机器人建模、运动学与动力学仿真分析(importrobot,loadrobot,smimport)
机器人建模、运动学与动力学仿真分析是机器人设计和开发过程中的关键步骤。
一、机器人建模
机器人建模是描述机器人物理结构和运动特性的过程。其中,URDF(Unified Robot Description Format)是一种常用的机器人模型描述方法。通过URDF,可以定义机器人的连杆(links)、关节(joints)、惯性(inertia)、视觉和碰撞属性等。
- importrobot
- 功能:
importrobot函数用于从URDF(Unified Robot Description Format)文件中导入机器人模型。URDF是一种XML格式,用于描述机器人的关节、连杆、碰撞和视觉属性等。 - 使用方式:通过向
importrobot函数提供URDF文件的路径,可以创建一个rigidBodyTree对象,该对象包含了机器人的所有物理特性和运动学特性。 - 示例代码:
robot = importrobot('myRobot.urdf');
- 功能:
- loadrobot
- 功能:
loadrobot函数用于加载预定义的机器人模型。这些模型可能是MATLAB Robotics System Toolbox中已经内置的,或者是用户通过其他方式定义的。 - 使用方式:通过向
loadrobot函数提供一个字符串参数(表示机器人模型的名称),可以直接加载该模型为一个rigidBodyTree对象。 - 示例代码:
robot = loadrobot('universalUR10');// 加载Universal Robots UR10机器人模型 - 特点:
loadrobot函数提供了一种快速访问常见机器人模型的方法,无需手动编写或导入URDF文件。
- 功能:
- smimport
- 功能:
smimport函数通常用于导入CAD(计算机辅助设计)文件或其他3D模型文件到Simscape Multibody环境中。Simscape Multibody是MATLAB的一个模块,用于构建和仿真多体系统(如机械系统)。 - 使用方式:
smimport函数支持多种CAD文件格式(如STL、STEP、IGES等),允许用户将CAD模型导入Simscape Multibody环境中进行进一步的处理和仿真。 - 特点:虽然
smimport函数可以用于导入机器人模型,但它通常更多地用于导入更一般的3D模型。与importrobot和loadrobot不同,smimport不直接创建rigidBodyTree对象,而是将模型导入到Simscape Multibody环境中,以便进行更高级的动力学和运动学仿真。
- 功能:
importrobot:从URDF文件中导入机器人模型,创建rigidBodyTree对象。loadrobot:快速加载预定义的机器人模型为rigidBodyTree对象。smimport:将CAD或其他3D模型文件导入Simscape Multibody环境,通常不直接创建rigidBodyTree对象,而是用于更复杂的动力学和运动学仿真。
在MATLAB中,可以使用importrobot函数来读取URDF文件并创建机器人模型。
在MATLAB中,使用loadrobot函数加载机器人模型并将其表示为rigidBodyTree对象后,您可以进一步将这个模型转换为Simscape Multibody模型,以便在Simulink环境中进行更复杂的动力学仿真。
robot = importrobot('universalUR5e.urdf');
show(robot)robot = loadrobot("universalUR5e",DataFormat="column");
robotSM = smimport(robot,ModelName="ManipulatorTrajectoryPlanning_Subsystem");
model = get_param(robotSM,"Name");% 导入UR5e机器人模型robot = loadrobot("universalUR5e", "DataFormat", "row", "Gravity", [0 0 -9.81]);show (robot)% DH参数a = [0.00000, -0.42500, -0.39225, 0.00000, 0.00000, 0.0000];d = [0.089159, 0.00000, 0.00000, 0.10915, 0.09465, 0.0823];alpha = [1.570796327, 0, 0, 1.570796327, -1.570796327, 0];q_home_offset = [0, -1.570796327, 0, -1.570796327, 0, 0];joint_direction = [-1, -1, 1, 1, 1, 1];mass = [3.7000, 8.3930, 2.2750, 1.2190, 1.2190, 0.1879];center_of_mass = [[0, -0.02561, 0.00193]; [0.2125, 0, 0.11336]; [0.11993, 0.0, 0.0265]; [0, -0.0018, 0.01634]; [0, 0.0018, 0.01634]; [0, 0, -0.001159]];
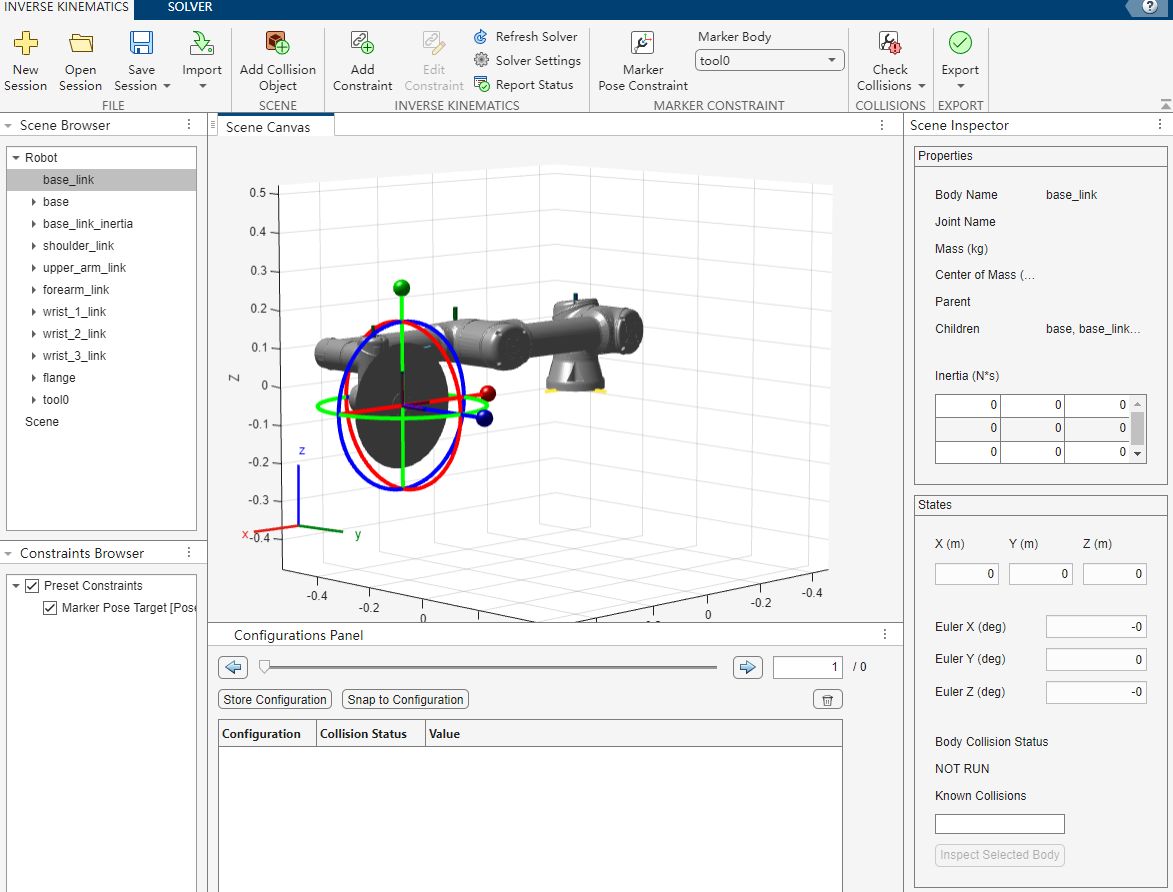

