ROS基础学习-ROS通信机制进阶
ROS通信机制进阶
目录
- 0.简介
- 1.常用API
- 1.1 节点初始化函数
- 1.1.1 C++
- 1.1.2 Python
- 1.2 话题与服务相关函数
- 1.2.1 对象获取相关
- 1.2.1.1 C++
- 1.2.1.2 Python
- 1.2.2 订阅对象相关
- 1.2.2.1 C++
- 1.2.2.2 Python
- 1.2.3 服务对象相关函数
- 1.2.3.1 C++
- 1.2.3.2 Python
- 1.2.4 客户端对象相关
- 1.2.4.1 C++
- 1.2.4.2 Python
- 2.回旋函数
- 2.1 C++
- 2.2 Python
- 3.时间
- 3.1 时刻
- 3.1.1 C++
- 3.1.2 Python
- 3.2 持续时间
- 3.3 持续时间与时刻运算
- 3.4 设置运行频率
- 3.5 定时器
0.简介
前面的都是粗粒度的通信框架基础,没有详细介绍涉及的API,也没有封装代码,后面研究更深入的东西。
- ROS常用API
- ROS中自定义头文件与源文件的使用
1.常用API
参考官方API文档或参考源码:
- ROS节点的初始化相关API;
- NodeHandle 的基本使用相关API;
- 话题的发布方,订阅方对象相关API;
- 服务的服务端,客户端对象相关API;
- 时间相关API;
- 日志输出相关API;
- 参数服务器相关API.
另请参考:
http://wiki.ros.org/APIs
https://docs.ros.org/en/api/roscpp/html/
1.1 节点初始化函数
1.1.1 C++
/** @brief ROS初始化函数。* 该函数可以解析并使用节点,* 启动时传入的参数(通过参数设置节点名称、命名空间...) * 该函数有多个重载版本,如果使用NodeHandle建议调用该版本。 * \param argc 参数个数* \param argv 参数列表* \param name 节点名称,需要保证其唯一性,不允许重名节点,不允许包含命名空间* \param options 节点启动选项,被封装进了ros::init_options*/
void init(int &argc, char **argv, const std::string& name, uint32_t options = 0);
1.argc,argv的使用, 如果按照ROS中特定格式传入是实参,那么ROS可以加以使用,比如用来设置全局参数,给节点重命名…
2.options的使用,节点名称需要保证唯一,会导致一个问题,同一个节点不能重复启动
结果:ROS中当有重名的节点启动时,之前的节点会被关闭
需求:特定场景下,需要一个节点多次启动且能正常运行

解决:设置启动项,ros::init_options::AnonymouusName,当创建ROS节点时,会在用户自定义的节点名称后加随机数,从而避免重名问题。
1.1.2 Python
def init_node(name, argv=None, anonymous=False, log_level=None, disable_rostime=False, disable_rosout=False, disable_signals=False, xmlrpc_port=0, tcpros_port=0):"""在ROS msater中注册节点@param name: 节点名称,必须保证节点名称唯一,节点名称中不能使用命名空间(不能包含 '/')@type name: str@param anonymous: 取值为 true 时,为节点名称后缀随机编号@type anonymous: bool"""1.2 话题与服务相关函数
在 roscpp 中,话题和服务的相关对象一般由 NodeHandle 创建。
NodeHandle还有一个重要作用是可以用于设置命名空间,这是以后的重点。
1.2.1 对象获取相关
1.2.1.1 C++
1.对象获取:
/**
*根据话题生成发布对象
*在ROSmaster注册并返回一个发布者对象,该对象可以发布消息
*使用示例如下:
*ros::Publisher pub = handle.advertise<std_msgs::Empty>("my_topic", 1);
* \param topic 发布消息使用的话题
* \param queue_size 等待发送给订阅者的最大消息数量
* \param latch (optional) 如果为 true,该话题发布的最后一条消息将被保存,并且后期当有订阅者连接时会将该消息发送给订阅者
* \return 调用成功时,会返回一个发布对象
*/
template <class M>
Publisher advertise(const std::string& topic, uint32_t queue_size, bool latch = false)latch参数设置为true时,导航时地图发送,设置为true,当有新订阅方订阅时就将地图发布过去。
以静态地图发布为例,,方案1,可以使用固定频率发送地图数据,但是效率底;方案2,可以将地图发布对象对象的latch设置为true,并且发布方只发送一次数据,每当订阅连接时,将地图数据发送给订阅者(只发送一次),这样提高了数据的发送效率。2.消息发布函数:
/**
* 发布消息
*/
template <typename M>
void publish(const M& message) const1.2.1.2 Python
1.对象获取
class Publisher(Topic):"""在ROS master注册为相关话题的发布方"""def __init__(self, name, data_class, subscriber_listener=None, tcp_nodelay=False, latch=False, headers=None, queue_size=None):"""Constructor@param name: 话题名称 @type name: str@param data_class: 消息类型@param latch: 如果为 true,该话题发布的最后一条消息将被保存,并且后期当有订阅者连接时会将该消息发送给订阅者@type latch: bool@param queue_size: 等待发送给订阅者的最大消息数量@type queue_size: int"""
2.消息发布函数:
def publish(self, *args, **kwds):"""发布消息"""
1.2.2 订阅对象相关
1.2.2.1 C++
1.对象获取
/*** \brief 生成某个话题的订阅对象** 该函数将根据给定的话题在ROS master 注册,并自动连接相同主题的发布方,每接收到一条消息,都会调用回调* 函数,并且传入该消息的共享指针,该消息不能被修改,因为可能其他订阅对象也会使用该消息。* * 使用示例如下:void callback(const std_msgs::Empty::ConstPtr相关文章:
ROS基础学习-ROS通信机制进阶
ROS通信机制进阶 目录 0.简介1.常用API1.1 节点初始化函数1.1.1 C++1.1.2 Python1.2 话题与服务相关函数1.2.1 对象获取相关1.2.1.1 C++1.2.1.2 Python1.2.2 订阅对象相关1.2.2.1 C++1.2.2.2 Python1.2.3 服务对象相关函数1.2.3.1 C++1.2.3.2 Python1.2.4 客户端对象相关1.2.4.…...
 and shallowReadonly())
【Vue3】shallowReactive() and shallowReadonly()
历史小剧场 所谓历史,就是过去的事,它的残酷之处在于:无论你哀嚎,悲伤,痛苦,落寞,追悔,它都无法改变。 一具有名的尸体躺在无数无名的尸体上,这就是所谓的霸业。---- 《明…...

