STM32存储左右互搏 SDIO总线读写SD/MicroSD/TF卡
STM32存储左右互搏 SDIO总线读写SD/MicroSD/TF卡
SD/MicroSD/TF卡是基于FLASH的一种常见非易失存储单元,由接口协议电路和FLASH构成。市面上由不同尺寸和不同容量的卡,手机领域用的TF卡实际就是MicroSD卡,尺寸比SD卡小,而电路和协议操作则是一样。这里介绍STM32CUBEIDE开发平台HAL库SDIO总线操作SD/MicroSD/TF卡的例程。
SD/MicroSD/TF卡访问接口
SD/MicroSD/TF卡可以通过访问更快的SDIO专用协议接口或是访问慢一些的普通SPI接口进行操作,两种协议接口复用管脚。通过SDIO访问的接口连接方式如下:
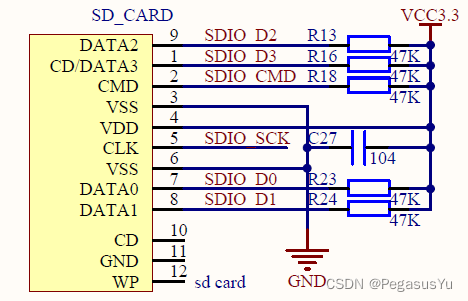
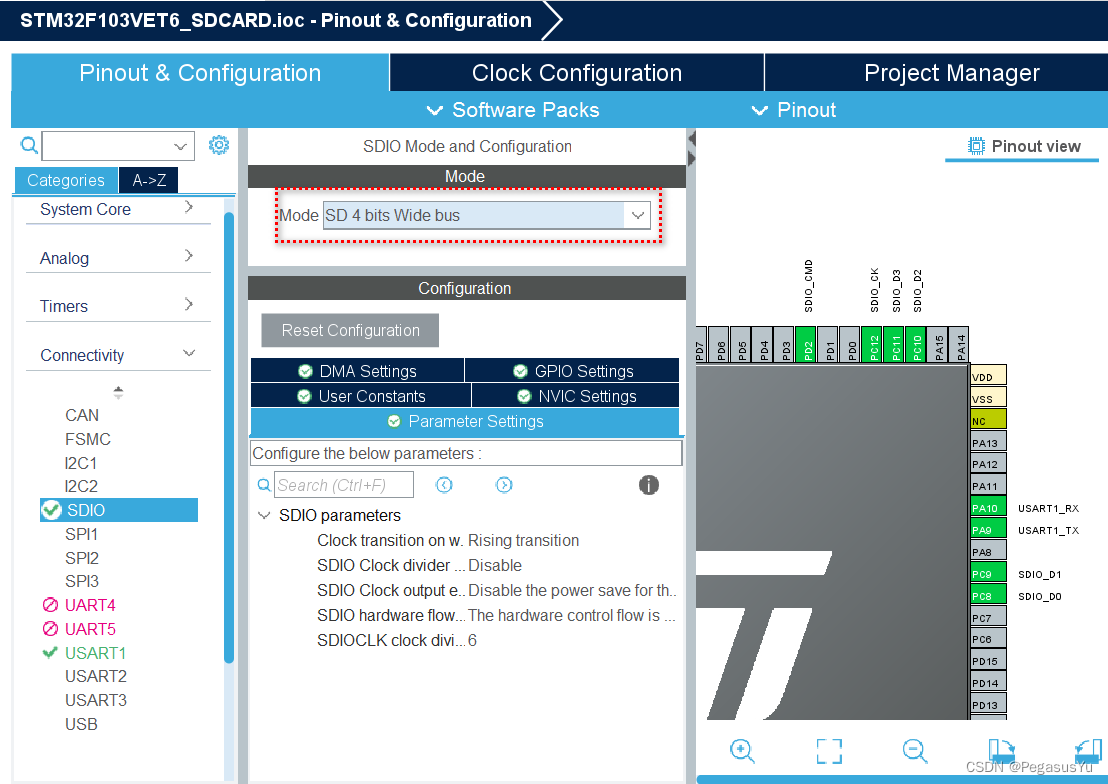
其中CMD连接用于指示发送的是命令还是数据。CLK提供访问同步时钟,4根数据线(DATA0 ~ DATA3 )则实现信息双向传输。
SDIO可以操作在1bit数据线和4bit数据线模式,因为4bit数据线明显效率高于1bit数据线模式,所以1bit数据线模式很少用,只有在某种极限节省连接资源的情况下可以用1bit数据线模式,在1bit模式下,数据线DATA0用来传输数据,DATA1用作中断。在4bit数据线模式下,数据线DATA0~DATA3用于传输数据,其中DATA1复用作中断线。
例程采用STM32F103VET6芯片对4GB的TF卡进行操作,TF卡也可以插入转换卡套插入SD卡接口。
STM32工程配置
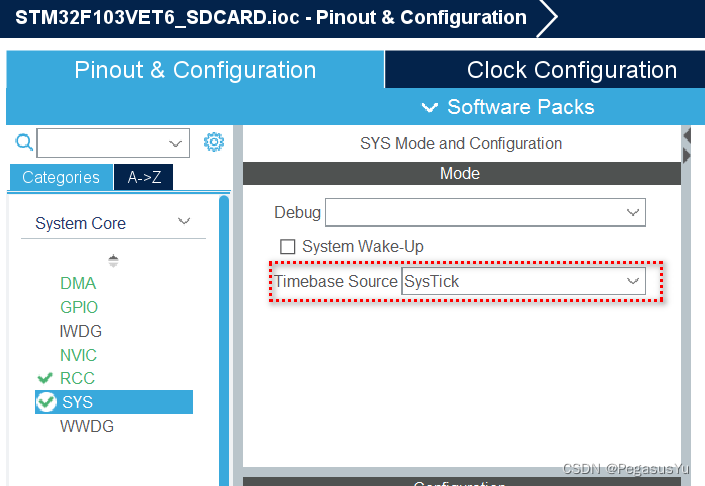
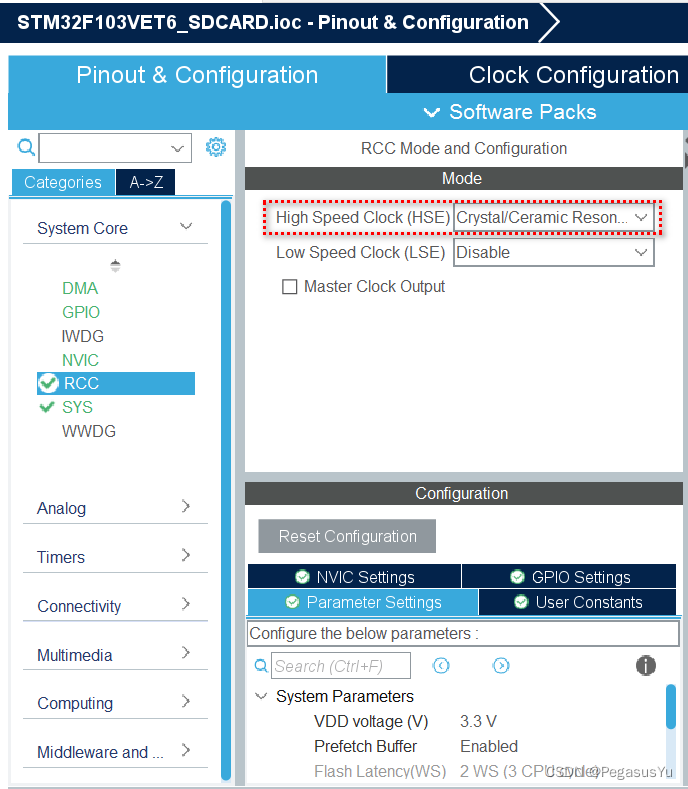
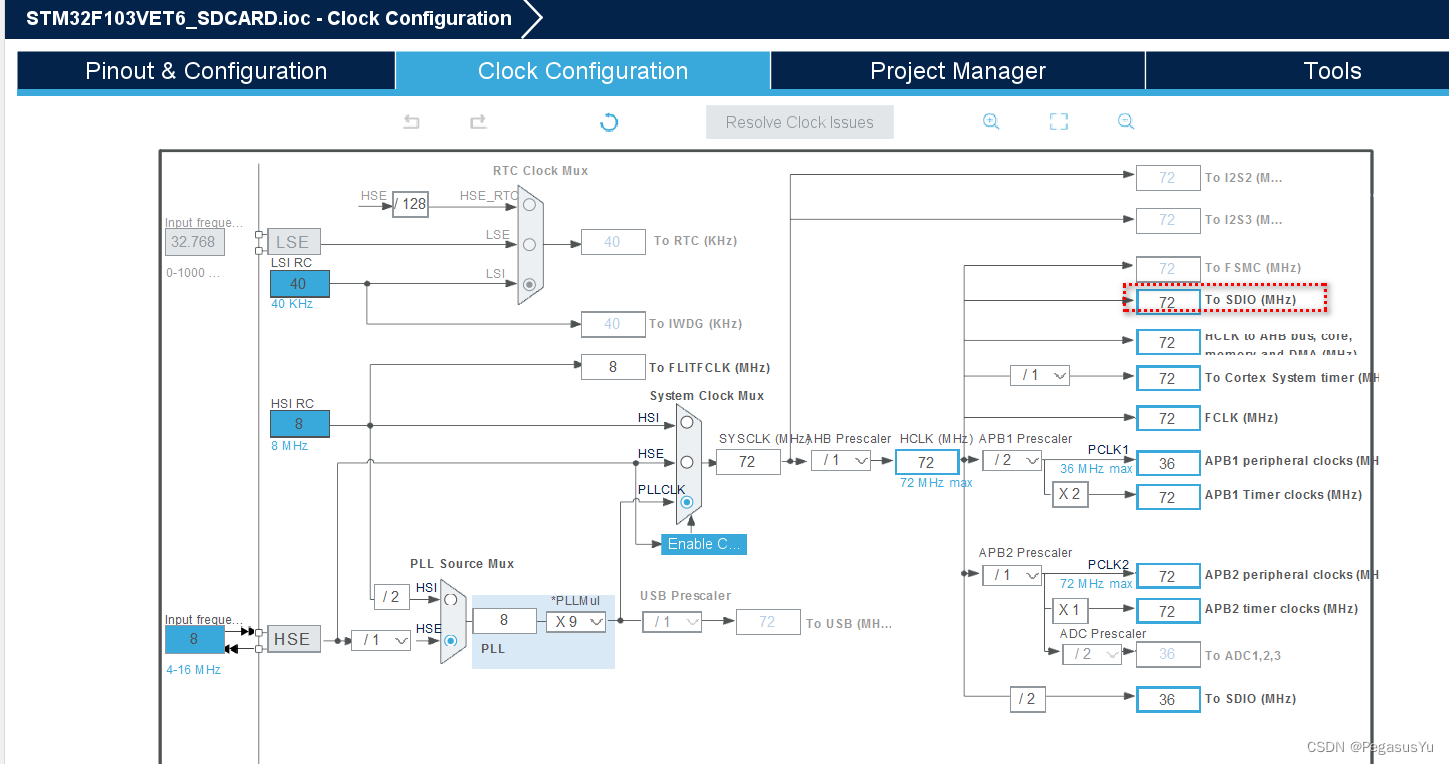
首先建立基本工程并设置时钟:
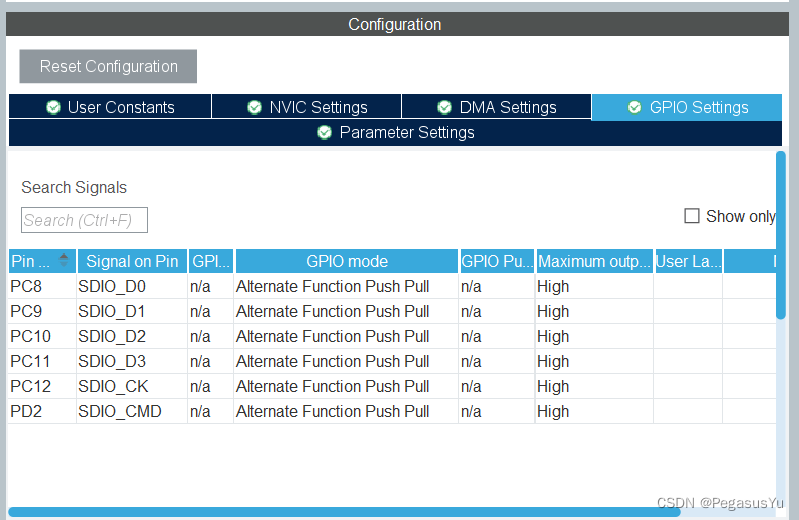
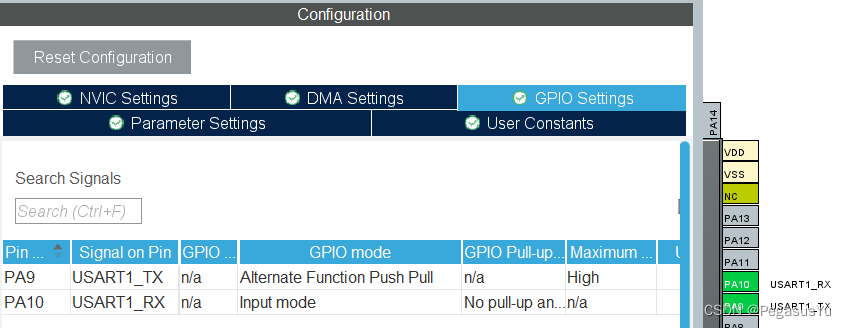
配置SDIO接口:
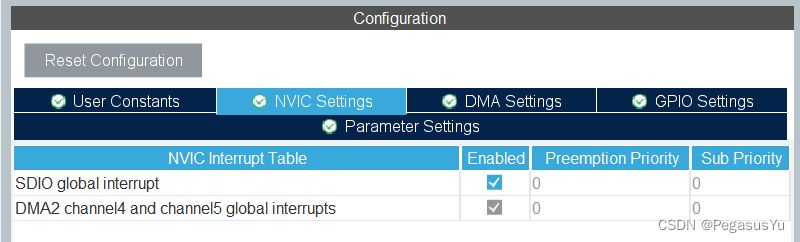
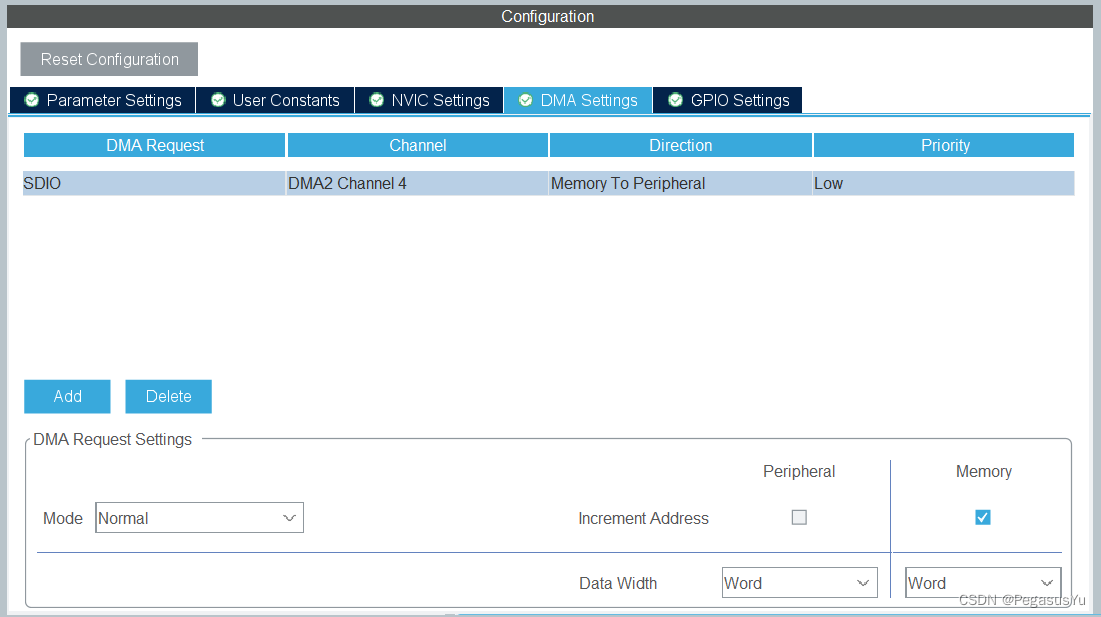
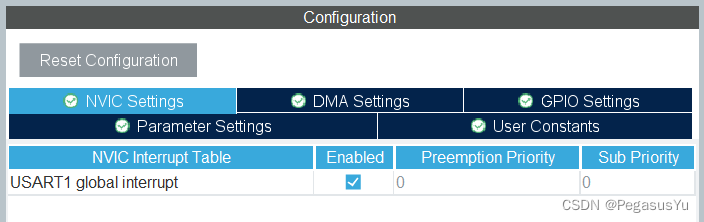
配置使用DMA, 优先级可以根据需要调整:
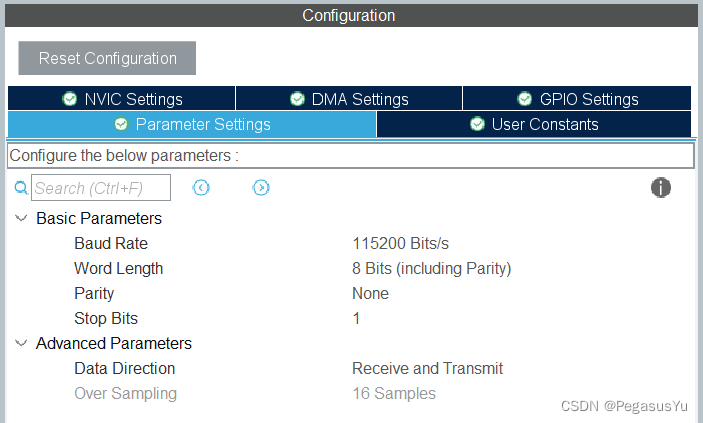
配置UART1作为控制和打印输出接口:
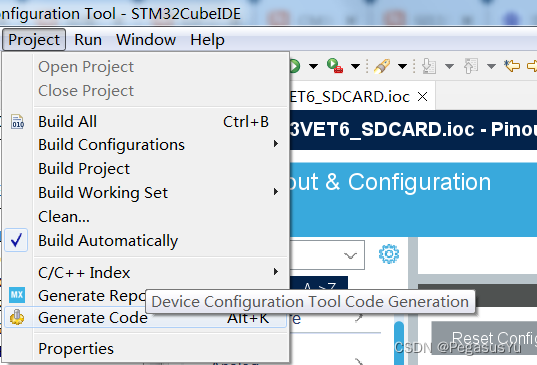
保存并生成初始工程代码:
STM32工程代码
UART串口printf打印输出实现参考:STM32 UART串口printf函数应用及浮点打印代码空间节省 (HAL)
对SD/MicroSD/TF卡的SDIO接口操作可以调用HAL库函数进行,代码实现在main.c文件里,实现如下功能:
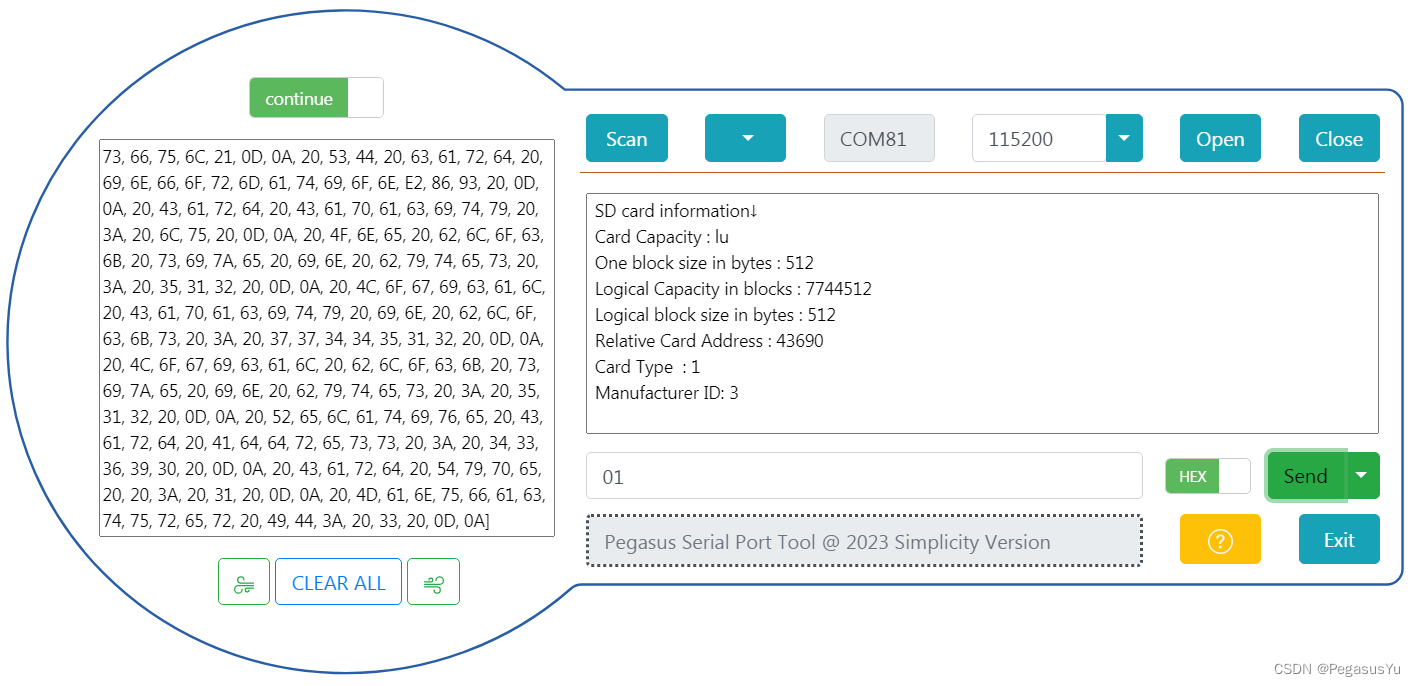
- 串口收到0x01指令,查询SD/MicroSD/TF卡容量等信息
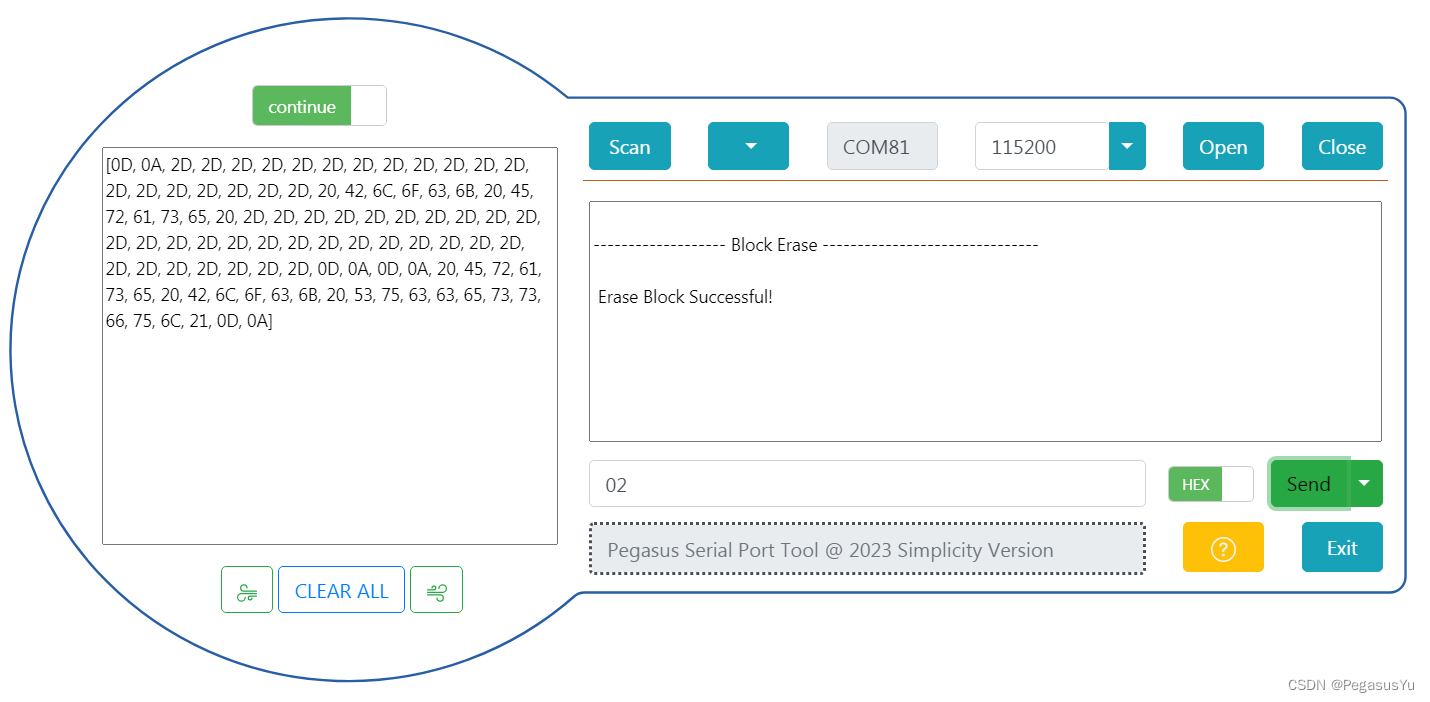
- 串口收到0x02指令,执行特定区域(块0)的擦除
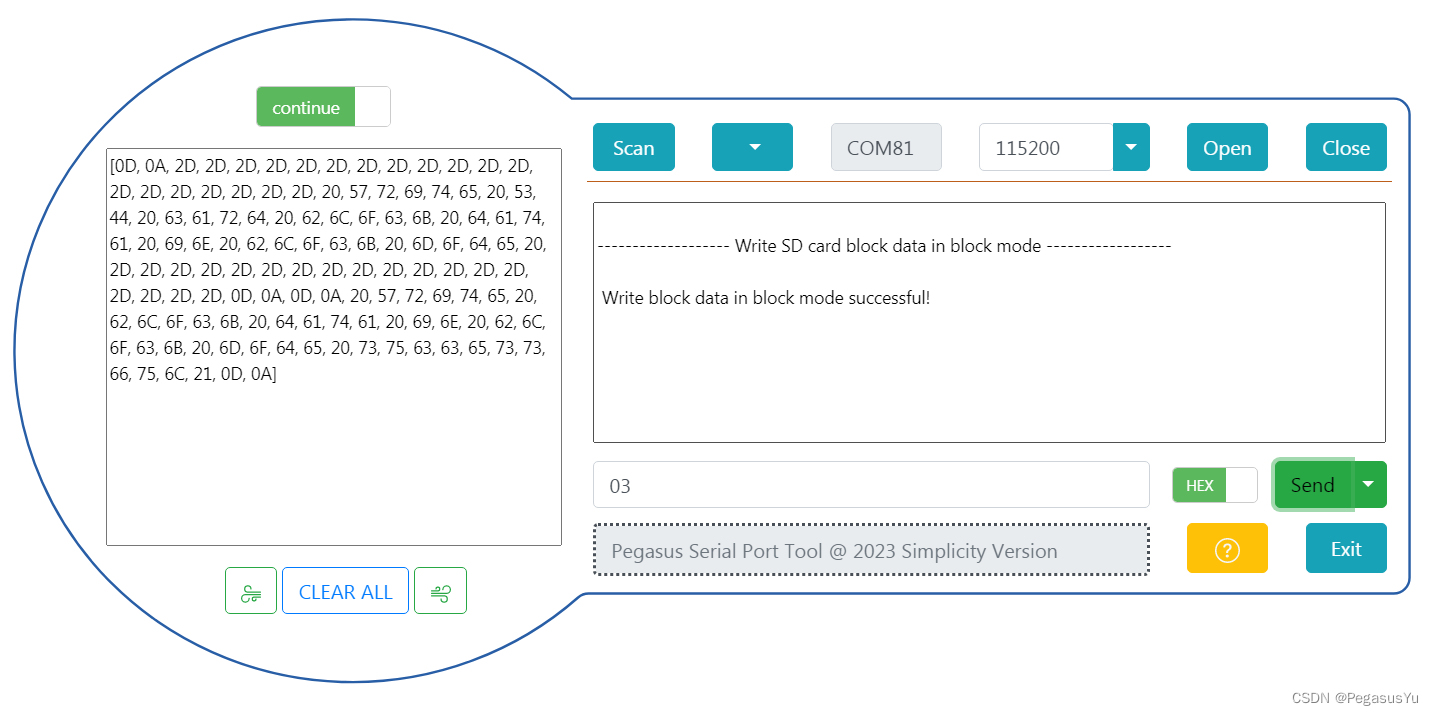
- 串口收到0x03指令,阻塞模式执行写操作
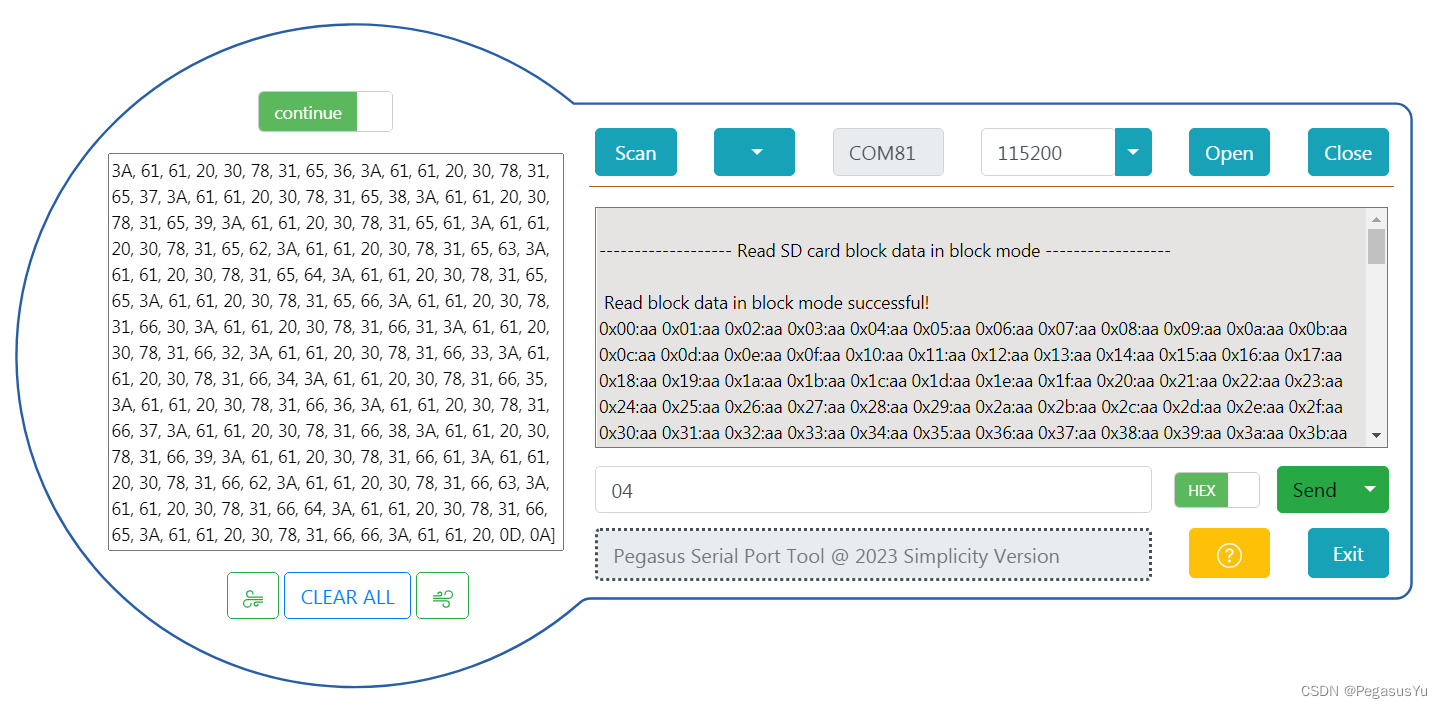
- 串口收到0x04指令,阻塞模式执行读操作
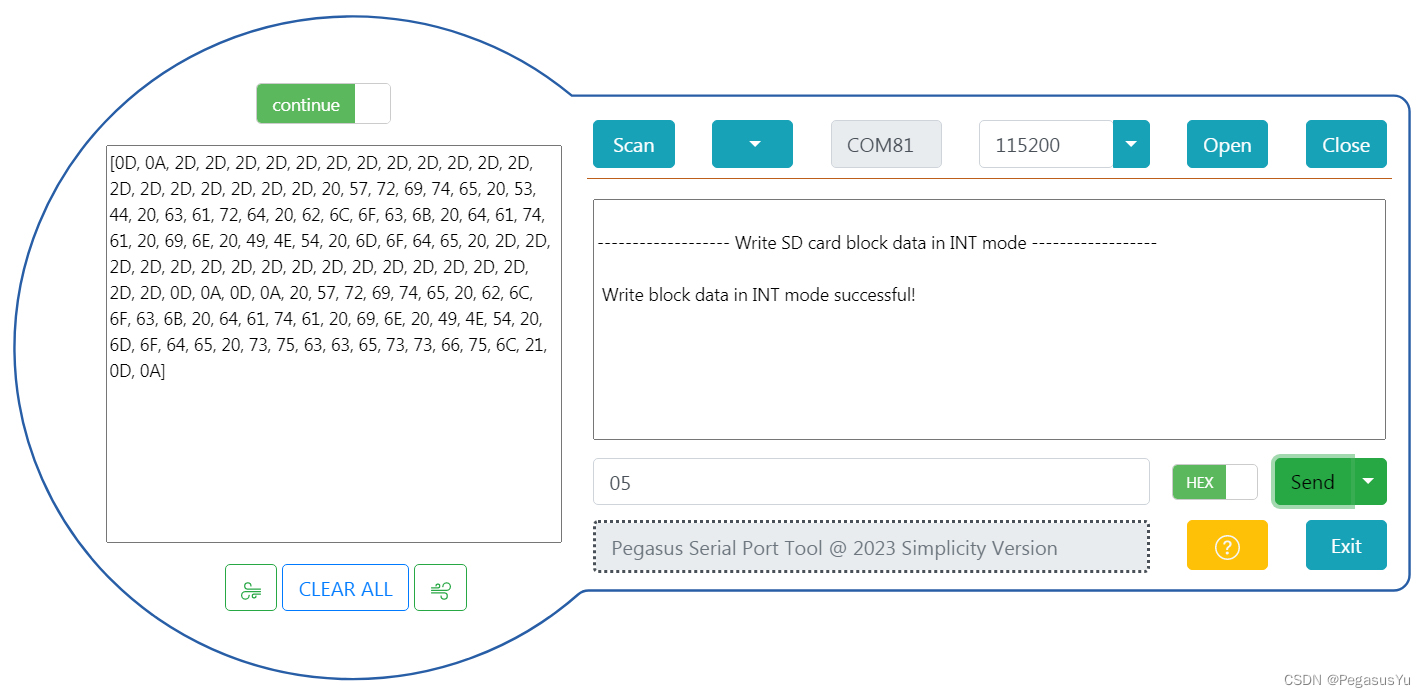
- 串口收到0x05指令,中断模式执行写操作
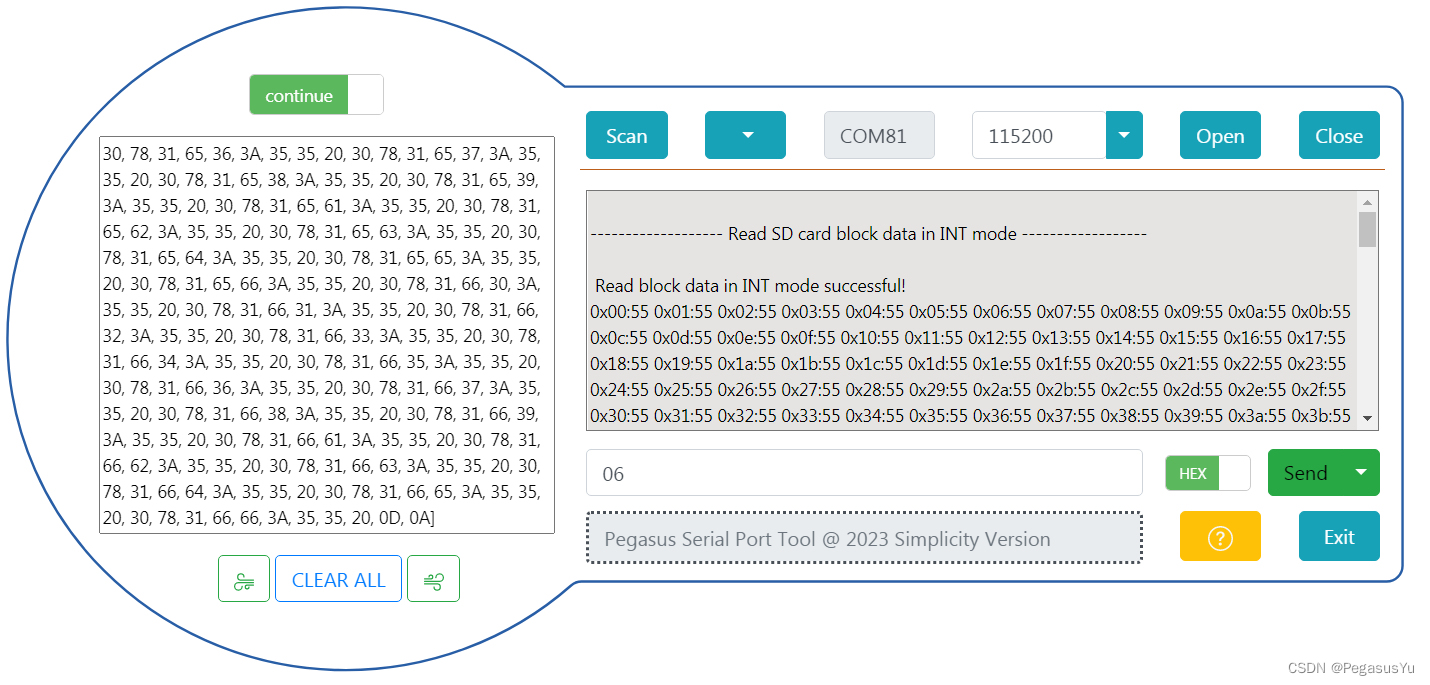
- 串口收到0x06指令,中断模式执行读操作
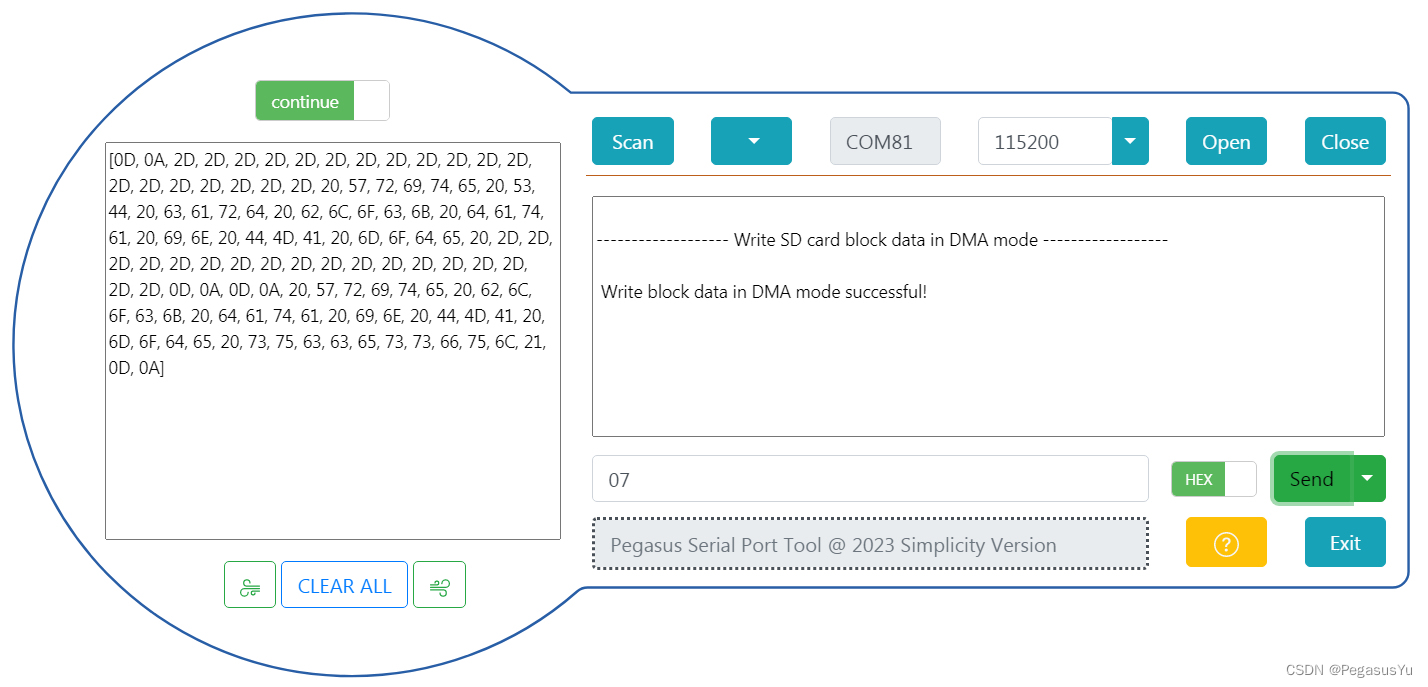
- 串口收到0x07指令,DMA模式执行写操作
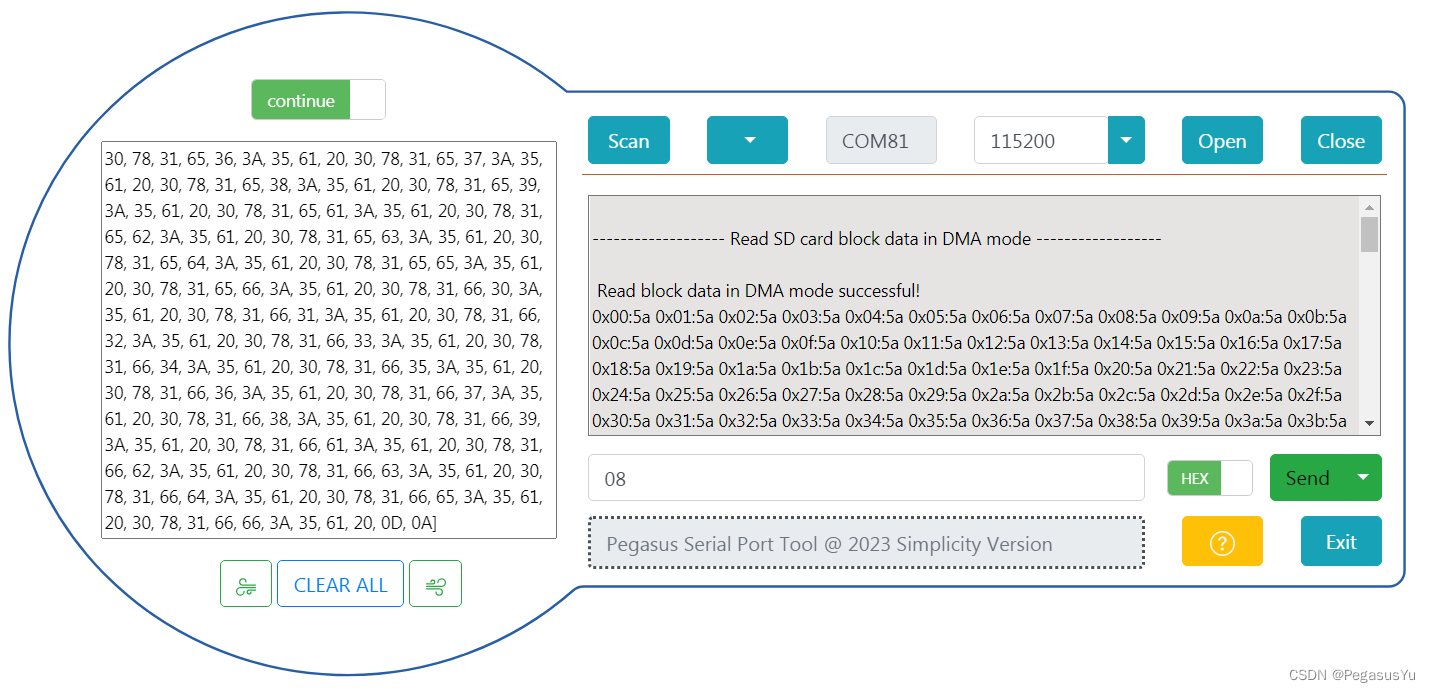
- 串口收到0x08指令,DMA模式执行读操作
完整的main.c代码如下:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2022 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "string.h"
#include "usart.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{__IO uint32_t firstms, secondms;__IO uint32_t counter = 0;firstms = HAL_GetTick()+1;secondms = firstms+1;while(uwTick!=firstms) ;while(uwTick!=secondms) counter++;usDelayBase = ((float)counter)/1000;
}void PY_Delay_us_t(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);delayReg = 0;while(delayReg!=usNum) delayReg++;
}void PY_usDelayOptimize(void)
{__IO uint32_t firstms, secondms;__IO float coe = 1.0;firstms = HAL_GetTick();PY_Delay_us_t(1000000) ;secondms = HAL_GetTick();coe = ((float)1000)/(secondms-firstms);usDelayBase = coe*usDelayBase;
}void PY_Delay_us(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t msNum = Delay/1000;__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);if(msNum>0) HAL_Delay(msNum);delayReg = 0;while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
//#define BLOCKSIZE 512U /*!< Block size is 512 bytes */
