RandLA-Net 训练自定义数据集


https://arxiv.org/abs/1911.11236
搭建训练环境
git clone https://github.com/QingyongHu/RandLA-Net.git- 搭建 python 环境 , 这里我用的
3.9conda create -n randlanet python=3.9 source activate randlanet pip install tensorflow==2.15.0 -i https://pypi.tuna.tsinghua.edu.cn/simple --timeout=120 pip install -r helper_requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple pip install Cython -i https://pypi.tuna.tsinghua.edu.cn/simple conda install -c conda-forge scikit-learn - cd
utils/cpp_wrappers/cpp_subsampling/, 执行python setup.py build_ext --inplace, 输出grid_subsampling.cpython-39-x86_64-linux-gnu.so - cd
nearest_neighbors, 执行python setup.py build_ext --inplace, 输出nearest_neighbors.cpython-39-x86_64-linux-gnu.so
制作数据集
- 这里我用
CloudCompare标注的数据集 , 具体标注方法,上网找找. - 创建
make_train_dataset.py, 开始生成训练数据集# 写这段代码的时候,只有上帝和我知道它是干嘛的 # 现在,只有上帝知道 # @File : make_cloud_train_datasets.py # @Author : J. # @desc : 生成 RandLanet 训练数据集from sklearn.neighbors import KDTree from os.path import join, exists, dirname, abspath import numpy as np import os, glob, pickle import sysBASE_DIR = dirname(abspath(__file__)) ROOT_DIR = dirname(BASE_DIR) sys.path.append(BASE_DIR) sys.path.append(ROOT_DIR) from helper_ply import write_ply from helper_tool import DataProcessing as DPgrid_size = 0.01 dataset_path = './data/sample/original_data' original_pc_folder = join(dirname(dataset_path), 'original_ply') sub_pc_folder = join(dirname(dataset_path), 'input_{:.3f}'.format(grid_size)) os.mkdir(original_pc_folder) if not exists(original_pc_folder) else None os.mkdir(sub_pc_folder) if not exists(sub_pc_folder) else Nonerailway_cnt = 0 backgroud_cnt = 0 for pc_path in glob.glob(join(dataset_path, '*.txt')):file_name = os.path.basename(pc_path)[:-4]if exists(join(sub_pc_folder, file_name + '_KDTree.pkl')):continuepc = np.loadtxt(pc_path)labels = pc[:, -1].astype(np.uint8)values , counts = np.unique(labels,return_counts = True)for i in range(len(values)):# 我标注2个类别(包含背景类别)# 统计每个类别点的数量if values[i] == 0:backgroud_cnt = backgroud_cnt + counts[i]elif values[i] == 1:railway_cnt = railway_cnt + counts[i]full_ply_path = join(original_pc_folder, file_name + '.ply')# Subsample to save spacesub_points, sub_colors, sub_labels = DP.grid_sub_sampling(pc[:, :3].astype(np.float32),pc[:, 3:6].astype(np.uint8), labels, 0.01)sub_labels = np.squeeze(sub_labels)write_ply(full_ply_path, (sub_points, sub_colors, sub_labels), ['x', 'y', 'z', 'red', 'green', 'blue', 'class'])# save sub_cloud and KDTree filesub_xyz, sub_colors, sub_labels = DP.grid_sub_sampling(sub_points, sub_colors, sub_labels, grid_size)sub_colors = sub_colors / 255.0sub_labels = np.squeeze(sub_labels)sub_ply_file = join(sub_pc_folder, file_name + '.ply')write_ply(sub_ply_file, [sub_xyz, sub_colors, sub_labels], ['x', 'y', 'z', 'red', 'green', 'blue', 'class'])search_tree = KDTree(sub_xyz, leaf_size=50)kd_tree_file = join(sub_pc_folder, file_name + '_KDTree.pkl')with open(kd_tree_file, 'wb') as f:pickle.dump(search_tree, f)proj_idx = np.squeeze(search_tree.query(sub_points, return_distance=False))proj_idx = proj_idx.astype(np.int32)proj_save = join(sub_pc_folder, file_name + '_proj.pkl')with open(proj_save, 'wb') as f:pickle.dump([proj_idx, labels], f) # 统计每个类别个数 print("----> backgroud_cnt: " + str(backgroud_cnt)) print("----> railway_cnt: " + str(railway_cnt)) - 修改
helper_tools.py#import cpp_wrappers.cpp_subsampling.grid_subsampling as cpp_subsampling#import nearest_neighbors.lib.python.nearest_neighbors as nearest_neighbors# 修改成import utils.cpp_wrappers.cpp_subsampling.grid_subsampling as cpp_subsamplingimport utils.nearest_neighbors.nearest_neighbors as nearest_neighbors... # 复制一个 起个自己名字 class ConfigSample:k_n = 16 # KNNnum_layers = 5 # Number of layersnum_points = 16000 # Number of input points# 包含背景类别,如果想排除背景类别, 修改 ignored_labelsnum_classes = 2 # Number of valid classes sub_grid_size = 0.01 # preprocess_parameter # Todobatch_size = 4 # batch_size during trainingval_batch_size = 2 # batch_size during validation and testtrain_steps = 500 # Number of steps per epochsval_steps = 3 # Number of validation steps per epochsub_sampling_ratio = [4, 4, 4, 4, 2] # sampling ratio of random sampling at each layerd_out = [16, 64, 128, 256, 512] # feature dimensionnoise_init = 3.5 # noise initial parametermax_epoch = 100 # maximum epoch during traininglearning_rate = 1e-2 # initial learning ratelr_decays = {i: 0.95 for i in range(0, 500)} # decay rate of learning ratetrain_sum_dir = 'train_log'saving = Truesaving_path = Noneaugment_scale_anisotropic = Trueaugment_symmetries = [True, False, False]augment_rotation = 'vertical'augment_scale_min = 0.8augment_scale_max = 1.2augment_noise = 0.001augment_occlusion = 'none'augment_color = 0.8@staticmethoddef get_class_weights(dataset_name):# pre-calculate the number of points in each categorynum_per_class = []if dataset_name is 'S3DIS':num_per_class = np.array([3370714, 2856755, 4919229, 318158, 375640, 478001, 974733,650464, 791496, 88727, 1284130, 229758, 2272837], dtype=np.int32)elif dataset_name is 'Semantic3D':num_per_class = np.array([5181602, 5012952, 6830086, 1311528, 10476365, 946982, 334860, 269353],dtype=np.int32)elif dataset_name is 'SemanticKITTI':num_per_class = np.array([55437630, 320797, 541736, 2578735, 3274484, 552662, 184064, 78858,240942562, 17294618, 170599734, 6369672, 230413074, 101130274, 476491114,9833174, 129609852, 4506626, 1168181])# TODO 增加一个自己的类别elif dataset_name is 'Sample':# 每一个类别点的数量num_per_class = np.array([4401119, 148313])weight = num_per_class / float(sum(num_per_class))ce_label_weight = 1 / (weight + 0.02)return np.expand_dims(ce_label_weight, axis=0) ...
训练
- main_Sample.py (拷贝 main_S3DIS.py)
from os.path import join, exists
from RandLANet import Network
from tester_Railway import ModelTester
from helper_ply import read_ply
from helper_tool import Plot
from helper_tool import DataProcessing as DP
from helper_tool import ConfigRailway as cfg
import tensorflow.compat.v1 as tf
tf.disable_v2_behavior()
import numpy as np