【javaEE初阶】
🌈🌈🌈关于java ⚡⚡⚡java的由来 我们这篇文章主要是来介绍javaEE,一般称为java企业版,实际上java的历史可以追溯到上个世纪90年代,当时主要的语言主流的还是C语言和C,但是在那个时期嵌入式初…...
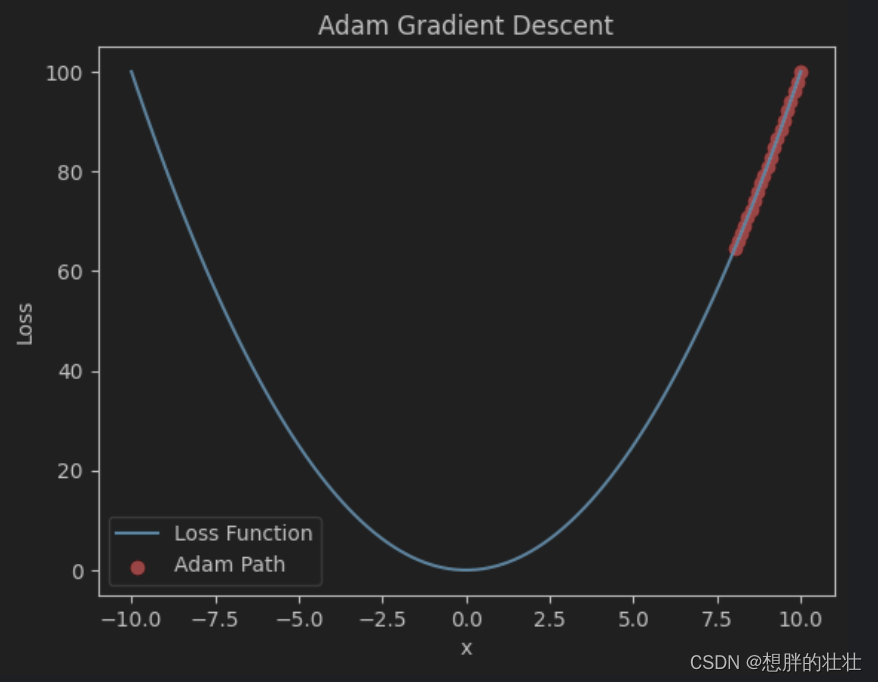
深度学习 - 梯度下降优化方法
梯度下降的基本概念 梯度下降(Gradient Descent)是一种用于优化机器学习模型参数的算法,其目的是最小化损失函数,从而提高模型的预测精度。梯度下降的核心思想是通过迭代地调整参数,沿着损失函数下降的方向前进&#…...