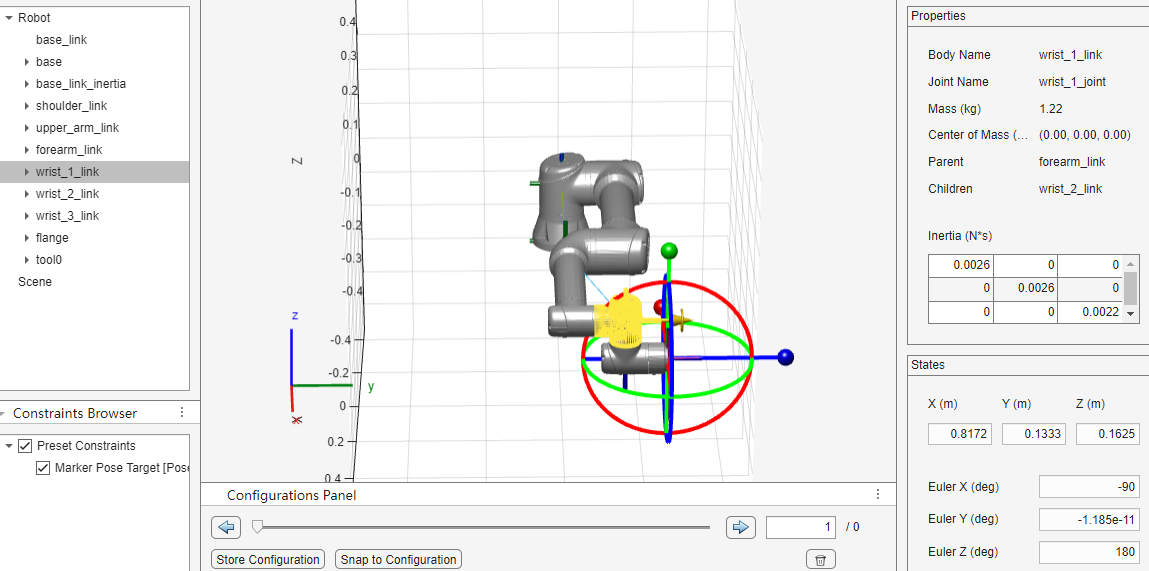
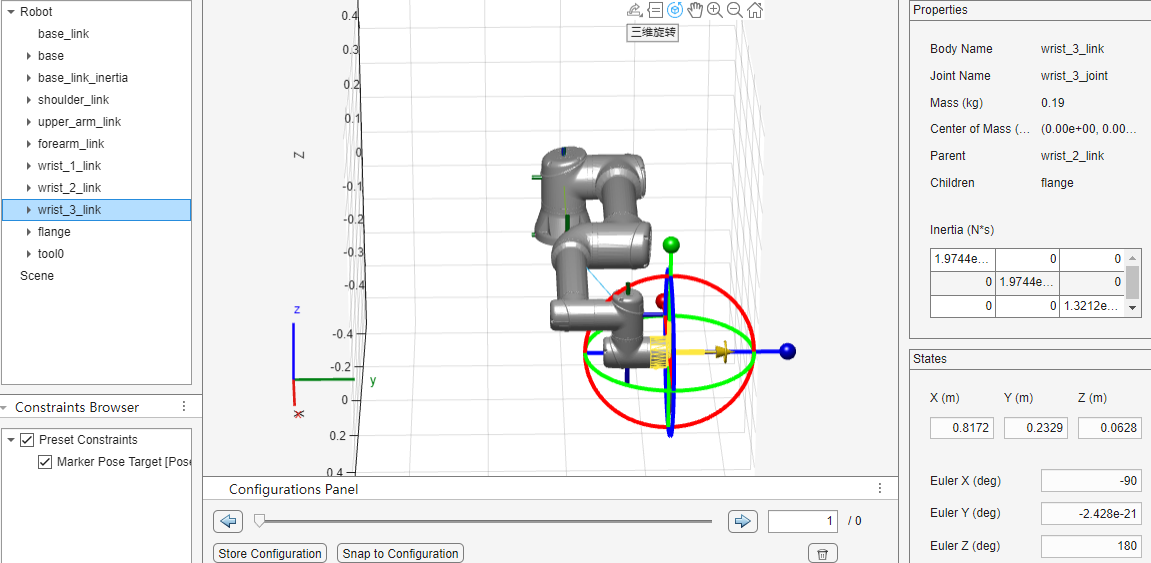
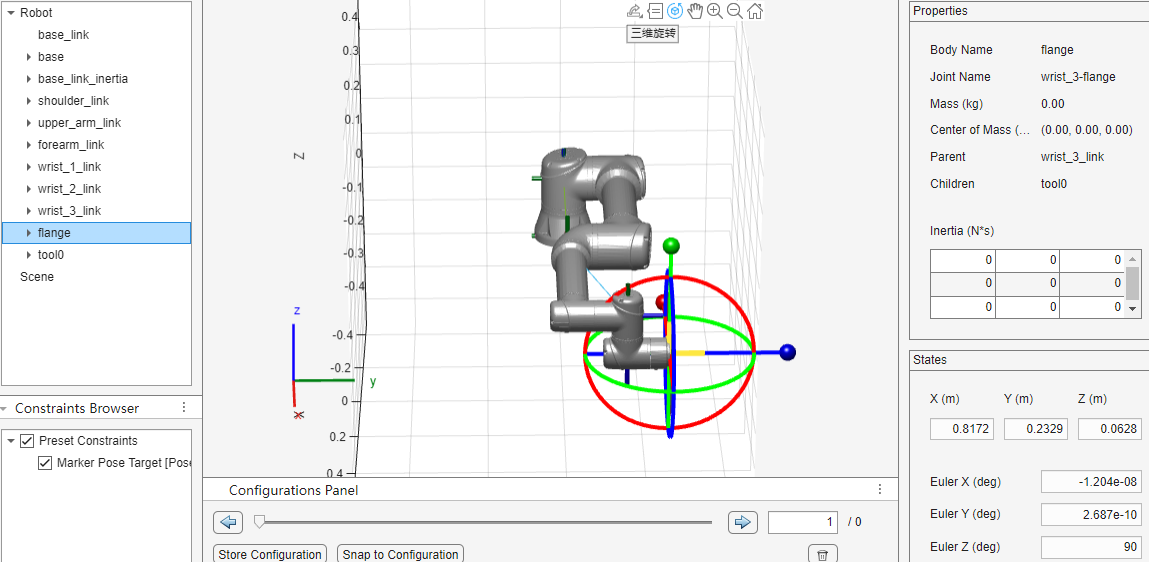
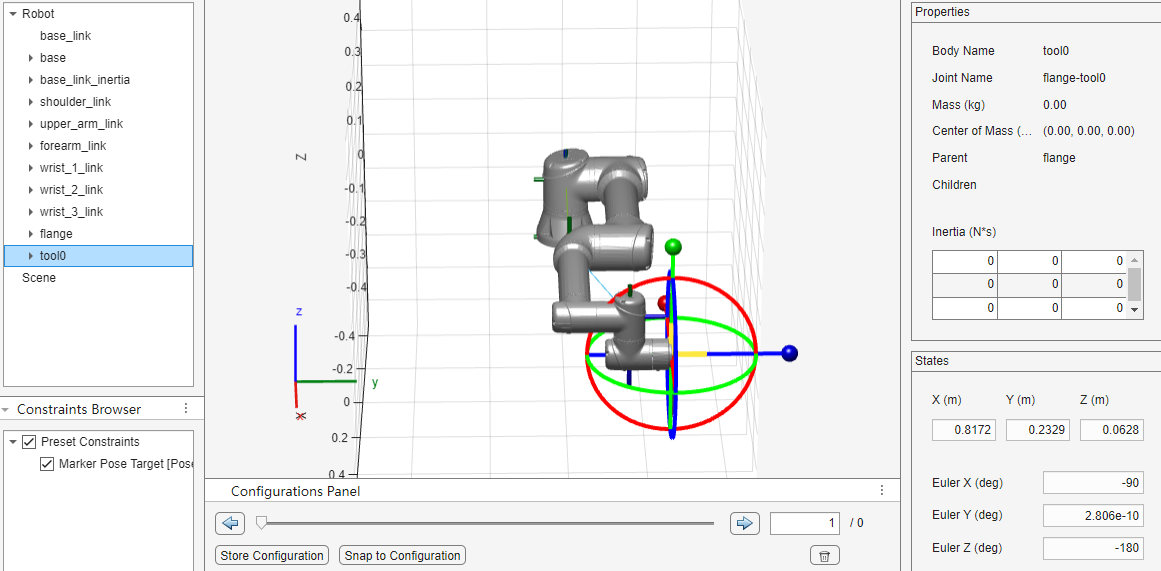
下面是机器人的六个连杆:
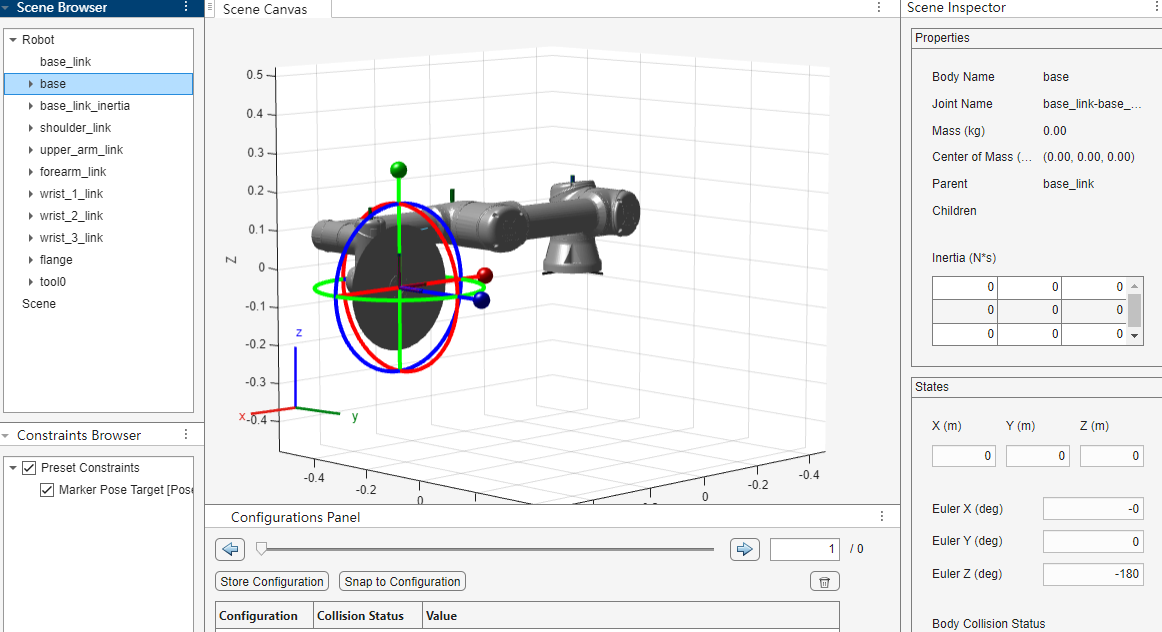
- 基座关节(Base Joint)与连杆:
- 通常命名为“基座”或“Base Link”,它是机器人的起点,支撑着整个机械臂结构。
