45.在ROS中实现global planner(1)
前文move_base介绍(4)简单介绍move_base的全局路径规划配置,接下来我们自己实现一个全局的路径规划
1. move_base规划配置
ROS1的move_base可以配置选取不同的global planner和local planner, 默认move_base.cpp#L70中可以看到是读取该参数决定的`
private_nh.param("base_global_planner", global_planner, std::string("navfn/NavfnROS"));private_nh.param("base_local_planner", local_planner, std::string("base_local_planner/TrajectoryPlannerROS"));
我们可以通过配置base_global_planner和base_local_planner参数修改不同的算法
ros1 navigation中提供了3种base_global_planner, 分别是
navfn/NavfnROSglobal_planner::GlobalPlannercarrot_planner/CarrotPlanner
下面我们自己实现一个全局的路径规划,并在模拟器测试其执行效果
2. 实现原理
2.1 加载对象
private_nh.param("base_global_planner", global_planner, std::string("navfn/NavfnROS"));
上面我们已经知道 通过参数配置来决定加载哪一个全局规划器,继续跟踪可以看到
查看源码 move_base.cpp#L125 & move_base.h#L210
pluginlib::ClassLoader<nav_core::BaseGlobalPlanner> bgp_loader_;
planner_ = bgp_loader_.createInstance(global_planner);
pluginlib可以参见这里
pluginlib::ClassLoader<nav_core::BaseGlobalPlanner>::createInstance根据输入参数名,加载so,并且获取到库的导出类,且创建该类的一个实例planner_即为该指向该实例的指针, 有了这个对象,就可以通过该成员干活了
2.2 BaseGlobalPlanner接口
planner_定义在move_base.h#L185
boost::shared_ptr<nav_core::BaseGlobalPlanner> planner_;
前面返回的planner_类型可以看到是nav_core::BaseGlobalPlanner类型,我们先来看下该类,在nav_core#L48
class BaseGlobalPlanner{public:virtual bool makePlan(const geometry_msgs::PoseStamped& start, const geometry_msgs::PoseStamped& goal, std::vector<geometry_msgs::PoseStamped>& plan) = 0;virtual bool makePlan(const geometry_msgs::PoseStamped& start, const geometry_msgs::PoseStamped& goal, std::vector<geometry_msgs::PoseStamped>& plan,double& cost){cost = 0;return makePlan(start, goal, plan);}virtual void initialize(std::string name, costmap_2d::Costmap2DROS* costmap_ros) = 0;virtual ~BaseGlobalPlanner(){}protected:BaseGlobalPlanner(){}};
可以看到该类是一个接口类,需要继承该接口做相应的实现,主要接口比较简单,就两个, initialize和makePlan, 顾名思义一个初始化,一个规划路径
initialize
传入了name, 以及地图信息makePlan
传入起点,目标点,返回plan
我们也可以看看在move_base对应接口的调用
-
move_base.cpp#L126
在创建完成立即调用完成初始化 -
move_base.cpp#L496
进行全局路径规划
if(!planner_->makePlan(start, goal, plan) || plan.empty()){...}
``
在MoveBase::makeplan调用了该函数,返回的plan, 保存后用于local planner的输入
3. 实现global planner
3.1 实现步骤
实现一个自己的全局规划需要下面几个步骤
- 继承
nav_core::BaseGlobalPlanner实现接口 - 导出该实现类
- 添加
plugin.xml插件描述文件并导出 - 修改
move_base配置使用
3.2 实现接口
- 创建包
mkdir -p ~/pibot_ros/ros_ws/src
cd ~/pibot_ros/ros_ws/src
catkin_create_pkg sample_global_planner
创建完成添加一个cpp和h文件,新增一个类继承与nav_core::BaseGlobalPlanner
上面已经看到该接口定义 我们继承并对两个接口initialize和makePlan实现即可
initialize
初始化我们暂时先空实现
void GlobalPlanner::initialize(std::string name, costmap_2d::Costmap2DROS *costmap_ros)
{
}
makePlan
规划路径的接口给我们输入起点和终点,我们输出规划出的plan(如可以规划,同时返回true,反之返回false), 我们暂时不考虑具体实现,输出一条从起点到终点的直线路径,这应该是初中几何知识,比较简单如下
