三维重建(单目、双目、多目、点云、SFM、SLAM)
- 1 相机几何与标定
- 1.1 相机模型中的坐标系
- 1.2 四种坐标系之间的转换
- 1.3 相机内参
- 1.4 相机标定
- 2 单目三维重建
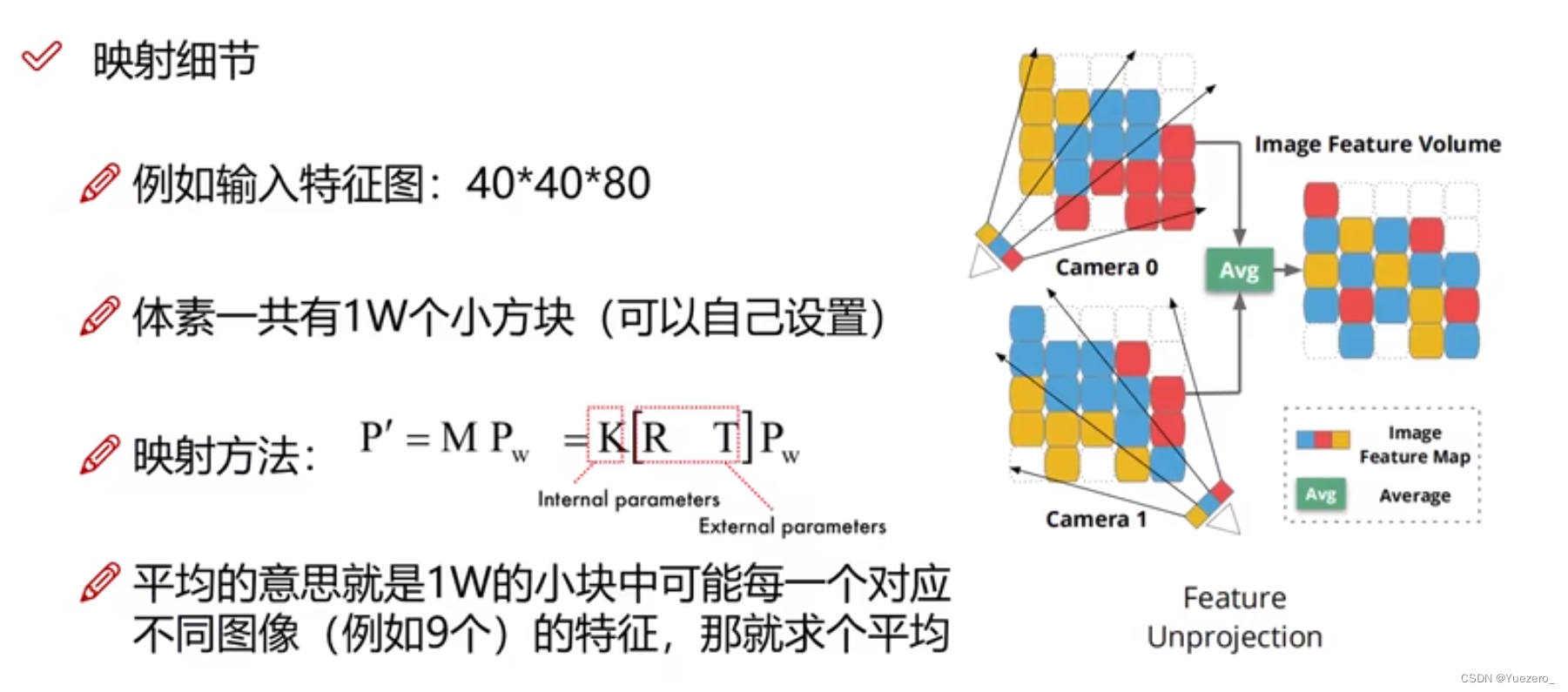
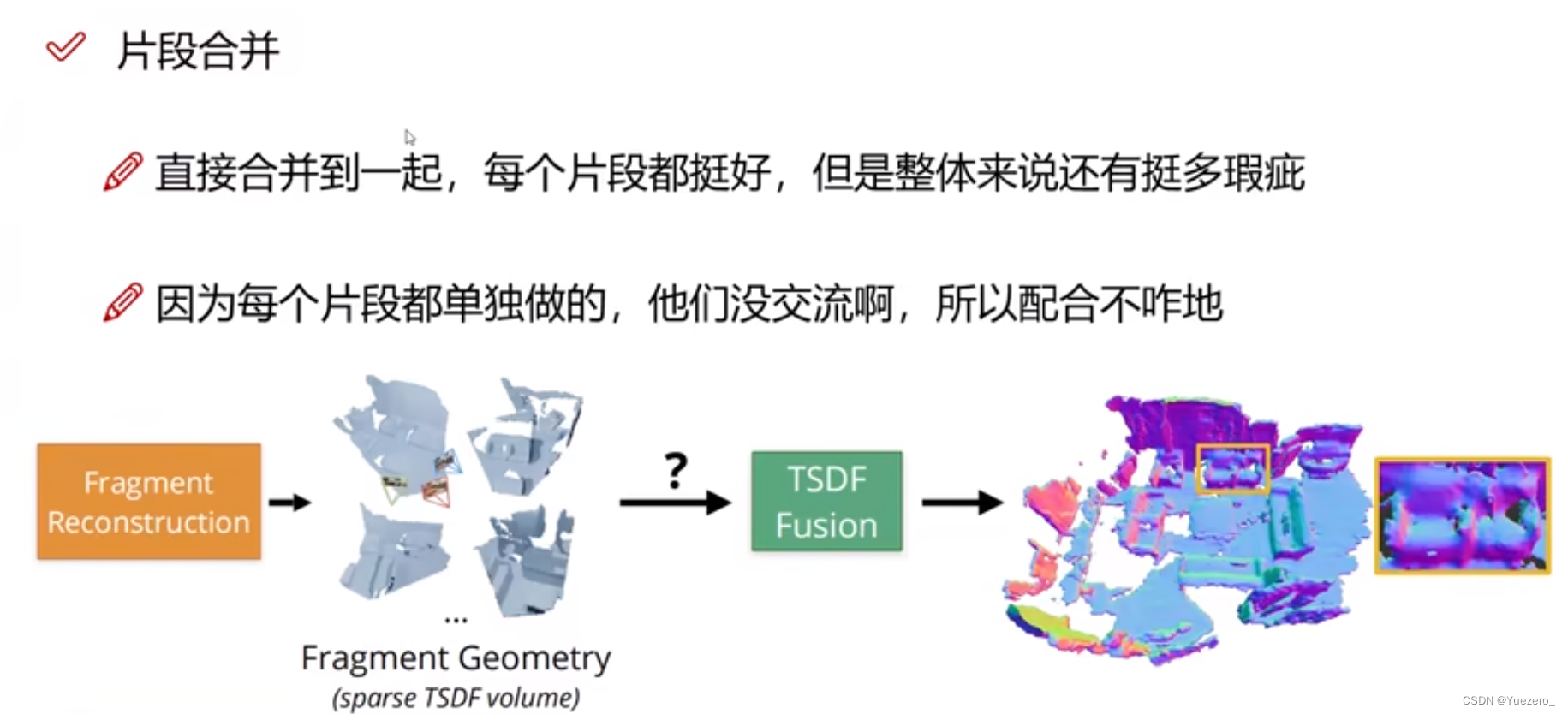
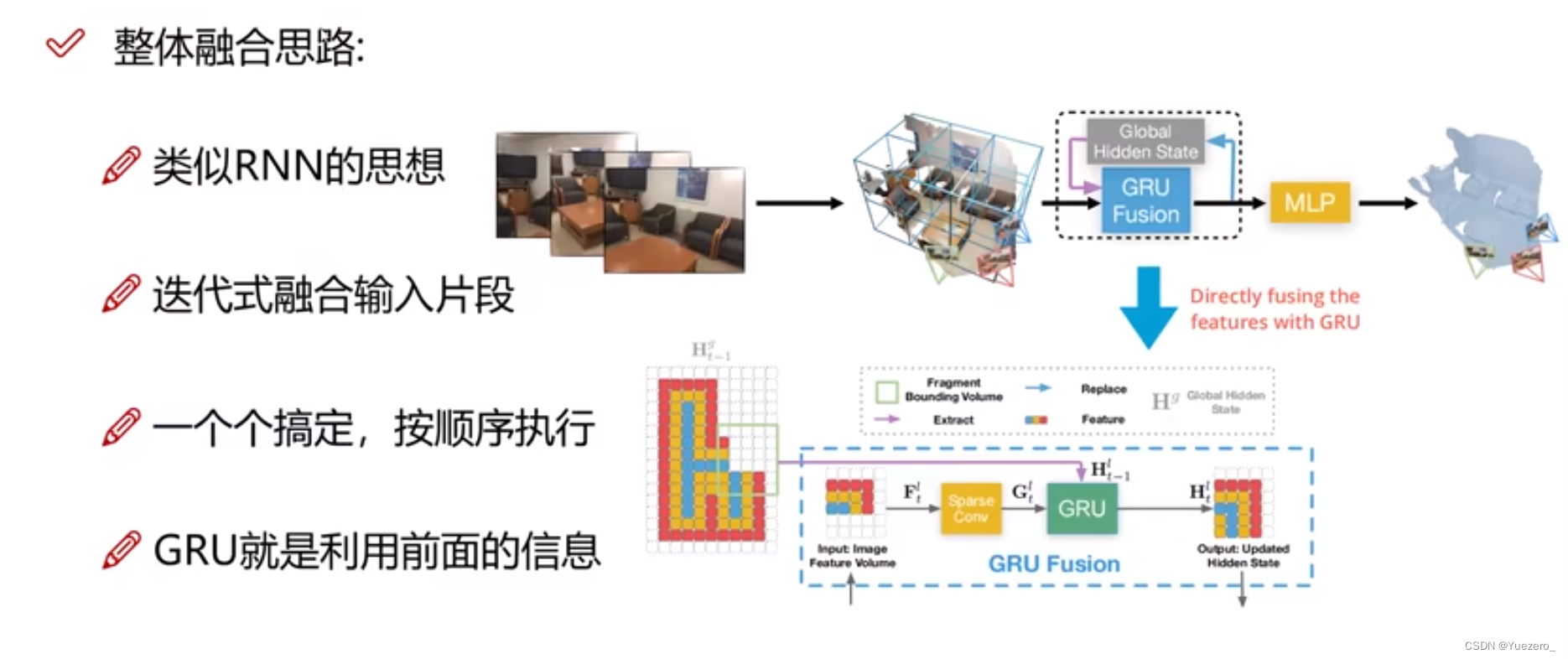
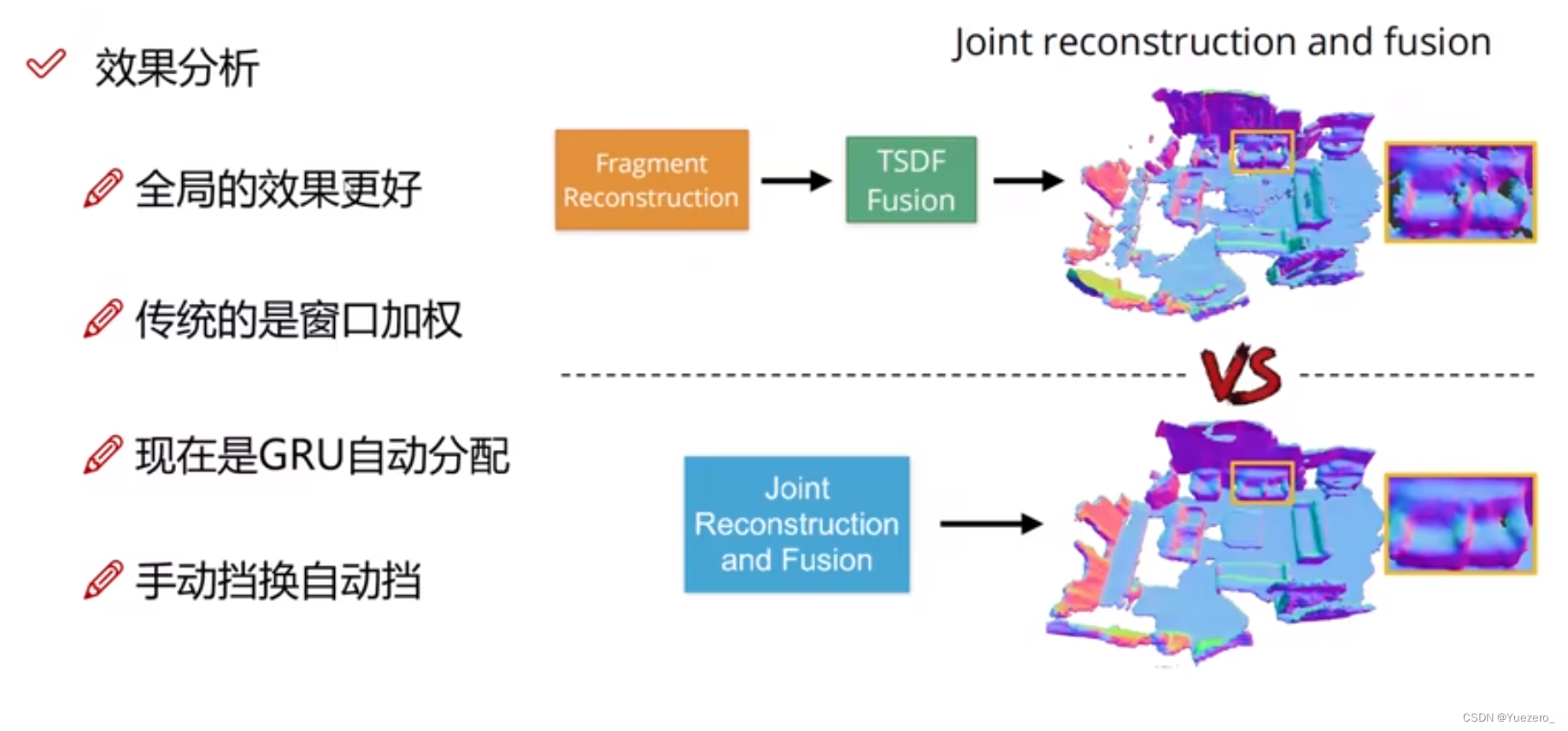
- 2.1 NeuralRecon
三维重建定义
在计算机视觉中, 三维重建是指根据单视图或者多视图的图像重建三维信息的过程. 由于单视频的信息不完全,因此三维重建需要利用经验知识. 而多视图的三维重建(类似人的双目定位)相对比较容易, 其方法是先对摄像机进行标定, 即计算出摄像机的图象坐标系与世界坐标系的关系.然后利用多个二维图象中的信息重建出三维信息。
常见的三维重建表达方式
常规的3D shape representation有以下四种:深度图(depth)、点云(point cloud)、体素(voxel)、网格(mesh)。
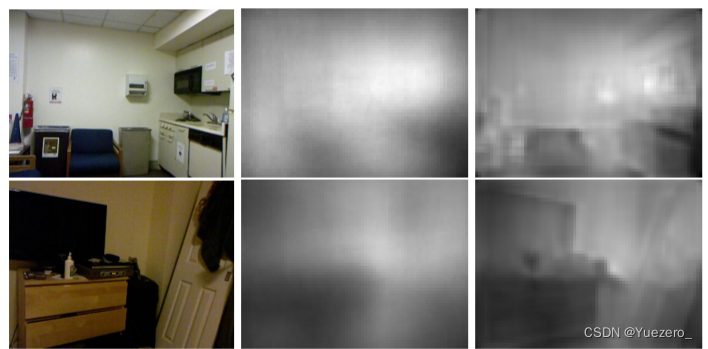
RGB-D深度图的D通道每个像素值代表的是物体到相机xy平面的距离,单位为 mm,由深度摄像头获取。
Point Cloud点云是某个坐标系下的点的数据集。点包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等等。在我看来点云可以将现实世界原子化,通过高精度的点云数据可以还原现实世界。万物皆点云,由三维激光雷达获取。

