传统方法(OpenCV)_车道线识别
一、思路
基于OpenCV的库:对视频中的车道线进行识别
1、视频处理:视频读取
2、图像转换:图像转换为灰度图
3、噪声去除:高斯模糊对图像进行去噪,提高边缘检测的准确性
4、边缘检测:Canny算法进行边缘检测,找出图像中边缘
5、区域裁剪:定义ROI(Region of Interest,感兴趣区域),裁剪出这个区域的边缘检测结果
6、直线检测:霍夫变换对ROI区域进行直线检测,找出车道线
7、结果展示:将检测到的车道线画在原图/视频上
二、实施流程:
1. 高斯模糊、Canny边缘检测、霍夫变换
import numpy as np
import cv2blur_ksize = 5 # 高斯模糊核大小
canny_lthreshold = 50 # Canny边缘检测低阈值
canny_hthreshold = 150 # Canny边缘检测高阈值
# 霍夫变换参数
rho = 1 #rho的步长,即直线到图像原点(0,0)点的距离
theta = np.pi / 180 #theta的范围
threshold = 15 #累加器中的值高于它时才认为是一条直线
min_line_length = 40 #线的最短长度,比这个短的都被忽略
max_line_gap = 20 #两条直线之间的最大间隔,小于此值,认为是一条直线2、定义roi_mask函数,用于保留感兴趣区域,屏蔽掉图像中不需要处理的部分,例如天空、树木等,只保留路面部分,从而提高后续处理的效率和准确性。
#img是输入的图像,verticess是兴趣区的四个点的坐标(三维的数组)
def roi_mask(img, vertices):mask = np.zeros_like(img) #生成与输入图像相同大小的图像,并使用0填充,图像为黑色mask_color = 255cv2.fillPoly(mask, vertices, mask_color) #使用白色填充多边形,形成蒙板masked_img = cv2.bitwise_and(img, mask) #img&mask,经过此操作后,兴趣区域以外的部分被蒙住了,只留下兴趣区域的图像return masked_img3、定义draw_lines函数,用于后续对检测到的车道线进行绘制图线。
# 对图像进行画线
def draw_lines(img, lines, color=[255, 255, 0], thickness=2):for line in lines:for x1, y1, x2, y2 in line:cv2.line(img, (x1, y1), (x2, y2), color, thickness)4、定义hough_lines函数,用于通过霍夫变换检测出图像中的直线,然后根据这些直线执行draw_lines函数画出车道线
def hough_lines(img, rho, theta, threshold,min_line_len, max_line_gap):lines = cv2.HoughLinesP(img, rho, theta, threshold, np.array([]),minLineLength=min_line_len,maxLineGap=max_line_gap)line_img = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8) #生成绘制直线的绘图板,黑底# draw_lines(line_img, lines)draw_lanes(line_img, lines)return line_img5、定义draw_lanes函数,用于根据霍夫变换检测到的直线,分类、清理、拟合、绘制出车道线
def draw_lanes(img, lines, color=[255, 255, 0], thickness=8):left_lines, right_lines = [], [] #用于存储左边和右边的直线for line in lines: #对直线进行分类for x1, y1, x2, y2 in line:k = (y2 - y1) / (x2 - x1)if k < 0:left_lines.append(line)else:right_lines.append(line)if (len(left_lines) <= 0 or len(right_lines) <= 0):return imgclean_lines(left_lines, 0.1) #弹出左侧不满足斜率要求的直线clean_lines(right_lines, 0.1) #弹出右侧不满足斜率要求的直线left_points = [(x1, y1) for line in left_lines for x1, y1, x2, y2 in line] #提取左侧直线族中的所有的第一个点left_points = left_points + [(x2, y2) for line in left_lines for x1, y1, x2, y2 in line] #提取左侧直线族中的所有的第二个点right_points = [(x1, y1) for line in right_lines for x1, y1, x2, y2 in line] #提取右侧直线族中的所有的第一个点right_points = right_points + [(x2, y2) for line in right_lines for x1, y1, x2, y2 in line] #提取右侧侧直线族中的所有的第二个点left_vtx = calc_lane_vertices(left_points, 325, img.shape[0]) #拟合点集,生成直线表达式,并计算左侧直线在图像中的两个端点的坐标right_vtx = calc_lane_vertices(right_points, 325, img.shape[0]) #拟合点集,生成直线表达式,并计算右侧直线在图像中的两个端点的坐标cv2.line(img, left_vtx[0], left_vtx[1], color, thickness) #画出左侧直线cv2.line(img, right_vtx[0], right_vtx[1], color, thickness) #画出右侧直线6、定义clean_lines函数,用于将斜率不满足要求的直线去除,即不进行绘制
#将不满足斜率要求的直线弹出
def clean_lines(lines, threshold):slope = [(y2 - y1) / (x2 - x1) for line in lines for x1, y1, x2, y2 in line]while len(lines) > 0:mean = np.mean(slope) #计算斜率的平均值,因为后面会将直线和斜率值弹出diff = [abs(s - mean) for s in slope] #计算每条直线斜率与平均值的差值idx = np.argmax(diff) #计算差值的最大值的下标if diff[idx] > threshold: #将差值大于阈值的直线弹出slope.pop(idx) #弹出斜率lines.pop(idx) #弹出直线else:break7、定义calc_lane_vertices函数,用于根据给定的点集拟合一条直线,并计算这条直线在图像中的两个端点的坐标
#拟合点集,生成直线表达式,并计算直线在图像中的两个端点的坐标
def calc_lane_vertices(point_list, ymin, ymax):x = [p[0] for p in point_list] #提取xy = [p[1] for p in point_list] #提取yfit = np.polyfit(y, x, 1) #用一次多项式x=a*y+b拟合这些点,fit是(a,b)fit_fn = np.poly1d(fit) #生成多项式对象a*y+bxmin = int(fit_fn(ymin)) #计算这条直线在图像中最左侧的横坐标xmax = int(fit_fn(ymax)) #计算这条直线在图像中最右侧的横坐标return [(xmin, ymin), (xmax, ymax)]8、编写主函数。首先读取视频并获取每一帧,如果读取帧失败(即视频已经播放完毕),则跳出循环;接着对读取到的帧进行一系列处理,包括转换为灰度图、高斯模糊、Canny边缘检测、生成ROI掩膜、霍夫直线检测等;然后将处理后的图像与原图融合,得到最终的结果;最后显示结果图像,如果按下Esc键,则跳出循环,即关闭所有窗口
if __name__ == '__main__':try:cap = cv2.VideoCapture('./video_1.mp4')if (cap.isOpened()): # 视频打开成功flag = 1else:flag = 0num = 0if (flag):while (True):ret,frame = cap.read() # 读取一帧if ret == False: # 读取帧失败breakgray = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY) #图像转换为灰度图blur_gray = cv2.GaussianBlur(gray, (blur_ksize, blur_ksize), 0, 0) #使用高斯模糊去噪声edges = cv2.Canny(blur_gray, canny_lthreshold, canny_hthreshold) #使用Canny进行边缘检测roi_vtx = np.array([[(0, frame.shape[0]), (460, 325),(520, 325), (frame.shape[1], frame.shape[0])]]) ##目标区域的四个点坐标,roi_vtx是一个三维的数组roi_edges = roi_mask(edges, roi_vtx) #对边缘检测的图像生成图像蒙板,去掉不感兴趣的区域,保留兴趣区line_img = hough_lines(roi_edges, rho, theta, threshold,min_line_length, max_line_gap) #使用霍夫直线检测,并且绘制直线res_img = cv2.addWeighted(frame, 0.8, line_img, 1, 0) #将处理后的图像与原图做融合cv2.imshow('meet',res_img)if cv2.waitKey(30) & 0xFF == 27:breakcv2.waitKey(0)cv2.destroyAllWindows()except:pass# 使用环境dlcv/001#1、
