VMware虚拟机中ubuntu使用记录(6)—— 如何标定单目相机的内参(张正友标定法)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、张正友相机标定法
- 1. 工具的准备
- 2. 标定的步骤
- (1) 启动相机
- (2) 启动标定程序
- (3) 标定过程的操作
- (5)可能的报错
- 3. 标定文件内容解析
前言
张正友相机标定法是一种通过测量相机拍摄棋盘格上的特征点来计算相机内参和畸变参数的方法。这种标定方法简单易行,能够帮助恢复真实世界中的三维信息,提高图像处理和分析的准确性。在计算机视觉和机器视觉领域中具有重要应用价值。
一、张正友相机标定法
在ROS中已经集成了对相机完成标定以及畸变矫正的整个流程,直接在ros中调用即可。
1. 工具的准备
黑白棋盘格:
黑白棋盘格是由9×7的黑白格组成。在网上可以找到黑白相机棋盘格的pdf文档(需要的可以找我),下载之后将其打印在A3或者A4纸张上,然后量出其方格边长即可(自己量多少就写多少,单位换为国际单位m)。我使用的A4纸张,最终手动量出来A4的是0.0283m
2. 标定的步骤
(1) 启动相机
启动ROS
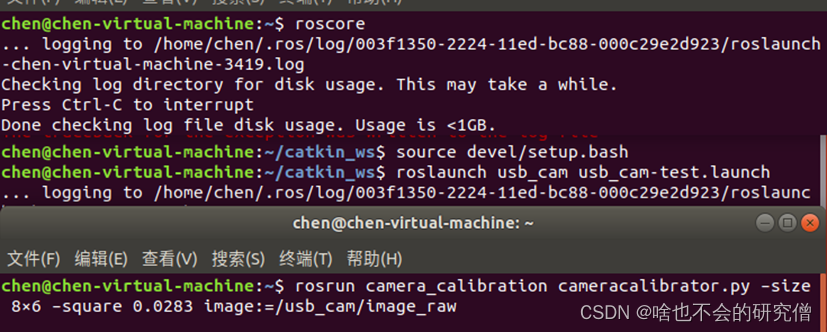
打开终端1输入: roscore
启动相机,在catkin_ws目录下
打开终端2输入:
source devel/setup.bash //已生效过环境,可跳过此步roslaunch usb_cam usb_cam-test.launch //usb_cam-test.launch为自己的文件名
(2) 启动标定程序
主目录(home)下打开终端3:
rosrun camera_calibration cameracalibrator.py –size 8×6 –square 0.0283 image:=/usb_cam/image_raw
整个指令输入过程的终端页面如下所示:
其中,
–size:是上述棋盘的宽度和高度
–square 0.0283:是棋盘的一个小方格的实际尺寸。按自己实际测量的即可,本次测量出来的是28.3毫米,故将square参数改为0.0283即可。
/usb_cam/image_raw:为自己相机的数据的话题
(3) 标定过程的操作
启动标定程序后,弹出以下窗口:
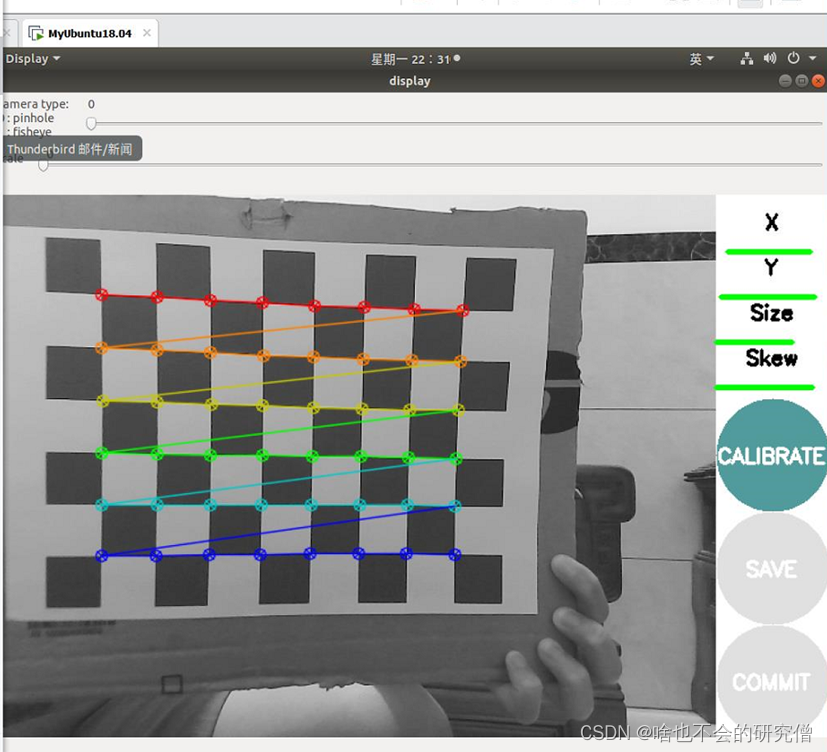
窗口的参数介绍:
X:表示标定板在视野中的左右位置。
Y:表示标定板在视野中的上下位置。
Size:标定板在占视野的尺寸大小,也可以理解为标定板离摄像头的远近。
Skew:标定板在视野中的倾斜位置
具体的操作过程:
- 标定过程中左右,上下,前后,对角方向前后倾斜标定板,这样使得右边X,Y,Size,Skew变成绿色
- X,Y,Size,Skew变成绿色后,CALIBRATE按钮变为蓝色,然后点击(等上半分钟左右)变为下面三个按钮都可以点击