import pickle, argparse, osclass Railway:def __init__(self):self.name = 'Sample'# 最好给绝对路径self.path = '/home/ab/workspace/train/randla-net-tf2-main/data/sample'self.label_to_names = {0: 'background', 1: 'sample'}self.num_classes = len(self.label_to_names)self.label_values = np.sort([k for k, v in self.label_to_names.items()])self.label_to_idx = {l: i for i, l in enumerate(self.label_values)}# 如果想忽略背景类别 np.sort([0])#self.ignored_labels = np.sort([0]) # TODOself.ignored_labels = np.sort([]) # TODOself.original_folder = join(self.path, 'original_data')self.full_pc_folder = join(self.path, 'original_ply')self.sub_pc_folder = join(self.path, 'input_{:.3f}'.format(cfg.sub_grid_size))#训练、验证、测试数据都在original_data数据集中,需要做划分self.val_split = ["20240430205457370","20240430205527591"] self.test_split= ["20240430205530638"]# Initial training-validation-testing filesself.train_files = []self.val_files = []self.test_files = []cloud_names = [file_name[:-4] for file_name in os.listdir(self.original_folder) if file_name[-4:] == '.txt']#根据文件名划分训练、验证、测试数据集for pc_name in cloud_names:pc_file=join(self.sub_pc_folder, pc_name + '.ply')if pc_name in self.val_split:self.val_files.append(pc_file)elif pc_name in self.test_split:self.test_files.append(pc_file)else:self.train_files.append(pc_file)# Initiate containersself.val_proj = []self.val_labels = []self.test_proj = []self.test_labels = []self.possibility = {}self.min_possibility = {}self.class_weight = {}self.input_trees = {'training': [], 'validation': [], 'test': []}self.input_colors = {'training': [], 'validation': [], 'test': []}self.input_labels = {'training': [], 'validation': []}# Ascii files dict for testingself.ascii_files = {'20240430205530638.ply': '20240430205530638-reduced.labels'}self.load_sub_sampled_clouds(cfg.sub_grid_size)def load_sub_sampled_clouds(self, sub_grid_size):tree_path = join(self.path, 'input_{:.3f}'.format(sub_grid_size))files = np.hstack((self.train_files, self.val_files, self.test_files))for i, file_path in enumerate(files):cloud_name = file_path.split('/')[-1][:-4]print('Load_pc_' + str(i) + ': ' + cloud_name)if file_path in self.val_files:cloud_split = 'validation'elif file_path in self.train_files:cloud_split = 'training'else:cloud_split = 'test'# Name of the input fileskd_tree_file = join(tree_path, '{:s}_KDTree.pkl'.format(cloud_name))sub_ply_file = join(tree_path, '{:s}.ply'.format(cloud_name))# read ply with datadata = read_ply(sub_ply_file)sub_colors = np.vstack((data['red'], data['green'], data['blue'])).Tif cloud_split == 'test':sub_labels = Noneelse:sub_labels = data['class']# Read pkl with search treewith open(kd_tree_file, 'rb') as f:search_tree = pickle.load(f)self.input_trees[cloud_split] += [search_tree]self.input_colors[cloud_split] += [sub_colors]if cloud_split in ['training', 'validation']:self.input_labels[cloud_split] += [sub_labels]# Get validation and test re_projection indicesprint('\nPreparing reprojection indices for validation and test')for i, file_path in enumerate(files):# get cloud name and splitcloud_name = file_path.split('/')[-1][:-4]# Validation projection and labelsif file_path in self.val_files:proj_file = join(tree_path, '{:s}_proj.pkl'.format(cloud_name))with open(proj_file, 'rb') as f:proj_idx, labels = pickle.load(f)self.val_proj += [proj_idx]self.val_labels += [labels]# Test projectionif file_path in self.test_files:proj_file = join(tree_path, '{:s}_proj.pkl'.format(cloud_name))with open(proj_file, 'rb') as f:proj_idx, labels = pickle.load(f)self.test_proj += [proj_idx]self.test_labels += [labels]print('finished')return# Generate the input data flowdef get_batch_gen(self, split):if split == 'training':num_per_epoch = cfg.train_steps * cfg.batch_sizeelif split == 'validation':num_per_epoch = cfg.val_steps * cfg.val_batch_sizeelif split == 'test':num_per_epoch = cfg.val_steps * cfg.val_batch_size# Reset possibilityself.possibility[split] = []self.min_possibility[split] = []self.class_weight[split] = []# Random initializefor i, tree in enumerate(self.input_trees[split]):self.possibility[split] += [np.random.rand(tree.data.shape[0]) * 1e-3]self.min_possibility[split] += [float(np.min(self.possibility[split][-1]))]if split != 'test':_, num_class_total = np.unique(np.hstack(self.input_labels[split]), return_counts=True)self.class_weight[split] += [np.squeeze([num_class_total / np.sum(num_class_total)], axis=0)]def spatially_regular_gen():# Generator loopfor i in range(num_per_epoch): # num_per_epoch# Choose the cloud with the lowest probabilitycloud_idx = int(np.argmin(self.min_possibility[split]))# choose the point with the minimum of possibility in the cloud as query pointpoint_ind = np.argmin(self.possibility[split][cloud_idx])# Get all points within the cloud from tree structurepoints = np.array(self.input_trees[split][cloud_idx].data, copy=False)# print("points........." + str(points.shape))# Center point of input regioncenter_point = points[point_ind, :].reshape(1, -1)# Add noise to the center pointnoise = np.random.normal(scale=cfg.noise_init / 10, size=center_point.shape)pick_point = center_point + noise.astype(center_point.dtype)query_idx = self.input_trees[split][cloud_idx].query(pick_point, k=cfg.num_points)[1][0]# Shuffle indexquery_idx = DP.shuffle_idx(query_idx)# Get corresponding points and colors based on the indexqueried_pc_xyz = points[query_idx]queried_pc_xyz[:, 0:2] = queried_pc_xyz[:, 0:2] - pick_point[:, 0:2]queried_pc_colors = self.input_colors[split][cloud_idx][query_idx]if split == 'test':queried_pc_labels = np.zeros(queried_pc_xyz.shape[0])queried_pt_weight = 1else:queried_pc_labels = self.input_labels[split][cloud_idx][query_idx]queried_pc_labels = np.array([self.label_to_idx[l] for l in queried_pc_labels])queried_pt_weight = np.array([self.class_weight[split][0][n] for n in queried_pc_labels])# Update the possibility of the selected pointsdists = np.sum(np.square((points[query_idx] - pick_point).astype(np.float32)), axis=1)delta = np.square(1 - dists / np.max(dists)) * queried_pt_weightself.possibility[split][cloud_idx][query_idx] += deltaself.min_possibility[split][cloud_idx] = float(np.min(self.possibility[split][cloud_idx]))if