MEMS:Lecture 17 Noise MDS
讲义
Minimum Detectable Signal (MDS)
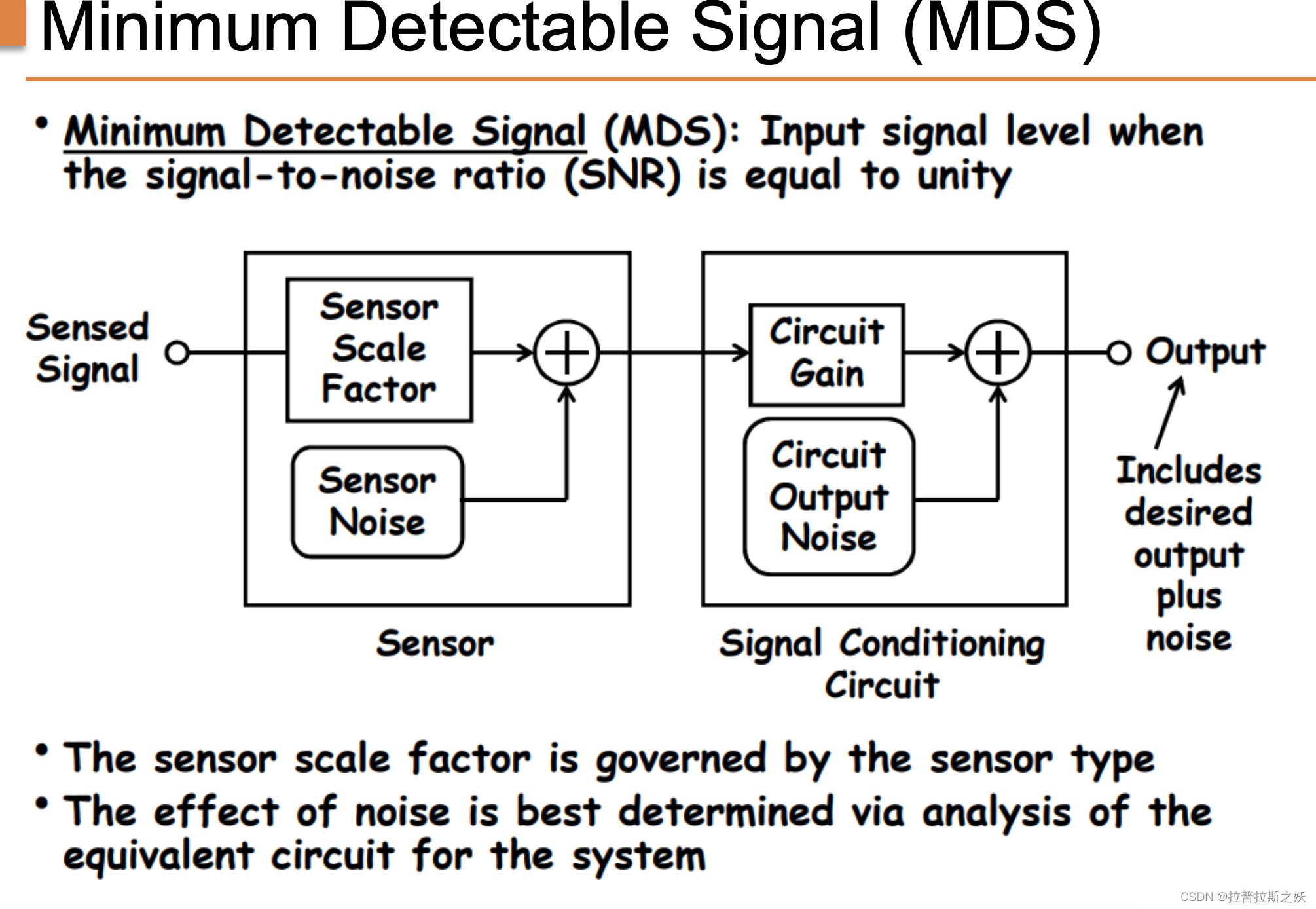
Minimum Detectable Signal(最小可检测信号)是指当信号-噪声比(Signal-to-Noise Ratio, SNR)等于1时的输入信号水平。简单来说,MDS 是一个系统能够分辨出信号存在的最低输入信号强度。
幻灯片展示了一个典型的传感器系统信号处理流程图,其中包含了以下几个关键部分:
-
传感器(Sensor):
- 传感器缩放因子(Sensor Scale Factor):这是传感器将物理现象转换为电信号时的转换比例。
- 传感器噪声(Sensor Noise):这是传感器本身所产生的噪声。这种噪声可以来源于各种物理现象,如热噪声、机械振动等。
-
信号调理电路(Signal Conditioning Circuit):
- 电路增益(Circuit Gain):这是信号调理电路对传感器信号进行放大的部分。增益的作用是将微弱的传感器信号放大到适合后续处理的电平。
- 电路输出噪声(Circuit Output Noise):这是信号调理电路自身产生的噪声。这些噪声会叠加到放大后的信号上。
-
输出(Output):输出信号包含了期望的信号以及各种噪声的叠加。
关键点
- 传感器缩放因子由传感器类型决定。
- 噪声的影响通过对系统的等效电路分析来确定。
将噪声源移动到共同点
为了简化噪声分析,我们可以将所有噪声源(传感器噪声和电路噪声)移到一个共同点进行分析,这个共同点通常是放大电路的输入端(即传感元件的输出端)。
- 通过将所有噪声源移到放大器输入端,可以直接比较检测信号与此节点处的噪声,从而得到MDS。
- 这样处理使得噪声分析更加简化和直观,有助于更好地理解系统噪声的贡献和MDS的计算。
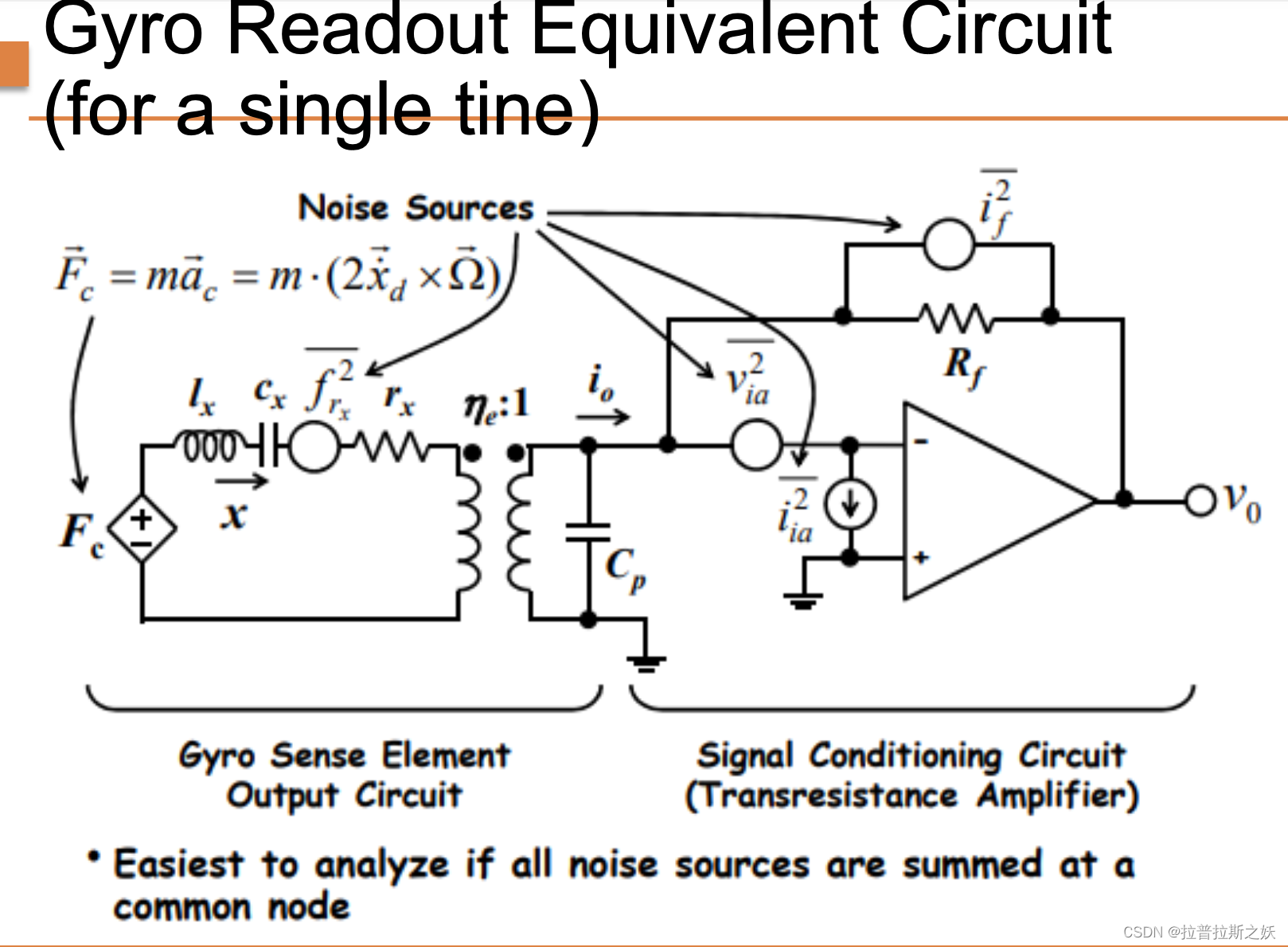
等效噪声源引入 Gyro Readout Equivalent Circuit (for a single tine)
通过将所有实际噪声源替换为等效输入噪声源,简化了噪声分析。这些等效噪声源反映了整个系统的总噪声影响,而无需单独分析每个噪声源。
未引入等效噪音源时:
该图分为两个主要部分:陀螺传感元件输出电路和信号调理电路(跨阻放大器)。
-
陀螺传感元件输出电路(Gyro Sense Element Output Circuit):
- F ⃗ c = m a ⃗ c = m ⋅ ( 2 x ˙ ⃗ d × Ω ⃗ ) \vec{F}_c = m \vec{a}_c = m \cdot (2\vec{\dot{x}}_d \times \vec{\Omega}) Fc=mac=m⋅(2x˙d×Ω):这个公式表示感知到的科里奥利力,反映了陀螺仪如何通过质量 m m m 和角速度 Ω ⃗ \vec{\Omega} Ω 来感知线速度 x ˙ ⃗ d \vec{\dot{x}}_d x˙d。
- 电路元件:图中包含电感 L x L_x Lx、电容 C x C_x Cx、电阻 R x R_x Rx 以及与之串联的元件,模拟传感元件的机械特性。
- 噪声源:标识了传感元件噪声 v i a 2 ‾ \overline{v_{ia}^2} via2 和电流噪声 i i a 2 ‾ \overline{i_{ia}^2} iia2,这些噪声会影响信号的精确度。
- η : 1 \eta:1 η:1:这个标记表示变压器的变压比,将初级线圈的电流转换到次级线圈,方便后续的信号处理。
-
信号调理电路(Signal Conditioning Circuit):
- 跨阻放大器(Transresistance Amplifier):利用反馈电阻 R f R_f Rf 将输入电流 i o i_o io 转换为输出电压 V 0 V_0 V0。
- 噪声源:电路中还标识了反馈电阻噪声 i f 2 ‾ \overline{i_{f}^2} if2 和运算放大器输入噪声 v i a 2 ‾ \overline{v_{ia}^2} via2。
- 输出电压 V 0 V_0 V0:这是经过信号放大和调理后的最终输出,包含了所有噪声源的影响。
关键点
- 该电路图显示了如何将机械信号通过传感元件转换为电信号,并通过跨阻放大器进行放大和调理。
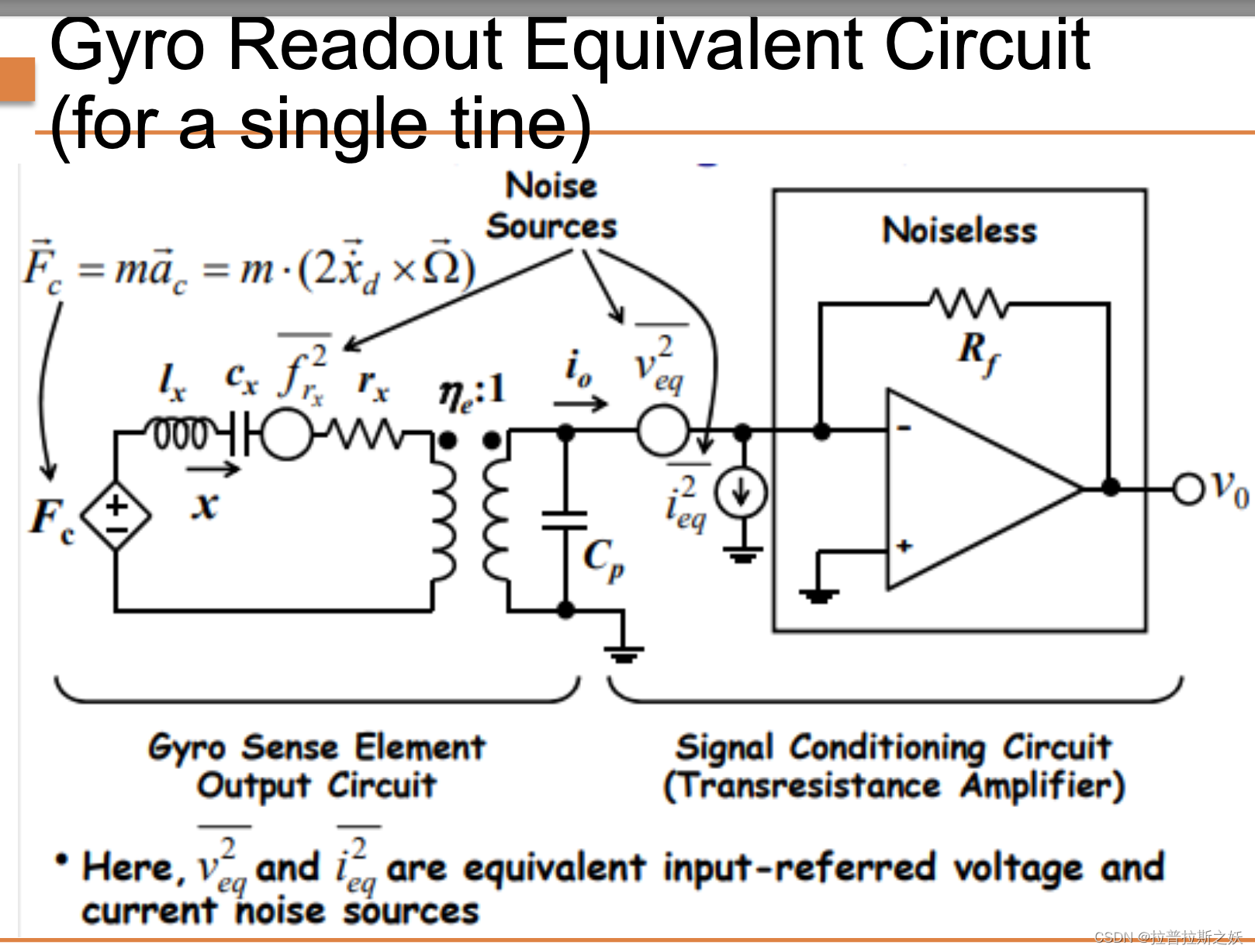
这页幻灯片是前一页等效电路图的扩展,通过引入等效输入噪声源,进一步简化了噪声分析过程。
引入等效噪音源后:
-
陀螺传感元件输出电路(Gyro Sense Element Output Circuit):
- 这部分与前一页类似,包含了表示科里奥利力的公式以及各种电路元件。
- 唯一的不同是增加了等效电压噪声源 v e q 2 ‾ \overline{v_{eq}^2} veq2 和等效电流噪声源 i e q 2 ‾ \overline{i_{eq}^2} ieq2。
-
信号调理电路(Signal Conditioning Circuit):
- 仍然是跨阻放大器,但这次假设它是无噪声的(即没有额外噪声源)。
- 增加了等效输入噪声源,分别是等效输入电压噪声 v e q 2 ‾ \overline{v_{eq}^2} veq2 和等效输入电流噪声 i e q 2 ‾ \overline{i_{eq}^2} ieq2。
2. Noise
2.1 功率谱密度(Power Spectral Density, PSD)