- 依次点击SAVE(保存),点击SAVE之后:(‘Wrote calibration data to’, ‘/tmp/calibrationdata.tar.gz’),如下图所示:
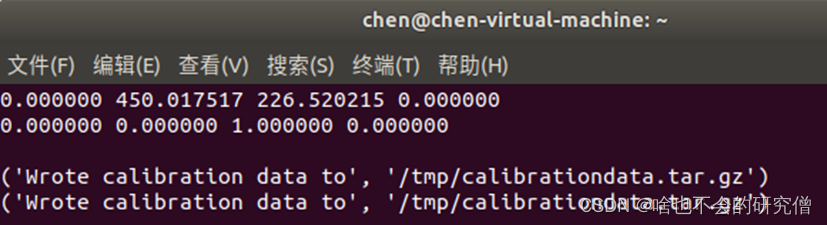
- COMMIT(提交)到相机配置文件中。即可将标定结果保存至本地。
(5)可能的报错
1)问题描述
如果第四步点击COMMIT出现如下报错:
service uri = self. get service uri(request) File
“/opt/ros/melodic/lib/python2.7/dist-packages/rospy/impl/tcpros
service.py”, line 470, in get service uri
raise serviceException(“service [%s] unavailable”%self.resolved name)
rospy.service.ServiceException: service [/camera/set camera info]unavailable
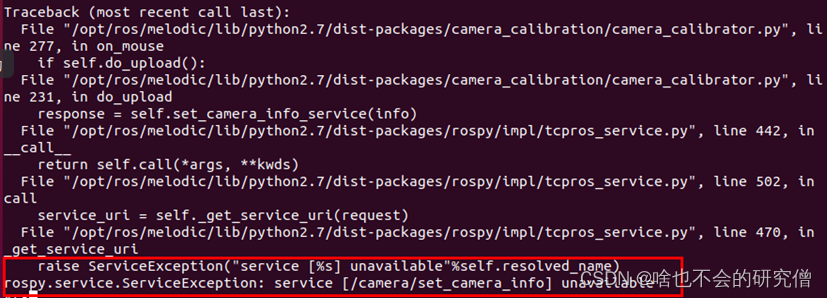
2) 解决方法
那么只能自行将标定参数移动至:~/.ros/camera_info,具体步骤如下
1.转移到标定文件的存放目录下:
cd /tmp
2.解压calibrationdata.tar.gz文件:
tar -zxvf calibrationdata.tar.gz
3.将ost.yaml复制到~/.ros/camera_info(若没有camera_info目录,创建一个即可)
4.将ost.yaml重命名为head_camera.yaml,并修改里面代码:
camera_name:head_camera
head_camera.yaml文件内容如下所示:
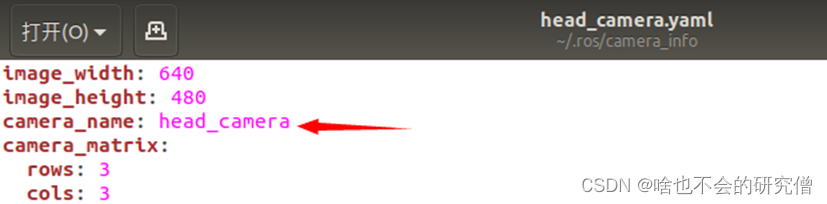
最后,使用上述参数的配置文件,重新运行相机的驱动,即可获得较为准确的图像数据
3. 标定文件内容解析
(1) 张正友标定法产生的相机配置文件里:
文件内容对应的参数如下:
camera_matrix:[fx 0 Cx,0 fy Cy,0 0 1]
Distortion_matrix:[k1,k2,p1,p2,k3]
相关文章:
VMware虚拟机中ubuntu使用记录(6)—— 如何标定单目相机的内参(张正友标定法)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、张正友相机标定法1. 工具的准备2. 标定的步骤(1) 启动相机(2) 启动标定程序(3) 标定过程的操作(5)可能的报错 3. 标定文件内容解析 前言 张正友相机标定法…...