True:yield (queried_pc_xyz,queried_pc_colors.astype(np.float32),queried_pc_labels,query_idx.astype(np.int32),np.array([cloud_idx], dtype=np.int32))gen_func = spatially_regular_gengen_types = (tf.float32, tf.float32, tf.int32, tf.int32, tf.int32)gen_shapes = ([None, 3], [None, 3], [None], [None], [None])return gen_func, gen_types, gen_shapesdef get_tf_mapping(self):# Collect flat inputsdef tf_map(batch_xyz, batch_features, batch_labels, batch_pc_idx, batch_cloud_idx):batch_features = tf.map_fn(self.tf_augment_input, [batch_xyz, batch_features], dtype=tf.float32)input_points = []input_neighbors = []input_pools = []input_up_samples = []for i in range(cfg.num_layers):neigh_idx = tf.py_func(DP.knn_search, [batch_xyz, batch_xyz, cfg.k_n], tf.int32)sub_points = batch_xyz[:, :tf.shape(batch_xyz)[1] // cfg.sub_sampling_ratio[i], :]pool_i = neigh_idx[:, :tf.shape(batch_xyz)[1] // cfg.sub_sampling_ratio[i], :]up_i = tf.py_func(DP.knn_search, [sub_points, batch_xyz, 1], tf.int32)input_points.append(batch_xyz)input_neighbors.append(neigh_idx)input_pools.append(pool_i)input_up_samples.append(up_i)batch_xyz = sub_pointsinput_list = input_points + input_neighbors + input_pools + input_up_samplesinput_list += [batch_features, batch_labels, batch_pc_idx, batch_cloud_idx]return input_listreturn tf_map# data augmentation@staticmethoddef tf_augment_input(inputs):xyz = inputs[0]features = inputs[1]theta = tf.random_uniform((1,), minval=0, maxval=2 * np.pi)# Rotation matricesc, s = tf.cos(theta), tf.sin(theta)cs0 = tf.zeros_like(c)cs1 = tf.ones_like(c)R = tf.stack([c, -s, cs0, s, c, cs0, cs0, cs0, cs1], axis=1)stacked_rots = tf.reshape(R, (3, 3))# Apply rotationstransformed_xyz = tf.reshape(tf.matmul(xyz, stacked_rots), [-1, 3])# Choose random scales for each examplemin_s = cfg.augment_scale_minmax_s = cfg.augment_scale_maxif cfg.augment_scale_anisotropic:s = tf.random_uniform((1, 3), minval=min_s, maxval=max_s)else:s = tf.random_uniform((1, 1), minval=min_s, maxval=max_s)symmetries = []for i in range(3):if cfg.augment_symmetries[i]:symmetries.append(tf.round(tf.random_uniform((1, 1))) * 2 - 1)else:symmetries.append(tf.ones([1, 1], dtype=tf.float32))s *= tf.concat(symmetries, 1)# Create N x 3 vector of scales to multiply with stacked_pointsstacked_scales = tf.tile(s, [tf.shape(transformed_xyz)[0], 1])# Apply scalestransformed_xyz = transformed_xyz * stacked_scalesnoise = tf.random_normal(tf.shape(transformed_xyz), stddev=cfg.augment_noise)transformed_xyz = transformed_xyz + noise# rgb = features[:, :3]# stacked_features = tf.concat([transformed_xyz, rgb], axis=-1)return transformed_xyzdef init_input_pipeline(self):print('Initiating input pipelines')cfg.ignored_label_inds = [self.label_to_idx[ign_label] for ign_label in self.ignored_labels]gen_function, gen_types, gen_shapes = self.get_batch_gen('training')gen_function_val, _, _ = self.get_batch_gen('validation')gen_function_test, _, _ = self.get_batch_gen('test')self.train_data = tf.data.Dataset.from_generator(gen_function, gen_types, gen_shapes)self.val_data = tf.data.Dataset.from_generator(gen_function_val, gen_types, gen_shapes)self.test_data = tf.data.Dataset.from_generator(gen_function_test, gen_types, gen_shapes)self.batch_train_data = self.train_data.batch(cfg.batch_size)self.batch_val_data = self.val_data.batch(cfg.val_batch_size)self.batch_test_data = self.test_data.batch(cfg.val_batch_size)map_func = self.get_tf_mapping()self.batch_train_data = self.batch_train_data.map(map_func=map_func)self.batch_val_data = self.batch_val_data.map(map_func=map_func)self.batch_test_data = self.batch_test_data.map(map_func=map_func)self.batch_train_data = self.batch_train_data.prefetch(cfg.batch_size)self.batch_val_data = self.batch_val_data.prefetch(cfg.val_batch_size)self.batch_test_data = self.batch_test_data.prefetch(cfg.val_batch_size)iter = tf.data.Iterator.from_structure(self.batch_train_data.output_types, self.batch_train_data.output_shapes)self.flat_inputs = iter.get_next()self.train_init_op = iter.make_initializer(self.batch_train_data)self.val_init_op = iter.make_initializer(self.batch_val_data)self.test_init_op = iter.make_initializer(self.batch_test_data)if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--gpu', type=int, default=0, help='the number of GPUs to use [default: 0]')parser.add_argument('--mode', type=str, default='train', help='options: train, test, vis')parser.add_argument('--model_path', type=str, default='None', help='pretrained model path')FLAGS = parser.parse_args()GPU_ID = FLAGS.gpuos.environ["CUDA_DEVICE_ORDER"] = "PCI_BUS_ID"os.environ['CUDA_VISIBLE_DEVICES'] = str(GPU_ID)os.environ['TF_CPP_MIN_LOG_LEVEL'] = '2'Mode = FLAGS.modedataset = Railway()dataset.init_input_pipeline()if Mode == 'train':model = Network(dataset, cfg)model.train(dataset)elif Mode == 'test':cfg.saving = Falsemodel = Network(dataset, cfg)if FLAGS.model_path is not 'None':chosen_snap = FLAGS.model_pathelse:chosen_snapshot = -1logs = np.sort([os.path.join('results', f) for f in os.listdir('results') if f.startswith('Log')])chosen_folder = logs[-1]snap_path = join(chosen_folder, 'snapshots')snap_steps = [int(f[:-5].split('-')[-1]) for f in os.listdir(snap_path) if f[-5:] == '.meta']chosen_step = np.sort(snap_steps)[-1]chosen_snap = os.path.join(snap_path, 'snap-{:d}'.format(chosen_step))print(".............. chosen_snap:" + chosen_snap)tester = ModelTester(model, dataset, restore_snap=chosen_snap)tester.test(model, dataset)else:################### Visualize data ###################with tf.Session() as sess:sess.run(tf.global_variables_initializer())sess.run(dataset.train_init_op)while True:flat_inputs = sess.run(dataset.flat_inputs)pc_xyz = flat_inputs[0]sub_pc_xyz = flat_inputs[1]labels = flat_inputs[21]Plot.draw_pc_sem_ins(pc_xyz[0, :, :], labels[0, :])Plot.draw_pc_sem_ins(sub_pc_xyz[0, :, :], labels[0, 0:np.shape(sub_pc_xyz)[1]])- 开始训练
python main_Sample.py --mode train --gpu 0
参考
- https://github.com/QingyongHu/RandLA-Net
- https://blog.csdn.net/weixin_40653140/article/details/130285289