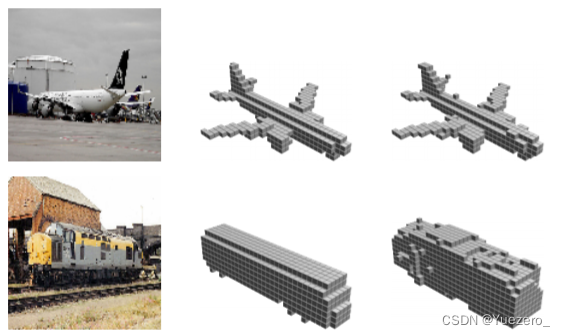
体素是三维空间中的一个有大小的点,一个小方块,相当于是三维空间种的像素。
三角网格就是全部由三角形组成的多边形网格。多边形和三角网格在图形学和建模中广泛使用,用来模拟复杂物体的表面,如建筑、车辆、人体,当然还有茶壶等。任意多边形网格都能转换成三角网格。

三维重建的分类
根据采集设备是否主动发射测量信号,分为两类:基于主动视觉理论和基于被动视觉的三维重建方法。
主动视觉三维重建方法:主要包括结构光法和激光扫描法。
被动视觉三维重建方法:被动视觉只使用二维图像,根据图像的纹理分布等信息恢复深度信息,进而实现三维重建。
其中,双目视觉和多目视觉理论上可精确恢复深度信息,但实际中,受拍摄条件的影响,精度无法得到保证。单目视觉只使用单一摄像机作为采集设备,具有低成本、易部署等优点,但其存在固有的问题:单张图像可能对应无数真实物理世界场景(病态),故使用单目视觉方法从图像中估计深度进而实现三维重建的难度较大。
有前景的方向:基于SFM的运动恢复结构、基于Deep learning的深度估计和结构重建,基于RGB-D深度摄像头的三维重建、基于点云的三维重建
SFM(Structure From Motion),主要基于多视觉几何原理,用于从运动中实现3D重建,也就是从无时间序列的2D图像中推算出三维场景结构,是计算机视觉学科的重要分支,广泛应用于AR/VR、自动驾驶等领域。SFM是一个估计相机参数及三维点位置的问题,根据SfM过程中图像添加顺序的拓扑结构,SfM方法可以分为增量式、全局式、混合式、层次式、基于语义的SFM和基于深度学习的SFM。
1 相机几何与标定
1.1 相机模型中的坐标系
针孔相机模型存在4个坐标系:世界坐标系、摄像机坐标系、图像物理坐标系和图像像素坐标系。
光心:图像的中心。
光轴:穿过图像的光心,与图像平面垂直的轴。
