STM32之FreeRTOS移植
1.FreeRTOS的移植过程是将系统需要的文件和代码进行移植和裁剪,其移植的主要过程为:
(1)官网上下载FreeRTOS源码:https://www.freertos.org/
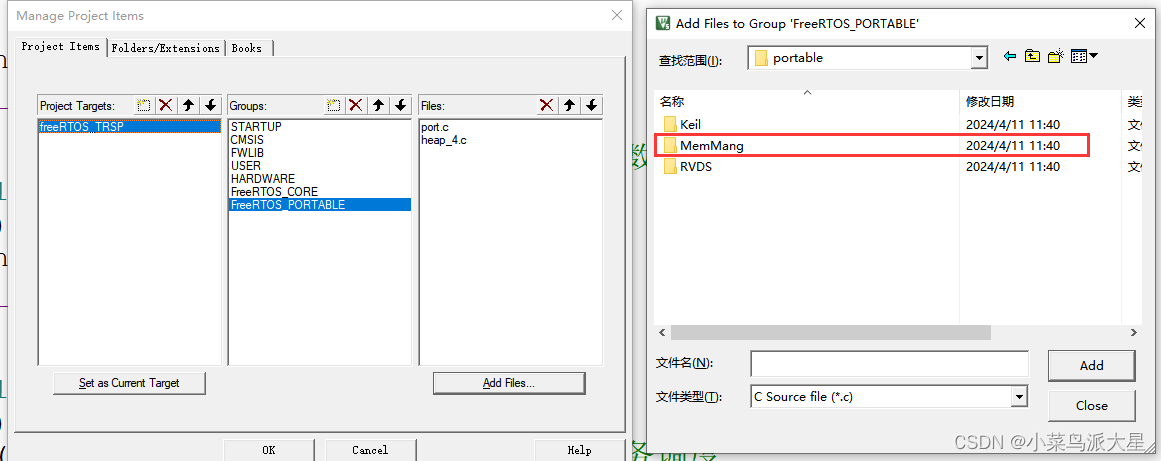
(2)移植文件夹,在portable文件夹中只需要保留:Keil、MemMang、RVDS。
(3)代码中的裁剪,修改相关的宏定义。
2.移植文件夹:
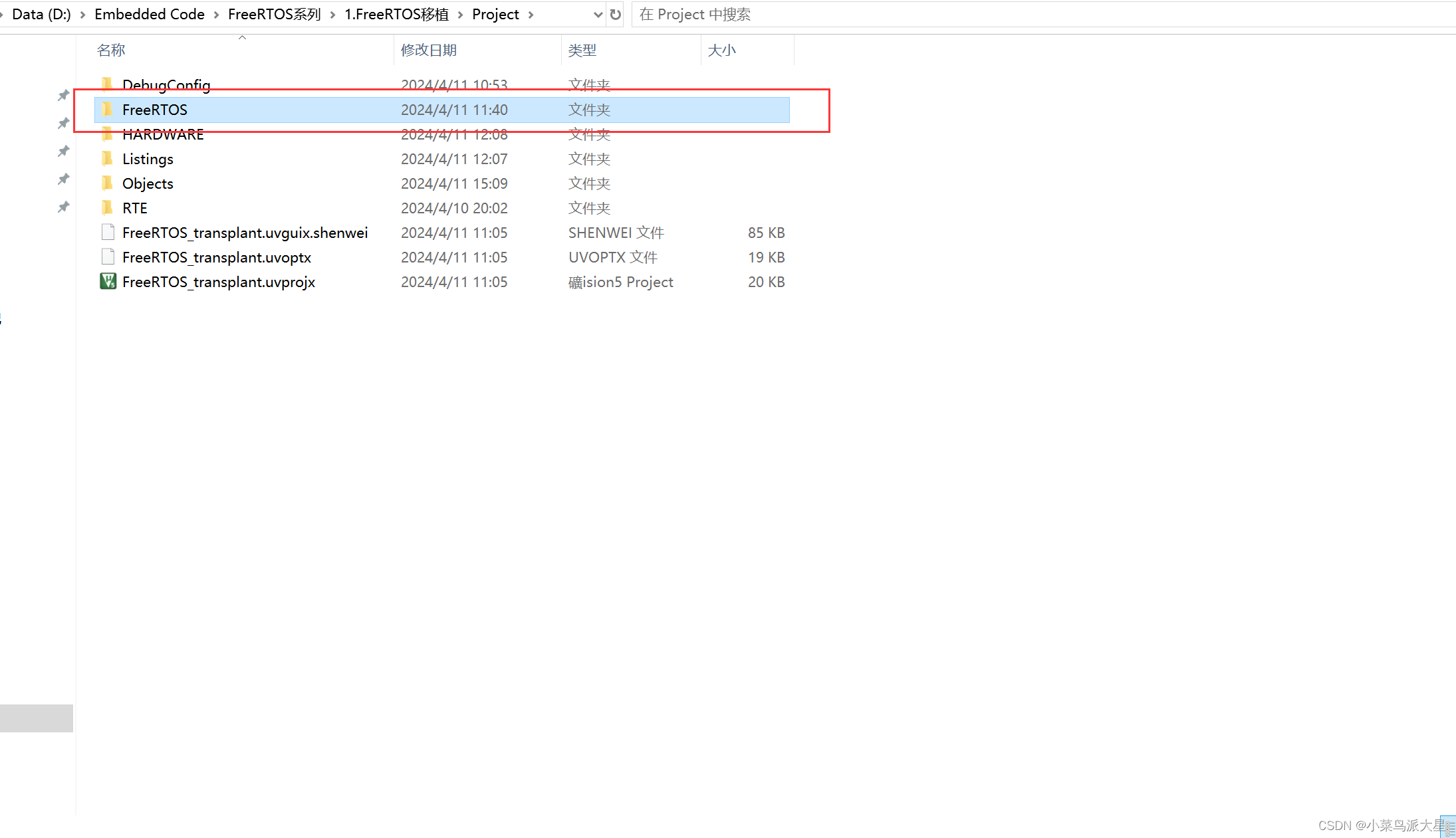
(1)首先在Keil的基本工程模板中创建一个文件夹FreeRTOS,用来存放FreeRTOS的源码:
(2)将如下三个文件夹导入到FreeRTOS目录下:
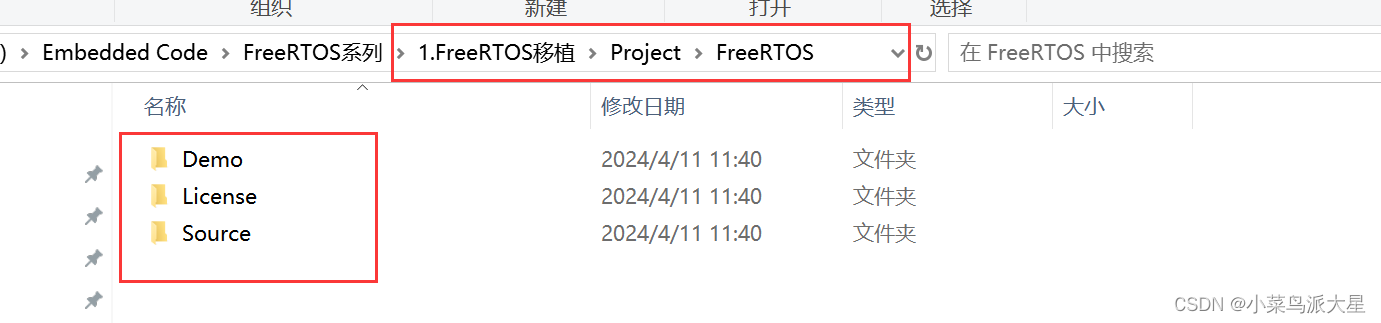
其中,Demo中存放的参考例程。License中是相关的许可信息。Source中便是FreeRTOS的源码。
(3)裁剪Source中的文件:
Source中的文件信息如下
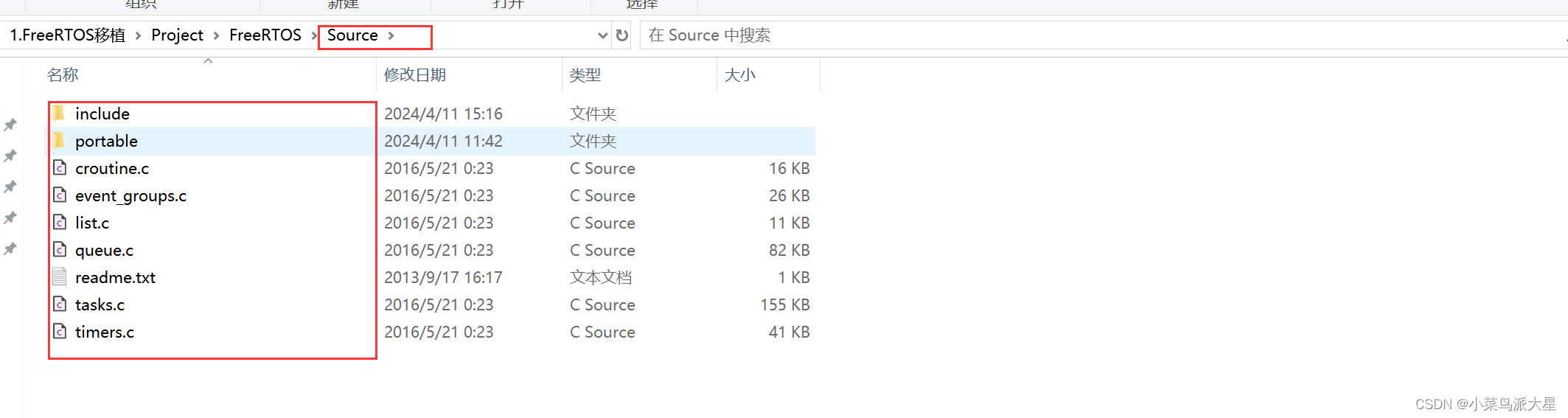
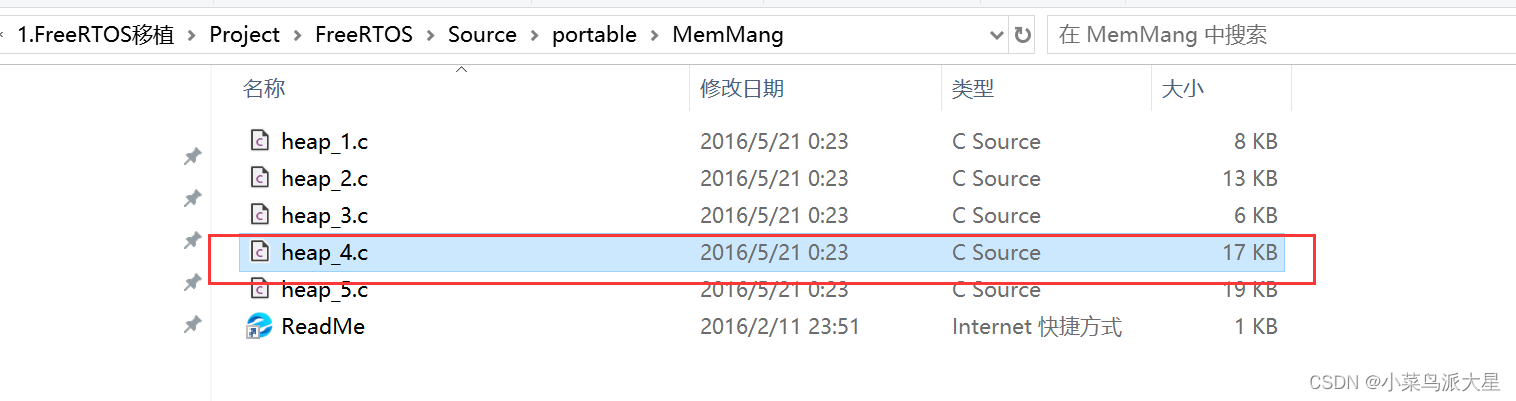
portable中存放是FreeRTOS和硬件之间的接口桥梁,在portable中只需要保留如下三个文件夹即可。
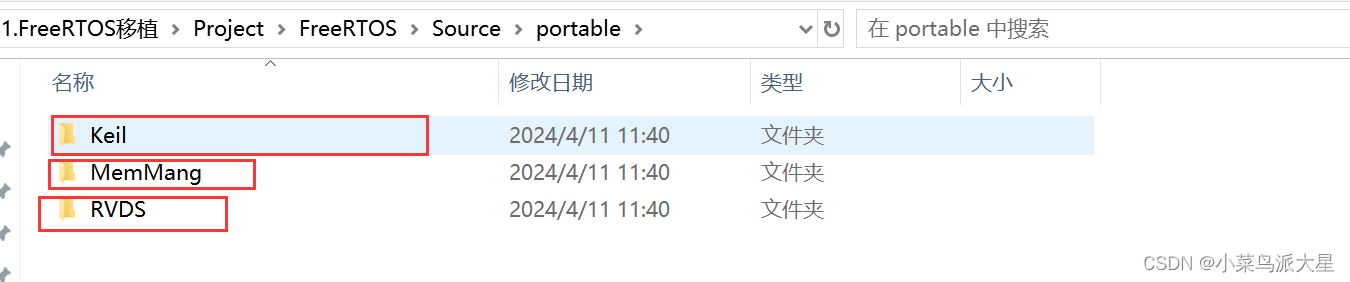
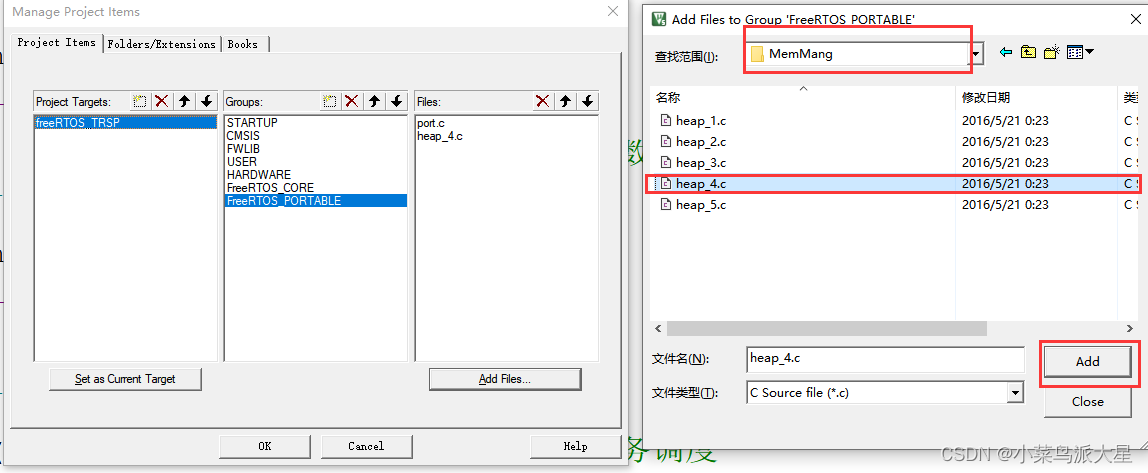
MemMang中存放是内存管理相关的算法文件,本文选择heap_c.c。
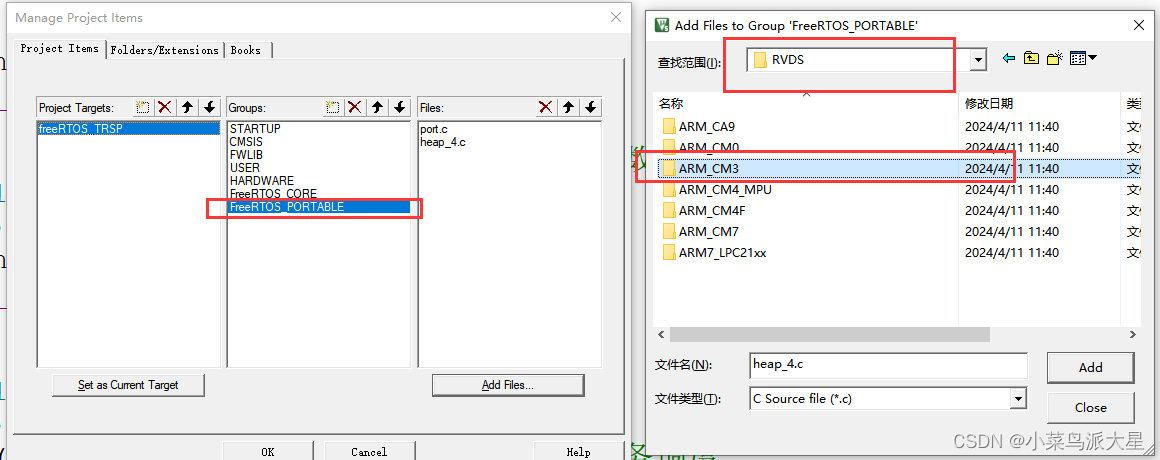
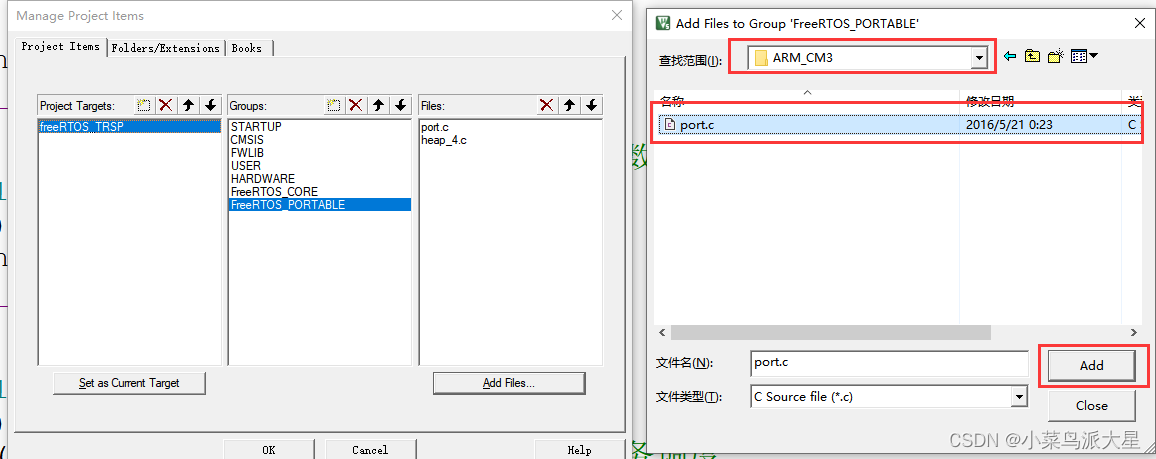
RVDS和Keil中存放是软件和硬件之间的接口文件。本文的STM32是Coretex-M3系列,所以需要选择ARM_CM3。