Steam下载游戏很慢?一个设置解决!
博主今天重装系统后,用steam下载发现巨慢 500MB,都要下载半小时。 平时下载软件,一般1分钟就搞定了,于是大致就知道,设置应该出问题了 于是修改了,如下设置之后,速度翻了10倍。 如下&#x…...

51单片机采用定时器T1的方式1的中断计数方式,外接开关K4按4次后,8只LED闪烁不停
1、功能描述 采用定时器T1的方式1的中断计数方式,外接开关K4按4次后,8只LED闪烁不停 2、实验原理 定时器原理:8051的定时器可以用于计数外部事件或执行内部定时操作。在本程序中,定时器1被设置为模式2,即8位自动重装载定时器模式…...

windows系统 flutter 开发环境配置
1、管理员运行powershell,安装:Chocolatey 工具,粘贴复制运行下列脚本: Chocolatey 官方安装文档 Set-ExecutionPolicy Bypass -Scope Process -Force; [System.Net.ServicePointManager]::SecurityProtocol [System.Net.ServicePointManage…...
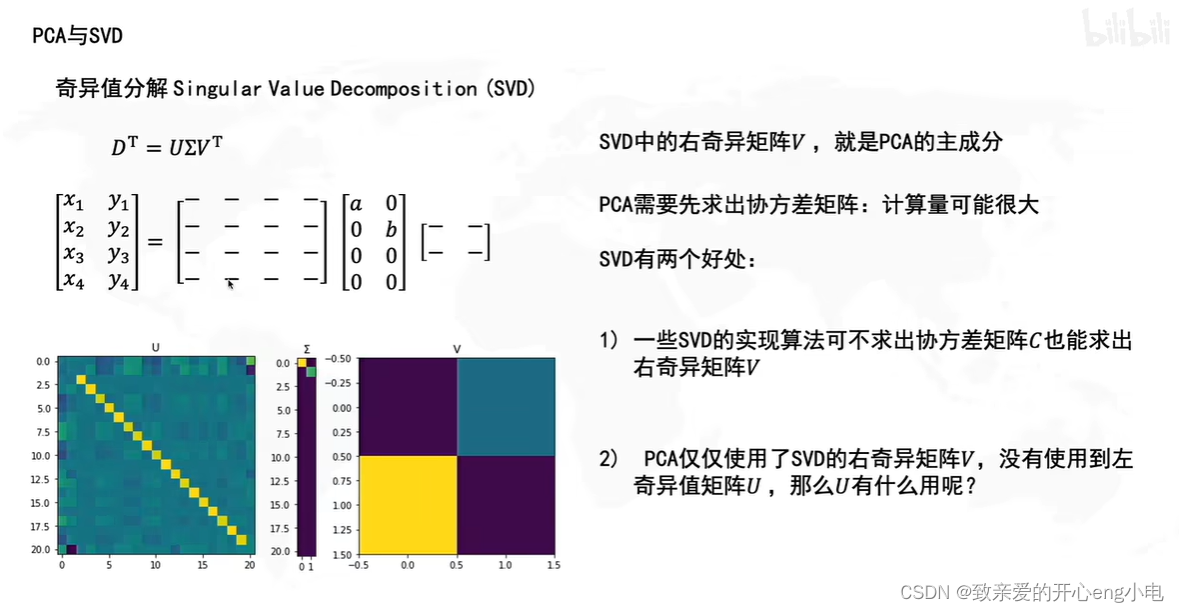
【线性代数】SVDPCA
用最直观的方式告诉你:什么是主成分分析PCA_哔哩哔哩_bilibili 奇异值分解singular value decomposition,SVD principal component analysis,PCA 降维操作 pca就是降维后使得信息损失最小 投影在坐标轴上的点越分散,信息保留越多 pca的实现…...