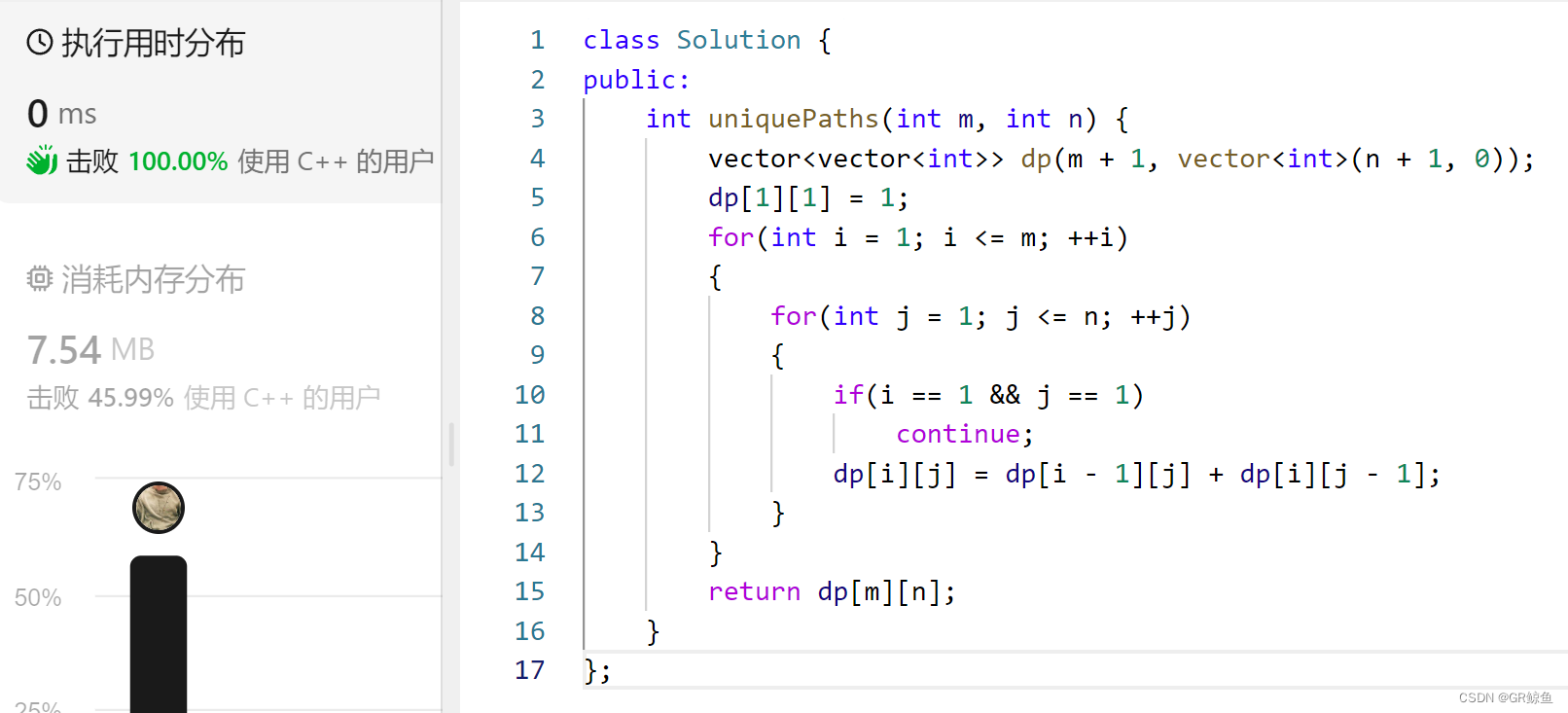
每日OJ题_记忆化搜索②_力扣62. 不同路径(三种解法)
目录 力扣62. 不同路径 解析代码1_暴搜递归(超时) 解析代码2_记忆化搜索 解析代码3_动态规划 力扣62. 不同路径 62. 不同路径 难度 中等 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。 机器…...
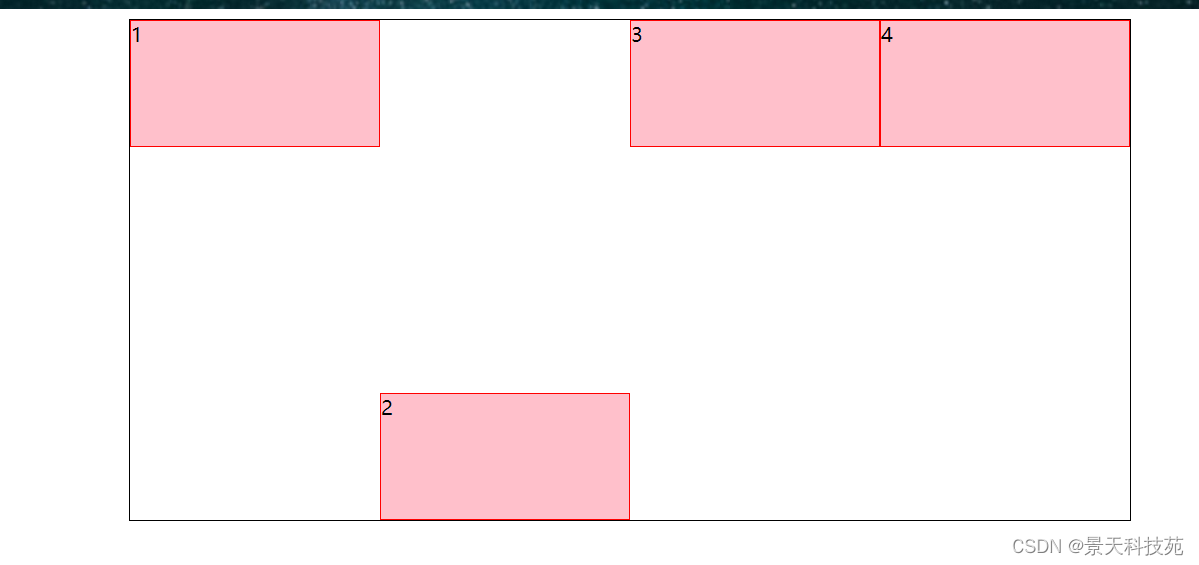
【微信小程序开发】微信小程序、大前端之flex布局方式详细解析
✨✨ 欢迎大家来到景天科技苑✨✨ 🎈🎈 养成好习惯,先赞后看哦~🎈🎈 🏆 作者简介:景天科技苑 🏆《头衔》:大厂架构师,华为云开发者社区专家博主,…...