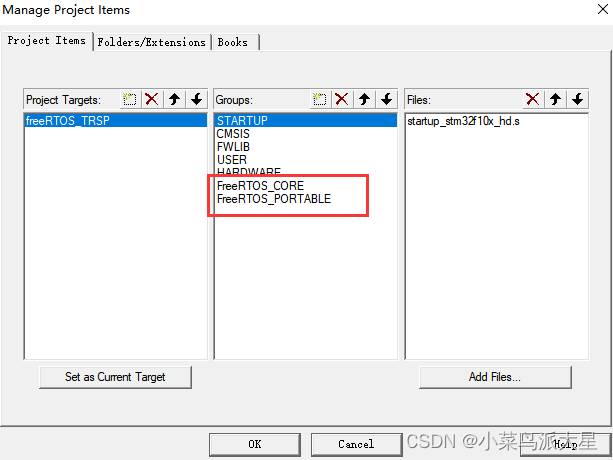
3.创建工程文件:
在基础工程文件中创建两个如下两个文件夹用来存放FreeRTOS相关的文件:
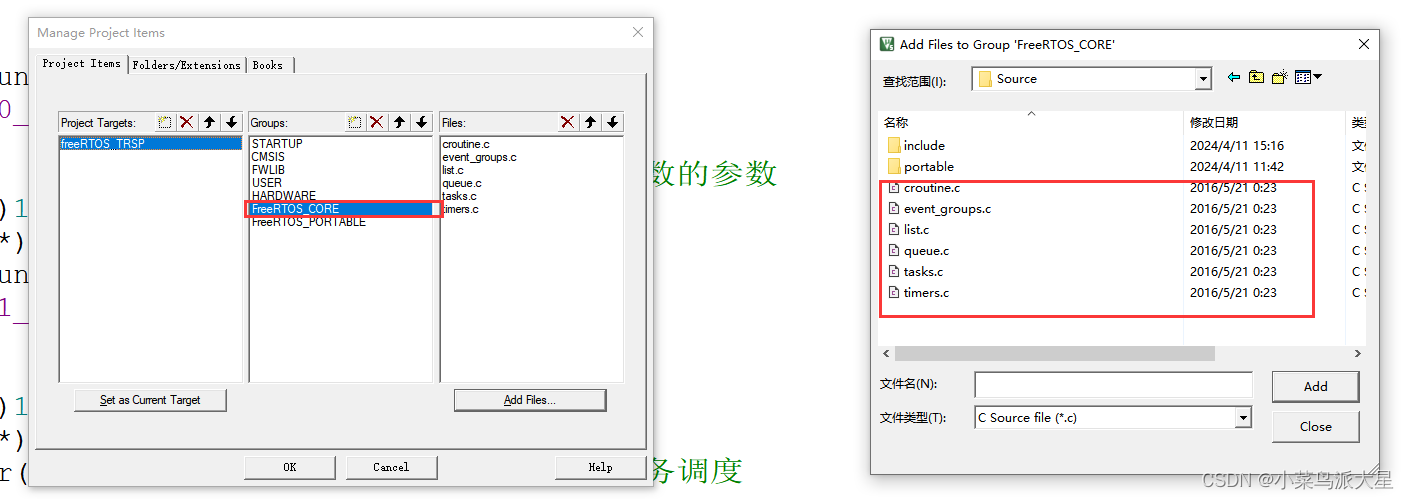
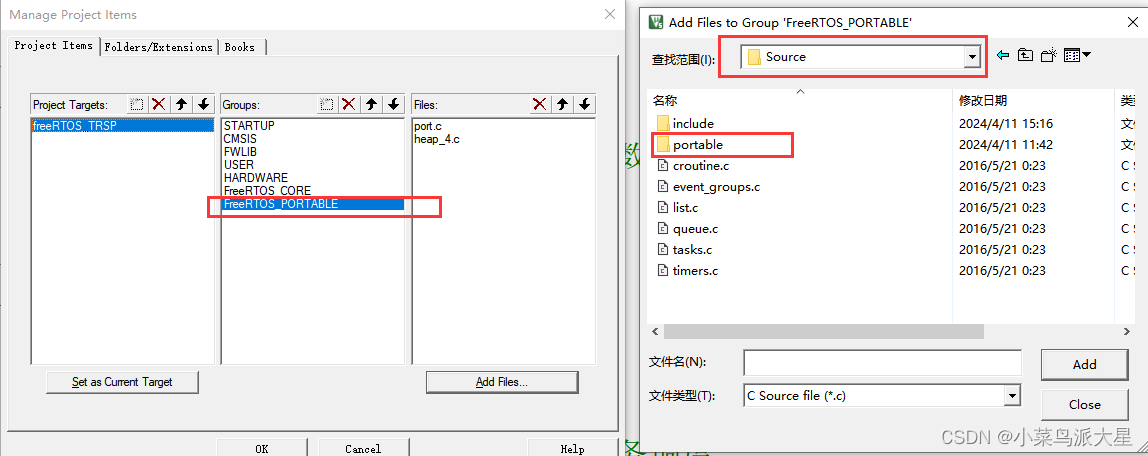
添加文件:
4.导入头文件的路径:
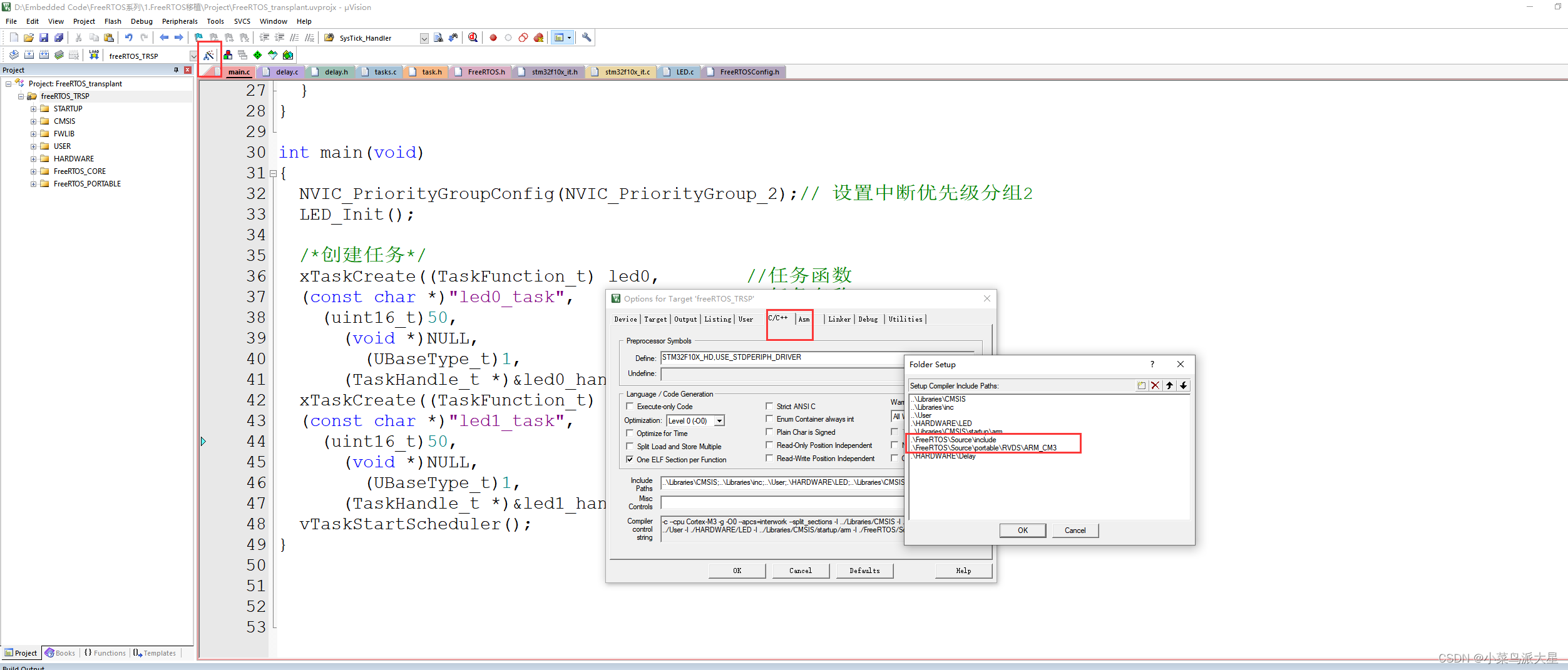
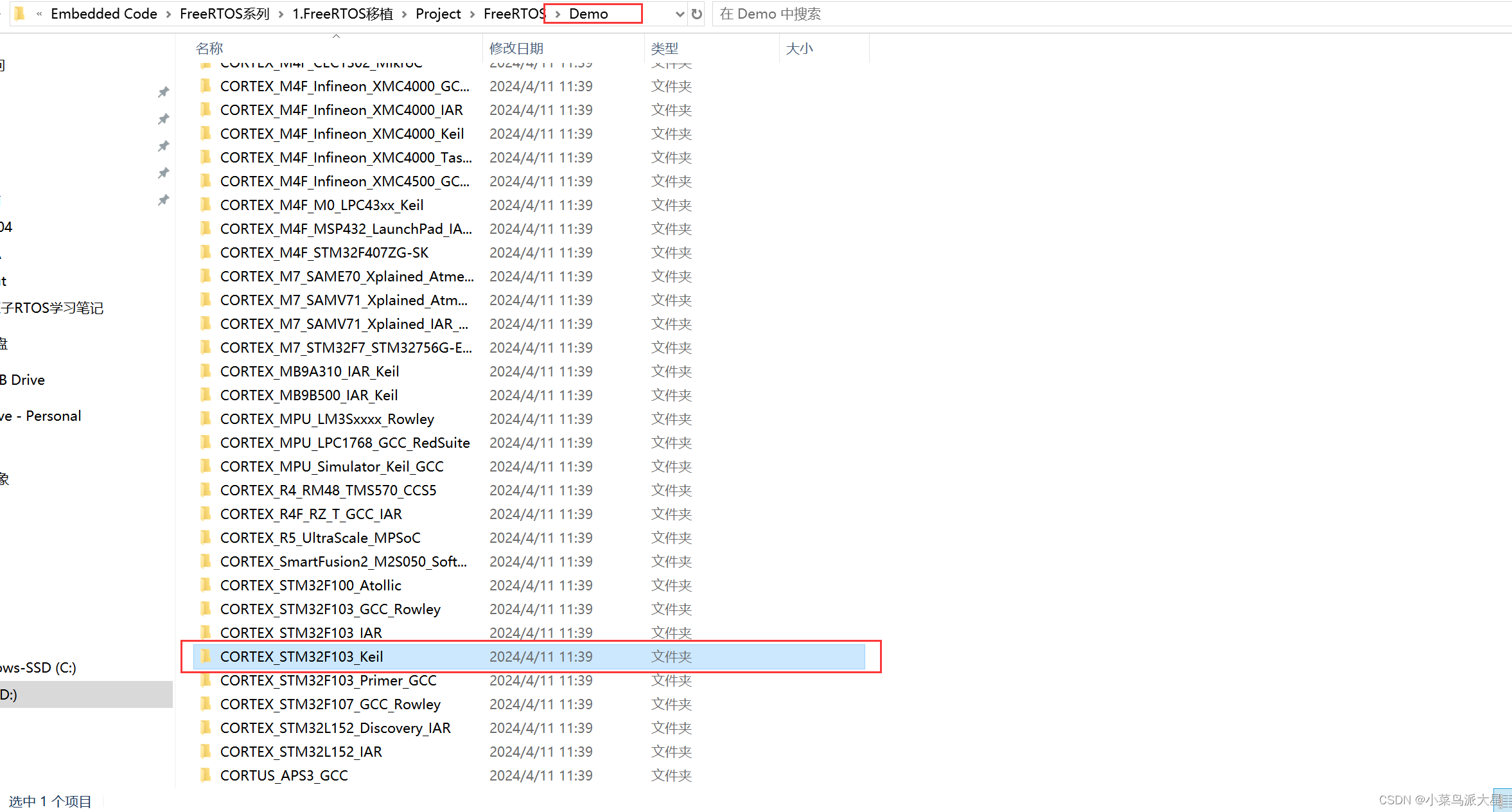
5.移植FreeRTOSConfig.h文件:
FreeRTOSConfig.h是FreeRTOS的配置文件,通常FreeRTOS的裁剪都是通过修改此文件中的宏定义来实现。选择芯片序号和开发环境对应的文件:
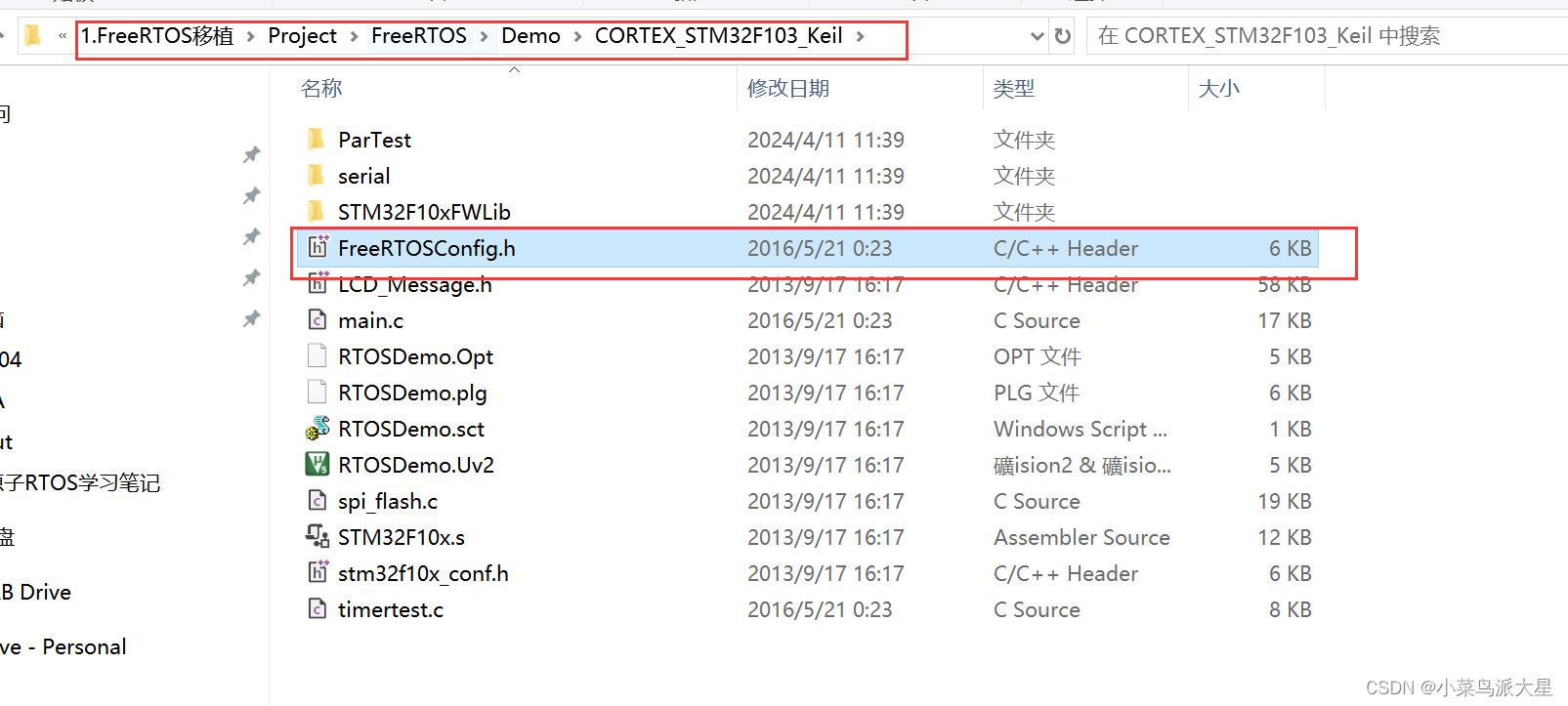
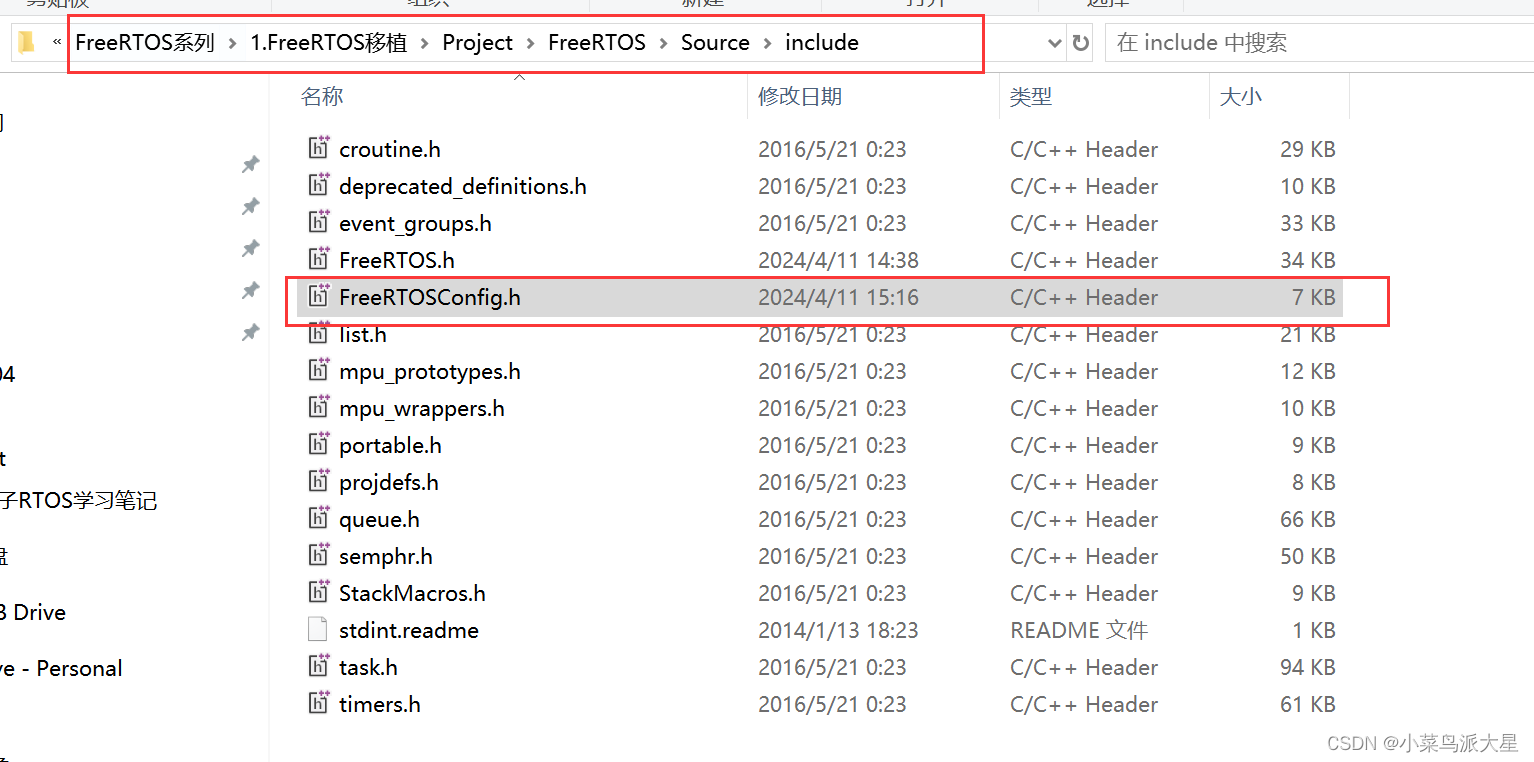
将FreeRTOSConfig.h复制到自己的工程文件下,本文将FreeRTOSConfig.h放在include文件夹下:
6.代码裁剪:
(1)添加宏定义,将STM32的PendSV_Handler、SVC_Handler、SysTick_Handler映射到FreeRTOS中。在FreeRTOS中添加如下三个宏定义:

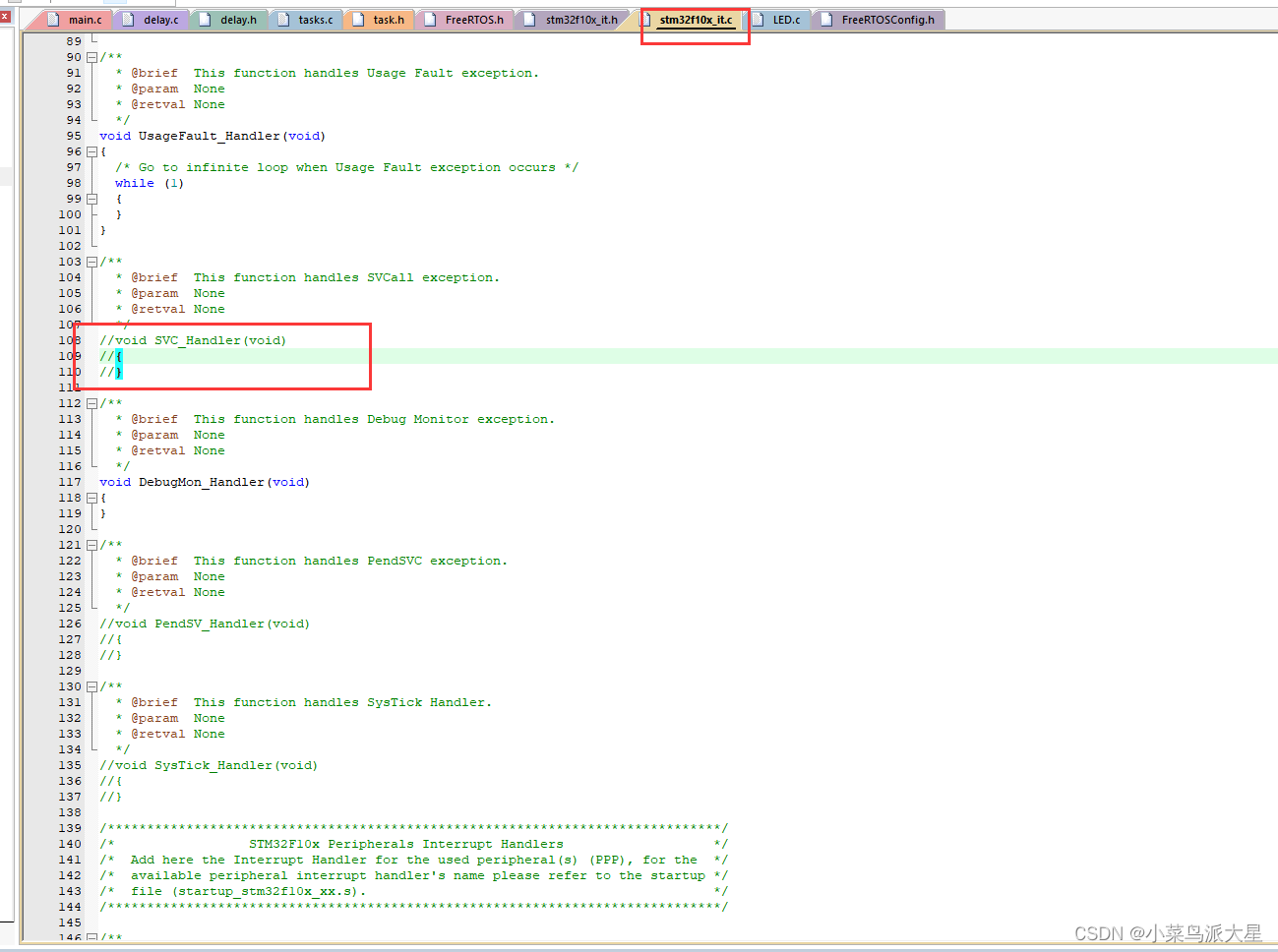
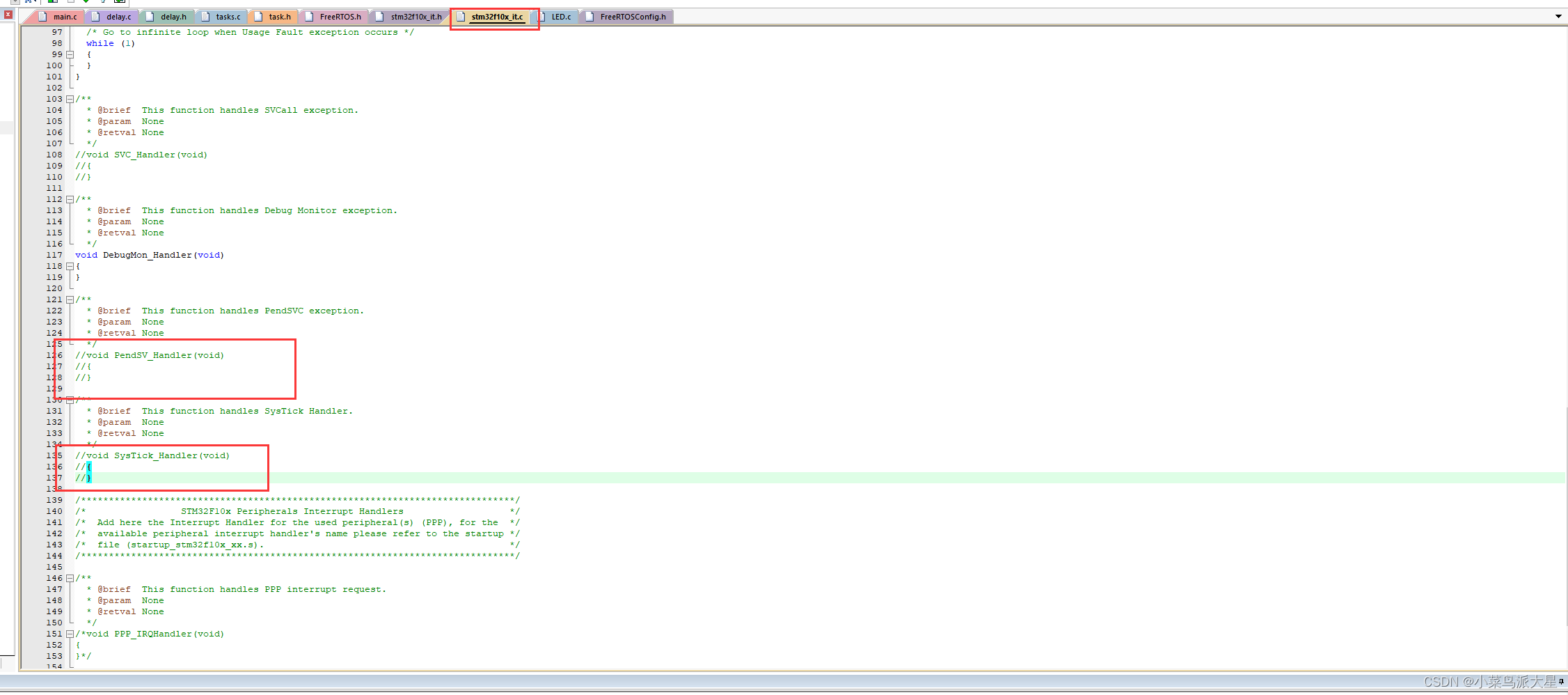
(2)注释stm32f10x_it.c中的SysTick_Handler()、SVC_Handler()和 PendSV_Handler()三个中断服务函数。因为在FreeRTOS中已经重新定义了这三个中断服务函数,所以此处需要注释,防止重复定义。
7.创建任务:
(1)led.c
#include "led.h"void LED_Init(void)
{//¶¨Òå¶Ë¿ÚµÄ½á¹¹Ìå:GPIO_InitTypeDef GPIO_InitStruct;//1.ʹÄÜʱÖÓ£ºRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOA,ENABLE);//2.ÅäÖö˿ڽṹÌåµÄÏà¹ØÐÅÏ¢£º£¨LED1£©GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOD,&GPIO_InitStruct);//ÅäÖÃLED0£ºGPIO_InitStruct.GPIO_Pin = GPIO_Pin_8;GPIO_Init(GPIOA,&GPIO_InitStruct);//³õʼʱ½«LEDµÄ¶Ë¿Ú¶¼ÖÃΪ1£¬¼´Ï¨ÃðGPIO_SetBits(GPIOA,GPIO_Pin_8);GPIO_SetBits(GPIOD,GPIO_Pin_2);
}(2)main.c:
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "FreeRTOS.h"
#include "task.h"TaskHandle_t led0_handler;
TaskHandle_t led1_handler;void led0(void)
{while(1){GPIO_ResetBits(GPIOA,GPIO_Pin_8); //´ò¿ªLEDvTaskDelay(500);GPIO_SetBits(GPIOA,GPIO_Pin_8); //´ò¿ªLEDvTaskDelay(500);}
}void led1(void)
{while(1){GPIO_ResetBits(GPIOD,GPIO_Pin_2); //´ò¿ªLEDvTaskDelay(1000);GPIO_SetBits(GPIOD,GPIO_Pin_2); //´ò¿ªLEDvTaskDelay(1000);}
}int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// ÉèÖÃÖжÏÓÅÏȼ¶·Ö×é2LED_Init();/*´´½¨ÈÎÎñ*/xTaskCreate((TaskFunction_t) led0, //ÈÎÎñº¯Êý(const char *)"led0_task", //ÈÎÎñÃû³Æ(uint16_t)50, //ÈÎÎñ¶ÑÕ»´óС(void *)NULL, //´«µÝ¸øÈÎÎñº¯ÊýµÄ²ÎÊý(UBaseType_t)1, //ÈÎÎñÓÅÏȼ¶(TaskHandle_t *)&led0_handler); //ÈÎÎñ¾ä±úxTaskCreate((TaskFunction_t) led1,(const char *)"led1_task",(uint16_t)50,(void *)NULL,(UBaseType_t)1,(TaskHandle_t *)&led1_handler);vTaskStartScheduler(); //¿ªÊ¼ÈÎÎñµ÷¶È
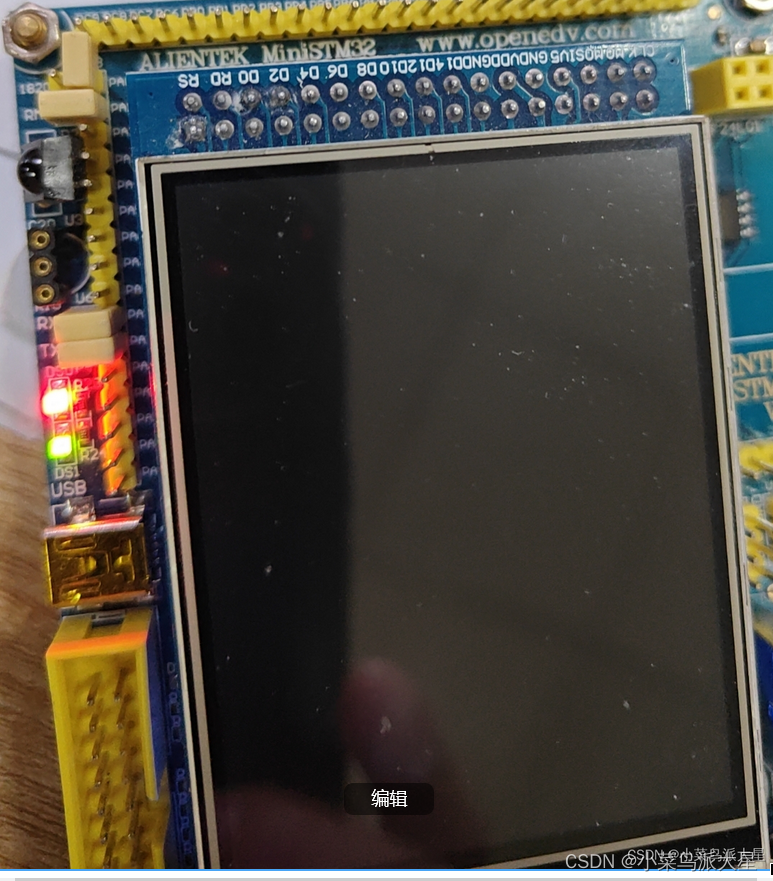
}8.运行结果:本文的运行结果是两个LED灯闪烁,其中led0每500ms闪烁一次,led1每1000ms闪烁一次。
9.总结:
FreeRTOS的移植过程主要是对相关的文件和代码进行裁剪。需要去了解每个文件夹中代码的大搞功能,才可以正确的移植文件。
此外,当使用xTaskGetSchedulerState()函数时,需要将FreeRTOS.h中的对应宏定义改为1:

相关文章:
STM32之FreeRTOS移植
1.FreeRTOS的移植过程是将系统需要的文件和代码进行移植和裁剪,其移植的主要过程为: (1)官网上下载FreeRTOS源码:https://www.freertos.org/ (2)移植文件夹,在portable文件夹中只需…...
-- 消息(Message)的简单认识)
SpringBoot实用开发(十四)-- 消息(Message)的简单认识
目录 1.消息的概念 2.Java处理消息的标准规范 3.JMS 4.AMQP 5.MQTT 1.消息的概念 广义角度来说,消息其实就是信息,但是和信息又有所不同。信息通常被定义为一组数据,而消息除了具有数据的特征之外,还有...
【Spring Boot 源码学习】SpringApplication 的 run 方法核心流程介绍
《Spring Boot 源码学习系列》 SpringApplication 的 run 方法核心流程介绍 一、引言二、往期内容三、主要内容3.1 run 方法源码初识3.2 引导上下文 BootstrapContext3.3 系统属性【java.awt.headless】3.4 早期启动阶段3.5 准备和配置应用环境3.6 打印 Banner 信息3.7 新建应用…...
如何保证消息不丢失?——使用rabbitmq的死信队列!
如何保证消息不丢失?——使用rabbitmq的死信队列! 1、什么是死信 在 RabbitMQ 中充当主角的就是消息,在不同场景下,消息会有不同地表现。 死信就是消息在特定场景下的一种表现形式,这些场景包括: 消息被拒绝访问&am…...