- 世界坐标系(x,y,z):是客观三维世界的绝对坐标系,也称客观坐标系,就是物体在真实世界中的坐标,世界坐标系是随着物体的大小和位置变化的,单位是长度单位
- 相机坐标系(x’,y’):以
相机的光心为坐标原点,以平行于图像的x和y方向为x轴和y轴,z轴和光轴平行,x, y,z互相垂直,单位是长度单位。
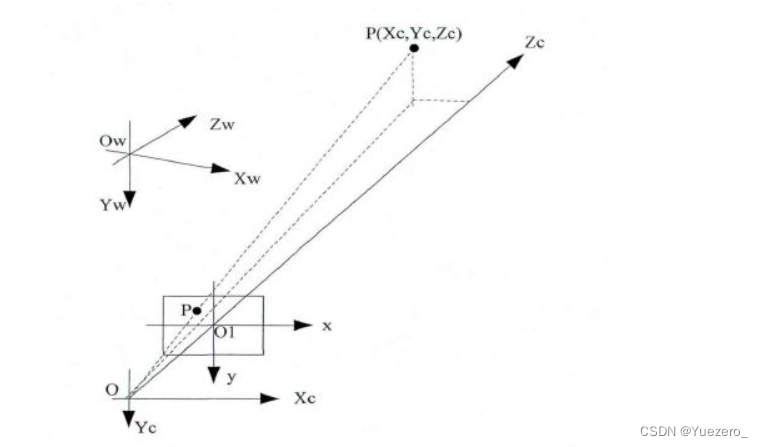
- 图像物理坐标系(X,Y):以
主光轴Zc和图像平面交点为坐标原点,x’和y’方向如图所示,单位是长度单位。 - 图像像素坐标系(Xc,Yc):以
图像的上/下/左/右顶点为坐标原点,u和v方向平行于x’和y’方向,单位是像素。(图像物理坐标系和像素坐标系仅通过平移可重合)
1.2 四种坐标系之间的转换
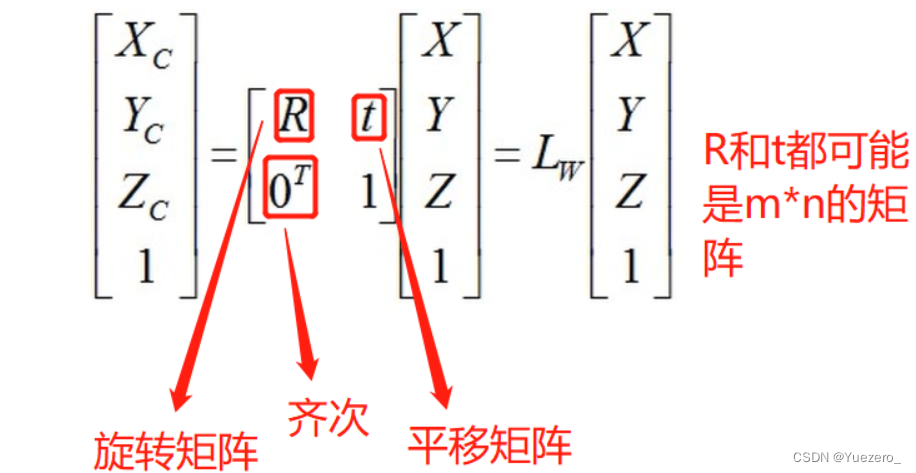
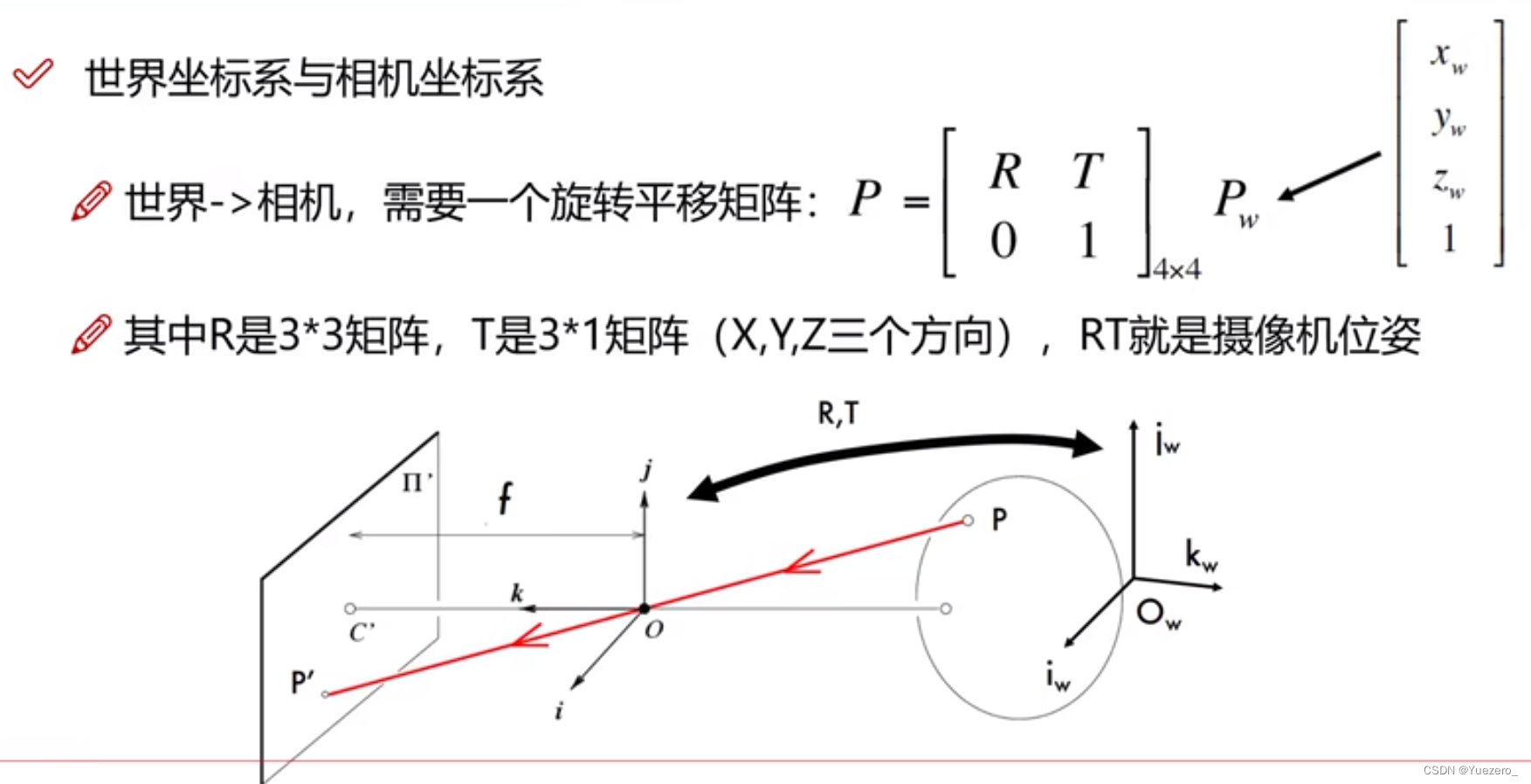
世界坐标系 -> 摄像机坐标系
从上面的坐标系介绍中我们可知世界坐标系和摄像机坐标系都是三维坐标系,而物体在三维空间中的位置变化只有两种,即平移和旋转,这个时候就用到我们的欧式变换了,即使原始坐标的齐次坐标乘以我们的欧式变换矩阵,就能得到最终的结果(使用欧式变换本质上就是为了实现矩阵相乘,齐次就是方便我们进行乘法)
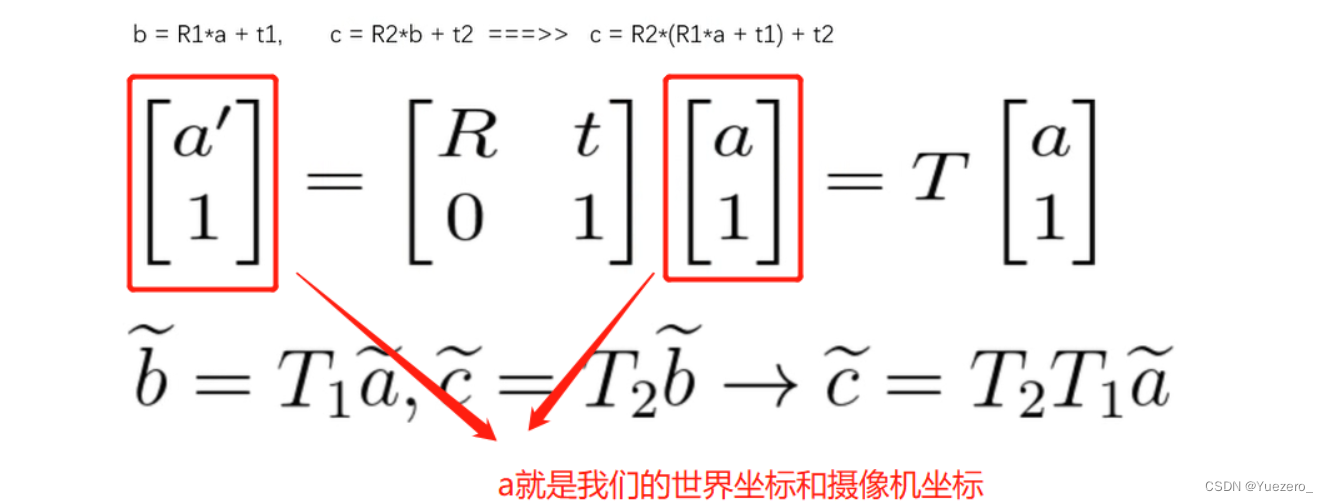
但是很多时候平移和旋转都不止进行了一次,在多次连续的平移和旋转的情况下,加入假如我们将向量a进行了两次欧式变换,旋转和平移分别为R1,t1和R2,t2。
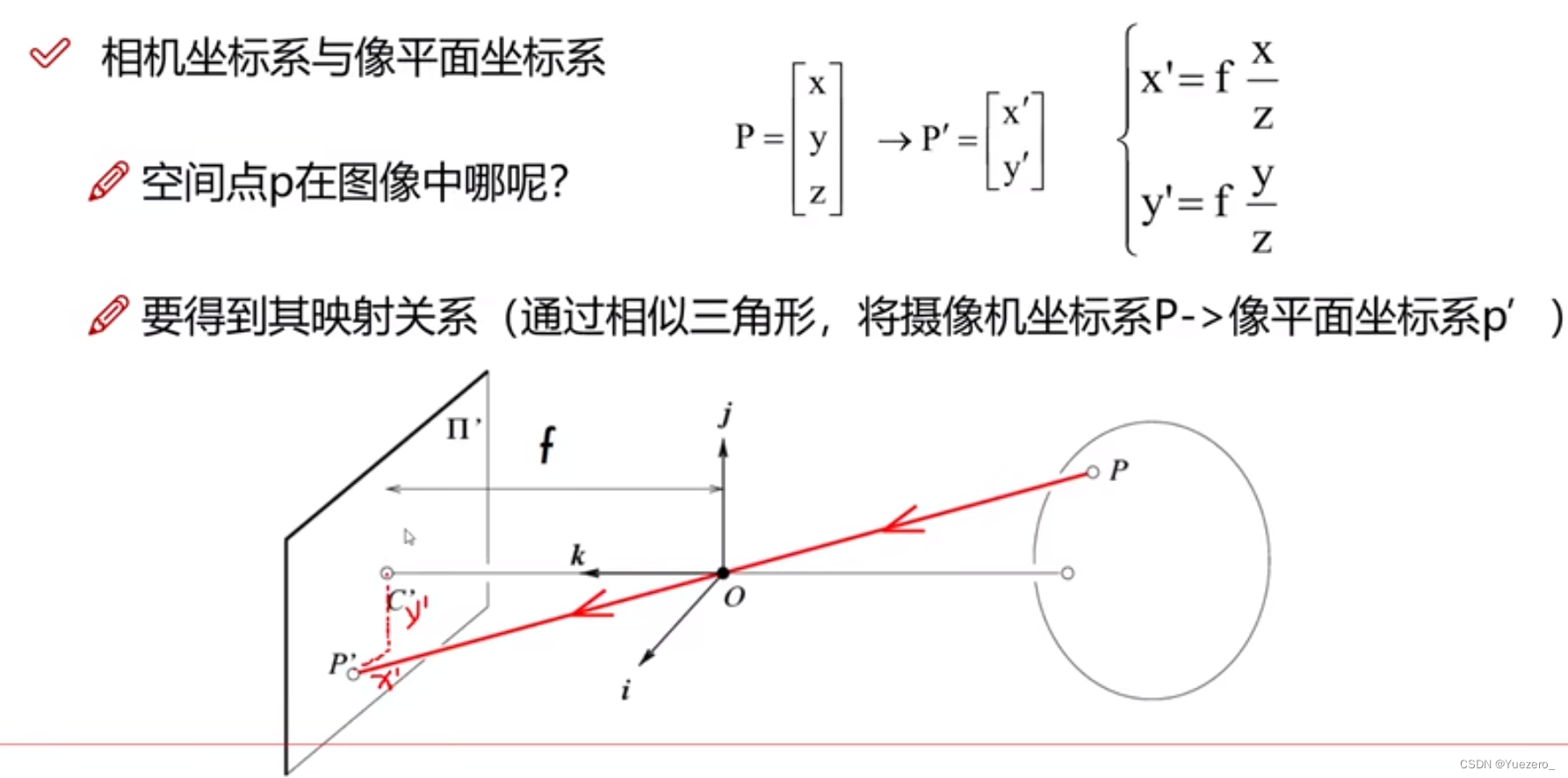
摄像机坐标系 -> 图像物理坐标系