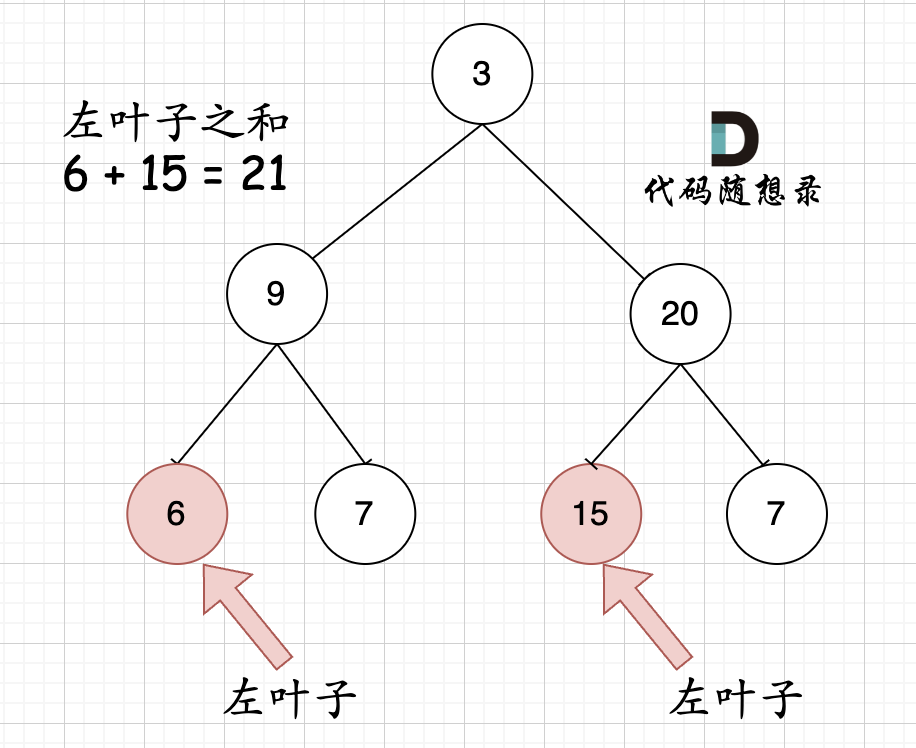
代码随想录算法训练营第二十天:二叉树成长
代码随想录算法训练营第二十天:二叉树成长 110.平衡二叉树 力扣题目链接(opens new window) 给定一个二叉树,判断它是否是高度平衡的二叉树。 本题中,一棵高度平衡二叉树定义为:一个二叉树每个节点 的左右两个子树的高度差的绝…...

Opensbi初始化分析:设备初始化-warmboot
Opensbi初始化分析:设备初始化-warmboot 设备初始化sbi_init函数init_warmboot函数coolboot & warmbootwait_for_coldboot函数domain && scratch(coldboot所特有)console初始化及print相关工作(coldboot所特有)系统调用的相关初始化(coldboot所特有)综上设备…...
)
软考 系统架构设计师系列知识点之软件可靠性基础知识(13)
接前一篇文章:软考 系统架构设计师系列知识点之软件可靠性基础知识(12) 所属章节: 第9章. 软件可靠性基础知识 第3节 软件可靠性管理 为了进一步提高软件可靠性,人们又提出了软件可靠性管理的概念,把软件可…...
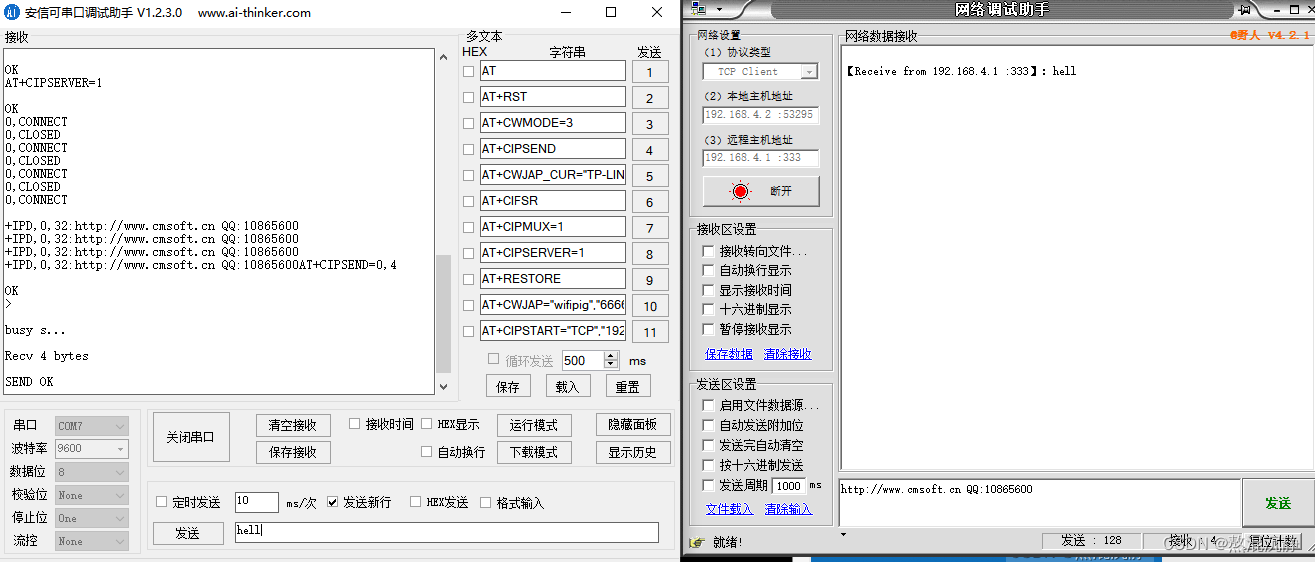
将ESP工作为AP路由模式并当成服务器
将ESP8266模块通过usb转串口接入电脑 ATCWMODE3 //1.配置成双模ATCIPMUX1 //2.使能多链接ATCIPSERVER1 //3.建立TCPServerATCIPSEND0,4 //4.发送4个字节在链接0通道上 >ATCIPCLOSE0 //5.断开连接通过wifi找到安信可的wifi信号并连接 连接后查看自己的ip地址变为192.168.4.…...