噪声的定义
噪声(Noise)被定义为给定参数 I ( t ) I(t) I(t) 的随机波动。这个参数 I ( t ) I(t) I(t) 可能代表电流、电压或其他电气量。在图中,平均值 I D I_D ID 代表该参数的直流分量,而随机波动部分则为噪声成分。
噪声特性
- 零平均值:噪声波形的平均值为零,这意味着在长期内,噪声的正负波动会相互抵消。
- 瞬时噪声处理困难:我们无法在瞬时处理噪声,因为它是随机且不可预测的。
平均处理噪声
为了处理噪声的平均效应,我们可以使用功率谱密度(Power Spectral Density, PSD)来表示噪声。这样做可以将噪声的随机特性转换为一个可以分析的频率域表示。
通过均方值表示噪声
我们使用噪声的均方值来表示噪声强度。定义 i ( t ) = I ( t ) − I D i(t) = I(t) - I_D i(t)=I(t)−ID,则均方值 i 2 ‾ \overline{i^2} i2 表示为:
i 2 ‾ = ( I − I D ) 2 ‾ = lim T → ∞ 1 T ∫ 0 T ∣ I − I D ∣ 2 d t \overline{i^2} = \overline{(I - I_D)^2} = \lim_{T \to \infty} \frac{1}{T} \int_0^T |I - I_D|^2 \, dt i2=(I−ID)2=T→∞limT1∫0T∣I−ID∣2dt
这个公式说明了在长时间内,噪声的平均平方值是如何计算的。
噪声谱密度
我们可以绘制噪声的谱密度来表示其均方值。噪声谱密度 i 2 ‾ Δ f \frac{\overline{i^2}}{\Delta f} Δfi2 的单位是 units 2 / Hz \text{units}^2/\text{Hz} units2/Hz,表示在单位频率内的噪声功率。
单边谱密度与双边谱密度
- 单边谱密度(One-sided spectral density):在电路设计中常用,并且通过频谱分析仪测量。它表示从0到 f max f_{\max} fmax 的频率范围内的噪声功率。
- 双边谱密度(Two-sided spectral density):通常在系统课程中使用,它是单边谱密度的一半,表示从 − f max -f_{\max} −fmax 到 f max f_{\max} fmax 的频率范围内的噪声功率。
积分均方噪声密度
积分均方噪声密度 i 2 ‾ \overline{i^2} i2 是噪声谱密度在所有频率上的积分,表示整个频率范围内的噪声功率总和。图中显示了一个典型的噪声谱密度曲线及其积分区域。
关键点总结
- 噪声是随机波动的表现,其平均值为零,难以在瞬时进行处理。
- 通过使用均方值和噪声谱密度,我们可以在频域内分析和处理噪声。
- 单边谱密度和双边谱密度是分析噪声时常用的两种表示方法,分别适用于不同的应用场景。
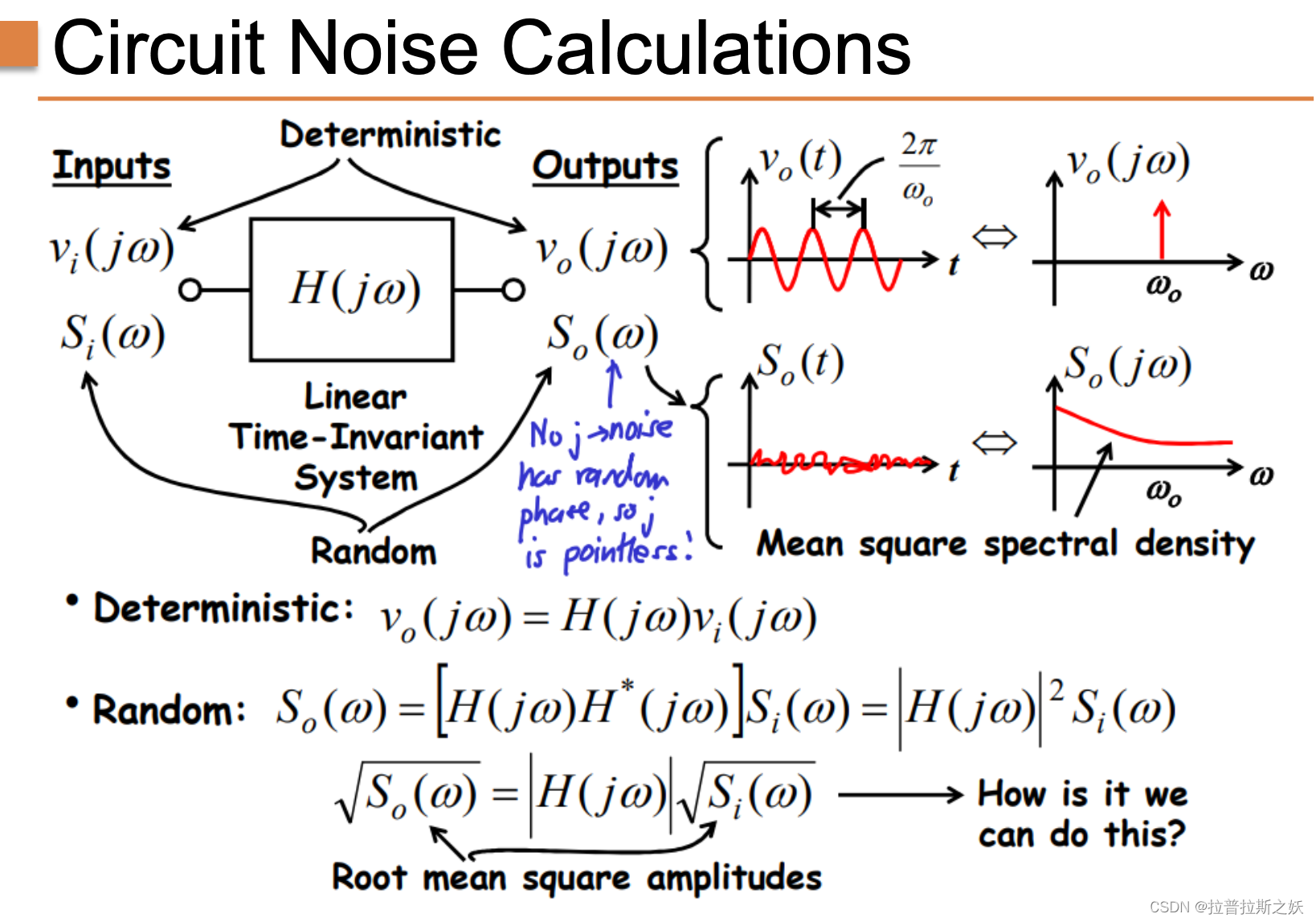
2.2 Circuit Noise Calculations
这张幻灯片详细介绍了如何通过LTI系统进行电路噪声计算,展示了确定性信号和随机信号在系统中的传递关系,并给出了关键公式。
图解
线性时不变系统(LTI)
LTI系统可以将输入信号 v i ( j ω ) v_i(j\omega) vi(jω) 和噪声谱密度 S i ( ω ) S_i(\omega) Si(ω) 转换为输出信号 v o ( j ω ) v_o(j\omega) vo(jω) 和输出噪声谱密度 S o ( ω ) S_o(\omega) So(ω),通过系统的传递函数 H ( j ω ) H(j\omega) H(jω)。
确定性输入与输出
- 输入: v i ( j ω ) v_i(j\omega) vi(jω)
- 输出: v o ( j ω ) v_o(j\omega) vo(jω)
- 时间域:输出信号 v o ( t ) v_o(t) vo(t) 是一个确定性的信号,可以通过傅里叶变换转换为频率域 v o ( j ω ) v_o(j\omega) vo(jω)。
- 确定性系统关系: v o ( j ω ) = H ( j ω ) v i ( j ω ) v_o(j\omega) = H(j\omega)v_i(j\omega) vo(jω)=H(jω)vi(jω)
随机性输入与输出
- 输入: S i ( ω ) S_i(\omega) Si(ω)
- 输出: S o ( ω ) S_o(\omega) So(ω)
- 时间域:输出噪声 S o ( t ) S_o(t) So(t) 是随机信号的均方值,可以通过傅里叶变换转换为频率域 S o ( j ω ) S_o(j\omega) So(jω)。
- 随机系统关系: S o ( ω ) = ∣ H ( j ω ) ∣ 2 S i ( ω ) S_o(\omega) = |H(j\omega)|^2 S_i(\omega) So(ω)=∣H(jω)∣2Si(ω)
关键公式
-
确定性系统关系:
v o ( j ω ) = H ( j ω ) v i ( j ω ) v_o(j\omega) = H(j\omega)v_i(j\omega) vo(jω)=H(jω)vi(jω) -
随机系统关系:
S o ( ω ) = ∣ H ( j ω ) ∣ 2 S i ( ω ) S_o(\omega) = |H(j\omega)|^2 S_i(\omega) So(ω)=∣H(jω)∣2Si(ω)这个公式说明了输出噪声谱密度 S o ( ω ) S_o(\omega) So(ω) 是输入噪声谱密度 S i ( ω ) S_i(\omega) Si(ω) 经过系统传递函数 H ( j ω ) H(j\omega) H(jω) 的幅度平方放大后的结果。
-
均方根振幅:
S o ( ω ) = ∣ H ( j ω ) ∣ S i ( ω ) \sqrt{S_o(\omega)} = |H(j\omega)| \sqrt{S_i(\omega)} So(ω)=∣H(jω)∣Si(ω)这个公式解释了如何通过系统的传递函数 H ( j ω ) H(j\omega) H(jω) 对输入噪声的均方根振幅进行计算。
重要概念
- 传递函数 H ( j ω ) H(j\omega) H(jω):这是一个表示系统响应的函数,描述了输入与输出之间的关系。
- 噪声的随机相位:噪声具有随机相位,因此在计算时无需考虑相位,只需要考虑幅度。
- 均方根值的计算:通过计算均方根值,我们可以更直观地理解噪声在系统中的传递和放大情况。
2.3 Handling Noise Deterministically
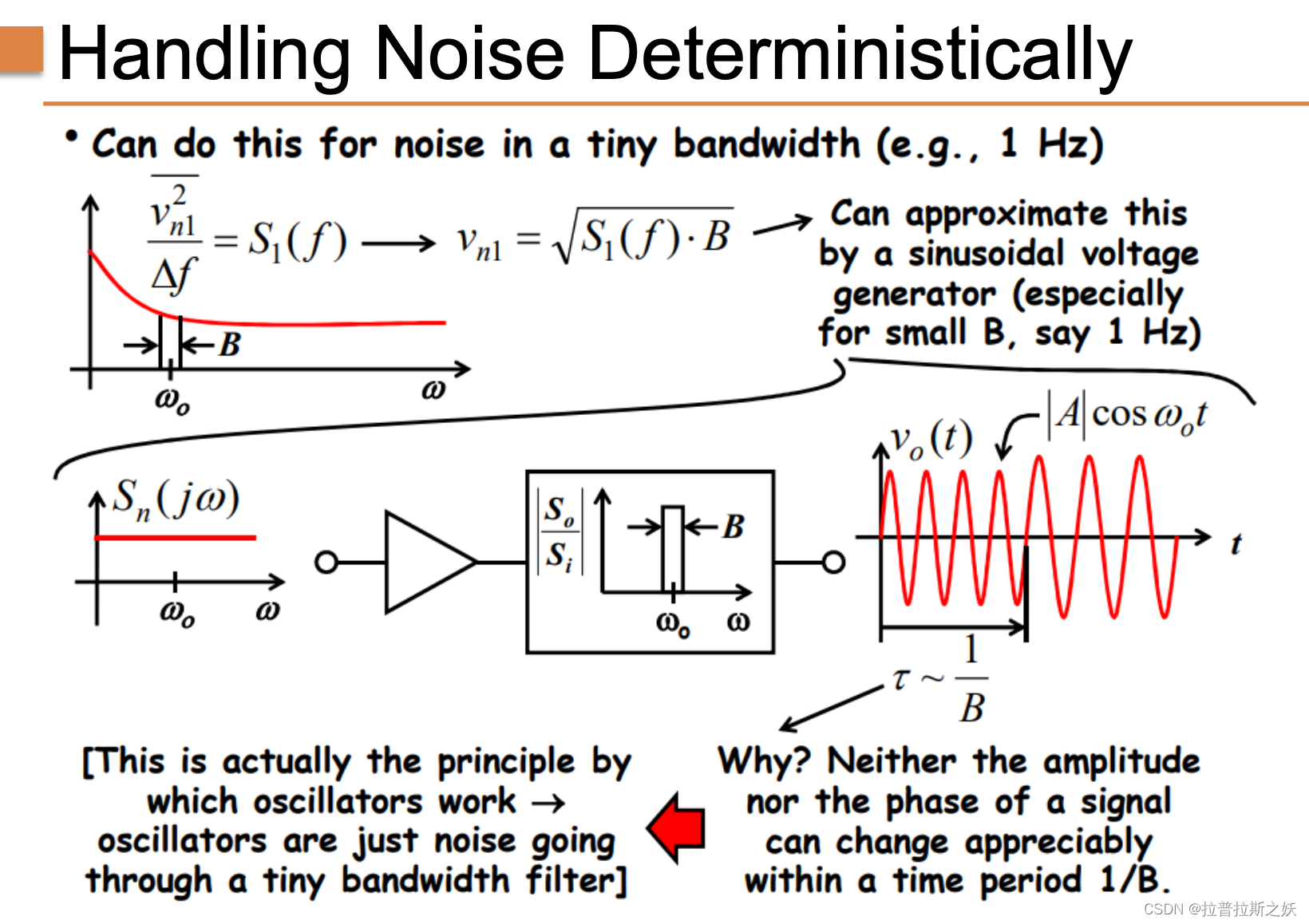
这张幻灯片详细介绍了如何在确定性情况下处理小带宽内的噪声,通过将频域噪声近似为时间域的正弦信号,简化了复杂的噪声分析过程。这种方法不仅提高了分析的直观性,还为振荡器等电路的设计提供了理论支持。
图解
频域表示
- 噪声谱密度 v n 1 2 ‾ Δ f = S 1 ( f ) \frac{\overline{v_{n1}^2}}{\Delta f} = S_1(f) Δfvn12=S1(f):
- 频率 ω o \omega_o ωo 附近的噪声谱密度 S 1 ( f ) S_1(f) S1(f) 可以通过带宽 B B B 进行积分。
- 在带宽 B B B 内的噪声电压 v n 1 v_{n1} vn1 可以表示为:
v n 1 = S 1 ( f ) ⋅ B v_{n1} = \sqrt{S_1(f) \cdot B} vn1=S1(f)⋅B
时间域近似
- 可以将这种频域的噪声电压近似为一个正弦电压源,特别是在带宽很小(如1 Hz)时。这种近似有效地简化了分析,使其类似于分析一个确定性的正弦信号。
信号调理
- 信号通过LTI系统:
- 噪声谱密度 S n ( j ω ) S_n(j\omega) Sn(jω) 经过线性时不变系统(LTI系统),其输出噪声谱密度 S o ( j ω ) S_o(j\omega) So(jω) 受系统传递函数的影响。
- 传递函数 S o S i \frac{S_o}{S_i} SiSo 在带宽 B B B 内可以看作一个常数。
输出信号
- 输出信号 v o ( t ) v_o(t) vo(t):
- 经过系统后,输出信号在时间域上表现为一个正弦波:
v o ( t ) = ∣ A ∣ cos ( ω o t ) v_o(t) = |A| \cos(\omega_o t) vo(t)=∣A∣cos(ωot) - 时间常数 τ \tau τ 与带宽 B B B 相关:
τ ≈ 1 B \tau \approx \frac{1}{B} τ≈B1
- 经过系统后,输出信号在时间域上表现为一个正弦波:
关键点
-
频域到时间域的近似:
- 通过频域噪声谱密度 S 1 ( f ) S_1(f) S1(f) 和带宽 B B B 的关系,我们可以将频域噪声近似为时间域的正弦电压源。
- 这种近似特别适用于带宽非常小的情况,使得复杂的随机噪声分析变得简单而直观。
-
LTI系统中的噪声传递:
- 在通过LTI系统时,输入噪声谱密度 S n ( j ω ) S_n(j\omega) Sn(jω) 经过系统传递函数的影响,得到输出噪声谱密度 S o ( j ω ) S_o(j\omega) So(jω)。
- 传递函数在小带宽内可以近似为常数,简化了计算。
-
时间常数与带宽的关系:
- 输出信号的时间常数 τ \tau τ 与带宽 B B B 成反比关系,即带宽越小,时间常数越大。
- 这一关系表明在小带宽内,信号的幅度和相位在一个时间周期内不会显著变化。
应用与原理
- 振荡器的工作原理:
- 这实际上也是振荡器工作的基本原理。振荡器是通过一个窄带滤波器,使噪声通过后形成稳定的振荡信号。
- 振荡器利用噪声在窄带内的确定性特征,生成具有稳定频率和相位的输出信号。
2.4 Systematic Noise Calculation Procedure
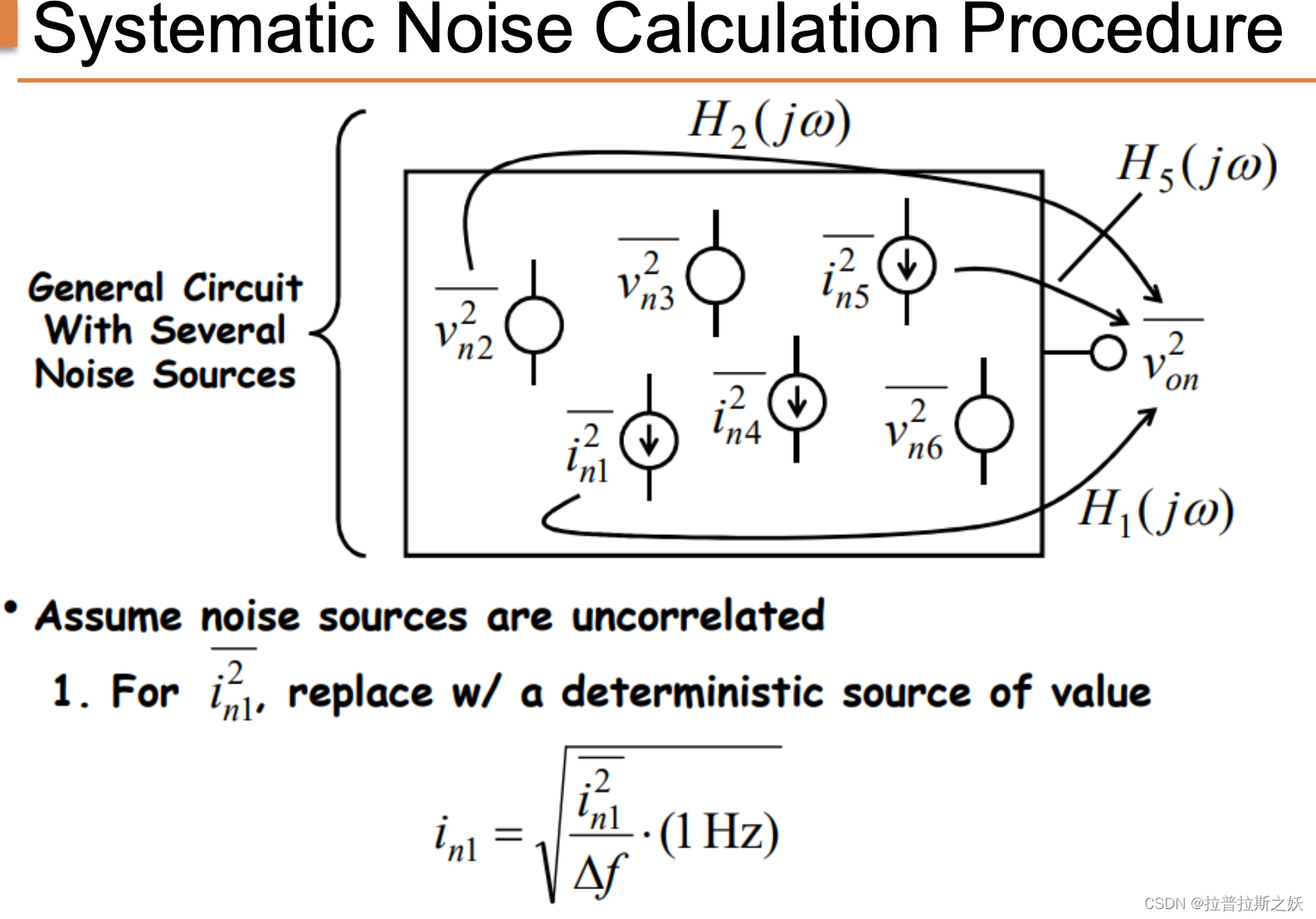
这两张幻灯片系统性地展示了如何计算电路中多个噪声源的总输出噪声,通过假设噪声源非相关、使用确定性替换以及传递函数分析的方法
图解
图示部分
-
General Circuit with Several Noise Sources:
- 该电路包含多个噪声源: v n 2 2 ‾ , v n 3 2 ‾ , i n 5 2 ‾ , i n 4 2 ‾ , v n 6 2 ‾ , i n 1 2 ‾ \overline{v_{n2}^2}, \overline{v_{n3}^2}, \overline{i_{n5}^2}, \overline{i_{n4}^2}, \overline{v_{n6}^2}, \overline{i_{n1}^2} vn22,vn32,in52,in42,vn62,in12。
- 噪声源通过系统的传递函数 H 1 ( j ω ) , H 2 ( j ω ) , H 5 ( j ω ) H_1(j\omega), H_2(j\omega), H_5(j\omega) H1(jω),H2(jω),H5(jω) 对总输出噪声 v o n 2 ‾ \overline{v_{on}^2} von2 产生影响。
-
Assume Noise Sources are Uncorrelated:
- 假设各噪声源之间是非相关的,这样可以简化计算过程。
步骤部分
-
为 i n 1 2 ‾ \overline{i_{n1}^2} in12 替换为确定性源:
- 将随机噪声电流源 i n 1 2 ‾ \overline{i_{n1}^2} in12 替换为一个确定性的电流源 i n 1 i_{n1} in1,其值为:
i n 1 = i n 1 2 ‾ Δ f ⋅ ( 1 Hz ) i_{n1} = \sqrt{\frac{\overline{i_{n1}^2}}{\Delta f} \cdot (1 \text{Hz})} in1=Δfin12⋅(1Hz)
- 将随机噪声电流源 i n 1 2 ‾ \overline{i_{n1}^2} in12 替换为一个确定性的电流源 i n 1 i_{n1} in1,其值为:
-
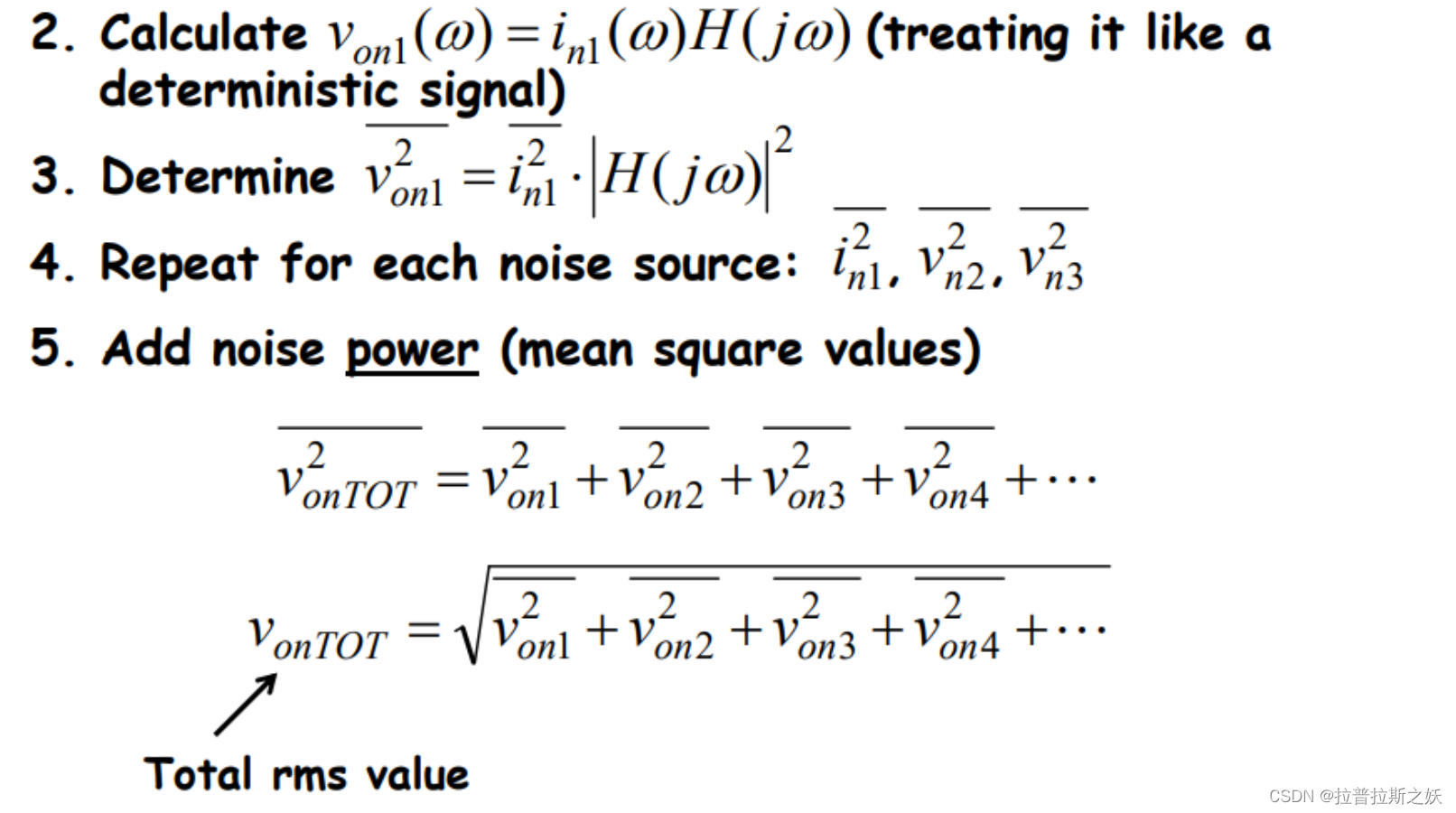
计算 v o n 1 ( ω ) = i n 1 ( ω ) H ( j ω ) v_{on1}(\omega) = i_{n1}(\omega) H(j\omega) von1(ω)=in1(ω)H(jω):
- 将 i n 1 ( ω ) i_{n1}(\omega) in1(ω) 视为确定性信号,通过系统传递函数 H ( j ω ) H(j\omega) H(jω) 计算输出噪声 v o n 1 ( ω ) v_{on1}(\omega) von1(ω)。
-
确定 v o n 1 2 ‾ \overline{v_{on1}^2} von12:
- 计算均方值:
v o n 1 2 ‾ = i n 1 2 ‾ ⋅ ∣ H ( j ω ) ∣ 2 \overline{v_{on1}^2} = \overline{i_{n1}^2} \cdot |H(j\omega)|^2 von12=in12⋅∣H(jω)∣2
- 计算均方值:
-
对每个噪声源重复上述步骤:
- 依次对 i n 1 2 ‾ , v n 2 2 ‾ , v n 3 2 ‾ , i n 4 2 ‾ , i n 5 2 ‾ , v n 6 2 ‾ \overline{i_{n1}^2}, \overline{v_{n2}^2}, \overline{v_{n3}^2}, \overline{i_{n4}^2}, \overline{i_{n5}^2}, \overline{v_{n6}^2} in12,vn22,vn32,in42,in52,vn62 重复步骤2和3,计算每个噪声源的输出噪声。
-
将噪声功率相加:
- 将所有噪声源的均方值相加,得到总输出噪声功率:
v o n T O T 2 ‾ = v o n 1 2 ‾ + v o n 2 2 ‾ + v o n 3 2 ‾ + v o n 4 2 ‾ + v o n 5 2 ‾ + v o n 6 2 ‾ + … \overline{v_{onTOT}^2} = \overline{v_{on1}^2} + \overline{v_{on2}^2} + \overline{v_{on3}^2} + \overline{v_{on4}^2} + \overline{v_{on5}^2} + \overline{v_{on6}^2} + \ldots vonTOT2=von12+von22+von32+von42+von52+von62+… - 最终的总均方根值(RMS):
v o n T O T = v o n 1 2 ‾ + v o n 2 2 ‾ + v o n 3 2 ‾ + v o n 4 2 ‾ + v o n 5 2 ‾ + v o n 6 2 ‾ + … v_{onTOT} = \sqrt{\overline{v_{on1}^2} + \overline{v_{on2}^2} + \overline{v_{on3}^2} + \overline{v_{on4}^2} + \overline{v_{on5}^2} + \overline{v_{on6}^2} + \ldots} vonTOT=von12+von22+von32+von42+von52+von62+…
- 将所有噪声源的均方值相加,得到总输出噪声功率:
关键点总结
- 非相关噪声源假设:各噪声源之间是非相关的,这使得可以独立处理每个噪声源的影响。
- 确定性替换:将随机噪声源替换为确定性信号源,以简化计算。
- 传递函数:使用系统的传递函数 H ( j ω ) H(j\omega) H(jω) 将输入噪声转换为输出噪声。
- 均方值相加:通过计算每个噪声源的均方值,并将它们相加,得到总输出噪声的均方值。
3. Noise sources
3.1 Thermal Noise
这两页幻灯片详细介绍了热噪声的概念、性质以及其在电子学和机械学中的表现形式,并提供了如何在电路中表示热噪声的具体方法。
热噪声的类型