bool GlobalPlanner::makePlan(const geometry_msgs::PoseStamped &start,const geometry_msgs::PoseStamped &goal, std::vector<geometry_msgs::PoseStamped> &plan)
{ROS_INFO("make plan start:[%f %f], goal:[%f %f]", start.pose.position.x, start.pose.position.y, goal.pose.position.x, goal.pose.position.y);plan.clear();float yaw = atan2(goal.pose.position.y - start.pose.position.y, goal.pose.position.x - start.pose.position.x);int n = 0;float goal_distance = sqrt(pow((start.pose.position.x - goal.pose.position.x), 2) + pow((start.pose.position.y - goal.pose.position.y), 2));float delta = 0.1; // 间隔delta输出start至end的直线上的点 我们间隔0.1取直线上的所有点,放到输出的参数plan里while (n * delta < goal_distance){geometry_msgs::PoseStamped pose = goal;pose.pose.position.x = (n * delta) * cos(yaw) + start.pose.position.x;pose.pose.position.y = (n * delta) * sin(yaw) + start.pose.position.y;++n;plan.push_back(pose);}plan.push_back(goal); // 这里别忘了终点return !plan.empty();
}
- 添加相应的CMakeList.txt
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(include${catkin_INCLUDE_DIRS}
)## Declare a C++ library
add_library(${PROJECT_NAME}src/planner_node.cpp
)## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(${PROJECT_NAME} ${catkin_LIBRARIES})
3.3 导出类
参考navigation里面, 添加宏导出该类
PLUGINLIB_EXPORT_CLASS(sample_global_planner::GlobalPlanner, nav_core::BaseGlobalPlanner)
3.3 添加plugin.xml
添加一个bgp_plugin.xml
<library path="lib/libsample_global_planner"><class name="sample_global_planner/GlobalPlanner" type="sample_global_planner::GlobalPlanner" base_class_type="nav_core::BaseGlobalPlanner"><description>A sample implementation of a grid based planner </description></class>
</library>
3.4 编译
cd ~/pibot_ros/ros_ws
catkin_make
3.5 修改配置测试
修改~/pibot_ros/src/pibot_simulator/move_base_params.yaml
# base_global_planner: global_planner/GlobalPlanner
base_global_planner: sample_global_planner/GlobalPlanner
global_planner/GlobalPlanner ----> sample_global_planner/GlobalPlanner
- 启动模拟器
pibot_simulator
- 查看当前的
global_planner
❯ rosparam get /move_base/base_global_planner
sample_global_planner/GlobalPlanner # 输出sample_global_planner/GlobalPlanner表示插件已经被正确加载
- 启动rviz发送点位,选点导航测试
pibot_view
3.6 路径显示
上面测试可以看到可以规划已经完成, dwa的局部规划已经启动, 为了方便查看全局全规划路径的输出,我们在makeplan完成后发出path的topic
void GlobalPlanner::publishPlan(const std::vector<geometry_msgs::PoseStamped> &path)
{nav_msgs::Path gui_path;gui_path.poses.resize(path.size());gui_path.header.frame_id = frame_id_;gui_path.header.stamp = ros::Time::now();for (unsigned int i = 0; i < path.size(); i++){gui_path.poses[i] = path[i];}plan_pub_.publish(gui_path);
}
把 rviz
Global Map和Local Map中的dwa planner关闭, 只显示Full Plan
修改
move_base_params.yaml中planner_frequency值, 0 只规划一次, >0 规划频率
3.7 测试结果
- 选择空旷区域,可以看到可以正常规划,同时控制也可以启动完成,到达目的地