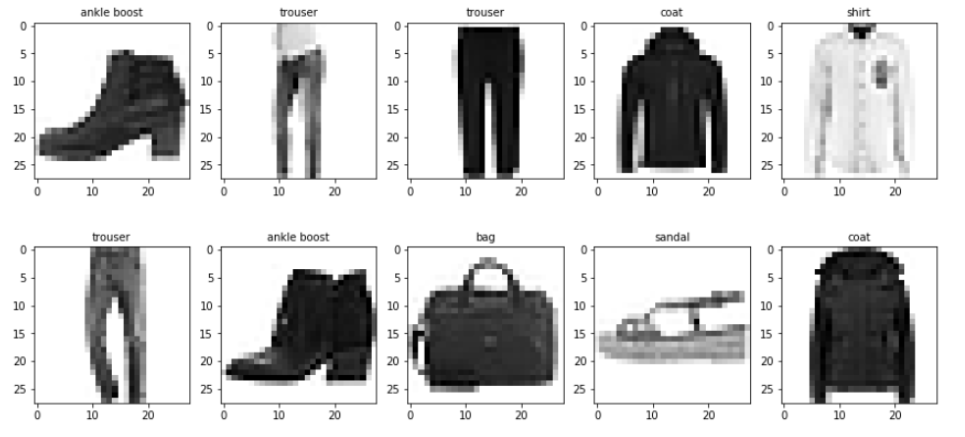
Python深度学习基于Tensorflow(6)神经网络基础
文章目录 使用Tensorflow解决XOR问题激活函数正向传播和反向传播解决过拟合权重正则化Dropout正则化批量正则化 BatchNormal权重初始化残差连接 选择优化算法传统梯度更新算法动量算法NAG算法AdaGrad算法RMSProp算法Adam算法如何选择优化算法 使用tf.keras构建神经网络使用Sequ…...
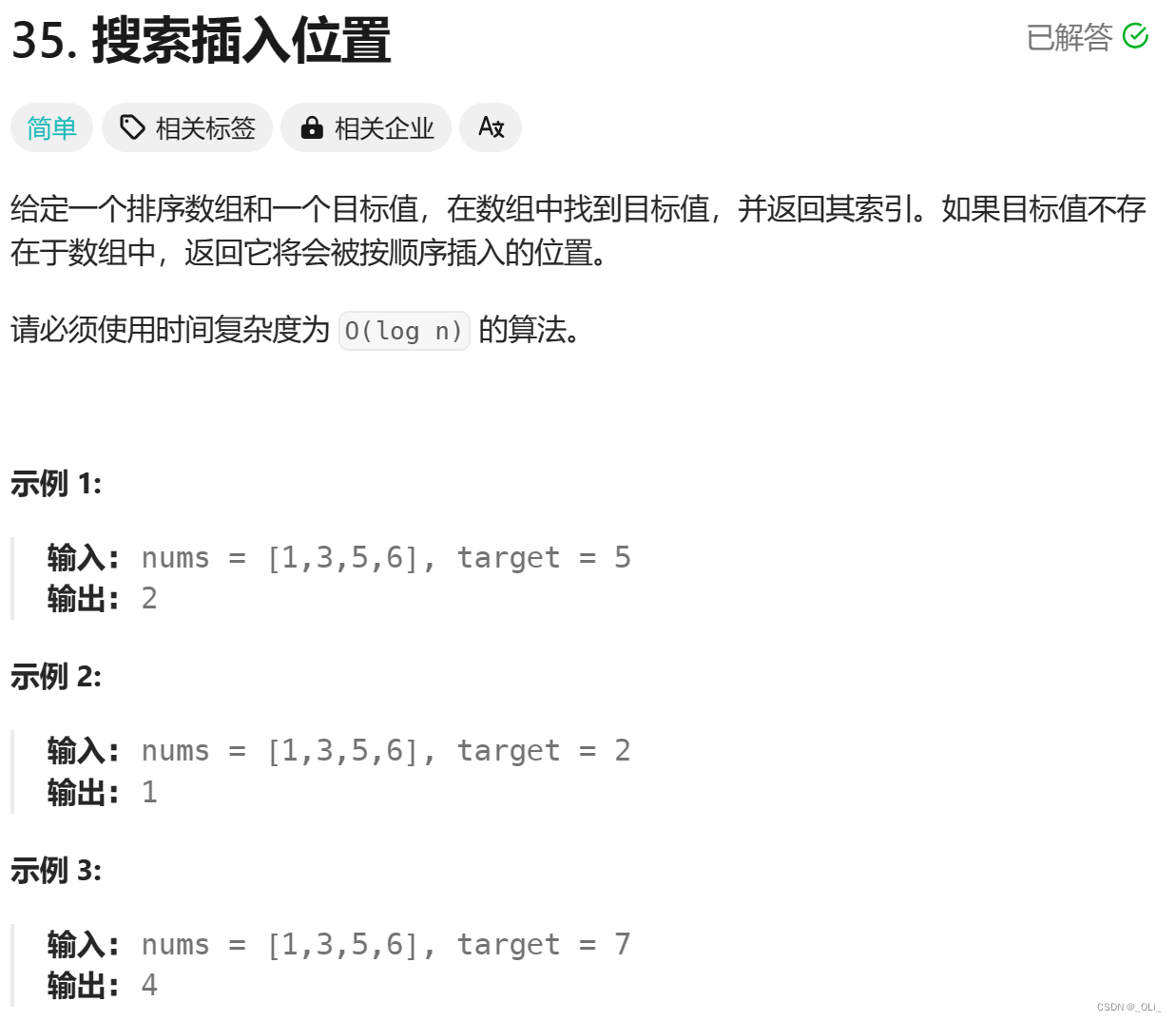
力扣HOT100 - 35. 搜索插入位置
解题思路: 二分法模板 class Solution {public int searchInsert(int[] nums, int target) {int left 0;int right nums.length - 1;while (left < right) {int mid left ((right - left) >> 1);if (nums[mid] target)return mid;else if (nums[mid…...