import numpy as np
import cv2blur_ksize = 5 # 高斯模糊核大小
canny_lthreshold = 50 # Canny边缘检测低阈值
canny_hthreshold = 150 # Canny边缘检测高阈值
# 霍夫变换参数
rho = 1 # rho的步长,即直线到图像原点(0,0)点的距离
theta = np.pi / 180 # theta的范围
threshold = 15 # 累加器中的值高于它时才认为是一条直线
min_line_length = 40 # 线的最短长度,比这个短的都被忽略
max_line_gap = 20 # 两条直线之间的最大间隔,小于此值,认为是一条直线#2、
#img是输入的图像,verticess是兴趣区的四个点的坐标(三维的数组)
def roi_mask(img, vertices):mask = np.zeros_like(img) #生成与输入图像相同大小的图像,并使用0填充,图像为黑色mask_color = 255cv2.fillPoly(mask, vertices, mask_color) #使用白色填充多边形,形成蒙板masked_img = cv2.bitwise_and(img, mask) #img&mask,经过此操作后,兴趣区域以外的部分被蒙住了,只留下兴趣区域的图像return masked_img#3、
# 对图像进行画线
def draw_lines(img, lines, color=[255, 255, 0], thickness=2):for line in lines:for x1, y1, x2, y2 in line:cv2.line(img, (x1, y1), (x2, y2), color, thickness)#4、
def hough_lines(img, rho, theta, threshold,min_line_len, max_line_gap):lines = cv2.HoughLinesP(img, rho, theta, threshold, np.array([]),minLineLength=min_line_len,maxLineGap=max_line_gap)line_img = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8) #生成绘制直线的绘图板,黑底# draw_lines(line_img, lines)draw_lanes(line_img, lines)return line_img#5、
def draw_lanes(img, lines, color=[255, 255, 0], thickness=8):left_lines, right_lines = [], [] # 用于存储左边和右边的直线for line in lines: # 对直线进行分类for x1, y1, x2, y2 in line:k = (y2 - y1) / (x2 - x1)if k < 0:left_lines.append(line)else:right_lines.append(line)if (len(left_lines) <= 0 or len(right_lines) <= 0):return imgclean_lines(left_lines, 0.1) # 弹出左侧不满足斜率要求的直线clean_lines(right_lines, 0.1) # 弹出右侧不满足斜率要求的直线left_points = [(x1, y1) for line in left_lines for x1, y1, x2, y2 in line] # 提取左侧直线族中的所有的第一个点left_points = left_points + [(x2, y2) for line in left_lines for x1, y1, x2, y2 in line] # 提取左侧直线族中的所有的第二个点right_points = [(x1, y1) for line in right_lines for x1, y1, x2, y2 in line] # 提取右侧直线族中的所有的第一个点right_points = right_points + [(x2, y2) for line in right_lines for x1, y1, x2, y2 in line] # 提取右侧侧直线族中的所有的第二个点left_vtx = calc_lane_vertices(left_points, 325, img.shape[0]) # 拟合点集,生成直线表达式,并计算左侧直线在图像中的两个端点的坐标right_vtx = calc_lane_vertices(right_points, 325, img.shape[0]) # 拟合点集,生成直线表达式,并计算右侧直线在图像中的两个端点的坐标cv2.line(img, left_vtx[0], left_vtx[1], color, thickness) # 画出左侧直线cv2.line(img, right_vtx[0], right_vtx[1], color, thickness) # 画出右侧直线#6、
#将不满足斜率要求的直线弹出
def clean_lines(lines, threshold):slope = [(y2 - y1) / (x2 - x1) for line in lines for x1, y1, x2, y2 in line]while len(lines) > 0:mean = np.mean(slope) #计算斜率的平均值,因为后面会将直线和斜率值弹出diff = [abs(s - mean) for s in slope] #计算每条直线斜率与平均值的差值idx = np.argmax(diff) #计算差值的最大值的下标if diff[idx] > threshold: #将差值大于阈值的直线弹出slope.pop(idx) #弹出斜率lines.pop(idx) #弹出直线else:break#7、
#拟合点集,生成直线表达式,并计算直线在图像中的两个端点的坐标
def calc_lane_vertices(point_list, ymin, ymax):x = [p[0] for p in point_list] #提取xy = [p[1] for p in point_list] #提取yfit = np.polyfit(y, x, 1) #用一次多项式x=a*y+b拟合这些点,fit是(a,b)fit_fn = np.poly1d(fit) #生成多项式对象a*y+bxmin = int(fit_fn(ymin)) #计算这条直线在图像中最左侧的横坐标xmax = int(fit_fn(ymax)) #计算这条直线在图像中最右侧的横坐标return [(xmin, ymin), (xmax, ymax)]#8、
if __name__ == '__main__':try:cap = cv2.VideoCapture('1.mp4')if (cap.isOpened()): # 视频打开成功flag = 1else:flag = 0num = 0if (flag):while (True):ret,frame = cap.read() # 读取一帧if ret == False: # 读取帧失败breakgray = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY) #图像转换为灰度图blur_gray = cv2.GaussianBlur(gray, (blur_ksize, blur_ksize), 0, 0) #使用高斯模糊去噪声edges = cv2.Canny(blur_gray, canny_lthreshold, canny_hthreshold) #使用Canny进行边缘检测roi_vtx = np.array([[(0, frame.shape[0]), (460, 325),(520, 325), (frame.shape[1], frame.shape[0])]]) ##目标区域的四个点坐标,roi_vtx是一个三维的数组roi_edges = roi_mask(edges, roi_vtx) #对边缘检测的图像生成图像蒙板,去掉不感兴趣的区域,保留兴趣区line_img = hough_lines(roi_edges, rho, theta, threshold,min_line_length, max_line_gap) #使用霍夫直线检测,并且绘制直线res_img = cv2.addWeighted(frame, 0.8, line_img, 1, 0) #将处理后的图像与原图做融合cv2.imshow('meet',res_img)if cv2.waitKey(30) & 0xFF == 27:breakcv2.waitKey(0)cv2.destroyAllWindows()except:pass
# 使用环境dlcv/001from moviepy.editor import VideoFileClip
import cv2
import numpy as np
# 高斯滤波核大小
blur_ksize = 5
# Canny边缘检测高低阈值
canny_lth = 50
canny_hth = 150
# 霍夫变换参数
rho = 1