1.Vue2使用ElementUI-初识及环境搭建
目录 1.下载nodejs v16.x 2.设置淘宝镜像源 3.安装脚手架 4.创建一个项目 5.项目修改 代码地址:source-code: 源码笔记 1.下载nodejs v16.x 下载地址:Node.js — Download Node.js 2.设置淘宝镜像源 npm config set registry https://registry.…...
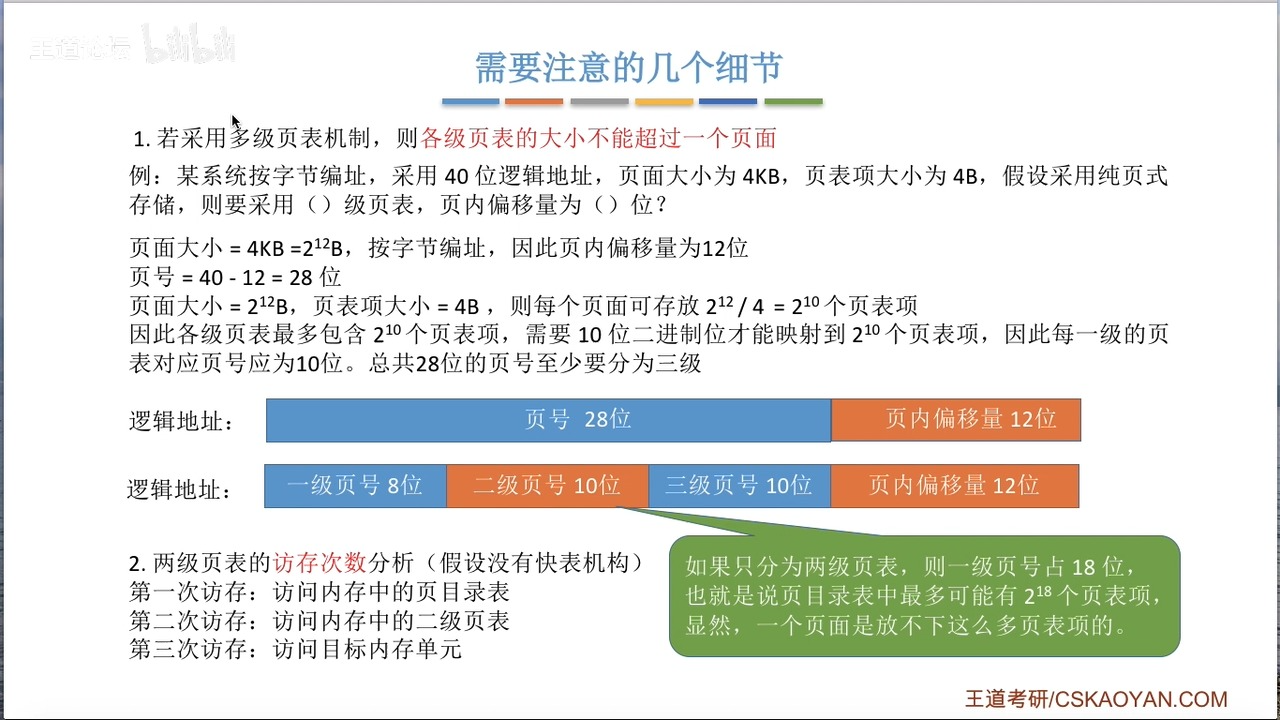
OS复习笔记ch7-3
承接上文我们讲完了页式管理和段式管理,接下来让我们深入讲解一下快表和二级页表 快表 快表和计算机组成原理讲的Cache原理如出一辙。为了减少访存的次数,OS在访问页面的时候创建了快表(Translation Lookaside Buffer ,简称TLB&…...