MinimogWP WordPress 主题下载——优雅至上,功能无限
无论你是个人博客写手、创意工作者还是企业站点的管理员,MinimogWP 都将成为你在 WordPress 平台上的理想之选。以其优雅、灵活和功能丰富而闻名,MinimogWP 不仅提供了令人惊叹的外观,还为你的网站带来了无限的创作和定制可能性。 无与伦比的…...
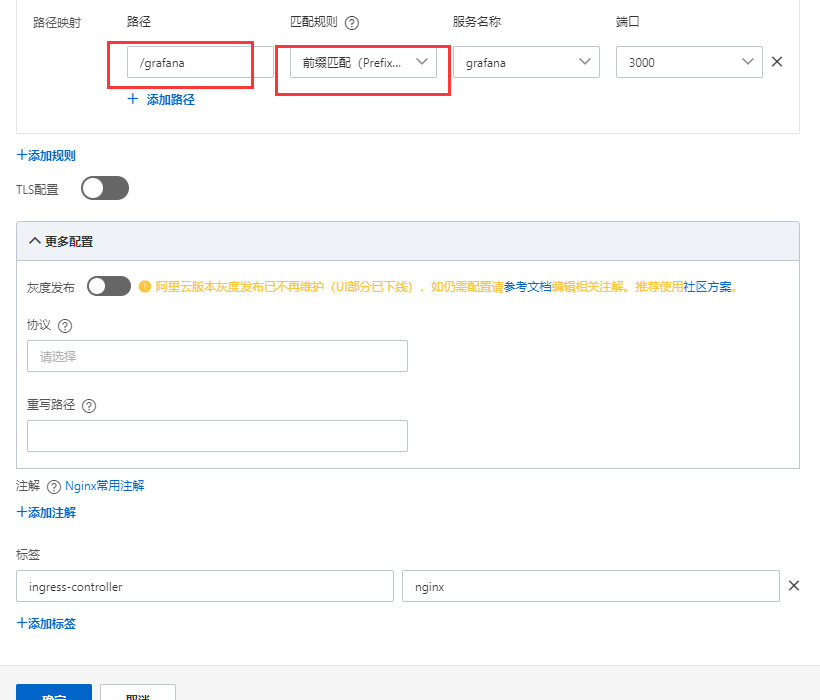
kube-prometheus部署到 k8s 集群
文章目录 **修改镜像地址****访问配置****修改 Prometheus 的 service****修改 Grafana 的 service****修改 Alertmanager 的 service****安装****Prometheus验证****Alertmanager验证****Grafana验证****卸载****Grafana显示时间问题** 或者配置ingress添加ingress访问grafana…...
从0开始学习python(六)
目录 前言 1、循环结构 1.1 遍历循环结构for 1.2 无限循环结构while 总结 前言 上一篇文章我们讲到了python的顺序结构和分支结构。这一章继续往下讲。 1、循环结构 在python中,循环结构分为两类,一类是遍历循环结构for,一类是无限循环结…...
OpenGL 入门(三)—— OpenGL 与 OpenCV 共同打造大眼滤镜
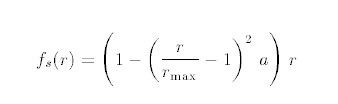
从本篇开始,会在上一篇搭建的滤镜框架的基础上,介绍具体的滤镜效果该如何制作。本篇会先介绍大眼滤镜,先来看一下效果,原图如下: 使用手机后置摄像头对眼部放大后的效果: 制作大眼滤镜所需的主要知识点&…...
Linux服务器安全基础 - 查看入侵痕迹
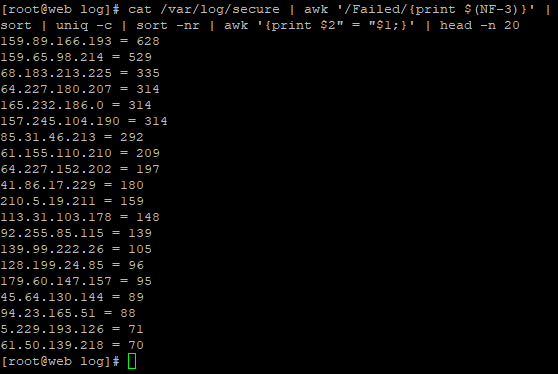
1. 常见系统日志 /var/log/cron 记录了系统定时任务相关的日志 /var/log/dmesg 记录了系统在开机时内核自检的信息,也可以使用dmesg命令直接查看内核自检信息 /var/log/secure:记录登录系统存取数据的文件;例如:pop3,ssh,telnet,ftp等都会记录在此. /var/log/btmp:记…...