- 跨过障碍物,可以看到规划出路径,显然无法控制过去

4. 总结
本文简单实现了一个global planner的插件,显然实际没啥用,不过可以作为一个模板,基于该模板实现自己的算法。后面我们将基于该模板实现可用的全局规划。
本文代码见sample_global_planner
相关文章:
45.在ROS中实现global planner(1)
前文move_base介绍(4)简单介绍move_base的全局路径规划配置,接下来我们自己实现一个全局的路径规划 1. move_base规划配置 ROS1的move_base可以配置选取不同的global planner和local planner, 默认move_base.cpp#L70中可以看到是…...
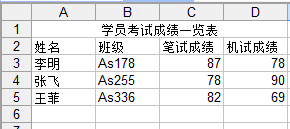
Java中导入、导出Excel——HSSFWorkbook 使用
一、介绍 当前B/S模式已成为应用开发的主流,而在企业办公系统中,常常有客户这样子要求:你要把我们的报表直接用Excel打开(电信系统、银行系统)。或者是:我们已经习惯用Excel打印。这样在我们实际的开发中,很多时候需要…...

c#数据结构-列表
列表 数组可以管理大量数组,但缺点是无法更变容量。 创建小了不够用,创建大了浪费空间。 无法预测需要多少大小的时候,可能范围越大,就会浪费越多的空间。 所以,你可能会想要一种可以扩容的东西,代替数组…...
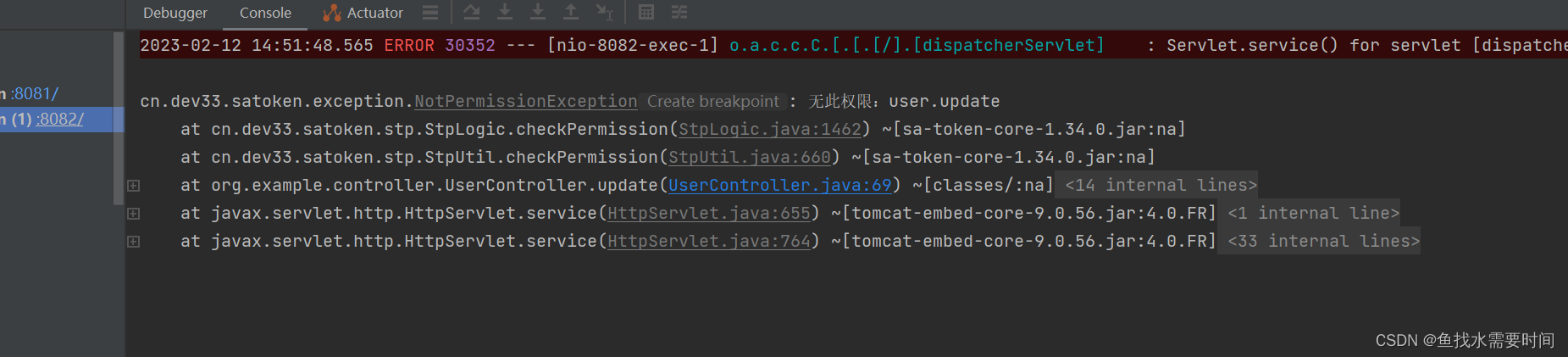
Sa-Token实现分布式登录鉴权(Redis集成 前后端分离)
文章目录1. Sa-Token 介绍2. 登录认证2.1 登录与注销2.2 会话查询2.3 Token 查询3. 权限认证3.1 获取当前账号权限码集合3.2 权限校验3.3 角色校验4. 前后台分离(无Cookie模式)5. Sa-Token 集成 Redis6. SpringBoot 集成 Sa-Token6.1 创建项目6.2 添加依…...