相关文章:
RandLA-Net 训练自定义数据集
https://arxiv.org/abs/1911.11236 搭建训练环境 git clone https://github.com/QingyongHu/RandLA-Net.git搭建 python 环境 , 这里我用的 3.9conda create -n randlanet python3.9 source activate randlanet pip install tensorflow2.15.0 -i https://pypi.tuna.tsinghua.e…...

洛谷 B3642:二叉树的遍历 ← 结构体方法 链式前向星方法
【题目来源】https://www.luogu.com.cn/problem/B3642【题目描述】 有一个 n(n≤10^6) 个结点的二叉树。给出每个结点的两个子结点编号(均不超过 n),建立一棵二叉树(根结点的编号为 1),如果是叶子结点&…...

飞腾+FPGA多U多串全国产工控主机
飞腾多U多串工控主机基于国产化飞腾高性能8核D2000处理器平台的国产自主可控解决方案,搭载国产化固件,支持UOS、银河麒麟等国产操作系统,满足金融系统安全运算需求,实现从硬件、操作系统到应用的完全国产、自主、可控,是国产金融信…...

uni-app实现页面通信EventChannel
uni-app实现页面通信EventChannel 之前使用了EventBus的方法实现不同页面组件之间的一个通信,在uni-app中,我们也可以使用uni-app API —— uni.navigateTo来实现页面间的通信。注:2.8.9 支持页面间事件通信通道。 1. 向被打开页面传送数据…...

等保系列之——网络安全等级保护测评工作流程及工作内容
#等保测评##网络安全# 一、网络安全等级保护测评过程概述 网络安全等级保护测评工作过程包括四个基本测评活动:测评准备活动、方案编制活动、现场测评活动、报告编制活动。而测评相关方之间的沟通与洽谈应贯穿整个测评过程。每一项活动有一定的工作任务。如下表。…...