从摄像机坐标变换到图像物理坐标,我们利用了相似三角形的原理,根据相似三角形的性质列出对应的矩阵计算式,即可求出我们需要的结果,但是摄像机坐标是3维的,而现在要求的图像物理坐标是2维的,所以我们还是需要用到齐次坐标。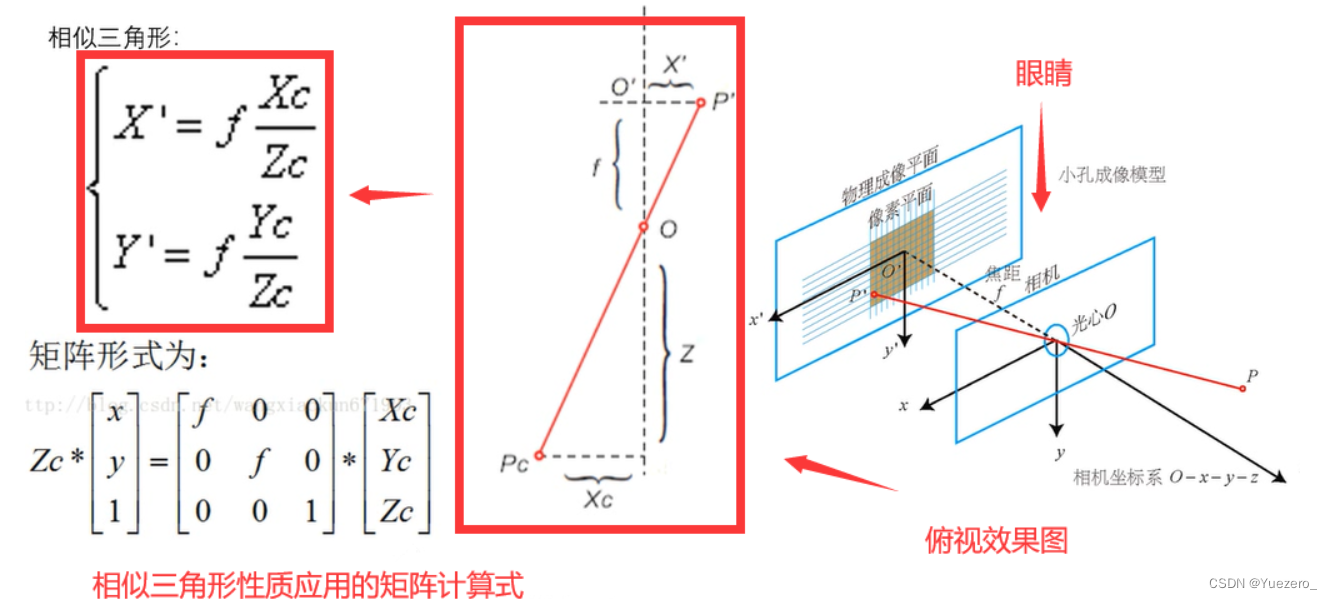
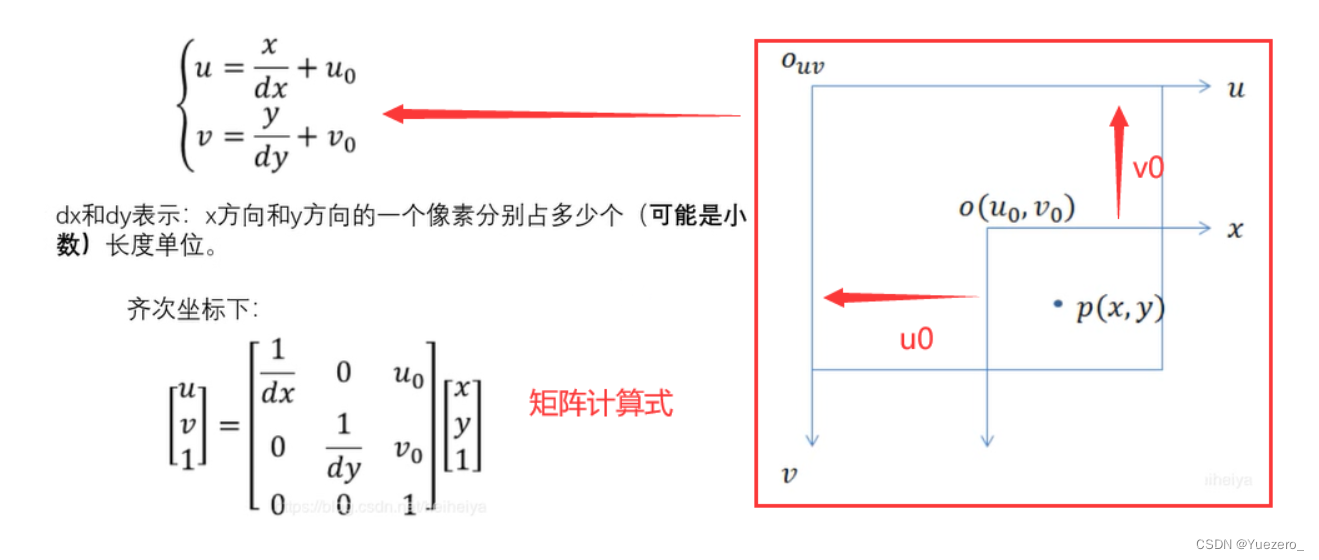
图像物理坐标系 -> 图像像素坐标系
图像物理坐标系与图像像素坐标系之间的转换其实就是单位转换和中心原点的转换,一个是中心点和长度单位,另一个是左上角和像素单位
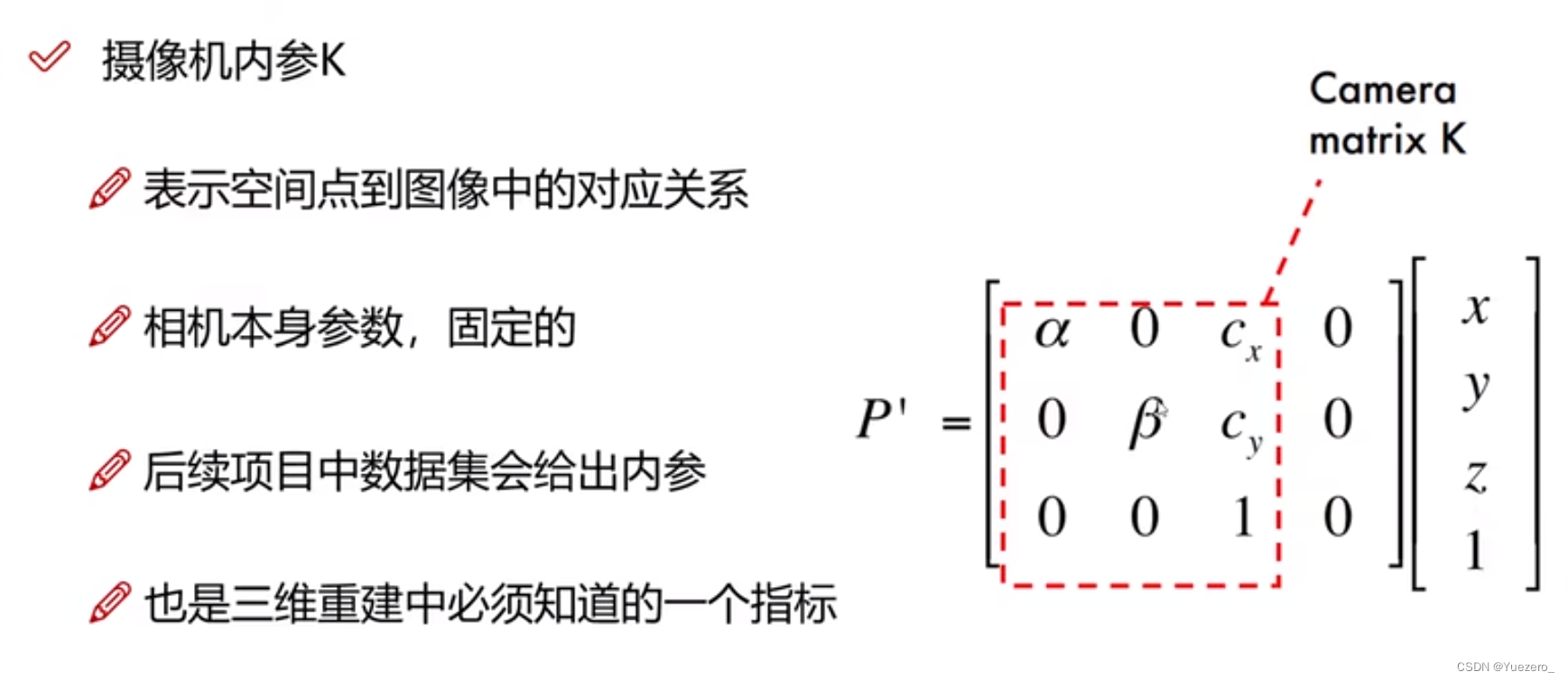
1.3 相机内参
相机成像原理
这些坐标系转换过程(世界->相机->物理->像素)就是相机的成像原理,相机坐标系是中间商。
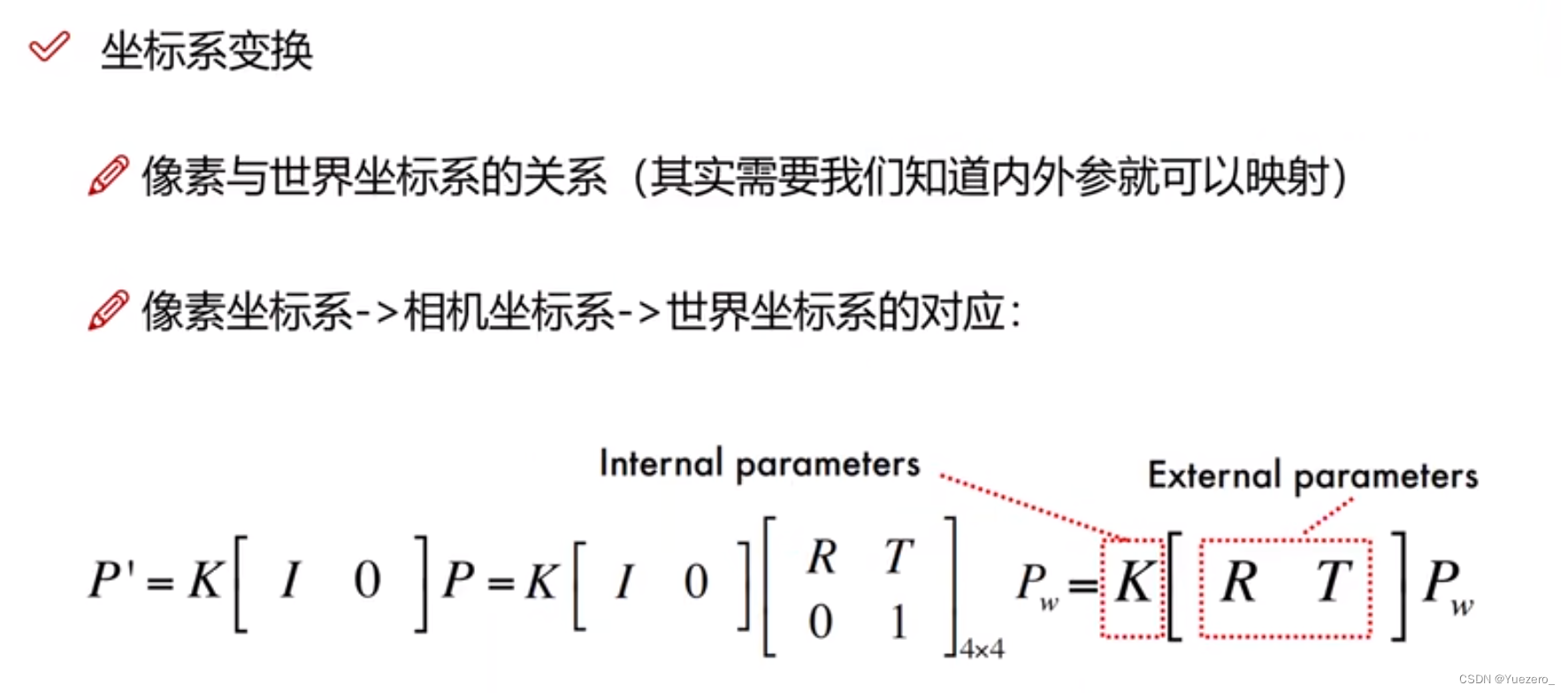
相机内参K: 相机坐标系<->像素坐标系的齐次转换矩阵,由相机本身决定。
相机外参RT:旋转平移矩阵,世界坐标系<->相机坐标系,外参由视角决定。
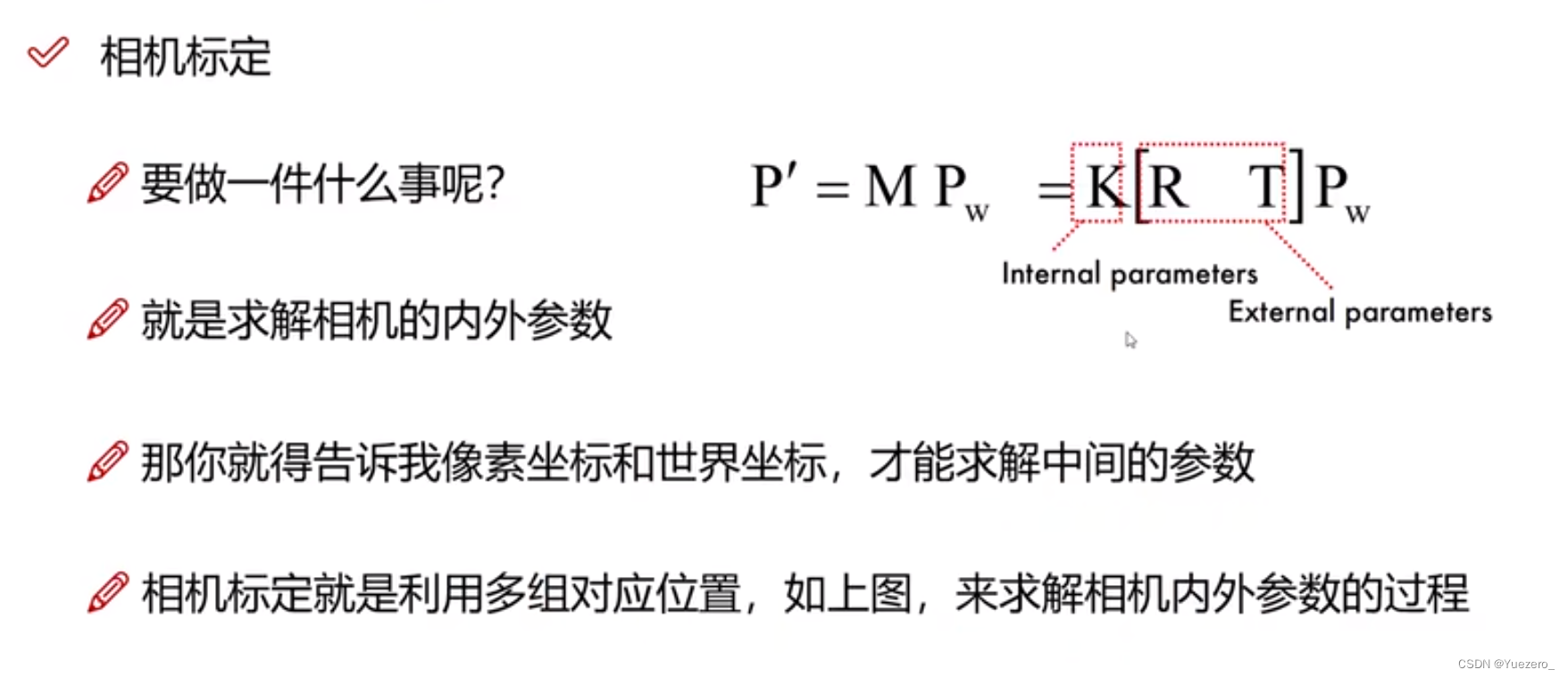
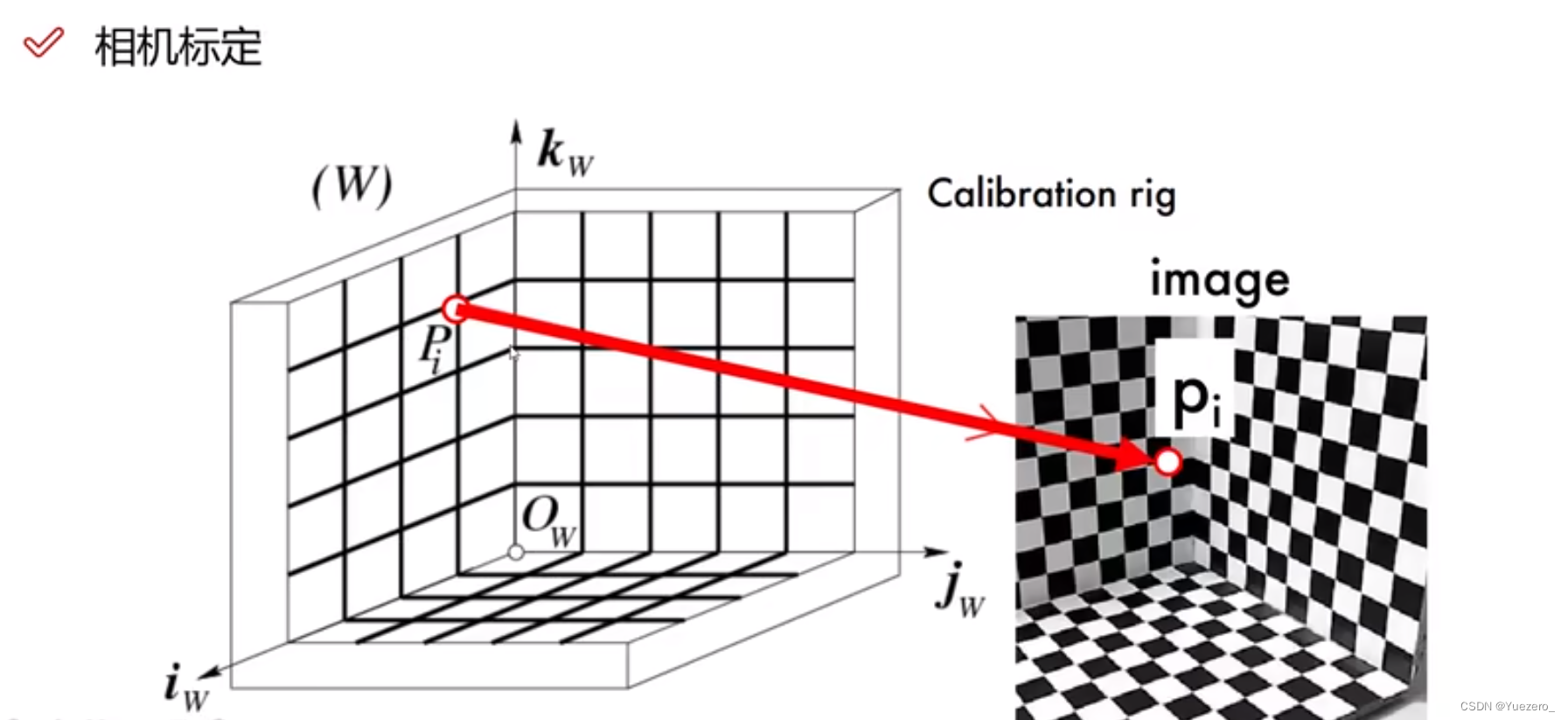
1.4 相机标定
获取相机内参和外参的方法就是相机标定,找到很多对儿点的世界坐标系和像素坐标系的对应关系,求解内外参。
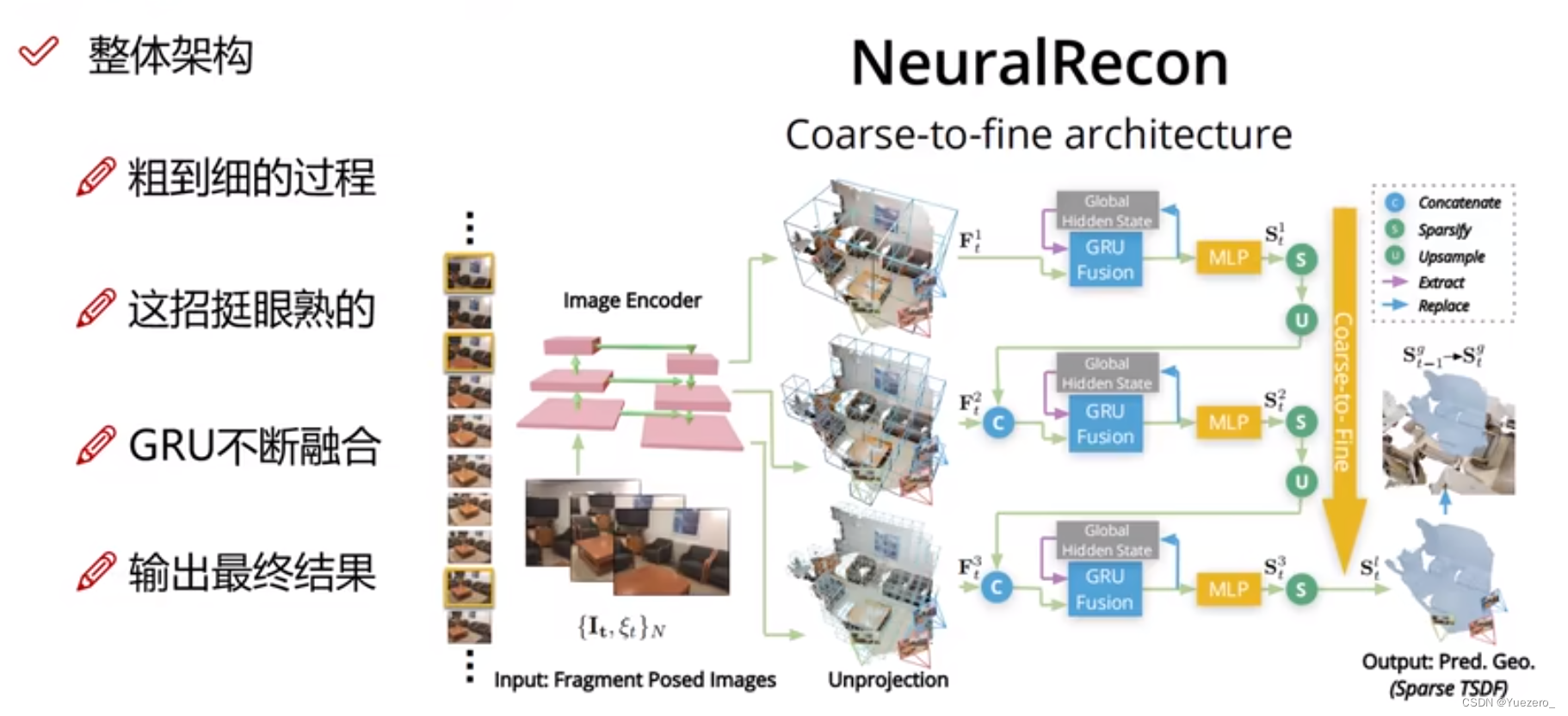
2 单目三维重建
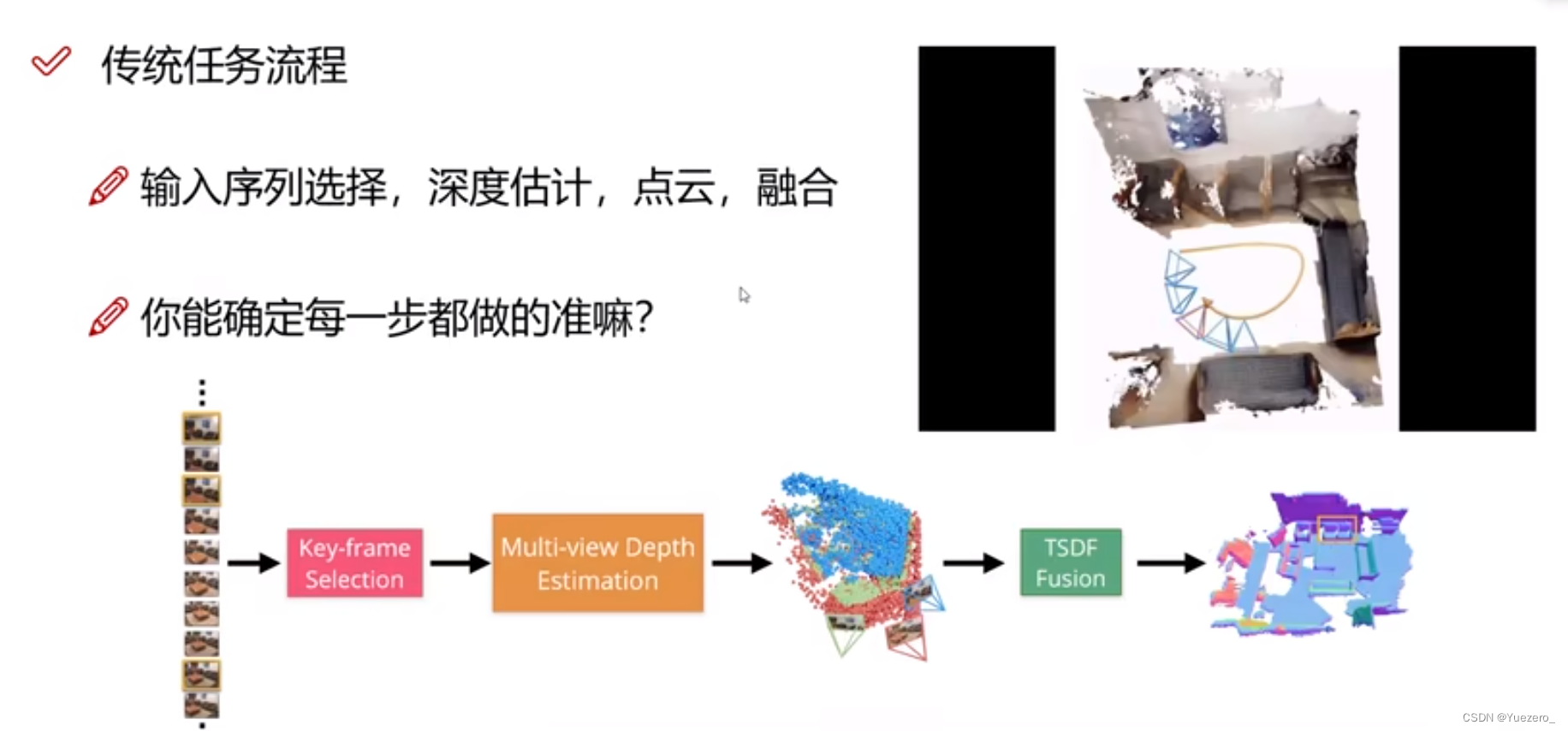
传统三维重建:需要深度估计和点云融合的中间步骤,而深度三维重建使用End2End模型一条龙完成。
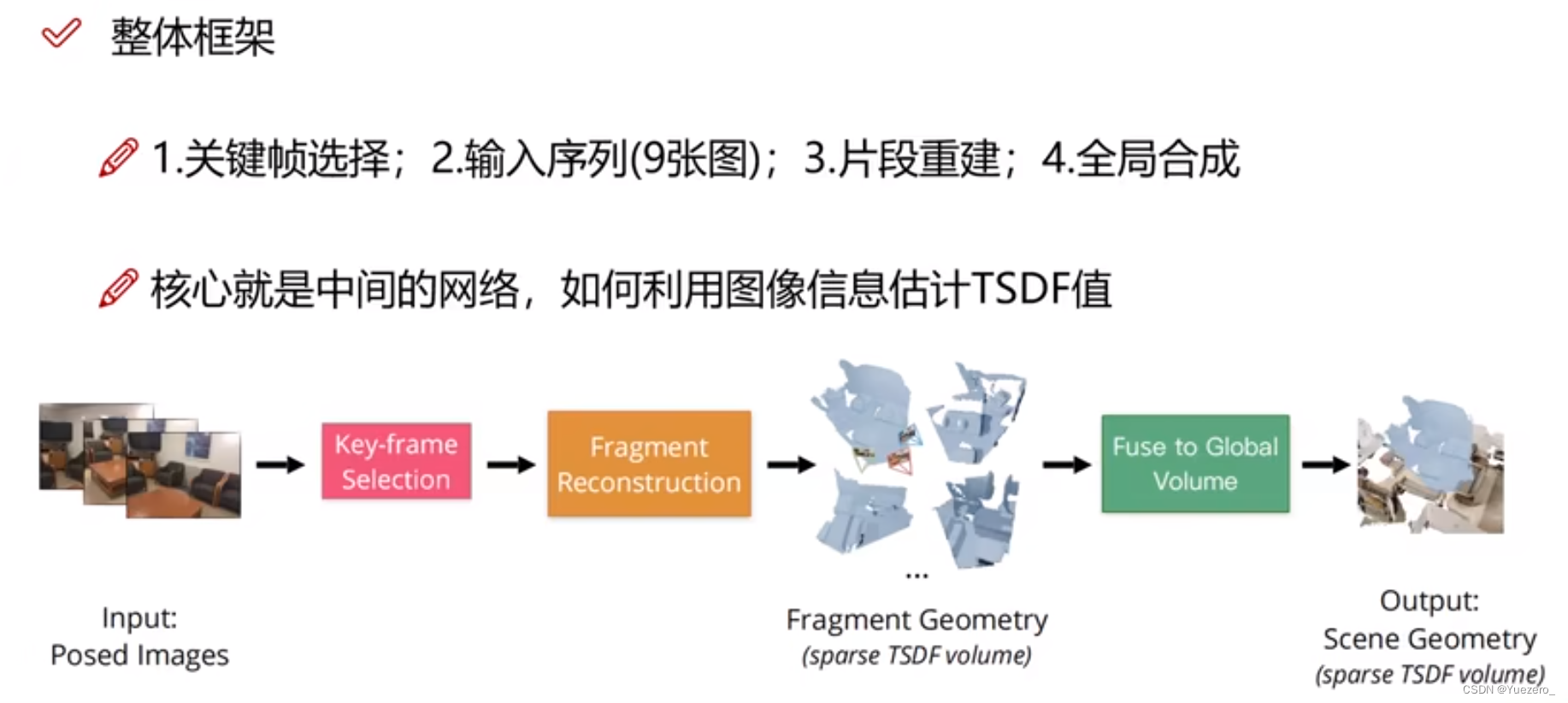
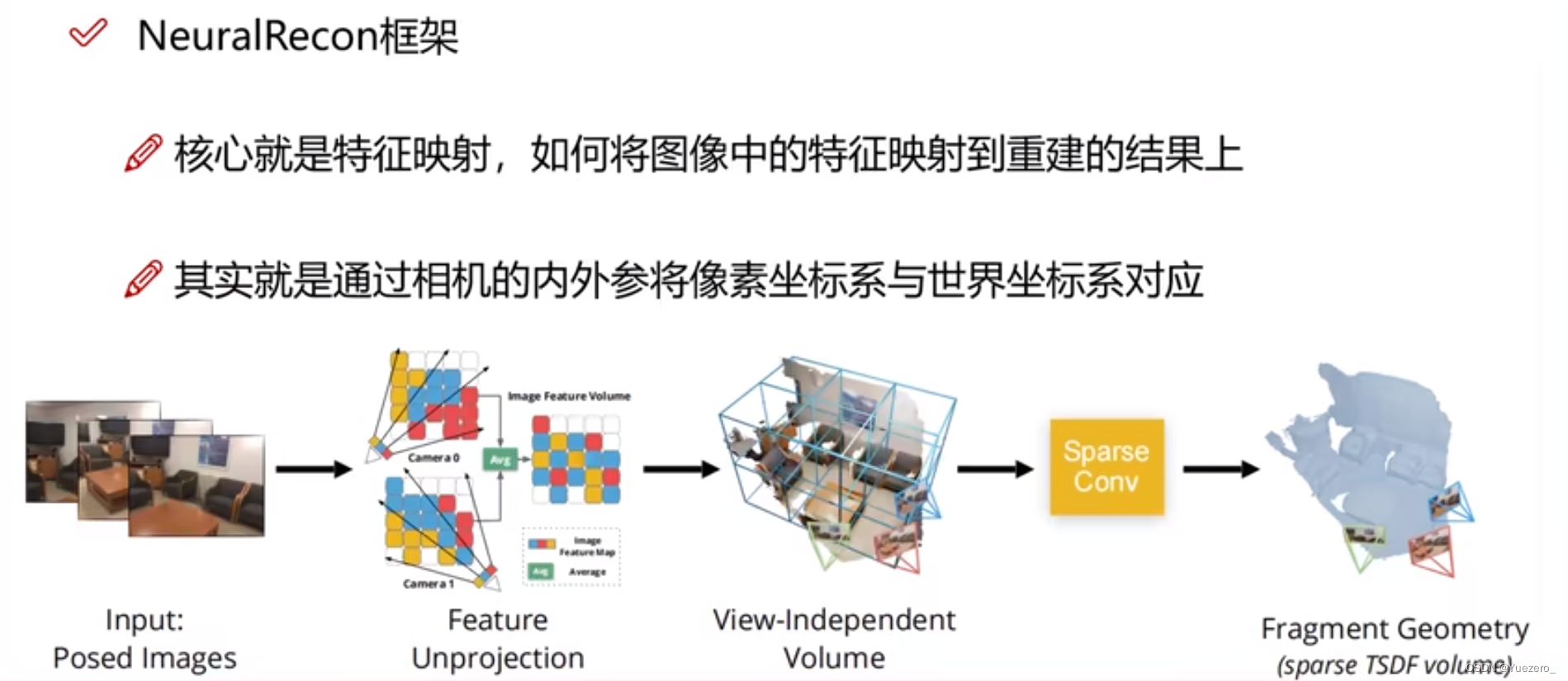
2.1 NeuralRecon