leaflet显示高程
很多地图软件都能随鼠标移动动态显示高程。这里介绍一种方法,我所得出的。1 下载高程数据一般有12.5m数据下载,可惜精度根本不够,比如mapbox的免费在线的,或者91卫图提供百度网盘打包下载的,没法用,差距太大…...
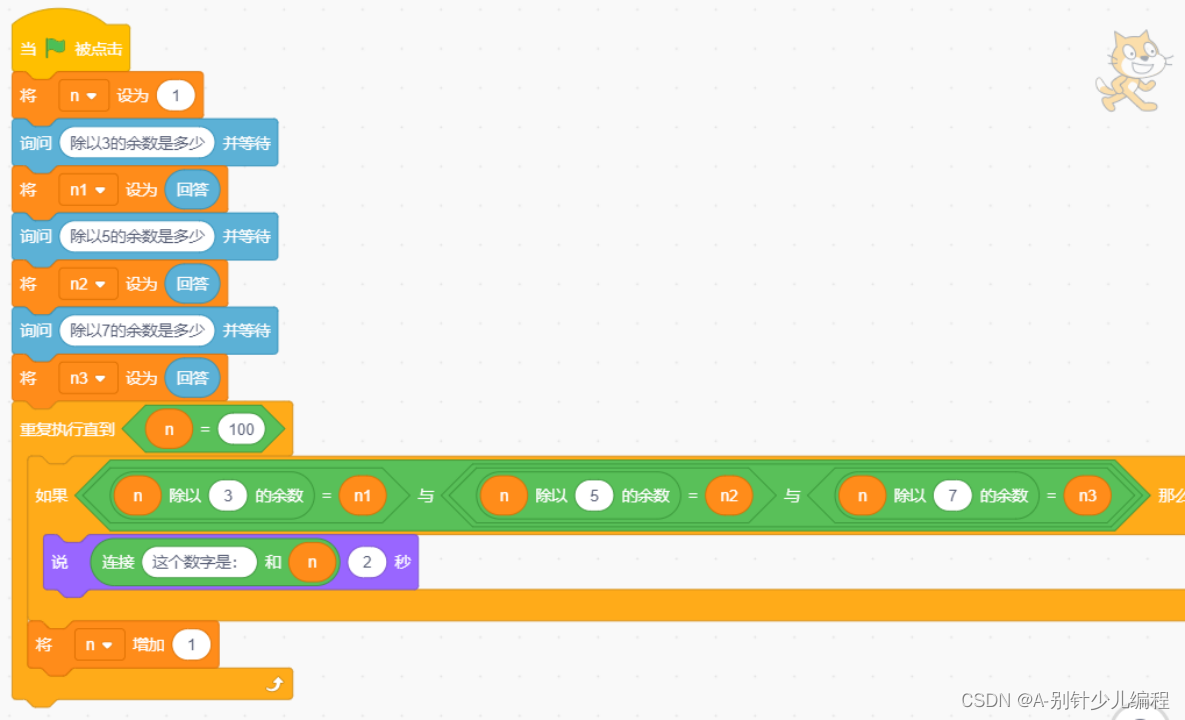
电子学会2022年12月青少年软件编程(图形化)等级考试试卷(三级)答案解析
目录 一、单选题(共25题,共50分) 二、判断题(共10题,共20分) 三、编程题(共3题,共30分) 青少年软件编程(图形化)等级考试试卷(三级) 一、单选题(共25题,共50分) 1. 默认小猫角色…...
ubuntu 驱动更新后导致无法进入界面
**问题描述: **安装新ubuntu系统后未禁止驱动更新导致无法进入登录界面。 解决办法: 首先在进入BIOS中,修改设置以进行命令行操作,然后卸载已有的系统驱动,最后安装新的驱动即可。 开机按F11进入启动菜单栏…...
解决访问GitHub时出现的“您的连接不是私密连接”的问题!
Content问题描述解决办法问题描述 访问github出现您的连接不是私密连接问题,无法正常访问,如下图所示: 解决办法 修改hosts文件。hosts文件位于:C:\Windows\System32\drivers\etc\hosts 首先在https://www.ipaddress.com/查找两…...
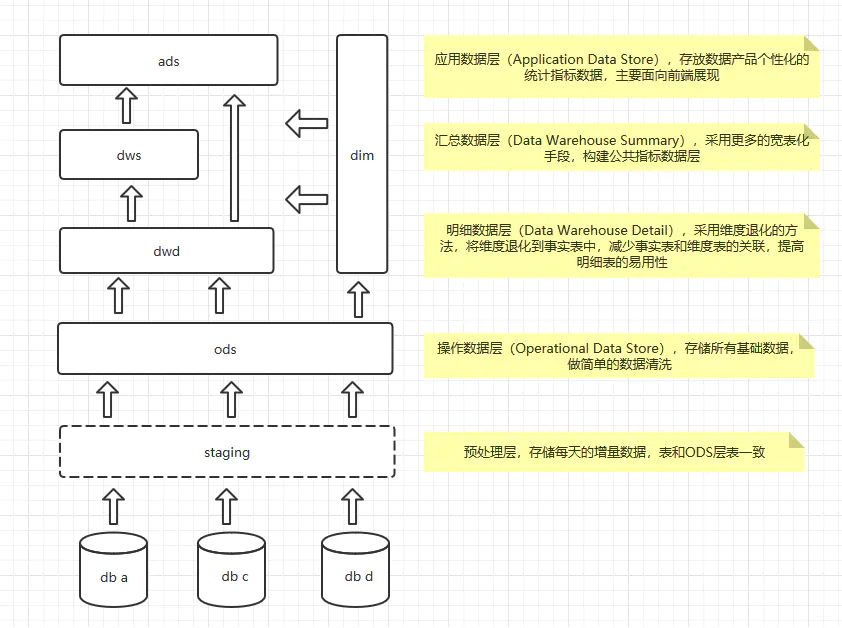
初识数据仓库
一、什么是数据仓库数据库 --> OLTP:(on-line transaction processing)翻译为联机事务处理记录某类业务事件的发生,如购买行为,银行交易行为,当行为产生后,系统会记录是谁在何时何地做了何事…...