#define BLOCK_START_ADDR 0 /* Block start address */
#define NUM_OF_BLOCKS 1 /* Total number of blocks */
#define BUFFER_WORDS_SIZE ((BLOCKSIZE * NUM_OF_BLOCKS) >> 2) /* Total data size in bytes *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
SD_HandleTypeDef hsd;
DMA_HandleTypeDef hdma_sdio;UART_HandleTypeDef huart1;/* USER CODE BEGIN PV */
uint8_t uart1_rxd[256];
uint8_t uart1_txd[256];
uint8_t cmd;/* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_SDIO_SD_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t SD_Buffer_Tx[512] = {0} ;
uint8_t SD_Buffer_Rx[512] = {0};uint32_t SD_Status = 0;
uint32_t SD_Rx_Int = 0;
uint32_t SD_Tx_Int = 0;void SD_DMA_INIT_M2P(SD_HandleTypeDef* hsd) //DMA init: memory --> peripheral
{HAL_DMA_DeInit(&hdma_sdio);/* SDIO DMA Init *//* SDIO Init */hdma_sdio.Instance = DMA2_Channel4;hdma_sdio.Init.Direction = DMA_MEMORY_TO_PERIPH;hdma_sdio.Init.PeriphInc = DMA_PINC_DISABLE;hdma_sdio.Init.MemInc = DMA_MINC_ENABLE;hdma_sdio.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;hdma_sdio.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;hdma_sdio.Init.Mode = DMA_NORMAL;hdma_sdio.Init.Priority = DMA_PRIORITY_LOW;if (HAL_DMA_Init(&hdma_sdio) != HAL_OK){Error_Handler();}/* Several peripheral DMA handle pointers point to the same DMA handle.Be aware that there is only one channel to perform all the requested DMAs. *//* Be sure to change transfer direction before callingHAL_SD_ReadBlocks_DMA or HAL_SD_WriteBlocks_DMA. */__HAL_LINKDMA(hsd,hdmarx,hdma_sdio);__HAL_LINKDMA(hsd,hdmatx,hdma_sdio);
}void SD_DMA_INIT_P2M(SD_HandleTypeDef* hsd) //DMA init: memory <-- peripheral
{HAL_DMA_DeInit(&hdma_sdio);/* SDIO DMA Init *//* SDIO Init */hdma_sdio.Instance = DMA2_Channel4;hdma_sdio.Init.Direction = DMA_PERIPH_TO_MEMORY;hdma_sdio.Init.PeriphInc = DMA_PINC_DISABLE;hdma_sdio.Init.MemInc = DMA_MINC_ENABLE;hdma_sdio.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;hdma_sdio.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;hdma_sdio.Init.Mode = DMA_NORMAL;hdma_sdio.Init.Priority = DMA_PRIORITY_LOW;if (HAL_DMA_Init(&hdma_sdio) != HAL_OK){Error_Handler();}/* Several peripheral DMA handle pointers point to the same DMA handle.Be aware that there is only one channel to perform all the requested DMAs. *//* Be sure to change transfer direction before callingHAL_SD_ReadBlocks_DMA or HAL_SD_WriteBlocks_DMA. */__HAL_LINKDMA(hsd,hdmarx,hdma_sdio);__HAL_LINKDMA(hsd,hdmatx,hdma_sdio);
}
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_DMA_Init();MX_SDIO_SD_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */PY_usDelayTest();PY_usDelayOptimize();HAL_UART_Receive_IT(&huart1, uart1_rxd, 1);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/*HAL_SD_CARD_TRANSFER is the operate correct and complete status for SD card operation*/if(cmd==0x01) //Get SD card information{cmd = 0;printf("\r\n SD card test...