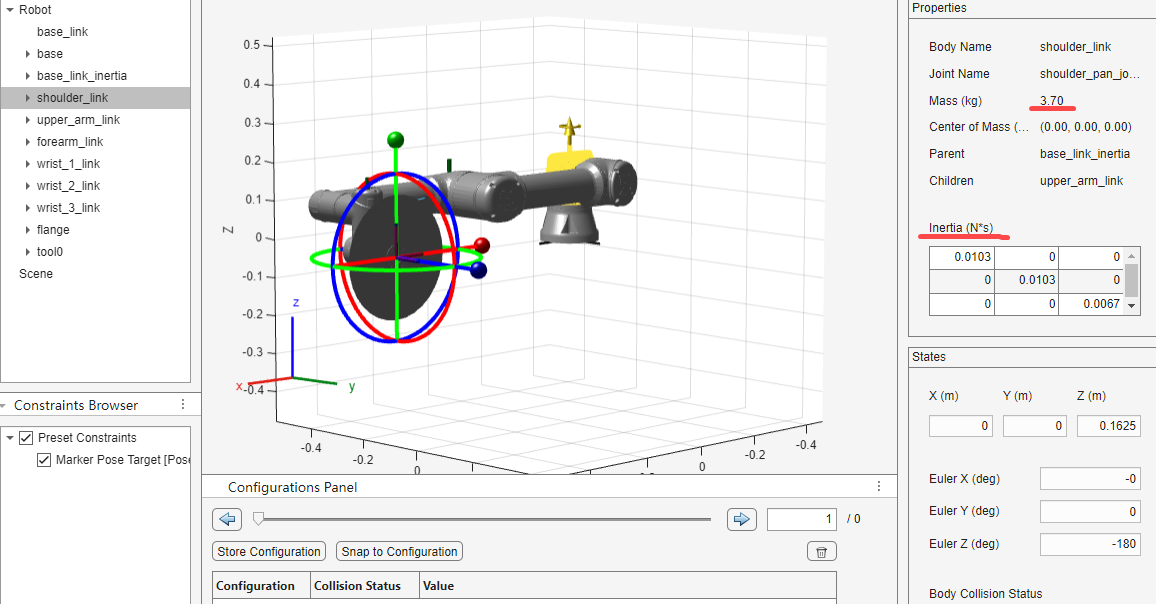
- 肩部关节(Shoulder Joint)与连杆:
- 肩部关节允许机器人手臂在水平面内进行旋转。
- 对应的连杆可以称为“肩部连杆”或“Shoulder Link”,它连接着基座和肘部关节。
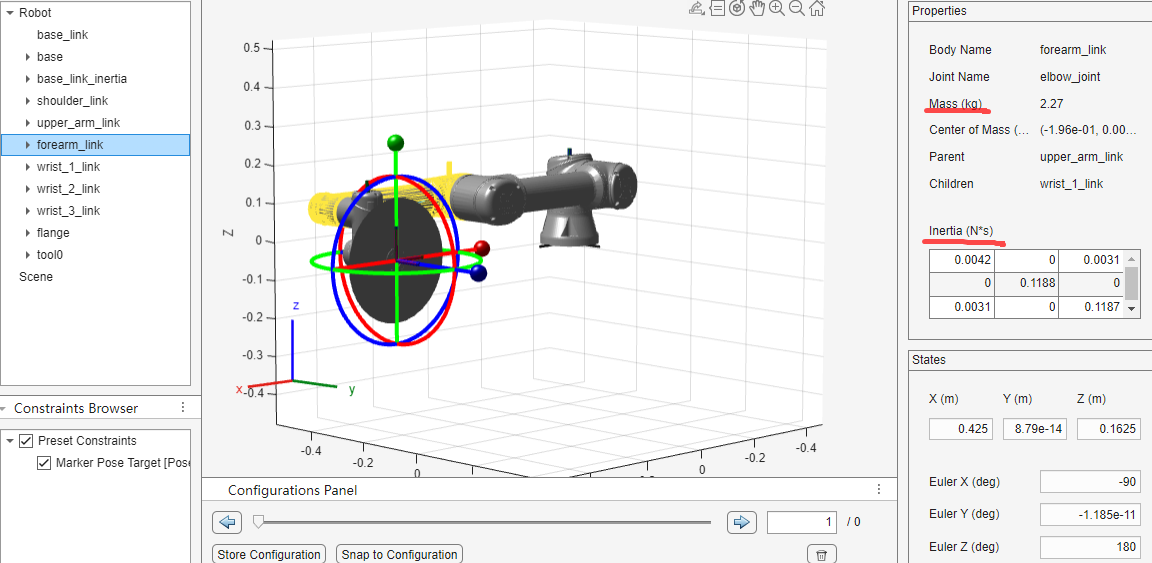
- 肘部关节(Elbow Joint)与连杆:
- 肘部关节使机器人手臂能够在垂直平面内弯曲或伸展。
- 对应的连杆称为“肘部连杆”或“Elbow Link”,它连接着肩部连杆和腕部关节。
- 腕部关节(Wrist Joints)与连杆:
- UR5e机器人的腕部通常包含三个关节,分别负责俯仰(Pitch)、偏转(Yaw)和滚动(Roll)运动。
- 这三个关节对应的连杆可以分别命名为“俯仰连杆”、“偏转连杆”和“滚动连杆”,或者简化为“Wrist Pitch Link”、“Wrist Yaw Link”和“Wrist Roll Link”。这些连杆连接着手臂末端和手部执行器。
- 手部执行器(Hand/End Effector):
- 虽然手部执行器本身不是一个关节或连杆,但它是机器人手臂的末端部分,用于执行抓取、操作等任务。