自然语言处理中的BERT模型深度剖析
自然语言处理(NLP)是人工智能领域的一个重要分支,它致力于让计算机理解和生成人类语言。近年来,BERT(Bidirectional Encoder Representations from Transformers)模型的出现,极大地推动了NLP领域…...
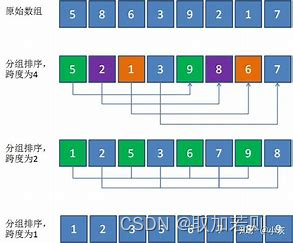
数据结构:希尔排序
文章目录 前言一、排序的概念及其运用二、常见排序算法的实现 1.插入排序2.希尔排序总结 前言 排序在生活中有许多实际的运用。以下是一些例子: 购物清单:当我们去超市购物时,通常会列出一份购物清单。将购物清单按照需要购买的顺序排序&…...

unicloud 云对象
背景和优势 20年前,restful接口开发开始流行,服务器编写接口,客户端调用接口,传输json。 现在,替代restful的新模式来了。 云对象,服务器编写API,客户端调用API,不再开发传输json…...

【车载开发系列】常用专业术语汇总
【车载开发系列】常用专业词汇汇总 英语全称说明详细HILSHardware In the Loop Simulation车硬件仿真模拟器精密仪器,价格昂贵,机能测试时一定要小心使用。使用简易HILS不能模拟电气故障。要模拟电气故障需要外接故障BoxLSBLeast Significant Bit单位精…...

如何实现Docker容器的自动化升级:不再为手动更新烦恼!
要升级 Docker 容器,你可以按照以下步骤操作,这些步骤涵盖了从拉取最新镜像到重启容器的整个过程。 步骤一:拉取最新的镜像 首先,确保你有最新版本的镜像。例如,如果你要升级一个 Spring Boot 应用的镜像,…...

SwiftUI 5.0(iOS 17)进一步定制 TipKit 外观让撸码如虎添翼
概览 在之前 SwiftUI 5.0(iOS 17)TipKit 让用户更懂你的 App 这篇博文里,我们已经初步介绍过了 TipKit 的基本知识。 现在,让我们来看看如何进一步利用 SwiftUI 对 TipKit 提供的细粒度外观定制技巧,让 Tip 更加“明眸…...
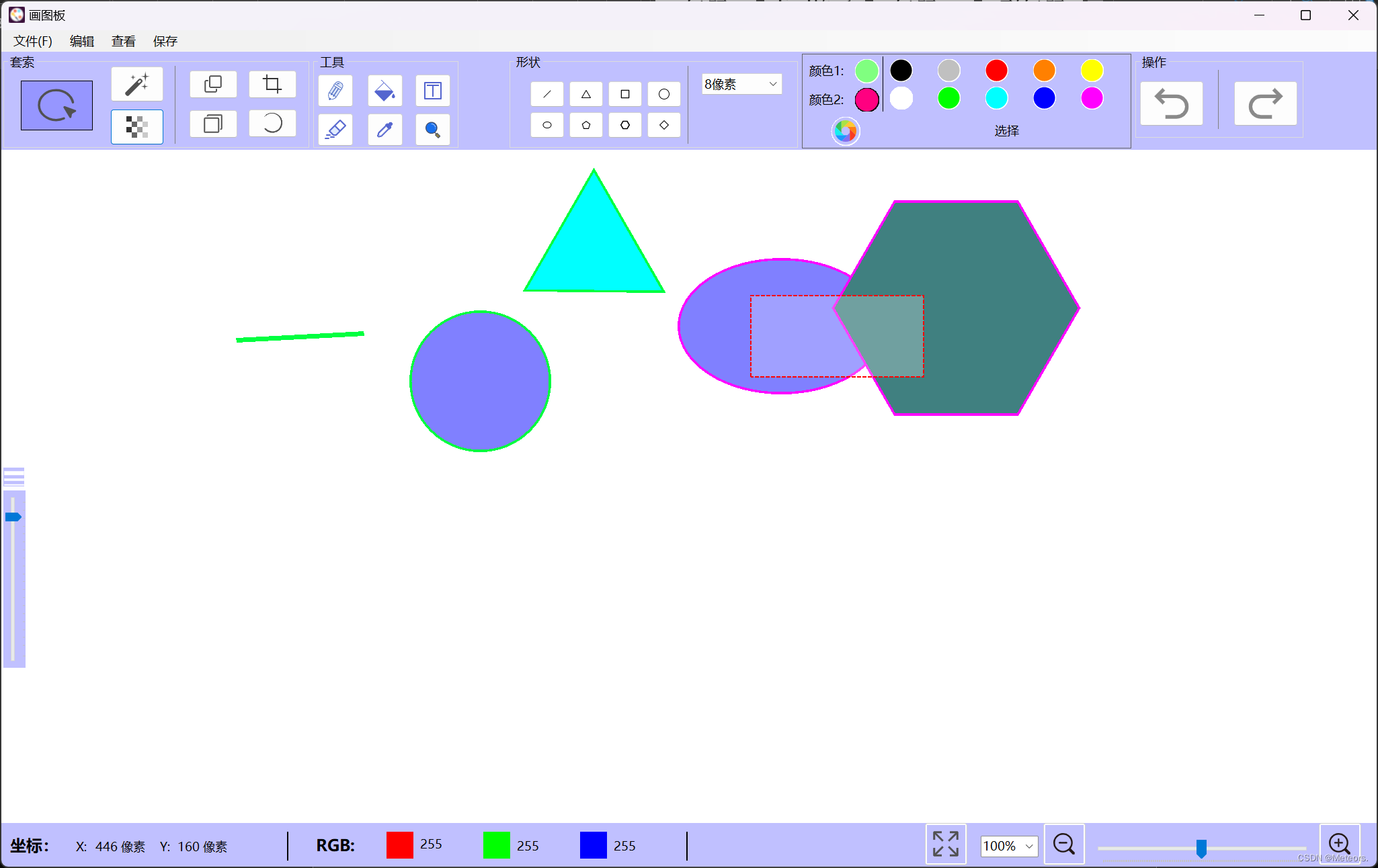
使用C#实现VS窗体应用——画图板
✅作者简介:大家好,我是 Meteors., 向往着更加简洁高效的代码写法与编程方式,持续分享Java技术内容。🍎个人主页:Meteors.的博客💞当前专栏:小项目✨特色专栏: 知识分享🥭…...
)
flutter 自定义本地化-GlobalMaterialLocalizations(重写本地化日期转换)
1. 创建自定义 GlobalMaterialLocalizations import package:flutter_localizations/flutter_localizations.dart; import package:kittlenapp/utils/base/date_time_util.dart;///[auth] kittlen ///[createTime] 2024-05-31 11:40 ///[description]class MyMaterialLocaliza…...