\r\n");if(HAL_SD_GetCardState(&hsd) == HAL_SD_CARD_TRANSFER) //Get SD card resource info{printf("\r\n Initialize SD card successful!\r\n");printf(" SD card information↓ \r\n");printf(" Card Capacity : %llu \r\n", (unsigned long long)hsd.SdCard.BlockSize * hsd.SdCard.BlockNbr);printf(" One block size in bytes : %d \r\n", (int)hsd.SdCard.BlockSize);printf(" Logical Capacity in blocks : %d \r\n", (int)hsd.SdCard.LogBlockNbr);printf(" Logical block size in bytes : %d \r\n", (int)hsd.SdCard.LogBlockSize);printf(" Relative Card Address : %d \r\n", (int)hsd.SdCard.RelCardAdd);printf(" Card Type : %d \r\n", (int)hsd.SdCard.CardType);HAL_SD_CardCIDTypeDef sdcard_cid;HAL_SD_GetCardCID(&hsd,&sdcard_cid); //Get SD card vendor infoprintf(" Manufacturer ID: %d \r\n", (int)sdcard_cid.ManufacturerID);}else{printf("\r\n SD card initiation failed!\r\n" );}}else if(cmd==0x02) //Erase SD card block{cmd = 0;printf("\r\n------------------- Block Erase -------------------------------\r\n");if(HAL_SD_Erase(&hsd, BLOCK_START_ADDR, NUM_OF_BLOCKS) == HAL_OK) //Erase block operation{while(HAL_SD_GetCardState(&hsd) != HAL_SD_CARD_TRANSFER) PY_Delay_us_t(10);printf("\r\n Erase Block Successful!\r\n");}else{printf("\r\n Erase Block Failed!\r\n");}}else if(cmd==0x03) //SD card write in block mode{cmd = 0;memset(SD_Buffer_Tx, 0xAA, sizeof(SD_Buffer_Tx)); //0xAA written into buffer for this testprintf("\r\n------------------- Write SD card block data in block mode ------------------\r\n");__disable_irq();SD_Status = HAL_SD_WriteBlocks(&hsd, SD_Buffer_Tx, BLOCK_START_ADDR, NUM_OF_BLOCKS, 0xFFFFFFFF); //Write block operation in block modeif(SD_Status==HAL_OK){while(HAL_SD_GetCardState(&hsd) != HAL_SD_CARD_TRANSFER) PY_Delay_us_t(10); //Wait for write endprintf("\r\n Write block data in block mode successful!\r\n");}else{printf("\r\n Write block data in block mode failed!\r\n");}__enable_irq();}else if(cmd==0x04) //SD card read in block mode{cmd = 0;printf("\r\n------------------- Read SD card block data in block mode ------------------\r\n");__disable_irq();SD_Status = HAL_SD_ReadBlocks(&hsd, SD_Buffer_Rx, BLOCK_START_ADDR, NUM_OF_BLOCKS, 0xFFFFFFFF); //read block operation in block modeif( SD_Status== HAL_OK){while(HAL_SD_GetCardState(&hsd) != HAL_SD_CARD_TRANSFER) PY_Delay_us_t(10); //Wait for read endprintf("\r\n Read block data in block mode successful!\r\n");for(uint32_t i = 0; i < sizeof(SD_Buffer_Rx); i++){printf("0x%02x:%02x ", (unsigned int)i, (unsigned int)SD_Buffer_Rx[i]);}printf("\r\n");}else{printf("\r\n Read block data in block mode failed!\r\n");}__enable_irq();}else if(cmd==0x05) //SD card write in INT mode{cmd = 0;memset(SD_Buffer_Tx, 0x55, sizeof(SD_Buffer_Tx)); //0x55 written into buffer for this testprintf("\r\n------------------- Write SD card block data in INT mode ------------------\r\n");SD_Tx_Int = 1;SD_Status = HAL_SD_WriteBlocks_IT(&hsd, SD_Buffer_Tx, BLOCK_START_ADDR, NUM_OF_BLOCKS); //write block operation in INT modeif(SD_Status== HAL_OK){while(SD_Tx_Int==1) PY_Delay_us_t(1); //Wait for write endprintf("\r\n Write block data in INT mode successful!