————————————————————————————————
——————————————————————————————————

加载模型后,可以使用MATLAB的机器人工具箱(Robotics Toolbox)进行进一步的分析和仿真。
二、机器人运动学
机器人运动学是研究机器人各部分之间的相对运动、速度和加速度的学科。它分为正向运动学和逆向运动学两部分。
- 正向运动学:给定机器人各关节的变量(如关节角度或位移),计算机器人末端执行器(如机械臂的末端)的位置和姿态。正向运动学的解通常是唯一且容易获得的。
- 逆向运动学:已知机器人末端执行器的期望位置和姿态,求解对应的关节变量。逆向运动学问题往往有多个解,且求解过程更为复杂。
在MATLAB中,可以使用机器人工具箱中的函数(如fkine和ikine)进行正向和逆向运动学分析。
三、动力学仿真分析
动力学仿真分析是评估机器人系统动力学响应、优化设计参数和提高运动精度和效率的关键步骤。它涉及到对机器人系统力学特性的建模和仿真,包括质量、惯性、运动学关系和外部施加力等。
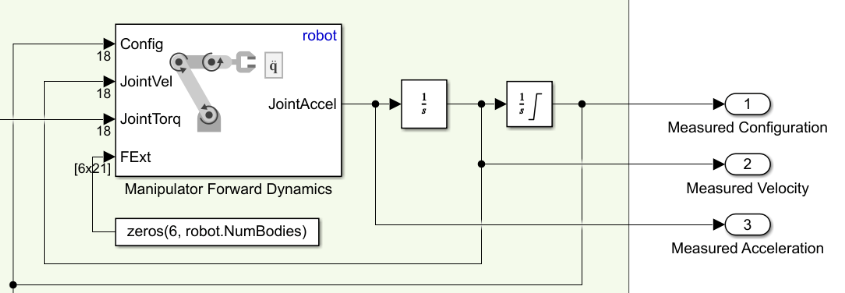
在MATLAB中,可以使用Simulink和MATLAB/Simulink Robotics System Toolbox进行动力学仿真分析。这些工具提供了丰富的库函数和工具箱,可用于机器人运动学和动力学建模、仿真和控制。
仿真分析的步骤通常包括:
- 建立机器人的动力学模型:根据机器人的结构和任务要求,选择合适的动力学模型,并使用数学方程进行建模。
- 确定仿真参数:设置仿真的时间步长、仿真时长、初始条件等参数,以及机器人的质量、惯性、关节摩擦等参数。
- 进行仿真运行:根据建立的动力学模型和设定的仿真参数,进行仿真运行。仿真运行可以得到机器人系统在不同时刻的位姿、速度、加速度等信息。
- 分析仿真结果:对仿真结果进行分析,评估机器人的动力学性能,如稳定性、精度和效率等。
Model and Control a Manipulator Arm with Robotics and Simscape- MATLAB & Simulink- MathWorks 中国Execute a pick-and-place workflow using an ABB YuMi robot, which demonstrates how to design robot algorithms in Simulink®, and then simulate the action in a test environment using Simscape™.![]() https://ww2.mathworks.cn/help/robotics/ug/model-and-control-a-manipulator-arm-with-simscape.html
https://ww2.mathworks.cn/help/robotics/ug/model-and-control-a-manipulator-arm-with-simscape.html
2-D Path Tracing with Inverse Kinematics- MATLAB & Simulink- MathWorks 中国Calculate inverse kinematics for a simple 2-D manipulator.![]() https://ww2.mathworks.cn/help/robotics/ug/2d-inverse-kinematics-example.html
https://ww2.mathworks.cn/help/robotics/ug/2d-inverse-kinematics-example.html
Perform Trajectory Tracking and Compute Joint Torque for Manipulator Using Simscape- MATLAB & Simulink- MathWorks 中国This example shows you how to use Simulink® with Robotics System Toolbox™ to perform trajectory tracking and compute joint torque required to drive the Simscape™ Multibody™ model of the manipulator along the given joint trajectory.![]() https://ww2.mathworks.cn/help/robotics/ug/perform-trajectory-tracking-and-compute-joint-torque-for-manipulator-using-simscape.html
https://ww2.mathworks.cn/help/robotics/ug/perform-trajectory-tracking-and-compute-joint-torque-for-manipulator-using-simscape.html
Motion Planning and RigidBodyTree Simulation of UR5e for Bin Picking Using manipulatorRRT Algorithm- MATLAB & Simulink- MathWorks 中国This example shows the motion planning algorithm design workflow for a real-world cobot bin picking application.![]() https://ww2.mathworks.cn/help/robotics/urseries/ug/motion-planning-rbt-ur5e-simulation-manipulatorrrt-example.html
https://ww2.mathworks.cn/help/robotics/urseries/ug/motion-planning-rbt-ur5e-simulation-manipulatorrrt-example.html
uniUR5e = loadrobot("universalUR5e");Design inverse kinematics solvers, configurations, and waypoints - MATLAB- MathWorks 中国The Inverse Kinematics Designer enables you to design an inverse kinematics solver for a URDF robot model.![]() https://ww2.mathworks.cn/help/robotics/ref/inversekinematicsdesigner-app.html
https://ww2.mathworks.cn/help/robotics/ref/inversekinematicsdesigner-app.html
相关文章:
机器人建模、运动学与动力学仿真分析(importrobot,loadrobot,smimport)
机器人建模、运动学与动力学仿真分析是机器人设计和开发过程中的关键步骤。 一、机器人建模 机器人建模是描述机器人物理结构和运动特性的过程。其中,URDF(Unified Robot Description Format)是一种常用的机器人模型描述方法。通过URDF&…...