电子学中的热噪声(Thermal Noise in Electronics)
- 定义:也称为约翰逊噪声(Johnson Noise)或奈奎斯特噪声(Nyquist Noise)。
- 产生原因:由于导电介质中自由电子的热激励随机运动所产生的噪声。
- 电子路径:由于碰撞的原因,电子的运动路径是随机定向的。
机械学中的热噪声(Thermal Noise in Mechanics)
- 定义:布朗运动噪声(Brownian Motion Noise)。
- 关联过程:与所有耗散过程相关,这些过程与热域耦合。
- 任何阻尼:任何阻尼都会产生热噪声,包括气体阻尼、内部损耗等。
热噪声的性质
- 白噪声:热噪声是白噪声,即频率恒定。
- 与温度成正比:噪声强度与温度成正比。
- 不与电流关联:热噪声与电流无关。
- 存在于任何真实的物理电阻器中:任何实际的物理电阻器都会产生热噪声。
热噪声的电路表示
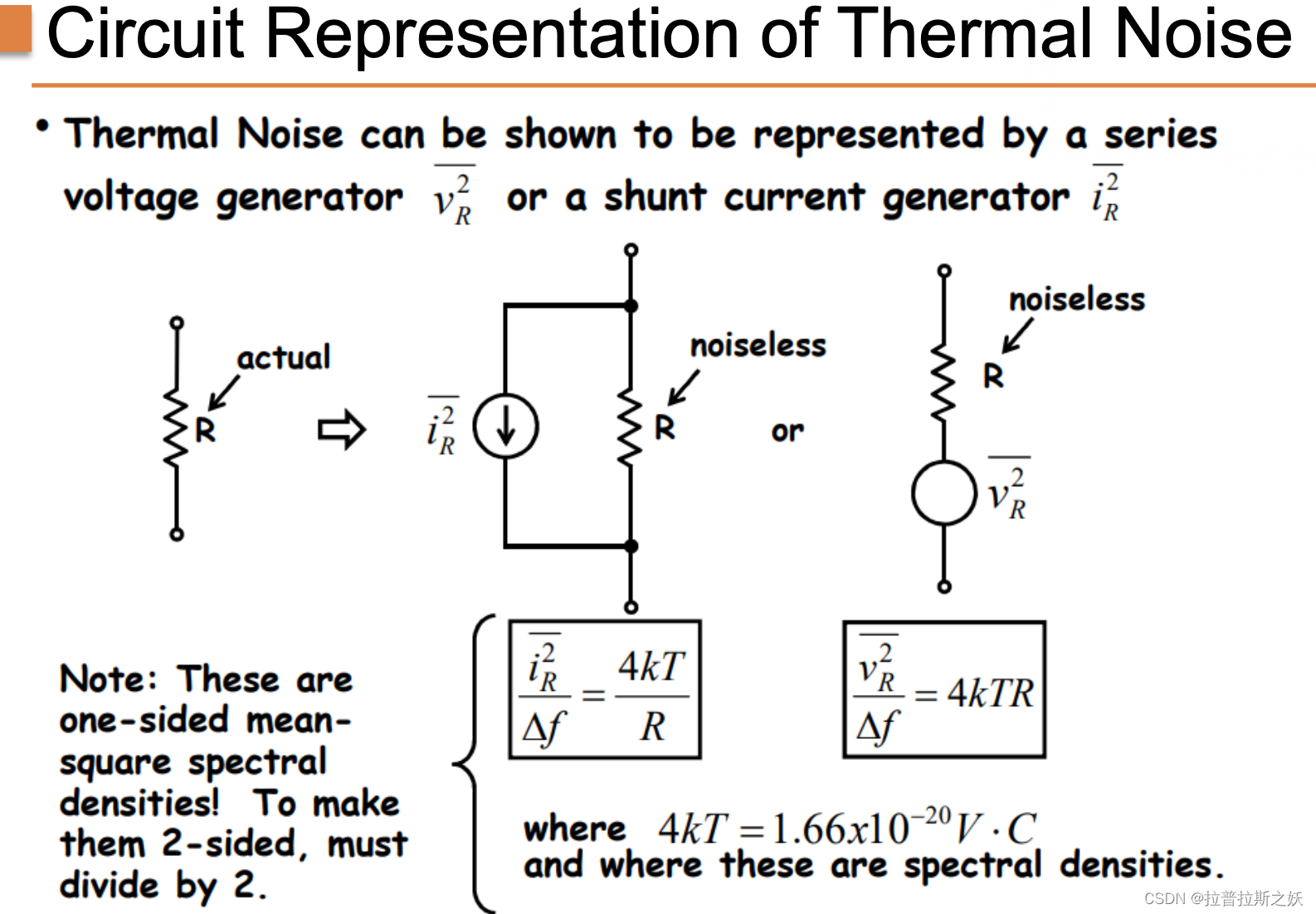
热噪声可以表示为一个串联电压源 v R 2 ‾ \overline{v_R^2} vR2 或一个并联电流源 i R 2 ‾ \overline{i_R^2} iR2。
电路图解释
- 实际电阻器:图中左侧显示了一个实际电阻器 R R R。
- 噪声表示:
- 串联电压源表示:一个无噪声电阻器 R R R 串联一个电压源 v R 2 ‾ \overline{v_R^2} vR2。
- 并联电流源表示:一个无噪声电阻器 R R R 并联一个电流源 i R 2 ‾ \overline{i_R^2} iR2。
关键公式
- 电流噪声谱密度:
i R 2 ‾ Δ f = 4 k T R \frac{\overline{i_R^2}}{\Delta f} = \frac{4kT}{R} ΔfiR2=R4kT - 电压噪声谱密度:
v R 2 ‾ Δ f = 4 k T R \frac{\overline{v_R^2}}{\Delta f} = 4kTR ΔfvR2=4kTR
其中 4 k T = 1.66 × 1 0 − 20 V ⋅ C 4kT = 1.66 \times 10^{-20} \text{V} \cdot \text{C} 4kT=1.66×10−20V⋅C 表示噪声谱密度常数。
关键点总结
- 单边谱密度:这些表示都是单边均方谱密度,要使其成为双边谱密度,必须除以2。
- 热噪声的电路表示:可以通过串联电压源或并联电流源来表示热噪声,这两种表示方式在实际电路设计和分析中都有重要的应用
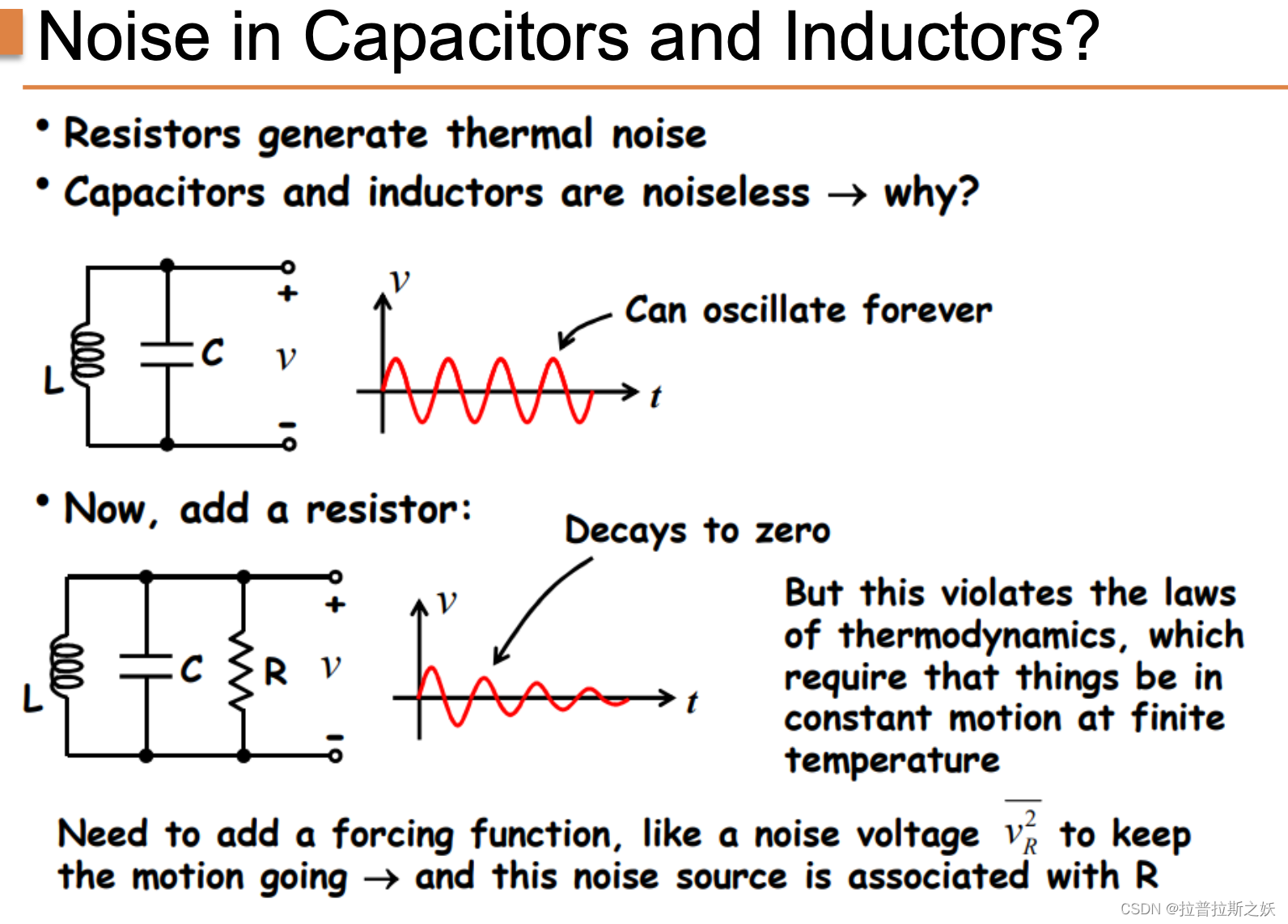
这张幻灯片通过比较理想LC电路和实际含有电阻的LC电路,说明了电容器和电感器本身不产生噪声,但电阻的存在会引入热噪声。这符合热力学定律,解释了在有限温度下,系统必须经历能量耗散的原因。
电阻、电容和电感的噪声特性
电阻产生热噪声
电阻器在电路中会产生热噪声(热噪声),这是因为自由电子的随机热运动导致的。该现象在前面的幻灯片中已经详细解释过。
电容器和电感器为何没有噪声
电容器和电感器通常被认为是无噪声的,这一点需要解释清楚。
-
无电阻时的LC电路:
- 图中显示了一个由电感 L L L 和电容 C C C 组成的LC电路,没有电阻的情况下,这个电路可以无限振荡。
- 振荡现象:电压 v v v 随时间 t t t 的变化显示了一个正弦波形,这意味着电路可以永远振荡下去,只要不考虑损耗。
- 物理解释:由于没有任何能量损耗,理想情况下,这种振荡可以持续无限时间。
-
加入电阻后的LC电路:
- 图中显示了在LC电路中加入一个电阻 R R R 的情况。
- 衰减现象:电压 v v v 随时间 t t t 的变化显示了一个逐渐衰减的正弦波形,这意味着振荡最终会因为能量损失而衰减到零。
- 物理解释:这符合热力学定律,因为在有限温度下,系统必须经历能量耗散。
强迫函数和噪声电压源
为了维持振荡,必须加入一个强迫函数,如噪声电压源 v R 2 ‾ \overline{v_R^2} vR2,这个噪声源与电阻 R R R 相关。
关键点总结
- 电容器和电感器的噪声:尽管理想情况下电容器和电感器本身不产生噪声,但在实际电路中,电阻的存在会引入噪声。
- 振荡与能量耗散:没有电阻的LC电路可以无限振荡,但在实际电路中,电阻的存在导致能量耗散,使振荡最终衰减。
- 热力学定律:在有限温度下,系统的能量必须耗散,这需要考虑噪声源的影响,特别是电阻产生的热噪声。
Why 4kTR?
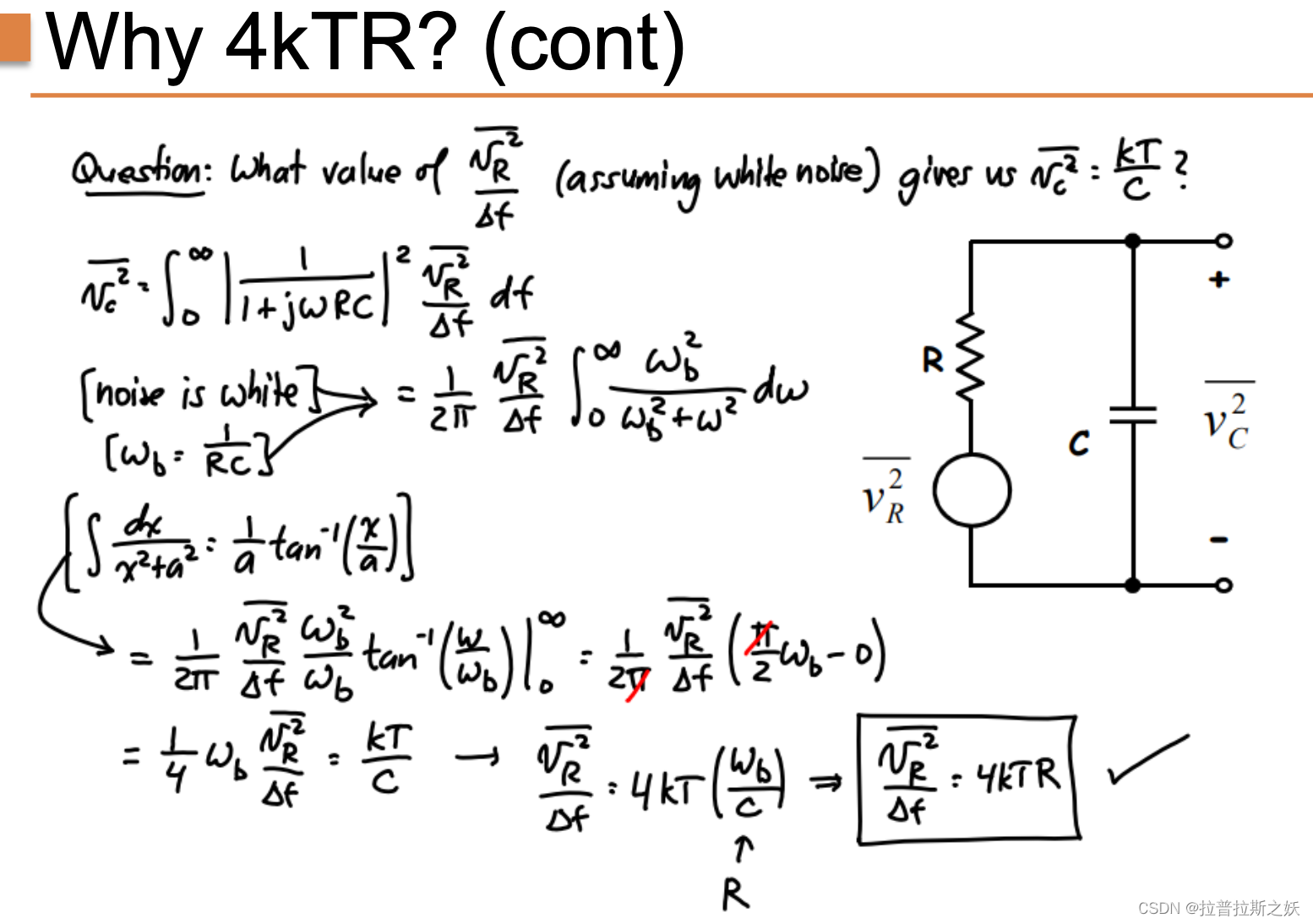
热噪声公式 v R 2 ‾ Δ f = 4 k T R \frac{\overline{v_R^2}}{\Delta f} = 4kTR ΔfvR2=4kTR 是一个关键的公式,用于描述电阻器中的热噪声电压谱密度。为了理解这个公式的来源,我们需要结合统计热力学和电路理论。下面我们逐步解析这个公式的推导过程。
统计热力学基础
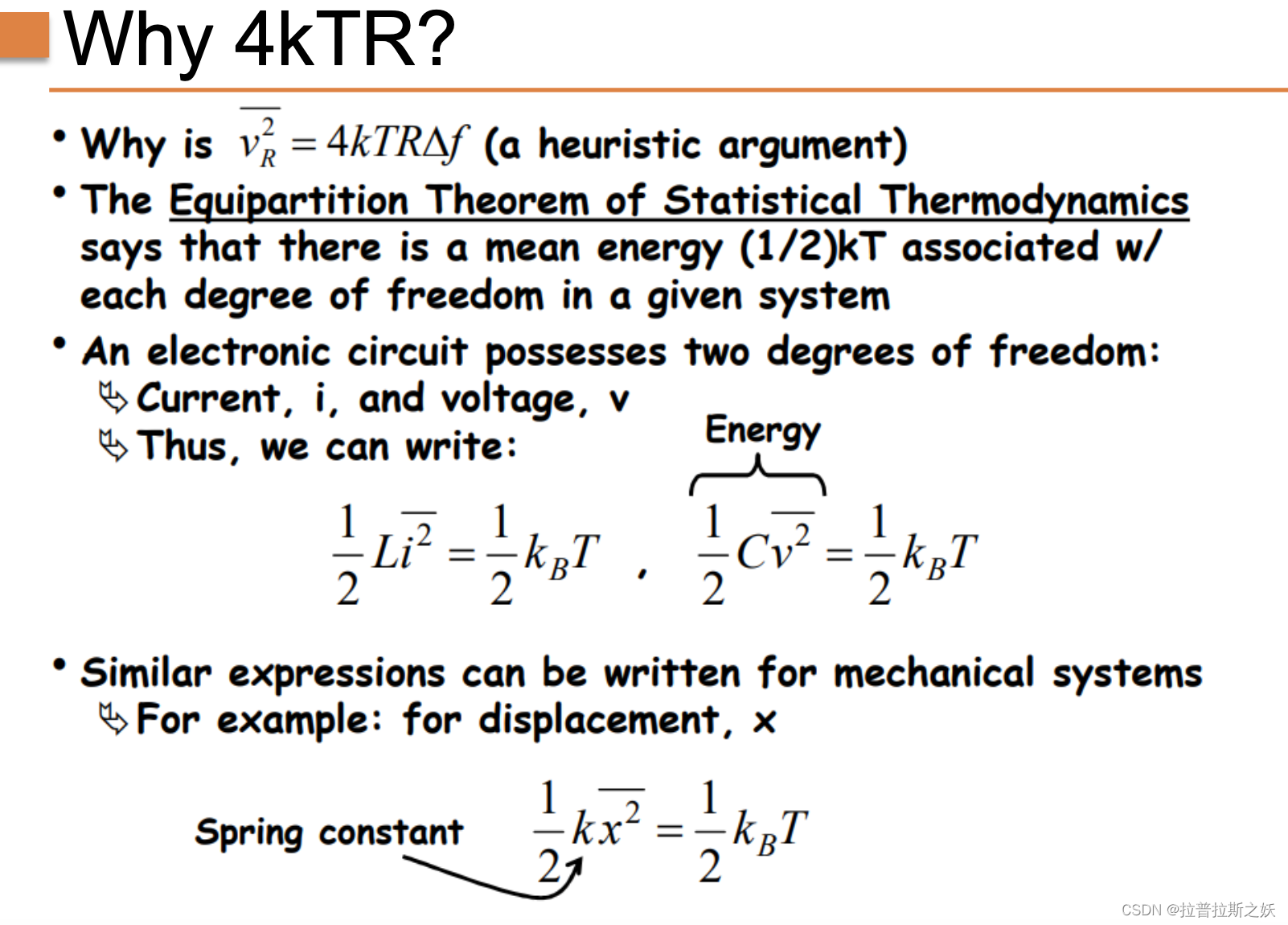
等分定理
等分定理(Equipartition Theorem)是统计热力学中的一个基本定理,它指出在热平衡状态下,每个自由度所具有的平均能量是 1 2 k B T \frac{1}{2}k_BT 21kBT,其中 k B k_B kB 是玻尔兹曼常数, T T T 是绝对温度。
自由度与能量
对于一个电子电路,存在两个自由度:电流 i i i 和电压 v v v。这些自由度对应的能量可以分别表示为:
-
电感 L L L 中的电流 i i i:
1 2 L i 2 ‾ = 1 2 k B T \frac{1}{2} L \overline{i^2} = \frac{1}{2} k_B T 21Li2=21kBT -
电容 C C C 中的电压 v v v:
1 2 C v 2 ‾ = 1 2 k B T \frac{1}{2} C \overline{v^2} = \frac{1}{2} k_B T 21Cv2=21kBT
具体推导过程
RC 电路分析
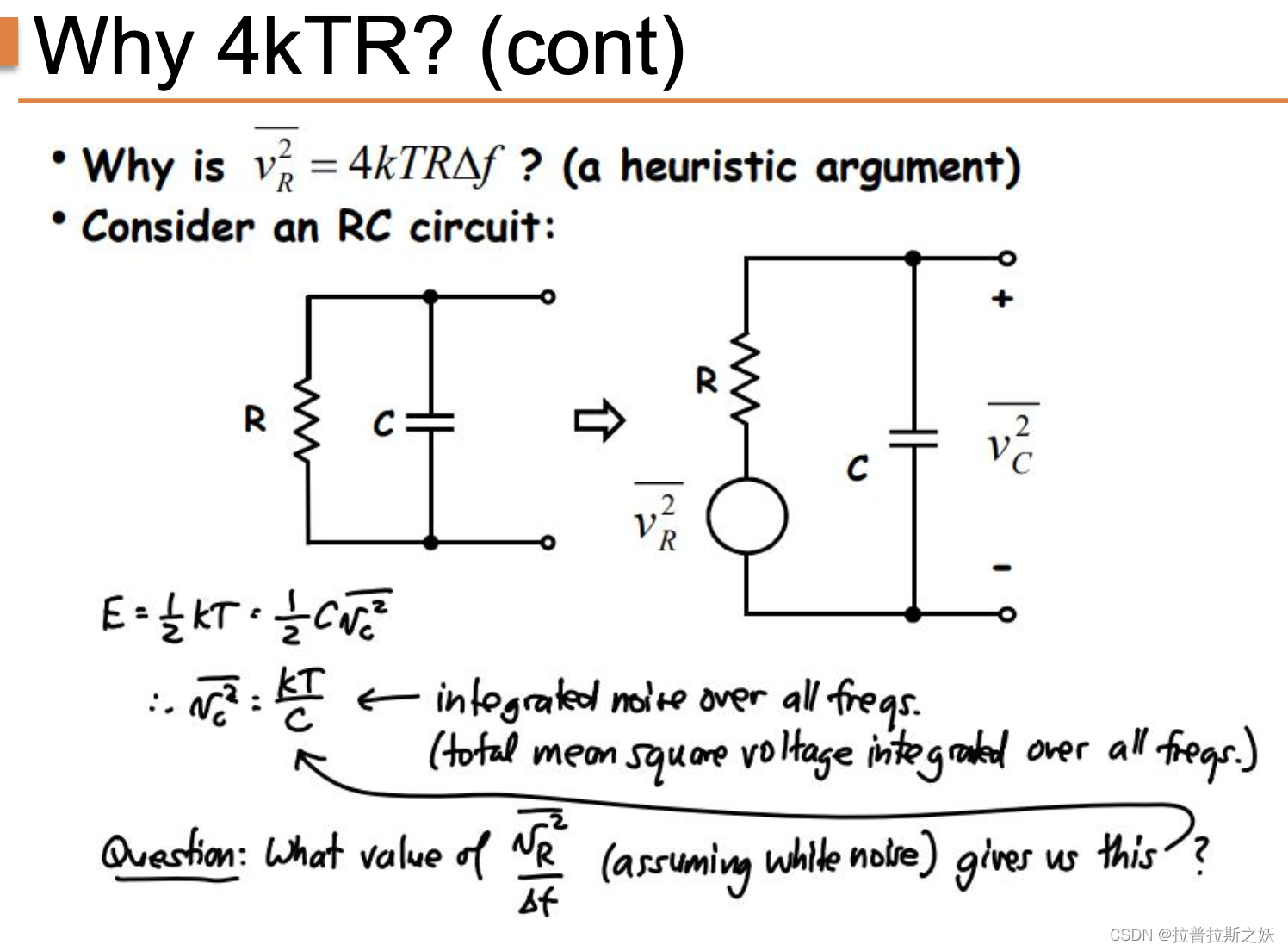
为了具体推导出 v R 2 ‾ Δ f = 4 k T R \frac{\overline{v_R^2}}{\Delta f} = 4kTR ΔfvR2=4kTR,我们考虑一个简单的RC电路,如下图所示:
- 电路中的总能量:
电容器中的能量为:
E = 1 2 C v C 2 ‾ = 1 2 k B T E = \frac{1}{2} C \overline{v_C^2} = \frac{1}{2} k_B T E=21CvC2=21kBT
因此,可以得到:
v C 2 ‾ = k B T C \overline{v_C^2} = \frac{k_B T}{C} vC2=CkBT
-
噪声电压谱密度的计算:
假设噪声是白噪声,我们计算噪声电压谱密度:
v C 2 ‾ = ∫ 0 ∞ ∣ 1 1 + j ω R C ∣ 2 v R 2 ‾ Δ f d ω \overline{v_C^2} = \int_0^\infty \left| \frac{1}{1+j\omega RC} \right|^2 \frac{\overline{v_R^2}}{\Delta f} d\omega vC2=∫0∞ 1+jωRC1 2ΔfvR2dω -
傅里叶变换与积分:
将上述积分展开,考虑滤波器传递函数:
H ( j ω ) = 1 1 + j ω R C H(j\omega) = \frac{1}{1+j\omega RC} H(jω)=1+jωRC1
将其代入积分式:
v C 2 ‾ = 1 2 π v R 2 ‾ Δ f ∫ 0 ∞ 1 1 + ( ω R C ) 2 d ω \overline{v_C^2} = \frac{1}{2\pi} \frac{\overline{v_R^2}}{\Delta f} \int_0^\infty \frac{1}{1+(\omega RC)^2} d\omega vC2=2π1ΔfvR2∫0∞1+(ωRC)21dω
由于白噪声的假设,积分结果为:
v C 2 ‾ = 1 2 π v R 2 ‾ Δ f ⋅ π R C = 1 2 π v R 2 ‾ Δ f ⋅ π τ = 1 4 ω b v R 2 ‾ Δ f = k B T C \overline{v_C^2} = \frac{1}{2\pi} \frac{\overline{v_R^2}}{\Delta f} \cdot \frac{\pi}{RC} = \frac{1}{2\pi} \frac{\overline{v_R^2}}{\Delta f} \cdot \pi \tau = \frac{1}{4} \omega_b \frac{\overline{v_R^2}}{\Delta f} = \frac{k_B T}{C} vC2=2π1ΔfvR2⋅RCπ=2π1ΔfvR2⋅πτ=41ωbΔfvR2=CkBT
其中 τ = R C \tau = RC τ=RC,是电路的时间常数。
- 最后一步推导:
因此,可以得到:
v R 2 ‾ Δ f = 4 k T R \frac{\overline{v_R^2}}{\Delta f} = 4kTR ΔfvR2=4kTR
公式 v R 2 ‾ Δ f = 4 k T R \frac{\overline{v_R^2}}{\Delta f} = 4kTR ΔfvR2=4kTR 反映了热噪声的谱密度,它表明在单位频率范围内,电阻器产生的噪声电压平方值与温度和电阻成正比。这一结果在实际电路设计和噪声分析中具有重要意义,帮助工程师估算和控制电路中的噪声水平。
3.2 Shot Noise
详细介绍了散粒噪声产生机制和特性:
- 散粒噪声:与直流电流流动有关,是白噪声,独立于温度,噪声功率与直流电流和带宽成正比。
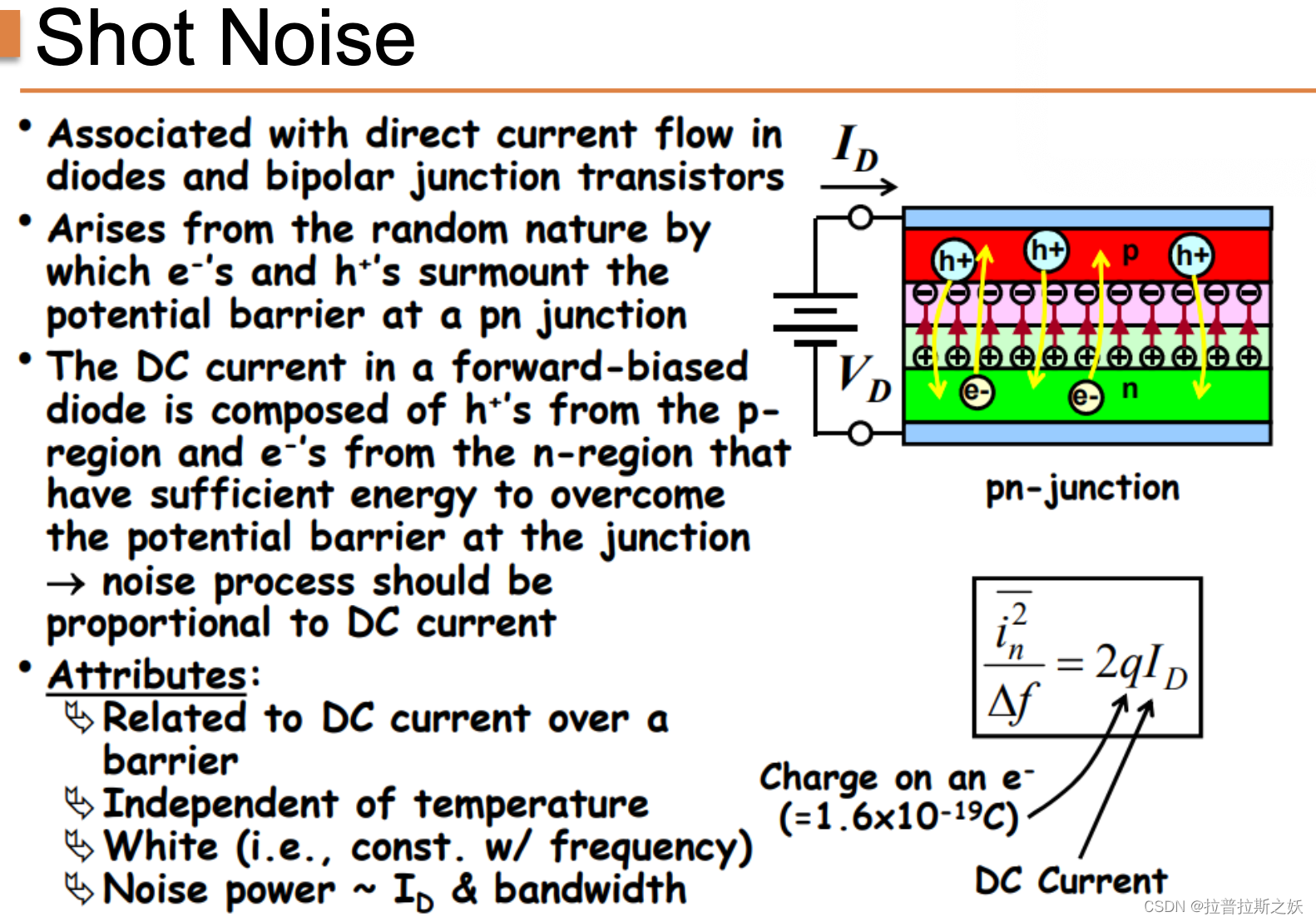
Shot Noise(散粒噪声)与二极管和双极结晶体管(BJT)中的直流电流流动有关。它源于电子和空穴在pn结处克服势垒的随机过程。
产生机制
- 随机性:散粒噪声起源于电子和空穴克服pn结势垒的随机过程。
- 直流电流:在正向偏置二极管中,直流电流由p区的空穴和n区的电子组成,这些载流子具有足够的能量克服结处的势垒。
- 噪声过程:噪声过程应该与直流电流成正比。
图示解释
- pn结:图中展示了pn结中的载流子流动,空穴从p区流向n区,电子从n区流向p区。
- 电流和电压:二极管电流 I D I_D ID 和电压 V D V_D VD 驱动载流子克服势垒。
属性
- 与直流电流相关:散粒噪声与克服势垒的直流电流相关。
- 独立于温度:散粒噪声不受温度影响。
- 白噪声:散粒噪声是白噪声,即频率恒定。
- 噪声功率:噪声功率与直流电流 I D I_D ID 和带宽成正比。
关键公式
i n 2 ‾ Δ f = 2 q I D \frac{\overline{i_n^2}}{\Delta f} = 2qI_D Δfin2=2qID
其中 q q q 是电子电荷(1.6×10⁻¹⁹库仑), I D I_D ID 是直流电流。
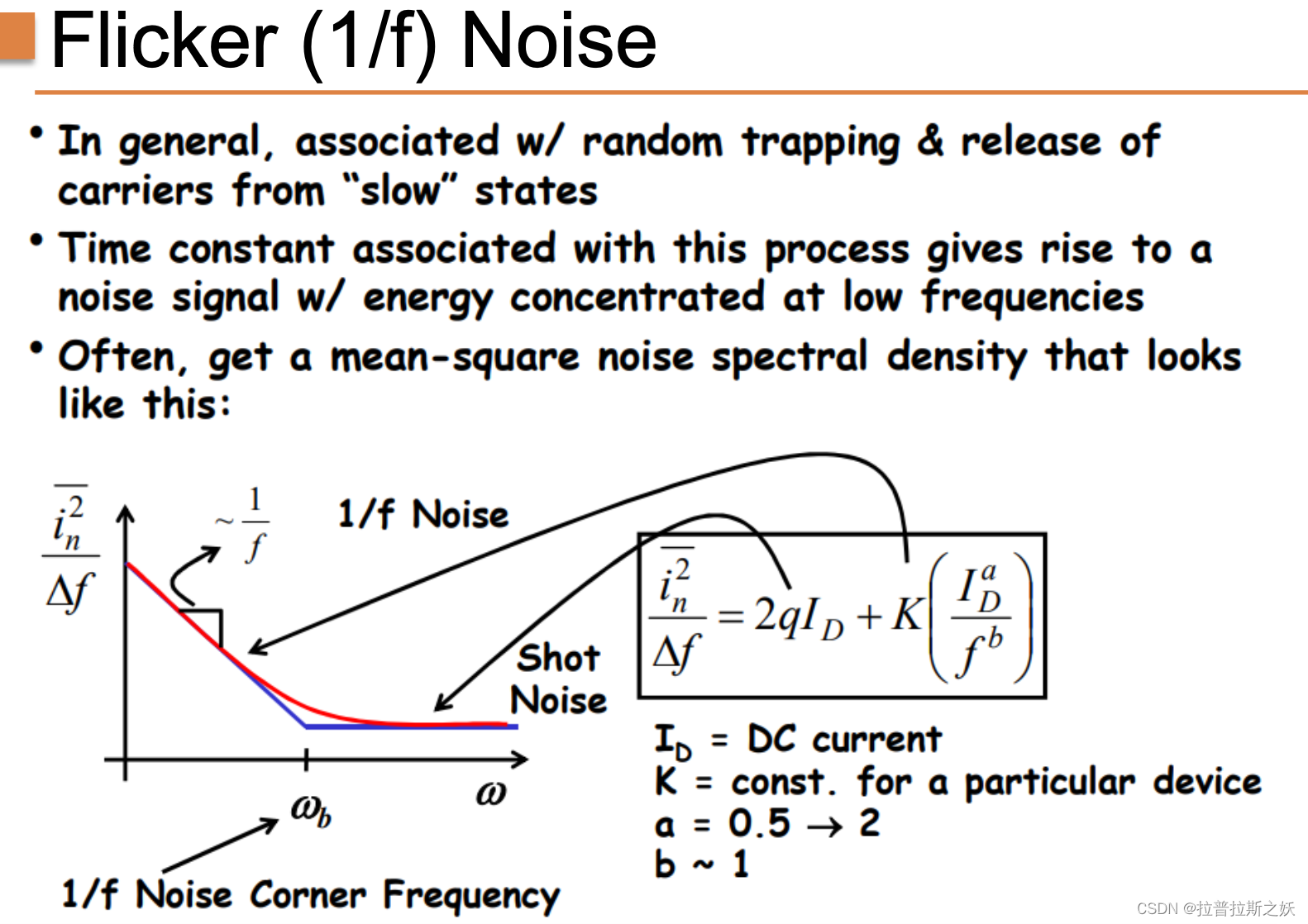
3.3 Flicker (1/f) Noise
- 闪烁噪声:与载流子的随机捕获和释放有关,频谱密度在低频处较高,表现为1/f特性。
Flicker Noise(闪烁噪声),也称为1/f噪声,与载流子从“慢态”中随机捕获和释放相关。
产生机制
- 捕获和释放:闪烁噪声通常与载流子从慢态中随机捕获和释放有关。
- 时间常数:这个过程的时间常数使得噪声信号的能量集中在低频。
- 频谱密度:通常,闪烁噪声的均方噪声谱密度随频率变化,如图所示。
图示解释
- 频谱图:图中展示了1/f噪声的频谱特性,显示出低频处的高能量特性。
- 角频率: ω b \omega_b ωb 是1/f噪声的角频率。
关键公式
i n 2 ‾ Δ f = 2 q I D + K ( I D a f b ) \frac{\overline{i_n^2}}{\Delta f} = 2qI_D + K\left(\frac{I_D^a}{f^b}\right) Δfin2=2qID+K(fbIDa)
其中:
- I D I_D ID 是直流电流。
- K K K 是一个特定设备的常数。
- a a a 和 b b b 是设备特性参数,通常 a a a 介于0.5到2之间, b b b 约为1。
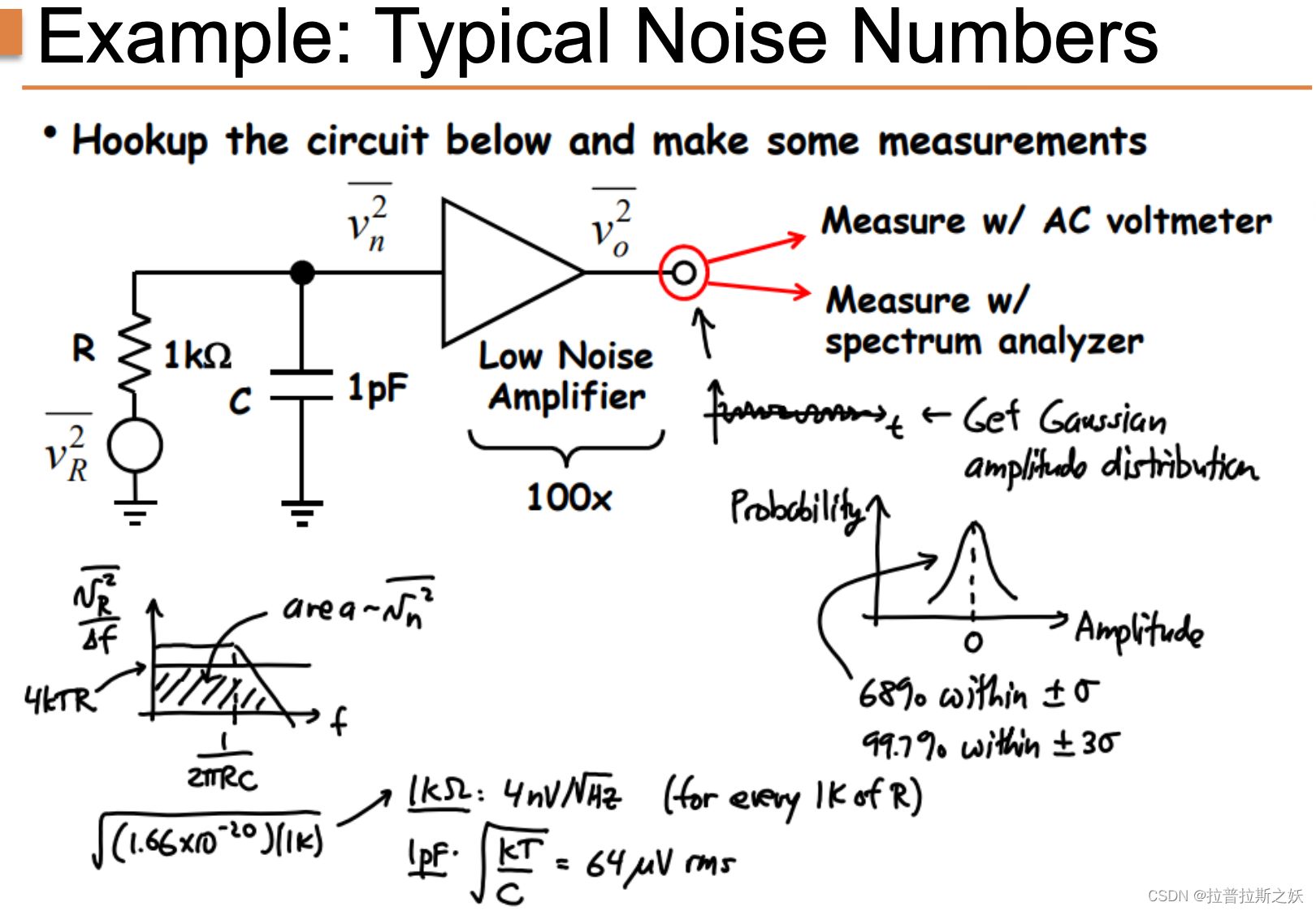
3.4 Example: Typical Noise Numbers
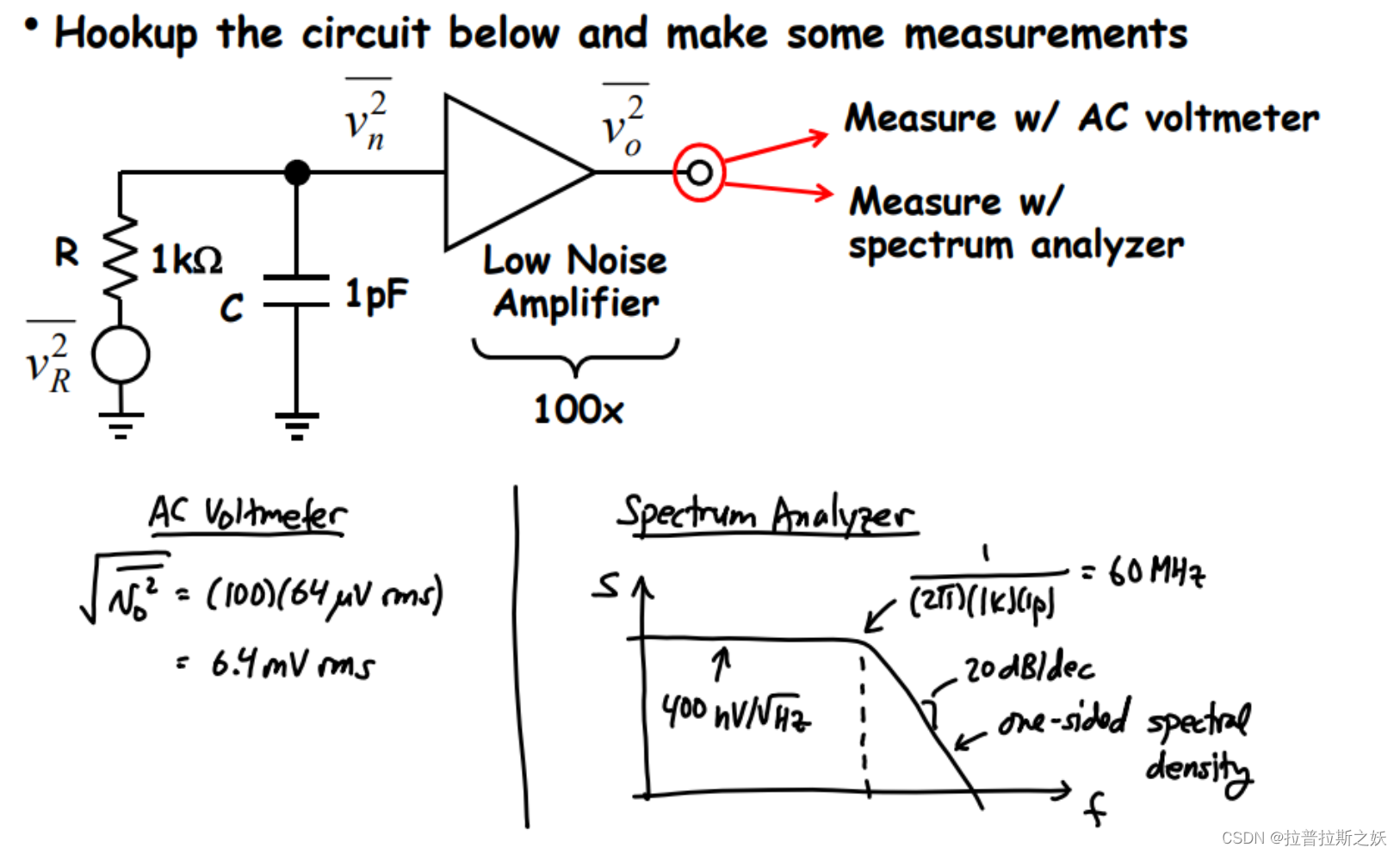
通过这个例子,我们详细解析了如何通过简单的RC电路测量和计算典型的噪声值。通过使用低噪声放大器和频谱分析仪,可以准确测量和分析电路中的噪声。
电路连接与测量
电路示例
电路由以下组件组成:
- 电阻 R R R:1 kΩ
- 电容 C C C:1 pF
- 低噪声放大器:具有100倍增益
在这个电路中,电阻和电容会产生热噪声,而低噪声放大器将这个噪声信号放大,使得我们可以更容易地测量和分析。
噪声源及其计算
热噪声电压谱密度
热噪声的电压谱密度由下式给出:
v R 2 ‾ Δ f = 4 k T R \frac{\overline{v_R^2}}{\Delta f} = 4kTR ΔfvR2=4kTR
其中:
- k k k 是玻尔兹曼常数,约为 1.38 × 1 0 − 23 J/K 1.38 \times 10^{-23} \text{J/K} 1.38×10−23J/K
- T T T 是绝对温度,假设为300 K
- R R R 是电阻值,这里为1 kΩ
将这些值代入公式中:
4 k T = 4 × 1.38 × 1 0 − 23 × 300 ≈ 1.66 × 1 0 − 20 V 2 / Hz 4kT = 4 \times 1.38 \times 10^{-23} \times 300 \approx 1.66 \times 10^{-20} \text{V}^2/\text{Hz} 4kT=4×1.38×10−23×300≈1.66×10−20V2/Hz
所以:
v R 2 ‾ Δ f = 1.66 × 1 0 − 20 × 1 kΩ = 1.66 × 1 0 − 17 V 2 / Hz \frac{\overline{v_R^2}}{\Delta f} = 1.66 \times 10^{-20} \times 1 \text{kΩ} = 1.66 \times 10^{-17} \text{V}^2/\text{Hz} ΔfvR2=1.66×10−20×1kΩ=1.66×10−17V2/Hz
为了使结果更加直观,我们通常将结果转换为 nV/√Hz 单位:
v R 2 ‾ Δ f = 1.656 × 1 0 − 17 V/√Hz \sqrt{\frac{\overline{v_R^2}}{\Delta f}} = \sqrt{1.656 \times 10^{-17}} \text{V/√Hz} ΔfvR2=1.656×10−17V/√Hz
v R 2 ‾ Δ f ≈ 4.07 × 1 0 − 9 V/√Hz \sqrt{\frac{\overline{v_R^2}}{\Delta f}} \approx 4.07 \times 10^{-9} \text{V/√Hz} ΔfvR2≈4.07×10−9V/√Hz
由于 1 nV = 1 0 − 9 10^{-9} 10−9 V,因此:
v R 2 ‾ Δ f ≈ 4.07 nV/√Hz \sqrt{\frac{\overline{v_R^2}}{\Delta f}} \approx 4.07 \text{nV/√Hz} ΔfvR2≈4.07nV/√Hz
这个结果表明,每个1 kΩ电阻在室温下对应的热噪声电压谱密度约为 4.07 nV/√Hz。为了简化表示,我们通常会将小数部分省略,因此常说为 4 nV/√Hz。
电容的噪声电压
对于电容 C C C 的热噪声电压,可以用以下公式计算:
v C 2 ‾ = k T C \overline{v_C^2} = \frac{kT}{C} vC2=CkT
将值代入公式:
v C 2 ‾ = 1.38 × 1 0 − 23 × 300 1 × 1 0 − 12 = 4.14 × 1 0 − 21 1 0 − 12 = 4.14 × 1 0 − 9 V 2 \overline{v_C^2} = \frac{1.38 \times 10^{-23} \times 300}{1 \times 10^{-12}} = \frac{4.14 \times 10^{-21}}{10^{-12}} = 4.14 \times 10^{-9} \text{V}^2 vC2=1×10−121.38×10−23×300=10−124.14×10−21=4.14×10−9V2
因此,电容的热噪声电压为:
v C = 4.14 × 1 0 − 9 ≈ 64 μ V rms v_C = \sqrt{4.14 \times 10^{-9}} \approx 64 \mu \text{V rms} vC=4.14×10−9≈64μV rms
RMS(均方根)值用于表征噪声信号的有效电压。它是平方值的均值的平方根。
总结
在这个电路中,每个1kΩ电阻对应的热噪声电压为4 nV/√Hz,而1 pF电容的热噪声电压为64 μV rms。
噪声测量
-
使用交流电压表测量:
- 低噪声放大器的增益为100倍,因此输出噪声电压为:
V o = 100 × 64 μ V rms = 6.4 mV rms V_o = 100 \times 64 \mu \text{V rms} = 6.4 \text{mV rms} Vo=100×64μV rms=6.4mV rms
- 低噪声放大器的增益为100倍,因此输出噪声电压为:
-
使用频谱分析仪测量:
- 频谱分析仪测量的是频谱密度。假设频谱密度 S S S 为400 nV/√Hz。
- 频率范围:
f = 1 2 π R C = 1 2 π × 1 k Ω × 1 p F ≈ 60 MHz f = \frac{1}{2\pi RC} = \frac{1}{2\pi \times 1kΩ \times 1pF} \approx 60 \text{MHz} f=2πRC1=2π×1kΩ×1pF1≈60MHz
假设我们测量的频率范围为60 MHz,频谱分析仪可以显示出一侧谱密度图,其中:
- 在400 nV/√Hz下,积分噪声电压平方值可以通过频率范围内的积分来计算:
v R 2 ‾ = ∫ 0 60 MHz ( 400 × 1 0 − 9 Hz ) 2 d ω \overline{v_R^2} = \int_0^{60 \text{MHz}} \left( \frac{400 \times 10^{-9}}{\sqrt{\text{Hz}}} \right)^2 d\omega vR2=∫060MHz(Hz400×10−9)2dω
由于频谱是平的,因此:
v R 2 ‾ = ( 400 × 1 0 − 9 ) 2 × 60 × 1 0 6 \overline{v_R^2} = (400 \times 10^{-9})^2 \times 60 \times 10^6 vR2=(400×10−9)2×60×106
v R 2 ‾ = 1.6 × 1 0 − 19 × 60 × 1 0 6 \overline{v_R^2} = 1.6 \times 10^{-19} \times 60 \times 10^6 vR2=1.6×10−19×60×106
v R 2 ‾ = 9.6 × 1 0 − 12 V 2 \overline{v_R^2} = 9.6 \times 10^{-12} \text{V}^2 vR2=9.6×10−12V2
所以:
v R = 9.6 × 1 0 − 12 ≈ 3.1 μ V rms v_R = \sqrt{9.6 \times 10^{-12}} \approx 3.1 \mu \text{V rms} vR=9.6×10−12≈3.1μV rms
高斯分布与概率
- 高斯分布:噪声信号通常遵循高斯分布,其幅度分布具有平均值为0,标准差为1的特性。
- 概率:在高斯分布中,68%的值落在±σ范围内,99.7%的值落在±3σ范围内。
频谱分析仪的结果
- 频谱分析仪显示的是单侧谱密度(one-sided spectral density),通过积分得到总噪声电压。
- 在400 nV/√Hz的密度下,积分结果为60 MHz范围内的总噪声电压平方值。
4. Equivalent Input-Referred Voltage and Current Noise Sources
4.1 等效输入噪声源模型
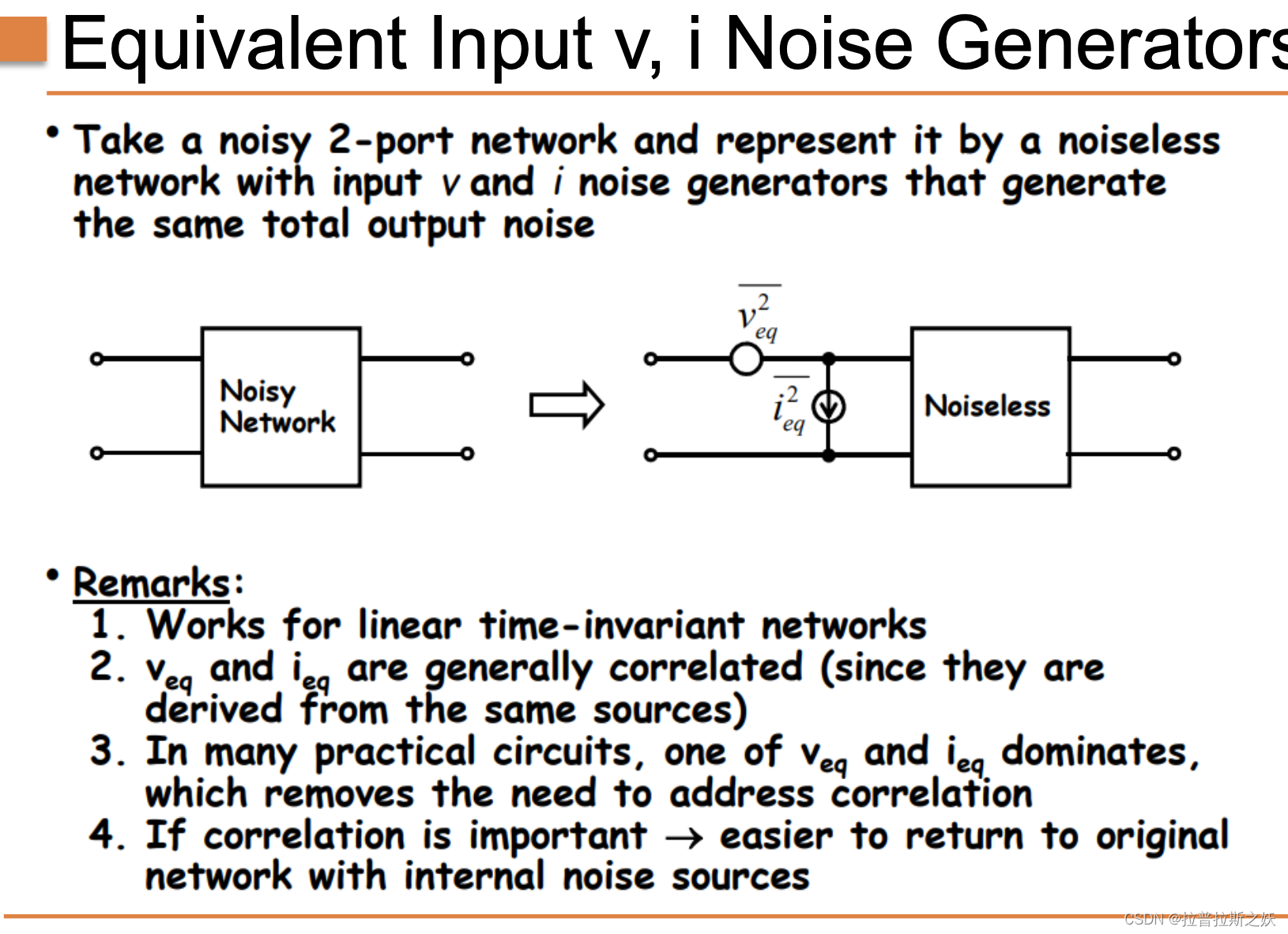
在电子系统中,噪声是一个不可避免的问题,它影响了系统的性能和精度。为了分析和减小噪声的影响,我们常常会使用等效噪声源模型来简化和理解复杂的噪声问题。这张图示提供了如何用等效输入电压和电流噪声源来表示一个含噪的二端口网络(two-port network),以便于分析和处理。
4.1.1 基本原理
图示描述了一个带有噪声的二端口网络,通过等效噪声源模型,将其转换为一个等效的无噪声网络。等效噪声源包括等效输入电压噪声(( v_{\text{eq}} ))和等效输入电流噪声(( i_{\text{eq}} )),这些噪声源产生的总输出噪声与原始噪声网络相同。
-
带噪网络(Noisy Network):这是一个含有噪声的实际网络,其噪声来自于各种内部和外部的干扰源。
-
等效噪声源(Equivalent Noise Sources):通过分析,原网络中的噪声可以简化为两个等效的噪声源,一个是电压噪声源(( v_{\text{eq}} )),另一个是电流噪声源(( i_{\text{eq}} ))。
-
无噪声网络(Noiseless Network):这是一个理想的无噪声网络,通过引入等效噪声源来保持原网络的噪声特性。
-
适用于线性时不变网络(Linear Time-Invariant Networks):这种等效模型的前提条件是网络必须是线性且时不变的。线性意味着系统的输出是输入的线性函数,时不变则意味着系统的特性不会随时间变化。
-
电压和电流噪声源通常是相关的(Correlated):( v_{\text{eq}} ) 和 ( i_{\text{eq}} ) 通常是相关的,因为它们往往源于相同的噪声源。例如,热噪声和器件噪声都可能同时影响电压和电流。
-
在许多实际电路中,电压或电流噪声源会占主导地位(Dominates):在一些实际应用中,可能一个噪声源(例如电压噪声)比另一个噪声源(例如电流噪声)更为显著,这时可以只关注主要的噪声源,简化分析。
-
如果相关性很重要,更容易返回到原始网络进行分析(Original Network Analysis):在某些情况下,噪声源之间的相关性非常重要,这时可以通过回到原始的含噪网络,来进行更准确的分析。
4.1.2 等效输入噪声源 v eq 2 v_{\text{eq}}^2 veq2 和 i eq 2 i_{\text{eq}}^2 ieq2 的计算
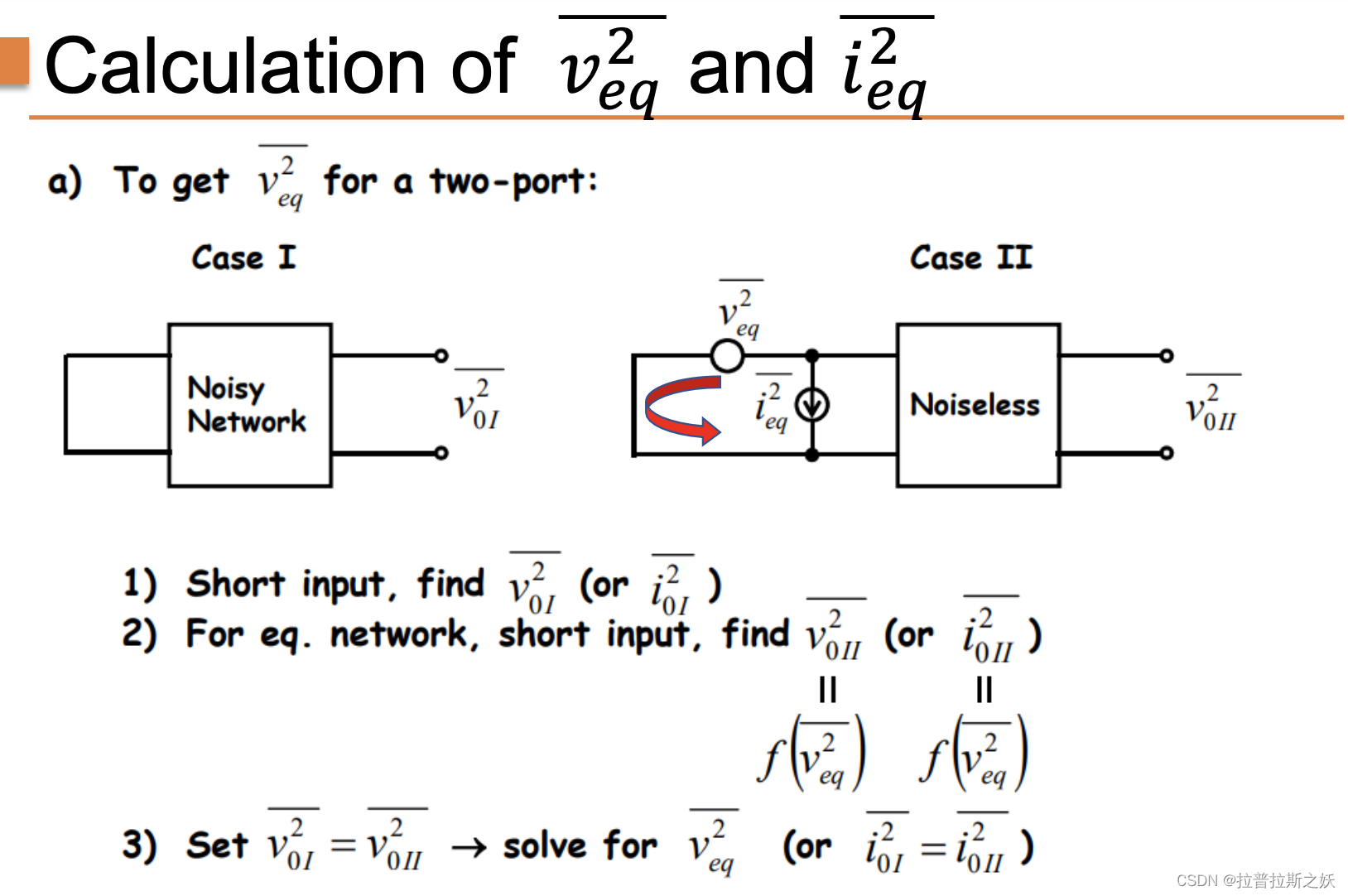
a) 计算等效输入电压噪声源 v eq 2 v_{\text{eq}}^2 veq2
为了得到二端口网络的等效输入电压噪声源 v eq 2 v_{\text{eq}}^2 veq2,我们可以按以下步骤进行:
-
短路输入,测量输出噪声 v 0 I 2 v_{0I}^2 v0I2 或 i 0 I 2 i_{0I}^2 i0I2:首先,将原含噪声网络的输入端短路,测量输出端的噪声电压或噪声电流。记下此时的噪声电压为 v 0 I 2 v_{0I}^2 v0I2。
Short input, find v 0 I 2 (or i 0 I 2 ) \text{Short input, find } v_{0I}^2 \text{ (or } i_{0I}^2 \text{)} Short input, find v0I2 (or i0I2)
-
对于等效网络,短路输入,测量输出噪声 v 0 I I 2 v_{0II}^2 v0II2 或 i 0 I I 2 i_{0II}^2 i0II2:然后,在等效网络中,也将输入端短路,测量输出端的噪声电压或噪声电流。记下此时的噪声电压为 v 0 I I 2 v_{0II}^2 v0II2。
For eq. network, short input, find v 0 I I 2 (or i 0 I I 2 ) \text{For eq. network, short input, find } v_{0II}^2 \text{ (or } i_{0II}^2 \text{)} For eq. network, short input, find v0II2 (or i0II2)
-
设定 v 0 I 2 = v 0 I I 2 v_{0I}^2 = v_{0II}^2 v0I2=v0II2,求解 v eq 2 v_{\text{eq}}^2 veq2 或 i eq 2 i_{\text{eq}}^2 ieq2:最后,将测得的两个输出噪声电压设为相等,求解出等效输入电压噪声源 v eq 2 v_{\text{eq}}^2 veq2。
v 0 I 2 = v 0 I I 2 ⇒ solve for v eq 2 (or i eq 2 ) v_{0I}^2 = v_{0II}^2 \Rightarrow \text{solve for } v_{\text{eq}}^2 \text{ (or } i_{\text{eq}}^2 \text{)} v0I2=v0II2⇒solve for veq2 (or ieq2)
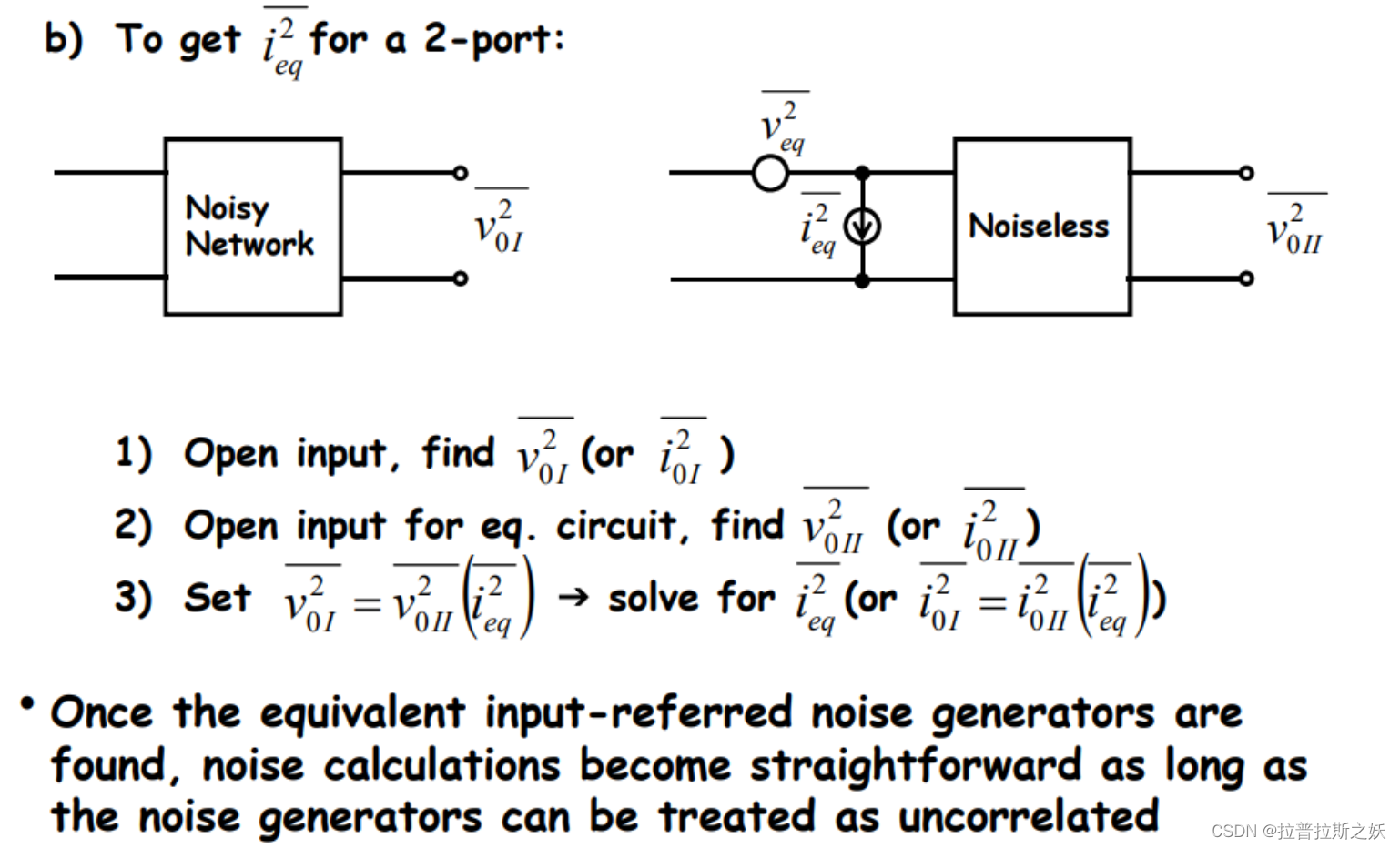
b) 计算等效输入电流噪声源 i eq 2 i_{\text{eq}}^2 ieq2
类似地,为了得到二端口网络的等效输入电流噪声源 i eq 2 i_{\text{eq}}^2 ieq2,可以按照以下步骤进行:
-
开路输入,测量输出噪声 v 0 I 2 v_{0I}^2 v0I2 或 i 0 I 2 i_{0I}^2 i0I2:首先,将原含噪声网络的输入端开路,测量输出端的噪声电压或噪声电流。记下此时的噪声电压为 v 0 I 2 v_{0I}^2 v0I2。
Open input, find v 0 I 2 (or i 0 I 2 ) \text{Open input, find } v_{0I}^2 \text{ (or } i_{0I}^2 \text{)} Open input, find v0I2 (or i0I2)
-
对于等效网络,开路输入,测量输出噪声 v 0 I I 2 v_{0II}^2 v0II2 或 i 0 I I 2 i_{0II}^2 i0II2:然后,在等效网络中,也将输入端开路,测量输出端的噪声电压或噪声电流。记下此时的噪声电压为 v 0 I I 2 v_{0II}^2 v0II2。
Open input for eq. circuit, find v 0 I I 2 (or i 0 I I 2 ) \text{Open input for eq. circuit, find } v_{0II}^2 \text{ (or } i_{0II}^2 \text{)} Open input for eq. circuit, find v0II2 (or i0II2)
-
设定 v 0 I 2 = v 0 I I 2 v_{0I}^2 = v_{0II}^2 v0I2=v0II2,求解 i eq 2 i_{\text{eq}}^2 ieq2:最后,将测得的两个输出噪声电压设为相等,求解出等效输入电流噪声源 i eq 2 i_{\text{eq}}^2 ieq2。
v 0 I 2 = v 0 I I 2 ( i eq ) ⇒ solve for i eq 2 (or i 0 I 2 = i 0 I I 2 ( i eq ) ) v_{0I}^2 = v_{0II}^2 \left( i_{\text{eq}} \right) \Rightarrow \text{solve for } i_{\text{eq}}^2 \text{ (or } i_{0I}^2 = i_{0II}^2 \left( i_{\text{eq}} \right) \text{)} v0I2=v0II2(ieq)⇒solve for ieq2 (or i0I2=i0II2(ieq))
4.1.3 在不需要考虑相关性的情况下进行噪声分析
在电子电路设计中,等效噪声源模型可以帮助我们简化复杂的噪声分析。然而,某些情况下噪声源之间的相关性可以被忽略,从而简化计算过程。这种情况下,我们只需要考虑主要的噪声源而无需处理复杂的相关性问题。以下是两种常见的可以忽略相关性的情况。
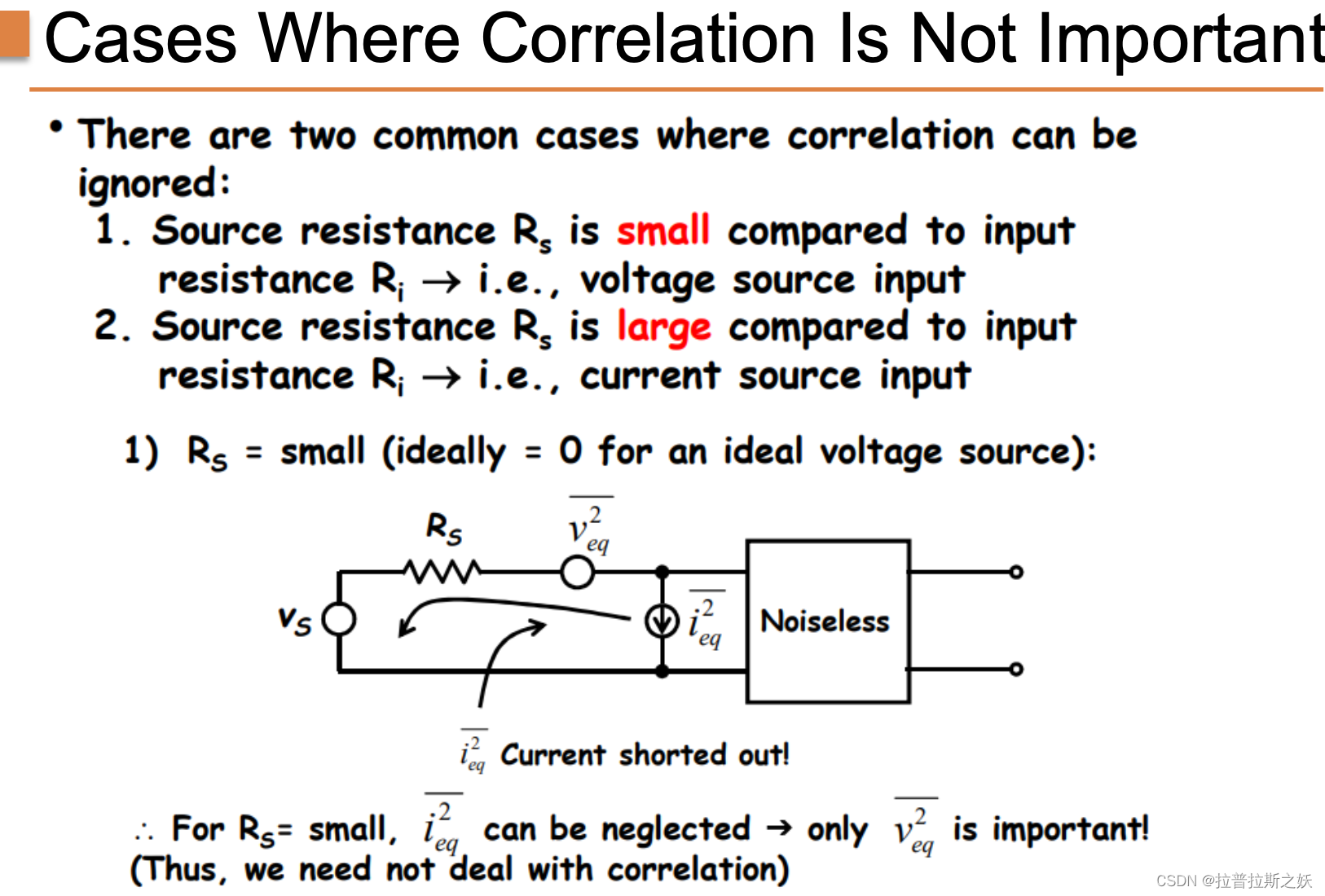
1. 源阻抗 R s R_s Rs 较小的情况
当源阻抗 R s R_s Rs 相对于输入阻抗 R i R_i Ri 较小时(理想情况下为零,例如理想的电压源),我们可以忽略电流噪声源 i eq 2 i_{\text{eq}}^2 ieq2 的影响,只考虑电压噪声源 v eq 2 v_{\text{eq}}^2 veq2。
分析步骤:
- 短路电流源:由于 R s R_s Rs 很小,等效输入电流噪声源的影响几乎可以忽略。电流源的电流会被短路掉,等效为没有电流噪声。
- 只考虑电压噪声源:此时,电压噪声源 v eq 2 v_{\text{eq}}^2 veq2 成为主要的噪声贡献者。因此,我们只需要考虑等效输入电压噪声源的影响。
图中展示了当 R s R_s Rs 较小时的情况:电流噪声被短路,因而可以忽略,只考虑电压噪声。
R s small ⇒ i eq 2 can be neglected ⇒ only v eq 2 is important R_s \text{ small} \Rightarrow i_{\text{eq}}^2 \text{ can be neglected} \Rightarrow \text{only } v_{\text{eq}}^2 \text{ is important} Rs small⇒ieq2 can be neglected⇒only veq2 is important
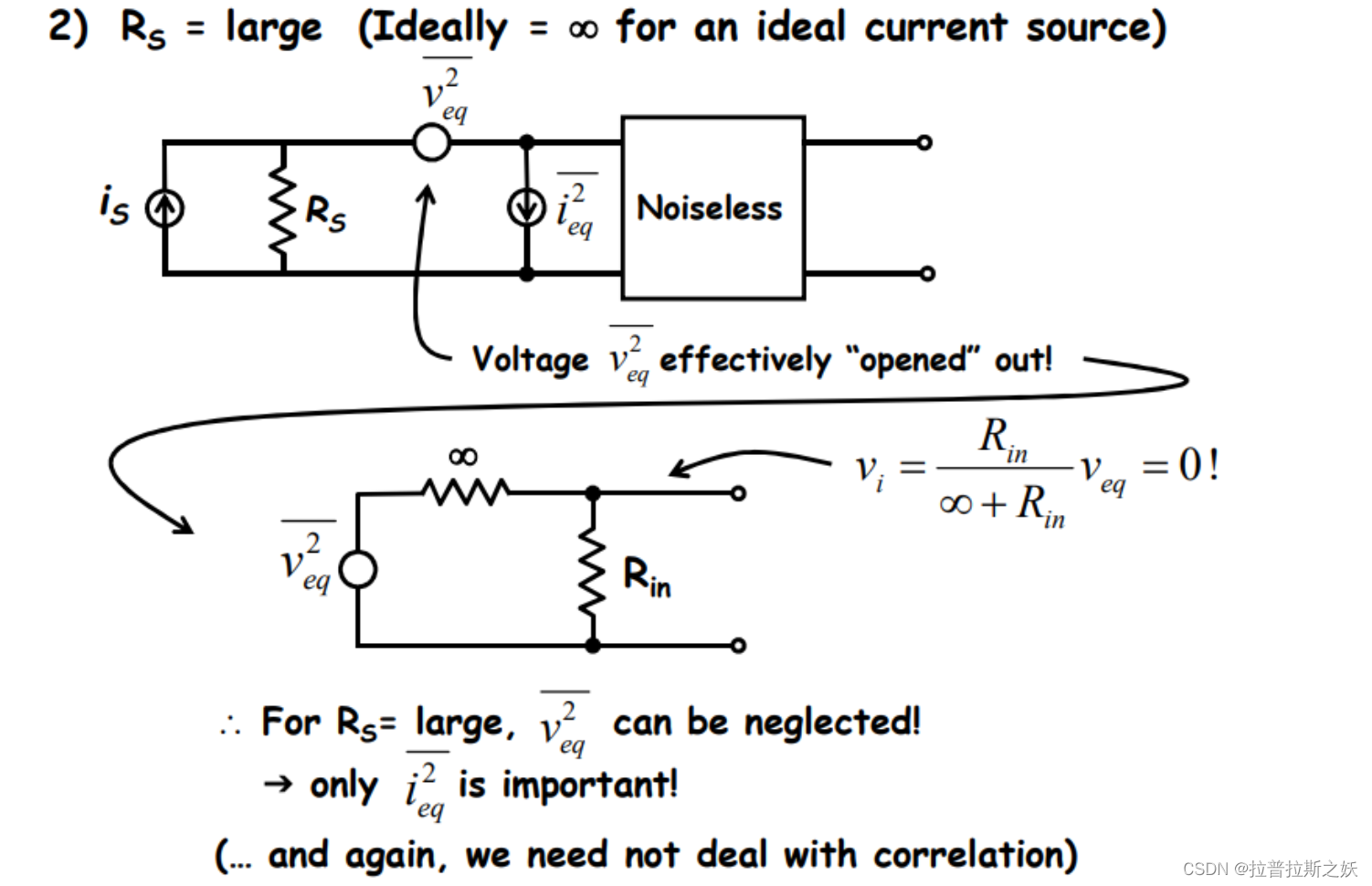
2. 源阻抗 R s R_s Rs 较大的情况
当源阻抗 R s R_s Rs 相对于输入阻抗 R i R_i Ri 较大时(理想情况下为无穷大,例如理想的电流源),我们可以忽略电压噪声源 v eq 2 v_{\text{eq}}^2 veq2 的影响,只考虑电流噪声源 i eq 2 i_{\text{eq}}^2 ieq2。
分析步骤:
- 开路电压源:由于 R s R_s Rs 很大,等效输入电压噪声源的影响几乎可以忽略。电压源的电压会被开路掉,等效为没有电压噪声。
- 只考虑电流噪声源:此时,电流噪声源 i eq 2 i_{\text{eq}}^2 ieq2 成为主要的噪声贡献者。因此,我们只需要考虑等效输入电流噪声源的影响。
图中展示了当 R s R_s Rs 较大时的情况:电压噪声被开路,因而可以忽略,只考虑电流噪声。
R s large ⇒ v eq 2 can be neglected ⇒ only i eq 2 is important R_s \text{ large} \Rightarrow v_{\text{eq}}^2 \text{ can be neglected} \Rightarrow \text{only } i_{\text{eq}}^2 \text{ is important} Rs large⇒veq2 can be neglected⇒only ieq2 is important
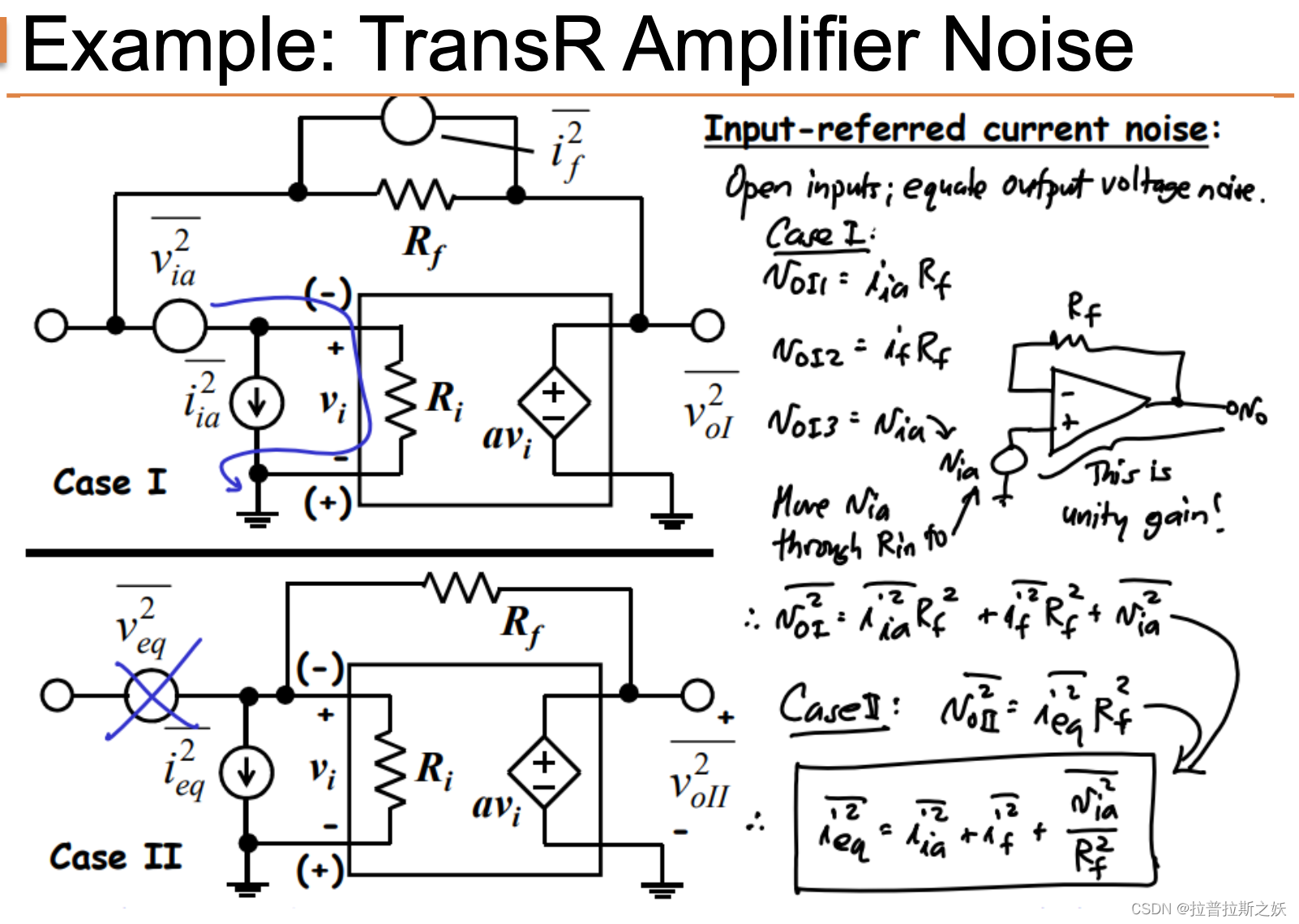
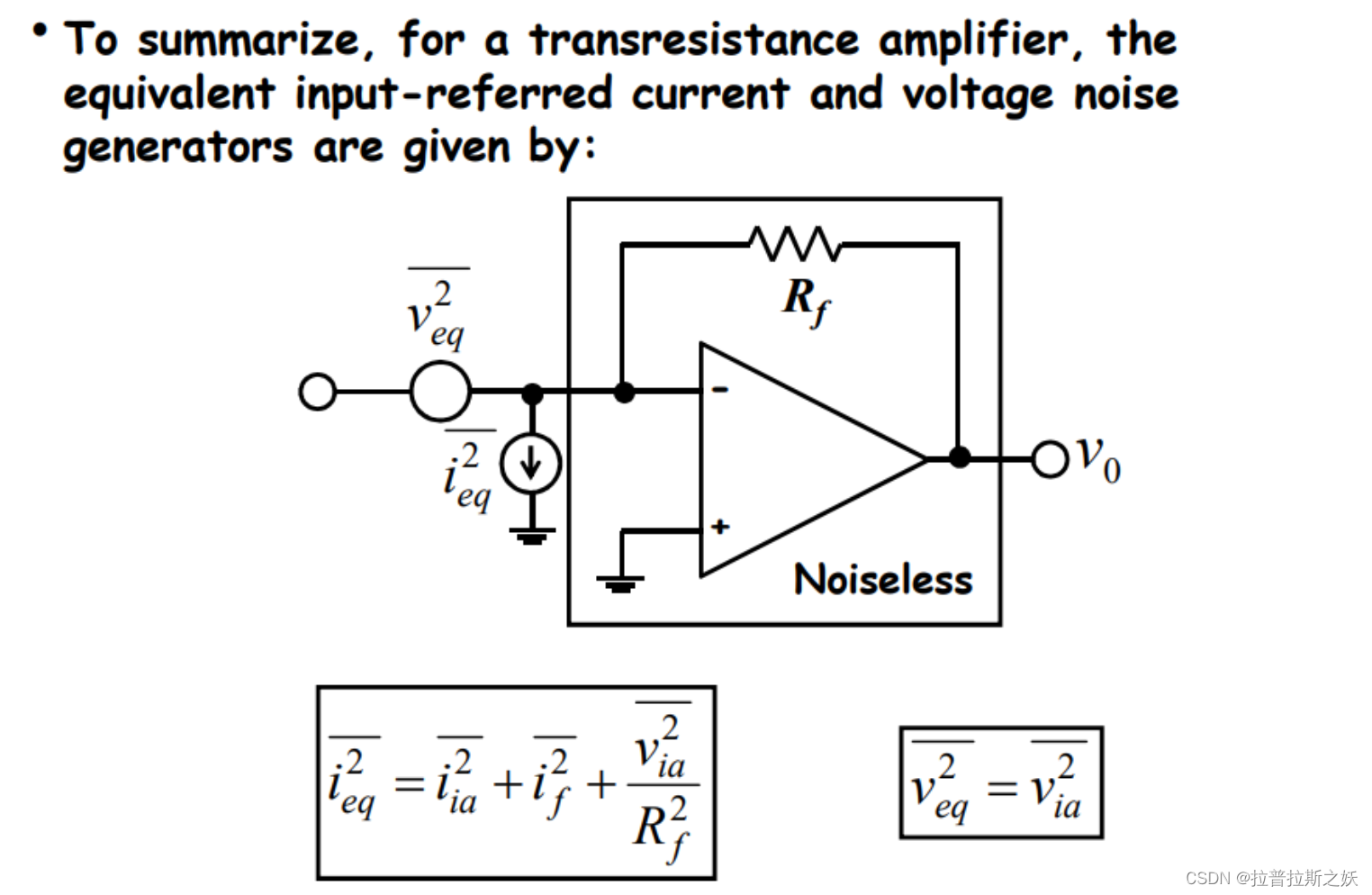
4.2 跨阻放大器(Transresistance Amplifier, TransR)分析示例
跨阻放大器(Transresistance Amplifier, TransR)是一种常见的放大器类型,通常用于将电流信号转换为电压信号。在分析跨阻放大器的噪声特性时,我们通常会采用等效输入噪声源模型来简化分析。