\r\n");}else{printf("\r\n Write block data in INT mode failed!\r\n");}}else if(cmd==0x06) //SD card read in INT mode{cmd = 0;printf("\r\n------------------- Read SD card block data in INT mode ------------------\r\n");SD_Rx_Int = 1;SD_Status = HAL_SD_ReadBlocks_IT(&hsd, SD_Buffer_Rx, BLOCK_START_ADDR, NUM_OF_BLOCKS); //read block operation in INT modeif( SD_Status== HAL_OK){while(SD_Rx_Int==1) PY_Delay_us_t(1); //Wait for read endprintf("\r\n Read block data in INT mode successful!\r\n");for(uint32_t i = 0; i < sizeof(SD_Buffer_Rx); i++){printf("0x%02x:%02x ", (unsigned int)i, (unsigned int)SD_Buffer_Rx[i]);}printf("\r\n");}else{printf("\r\n Read block data in INT mode failed!\r\n");}}else if(cmd==0x07) //SD card write in DMA mode{cmd = 0;SD_DMA_INIT_M2P(&hsd); //Switch DMA mode directionmemset(SD_Buffer_Tx, 0x5A, sizeof(SD_Buffer_Tx)); //0x5A written into buffer for this testprintf("\r\n------------------- Write SD card block data in DMA mode ------------------\r\n");SD_Tx_Int = 1;SD_Status = HAL_SD_WriteBlocks_DMA(&hsd, SD_Buffer_Tx, BLOCK_START_ADDR, NUM_OF_BLOCKS); //write block operation in DMA modeif(SD_Status== HAL_OK){while(SD_Tx_Int==1) PY_Delay_us_t(1); //Wait for write endprintf("\r\n Write block data in DMA mode successful!\r\n");}else{printf("\r\n Write block data in DMA mode failed!\r\n");}}else if(cmd==0x08) //SD card read in DMA mode{cmd = 0;SD_DMA_INIT_P2M(&hsd); //Switch DMA mode directionprintf("\r\n------------------- Read SD card block data in DMA mode ------------------\r\n");SD_Rx_Int = 1;SD_Status = HAL_SD_ReadBlocks_DMA(&hsd, SD_Buffer_Rx, BLOCK_START_ADDR, NUM_OF_BLOCKS); //read block operation in DMA modeif( SD_Status== HAL_OK){while(SD_Rx_Int==1) PY_Delay_us_t(1); //Wait for read endprintf("\r\n Read block data in DMA mode successful!\r\n");for(uint32_t i = 0; i < sizeof(SD_Buffer_Rx); i++){printf("0x%02x:%02x ", (unsigned int)i, (unsigned int)SD_Buffer_Rx[i]);}printf("\r\n");}else{printf("\r\n Read block data in DMA mode failed!\r\n");}}else;/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/*** @brief SDIO Initialization Function* @param None* @retval None*/
static void MX_SDIO_SD_Init(void)
{/* USER CODE BEGIN SDIO_Init 0 *//* USER CODE END SDIO_Init 0 *//* USER CODE BEGIN SDIO_Init 1 *//* USER CODE END SDIO_Init 1 */hsd.Instance = SDIO;hsd.Init.ClockEdge = SDIO_CLOCK_EDGE_RISING;hsd.Init.ClockBypass = SDIO_CLOCK_BYPASS_DISABLE;hsd.Init.ClockPowerSave = SDIO_CLOCK_POWER_SAVE_DISABLE;hsd.Init.BusWide = SDIO_BUS_WIDE_1B;hsd.Init.HardwareFlowControl = SDIO_HARDWARE_FLOW_CONTROL_ENABLE;hsd.Init.ClockDiv = 6;if (HAL_SD_Init(&hsd) != HAL_OK){Error_Handler();}if (HAL_SD_ConfigWideBusOperation(&hsd, SDIO_BUS_WIDE_4B) != HAL_OK){Error_Handler();}/* USER CODE BEGIN SDIO_Init 2 *//* USER CODE END SDIO_Init 2 */}/*** @brief USART1 Initialization Function* @param None* @retval None*/