02-QWebEngineView的使用
Qt WebEngine_hitzsf的博客-CSDN博客 一、QWebEngineView QWebEngineView 类是一个实现Web浏览器的便捷类,提供了back() 、forward()、reload()、stop() 等方法,可轻松实现页面的前进、后退、重载等导航功能,要实现一个简单的只有网页加载网…...
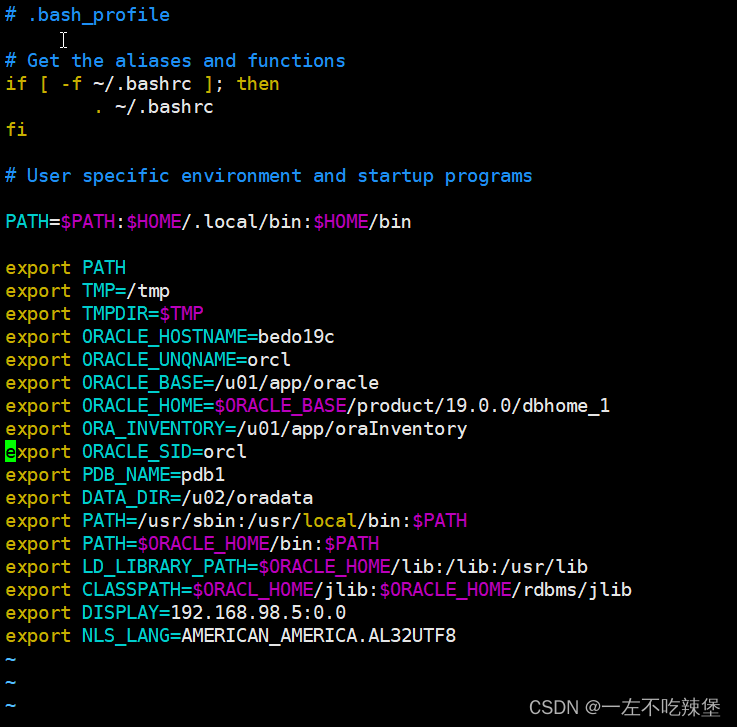
【2024亲测无坑】在Centos.7虚拟机上安装Oracle 19C
目录 一、安装环境准备 1、linux虚拟机安装 2、虚拟机快照 3、空间检查&软件上传 二、Oracle软件安装 1.preinstall安装及其他配置准备 2.oracle安装 三、数据库实例的安装 1.netca——网络配置助手 2.dbca——数据库配置助手 四、ORACLE 19C 在linux centos 7上…...

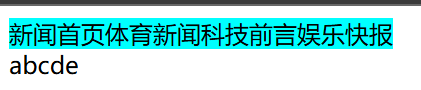
JS中判断一个字符串中出现次数最多的字符,统计这个次数?
在JavaScript中,要判断一个字符串中出现次数最多的字符并统计这个次数,你可以通过创建一个对象来记录每个字符出现的次数,然后遍历这个对象以找到出现次数最多的字符。下面是一个简单的示例代码: function findMostFrequentChar(…...

rust-强化练习
钓鱼不打窝,钓的也不多 语言只靠看不行,还得练,下面是AI生成的一些题目,后续直接肝LeeCode,一举2得 1、猜数字 描述:创建一个简单的猜数字游戏,程序会随机生成一个数字,玩家需要猜出这个数字是…...