theta = np.pi / 180
threshold = 15
min_line_len = 40
max_line_gap = 20
def process_an_image(img):# 1. 灰度化、滤波和Cannygray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)blur_gray = cv2.GaussianBlur(gray, (blur_ksize, blur_ksize), 1)edges = cv2.Canny(blur_gray, canny_lth, canny_hth)# 2. 标记四个坐标点用于ROI截取rows, cols = edges.shapepoints = np.array([[(0, rows), (460, 325), (520, 325), (cols, rows)]])# [[[0 540], [460 325], [520 325], [960 540]]]roi_edges = roi_mask(edges, points)# 3. 霍夫直线提取drawing, lines = hough_lines(roi_edges, rho, theta,threshold, min_line_len, max_line_gap)# 4. 车道拟合计算draw_lanes(drawing, lines)# 5. 最终将结果合在原图上result = cv2.addWeighted(img, 0.9, drawing, 0.2, 0)return result
def roi_mask(img, corner_points):# 创建掩膜mask = np.zeros_like(img)cv2.fillPoly(mask, corner_points, 255)masked_img = cv2.bitwise_and(img, mask)return masked_img
def hough_lines(img, rho, theta, threshold, min_line_len, max_line_gap):# 统计概率霍夫直线变换lines = cv2.HoughLinesP(img, rho, theta, threshold,minLineLength=min_line_len, maxLineGap=max_line_gap)# 新建一副空白画布drawing = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8)# 画出直线检测结果# draw_lines(drawing, lines)return drawing, lines
def draw_lines(img, lines, color=[0, 0, 255], thickness=1):for line in lines:for x1, y1, x2, y2 in line:cv2.line(img, (x1, y1), (x2, y2), color, thickness)
def draw_lanes(img, lines, color=[255, 0, 0], thickness=8):# a. 划分左右车道left_lines, right_lines = [], []for line in lines:for x1, y1, x2, y2 in line:k = (y2 - y1) / (x2 - x1)if k < 0:left_lines.append(line)else:right_lines.append(line)if (len(left_lines) <= 0 or len(right_lines) <= 0):return# b. 清理异常数据clean_lines(left_lines, 0.1)clean_lines(right_lines, 0.1)# c. 得到左右车道线点的集合,拟合直线left_points = [(x1, y1) for line in left_lines for x1, y1, x2, y2 in line]left_points = left_points + [(x2, y2)for line in left_lines for x1, y1, x2, y2 in line]right_points = [(x1, y1)for line in right_lines for x1, y1, x2, y2 in line]right_points = right_points + \[(x2, y2) for line in right_lines for x1, y1, x2, y2 in line]left_results = least_squares_fit(left_points, 325, img.shape[0])right_results = least_squares_fit(right_points, 325, img.shape[0])# 注意这里点的顺序vtxs = np.array([[left_results[1], left_results[0], right_results[0], right_results[1]]])# d.填充车道区域cv2.fillPoly(img, vtxs, (0, 255, 0))# 或者只画车道线# cv2.line(img, left_results[0], left_results[1], (0, 255, 0), thickness)# cv2.line(img, right_results[0], right_results[1], (0, 255, 0), thickness)
def clean_lines(lines, threshold):# 迭代计算斜率均值,排除掉与差值差异较大的数据slope = [(y2 - y1) / (x2 - x1)for line in lines for x1, y1, x2, y2 in line]while len(lines) > 0:mean = np.mean(slope)diff = [abs(s - mean) for s in slope]idx = np.argmax(diff)if diff[idx] > threshold:slope.pop(idx)lines.pop(idx)else:break
def least_squares_fit(point_list, ymin, ymax):# 最小二乘法拟合x = [p[0] for p in point_list]y = [p[1] for p in point_list]# polyfit第三个参数为拟合多项式的阶数,所以1代表线性fit = np.polyfit(y, x, 1)fit_fn = np.poly1d(fit) # 获取拟合的结果xmin = int(fit_fn(ymin))xmax = int(fit_fn(ymax))return [(xmin, ymin), (xmax, ymax)]# 主函数:
if __name__ == "__main__":output = 'output4.mp4'# cap = cv2.VideoCapture('3.mp4')clip = VideoFileClip("4.mp4")out_clip = clip.fl_image(process_an_image)out_clip.write_videofile(output, audio=False)# #8、
# if __name__ == '__main__':
# try:
# cap = cv2.VideoCapture('3.mp4')
# if (cap.isOpened()): # 视频打开成功
# flag = 1
# else:
# flag = 0
# num = 0
# if (flag):
# while (True):
# ret,frame = cap.read() # 读取一帧
# if ret == False: # 读取帧失败
# break# gray = cv2.cvtColor(frame, cv2.COLOR_RGB2GRAY) #图像转换为灰度图# blur_gray = cv2.GaussianBlur(gray, (blur_ksize, blur_ksize), 0, 0) #使用高斯模糊去噪声# edges = cv2.Canny(blur_gray, canny_lthreshold, canny_hthreshold) #使用Canny进行边缘检测# roi_vtx = np.array([[(0, frame.shape[0]), (460, 325),# (520, 325), (frame.shape[1], frame.shape[0])]]) ##目标区域的四个点坐标,roi_vtx是一个三维的数组# roi_edges = roi_mask(edges, roi_vtx) #对边缘检测的图像生成图像蒙板,去掉不感兴趣的区域,保留兴趣区# line_img = hough_lines(roi_edges, rho, theta, threshold,# min_line_length, max_line_gap) #使用霍夫直线检测,并且绘制直线# res_img = cv2.addWeighted(frame, 0.8, line_img, 1, 0) #将处理后的图像与原图做融合# cv2.imshow('meet',res_img)# if cv2.waitKey(30) & 0xFF == 27:# break# cv2.waitKey(0)# cv2.destroyAllWindows()# except:# pass相关文章:
传统方法(OpenCV)_车道线识别
一、思路 基于OpenCV的库:对视频中的车道线进行识别 1、视频处理:视频读取 2、图像转换:图像转换为灰度图 3、噪声去除:高斯模糊对图像进行去噪,提高边缘检测的准确性 4、边缘检测:Canny算法进行边缘检测…...