FilenameUtils工具类部分源码自研
FilenameUtils工具类部分源码自研getExtension(orgFileName)源码如下逐行分析getExtension(orgFileName)源码如下 public class FilenameUtils {public static int indexOfExtension(String fileName) throws IllegalArgumentException {if (fileName null) {return -1;} els…...
【前端领域】3D旋转超美相册(HTML+CSS)
世界上总有一半人不理解另一半人的快乐。 ——《爱玛》 目录 一、前言 二、本期作品介绍 3D旋转相册 三、效果展示 四、详细介绍 五、编码实现 index.html style.css img 六、获取源码 公众号获取源码 获取源码?私信?关注?点赞&…...

Java——聊聊JUC中的原子变量类
文章目录: 1.什么是原子变量类? 2.AtomicInteger(基本类型原子变量类) 3.AtomicIntegerArray(数组类型原子变量类) 4.AtomicMarkableReference(引用类型原子变量类) 5.AtomicInteger…...
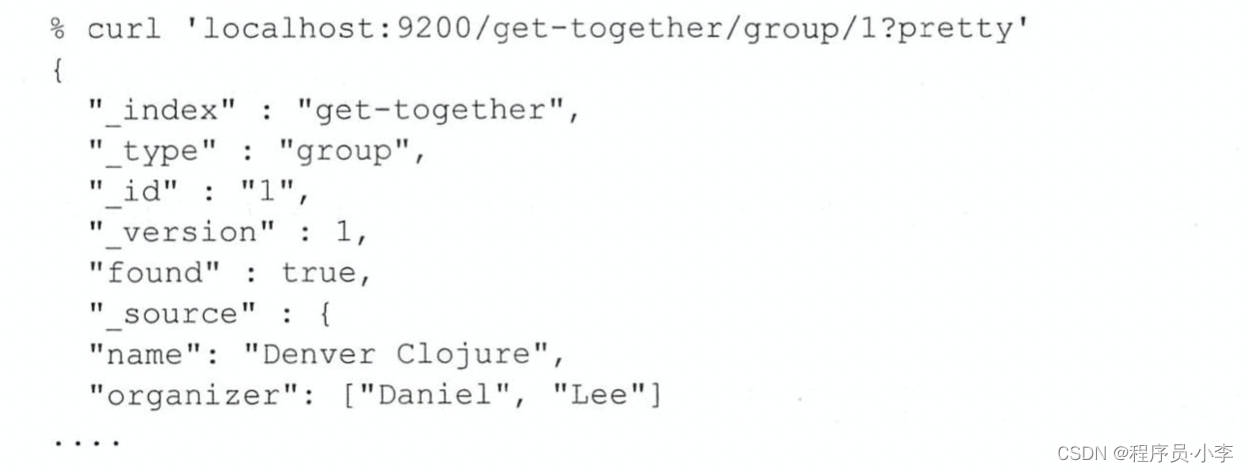
elasticsearch索引与搜索初步
ES支持cURL交互,使用http请求完成索引和搜索操作,最基本的格式如下:创建索引我们可以使用PUT方法创建索引,通过指定“索引”、“类型”、“文档ID”锁定文档,通过参数指定文档的数据。红色部分的路由分别指定了“索引”…...

【Python】多线程与多进程学习笔记
本文是一篇学习笔记,学习内容主要来源于莫凡python的文档:https://mofanpy.com/tutorials/python-basic/threading/thread 多线程 线程基本结构 开启子线程的简单方式如下: import threadingdef thread_job():print(This is a thread of %…...

MySQL基础知识点
1.在Linux上安装好MySQL8.0之后,默认数据目录的具体位置是什么?该目录下都保存哪些数据库组件?在目录/usr/sbin、/usr/bin、/etc、/var/log 分别保存哪些组件? 答:默认数据目录:/var/lib/mysql。保存有mysq…...