HTTPS 原理技术
HTTPS原理技术 背景简介原理总结 背景 随着年龄的增长,很多曾经烂熟于心的技术原理已被岁月摩擦得愈发模糊起来,技术出身的人总是很难放下一些执念,遂将这些知识整理成文,以纪念曾经努力学习奋斗的日子。本文内容并非完全原创&am…...

Linux基础指令及其作用之压缩与解压
压缩与解压targzip示例输出解释 gunzipzipunzip 压缩与解压 tar tar xzf 是一个常用的命令组合,用于解压缩由 gzip 压缩的 tarball 文件。下面是对这个命令的详细说明: tar:这是一个用于在 Linux 和类 Unix 系统上创建、查看或提取归档文件…...
ORA-08189: 因为未启用行移动功能, 不能闪回表问题
在执行闪回恢复误删数据出现“ORA-08189: 因为未启用行移动功能, 不能闪回表”的错误提示。 ORA-08189 错误表示你尝试对一个表执行闪回操作,但该表没有启用行移动(ROW MOVEMENT)功能。行移动是Oracle中的一个特性,它允许表中的行…...
html+CSS部分基础运用9
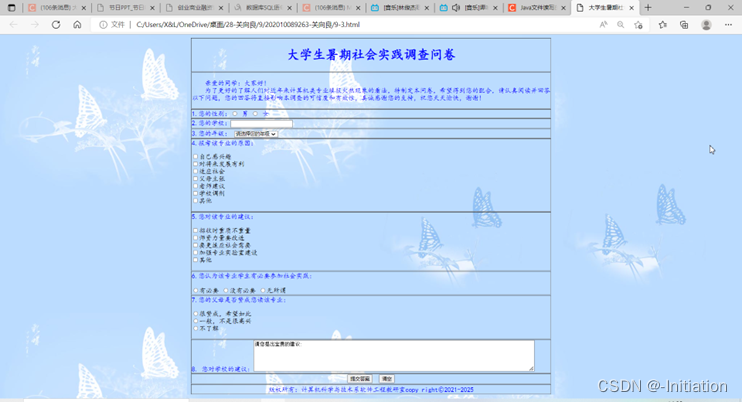
项目1 参会注册表 1.设计参会注册表页面,效果如图9-1所示。 图9-1 参会注册表页面 项目2 设计《大学生暑期社会实践调查问卷》 1.设计“大学生暑期社会实践调查问卷”页面,如图9-2所示。 图9-2 大学生暑期社会调查表页面 2.调查表前导语的…...

五大元素之一,累不累——Java内部类
目录 简略版: 详解版: 使用场景: 内部类的优点: 内部类的分类: 一. 成员内部类 1.创建对象 2.访问方法 3. 外部类名.this. 二. 静态内部类 1. 创建对象 2. 访问特点 三. 局部内部类 四. 匿名内部类 …...
YAML快速编写示例
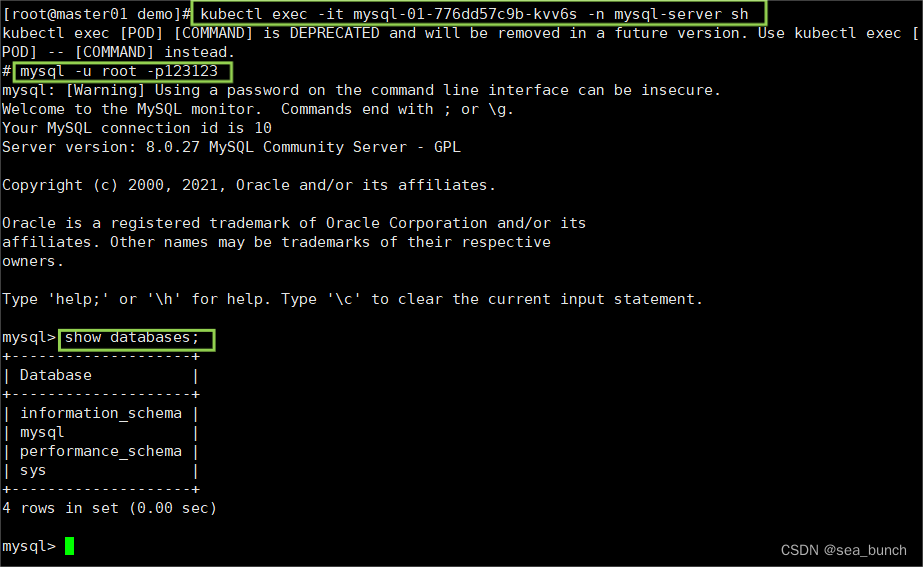
一、案例 1.1 自主式创建service关联上方的pod 资源名称my-nginx-kkk命名空间my-kkk容器镜像nginx:1.21容器端口80标签njzb:my-kkk 1.1.1 创建一个demo文件夹 1.1.2 创建并获取模版文件 1.1.3 查看服务并编写yaml文件 1.1.4 编写yaml文件并部署,查看服务是否运行成…...
)
2024 江苏省大学生程序设计大赛 2024 Jiangsu Collegiate Programming Contest(FGKI)
题目来源:https://codeforces.com/gym/105161 文章目录 F - Download Speed Monitor题意思路编程 G - Download Time Monitor题意思路编程 K - Number Deletion Game题意思路编程 I - Integer Reaction题意思路编程 写在前面:今天打的训练赛打的很水&…...