static void MX_USART1_UART_Init(void)
{/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 115200;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 *//* USER CODE END USART1_Init 2 */}/*** Enable DMA controller clock*/
static void MX_DMA_Init(void)
{/* DMA controller clock enable */__HAL_RCC_DMA2_CLK_ENABLE();/* DMA interrupt init *//* DMA2_Channel4_5_IRQn interrupt configuration */HAL_NVIC_SetPriority(DMA2_Channel4_5_IRQn, 0, 0);HAL_NVIC_EnableIRQ(DMA2_Channel4_5_IRQn);}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{/* GPIO Ports Clock Enable */__HAL_RCC_GPIOC_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOD_CLK_ENABLE();}/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart==&huart1){cmd = uart1_rxd[0];HAL_UART_Receive_IT(&huart1, uart1_rxd, 1);}
}void HAL_SD_TxCpltCallback(SD_HandleTypeDef *hsd)
{SD_Tx_Int = 0;
}void HAL_SD_RxCpltCallback(SD_HandleTypeDef *hsd)
{SD_Rx_Int = 0;
}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */STM32例程测试
串口指令0x01测试效果如下:
串口指令0x02测试效果如下:
串口指令0x03测试效果如下:
串口指令0x04测试效果如下:
串口指令0x05测试效果如下:
串口指令0x06测试效果如下:
串口指令0x07测试效果如下:
串口指令0x08测试效果如下:
STM32例程下载
STM32F103VET6 SDIO总线读写SD/MicroSD/TF卡例程下载
–End–
相关文章:
STM32存储左右互搏 SDIO总线读写SD/MicroSD/TF卡
STM32存储左右互搏 SDIO总线读写SD/MicroSD/TF卡 SD/MicroSD/TF卡是基于FLASH的一种常见非易失存储单元,由接口协议电路和FLASH构成。市面上由不同尺寸和不同容量的卡,手机领域用的TF卡实际就是MicroSD卡,尺寸比SD卡小,而电路和协…...
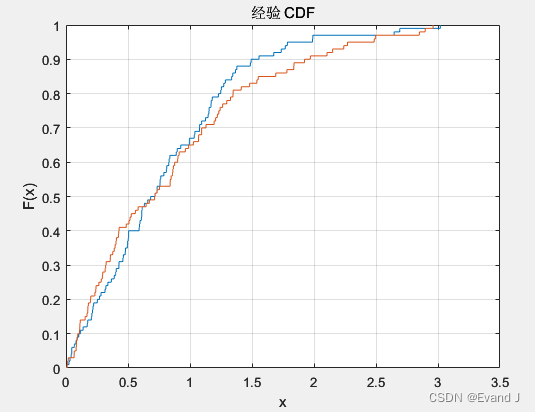
累积分布函数图(CDF)的介绍、matlab的CDF图绘制方法(附源代码)
在对比如下两个误差的时候,怎么直观地分辨出来谁的误差更低一点?: 通过这种误差时序图往往不容易看出来。 但是如果使用CDF图像,以误差绝对值作为横轴,以横轴所示误差对应的累积概率为纵轴,绘制曲线图&am…...

代码随想录算法训练营第四十一天|343.整数拆分、96不同的二叉搜索树
文档链接:https://programmercarl.com/ LeetCode343.整数拆分 题目链接:https://leetcode.cn/problems/integer-break/ 思路: j * (i - j) 是单纯的把整数拆分为两个数相乘,而j * dp[i - j]是拆分成两个以及两个以上的个数相乘…...
)
全量知识系统 程序详细设计之 统一资产模型(QA-SmartChat)
Q1. 下面我们聊聊整个全知系统的设计 的矩阵和函数,矩阵表示的是“活物”,分别 类似 一个基因的活性、一个实体的辨识度和某种特征的可区分度。 函数的可微、可积和可导性 则表示 运动的控制方式 在全知系统设计中,矩阵和函数是两个核心的组…...

已解决org.springframework.web.client.HttpClientErrorException: 400异常的正确解决方法,亲测有效!!!
已解决org.springframework.web.client.HttpClientErrorException: 400异常的正确解决方法,亲测有效!!! 文章目录 问题分析 报错原因 解决思路 解决方法 总结 在日常开发过程中,通过Spring框架提供的RestTemplat…...
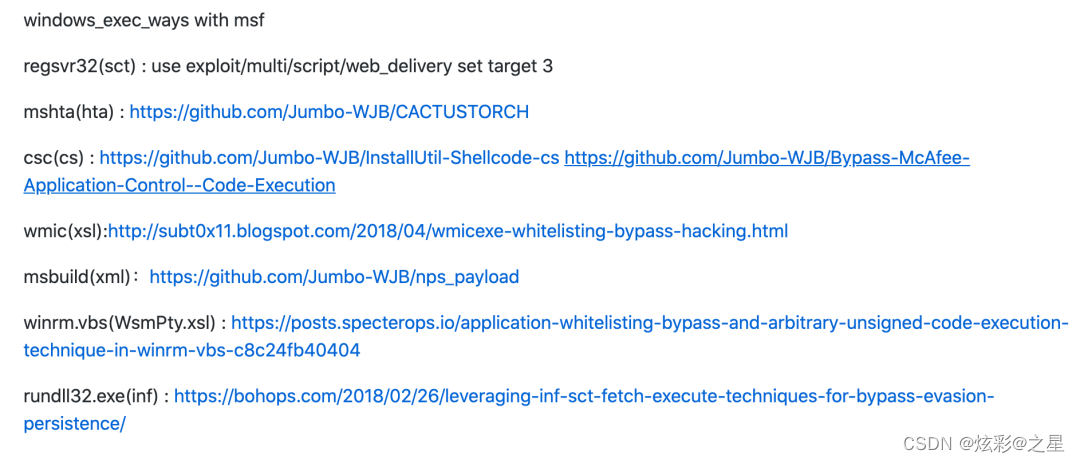
内网渗透-Windows内网渗透
内网渗透-Windows内网渗透 文章目录 内网渗透-Windows内网渗透前言一、信息收集 1.1、SPN1.2、端口连接1.3、配置文件1.4、用户信息1.6、会话收集1.7、凭据收集 navicat:SecureCRT:Xshell:WinSCP:VNC: 1.8、DPAPI1.9、域信任1.10、…...

机器人方向控制中应用的磁阻角度传感芯片
磁阻传感器提供的输出信号几乎不受磁场变动、磁温度系数、磁传感器距离与位置变动影响,可以达到高准确度与高效能,因此相当适合各种要求严格的车用电子与工业控制的应用。所以它远比采用其它传感方法的器件更具有优势。 机器人的应用日渐广泛࿰…...
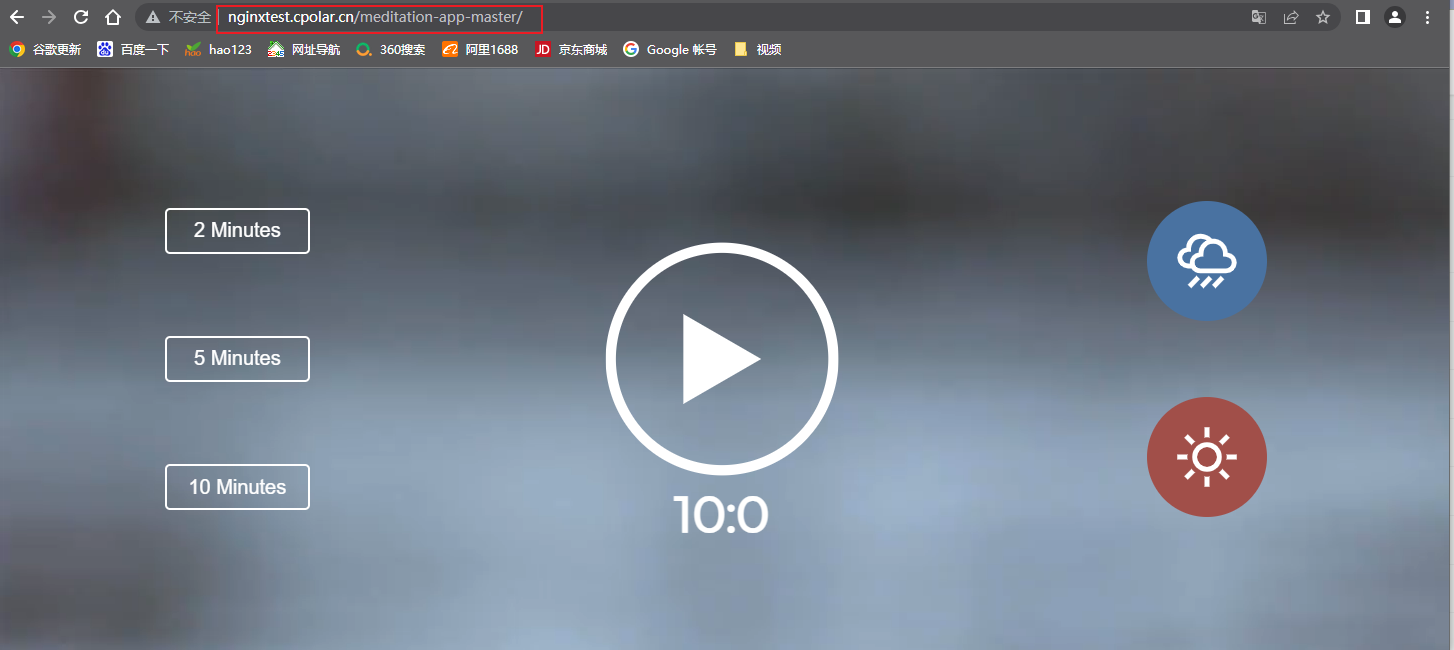
如何在树莓派安装Nginx并实现固定公网域名访问本地静态站点
文章目录 1. Nginx安装2. 安装cpolar3.配置域名访问Nginx4. 固定域名访问5. 配置静态站点 安装 Nginx(发音为“engine-x”)可以将您的树莓派变成一个强大的 Web 服务器,可以用于托管网站或 Web 应用程序。相比其他 Web 服务器,Ngi…...

Ubuntu与主机windows共享文件夹
一、创建共享文件夹: 虚拟机->设置->选项->共享文件夹->总是启用->选择本地的共享文件夹(如E:\Share)->确定。 二、设置挂载: 首先赋予/etc/fstab文件可编辑的权限; sudo chmod 777 /…...