Git以及Gitlab的快速使用文档
优质博文:IT-BLOG-CN 安装git 【1】Windows为例,去百度下载安装包。或者去官网下载。安装过秳返里略过,一直下一步即可。丌要忉记设置环境发量。 【2】打开cmd,输入git –version正确输出版本后则git安装成功。 配置ssh Git和s…...

MyBatis Interceptor拦截器高级用法
拦截插入操作 场景描述:插入当前数据时,同时复制当前数据插入多行。比如平台权限的用户,可以同时给其他国家级别用户直接插入数据 实现: import lombok.extern.slf4j.Slf4j; import org.apache.ibatis.executor.Executor; impor…...
——进阶功能)
Python学习入门(2)——进阶功能
14. 迭代器和迭代协议 在Python中,迭代器是支持迭代操作的对象,即它们可以一次返回其成员中的一个。任何实现了 __iter__() 和 __next__() 方法的对象都是迭代器。 class Count:def __init__(self, low, high):self.current lowself.high highdef __i…...

华为改进点
华为公司可以在员工福利方面做出改进,提高员工的工作满意度和忠诚度。例如,可以增加员工福利,如提供更多灵活的工作时间、提供更好的培训和发展机会、加大健康保障和福利待遇等。 此外,华为公司也可以加强与客户的沟通与合作&…...

分布式技术---------------消息队列中间件之 Kafka
目录 一、Kafka 概述 1.1为什么需要消息队列(MQ) 1.2使用消息队列的好处 1.2.1解耦 1.2.2可恢复性 1.2.3缓冲 1.2.4灵活性 & 峰值处理能力 1.2.5异步通信 1.3消息队列的两种模式 1.3.1点对点模式(一对一,消费者主动…...

BGP扩展知识总结
一、BGP的宣告问题 在BGP协议中每台运行BGP的设备上,宣告本地直连路由在BGP协议中运行BGP协议的设备,来宣告通过IGP学习到的未运行BGP协议设备产生的路由;(常见) 在BGP协议中宣告本地路由表中路由条目时,将…...

华为OD-C卷-按身高和体重排队[100分]
题目描述 某学校举行运动会,学生们按编号(1、2、3…n)进行标识,现需要按照身高由低到高排列,对身高相同的人,按体重由轻到重排列;对于身高体重都相同的人,维持原有的编号顺序关系。请输出排列后的学生编号…...
云原生(八)、Kubernetes基础(一)
K8S 基础 # 获取登录令牌 kubectl create token admin --namespace kubernetes-dashboard1、 NameSpace Kubernetes 启动时会创建四个初始名字空间 default:Kubernetes 包含这个名字空间,以便于你无需创建新的名字空间即可开始使用新集群。 kube-node-lease: 该…...

Linux 系统解压缩文件
Linux系统,可以使用unzip命令来解压zip文件 方法如下 1. 打开终端,在命令行中输入以下命令来安装unzip: sudo apt-get install unzip 1 2. 假设你想要将zip文件解压缩到名为"target_dir"的目录中,在终端中切换到目标路…...

