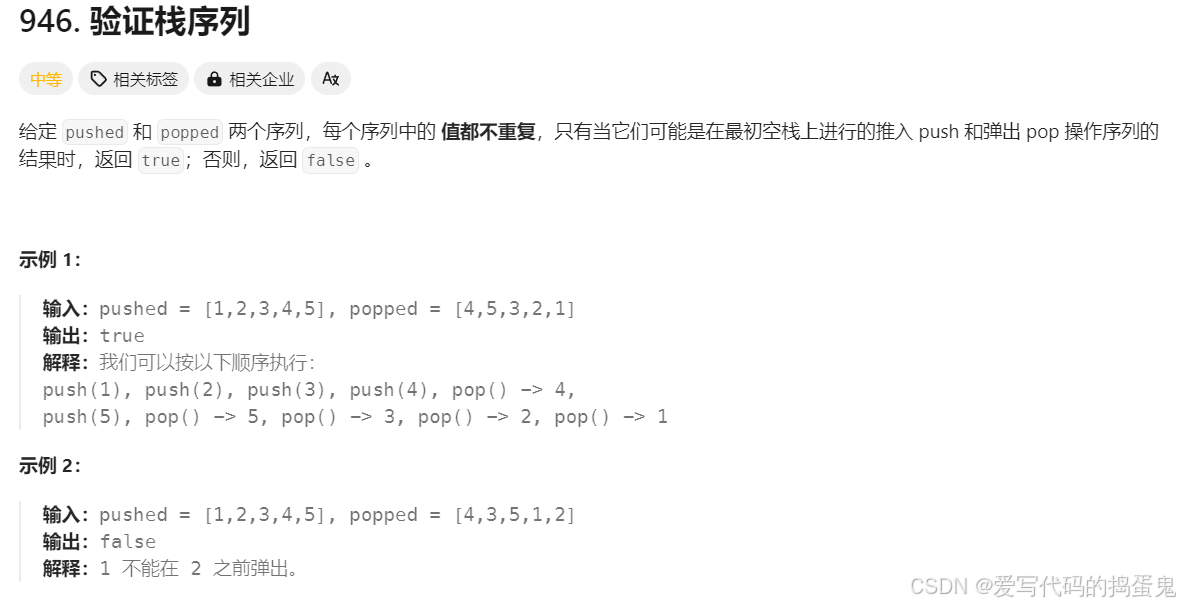
算法—栈系列
一:删除字符串中的所有相邻重复项 class Solution { public:string removeDuplicates(string s) {stack<char> st;for(int i 0; i < s.size(); i){char target s[i];if(!st.empty() && target st.top())st.pop();elsest.push(s[i]);}string ret…...
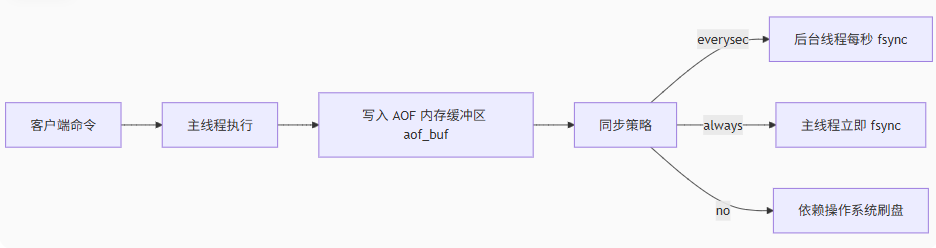
Redis上篇--知识点总结
Redis上篇–解析 本文大部分知识整理自网上,在正文结束后都会附上参考地址。如果想要深入或者详细学习可以通过文末链接跳转学习。 1. 基本介绍 Redis 是一个开源的、高性能的 内存键值数据库,Redis 的键值对中的 key 就是字符串对象,而 val…...