Java反射机制的实战应用:探索其魅力与局限
引言 Java作为一种面向对象的编程语言,其灵活性和强大的功能使其成为众多开发者的首选。而Java反射机制作为Java语言中的一项重要特性,为程序员提供了一种在运行时检查和操作类、方法、属性等信息的能力。本文旨在深入探讨Java反射机制的实战应用&#…...

vue3项目 文件组成
从头捋顺一遍vue3项目文件目录 前置知识JS模块化什么是依赖?安装依赖webpack能做什么?vue基本使用 不借助vue-cli,从0开始搭建vue项目。index.html、main.js、App.vue引入npm引入webpack引入babel引入vue-loaderwebpack配置webpack配置 前置知…...

C语言关键字 typedef 的功能是什么?
一、问题 语⾔有 32 个关键字,其中 int 的功能是声明整型变量,struct 的功能是声明结构体变量,那么 typedef 的功能是什么呢? 二、解答 1. typedef 的功能 在 C 语⾔中除了可以使⽤标准类型名(如 int、 char、float …...

【YoloDeployCsharp】基于.NET Framework的YOLO深度学习模型部署测试平台-源码下载与项目配置
基于.NET Framework 4.8 开发的深度学习模型部署测试平台,提供了YOLO框架的主流系列模型,包括YOLOv8~v9,以及其系列下的Det、Seg、Pose、Obb、Cls等应用场景,同时支持图像与视频检测。模型部署引擎使用的是OpenVINO™、TensorRT、ONNX runtime以及OpenCV DNN,支持CPU、IGP…...

如何在 Ubuntu 12.04 VPS 上使用 MongoDB 创建分片集群
简介 MongoDB 是一个 NoSQL 文档数据库系统,可以在水平方向上很好地扩展,并通过键值系统实现数据存储。作为 Web 应用程序和网站的热门选择,MongoDB 易于实现并可以通过编程方式访问。 MongoDB 通过一种称为“分片”的技术实现扩展。分片是将…...
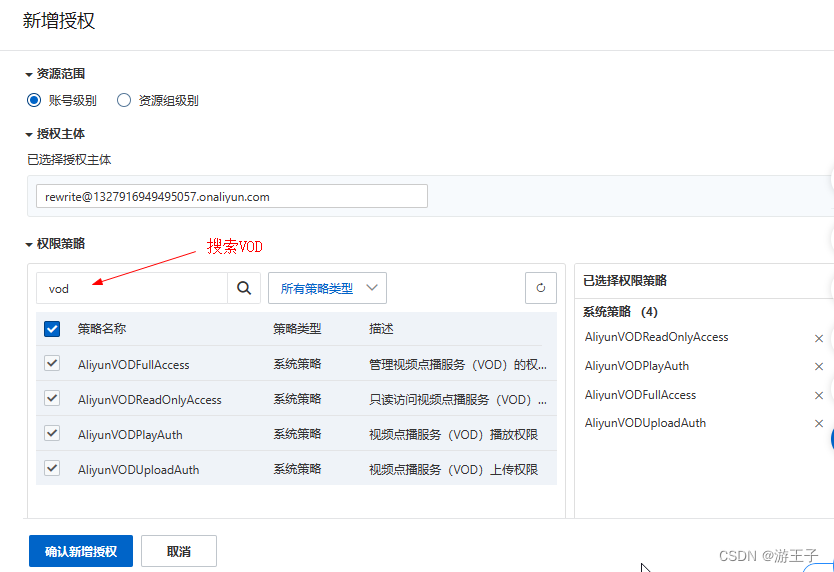
阿里云VOD视频点播流程(1)
一、开通阿里云VOD 视频点播(ApsaraVideo VoD,简称VOD)是集视频采集、编辑、上传、媒体资源管理、自动化转码处理、视频审核分析、分发加速于一体的一站式音视频点播解决方案。登录阿里云,在产品找到视频点播VOD ,点击…...

在HarmonyOS ArkTS ArkUI-X 5.0及以上版本中,手势开发全攻略:
在 HarmonyOS 应用开发中,手势交互是连接用户与设备的核心纽带。ArkTS 框架提供了丰富的手势处理能力,既支持点击、长按、拖拽等基础单一手势的精细控制,也能通过多种绑定策略解决父子组件的手势竞争问题。本文将结合官方开发文档,…...

oracle与MySQL数据库之间数据同步的技术要点
Oracle与MySQL数据库之间的数据同步是一个涉及多个技术要点的复杂任务。由于Oracle和MySQL的架构差异,它们的数据同步要求既要保持数据的准确性和一致性,又要处理好性能问题。以下是一些主要的技术要点: 数据结构差异 数据类型差异ÿ…...
:滤镜命令)
ffmpeg(四):滤镜命令
FFmpeg 的滤镜命令是用于音视频处理中的强大工具,可以完成剪裁、缩放、加水印、调色、合成、旋转、模糊、叠加字幕等复杂的操作。其核心语法格式一般如下: ffmpeg -i input.mp4 -vf "滤镜参数" output.mp4或者带音频滤镜: ffmpeg…...