相关文章:
三维重建(单目、双目、多目、点云、SFM、SLAM)
1 相机几何与标定1.1 相机模型中的坐标系1.2 四种坐标系之间的转换1.3 相机内参1.4 相机标定2 单目三维重建2.1 NeuralRecon三维重建定义 在计算机视觉中, 三维重建是指根据单视图或者多视图的图像重建三维信息的过程. 由于单视频的信息不完全,因此三维重建需要利用经验知识. 而…...

Java中的final和权限修饰符
目录 final 常量 细节: 权限修饰符 Java权限修饰符用于控制类、方法、变量的访问范围。Java中有四种权限修饰符: 权限修饰符的使用场景: final 方法 表明该方法是最终方法,不能被重写。类 表明该类是最终类,不能被继…...
MySQL的基本语句(SELECT型)
基本MySQL语句SELECTSELECT FROM 列的别名去除重复行空值着重号算术运算符加法( )减法( - )乘法( * )除法( / 或DIV)求模( % 或MOD)比较运算符等于( )安全等于( <> )不等于( ! 或 <…...
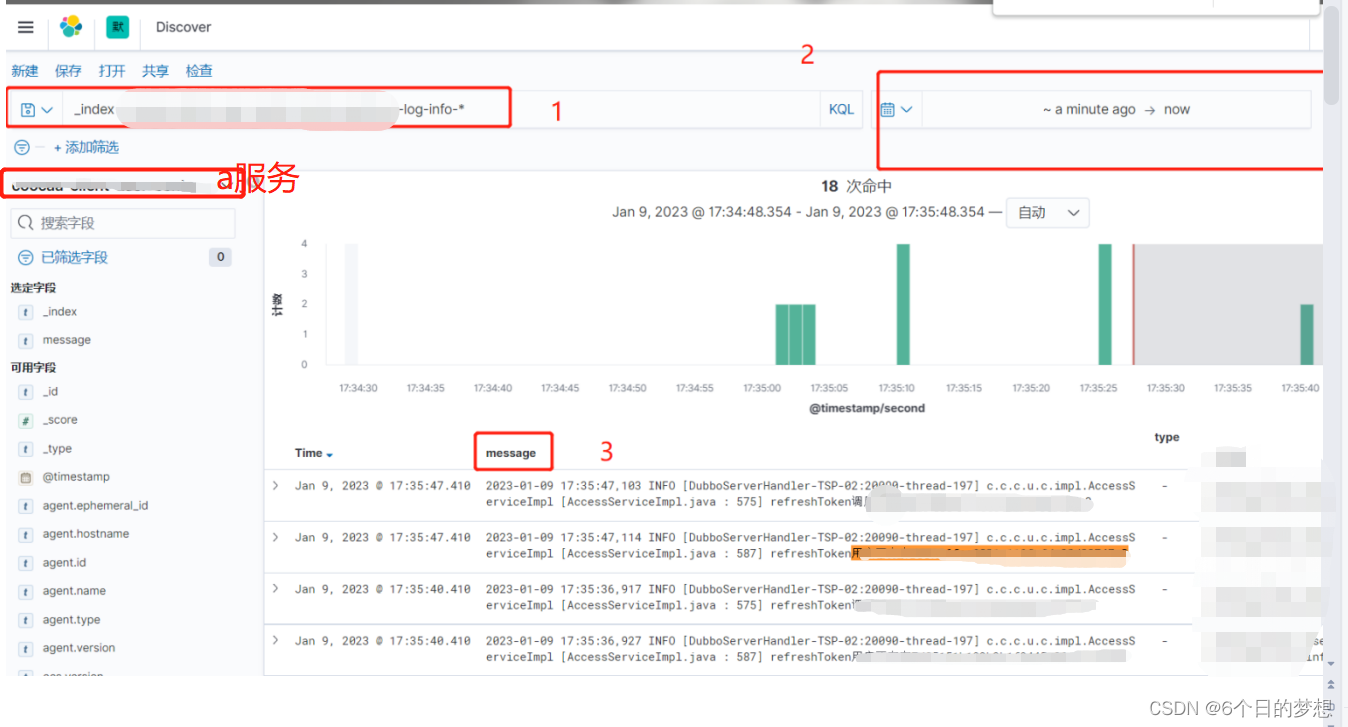
日志服务搭建-ES-FileBeat-Kibana
1次订单量突增问题,导致了有几个数据没有录库,但是确有支付的记录,啥玩意,还能有这个操作,组内安排问题定位,解决,一看打出来的日志,只有支付有,生成订单这边没有&#x…...
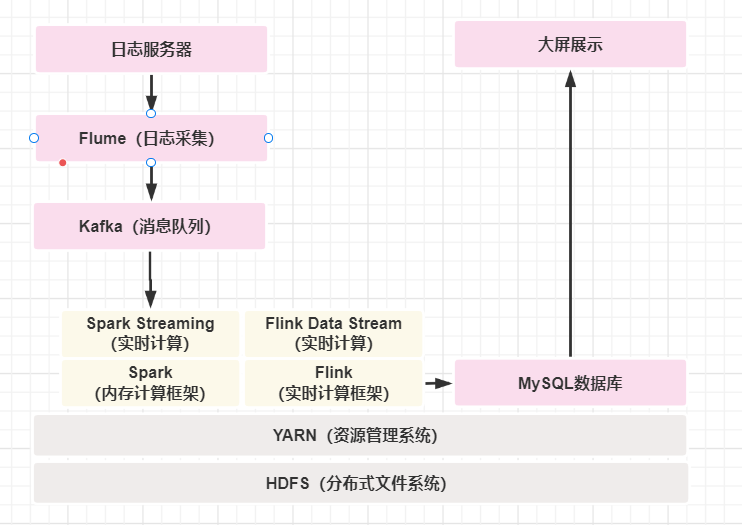
大数据架构设计与数据计算流程
大数据架构设计Hadoop有3个核心组件:分布式文件系统HDFS;分布式运算编程框架MapReduce;分布式资源调度平台YARN。HBase,Hadoop dataBase,基于HDFS的NoSQL数据库,面向列式的内存存储,定期将内存数…...
207. 课程表
207. 课程表https://leetcode.cn/problems/course-schedule/ 难度中等1526 你这个学期必须选修 numCourses 门课程,记为 0 到 numCourses - 1 。 在选修某些课程之前需要一些先修课程。 先修课程按数组 prerequisites 给出,其中 prerequisites[i] [a…...