html、css、京东移动端静态页面,资源免费分享,可作为参考,提供InsCode在线运行演示
CSDN将我上传的免费资源私自变成VIP专享资源,且作为作者的我不可修改为免费资源,不可删除,寻找客服无果,很愤怒,(我发布免费资源就是希望大家能免费一起用、一起学习),接下来继续寻找…...
头歌-机器学习 第13次实验 特征工程——共享单车之租赁需求预估
第1关:数据探索与可视化 任务描述 本关任务:编写python代码,完成一天中不同时间段的平均租赁数量的可视化功能。 相关知识 为了完成本关任务,你需要掌握: 读取数据数据探索与可视化 读取数据 数据保存在./step1/…...
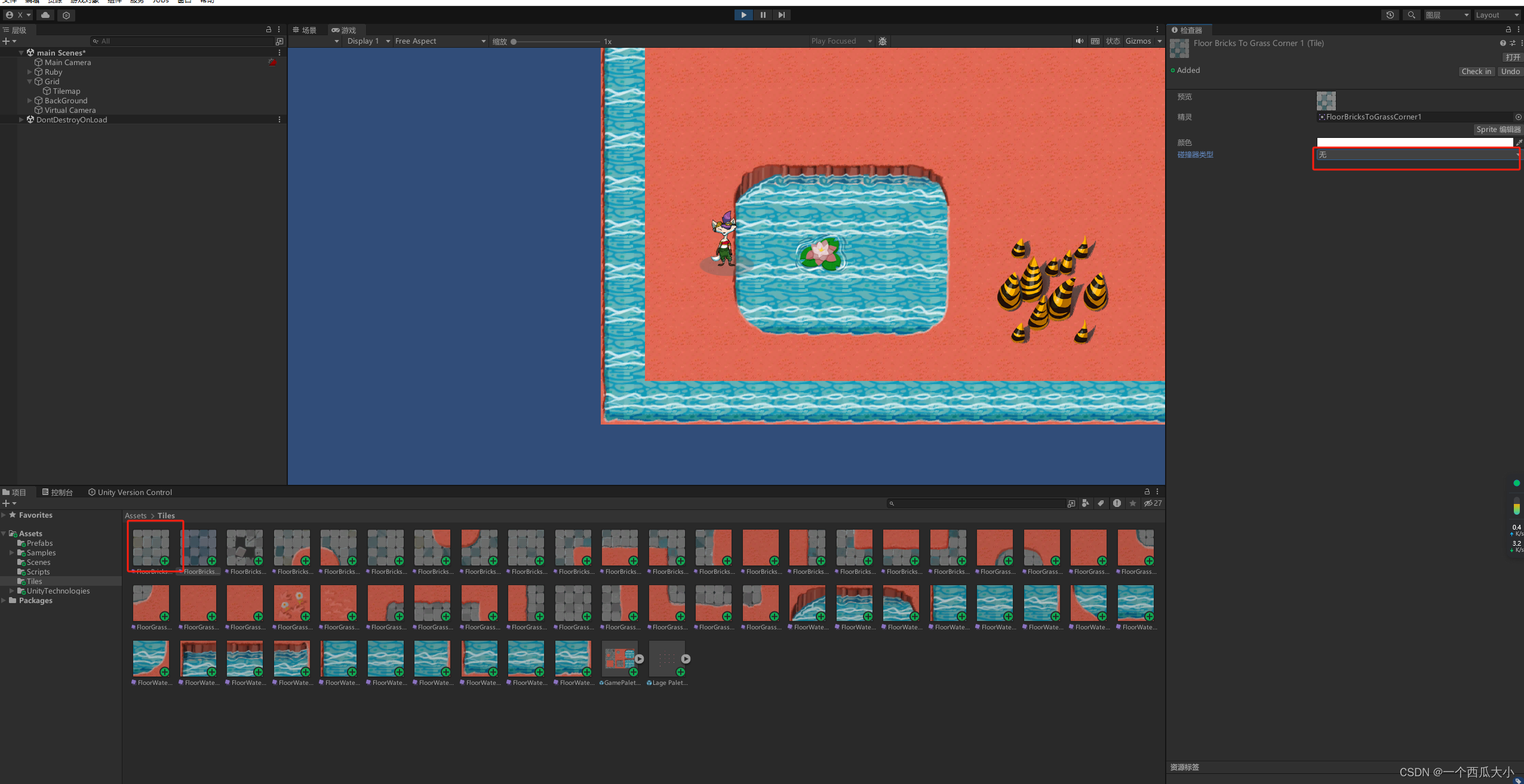
Unity 2D让相机跟随角色移动
相机跟随移动 最简单的方式通过插件Cinemachine 在窗口/包管理器选择全部找到Cinemachine,导入。然后在游戏对象/Cinemachine创建2D Camera。此时层级中创建一个2D相机。选中人物拖入检查器Follow。此时相机跟随人物移动。 修改相机视口距离 在检查器中Lens下调正…...
【面试题】s += 1 和 s = s + 1的区别
文章目录 1.问题2.发现过程3.解析 1.问题 以下两个程序真的完全等同吗? short s 0; s 1; short s 0; s s 1; 2.发现过程 初看s 1 和 s s 1好像是等价的,没有什么区别。很长一段时间内我也是这么觉得,因为当时学习c语言的时候教科书…...