成都鼎讯硬核科技!雷达目标与干扰模拟器,以卓越性能制胜电磁频谱战
在现代战争中,电磁频谱已成为继陆、海、空、天之后的 “第五维战场”,雷达作为电磁频谱领域的关键装备,其干扰与抗干扰能力的较量,直接影响着战争的胜负走向。由成都鼎讯科技匠心打造的雷达目标与干扰模拟器,凭借数字射…...

Mac下Android Studio扫描根目录卡死问题记录
环境信息 操作系统: macOS 15.5 (Apple M2芯片)Android Studio版本: Meerkat Feature Drop | 2024.3.2 Patch 1 (Build #AI-243.26053.27.2432.13536105, 2025年5月22日构建) 问题现象 在项目开发过程中,提示一个依赖外部头文件的cpp源文件需要同步,点…...
Netty从入门到进阶(二)
二、Netty入门 1. 概述 1.1 Netty是什么 Netty is an asynchronous event-driven network application framework for rapid development of maintainable high performance protocol servers & clients. Netty是一个异步的、基于事件驱动的网络应用框架,用于…...
计算机基础知识解析:从应用到架构的全面拆解
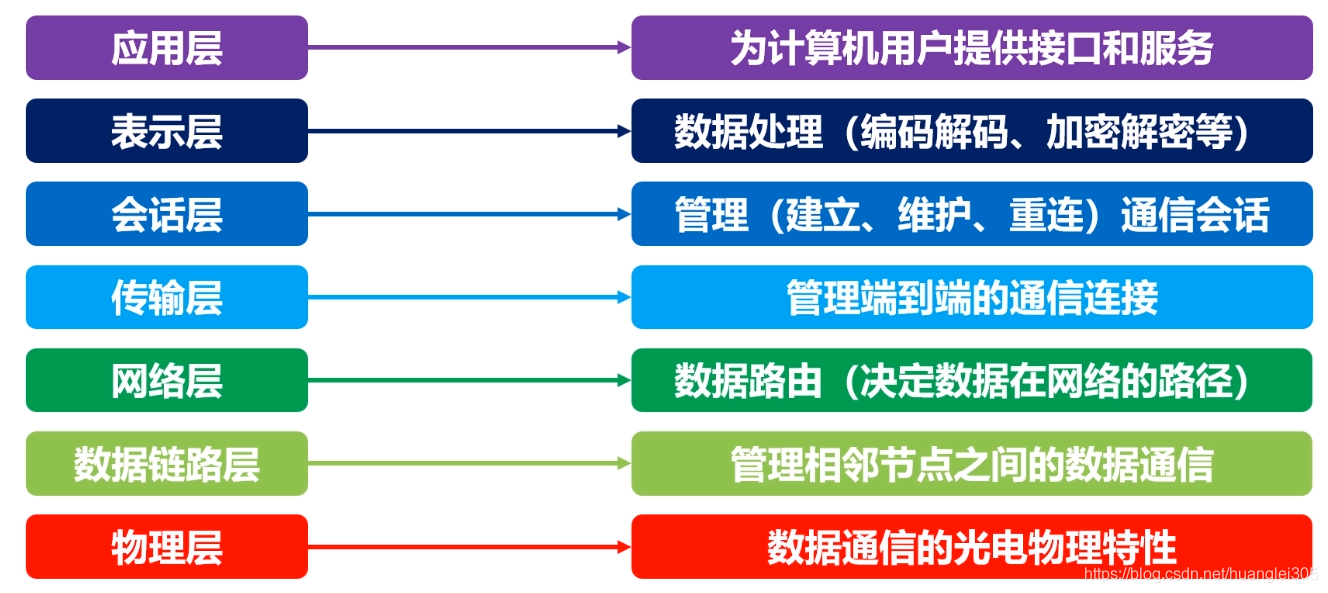
目录 前言 1、 计算机的应用领域:无处不在的数字助手 2、 计算机的进化史:从算盘到量子计算 3、计算机的分类:不止 “台式机和笔记本” 4、计算机的组件:硬件与软件的协同 4.1 硬件:五大核心部件 4.2 软件&#…...
Golang——9、反射和文件操作
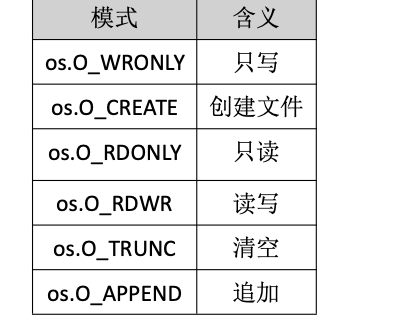
反射和文件操作 1、反射1.1、reflect.TypeOf()获取任意值的类型对象1.2、reflect.ValueOf()1.3、结构体反射 2、文件操作2.1、os.Open()打开文件2.2、方式一:使用Read()读取文件2.3、方式二:bufio读取文件2.4、方式三:os.ReadFile读取2.5、写…...

【学习笔记】erase 删除顺序迭代器后迭代器失效的解决方案
目录 使用 erase 返回值继续迭代使用索引进行遍历 我们知道类似 vector 的顺序迭代器被删除后,迭代器会失效,因为顺序迭代器在内存中是连续存储的,元素删除后,后续元素会前移。 但一些场景中,我们又需要在执行删除操作…...

Ubuntu系统复制(U盘-电脑硬盘)
所需环境 电脑自带硬盘:1块 (1T) U盘1:Ubuntu系统引导盘(用于“U盘2”复制到“电脑自带硬盘”) U盘2:Ubuntu系统盘(1T,用于被复制) !!!建议“电脑…...