4.3 陀螺仪最小可检测信号(Gyro MDS)分析实例
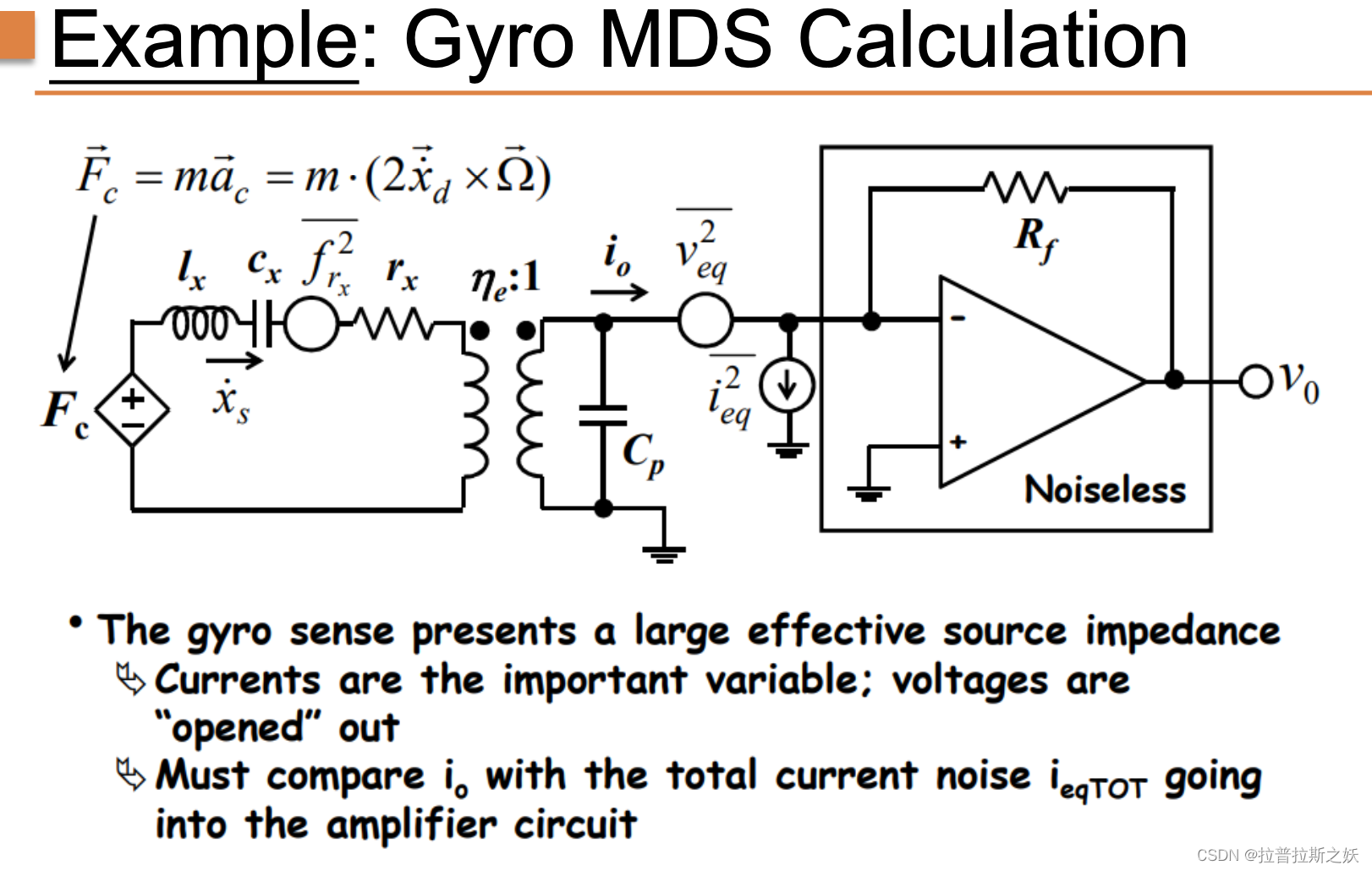
一、陀螺仪传感的等效电路模型
如图所示,陀螺仪的等效电路模型中包括以下部分:
-
传感元件的力 F c F_c Fc:
F ⃗ c = m a ⃗ c = m ⋅ ( 2 x ⃗ d × Ω ⃗ ) \vec{F}_c = m \vec{a}_c = m \cdot (2 \vec{x}_d \times \vec{\Omega}) Fc=mac=m⋅(2xd×Ω)
其中, m m m 为质量, a ⃗ c \vec{a}_c ac 为科里奥利加速度, x ⃗ d \vec{x}_d xd 为位移, Ω ⃗ \vec{\Omega} Ω 为角速度。 -
电感 L x L_x Lx、电容 C x C_x Cx、电阻 R x R_x Rx 组成的传感器元件:
这些元件组合形成了传感器的基本响应特性。 -
转换系数 η e \eta_e ηe:
该系数将机械运动转换为电信号。 -
等效输入噪声源 v e q 2 v_{eq}^2 veq2 和 i e q 2 i_{eq}^2 ieq2**:
将各种噪声源等效为输入噪声源,便于与信号进行比较。
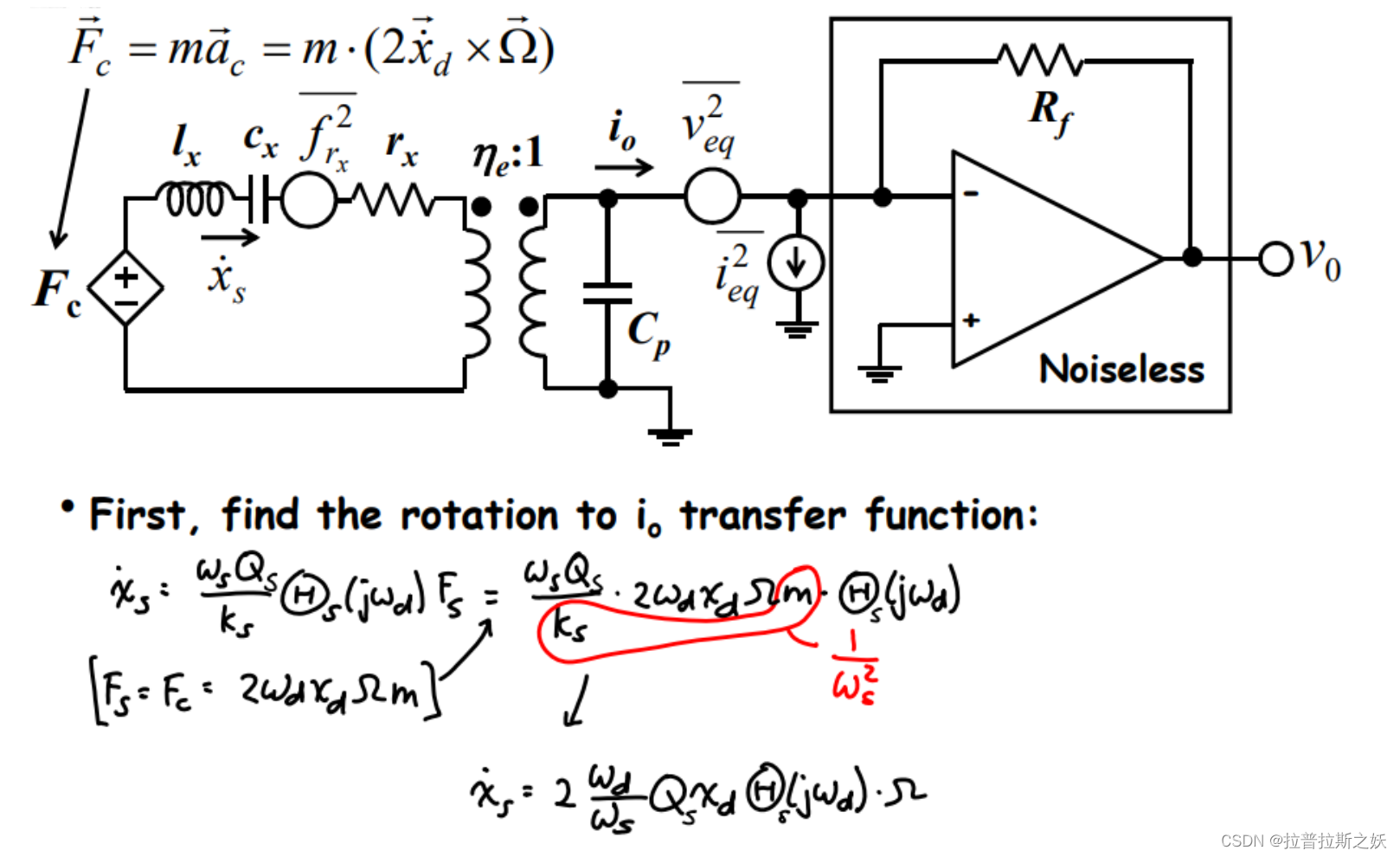
二、计算输出电流和旋转速度的传递函数
-
确定传递函数:
首先,需要找到旋转速度 Ω \Omega Ω 到输出电流 i o i_o io 的传递函数:
x ˙ s = ω s Q s k s H s ( j ω d ) F s = ω s Q s k s ⋅ 2 ω d x d Ω m ⋅ H s ( j ω d ) ⋅ 1 ω s 2 \dot{x}_s = \frac{\omega_s Q_s}{k_s} H_s(j\omega_d) F_s = \frac{\omega_s Q_s}{k_s} \cdot 2 \omega_d x_d \Omega m \cdot H_s(j\omega_d) \cdot \frac{1}{\omega_s^2} x˙s=ksωsQsHs(jωd)Fs=ksωsQs⋅2ωdxdΩm⋅Hs(jωd)⋅ωs21
其中, H s ( j ω d ) H_s(j\omega_d) Hs(jωd) 是系统的频率响应函数, ω s \omega_s ωs 是固有频率, Q s Q_s Qs 是品质因数, k s k_s ks 是弹簧常数, F s F_s Fs 是输入力。于是有:
x ˙ s = 2 ω d ω s Q s x d H s ( j ω d ) Ω \dot{x}_s = 2 \frac{\omega_d}{\omega_s} Q_s x_d H_s(j\omega_d) \Omega x˙s=2ωsωdQsxdHs(jωd)Ω -
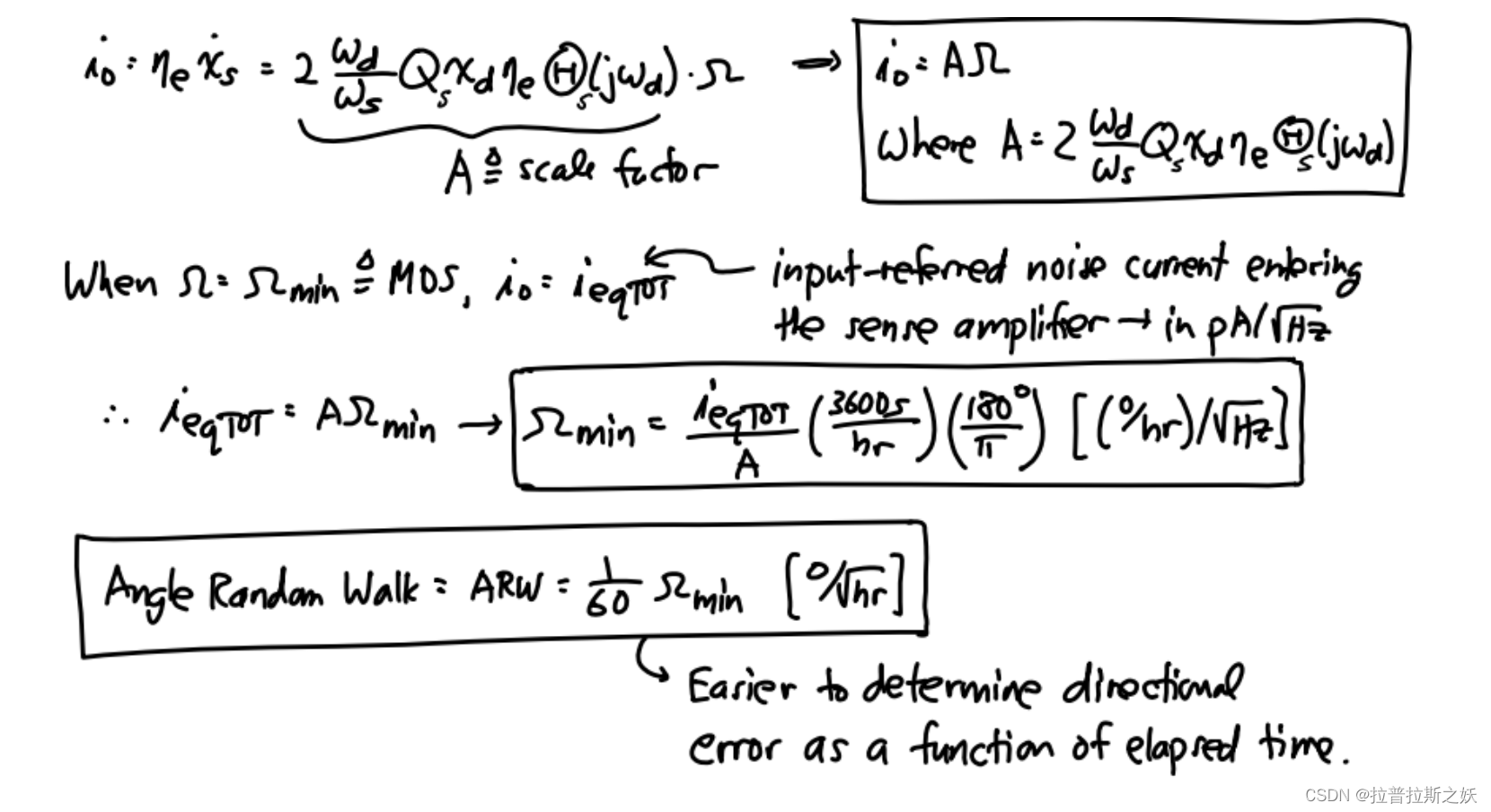
输出电流 i o i_o io 的计算:
将位移转换为电流:
i o = η e x ˙ s = 2 ω d ω s Q s x d η e H s ( j ω d ) Ω i_o = \eta_e \dot{x}_s = 2 \frac{\omega_d}{\omega_s} Q_s x_d \eta_e H_s(j\omega_d) \Omega io=ηex˙s=2ωsωdQsxdηeHs(jωd)Ω
这里, η e \eta_e ηe 是电转换系数。令 A = 2 ω d ω s Q s x d η e H s ( j ω d ) A = 2 \frac{\omega_d}{\omega_s} Q_s x_d \eta_e H_s(j\omega_d) A=2ωsωdQsxdηeHs(jωd),则有:
i o = A Ω i_o = A \Omega io=AΩ
三、确定最小可检测信号(MDS)
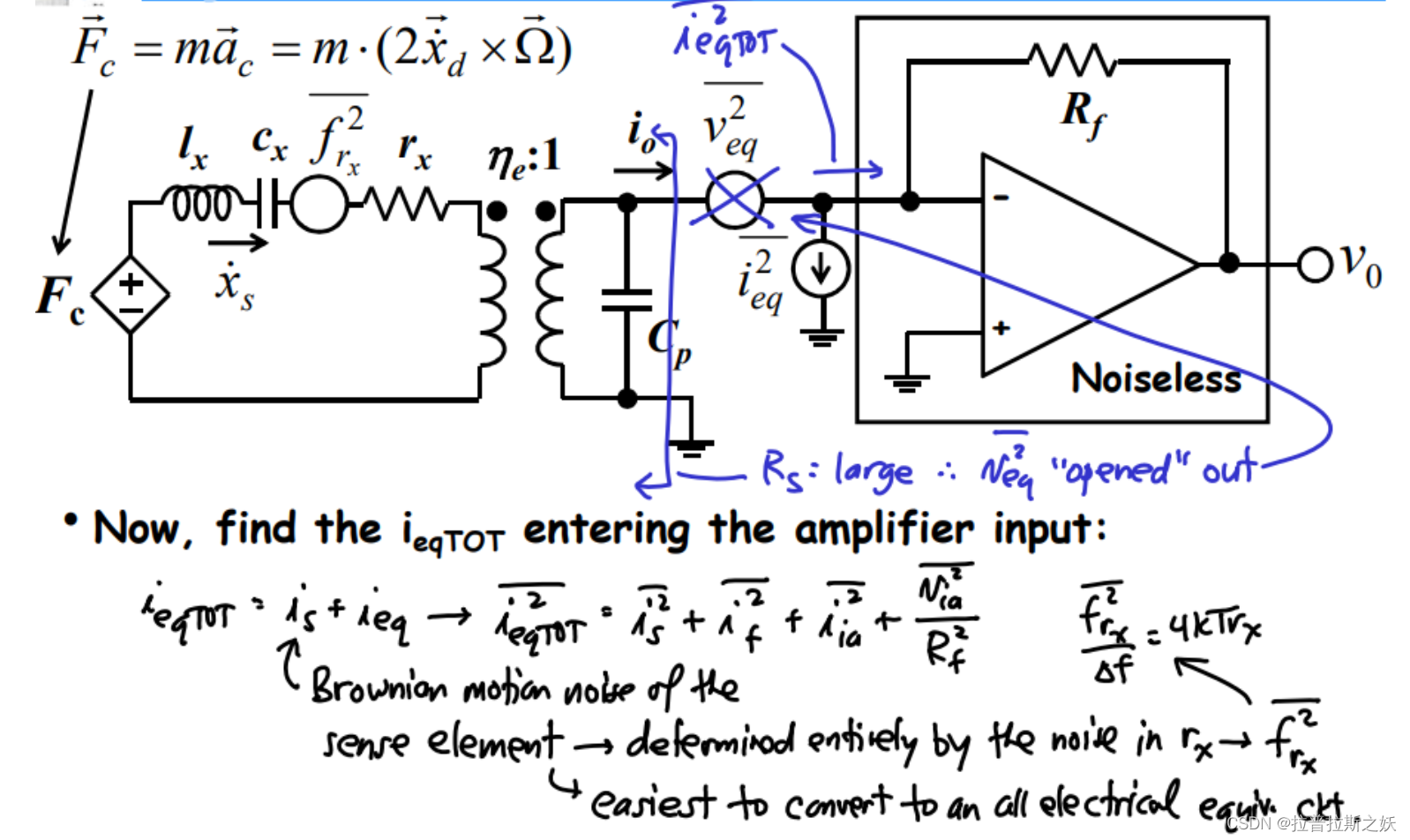
-
输入参照噪声电流:
输入参照噪声电流 i e q T O T i_{eqTOT} ieqTOT 表示进入放大器的总噪声电流。需要将各种噪声源的贡献累加起来:
i e q T O T = i s + i e q i_{eqTOT} = i_s + i_{eq} ieqTOT=is+ieq
其中, i s i_s is 是传感元件的噪声, i e q i_{eq} ieq 是放大器的等效输入噪声。 -
总噪声电流的计算:
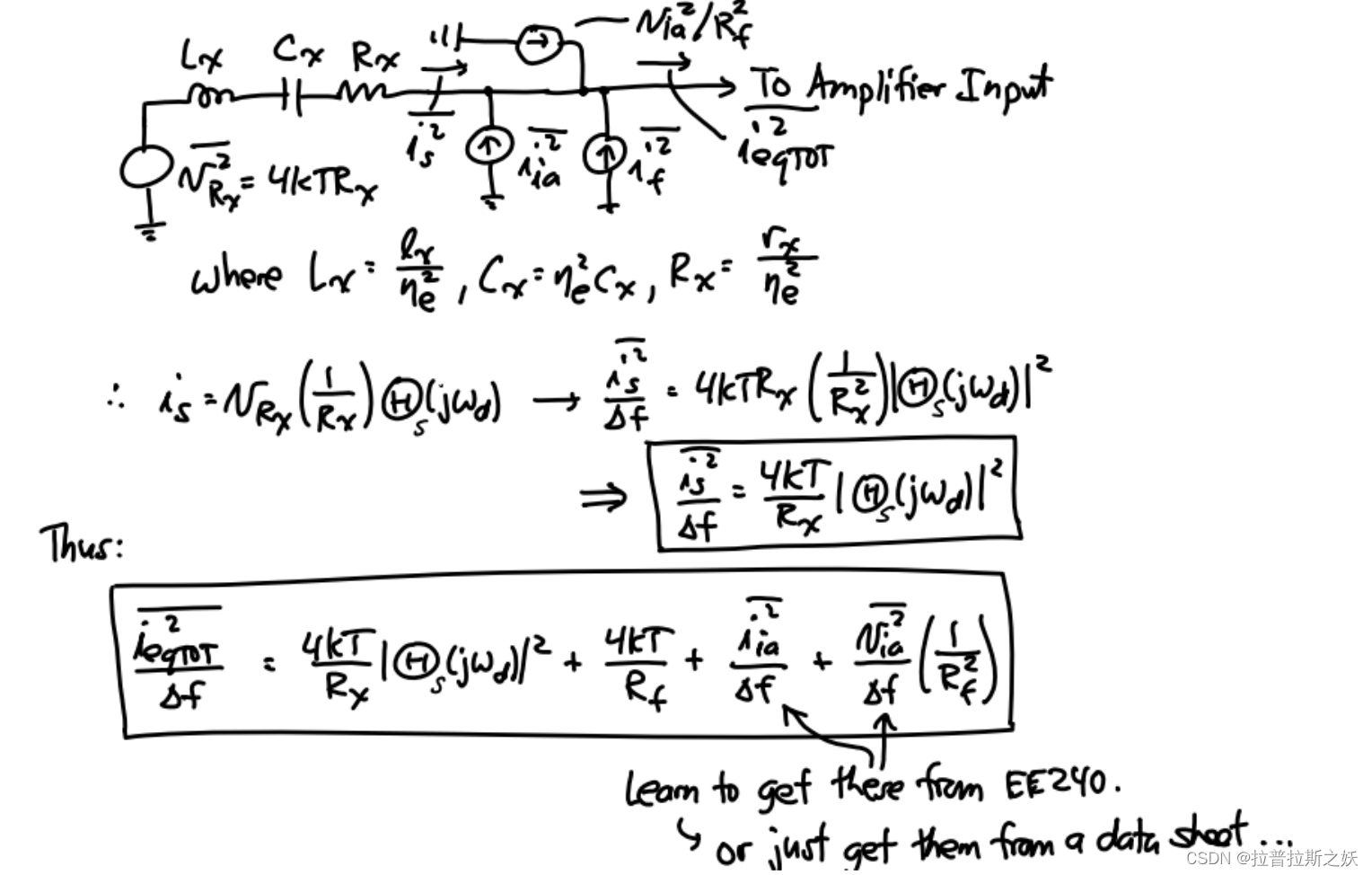
i e q T O T 2 ‾ = i s 2 ‾ + i f 2 ‾ + N a 2 ‾ R f 2 + f R x 2 ‾ Δ f = 4 k T R x \overline{i_{eqTOT}^2} = \overline{i_s^2} + \overline{i_f^2} + \frac{\overline{N_a^2}}{R_f^2} + \frac{\overline{f_{R_x}^2}}{\Delta f} = 4 k T R_x ieqTOT2=is2+if2+Rf2Na2+ΔffRx2=4kTRx
其中, f R x 2 ‾ \overline{f_{R_x}^2} fRx2 是电阻的热噪声, R x R_x Rx 是电阻值。 -
计算MDS:
当旋转角速度 Ω \Omega Ω 等于最小可检测信号 Ω min \Omega_{\text{min}} Ωmin 时,输出电流 i o i_o io 等于总的输入参照噪声电流 i e q T O T i_{eqTOT} ieqTOT,即:
i o = i e q T O T i_o = i_{eqTOT} io=ieqTOT
因此,可以解得最小可检测信号:
Ω min = i e q T O T A \Omega_{\text{min}} = \frac{i_{eqTOT}}{A} Ωmin=AieqTOT
四、示例计算
-
计算比例因子 A A A:
根据给定的系统参数,计算比例因子 A A A。例如:
A = 2 ω d ω s Q s x d η e H s ( j ω d ) A = 2 \frac{\omega_d}{\omega_s} Q_s x_d \eta_e H_s(j\omega_d) A=2ωsωdQsxdηeHs(jωd)
假设 ω d = 2000 rad/s \omega_d = 2000 \, \text{rad/s} ωd=2000rad/s、 ω s = 1500 rad/s \omega_s = 1500 \, \text{rad/s} ωs=1500rad/s、 Q s = 100 Q_s = 100 Qs=100、 x d = 0.01 m x_d = 0.01 \, \text{m} xd=0.01m、 η e = 0.5 \eta_e = 0.5 ηe=0.5、 H s ( j ω d ) = 1 H_s(j\omega_d) = 1 Hs(jωd)=1,则:
A = 2 2000 1500 ⋅ 100 ⋅ 0.01 ⋅ 0.5 ⋅ 1 = 1.33 A = 2 \frac{2000}{1500} \cdot 100 \cdot 0.01 \cdot 0.5 \cdot 1 = 1.33 A=215002000⋅100⋅0.01⋅0.5⋅1=1.33 -
计算最小可检测信号 Ω min \Omega_{\text{min}} Ωmin:
假设输入参照噪声电流 i e q T O T = 10 pA / Hz i_{eqTOT} = 10 \, \text{pA}/\sqrt{\text{Hz}} ieqTOT=10pA/Hz,则:
Ω min = 10 pA / Hz 1.33 = 7.52 pA / Hz \Omega_{\text{min}} = \frac{10 \, \text{pA}/\sqrt{\text{Hz}}}{1.33} = 7.52 \, \text{pA}/\sqrt{\text{Hz}} Ωmin=1.3310pA/Hz=7.52pA/Hz
五、角随机游走(ARW)的计算
角随机游走(Angle Random Walk, ARW)表示为:
ARW = 1 60 Ω min ( ° hr ) \text{ARW} = \frac{1}{60} \Omega_{\text{min}} \left( \frac{\degree}{\sqrt{\text{hr}}} \right) ARW=601Ωmin(hr°)
例如,根据前述 Ω min \Omega_{\text{min}} Ωmin 计算,ARW 为:
ARW = 1 60 × 7.52 ( ° hr ) = 0.125 ° hr \text{ARW} = \frac{1}{60} \times 7.52 \left( \frac{\degree}{\sqrt{\text{hr}}} \right) = 0.125 \, \frac{\degree}{\sqrt{\text{hr}}} ARW=601×7.52(hr°)=0.125hr°
通过上述详细的计算步骤,我们可以清晰地理解陀螺仪最小可检测信号(MDS)和角随机游走(ARW)的计算过程。
LF356运算放大器数据表
-
低输入噪声电流:
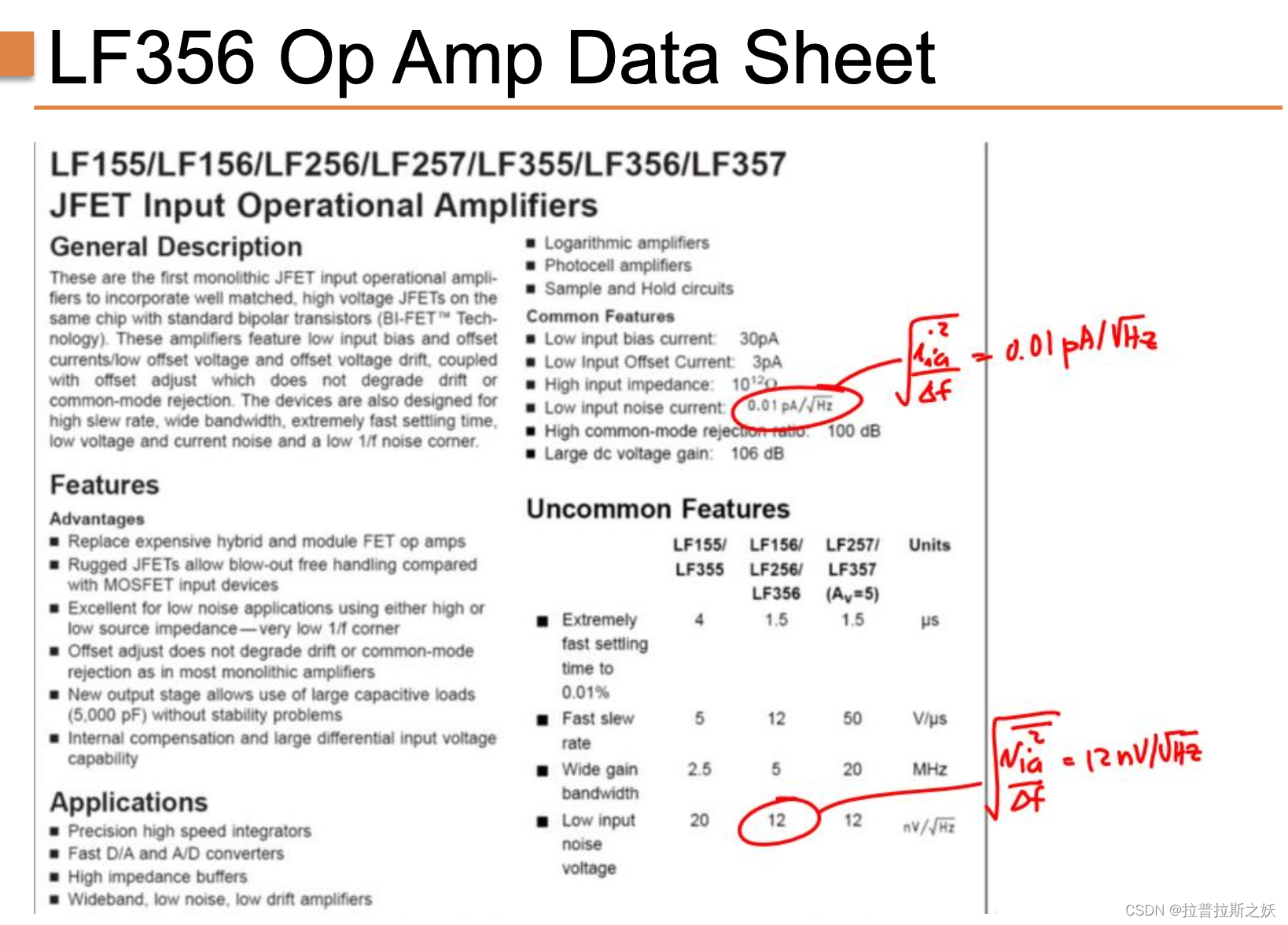
如数据表中所示,LF356的输入噪声电流为0.01 pA/√Hz。这意味着在每赫兹的带宽内,噪声电流的均方根值为0.01 pA。这对于高精度的陀螺仪应用非常重要,因为低噪声电流有助于提高系统的信噪比(SNR)。 -
低输入噪声电压:
LF356的输入噪声电压为12 nV/√Hz。这表明在每赫兹的带宽内,噪声电压的均方根值为12 nV。这同样有助于保持高信噪比,尤其是在需要高精度信号测量的情况下。 -
高输入阻抗:
10^12 Ω的高输入阻抗使得LF356能够有效地处理高阻抗源信号,减少信号源阻抗对放大器性能的影响。
4.4 示例角随机游走(ARW)计算