2023-03-08 mysql列存储数据库-查询执行过程分析
摘要: 在mysql的sql层和存储引擎的交互模式中, 存储引擎实现handler接口, 由SQL层负责调用接口, 所以执行的过程可以看作是在sql层中, innodb仅提供接口。 但是在mysql列存储引擎中, TMD直接替换掉了sql层的执行接口,并且将sql层的查询树转换成了自己的一套查询树, 然后根据…...
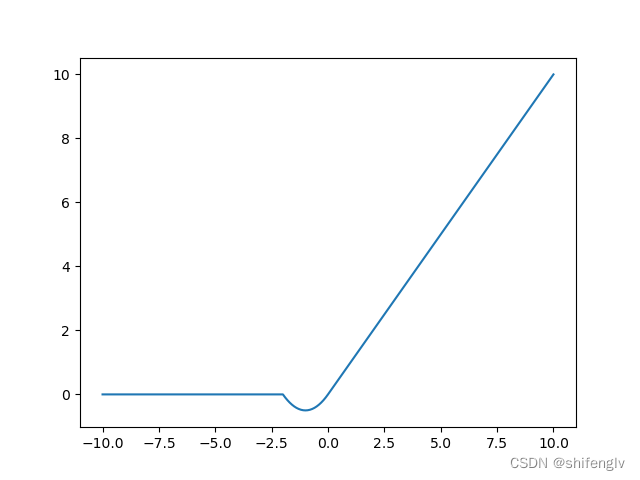
各种激活函数的计算公式、图像以及实现代码
激活函数已经成为神经网络中非常重要的一部分,随着各种类型的神经网络模型被人们开发出来,各种激活函数也应运而生,在不同的场景中,取得良好的效果。本文跟据著名的YOLO系列目标检测模型的源码 AlexeyAB Darknet,整理出…...

ArangoDB
介绍 ArangoDB 是一个原生的多模型开源数据库,具有灵活的文档、图形和键值数据模型。使用方便的类似 SQL 的查询语言或 JavaScript 扩展构建高性能应用程序。主要特点 在集群上安装 ArangoDB —— 安装简单灵活的数据建模:数据建模为键值对、文档或图表的…...

MySQL8.0Linux安装及主从的搭建
MySQL8.0Linux安装教程 下载并安装 需要说明的一点是我使用的是SSH secure shell Client连接linux系统的,它的用法和命令窗口差不多。界面如图:一样的使用Linux命令操作。 话不多说 第一步: 1)、切换到 /usr/local下 cd /usr/…...
苹果新专利实现无线技术传输睡眠数据,蓝牙在智能家居中的应用
苹果于 2017 年 5 月收购了芬兰科技公司 Beddit,只是在过去 6 年时间里并没有太大的动作。根据美国商标和专利局本周公示的清单,苹果获得了一项 Beddit 相关的技术专利。 根据专利描述,苹果使用一根或者多根天线,利用电磁辐射的…...
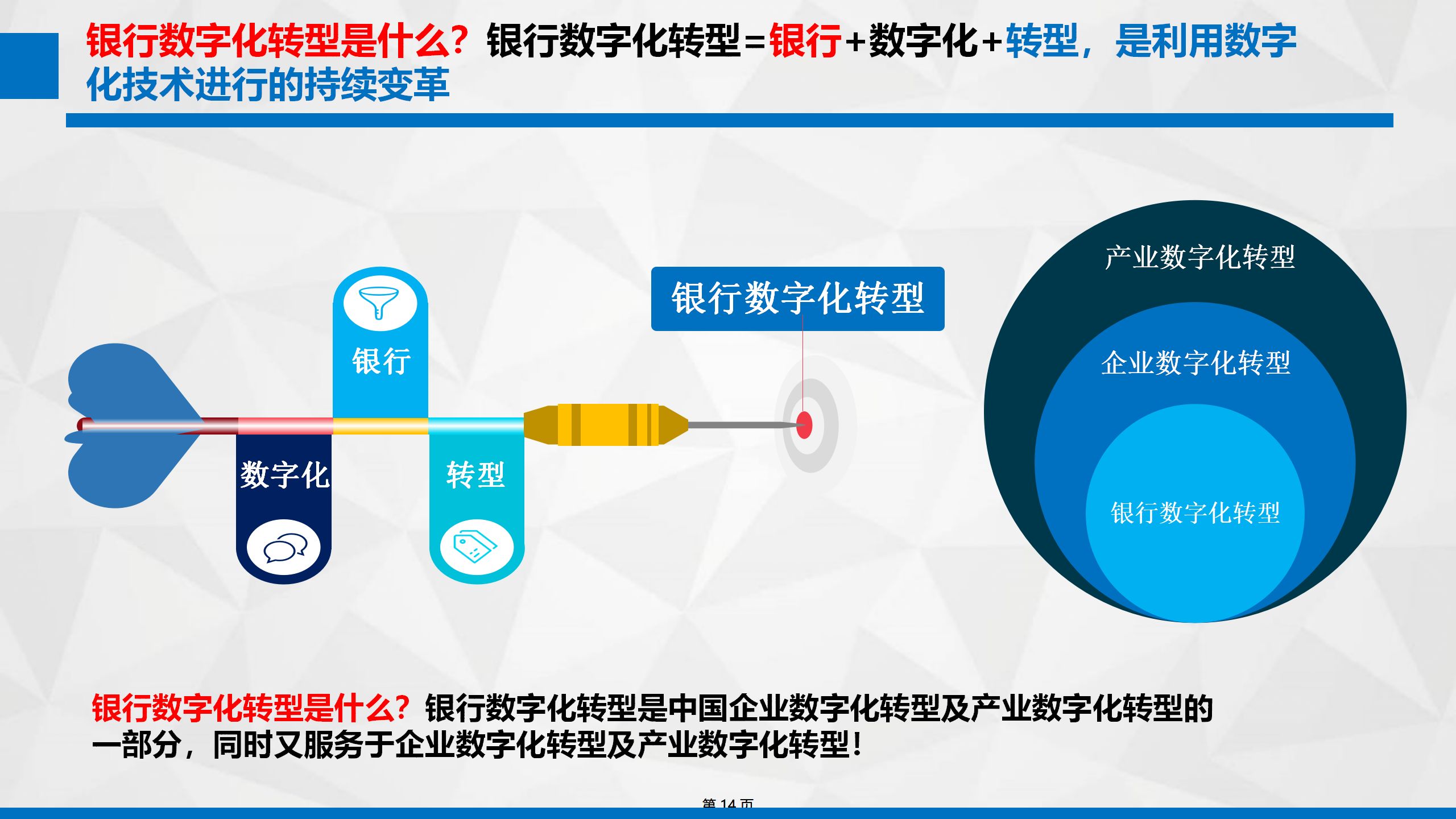
银行数字化转型导师坚鹏:数字化转型为什么需要致良知与知行合一
在银行数字化转型过程中,特别需要致良知与知行合一哲学思想的指导。 知中有行,行中有知;行极而知,知极而行;知行无端,知行无始。知与行是一件事,做事与培养本体(修心)也是…...
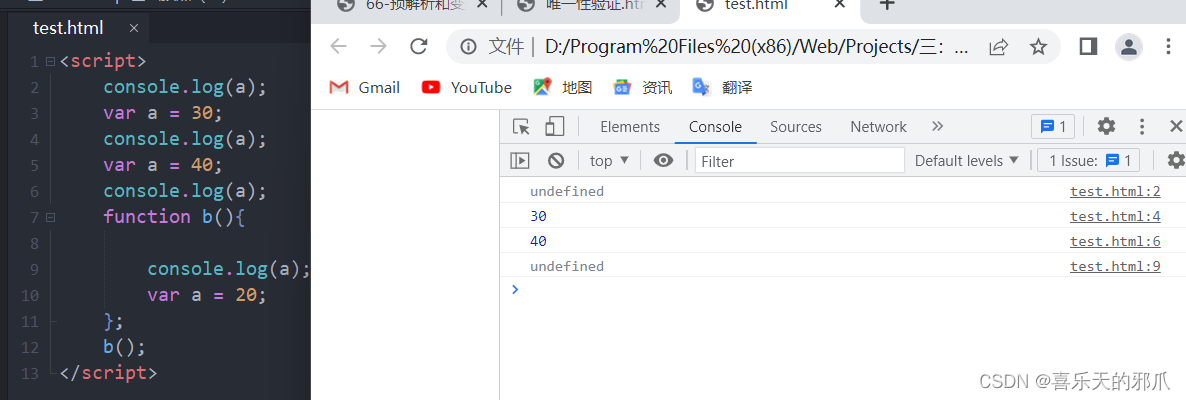
Web前端学习:章三 -- JavaScript预热(二)
六五:作用域与function function:函数,不是数学上的函数,与写代码有关 JS中的函数:运用它,起个名字,然后对函数进行调用,即可将函数中的内容执行一遍 1、function 最基本的作用域…...