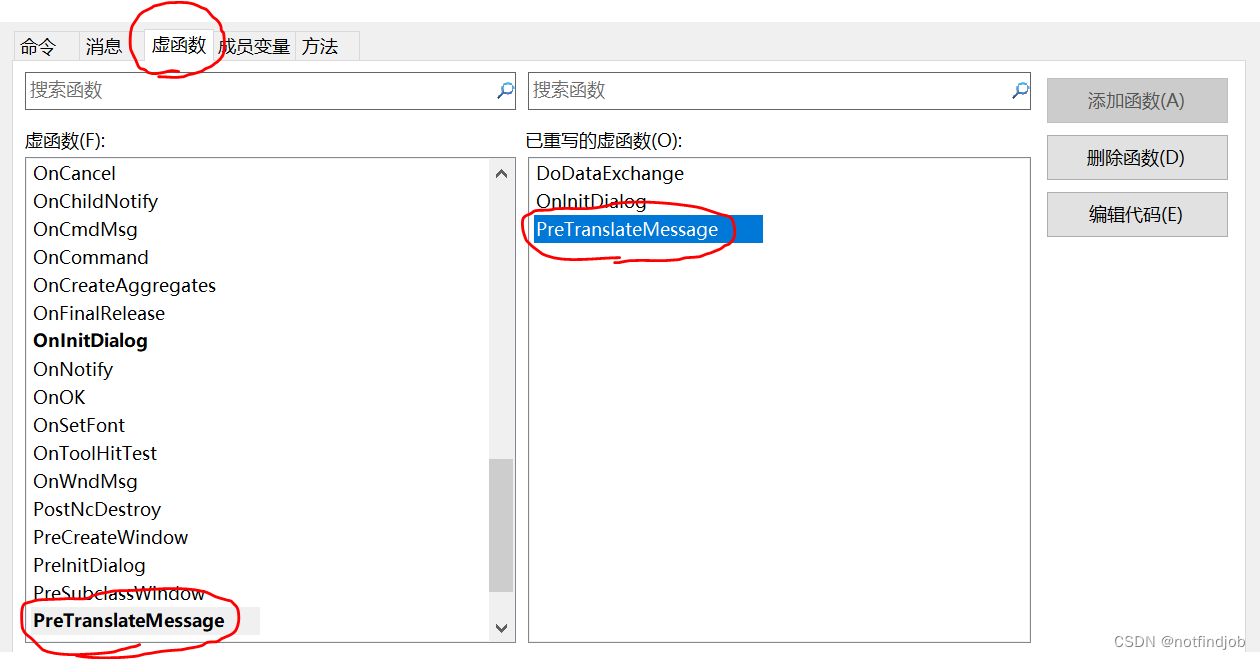
MFC 教程-回车时窗口退出问题
【问题描述】 MFC窗口默认时,按回车窗口会退出 【原因分析】 默认调用OnOK() 【解决办法】 重写虚函PreTranslateMessage BOOL CTESTMFCDlg::PreTranslateMessage(MSG* pMsg) {// TODO: 在此添加专用代码和/或调用基类// 修改回车键的操作反应 if (pMsg->…...
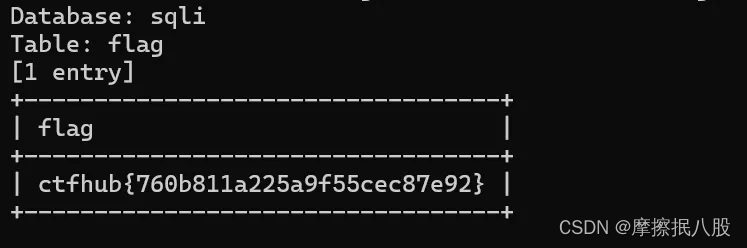
CTFHUB-SQL注入-字符型注入
目录 查询数据库名 查询数据库中的表名 查询表中数据 总结 此题目和上一题相似,一个是整数型注入,一个是字符型注入。字符型注入就是注入字符串参数,判断回显是否存在注入漏洞。因为上一题使用手工注入查看题目 flag ,这里就不…...