角随机游走(ARW)是衡量陀螺仪性能的一个重要指标,它描述了陀螺仪在单位时间内由于随机噪声引起的角度漂移。
一、传感元件参数分析
我们首先了解传感元件的具体参数,这些参数决定了系统的基本特性和响应行为。
-
质量 m m m:
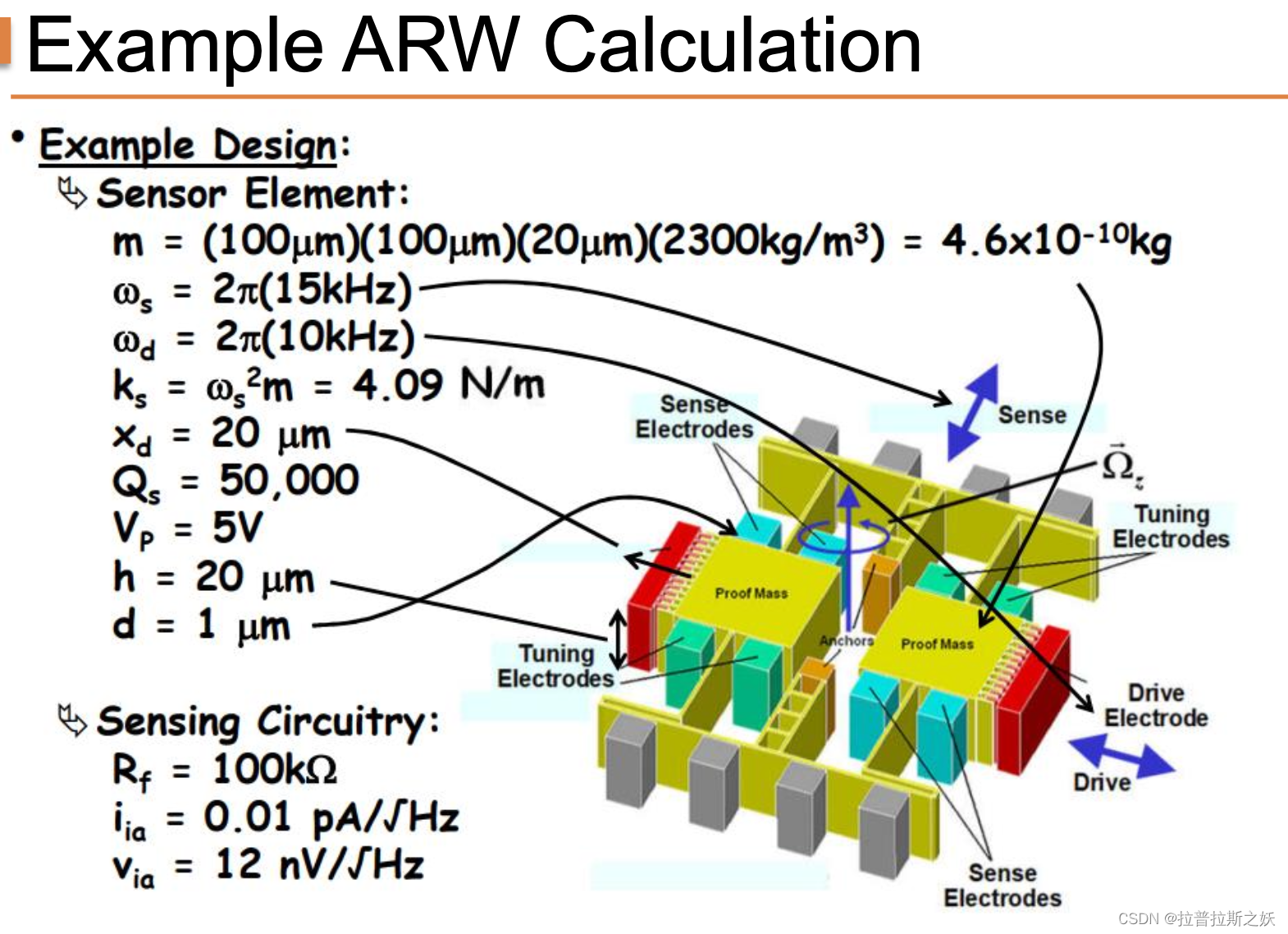
m = ( 100 μ m ) ( 100 μ m ) ( 20 μ m ) ( 2300 kg/m 3 ) = 4.6 × 1 0 − 10 kg m = (100 \, \mu m)(100 \, \mu m)(20 \, \mu m)(2300 \, \text{kg/m}^3) = 4.6 \times 10^{-10} \, \text{kg} m=(100μm)(100μm)(20μm)(2300kg/m3)=4.6×10−10kg
这表示传感元件的有效质量。 -
固有频率 ω s \omega_s ωs:
ω s = 2 π × 15 kHz \omega_s = 2\pi \times 15 \, \text{kHz} ωs=2π×15kHz
这表示传感元件的固有振荡频率。 -
驱动频率 ω d \omega_d ωd:
ω d = 2 π × 10 kHz \omega_d = 2\pi \times 10 \, \text{kHz} ωd=2π×10kHz
这表示外部驱动信号的频率。 -
弹簧常数 k s k_s ks:
k s = ω s 2 m = ( 2 π × 15 kHz ) 2 × 4.6 × 1 0 − 10 kg = 4.09 N/m k_s = \omega_s^2 m = (2\pi \times 15 \, \text{kHz})^2 \times 4.6 \times 10^{-10} \, \text{kg} = 4.09 \, \text{N/m} ks=ωs2m=(2π×15kHz)2×4.6×10−10kg=4.09N/m
弹簧常数表示传感元件的刚度。 -
位移 x d x_d xd:
x d = 20 μ m x_d = 20 \, \mu m xd=20μm
这是传感元件的最大位移。 -
品质因数 Q s Q_s Qs:
Q s = 50 , 000 Q_s = 50,000 Qs=50,000
品质因数表示系统的阻尼特性,数值越高表示阻尼越小。 -
激励电压 V p V_p Vp:
V p = 5 V V_p = 5 \, \text{V} Vp=5V
这是施加在传感元件上的电压。 -
电极几何参数:
h = 20 μ m , d = 1 μ m h = 20 \, \mu m, \quad d = 1 \, \mu m h=20μm,d=1μm
这些参数用于计算电容变化。
二、感测电路参数分析
感测电路决定了信号处理的性能。
-
反馈电阻 R f R_f Rf:
R f = 100 k Ω R_f = 100 \, \text{k}\Omega Rf=100kΩ
反馈电阻用于控制放大器的增益。 -
输入噪声电流 i i a i_{ia} iia:
i i a = 0.01 pA / Hz i_{ia} = 0.01 \, \text{pA}/\sqrt{\text{Hz}} iia=0.01pA/Hz
输入噪声电流表示放大器的电流噪声。 -
输入噪声电压 v i a v_{ia} via:
v i a = 12 nV / Hz v_{ia} = 12 \, \text{nV}/\sqrt{\text{Hz}} via=12nV/Hz
输入噪声电压表示放大器的电压噪声。
三. 输出电流的比例因子计算
-
旋转速率到输出电流的比例因子 A A A:
A = 2 ω d ω s Q s x d η e ∣ H s ( j ω d ) ∣ A = 2 \frac{\omega_d}{\omega_s} Q_s x_d \eta_e \left| H_s(j\omega_d) \right| A=2ωsωdQsxdηe∣Hs(jωd)∣
其中:
∣ H s ( j ω d ) ∣ = ∣ ( j ω d ) ( ω s / Q s ) − ω d 2 + j ω d ω s / Q s + ω s 2 ∣ \left| H_s(j\omega_d) \right| = \left| \frac{(j\omega_d)(\omega_s/Q_s)}{-\omega_d^2 + j\omega_d\omega_s/Q_s + \omega_s^2} \right| ∣Hs(jωd)∣= −ωd2+jωdωs/Qs+ωs2(jωd)(ωs/Qs)
代入具体数值:
∣ H s ( j ω d ) ∣ = ( j × 10 , 000 × ( 2 π × 15 , 000 ) / 50 , 000 ) − ( 2 π × 10 , 000 ) 2 + j ( 2 π × 10 , 000 ) ( 2 π × 15 , 000 ) / 50 , 000 + ( 2 π × 15 , 000 ) 2 \left| H_s(j\omega_d) \right| = \frac{(j \times 10,000 \times (2\pi \times 15,000)/50,000)}{-(2\pi \times 10,000)^2 + j(2\pi \times 10,000)(2\pi \times 15,000)/50,000 + (2\pi \times 15,000)^2} ∣Hs(jωd)∣=−(2π×10,000)2+j(2π×10,000)(2π×15,000)/50,000+(2π×15,000)2(j×10,000×(2π×15,000)/50,000)
经过计算:
∣ H s ( j ω d ) ∣ = 3 , 000 j ( 1.25 × 1 0 8 ) 2 + ( 3 , 000 ) 2 = 0.000024 \left| H_s(j\omega_d) \right| = \frac{3,000j}{\sqrt{(1.25 \times 10^8)^2 + (3,000)^2}} = 0.000024 ∣Hs(jωd)∣=(1.25×108)2+(3,000)23,000j=0.000024
所以:
A = 2 10 , 000 15 , 000 ( 50 , 000 ) ( 20 μ m ) ( 5 ) ( 2000 ϵ 0 ) ( 0.000024 ) = 2.83 × 1 0 − 12 C A = 2 \frac{10,000}{15,000} (50,000) (20 \mu m) (5) (2000 \epsilon_0) (0.000024) = 2.83 \times 10^{-12} \, \text{C} A=215,00010,000(50,000)(20μm)(5)(2000ϵ0)(0.000024)=2.83×10−12C -
电容变化率 ∂ C ∂ x \frac{\partial C}{\partial x} ∂x∂C:
∂ C ∂ x = ϵ 0 h w p d = ϵ 0 ( 20 μ m ) ( 100 μ m ) ( 1 μ m ) = 2000 ϵ 0 \frac{\partial C}{\partial x} = \frac{\epsilon_0 h w_p}{d} = \frac{\epsilon_0 (20 \mu m) (100 \mu m)}{(1 \mu m)} = 2000 \epsilon_0 ∂x∂C=dϵ0hwp=(1μm)ϵ0(20μm)(100μm)=2000ϵ0
这里假设电极覆盖整个侧壁。
四. 噪声计算
-
等效输入噪声电流 i e q T O T i_{eqTOT} ieqTOT:
i e q T O T 2 ‾ = 4 k T R x ∣ H s ( j ω d ) ∣ 2 + 4 k T R f + i i a 2 ‾ Δ f + v i a 2 ‾ Δ f ( 1 R f ) 2 \overline{i_{eqTOT}^2} = \frac{4 k T}{R_x} \left| H_s(j\omega_d) \right|^2 + \frac{4 k T}{R_f} + \frac{\overline{i_{ia}^2}}{\Delta f} + \frac{\overline{v_{ia}^2}}{\Delta f} \left( \frac{1}{R_f} \right)^2 ieqTOT2=Rx4kT∣Hs(jωd)∣2+Rf4kT+Δfiia2+Δfvia2(Rf1)2 -
计算 R x R_x Rx:
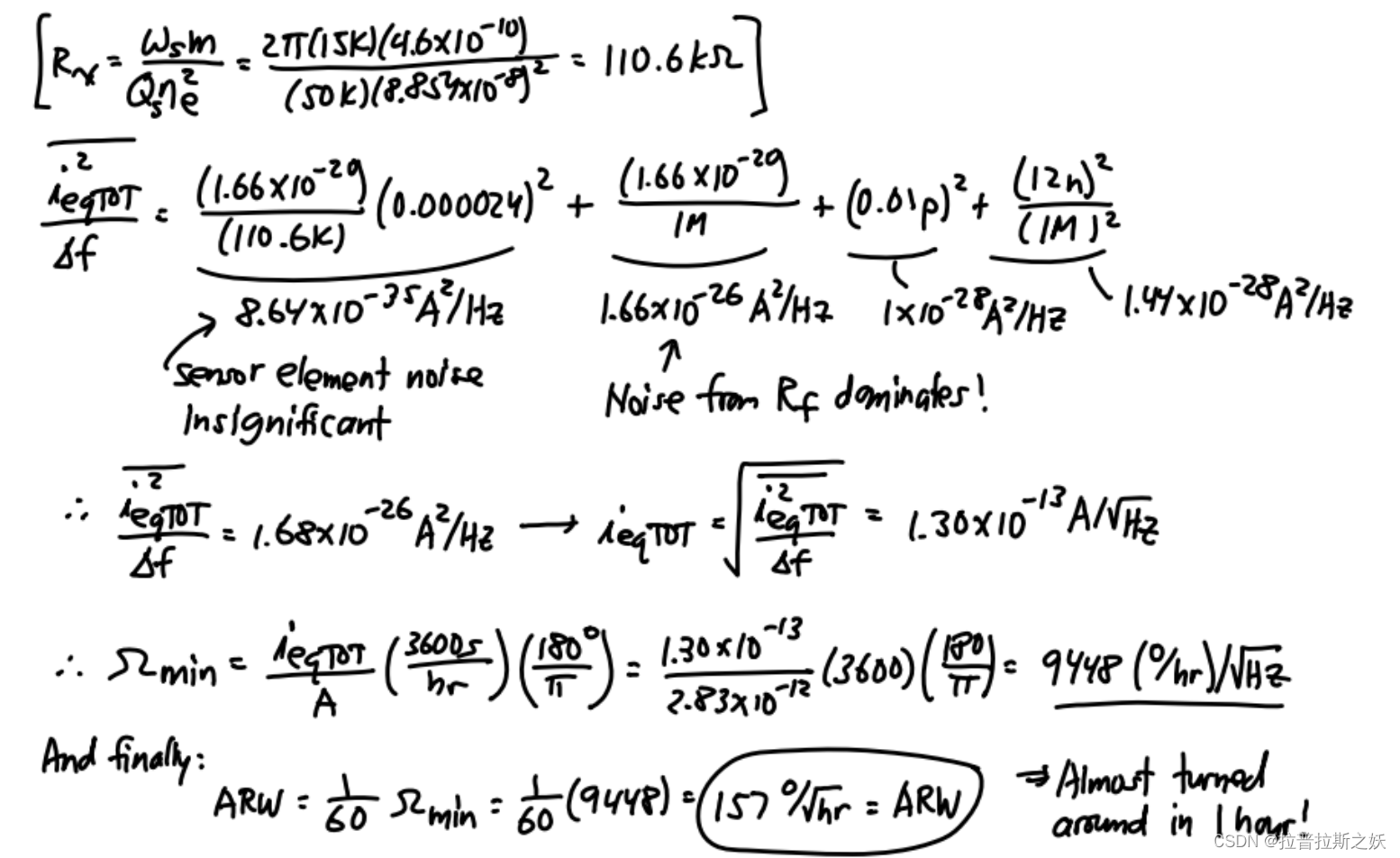
R x = ω s m Q s η e 2 = 2 π ( 15 , 000 ) ( 4.6 × 1 0 − 10 ) ( 50 , 000 ) ( 2000 ϵ 0 ) 2 = 110.6 k Ω R_x = \frac{\omega_s m}{Q_s \eta_e^2} = \frac{2\pi (15,000) (4.6 \times 10^{-10})}{(50,000)(2000 \epsilon_0)^2} = 110.6 \text{k}\Omega Rx=Qsηe2ωsm=(50,000)(2000ϵ0)22π(15,000)(4.6×10−10)=110.6kΩ -
计算各个噪声分量:
i e q T O T 2 ‾ = 1.66 × 1 0 − 20 110 , 600 ( 0.000024 ) 2 + 1.66 × 1 0 − 26 1 , 000 , 000 + ( 0.01 pA ) 2 + ( 12 nV 1 , 000 , 000 ) 2 \overline{i_{eqTOT}^2} = \frac{1.66 \times 10^{-20}}{110,600} (0.000024)^2 + \frac{1.66 \times 10^{-26}}{1,000,000} + (0.01 \text{pA})^2 + \left( \frac{12 \text{nV}}{1,000,000} \right)^2 ieqTOT2=110,6001.66×10−20(0.000024)2+1,000,0001.66×10−26+(0.01pA)2+(1,000,00012nV)2
具体计算得到:
i e q T O T 2 ‾ = 1.68 × 1 0 − 26 A 2 / Hz \overline{i_{eqTOT}^2} = 1.68 \times 10^{-26} \text{A}^2/\text{Hz} ieqTOT2=1.68×10−26A2/Hz -
最小可检测信号 Ω min \Omega_{\text{min}} Ωmin:
Ω min = i e q T O T A ( 3600 s/hr 180 / π ) = 1.30 × 1 0 − 13 A / Hz 2.83 × 1 0 − 12 C ( 3600 ) ( 180 π ) = 9448 % / hr \Omega_{\text{min}} = \frac{i_{eqTOT}}{A} \left( \frac{3600 \text{s/hr}}{180/\pi} \right) = \frac{1.30 \times 10^{-13} \text{A}/\sqrt{\text{Hz}}}{2.83 \times 10^{-12} \text{C}} \left( 3600 \right) \left( \frac{180}{\pi} \right) = 9448 \%/\sqrt{\text{hr}} Ωmin=AieqTOT(180/π3600s/hr)=2.83×10−12C1.30×10−13A/Hz(3600)(π180)=9448%/hr -
计算ARW:
ARW = 1 60 Ω min = 157 % / hr \text{ARW} = \frac{1}{60} \Omega_{\text{min}} = 157 \%/\sqrt{\text{hr}} ARW=601Ωmin=157%/hr
4.5 当 ω d = ω s \omega_d = \omega_s ωd=ωs 的角随机游走(ARW)计算详解
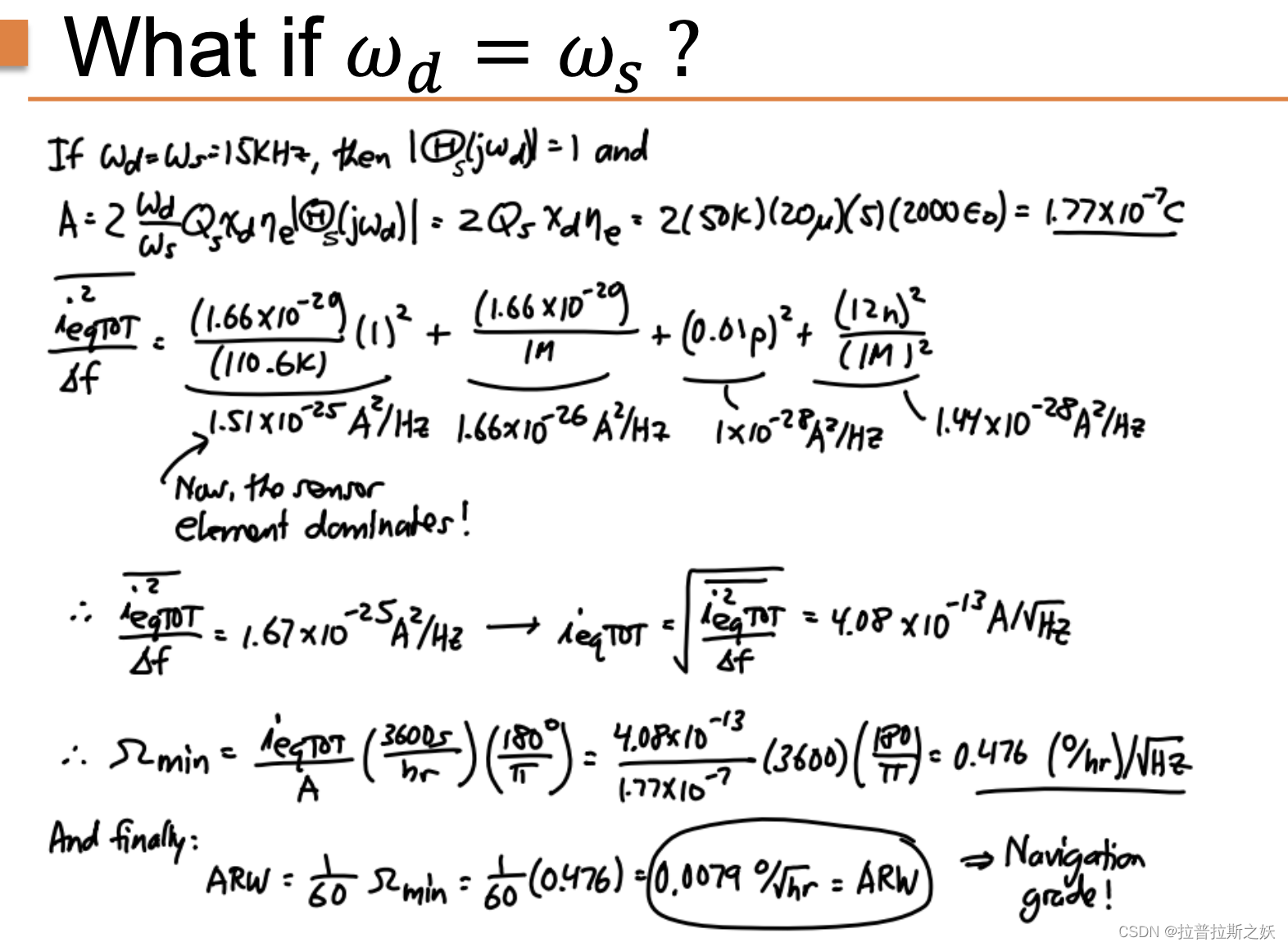
在这个特定情况下,我们假设驱动频率 ω d \omega_d ωd 等于固有频率 ω s \omega_s ωs,即 ω d = ω s \omega_d = \omega_s ωd=ωs。这种情况下,系统的响应特性将发生显著变化,我们需要重新计算系统的比例因子和噪声影响。
一、假设条件
假设 ω d = ω s = 15 kHz \omega_d = \omega_s = 15 \text{kHz} ωd=ωs=15kHz,因此频率响应函数的模值 ∣ H s ( j ω d ) ∣ |H_s(j\omega_d)| ∣Hs(jωd)∣ 将等于1:
∣ H s ( j ω d ) ∣ = 1 |H_s(j\omega_d)| = 1 ∣Hs(jωd)∣=1
二、比例因子 A A A 的计算
在 ω d = ω s \omega_d = \omega_s ωd=ωs 的情况下,比例因子 A A A 的计算简化为:
A = 2 Q s x d η e ∣ H s ( j ω d ) ∣ A = 2 Q_s x_d \eta_e |H_s(j\omega_d)| A=2Qsxdηe∣Hs(jωd)∣
由于 ∣ H s ( j ω d ) ∣ = 1 |H_s(j\omega_d)| = 1 ∣Hs(jωd)∣=1,我们有:
A = 2 Q s x d η e = 2 × 50 , 000 × 20 μ m × 5 × 2000 ϵ 0 = 1.77 × 1 0 − 7 C A = 2 Q_s x_d \eta_e = 2 \times 50,000 \times 20 \mu m \times 5 \times 2000 \epsilon_0 = 1.77 \times 10^{-7} \text{C} A=2Qsxdηe=2×50,000×20μm×5×2000ϵ0=1.77×10−7C
三、噪声计算
-
等效输入噪声电流 i e q T O T i_{eqTOT} ieqTOT 的各个分量计算如下:
-
传感器元件噪声:
4 k T R x ∣ H s ( j ω d ) ∣ 2 = 4 × 1.38 × 1 0 − 23 × 300 110.6 × 1 0 3 = 1.51 × 1 0 − 25 A 2 / Hz \frac{4 k T}{R_x} |H_s(j\omega_d)|^2 = \frac{4 \times 1.38 \times 10^{-23} \times 300}{110.6 \times 10^3} = 1.51 \times 10^{-25} \text{A}^2/\text{Hz} Rx4kT∣Hs(jωd)∣2=110.6×1034×1.38×10−23×300=1.51×10−25A2/Hz -
反馈电阻噪声:
4 k T R f = 4 × 1.38 × 1 0 − 23 × 300 100 × 1 0 3 = 1.66 × 1 0 − 26 A 2 / Hz \frac{4 k T}{R_f} = \frac{4 \times 1.38 \times 10^{-23} \times 300}{100 \times 10^3} = 1.66 \times 10^{-26} \text{A}^2/\text{Hz} Rf4kT=100×1034×1.38×10−23×300=1.66×10−26A2/Hz -
输入电流噪声:
i i a 2 Δ f = ( 0.01 pA ) 2 = 1 × 1 0 − 28 A 2 / Hz \frac{i_{ia}^2}{\Delta f} = (0.01 \text{pA})^2 = 1 \times 10^{-28} \text{A}^2/\text{Hz} Δfiia2=(0.01pA)2=1×10−28A2/Hz -
输入电压噪声:
v i a 2 Δ f ( 1 R f ) 2 = ( 12 nV 1 M Ω ) 2 = 1.44 × 1 0 − 28 A 2 / Hz \frac{v_{ia}^2}{\Delta f} \left( \frac{1}{R_f} \right)^2 = \left( \frac{12 \text{nV}}{1 \text{M}\Omega} \right)^2 = 1.44 \times 10^{-28} \text{A}^2/\text{Hz} Δfvia2(Rf1)2=(1MΩ12nV)2=1.44×10−28A2/Hz
-
-
总的等效输入噪声电流:
i e q T O T 2 ‾ = 1.51 × 1 0 − 25 + 1.66 × 1 0 − 26 + 1 × 1 0 − 28 + 1.44 × 1 0 − 28 = 1.67 × 1 0 − 25 A 2 / Hz \overline{i_{eqTOT}^2} = 1.51 \times 10^{-25} + 1.66 \times 10^{-26} + 1 \times 10^{-28} + 1.44 \times 10^{-28} = 1.67 \times 10^{-25} \text{A}^2/\text{Hz} ieqTOT2=1.51×10−25+1.66×10−26+1×10−28+1.44×10−28=1.67×10−25A2/Hz -
等效输入噪声电流均方根值:
i e q T O T = i e q T O T 2 ‾ = 1.67 × 1 0 − 25 = 4.08 × 1 0 − 13 A / Hz i_{eqTOT} = \sqrt{\overline{i_{eqTOT}^2}} = \sqrt{1.67 \times 10^{-25}} = 4.08 \times 10^{-13} \text{A}/\sqrt{\text{Hz}} ieqTOT=ieqTOT2=1.67×10−25=4.08×10−13A/Hz
四、最小可检测信号 Ω min \Omega_{\text{min}} Ωmin 的计算
- 最小可检测信号:
Ω min = i e q T O T A ( 3600 s/hr 180 / π ) = 4.08 × 1 0 − 13 A / Hz 1.77 × 1 0 − 7 C ( 3600 ) ( 180 π ) \Omega_{\text{min}} = \frac{i_{eqTOT}}{A} \left( \frac{3600 \text{s/hr}}{180/\pi} \right) = \frac{4.08 \times 10^{-13} \text{A}/\sqrt{\text{Hz}}}{1.77 \times 10^{-7} \text{C}} \left( 3600 \right) \left( \frac{180}{\pi} \right) Ωmin=AieqTOT(180/π3600s/hr)=1.77×10−7C4.08×10−13A/Hz(3600)(π180)
计算得到:
Ω min = 0.476 % / hr \Omega_{\text{min}} = 0.476 \%/\sqrt{\text{hr}} Ωmin=0.476%/hr
五、角随机游走(ARW)计算
- ARW:
ARW = 1 60 Ω min = 1 60 × 0.476 % / hr = 0.0079 % / hr \text{ARW} = \frac{1}{60} \Omega_{\text{min}} = \frac{1}{60} \times 0.476 \%/\sqrt{\text{hr}} = 0.0079 \%/\sqrt{\text{hr}} ARW=601Ωmin=601×0.476%/hr=0.0079%/hr
通过上述详细的步骤,我们可以看到在 ω d = ω s \omega_d = \omega_s ωd=ωs 的情况下,系统的最小可检测信号和角随机游走(ARW)显著降低,这意味着系统的精度和稳定性显著提高。这种情况下,传感器元件噪声占主导地位,反馈电阻噪声的影响被减小,从而使得整体噪声水平降低。这样的计算和分析有助于在实际应用中优化系统设计,提升系统性能。
相关文章:
MEMS:Lecture 17 Noise MDS
讲义 Minimum Detectable Signal (MDS) Minimum Detectable Signal(最小可检测信号)是指当信号-噪声比(Signal-to-Noise Ratio, SNR)等于1时的输入信号水平。简单来说,MDS 是一个系统能够分辨出信号存在的最低输入信号…...