Excel绘制数据对比表格-表格可视化
Word中生成的表格一般比较单调,若一组数据存在对比的情况时,读者/审稿人难以直接通过详细对比数据来分析,此时若可以将该组数据可视化来对比则为好,Excel则可实现该功能。 关于有些期刊需要提供表格中的数据便于复制等情况时&…...

究竟是谁负了谁,来自底层测试的2022年终总结
前言 说实话坐在椅子前,都想好了,该怎么去写,甚至感觉有好多要写的,但是当我坐在椅子上时,却不知道该怎么开头了,不知道是不是紧张?还是不舍?难道还没有跟过去挥手告别的勇气吗&…...
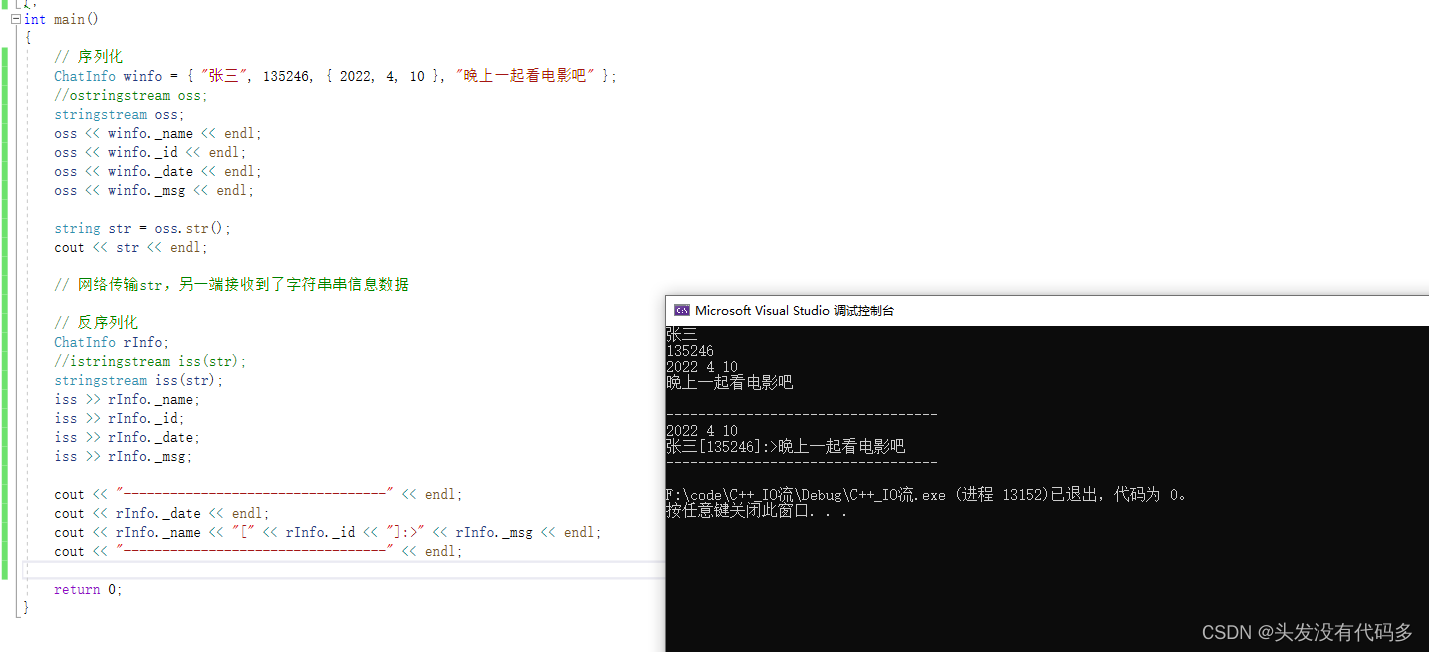
C++——IO流
目录 C语言的输入与输出 流是什么 CIO流 C标准IO流 C文件IO流 二进制读写 文本读写 stringstream的简单介绍 C语言的输入与输出 C语言中我们用到的最频繁的输入输出方式就是scanf ()与printf()。 scanf(): 从标准输入设备(键 盘)读取数据,并将值存放在变量中。…...
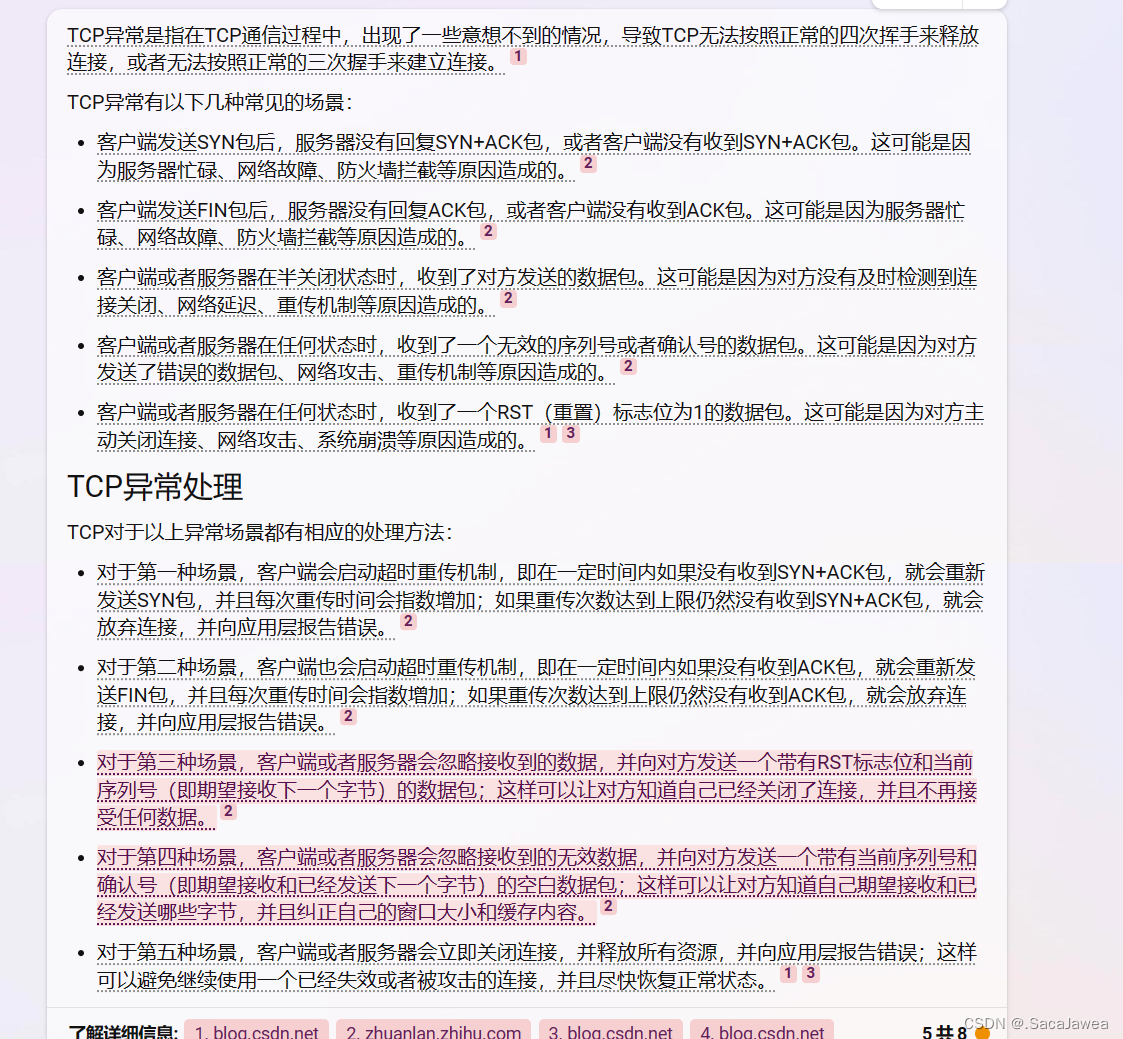
网络 | UDP与TCP协议讲解 | TCP可靠性是怎样实现的?
文章目录前置知识查看网络状态的工具查看进程idUDP协议协议格式UDP只有接收缓冲区基于UDP的应用层协议TCP协议流的理解协议格式确认应答机制缓冲区序号的作用流量控制超时重传机制6位标志位紧急数据的处理三次握手listen的第二个参数全连接和半连接队列都维护了什么信息&#x…...
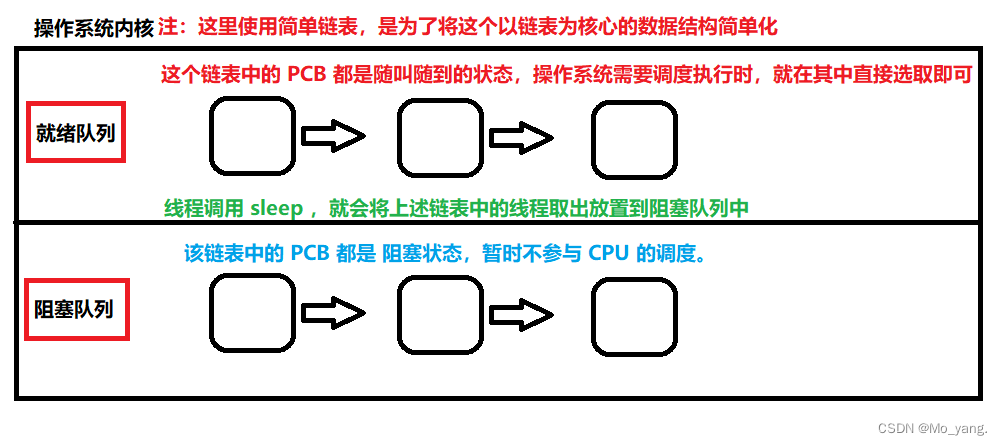
JavaEE——简单介绍Thread类以及线程的基本操作
文章目录一、Thread 类中的常见构造方法二、Thread 的一些常见属性三、线程的启动——start()isAlive() 方法的解释四、线程中断五、线程等待-join()了解六、简单解释线程休眠一、Thread 类中的常见构造方法 我们已知,Thread 类是Java中多线程中的一个关键类&#…...