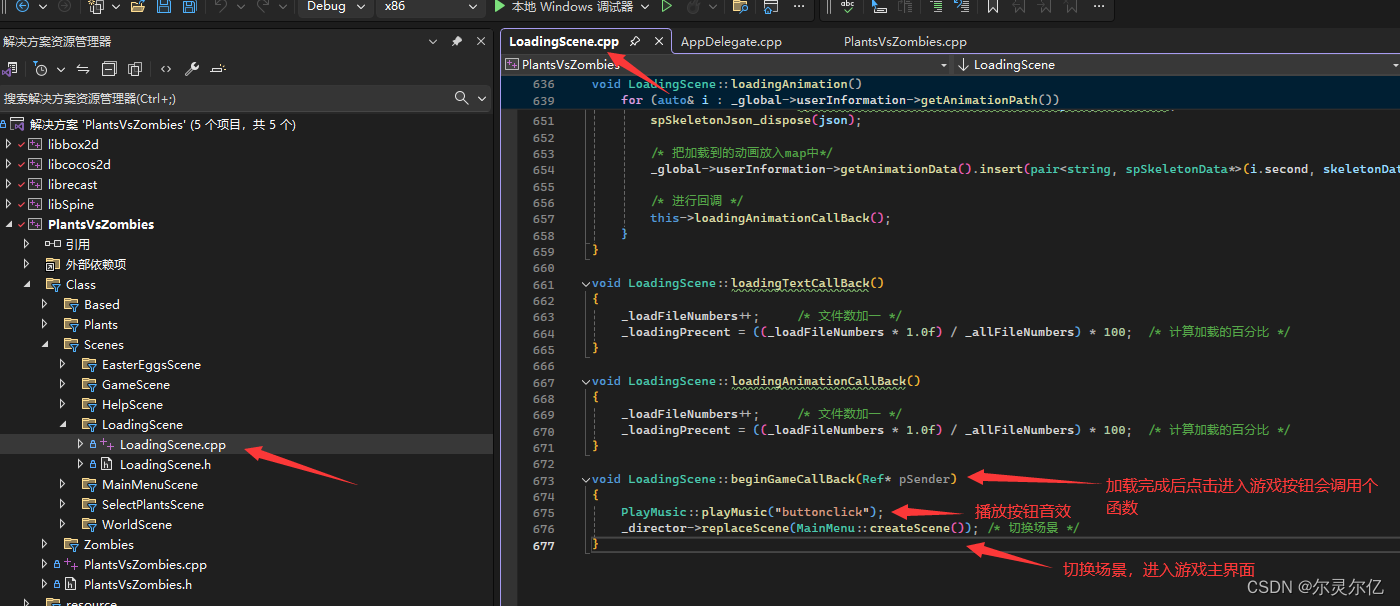
(四)C++自制植物大战僵尸游戏启动流程
植物大战僵尸游戏开发教程专栏地址http://t.csdnimg.cn/ErelL 一、启动方式 鼠标左键单机VS2022上方工具栏中绿色三角按钮(本地Windows调试器)进行项目启动。第一次启动项目需要编译项目中所有代码文件,编译生成需要一定的时间。不同性能的电…...

华为的AI战略地图上,才不是只有大模型
图片来源:pixabay© 钛媒体ToB深水区 图片来源:pixabay 大模型火热了一年,现在还没做AI化改造的企业,就像是工业革命浪潮伊始与火车赛跑的那辆马车。 最早的蒸汽火车缓慢又笨重,甚至铁轨上还预留了马匹行走的空…...

采用C#.Net +JavaScript 开发的云LIS系统源码 二级医院应用案例有演示
采用C#.Net JavaScript 开发的云LIS系统源码 二级医院应用案例有演示 一、系统简介 云LIS是为区域医疗提供临床实验室信息服务的计算机应用程序,可协助区域内所有临床实验室相互协调并完成日常检验工作,对区域内的检验数据进行集中管理和共享࿰…...
Vue3(三):生命周期、路由、自定义hooks
这里终于明白了为什么一直有这个语法报错,就是在提示你哪里错的地方上方注释一行/*eslint-disable*/,之前一直警告这个错误感谢老师! 一、vue2和vue3生命周期 还有一个问题就是父组件和子组件哪个先挂载完毕呢?答案是子组件先挂…...

UE4_导入内容_骨架网格体
FBX 导入支持 骨架网格体(Skeletal Mesh) 。这提供了一种简化的处理流程来将有动画的网格体从 3D应用程序中导入到虚幻引擎内,以便在游戏中使用。除了导入网格体外,如果需要,动画和变形目标都可以使用FBX格式 在同一文…...
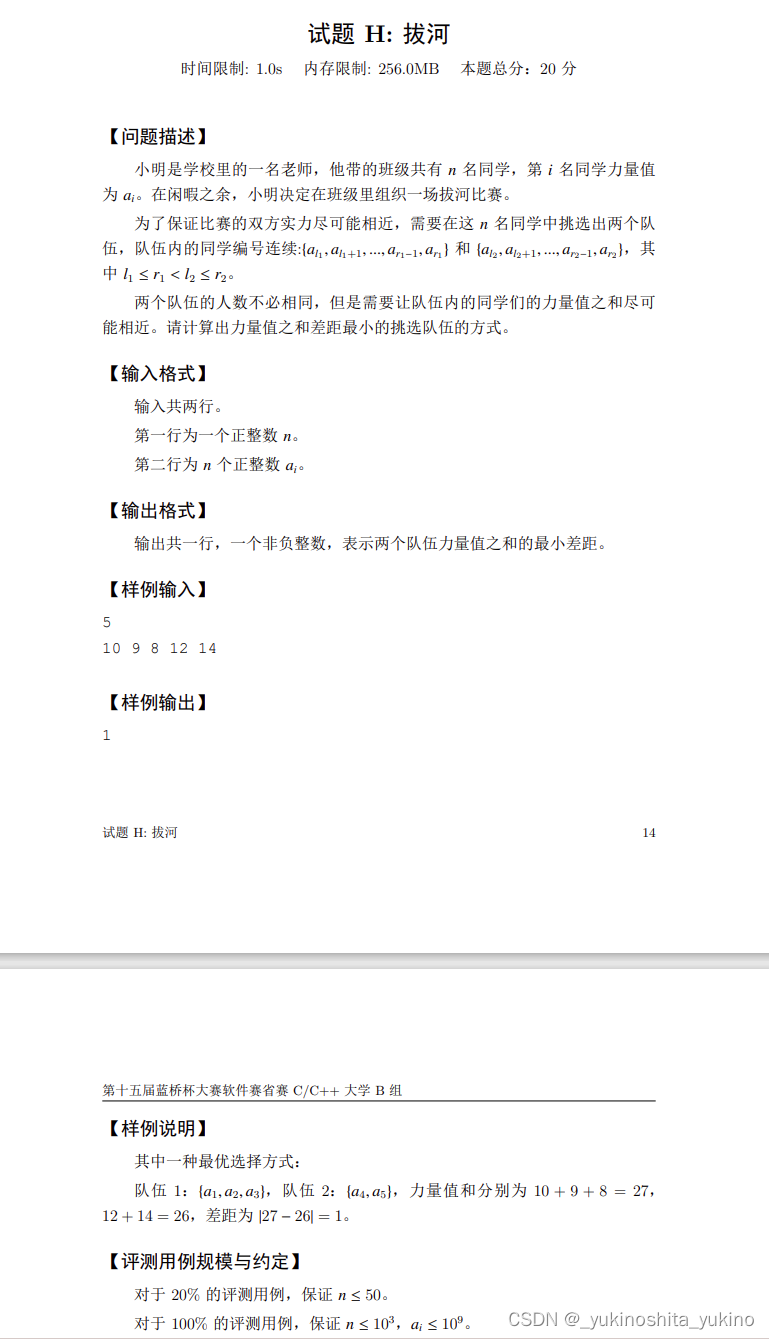
第十五届蓝桥杯c++b组赛后复盘和真题展示
题目变成八道了,分数一百分可能,感觉拿奖难度还是很高 第一题是一个简单的握手问题 答案算出来1204,纯手写 第二题是 物理题 纯蒙,随便猜了个轨迹,答案具体忘了,最后是 .45 第三题暴力 第四题 我是傻逼…...

代码随想录 二叉树—二叉搜索树中的搜索
思路:当节点为空或者等于目标值,直接返回。由于是二叉搜索树,特点是左子树的值都小于根节点值,右子树的值均大于根节点,那么,左右子树的构建可以通过值的判断来递归调用。 c题解: /*** Defini…...

⑤-1 学习PID--什么是PID
PID 算法可以用于温度控制、水位控制、飞行姿态控制等领域。后面我们通过PID 控制电机进行说明。 自动控制系统 在直流有刷电机的基础驱动中,如果电机负载不变,我们只要设置固定的占空比(电压),电机的速度就会稳定在…...
【OTA】STM32-OTA升级——持续更新
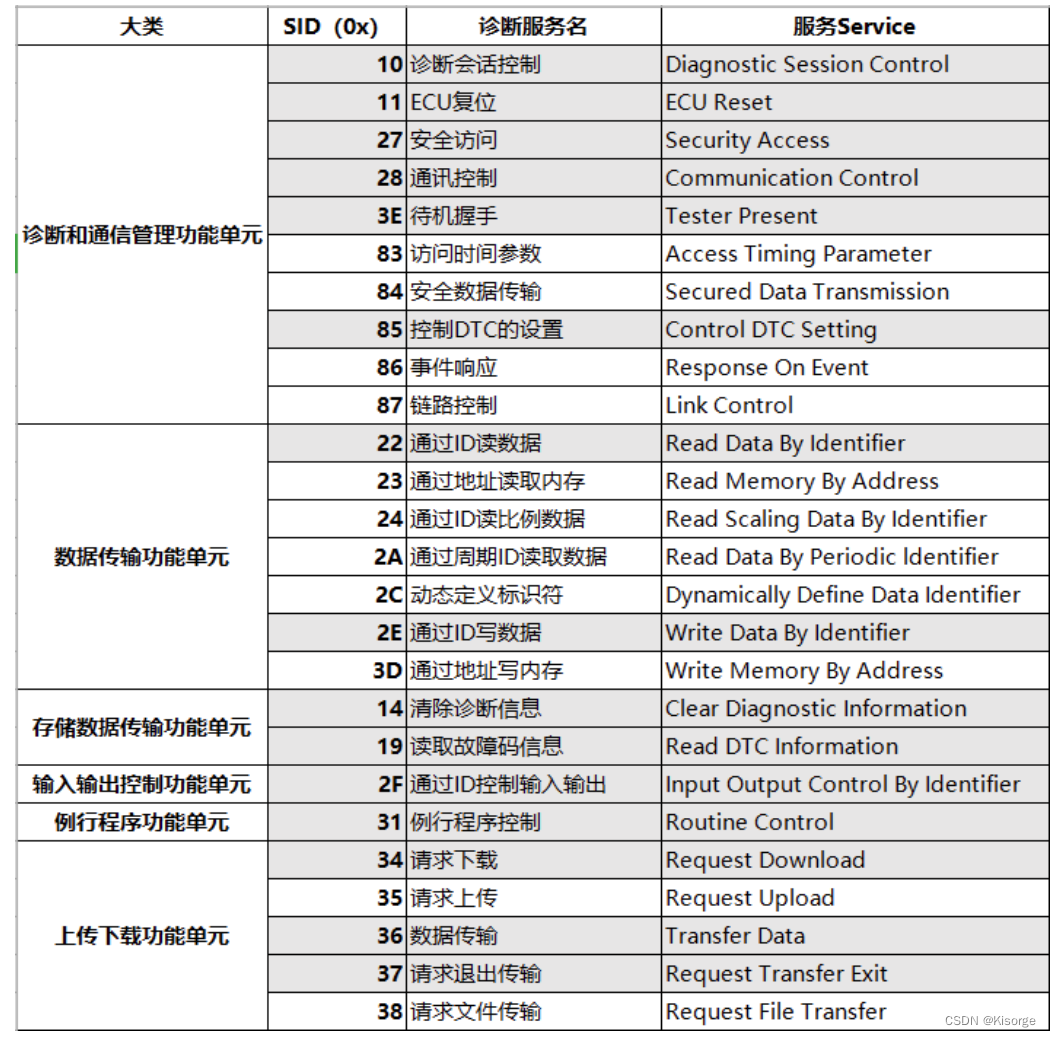
【OTA】STM32-OTA升级——持续更新 文章目录 前言一、ymodem串口协议1、Ymodem 协议2、PC3、蓝牙4、WIFI云平台 二、UDS车载协议1.UDS协议 总结 前言 提示:以下是本篇文章正文内容,下面案例可供参考 一、ymodem串口协议 1、Ymodem 协议 STM32 Ymodem …...
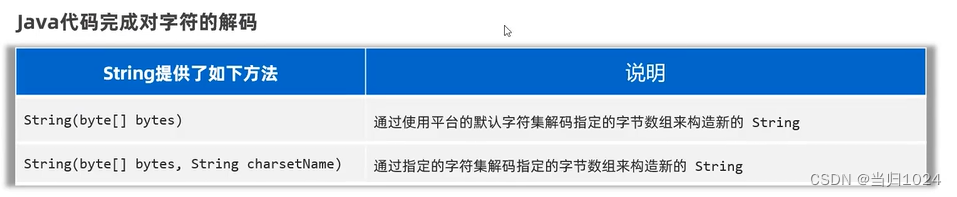
java 字符集
ASCII 与 GBK ASCII:英文专用GBK:中文专用 万国码 unicode想要统一这个世界上所有的语言,所以创造了UTF-32但是使用32位,也就是4个字节,对于很多语言来说,过于奢侈,也会造成通信效率和存储效率变低 UTF-8 unicode 创造…...