Windows运维:找到指定端口的服务
运维过windows的或多或少都遇到过需要找到一个端口对应的服务,或者是因为端口占用,或者是想看下对应的服务是哪个,那么如何操作呢?看看本文吧。 1、按照端口找到进程ID 例如想找8000端口的进程ID netstat -ano | findstr :8000 2…...
Linux文件系统讲解!
一、Linux文件系统历史 1、在早期的时候Linux各种不同发行版拥有自己各自自定义的文件系统层级结构。 2、当我用Red hat转向玩Debian时,我进入/etc我都是懵的。 3、后来Linux社区做了一个标准、FHS(文件系统标准层次结构)。来帮助Linux系统的…...

mysql集群,两主两从,使用mysql-proxy实现读写分离
主从复制 一、IP规划 服务器IP备注master1192.168.100.131master2的从master2192.168.100.132master1的从slave1192.168.100.134slave1的从slave2192.168.100.135slave2的从mysql-proxy192.168.100.137 二、具体配置 1.master1 配置ip:192.168.100.131 …...
Linux文本处理三剑客+正则表达式
Linux文本处理常用的3个命令,脚本或者文本处理任务中会用到。这里做个整理。 三者的功能都是处理文本,但侧重点各不相同,grep更适合单纯的查找或匹配文本,sed更适合编辑匹配到的文本,awk更适合格式化文本,对…...
Linux启动KKfileview文件在线浏览时报错:启动office组件失败,请检查office组件是否可用
目录 1、导论 2、报错信息 3、问题分析 4、解决方法 4.1、下载 4.2、安装步骤 1、导论 今天进行项目部署时,遇到了一个问题。在启动kkfileview时,出现了报错异常: 2024-06-09 06:36:44.765 ERROR 1 --- [ main] cn.keking.service.Of…...