Java的数据库编程:JDBC
Content 🎉1什么是API 🎉2.什么是JDBC 🎉3.数据库驱动包的安装 🎉4.数据库安装包在idea的使用 🎉5.JDBC的增删改查的简单实现 今天为大家带来JAVA的数据库编程,也就是用Java实现数据库 数据库的最基本的操作就是…...
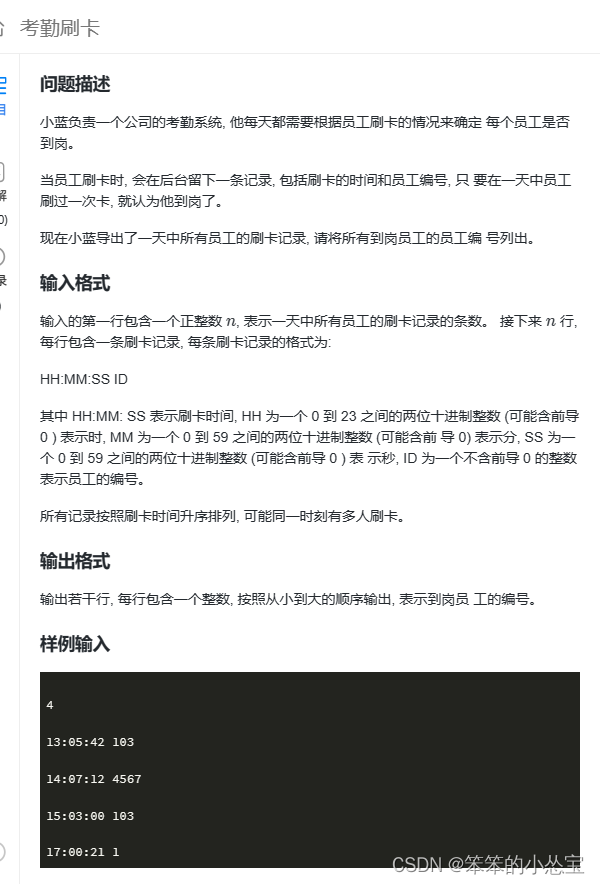
蓝桥冲刺31天之第六天
今天是摆子的一天,明天我要肝一整天的第四题!!! PS:一个普通的排序罢了 import java.io.*; import java.util.Arrays; import java.util.Scanner;/*** ClassName 考勤刷卡* Description TODO* Author 小怂很怂* Date 2…...

未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?
编辑:陈萍萍的公主一点人工一点智能 未来机器人的大脑:如何用神经网络模拟器实现更智能的决策?RWM通过双自回归机制有效解决了复合误差、部分可观测性和随机动力学等关键挑战,在不依赖领域特定归纳偏见的条件下实现了卓越的预测准…...
linux之kylin系统nginx的安装
一、nginx的作用 1.可做高性能的web服务器 直接处理静态资源(HTML/CSS/图片等),响应速度远超传统服务器类似apache支持高并发连接 2.反向代理服务器 隐藏后端服务器IP地址,提高安全性 3.负载均衡服务器 支持多种策略分发流量…...

SciencePlots——绘制论文中的图片
文章目录 安装一、风格二、1 资源 安装 # 安装最新版 pip install githttps://github.com/garrettj403/SciencePlots.git# 安装稳定版 pip install SciencePlots一、风格 简单好用的深度学习论文绘图专用工具包–Science Plot 二、 1 资源 论文绘图神器来了:一行…...
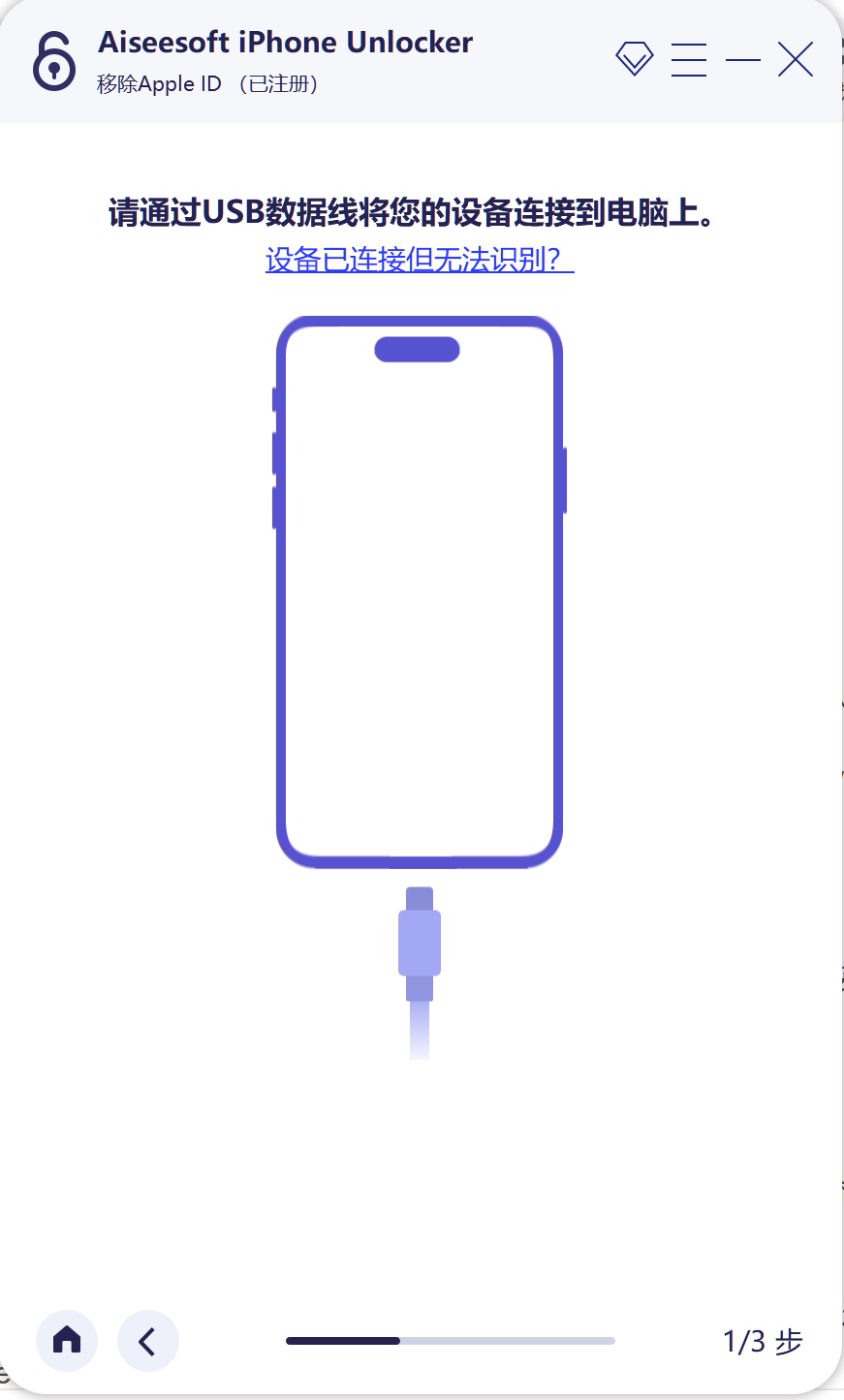
iPhone密码忘记了办?iPhoneUnlocker,iPhone解锁工具Aiseesoft iPhone Unlocker 高级注册版分享
平时用 iPhone 的时候,难免会碰到解锁的麻烦事。比如密码忘了、人脸识别 / 指纹识别突然不灵,或者买了二手 iPhone 却被原来的 iCloud 账号锁住,这时候就需要靠谱的解锁工具来帮忙了。Aiseesoft iPhone Unlocker 就是专门解决这些问题的软件&…...
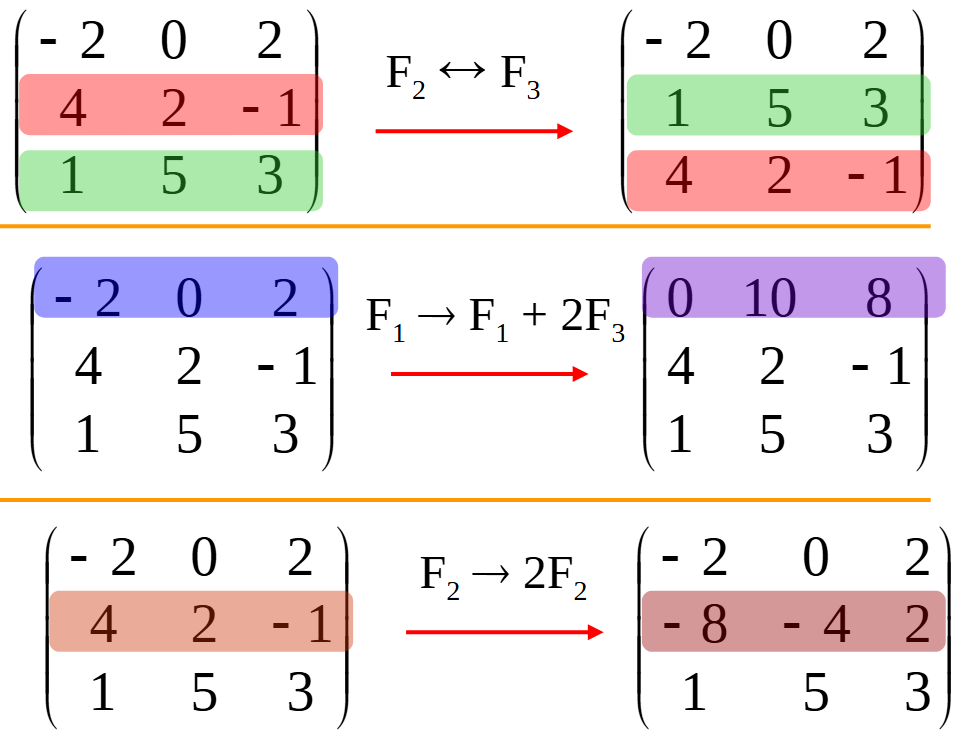
使用 SymPy 进行向量和矩阵的高级操作
在科学计算和工程领域,向量和矩阵操作是解决问题的核心技能之一。Python 的 SymPy 库提供了强大的符号计算功能,能够高效地处理向量和矩阵的各种操作。本文将深入探讨如何使用 SymPy 进行向量和矩阵的创建、合并以及维度拓展等操作,并通过具体…...
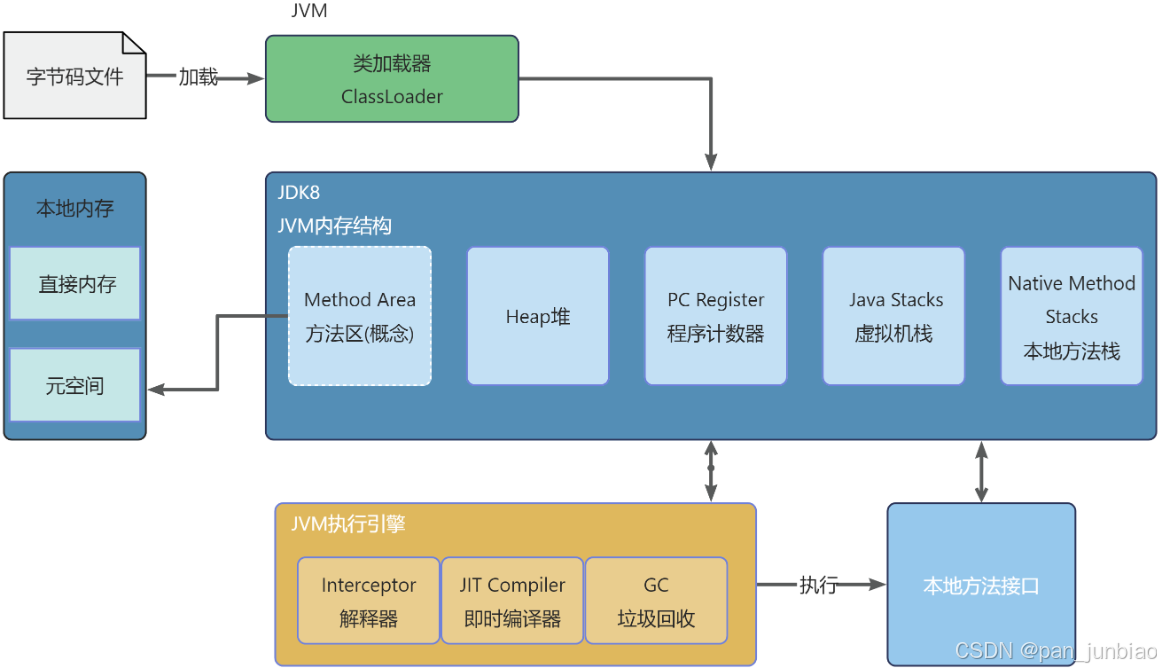
JVM虚拟机:内存结构、垃圾回收、性能优化
1、JVM虚拟机的简介 Java 虚拟机(Java Virtual Machine 简称:JVM)是运行所有 Java 程序的抽象计算机,是 Java 语言的运行环境,实现了 Java 程序的跨平台特性。JVM 屏蔽了与具体操作系统平台相关的信息,使得 Java 程序只需生成在 JVM 上运行的目标代码(字节码),就可以…...

IP如何挑?2025年海外专线IP如何购买?
你花了时间和预算买了IP,结果IP质量不佳,项目效率低下不说,还可能带来莫名的网络问题,是不是太闹心了?尤其是在面对海外专线IP时,到底怎么才能买到适合自己的呢?所以,挑IP绝对是个技…...

Go 语言并发编程基础:无缓冲与有缓冲通道
在上一章节中,我们了解了 Channel 的基本用法。本章将重点分析 Go 中通道的两种类型 —— 无缓冲通道与有缓冲通道,它们在并发编程中各具特点和应用场景。 一、通道的基本分类 类型定义形式特点无缓冲通道make(chan T)发送和接收都必须准备好࿰…...

Git常用命令完全指南:从入门到精通
Git常用命令完全指南:从入门到精通 一、基础配置命令 1. 用户信息配置 # 设置全局用户名 git config --global user.name "你的名字"# 设置全局邮箱 git config --global user.email "你的邮箱example.com"# 查看所有配置 git config --list…...
stm32wle5 lpuart DMA数据不接收
配置波特率9600时,需要使用外部低速晶振...