代码随想录算法训练营第五十九天| 583. 两个字符串的删除操作、72. 编辑距离
Leetcode - 583dp[i][j]代表以i-1结尾的words1的子串 要变成以j-1结尾的words2的子串所需要的次数。初始化: "" 变成"" 所需0次 dp[0][0] 0, ""变成words2的子串 需要子串的长度的次数,所以dp[0][j] j, 同理,dp[i][0] …...

指针引用字符串问题(详解)
通过指针引用字符串可以更加方便灵活的使用字符串。 字符串的引用方式有两种,下面简单介绍一下这两种方法。 1.用字符数组来存放一个字符串。 1.1 可以通过数组名和下标来引用字符串中的一个字符。 1.2 还可以通过数组名和格式声明符%s输出整个字符串。 具体实…...
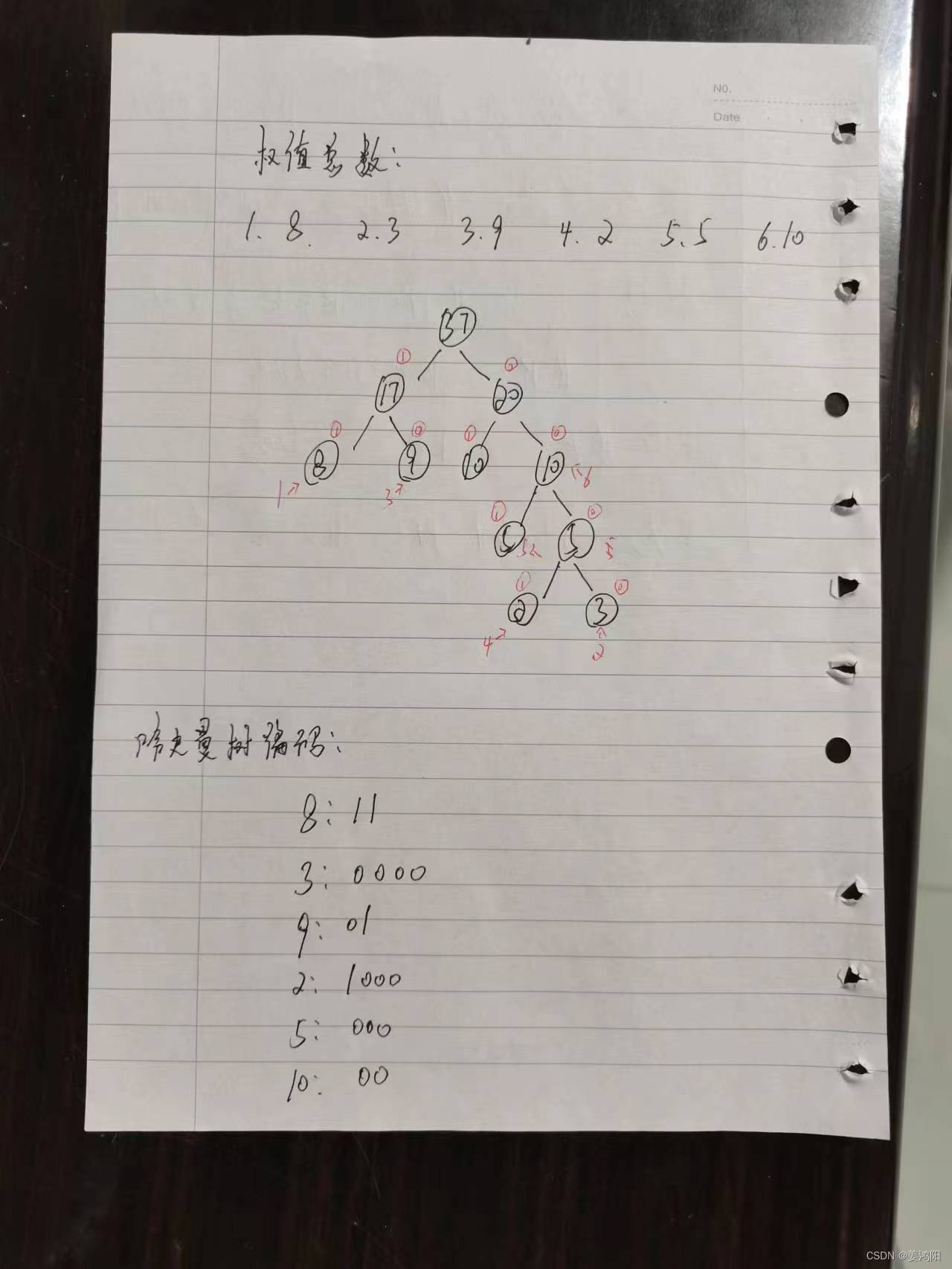
数据结构——哈夫曼树编程,输入权值实现流程图代码
一、须知 本代码是在数据结构——哈夫曼树编程上建立的,使用时需将代码剪切到C等软件中。需要输入权值方可实现流程图,但是还需要按照编程换算出的结果自己用笔画出流程图。 下面将代码粘贴到文章中,同时举一个例子:二、代…...