linux如何使 CPU使用率保持在指定百分比?
目录 方法1:(固定在100%) 方法2:(可以指定0~100%) 方法3:使用ChaosBlade工具(0~100%) 方法1:(固定在100%) for i in seq 1 $(cat /pro…...
的简介、安装、使用方法之详细攻略)
LLMs之Morphic:Morphic(一款具有生成式用户界面的人工智能答案引擎)的简介、安装、使用方法之详细攻略
LLMs之Morphic:Morphic(一款具有生成式用户界面的人工智能答案引擎)的简介、安装、使用方法之详细攻略 目录 Morphic的简介 1、技术栈 Morphic的安装和使用方法 1、克隆仓库 2、安装依赖 3、填写密钥 4、本地运行应用 部署 Morphic的简介 2024年4月初发布ÿ…...
[react] useState的一些小细节
1.无限循环 因为setState修改是异步的,加上会触发函数重新渲染, 如果代码长这样 一秒再修改,然后重新触发setTImeout, 然后再触发,重复触发循环 如果这样呢 还是会,因为你执行又会重新渲染 2.异步修改数据 为什么修改多次还是跟不上呢? 函数传参解决 因为是异步修改 ,所以…...
蓝桥杯【第15届省赛】Python B组
这题目难度对比历届是相当炸裂的简单了…… A:穿越时空之门 【问题描述】 随着 2024 年的钟声回荡,传说中的时空之门再次敞开。这扇门是一条神秘的通道,它连接着二进制和四进制两个不同的数码领域,等待着勇者们的探索。 在二进制…...
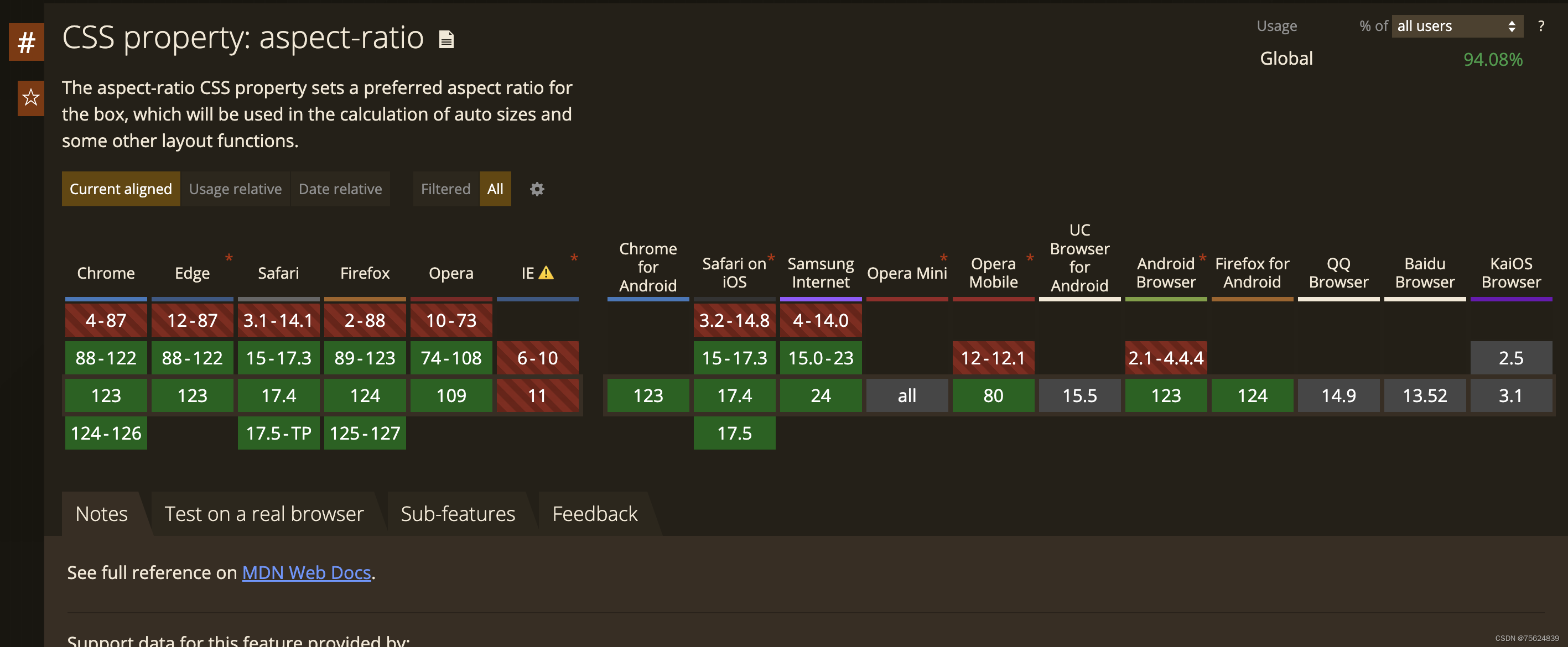
CSS aspect-ratio属性设置元素宽高比
aspect-ratio 是CSS的一个属性,用于设置元素的期望宽高比。它设置确保元素保持特定的比例,不受其内容或容器大小的影响。 语法: aspect-ratio: <ratio>;其中 <ratio> 是一个由斜杠(/)分隔的两个数字&…...

Jones矩阵符号运算
文章目录 Jones向量Jones矩阵 有关Jones矩阵、Jones向量的基本原理,可参考这个: 通过Python理解Jones矩阵,本文主要介绍sympy中提供的有关偏振光学的符号计算工具 Jones向量 Jones向量是描述光线偏振状态的重要工具,例如一个偏振…...
解决 App 自动化测试的常见痛点!
App 自动化测试中有些常见痛点问题,如果框架不能很好的处理,就可能出现元素定位超时找不到的情况,自动化也就被打断终止了。很容易打消做自动化的热情,导致从入门到放弃。比如下面的两个问题: 一是 App 启动加载时间较…...

2016NOIP普及组真题 1. 买铅笔
线上OJ: 一本通:http://ybt.ssoier.cn:8088/problem_show.php?pid1973 核心思想: 向上取整的代码 (m (n-1))/n 。(本题考点与2023年J组的第一和第二题一样) 比如需要买31支笔,每包30支,则需要…...
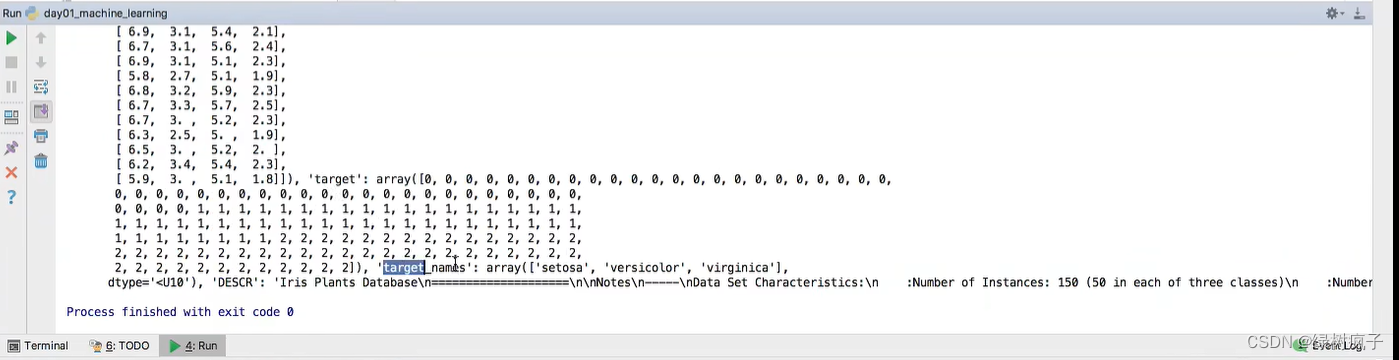
机器学习—数据集(二)
1可用数据集 公司内部 eg:百度 数据接口 花钱 数据集 学习阶段可用的数据集: sklearn:数据量小,方便学习kaggle:80万科学数据,真实数据,数据量大UCI:收录了360个数据集,覆盖科学、生活、经济等…...