Docker配置Redis集群以及主从扩容与缩容
基础镜像拉取 docker run -p 6379:6379 -d redis:6.0.8 配置文件以及数据卷挂载 # 开启密码验证(可选) requirepass 1234 # 允许redis外地连接,需要注释掉绑定的IP # bind 127.0.0.1 # 关闭保护模式(可选) protected-m…...

【计算机网络】 传输层
一、传输层提供的服务 1.1 传输层的功能 1.1.1 传输层的功能如下: 传输层提供应用进程之间的逻辑通信(即端到端的通信)。与网络层的区别是:网络层提供的是主机之间的逻辑通信。 1.1.2 复用和分用 传输层要还要对收到的报文进行…...

山东大学软件学院项目实训-创新实训-基于大模型的旅游平台(二十七)- 微服务(7)
11.1 : 同步调用的问题 11.2 异步通讯的优缺点 11.3 MQ MQ就是事件驱动架构中的Broker 安装MQ docker run \-e RABBITMQ_DEFAULT_USERxxxx \-e RABBITMQ_DEFAULT_PASSxxxxx \--name mq \--hostname mq1 \-p 15672:15672 \-p 5672:5672 \-d \rabbitmq:3-management 浏览器访问1…...

Java Web应用,IPv6问题解决
在Java Web程序中,如果使用Tomcat并遇到了IPv6相关的问题,可以通过以下几种方式来解决: 1. 配置Tomcat以使用IPv4 默认情况下,Java可能会优先使用IPv6。如果你希望Tomcat使用IPv4,最简单的方法是通过设置系统属性来强…...
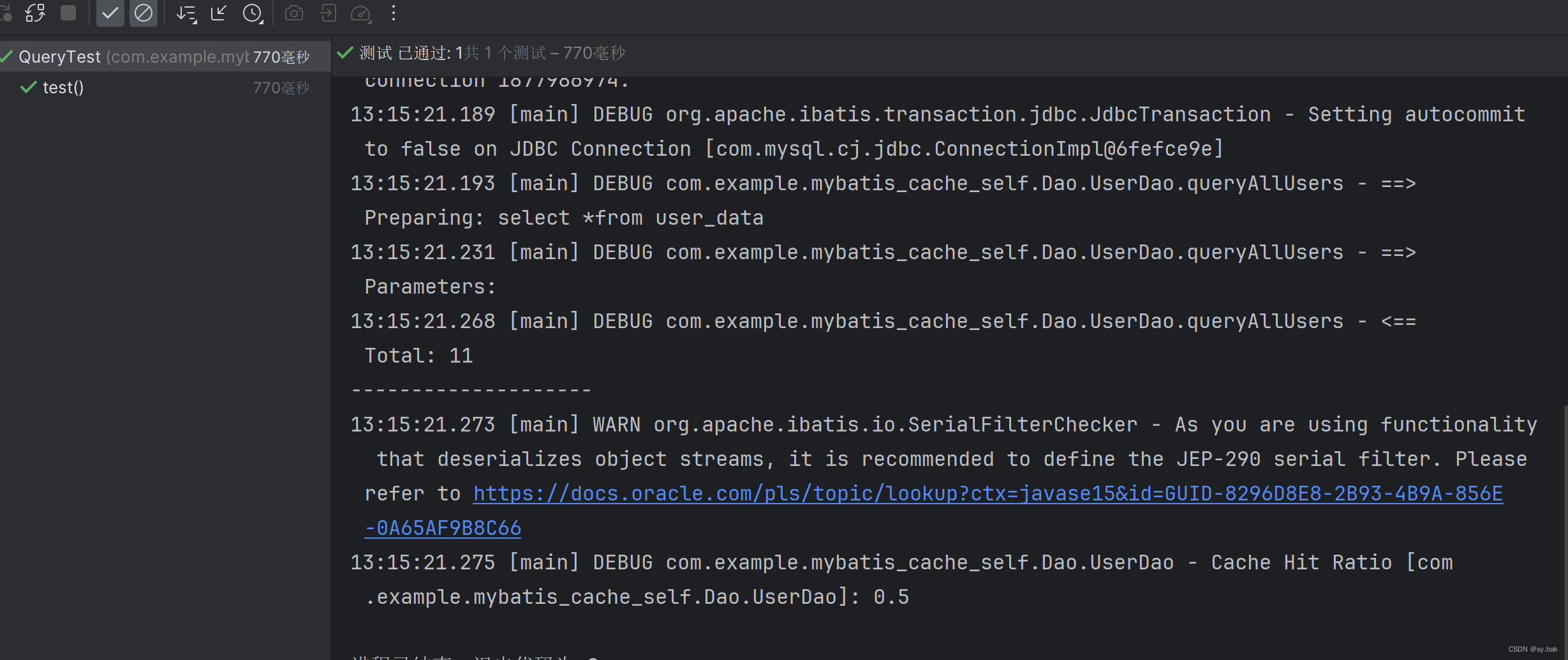
MyBatis二级缓存开启条件
MyBatis缓存为俩层体系。分为一级缓存和二级缓存。 一级缓存: 一级缓存默认开启,一级缓存的作用域是SqlSession级别的,这意味着当你更换SqlSession之后就不能再利用原来的SqlSession的一级缓存了。不同的SqlSession之间的一级缓存是隔离的。…...

golang 不用sleep如何实现实现每隔指定时间执行一次for循环?
今天介绍的是在go语言里面不用time.Sleep, 使用for range 定时器管道 来实现按照我们指定的时间间隔来执行for循环, 即: for range ticker.C { } 这样就实现了for每隔指定时间执行一次,除非管道被关闭,否则for而且会一直柱塞当前线…...
【el-tooltips改造】Vue实现文本溢出才显示el-tooltip,否则不显示el-tooltips
实现原理: 使用disabled属性控制el-tooltip的content显示与隐藏; 目标: 1行省略、多行省略、可缩放页面内的文本省略都有效。 实现方式: 1、自定义全局指令,tooltipAutoShow.js代码如下(参考的el-table中的…...
【Python数据类型的奥秘】:构建程序基石,驾驭信息之海
文章目录 🚀Python数据类型🌈1. 基本概念⭐2. 转化👊3. 数值运算💥4. 数值运算扩展(math库常用函数) 🚀Python数据类型 🌈1. 基本概念 整数(int):整数是没有小数部分的数…...

KubeSphere 容器平台高可用:环境搭建与可视化操作指南
Linux_k8s篇 欢迎来到Linux的世界,看笔记好好学多敲多打,每个人都是大神! 题目:KubeSphere 容器平台高可用:环境搭建与可视化操作指南 版本号: 1.0,0 作者: 老王要学习 日期: 2025.06.05 适用环境: Ubuntu22 文档说…...

XML Group端口详解
在XML数据映射过程中,经常需要对数据进行分组聚合操作。例如,当处理包含多个物料明细的XML文件时,可能需要将相同物料号的明细归为一组,或对相同物料号的数量进行求和计算。传统实现方式通常需要编写脚本代码,增加了开…...