React <> </>的用法
React <> </>的用法 介绍为什么使用 <>?例子解释 关于顶级元素总结 介绍 在 React 中,使用 <> 表示一个空标签或片段(Fragment),这是一个简洁的方式来包裹一…...
is not null 、StringUtils.isNotEmpty和StringUtils.isNotBlank之间的区别?
这三者主要是针对对象是否为空、是否为空串和是否为空白字符串有不同的功能。 is not null 只是说明该对象不为空,没有考虑是否为空串和空白字符串。 StringUtils.isNotEmpty检查字符串是否不为 null且长度大于零,不考虑字符串中的空白字符。 StringU…...

Git使用-gitlab上面的项目如何整到本地的idea中
场景 一般我们在开发项目或者接手某个项目时,基本都要接触Git,比如上传项目代码,下载同事给你的交接代码等等。 这是一个基本功,小小整理一下日常操作中的使用。 第一步:在 GitLab 上找到你要克隆的项目,复…...

活体检验API在Java、Python、PHP中的使用教程
活体检验API是一种基于生物特征的身份验证技术,通过分析和识别用户的生物信息来确认其身份。这种技术广泛应用于各种领域,如金融、安全、社交媒体等,以提高身份验证的安全性和准确性。以下是描述”活体检验API”背景的一些关键点:…...
智能计算系统-概述
1、人工智能技术分层 2、人工智能方向人才培养 3、课程体系的建议 4、智能系统课程对学生的价值 5、智能计算系统对老师的价值 6、什么是智能计算系统 7、智能计算系统的形态 8、智能计算系统具有重大价值 9、智能计算系统的三大困难 10、开创深度学习处理器方向 11、寒武纪的国…...
SM5101 SOP-8 充电+触摸+发执丝控制多合一IC触摸打火机专用IC
SM5101 SOP-8 2.7V 涓流充电 具电池过充过放 触摸控制 发热丝电流控制多功能为一体专用芯片 昱灿-海川 SM5101 SOP-8 充电触摸发执丝控制多合一IC触摸打火机方案 !!! 简介: SM5101是一款针对电子点烟器的专用芯片,具…...

Mysql-题目02
下面列出的( DBMS )是数据库管理系统的简称。 A、DB(数据库) B、DBA C、DBMS(数据库管理系统) D、DBS(数据库系统) 以下选项中,( 概念模式 )面向数据库设计人员&…...
Swift开发——循环执行方式
本文将介绍 Swift 语言的循环执行方式 01、循环执行方式 在Swift语言中,主要有两种循环执行控制方式: for-in结构和while结构。while结构又细分为当型while结构和直到型while结构,后者称为repeat-while结构。下面首先介绍for-in结构。 循环控制方式for-in结构可用于区间中的…...
Navicat和SQLynx产品功能比较一(整体比较)
Navicat和SQLynx都是数据库管理工具,在过去的二十年中,国内用户主要是使用Navicat偏多,一般是个人简单开发需要,数据量一般不大,开发相对简单。SQLynx是最近几年的数据库管理工具,Web开发,桌面版…...

pip 配置缓存路径
在windows操作平台,默认情况,pip下使用的系统目录 C:\Users\用名名称\AppData\Local\pip C盘是系统盘,如果常常使用pip安装会占用大量的空间很快就满,这时候就有必要变更一下缓存保存路径了。 pip 配置缓存路径: Win…...
 - Scala入门)
大数据开发语言Scala(一) - Scala入门
引言 在当今的大数据时代,数据量和数据处理的复杂性不断增加,传统的编程语言已经难以满足需求。Scala作为一门新兴的编程语言,以其简洁、强大和高效的特性,迅速成为大数据开发的热门选择。本文将详细介绍Scala语言的基础知识&…...
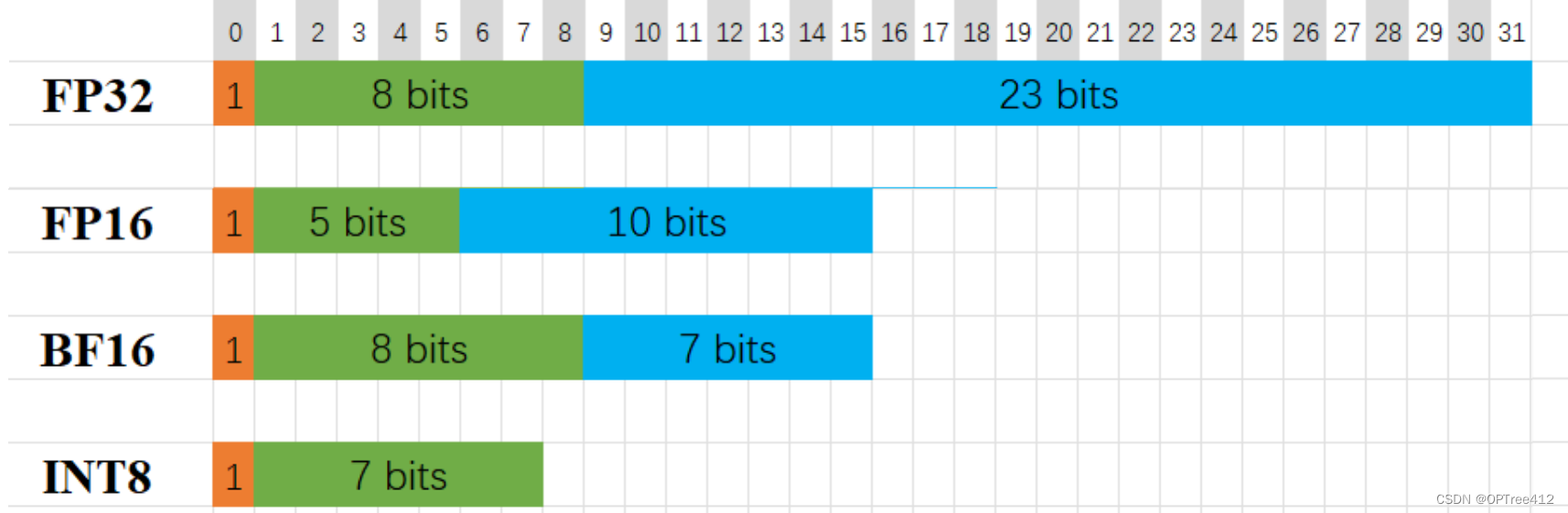
大模型中的计算精度——FP32, FP16, bfp16之类的都是什么???
大模型中的计算精度——FP32, FP16, bfp16之类的都是什么??? 这些精度是用来干嘛的??混合精度 mixed precision training什么是混合精度?怎么转换呢? 为什么大语言模型通常使用FP32精度训练量化…...

在矩池云使用GLM-4的详细指南(无感连GitHubHuggingFace)
GLM-4-9B 是智谱 AI 推出的最新一代预训练模型 GLM-4 系列中的开源版本,在多项测试中表现出超越已有同等规模开源模型的性能,它能兼顾多轮对话、网页浏览、代码执行、多语言、长文本推理等多种功能,性能更加强大。其多模态语言模型GLM-4V-9B在…...

大模型日报2024-06-15
大模型日报 2024-06-15 大模型资讯 新技术提升大型语言模型推理能力 摘要: 一种新技术使得像GPT-4这样的大型语言模型能够通过编写Python代码,更准确地解决数值或符号推理任务。 大型语言模型革命性提升蛋白质序列理解 摘要: 研究人员将蛋白质序列与自然语言进行类比…...

基于Docker Compose部署Java微服务项目
一. 创建根项目 根项目(父项目)主要用于依赖管理 一些需要注意的点: 打包方式需要为 pom<modules>里需要注册子模块不要引入maven的打包插件,否则打包时会出问题 <?xml version"1.0" encoding"UTF-8…...

Java面试专项一-准备篇
一、企业简历筛选规则 一般企业的简历筛选流程:首先由HR先筛选一部分简历后,在将简历给到对应的项目负责人后再进行下一步的操作。 HR如何筛选简历 例如:Boss直聘(招聘方平台) 直接按照条件进行筛选 例如:…...
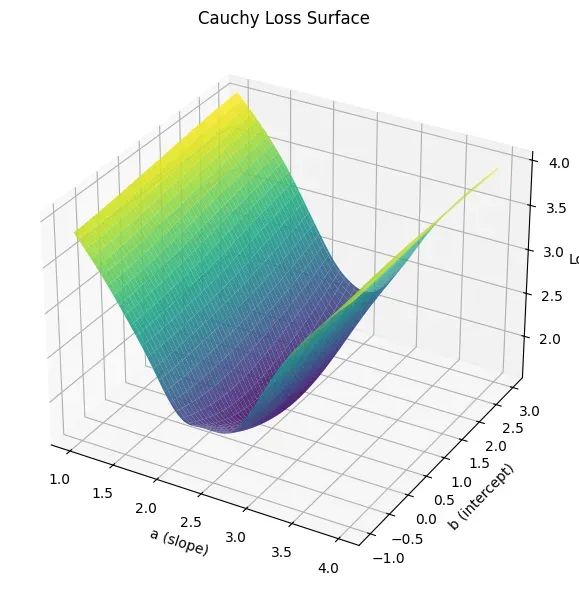
让回归模型不再被异常值“带跑偏“,MSE和Cauchy损失函数在噪声数据环境下的实战对比
在机器学习的回归分析中,损失函数的选择对模型性能具有决定性影响。均方误差(MSE)作为经典的损失函数,在处理干净数据时表现优异,但在面对包含异常值的噪声数据时,其对大误差的二次惩罚机制往往导致模型参数…...
DingDing机器人群消息推送
文章目录 1 新建机器人2 API文档说明3 代码编写 1 新建机器人 点击群设置 下滑到群管理的机器人,点击进入 添加机器人 选择自定义Webhook服务 点击添加 设置安全设置,详见说明文档 成功后,记录Webhook 2 API文档说明 点击设置说明 查看自…...

Web中间件--tomcat学习
Web中间件–tomcat Java虚拟机详解 什么是JAVA虚拟机 Java虚拟机是一个抽象的计算机,它可以执行Java字节码。Java虚拟机是Java平台的一部分,Java平台由Java语言、Java API和Java虚拟机组成。Java虚拟机的主要作用是将Java字节码转换为机器代码&#x…...

比较数据迁移后MySQL数据库和OceanBase数据仓库中的表
设计一个MySQL数据库和OceanBase数据仓库的表数据比较的详细程序流程,两张表是相同的结构,都有整型主键id字段,需要每次从数据库分批取得2000条数据,用于比较,比较操作的同时可以再取2000条数据,等上一次比较完成之后,开始比较,直到比较完所有的数据。比较操作需要比较…...

数学建模-滑翔伞伞翼面积的设计,运动状态计算和优化 !
我们考虑滑翔伞的伞翼面积设计问题以及运动状态描述。滑翔伞的性能主要取决于伞翼面积、气动特性以及飞行员的重量。我们的目标是建立数学模型来描述滑翔伞的运动状态,并优化伞翼面积的设计。 一、问题分析 滑翔伞在飞行过程中受到重力、升力和阻力的作用。升力和阻力与伞翼面…...

Python 训练营打卡 Day 47
注意力热力图可视化 在day 46代码的基础上,对比不同卷积层热力图可视化的结果 import torch import torch.nn as nn import torch.optim as optim from torchvision import datasets, transforms from torch.utils.data import DataLoader import matplotlib.pypl…...

WebRTC调研
WebRTC是什么,为什么,如何使用 WebRTC有什么优势 WebRTC Architecture Amazon KVS WebRTC 其它厂商WebRTC 海康门禁WebRTC 海康门禁其他界面整理 威视通WebRTC 局域网 Google浏览器 Microsoft Edge 公网 RTSP RTMP NVR ONVIF SIP SRT WebRTC协…...

基于Python的气象数据分析及可视化研究
目录 一.🦁前言二.🦁开源代码与组件使用情况说明三.🦁核心功能1. ✅算法设计2. ✅PyEcharts库3. ✅Flask框架4. ✅爬虫5. ✅部署项目 四.🦁演示效果1. 管理员模块1.1 用户管理 2. 用户模块2.1 登录系统2.2 查看实时数据2.3 查看天…...