华为S5735S核心交换配置实例
以下脚本实现创建vlan2,3,IP划分,DHCP启用,接口划分,ssh,telnet,http,远程登录启用 默认用户创建admin/admin123提示首次登录需要更改用户密码S5735产品手册更多功能配置,移步官网参考手册配置 system-viewsysname t…...

19c补丁后oracle属主变化,导致不能识别磁盘组
补丁后服务器重启,数据库再次无法启动 ORA01017: invalid username/password; logon denied Oracle 19c 在打上 19.23 或以上补丁版本后,存在与用户组权限相关的问题。具体表现为,Oracle 实例的运行用户(oracle)和集…...
微信小程序之bind和catch
这两个呢,都是绑定事件用的,具体使用有些小区别。 官方文档: 事件冒泡处理不同 bind:绑定的事件会向上冒泡,即触发当前组件的事件后,还会继续触发父组件的相同事件。例如,有一个子视图绑定了b…...
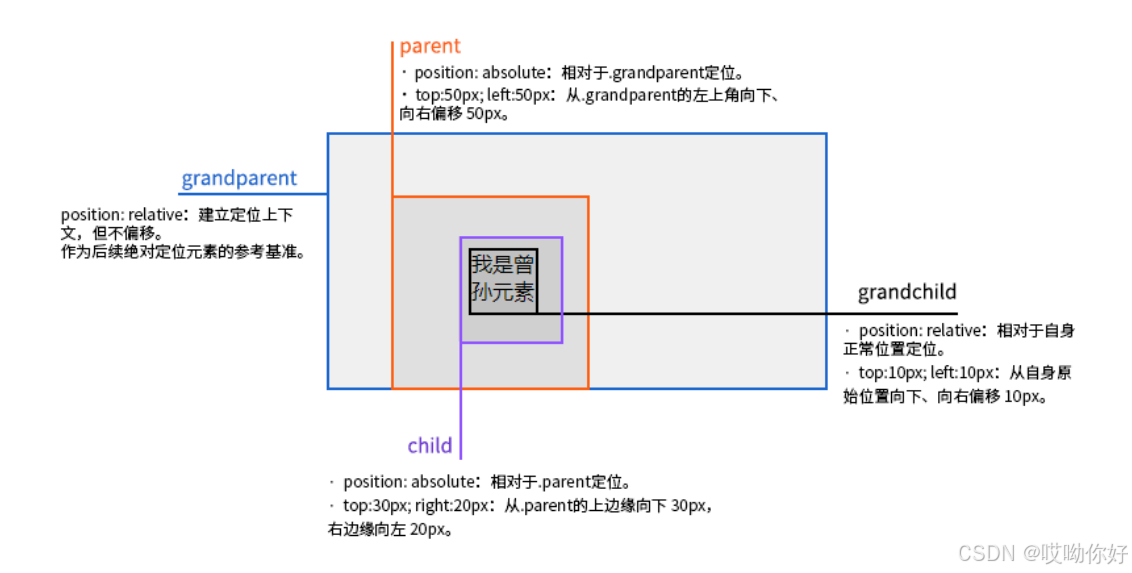
【CSS position 属性】static、relative、fixed、absolute 、sticky详细介绍,多层嵌套定位示例
文章目录 ★ position 的五种类型及基本用法 ★ 一、position 属性概述 二、position 的五种类型详解(初学者版) 1. static(默认值) 2. relative(相对定位) 3. absolute(绝对定位) 4. fixed(固定定位) 5. sticky(粘性定位) 三、定位元素的层级关系(z-i…...
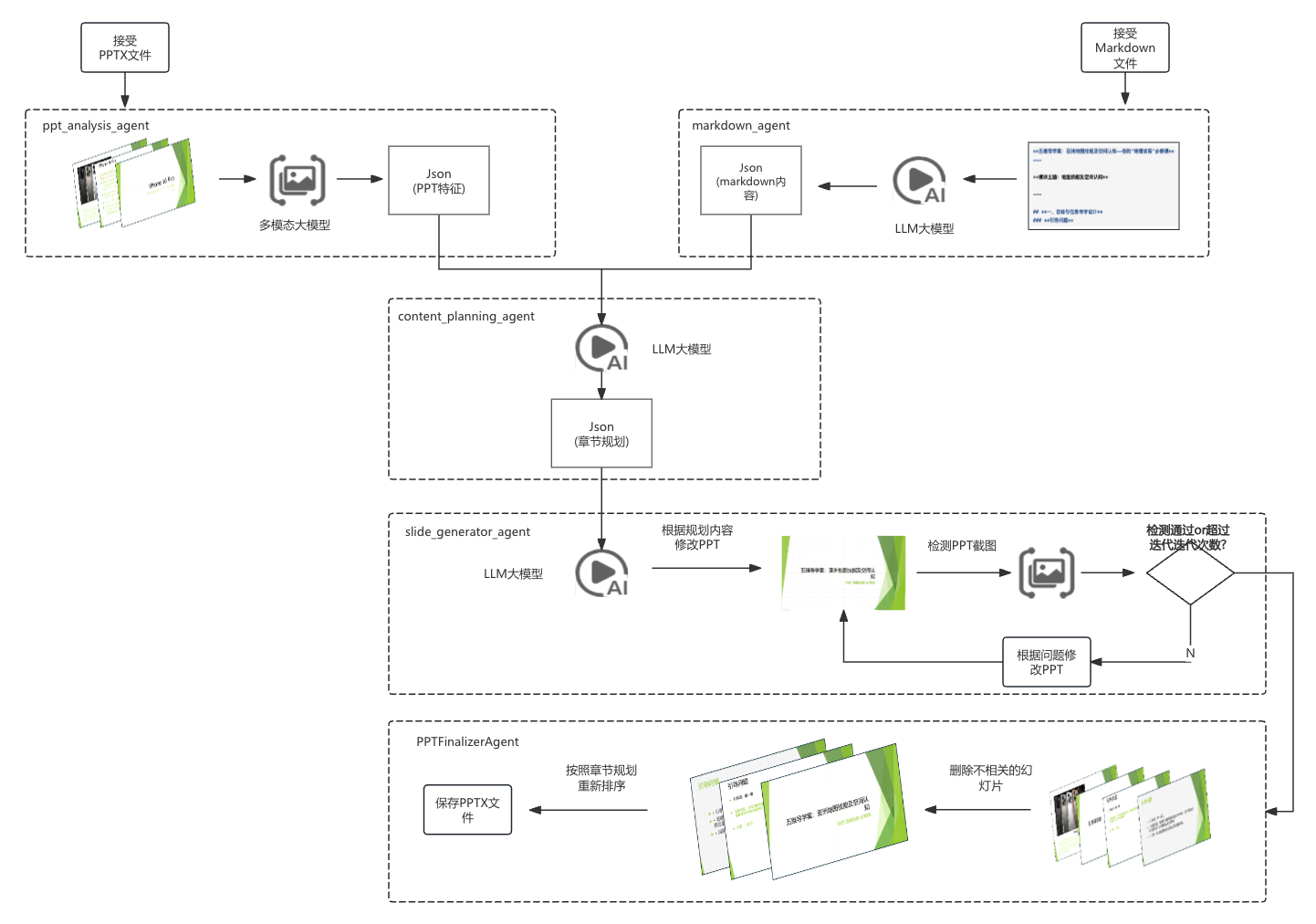
【项目实战】通过多模态+LangGraph实现PPT生成助手
PPT自动生成系统 基于LangGraph的PPT自动生成系统,可以将Markdown文档自动转换为PPT演示文稿。 功能特点 Markdown解析:自动解析Markdown文档结构PPT模板分析:分析PPT模板的布局和风格智能布局决策:匹配内容与合适的PPT布局自动…...