(LeetCode 每日一题) 3442. 奇偶频次间的最大差值 I (哈希、字符串)
题目:3442. 奇偶频次间的最大差值 I 思路 :哈希,时间复杂度0(n)。 用哈希表来记录每个字符串中字符的分布情况,哈希表这里用数组即可实现。 C版本: class Solution { public:int maxDifference(string s) {int a[26]…...

工业安全零事故的智能守护者:一体化AI智能安防平台
前言: 通过AI视觉技术,为船厂提供全面的安全监控解决方案,涵盖交通违规检测、起重机轨道安全、非法入侵检测、盗窃防范、安全规范执行监控等多个方面,能够实现对应负责人反馈机制,并最终实现数据的统计报表。提升船厂…...

.Net框架,除了EF还有很多很多......
文章目录 1. 引言2. Dapper2.1 概述与设计原理2.2 核心功能与代码示例基本查询多映射查询存储过程调用 2.3 性能优化原理2.4 适用场景 3. NHibernate3.1 概述与架构设计3.2 映射配置示例Fluent映射XML映射 3.3 查询示例HQL查询Criteria APILINQ提供程序 3.4 高级特性3.5 适用场…...

Ascend NPU上适配Step-Audio模型
1 概述 1.1 简述 Step-Audio 是业界首个集语音理解与生成控制一体化的产品级开源实时语音对话系统,支持多语言对话(如 中文,英文,日语),语音情感(如 开心,悲伤)&#x…...
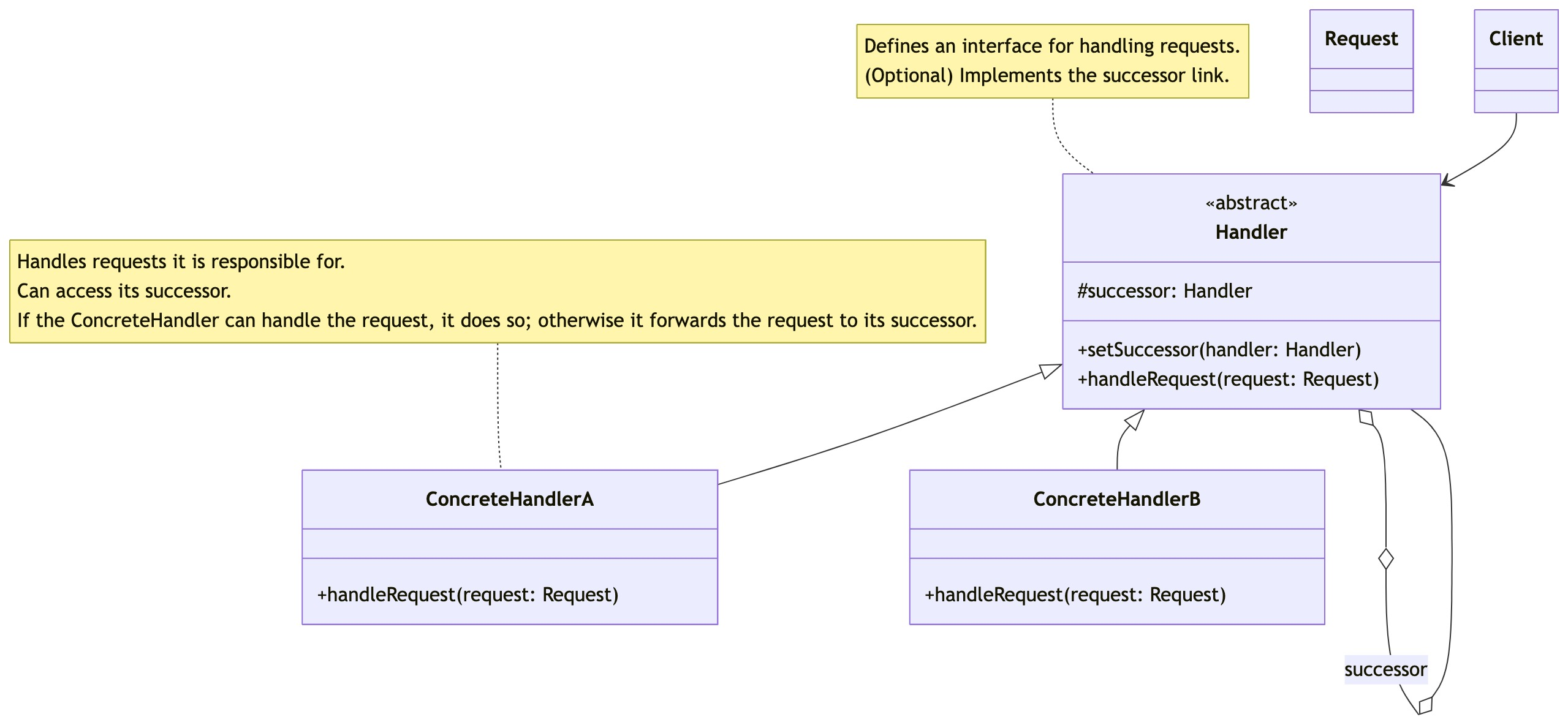
零基础设计模式——行为型模式 - 责任链模式
第四部分:行为型模式 - 责任链模式 (Chain of Responsibility Pattern) 欢迎来到行为型模式的学习!行为型模式关注对象之间的职责分配、算法封装和对象间的交互。我们将学习的第一个行为型模式是责任链模式。 核心思想:使多个对象都有机会处…...