TF-IDF算法
TF-IDF算法详解 一、TF-IDF算法概述 TF-IDF(Term Frequency-Inverse Document Frequency)算法是一种常用于信息检索和文本挖掘的加权技术。其基本思想是通过评估一个词在文档中的重要性,来确定这个词在文档集合或语料库中的权重。TF-IDF算法…...
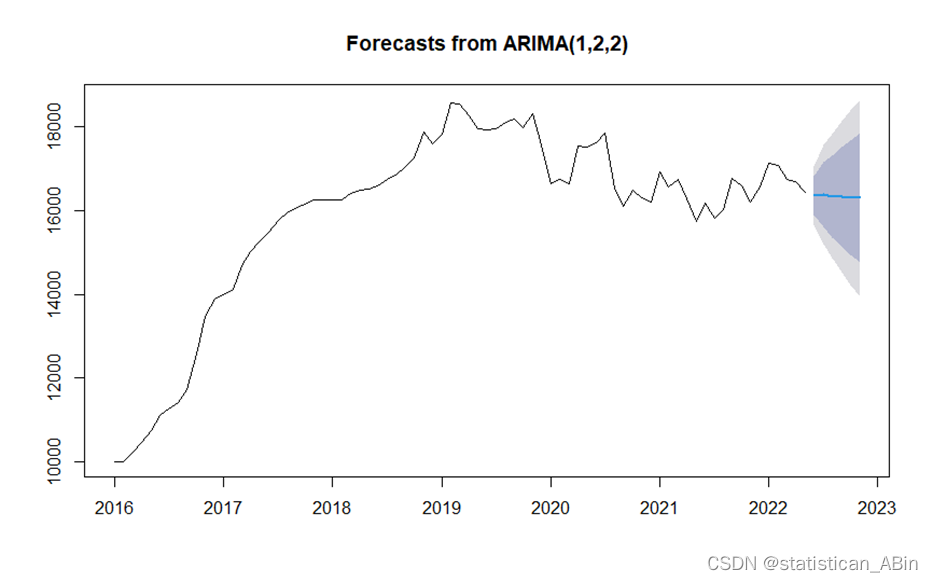
R语言数据分析案例29-基于ARIMA模型的武汉市房价趋势与预测研究
一、选题背景 房地产行业对于国民经济和社会及居民的发展和生活具有很大的影响,而房价能够体现经济运转的好坏,因而房价的波动牵动着开发商和购房者的关注,城市房价预测是一个研究的热点问题,研究房价对民生问题具有重要意义。 …...

面试-NLP八股文
机器学习 交叉熵损失: L − ( y l o g ( y ^ ) ( 1 − y ) l o g ( 1 − ( y ^ ) ) L-(ylog(\hat{y}) (1-y)log(1-(\hat{y})) L−(ylog(y^)(1−y)log(1−(y^))均方误差: L 1 n ∑ i 1 n ( y i − y ^ i ) 2 L \frac{1}{n}\sum\limits_{i1}^{n}…...

数据仓库之离线数仓
离线数据仓库(Offline Data Warehouse)是一种以批处理方式为主的数据仓库系统,旨在收集、存储和分析大量历史数据。离线数据仓库通常用于定期(如每日、每周、每月)更新数据,以支持各种业务分析、报表生成和…...

Mybatis源码解析
MybatisAutoConfiguration或者MybatisPlusAutoConfiguration核心作用是初始化工厂类SqlSessionFactory,其中包含属性interceptors、MapperLocations、TypeAliasesPackage、TypeEnumsPackage、TypeHandlers等。 MybatisAutoConfiguration自动装配类是由依赖…...
前端学习CSS之神奇的块浮动
在盒子模型的基础上就可以对网页进行设计 不知道盒子模型的可以看前面关于盒子模型的内容 而普通的网页设计具有一定的原始规律,这个原始规律就是文档流 文档流 标签在网页二维平面内默认的一种排序方式,块级标签不管怎么设置都会占一行,而同一行不能放置两个块级标签 行级…...

【Java】内部类、枚举、泛型
目录 1.内部类1.1概述1.2分类1.3匿名内部类(重点) 2.枚举2.1一般枚举2.2抽象枚举2.3应用1:用枚举写单例2.4应用2:标识常量 3.泛型3.1泛型认识3.2泛型原理3.3泛型的定义泛型类泛型接口泛型方法 3.4泛型的注意事项 1.内部类 1.1概述 内部类:指…...

LabVIEW电子类实验虚拟仿真系统
开发了基于LabVIEW开发的电子类实验虚拟仿真实验系统。该系统通过图形化编程方式,实现了复杂电子实验操作的虚拟化,不仅提高了学生的操作熟练度和学习兴趣,而且通过智能评价模块提供即时反馈,促进教学和学习的互动。 项目背景 在…...

SVM支持向量机
SVM的由来和概念 间隔最大化是找最近的那个点的距离’ 之前我们学习的都是线性超平面,现在我们要将超平面变成圈 对于非线性问题升维来解决 对于下图很难处理,我们可以将棍子立起来,然后说不定red跑到左边了,green跑到右边了(可能增加了某种筛选条件导致两个豆子分离)(只是一种…...