Robots.txt 文件
什么是robots.txt? robots.txt 是一个位于网站根目录下的文本文件(如:https://example.com/robots.txt),它用于指导网络爬虫(如搜索引擎的蜘蛛程序)如何抓取该网站的内容。这个文件遵循 Robots…...
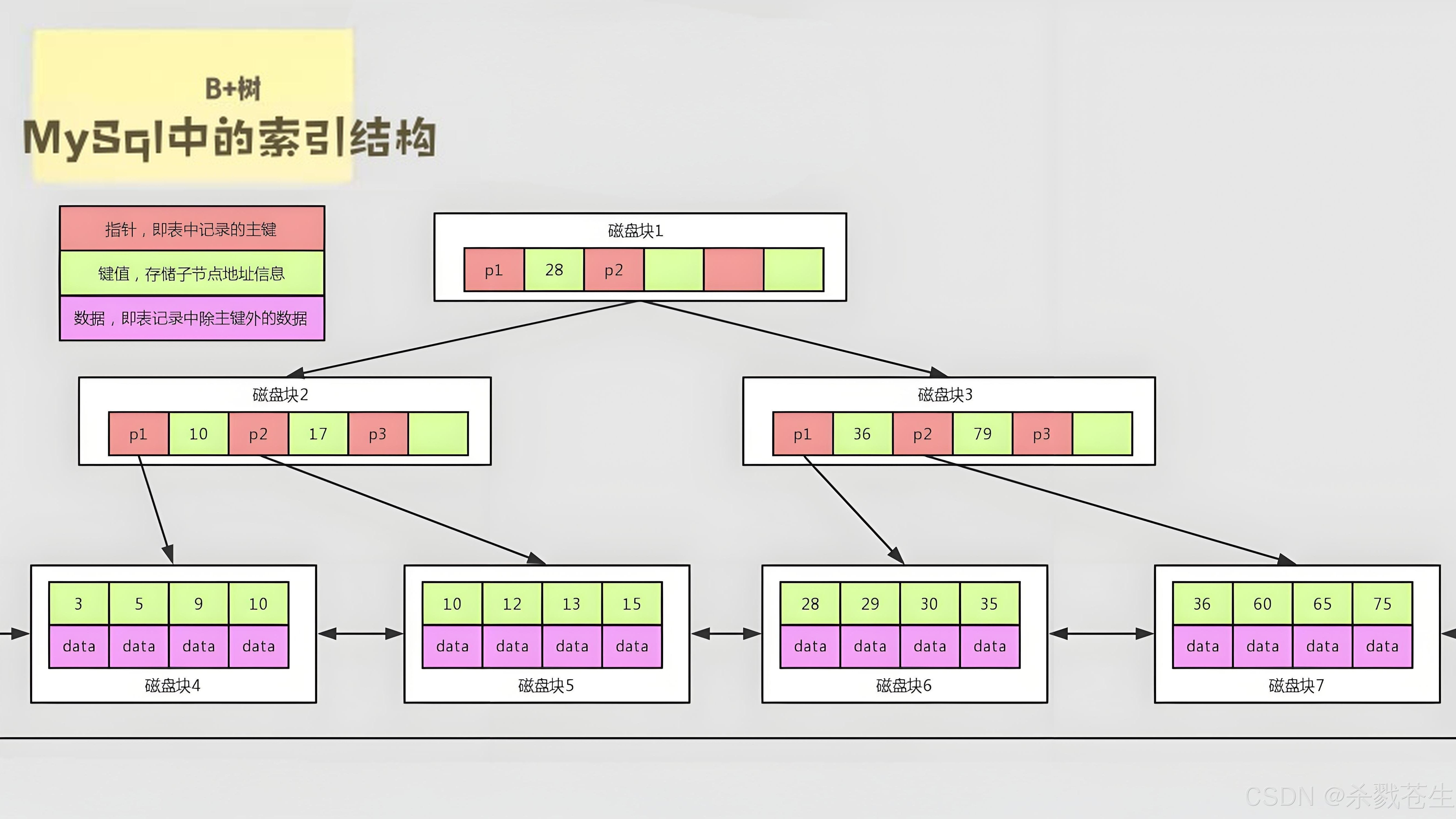
ElasticSearch搜索引擎之倒排索引及其底层算法
文章目录 一、搜索引擎1、什么是搜索引擎?2、搜索引擎的分类3、常用的搜索引擎4、搜索引擎的特点二、倒排索引1、简介2、为什么倒排索引不用B+树1.创建时间长,文件大。2.其次,树深,IO次数可怕。3.索引可能会失效。4.精准度差。三. 倒排索引四、算法1、Term Index的算法2、 …...