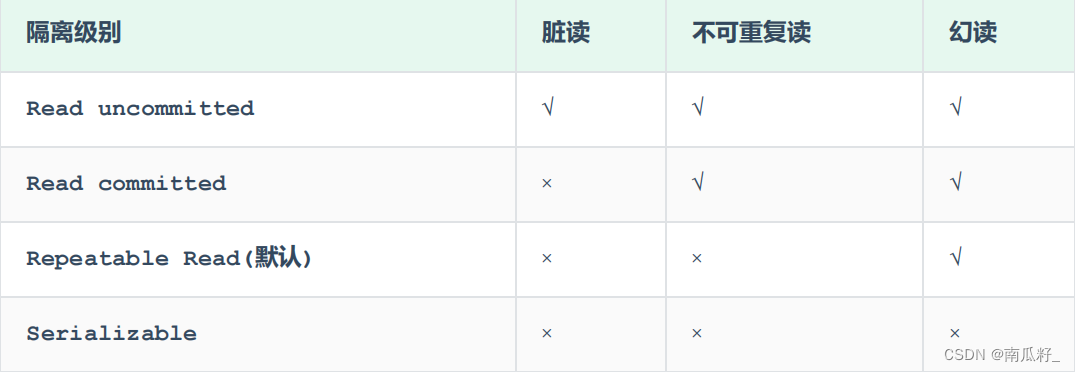
【MySQL】 事务
😊😊作者简介😊😊 : 大家好,我是南瓜籽,一个在校大二学生,我将会持续分享Java相关知识。 🎉🎉个人主页🎉🎉 : 南瓜籽的主页…...
Java测试——selenium常见操作(2)
这篇博客继续讲解一些selenium的常见操作 selenium的下载与准备工作请看之前的博客:Java测试——selenium的安装与使用教程 先创建驱动 ChromeDriver driver new ChromeDriver();等待操作 我们上一篇博客讲到,有些时候代码执行过快,页面…...
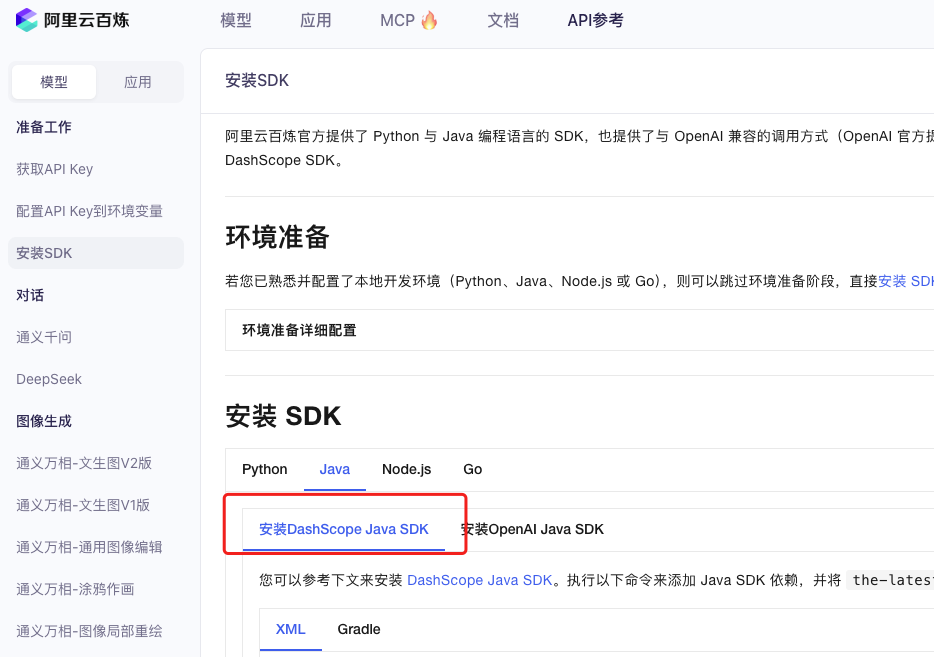
业务系统对接大模型的基础方案:架构设计与关键步骤
业务系统对接大模型:架构设计与关键步骤 在当今数字化转型的浪潮中,大语言模型(LLM)已成为企业提升业务效率和创新能力的关键技术之一。将大模型集成到业务系统中,不仅可以优化用户体验,还能为业务决策提供…...