React 第五十五节 Router 中 useAsyncError的使用详解
前言 useAsyncError 是 React Router v6.4 引入的一个钩子,用于处理异步操作(如数据加载)中的错误。下面我将详细解释其用途并提供代码示例。 一、useAsyncError 用途 处理异步错误:捕获在 loader 或 action 中发生的异步错误替…...
)
python爬虫:Newspaper3k 的详细使用(好用的新闻网站文章抓取和解析的Python库)
更多内容请见: 爬虫和逆向教程-专栏介绍和目录 文章目录 一、Newspaper3k 概述1.1 Newspaper3k 介绍1.2 主要功能1.3 典型应用场景1.4 安装二、基本用法2.2 提取单篇文章的内容2.2 处理多篇文档三、高级选项3.1 自定义配置3.2 分析文章情感四、实战案例4.1 构建新闻摘要聚合器…...

【git】把本地更改提交远程新分支feature_g
创建并切换新分支 git checkout -b feature_g 添加并提交更改 git add . git commit -m “实现图片上传功能” 推送到远程 git push -u origin feature_g...

【学习笔记】深入理解Java虚拟机学习笔记——第4章 虚拟机性能监控,故障处理工具
第2章 虚拟机性能监控,故障处理工具 4.1 概述 略 4.2 基础故障处理工具 4.2.1 jps:虚拟机进程状况工具 命令:jps [options] [hostid] 功能:本地虚拟机进程显示进程ID(与ps相同),可同时显示主类&#x…...
的原因分类及对应排查方案)
JVM暂停(Stop-The-World,STW)的原因分类及对应排查方案
JVM暂停(Stop-The-World,STW)的完整原因分类及对应排查方案,结合JVM运行机制和常见故障场景整理而成: 一、GC相关暂停 1. 安全点(Safepoint)阻塞 现象:JVM暂停但无GC日志,日志显示No GCs detected。原因:JVM等待所有线程进入安全点(如…...
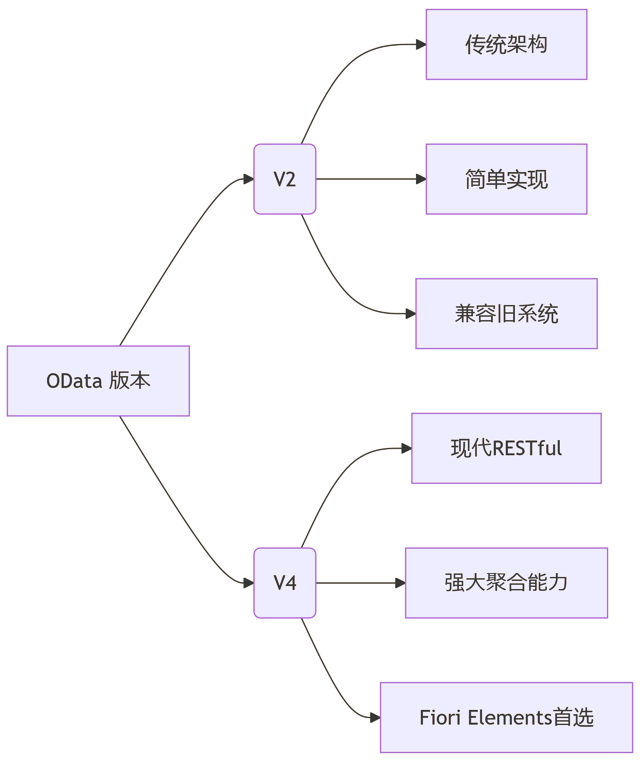
SAP学习笔记 - 开发26 - 前端Fiori开发 OData V2 和 V4 的差异 (Deepseek整理)
上一章用到了V2 的概念,其实 Fiori当中还有 V4,咱们这一章来总结一下 V2 和 V4。 SAP学习笔记 - 开发25 - 前端Fiori开发 Remote OData Service(使用远端Odata服务),代理中间件(ui5-middleware-simpleproxy)-CSDN博客…...