ARM的学习
点亮流水灯 .text .global _start _start: 使能GPIOE的外设时钟 RCC_MP_AHB4ENSETR 0x50000a28 [4]->1LDR R0,0X50000A28 指定基地址LDR R1,[R0] 将寄存器数据读取出来保存到R1中ORR R1,R1,#(0x3<<4) [4]设置为1ORR R1,R1,#(0x3<<5) [5]设置为1STR …...
)
Restful API接口规范(以Django为例)
Restful API接口规范(以Django为例) Restful API的接口架构风格中制定了一些规范,极大的简化了前后端对接的时间,以及增加了开发效率 安全性保证–使用https路径中带 api标识路径中带版本号数据即资源,通常使用名词操作请求方式决定操作资源…...

AI助力,程序员压力倍增?
讲动人的故事,写懂人的代码 你知道程序员现在在AI辅助编程时最头疼的事情是什么吗?就是怎么在改代码的时候保住小命。 大家都听过程序员因为工作太累导致过劳湿的事情。 无论是写新功能、修bug,还是更改系统配置,都得改代码。 现在有了AI的帮助,本应该轻松很多,为什么…...

LoRA微调
论文:LoRA: Low-Rank Adaptation of Large Language Models 实现:microsoft/LoRA: Code for loralib, an implementation of “LoRA: Low-Rank Adaptation of Large Language Models” (github.com) 摘要 自然语言处理的一个重要的开发范式包括&#…...

45.基于SpringBoot + Vue实现的前后端分离-驾校预约学习系统(项目 + 论文)
项目介绍 本站是一个B/S模式系统,采用SpringBoot Vue框架,MYSQL数据库设计开发,充分保证系统的稳定性。系统具有界面清晰、操作简单,功能齐全的特点,使得基于SpringBoot Vue技术的驾校预约学习系统设计与实现管理工作…...
系统思考—时间滞延
“没有足够的时间是所有管理问题的一部分。”——彼得德鲁克 鱼和熊掌可以兼得,但并不能同时获得。在提出系统解决方案时,我们必须认识到并考虑到解决方案的实施通常会有必要的时间滞延。这种延迟有时比我们预想的要长得多,特别是当方案涉及…...

SSM项目转Springboot项目
SSM项目转Springboot项目 由于几年前写的一个ssm项目想转成springboot项目,所以今天倒腾了一下。 最近有人需要毕业设计转换一下,所以我有时间的话可以有偿帮忙转换,需要的私信我或+v:Arousala_ 首先创建一个新的spr…...

VUE3.0对比VUE2.0
vue3.0 与 vue2.0的不同之处有以下几点: 数据响应式原理 3.0基于Proxy的代理实现监测,vue2.0是基于Object.defineProperty实现监测。 vue2.0 通过Object.defineProperty,每个数据属性被定义成可观察的,具有getter和setter方法&…...
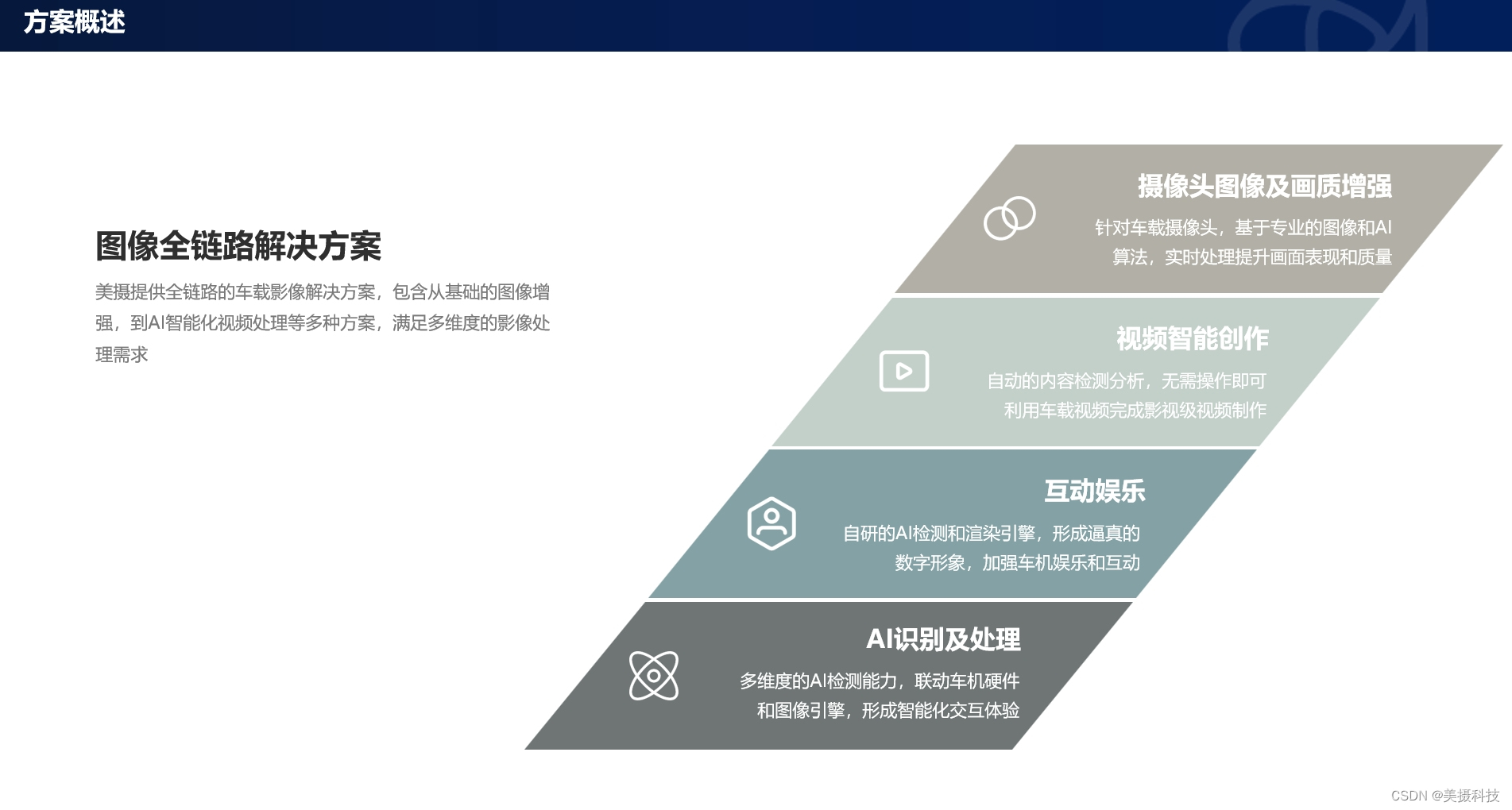
车内AR互动娱乐解决方案,打造沉浸式智能座舱体验
美摄科技凭借其卓越的创新能力,为企业带来了革命性的车内AR互动娱乐解决方案。该方案凭借自研的AI检测和渲染引擎,打造出逼真的数字形象,不仅丰富了车机娱乐内容,更提升了乘客与车辆的互动体验,让每一次出行都成为一场…...
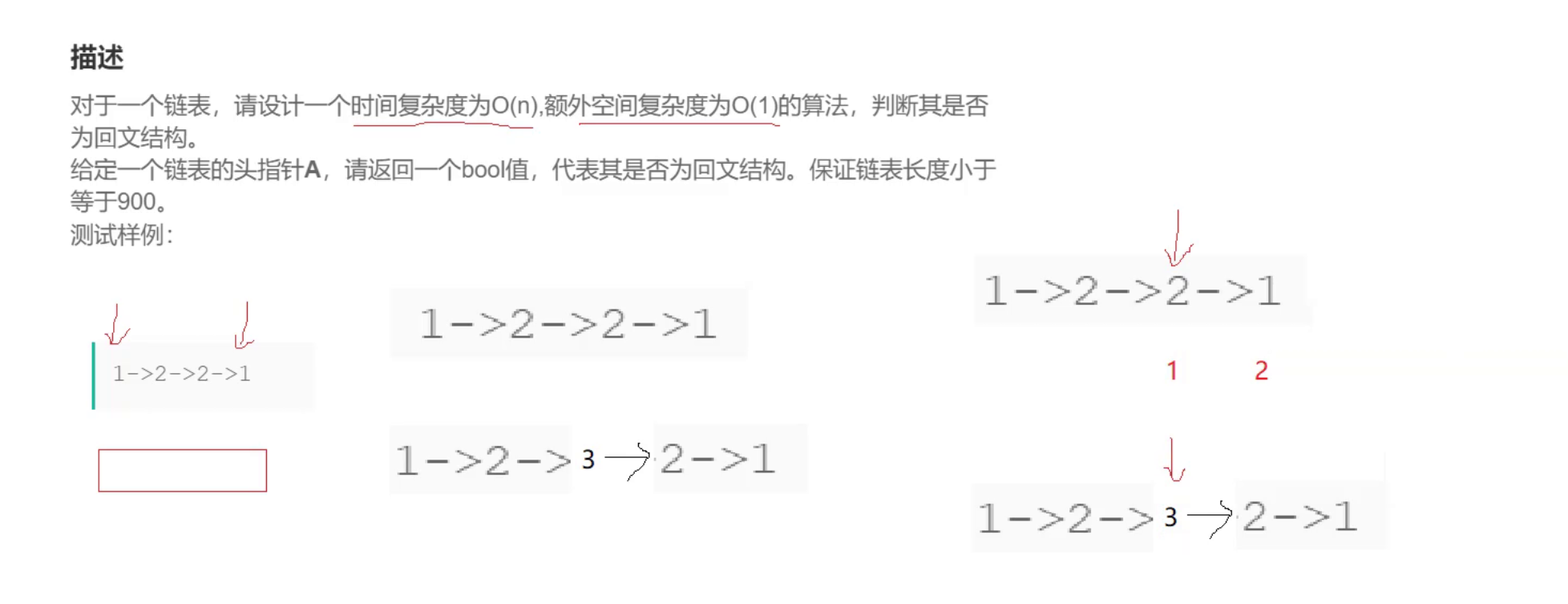
OR36 链表的回文结构
描述 对于一个链表,请设计一个时间复杂度为O(n),额外空间复杂度为O(1)的算法,判断其是否为回文结构。 给定一个链表的头指针A,请返回一个bool值,代表其是否为回文结构。保证链表长度小于等于900。 测试样例: 1->…...