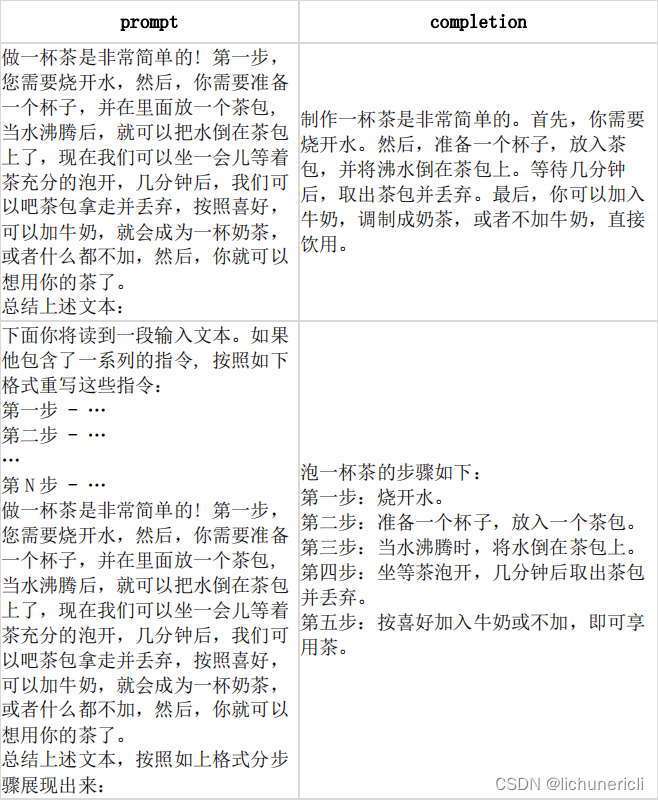
Alibaba --- 如何写好 Prompt ?
如何写好 Prompt 提示工程(Prompt Engineering)是一项通过优化提示词(Prompt)和生成策略,从而获得更好的模型返回结果的工程技术。总体而言,其实现逻辑如下: (注:示例图…...
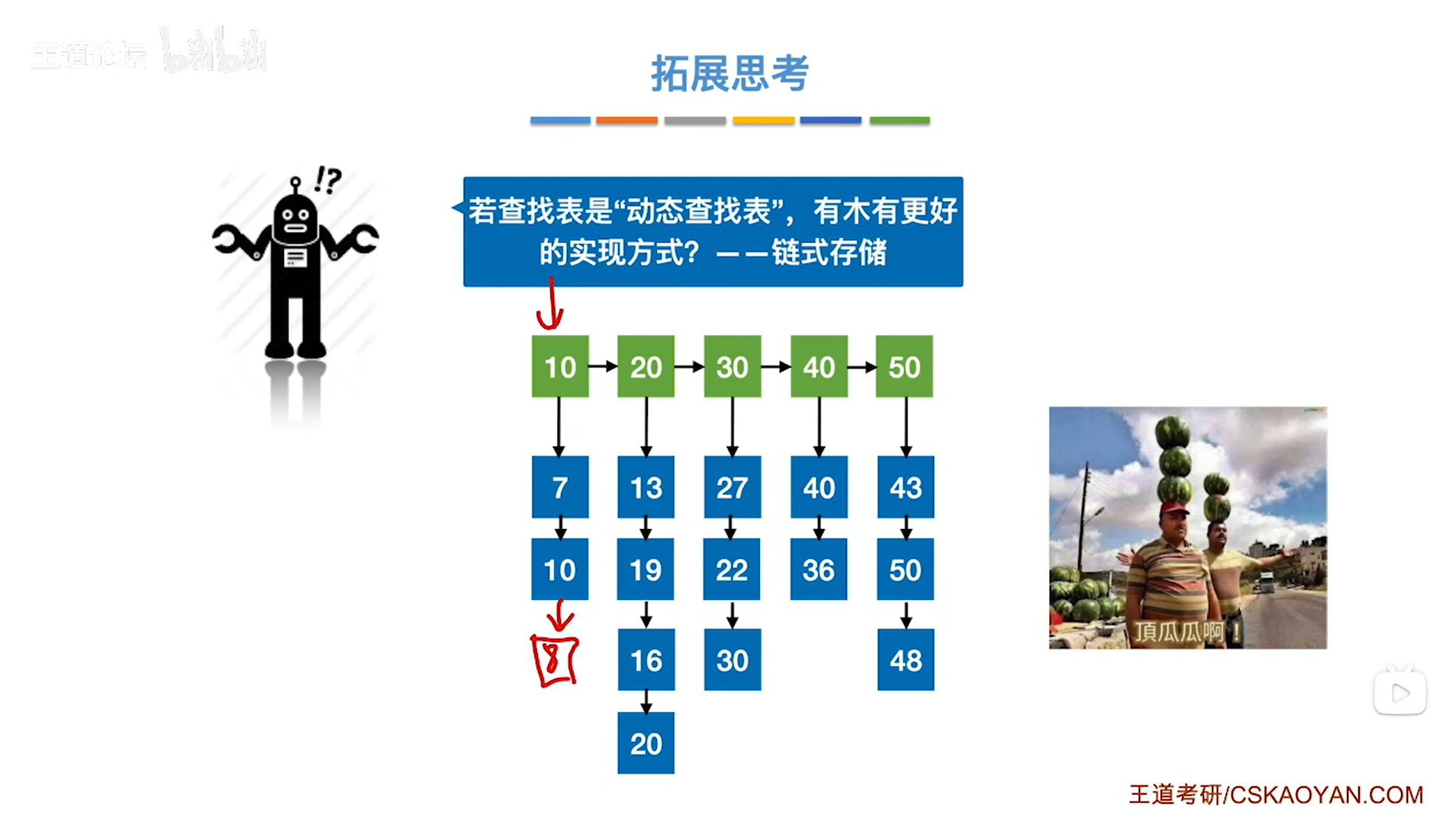
7.4.分块查找
一.分块查找的算法思想: 1.实例: 以上述图片的顺序表为例, 该顺序表的数据元素从整体来看是乱序的,但如果把这些数据元素分成一块一块的小区间, 第一个区间[0,1]索引上的数据元素都是小于等于10的, 第二…...
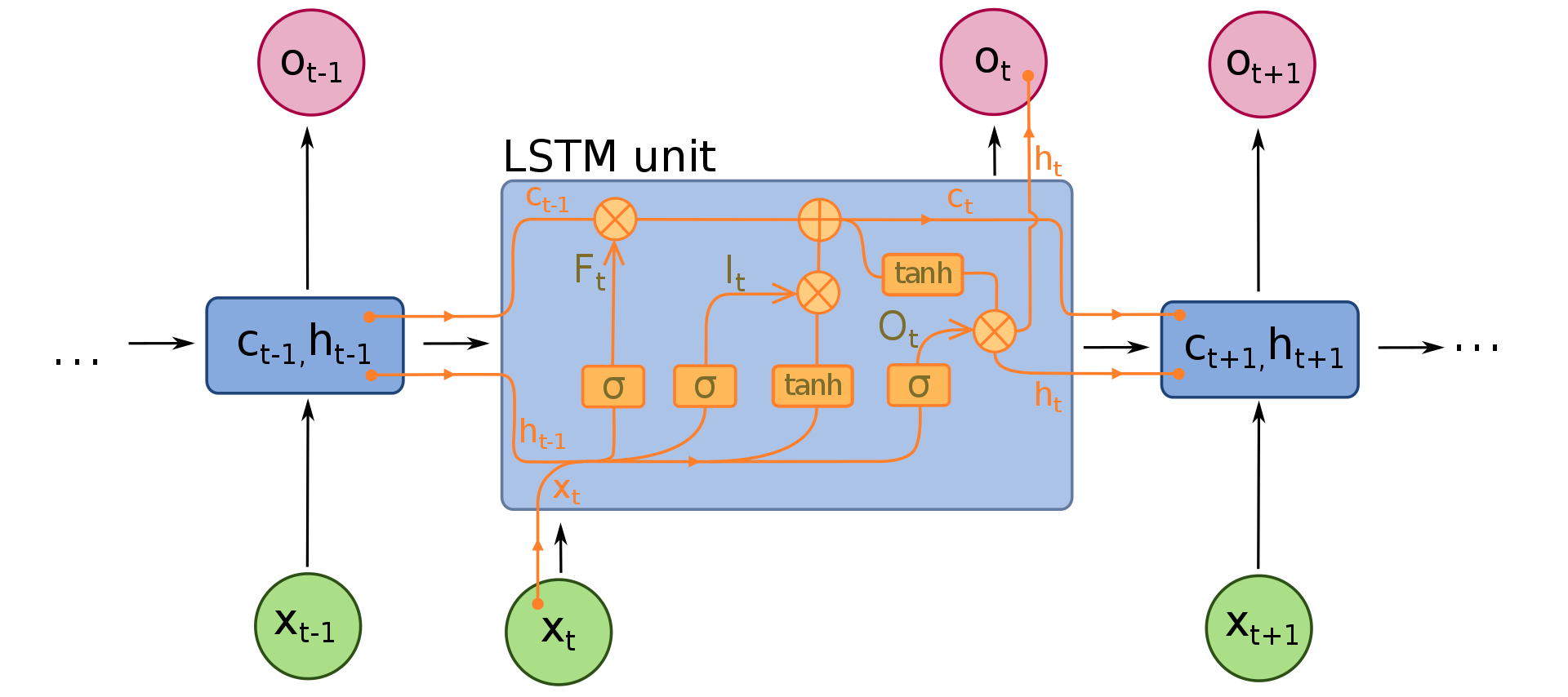
NLP学习路线图(二十三):长短期记忆网络(LSTM)
在自然语言处理(NLP)领域,我们时刻面临着处理序列数据的核心挑战。无论是理解句子的结构、分析文本的情感,还是实现语言的翻译,都需要模型能够捕捉词语之间依时序产生的复杂依赖关系。传统的神经网络结构在处理这种序列依赖时显得力不从心,而循环神经网络(RNN) 曾被视为…...
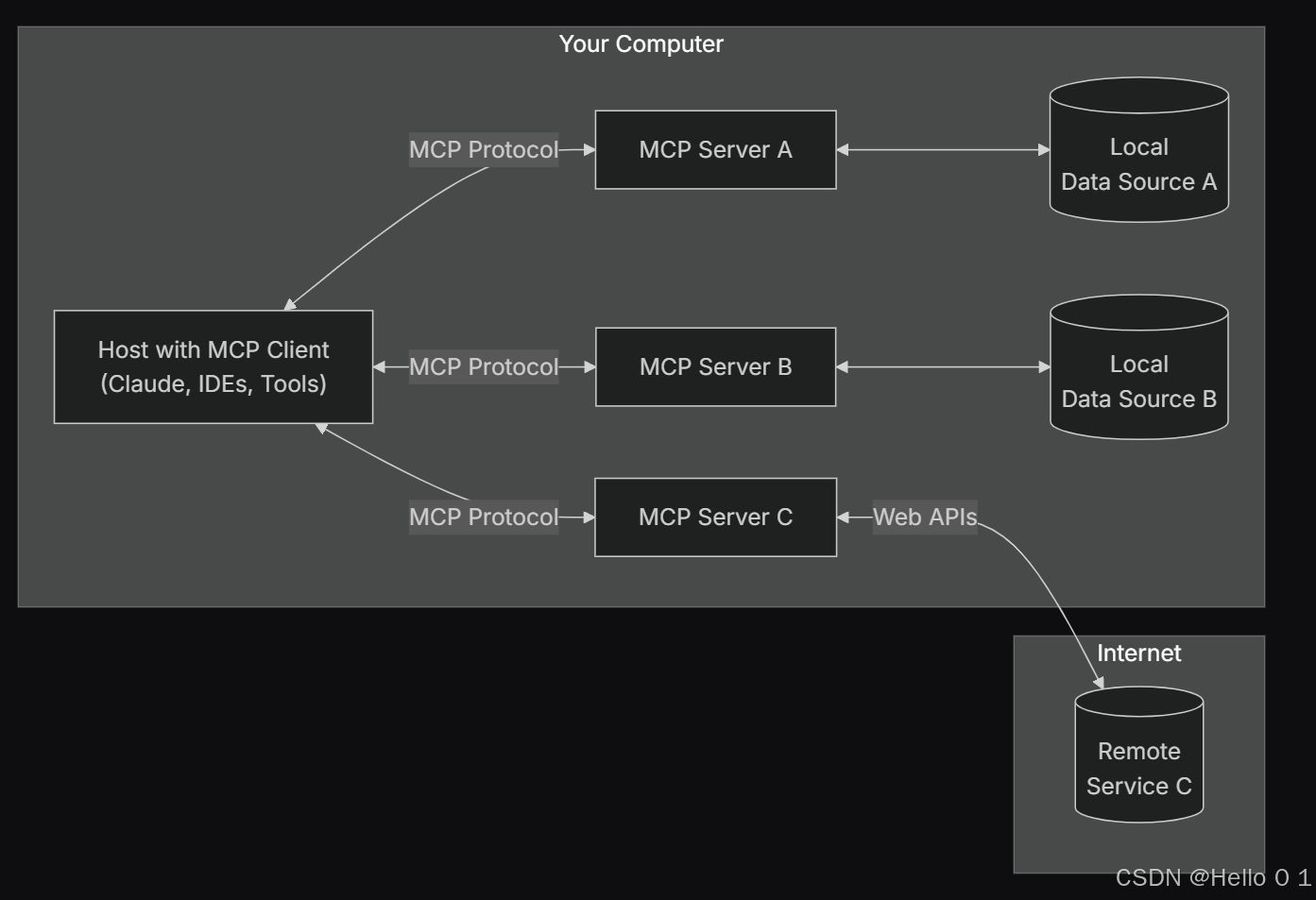
让AI看见世界:MCP协议与服务器的工作原理
让AI看见世界:MCP协议与服务器的工作原理 MCP(Model Context Protocol)是一种创新的通信协议,旨在让大型语言模型能够安全、高效地与外部资源进行交互。在AI技术快速发展的今天,MCP正成为连接AI与现实世界的重要桥梁。…...