蓝桥杯 冶炼金属
原题目链接 🔧 冶炼金属转换率推测题解 📜 原题描述 小蓝有一个神奇的炉子用于将普通金属 O O O 冶炼成为一种特殊金属 X X X。这个炉子有一个属性叫转换率 V V V,是一个正整数,表示每 V V V 个普通金属 O O O 可以冶炼出 …...
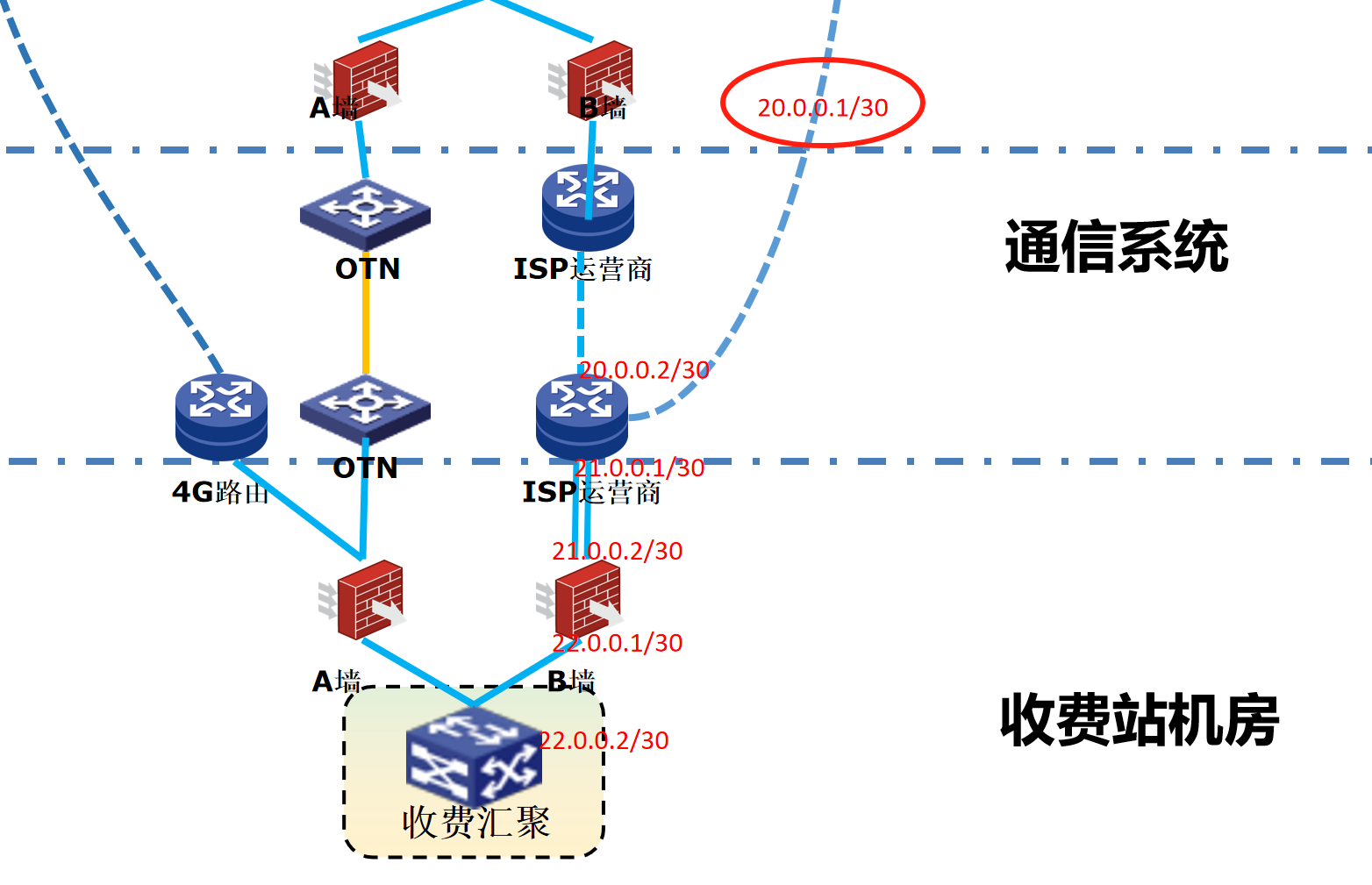
浪潮交换机配置track检测实现高速公路收费网络主备切换NQA
浪潮交换机track配置 项目背景高速网络拓扑网络情况分析通信线路收费网络路由 收费汇聚交换机相应配置收费汇聚track配置 项目背景 在实施省内一条高速公路时遇到的需求,本次涉及的主要是收费汇聚交换机的配置,浪潮网络设备在高速项目很少,通…...

【Go语言基础【13】】函数、闭包、方法
文章目录 零、概述一、函数基础1、函数基础概念2、参数传递机制3、返回值特性3.1. 多返回值3.2. 命名返回值3.3. 错误处理 二、函数类型与高阶函数1. 函数类型定义2. 高阶函数(函数作为参数、返回值) 三、匿名函数与闭包1. 匿名函数(Lambda函…...
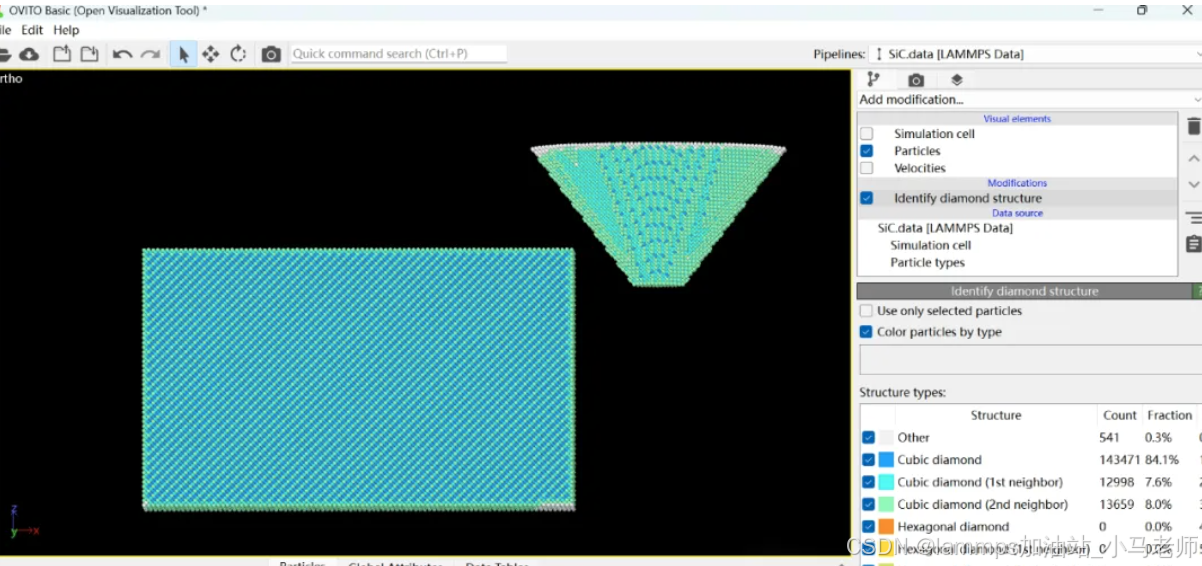
Python Ovito统计金刚石结构数量
大家好,我是小马老师。 本文介绍python ovito方法统计金刚石结构的方法。 Ovito Identify diamond structure命令可以识别和统计金刚石结构,但是无法直接输出结构的变化情况。 本文使用python调用ovito包的方法,可以持续统计各步的金刚石结构,具体代码如下: from ovito…...