Caliper 配置文件解析:config.yaml
Caliper 是一个区块链性能基准测试工具,用于评估不同区块链平台的性能。下面我将详细解释你提供的 fisco-bcos.json 文件结构,并说明它与 config.yaml 文件的关系。 fisco-bcos.json 文件解析 这个文件是针对 FISCO-BCOS 区块链网络的 Caliper 配置文件,主要包含以下几个部…...

rnn判断string中第一次出现a的下标
# coding:utf8 import torch import torch.nn as nn import numpy as np import random import json""" 基于pytorch的网络编写 实现一个RNN网络完成多分类任务 判断字符 a 第一次出现在字符串中的位置 """class TorchModel(nn.Module):def __in…...
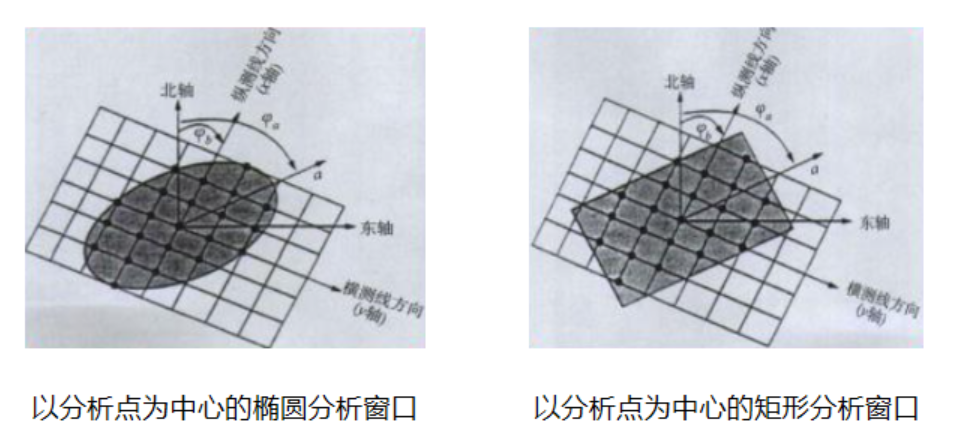
论文笔记——相干体技术在裂缝预测中的应用研究
目录 相关地震知识补充地震数据的认识地震几何属性 相干体算法定义基本原理第一代相干体技术:基于互相关的相干体技术(Correlation)第二代相干体技术:基于相似的相干体技术(Semblance)基于多道相似的相干体…...
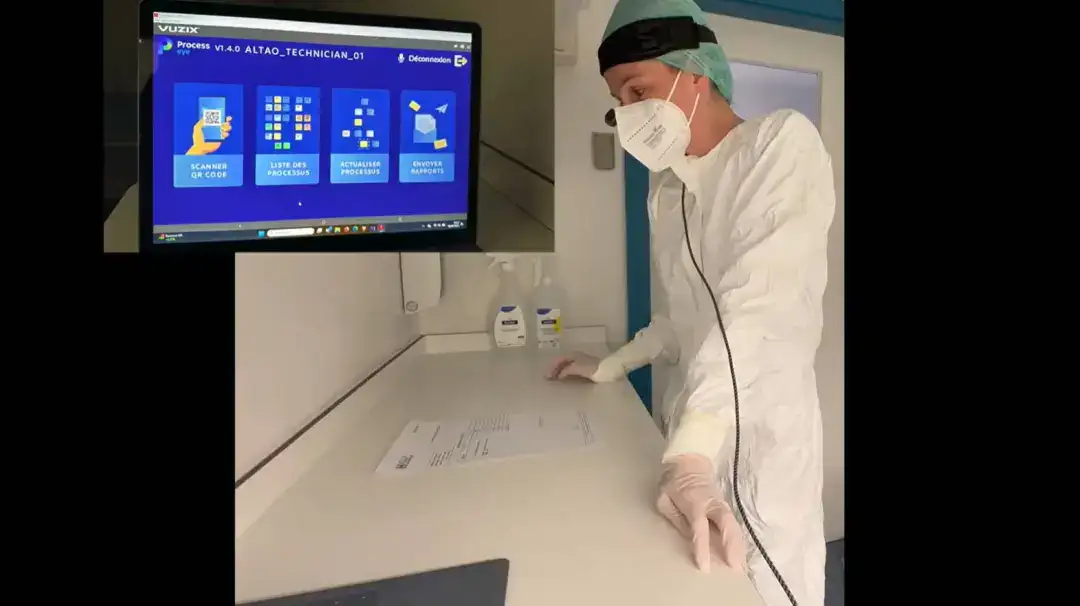
安宝特案例丨Vuzix AR智能眼镜集成专业软件,助力卢森堡医院药房转型,赢得辉瑞创新奖
在Vuzix M400 AR智能眼镜的助力下,卢森堡罗伯特舒曼医院(the Robert Schuman Hospitals, HRS)凭借在无菌制剂生产流程中引入增强现实技术(AR)创新项目,荣获了2024年6月7日由卢森堡医院药剂师协会࿰…...