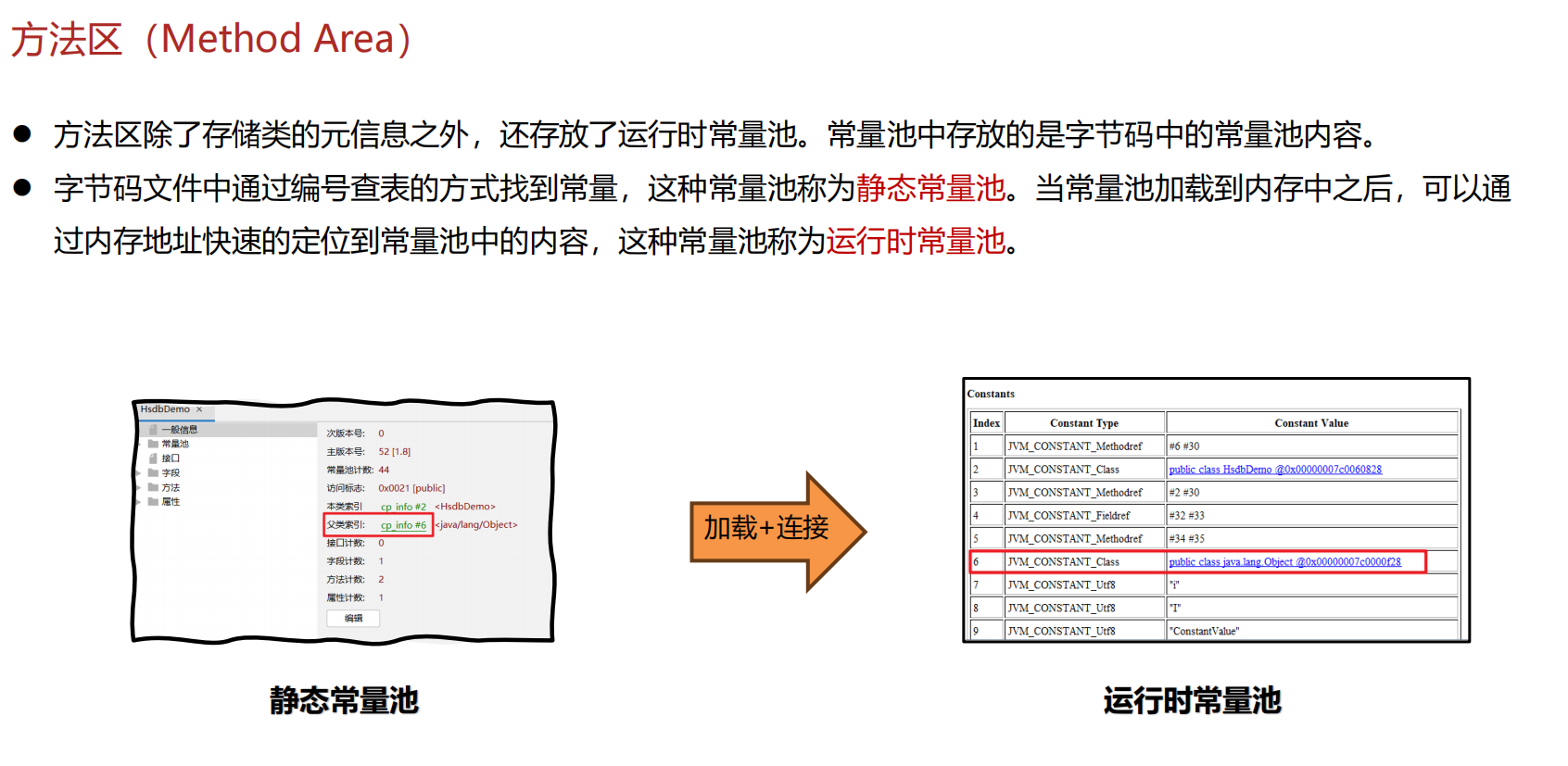
JVM 内存结构 详解
内存结构 运行时数据区: Java虚拟机在运行Java程序过程中管理的内存区域。 程序计数器: 线程私有,程序控制流的指示器,分支、循环、跳转、异常处理、线程恢复等基础功能都依赖这个计数器完成。 每个线程都有一个程序计数…...
MySQL 知识小结(一)
一、my.cnf配置详解 我们知道安装MySQL有两种方式来安装咱们的MySQL数据库,分别是二进制安装编译数据库或者使用三方yum来进行安装,第三方yum的安装相对于二进制压缩包的安装更快捷,但是文件存放起来数据比较冗余,用二进制能够更好管理咱们M…...
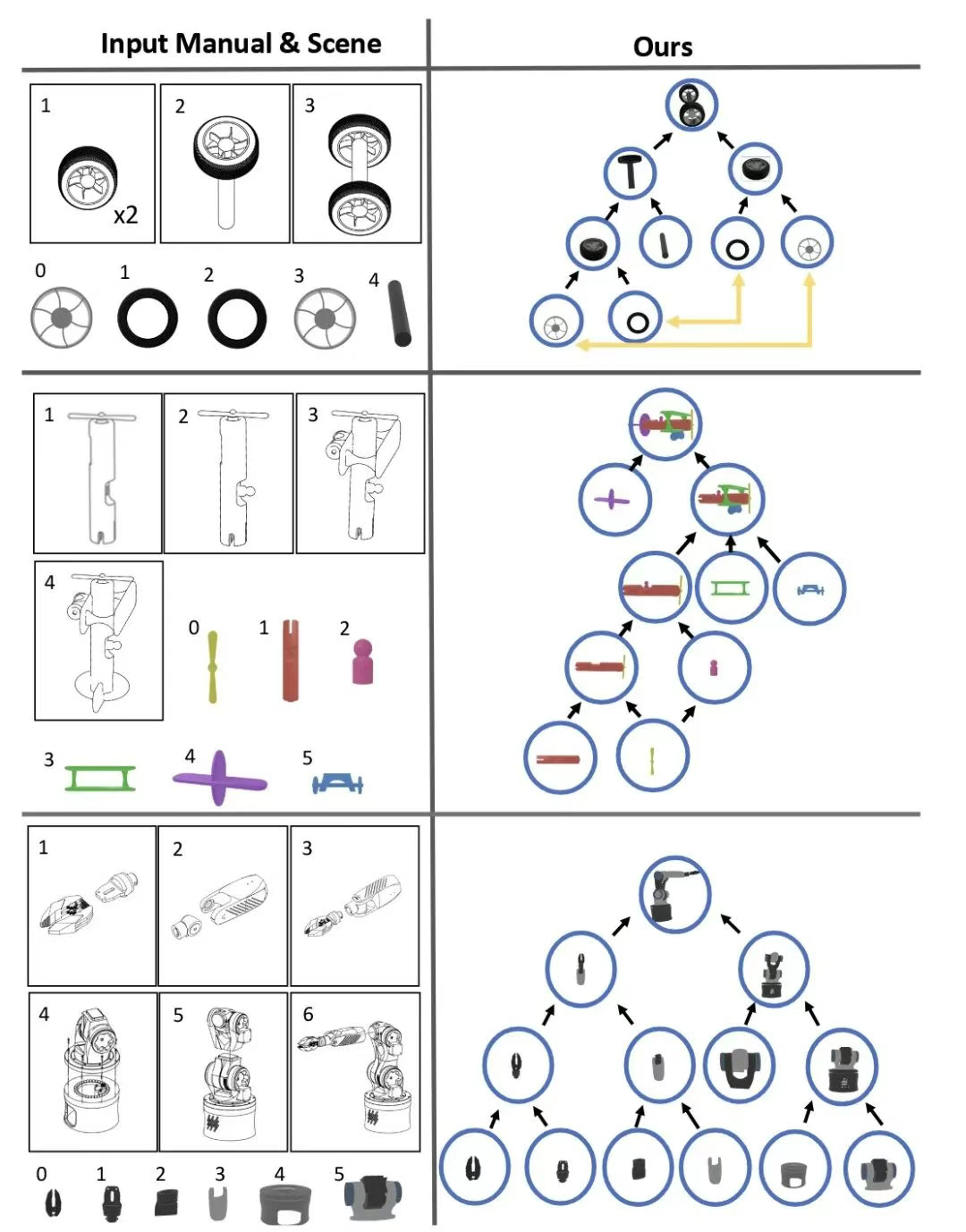
RSS 2025|从说明书学习复杂机器人操作任务:NUS邵林团队提出全新机器人装配技能学习框架Manual2Skill
视觉语言模型(Vision-Language Models, VLMs),为真实环境中的机器人操作任务提供了极具潜力的解决方案。 尽管 VLMs 取得了显著进展,机器人仍难以胜任复杂的长时程任务(如家具装配),主要受限于人…...

PostgreSQL——环境搭建
一、Linux # 安装 PostgreSQL 15 仓库 sudo dnf install -y https://download.postgresql.org/pub/repos/yum/reporpms/EL-$(rpm -E %{rhel})-x86_64/pgdg-redhat-repo-latest.noarch.rpm# 安装之前先确认是否已经存在PostgreSQL rpm -qa | grep postgres# 如果存在࿰…...
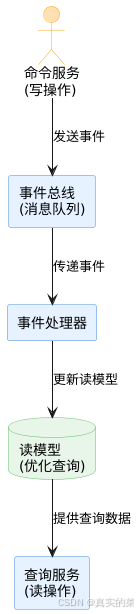
消息队列系统设计与实践全解析
文章目录 🚀 消息队列系统设计与实践全解析🔍 一、消息队列选型1.1 业务场景匹配矩阵1.2 吞吐量/延迟/可靠性权衡💡 权衡决策框架 1.3 运维复杂度评估🔧 运维成本降低策略 🏗️ 二、典型架构设计2.1 分布式事务最终一致…...
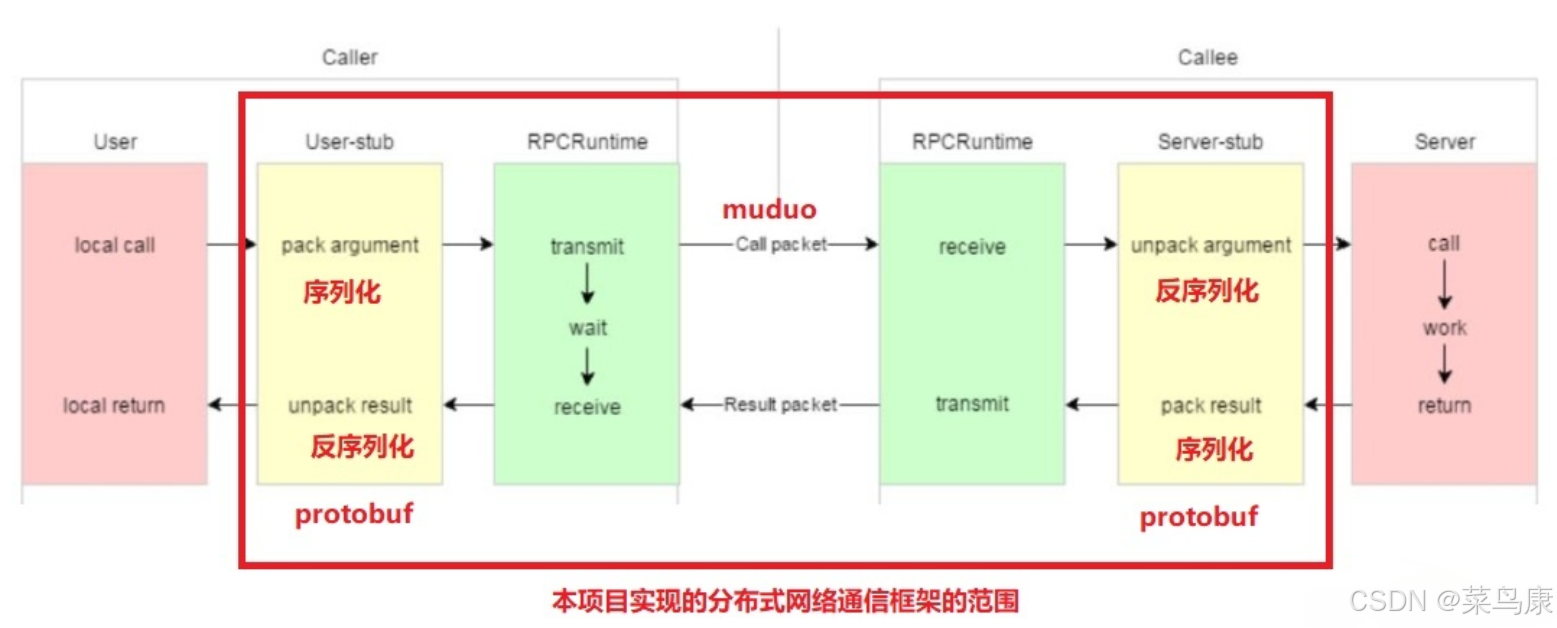
C++实现分布式网络通信框架RPC(2)——rpc发布端
有了上篇文章的项目的基本知识的了解,现在我们就开始构建项目。 目录 一、构建工程目录 二、本地服务发布成RPC服务 2.1理解RPC发布 2.2实现 三、Mprpc框架的基础类设计 3.1框架的初始化类 MprpcApplication 代码实现 3.2读取配置文件类 MprpcConfig 代码实现…...

6️⃣Go 语言中的哈希、加密与序列化:通往区块链世界的钥匙
Go 语言中的哈希、加密与序列化:通往区块链世界的钥匙 一、前言:离区块链还有多远? 区块链听起来可能遥不可及,似乎是只有密码学专家和资深工程师才能涉足的领域。但事实上,构建一个区块链的核心并不复杂,尤其当你已经掌握了一门系统编程语言,比如 Go。 要真正理解区…...