关于 WASM:1. WASM 基础原理
一、WASM 简介 1.1 WebAssembly 是什么? WebAssembly(WASM) 是一种能在现代浏览器中高效运行的二进制指令格式,它不是传统的编程语言,而是一种 低级字节码格式,可由高级语言(如 C、C、Rust&am…...

Android Bitmap治理全解析:从加载优化到泄漏防控的全生命周期管理
引言 Bitmap(位图)是Android应用内存占用的“头号杀手”。一张1080P(1920x1080)的图片以ARGB_8888格式加载时,内存占用高达8MB(192010804字节)。据统计,超过60%的应用OOM崩溃与Bitm…...
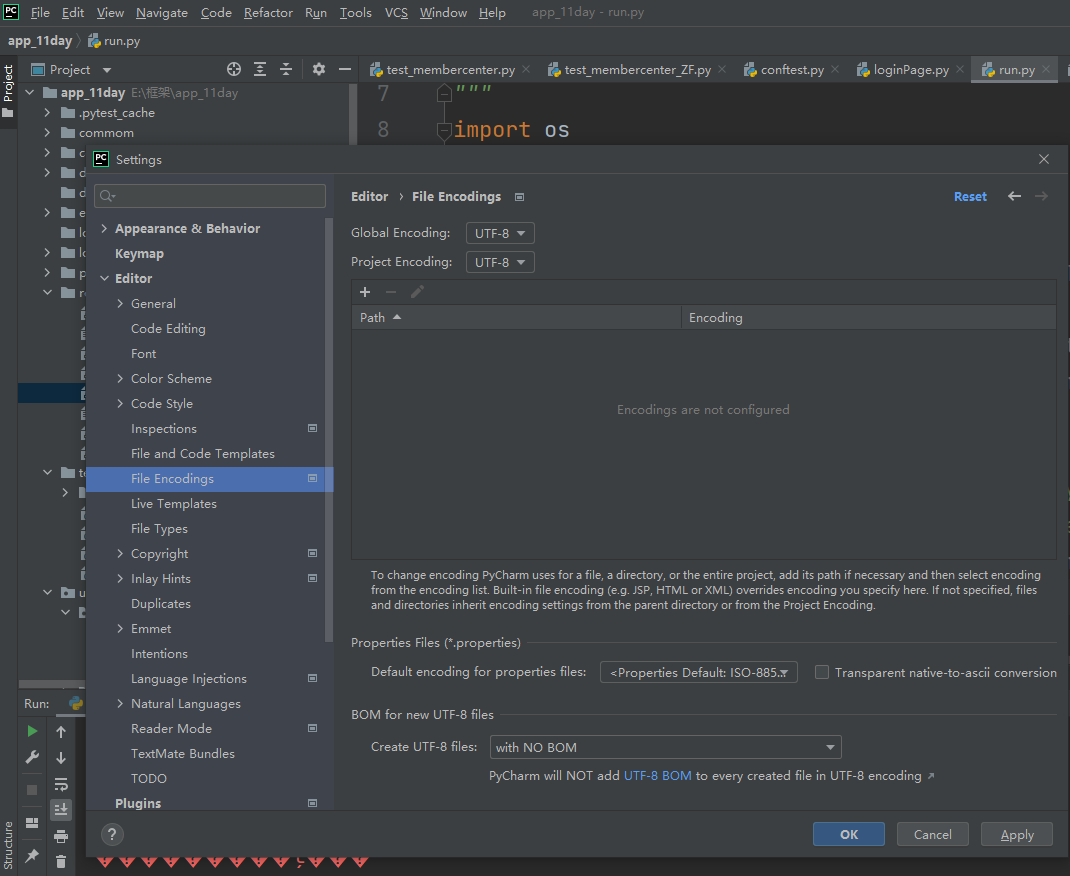
python执行测试用例,allure报乱码且未成功生成报告
allure执行测试用例时显示乱码:‘allure’ �����ڲ����ⲿ���Ҳ���ǿ�&am…...