51c自动驾驶~合集58
我自己的原文哦~ https://blog.51cto.com/whaosoft/13967107 #CCA-Attention 全局池化局部保留,CCA-Attention为LLM长文本建模带来突破性进展 琶洲实验室、华南理工大学联合推出关键上下文感知注意力机制(CCA-Attention),…...
)
rknn优化教程(二)
文章目录 1. 前述2. 三方库的封装2.1 xrepo中的库2.2 xrepo之外的库2.2.1 opencv2.2.2 rknnrt2.2.3 spdlog 3. rknn_engine库 1. 前述 OK,开始写第二篇的内容了。这篇博客主要能写一下: 如何给一些三方库按照xmake方式进行封装,供调用如何按…...

工业安全零事故的智能守护者:一体化AI智能安防平台
前言: 通过AI视觉技术,为船厂提供全面的安全监控解决方案,涵盖交通违规检测、起重机轨道安全、非法入侵检测、盗窃防范、安全规范执行监控等多个方面,能够实现对应负责人反馈机制,并最终实现数据的统计报表。提升船厂…...
HTML 列表、表格、表单
1 列表标签 作用:布局内容排列整齐的区域 列表分类:无序列表、有序列表、定义列表。 例如: 1.1 无序列表 标签:ul 嵌套 li,ul是无序列表,li是列表条目。 注意事项: ul 标签里面只能包裹 li…...
STM32标准库-DMA直接存储器存取
文章目录 一、DMA1.1简介1.2存储器映像1.3DMA框图1.4DMA基本结构1.5DMA请求1.6数据宽度与对齐1.7数据转运DMA1.8ADC扫描模式DMA 二、数据转运DMA2.1接线图2.2代码2.3相关API 一、DMA 1.1简介 DMA(Direct Memory Access)直接存储器存取 DMA可以提供外设…...

2025 后端自学UNIAPP【项目实战:旅游项目】6、我的收藏页面
代码框架视图 1、先添加一个获取收藏景点的列表请求 【在文件my_api.js文件中添加】 // 引入公共的请求封装 import http from ./my_http.js// 登录接口(适配服务端返回 Token) export const login async (code, avatar) > {const res await http…...

Axios请求超时重发机制
Axios 超时重新请求实现方案 在 Axios 中实现超时重新请求可以通过以下几种方式: 1. 使用拦截器实现自动重试 import axios from axios;// 创建axios实例 const instance axios.create();// 设置超时时间 instance.defaults.timeout 5000;// 最大重试次数 cons…...

大模型多显卡多服务器并行计算方法与实践指南
一、分布式训练概述 大规模语言模型的训练通常需要分布式计算技术,以解决单机资源不足的问题。分布式训练主要分为两种模式: 数据并行:将数据分片到不同设备,每个设备拥有完整的模型副本 模型并行:将模型分割到不同设备,每个设备处理部分模型计算 现代大模型训练通常结合…...

MySQL用户和授权
开放MySQL白名单 可以通过iptables-save命令确认对应客户端ip是否可以访问MySQL服务: test: # iptables-save | grep 3306 -A mp_srv_whitelist -s 172.16.14.102/32 -p tcp -m tcp --dport 3306 -j ACCEPT -A mp_srv_whitelist -s 172.16.4.16/32 -p tcp -m tcp -…...