【译】微调与人工引导: 语言模型调整中的 SFT 和 RLHF
原文地址:Fine-Tuning vs. Human Guidance: SFT and RLHF in Language Model Tuning 本文主要对监督微调(SFT, Supervised Fine Tuning )和人类反馈强化学习(RLHF, Reinforcement Learning from Human Feedback)进行简…...
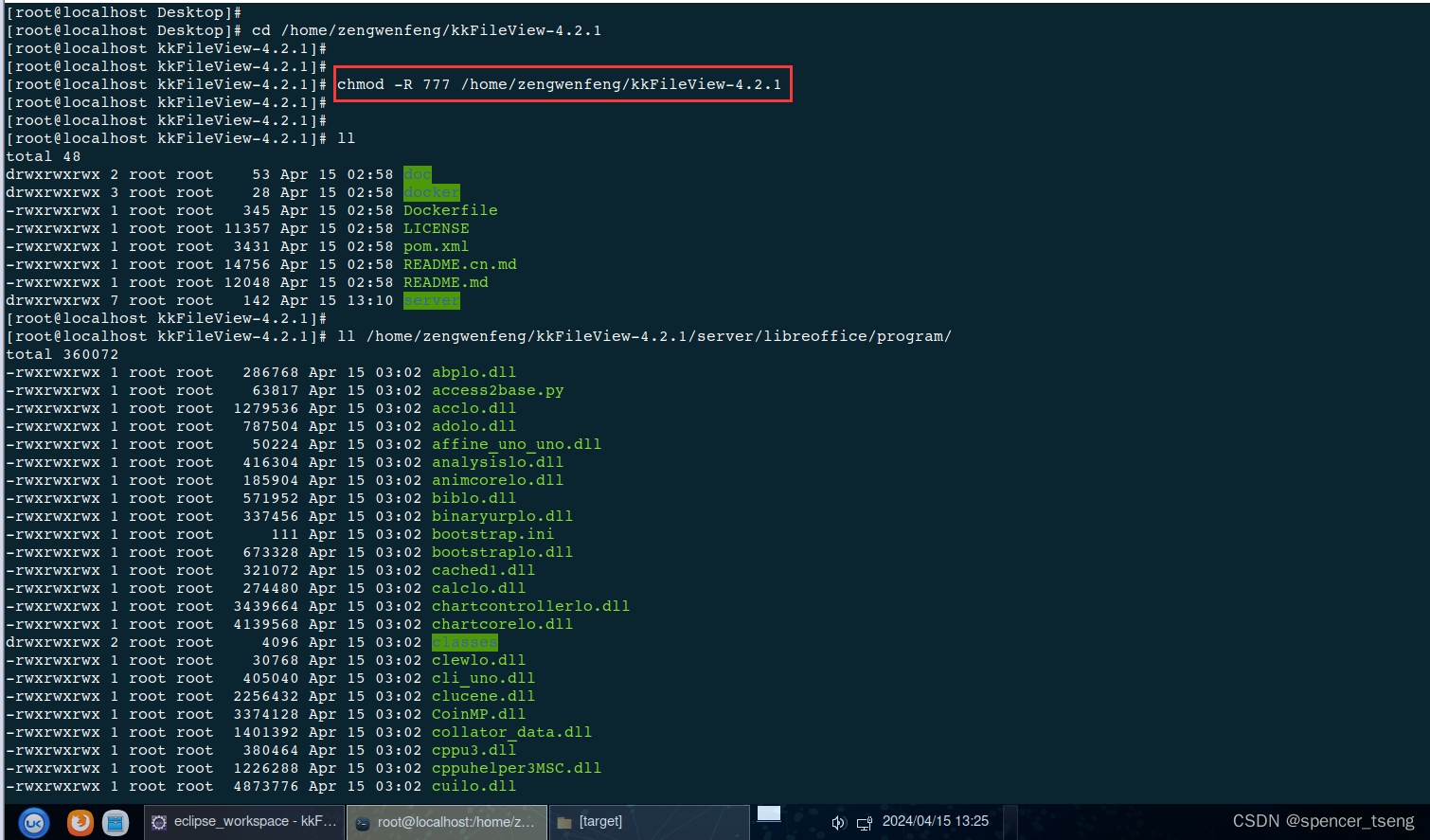
kylin java.io.IOException: error=13, Permission denied
linux centos7.8 error13, Permission denied_linux open error13-CSDN博客 chmod -R 777 /home/zengwenfeng/kkFileView-4.2.1 2024-04-15 13:15:17.416 WARN 3400 --- [er-offprocmng-1] o.j.l.office.LocalOfficeProcessManager : An I/O error prevents us to determine…...

在软件开发中正确使用MySQL日期时间类型的深度解析
在日常软件开发场景中,时间信息的存储是底层且核心的需求。从金融交易的精确记账时间、用户操作的行为日志,到供应链系统的物流节点时间戳,时间数据的准确性直接决定业务逻辑的可靠性。MySQL作为主流关系型数据库,其日期时间类型的…...
RocketMQ延迟消息机制
两种延迟消息 RocketMQ中提供了两种延迟消息机制 指定固定的延迟级别 通过在Message中设定一个MessageDelayLevel参数,对应18个预设的延迟级别指定时间点的延迟级别 通过在Message中设定一个DeliverTimeMS指定一个Long类型表示的具体时间点。到了时间点后…...
linux arm系统烧录
1、打开瑞芯微程序 2、按住linux arm 的 recover按键 插入电源 3、当瑞芯微检测到有设备 4、松开recover按键 5、选择升级固件 6、点击固件选择本地刷机的linux arm 镜像 7、点击升级 (忘了有没有这步了 估计有) 刷机程序 和 镜像 就不提供了。要刷的时…...

Qwen3-Embedding-0.6B深度解析:多语言语义检索的轻量级利器
第一章 引言:语义表示的新时代挑战与Qwen3的破局之路 1.1 文本嵌入的核心价值与技术演进 在人工智能领域,文本嵌入技术如同连接自然语言与机器理解的“神经突触”——它将人类语言转化为计算机可计算的语义向量,支撑着搜索引擎、推荐系统、…...

vue3 定时器-定义全局方法 vue+ts
1.创建ts文件 路径:src/utils/timer.ts 完整代码: import { onUnmounted } from vuetype TimerCallback (...args: any[]) > voidexport function useGlobalTimer() {const timers: Map<number, NodeJS.Timeout> new Map()// 创建定时器con…...

unix/linux,sudo,其发展历程详细时间线、由来、历史背景
sudo 的诞生和演化,本身就是一部 Unix/Linux 系统管理哲学变迁的微缩史。来,让我们拨开时间的迷雾,一同探寻 sudo 那波澜壮阔(也颇为实用主义)的发展历程。 历史背景:su的时代与困境 ( 20 世纪 70 年代 - 80 年代初) 在 sudo 出现之前,Unix 系统管理员和需要特权操作的…...

#Uniapp篇:chrome调试unapp适配
chrome调试设备----使用Android模拟机开发调试移动端页面 Chrome://inspect/#devices MuMu模拟器Edge浏览器:Android原生APP嵌入的H5页面元素定位 chrome://inspect/#devices uniapp单位适配 根路径下 postcss.config.js 需要装这些插件 “postcss”: “^8.5.…...
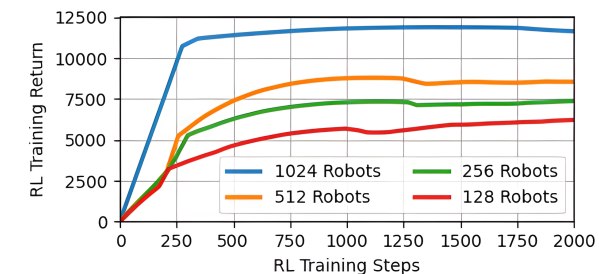
【VLNs篇】07:NavRL—在动态环境中学习安全飞行
项目内容论文标题NavRL: 在动态环境中学习安全飞行 (NavRL: Learning Safe Flight in Dynamic Environments)核心问题解决无人机在包含静态和动态障碍物的复杂环境中进行安全、高效自主导航的挑战,克服传统方法和现有强化学习方法的局限性。核心算法基于近端策略优化…...
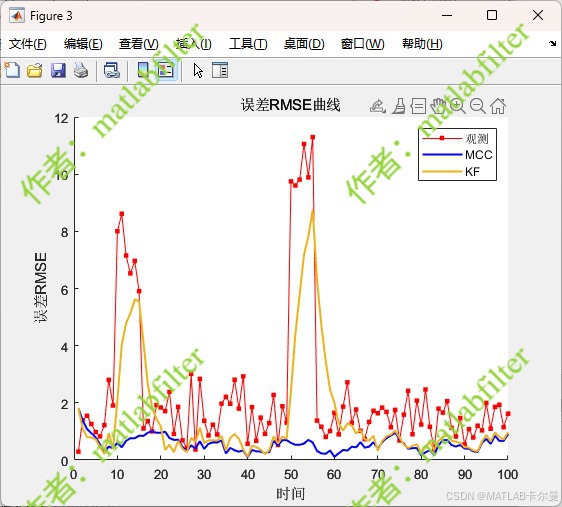
【MATLAB代码】基于最大相关熵准则(MCC)的三维鲁棒卡尔曼滤波算法(MCC-KF),附源代码|订阅专栏后可直接查看
文章所述的代码实现了基于最大相关熵准则(MCC)的三维鲁棒卡尔曼滤波算法(MCC-KF),针对传感器观测数据中存在的脉冲型异常噪声问题,通过非线性加权机制提升滤波器的抗干扰能力。代码通过对比传统KF与MCC-KF在含异常值场景下的表现,验证了后者在状态估计鲁棒性方面的显著优…...

破解路内监管盲区:免布线低位视频桩重塑停车管理新标准
城市路内停车管理常因行道树遮挡、高位设备盲区等问题,导致车牌识别率低、逃费率高,传统模式在复杂路段束手无策。免布线低位视频桩凭借超低视角部署与智能算法,正成为破局关键。该设备安装于车位侧方0.5-0.7米高度,直接规避树枝遮…...