【Unity】RPG2D龙城纷争(二)关卡、地块
更新日期:2024年6月12日。 项目源码:后续章节发布 索引 简介地块(Block)一、定义地块类二、地块类型三、地块渲染四、地块索引 关卡(Level)一、定义关卡类二、关卡基础属性三、地块集合四、关卡初始化五、关…...
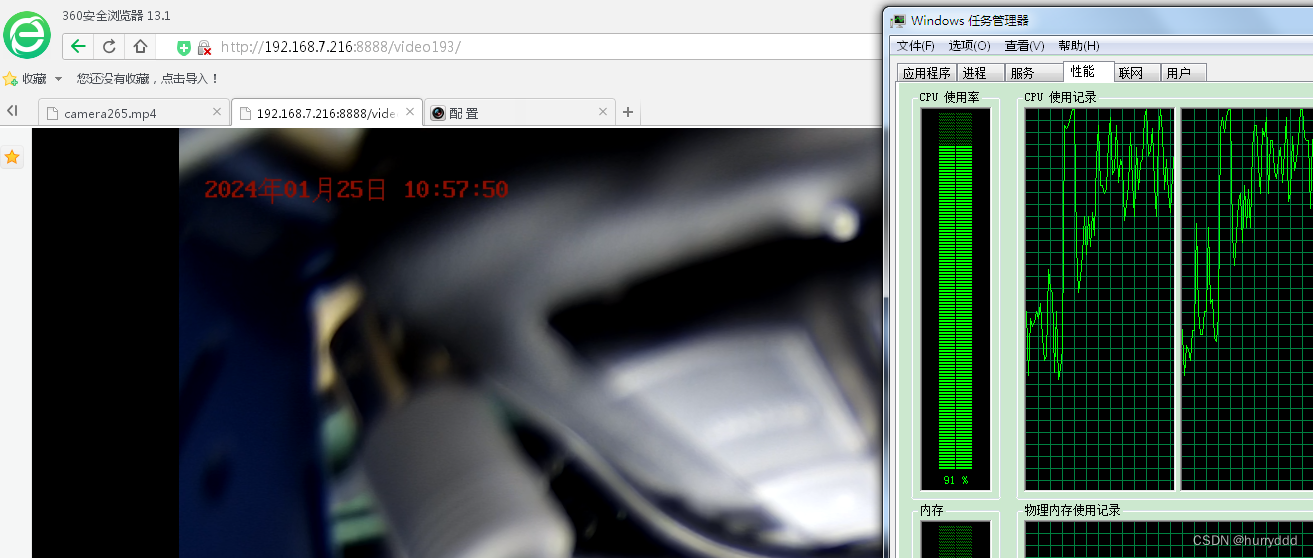
mediamtx流媒体服务器测试
MediaMTX简介 在web页面中直接播放rtsp视频流,重点推荐:mediamtx,不仅仅是rtsp-CSDN博客 mediamtx github MediaMTX(以前的rtsp-simple-server)是一个现成的和零依赖的实时媒体服务器和媒体代理,允许发布,读取&…...

C# 循环
C# 循环 在编程中,循环是一种控制结构,它允许我们重复执行一段代码多次。C# 提供了几种循环机制,以适应不同的编程需求。本文将详细介绍 C# 中常用的几种循环类型,包括 for 循环、while 循环、do-while 循环和 foreach 循环&…...

PHP杂货铺家庭在线记账理财管理系统源码
家庭在线记帐理财系统,让你对自己的开支了如指掌,图形化界面操作更简单,非常适合家庭理财、记账,系统界面简洁优美,操作直观简单,非常容易上手。 安装说明: 1、上传到网站根目录 2、用phpMyad…...
)
机器学习中的神经网络重难点!纯干货(上篇)
. . . . . . . . .纯干货 . . . . . . 目录 前馈神经网络 基本原理 公式解释 一个示例 卷积神经网络 基本原理 公式解释 一个示例 循环神经网络 基本原理 公式解释 一个案例 长短时记忆网络 基本原理 公式解释 一个示例 自注意力模型 基本原理…...

[DDR4] DDR1 ~ DDR4 发展史导论
依公知及经验整理,原创保护,禁止转载。 专栏 《深入理解DDR4》 内存和硬盘是电脑的左膀右臂, 挑起存储的大梁。因为内存的存取速度超凡地快, 但内存上的数据掉电又会丢失,一直其中缓存的作用,就像是我们的工…...
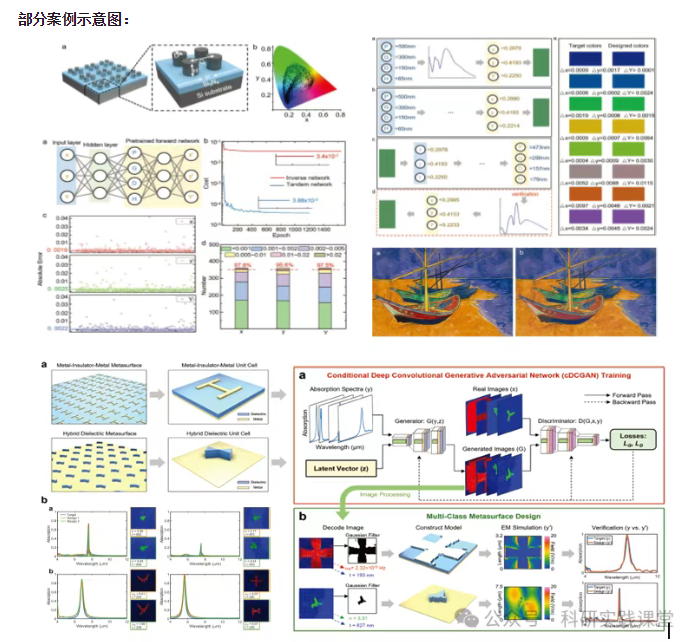
深度学习在微纳光子学中的应用
深度学习在微纳光子学中的主要应用方向 深度学习与微纳光子学的结合主要集中在以下几个方向: 逆向设计 通过神经网络快速预测微纳结构的光学响应,替代传统耗时的数值模拟方法。例如设计超表面、光子晶体等结构。 特征提取与优化 从复杂的光学数据中自…...

智慧工地云平台源码,基于微服务架构+Java+Spring Cloud +UniApp +MySql
智慧工地管理云平台系统,智慧工地全套源码,java版智慧工地源码,支持PC端、大屏端、移动端。 智慧工地聚焦建筑行业的市场需求,提供“平台网络终端”的整体解决方案,提供劳务管理、视频管理、智能监测、绿色施工、安全管…...
)
【位运算】消失的两个数字(hard)
消失的两个数字(hard) 题⽬描述:解法(位运算):Java 算法代码:更简便代码 题⽬链接:⾯试题 17.19. 消失的两个数字 题⽬描述: 给定⼀个数组,包含从 1 到 N 所有…...
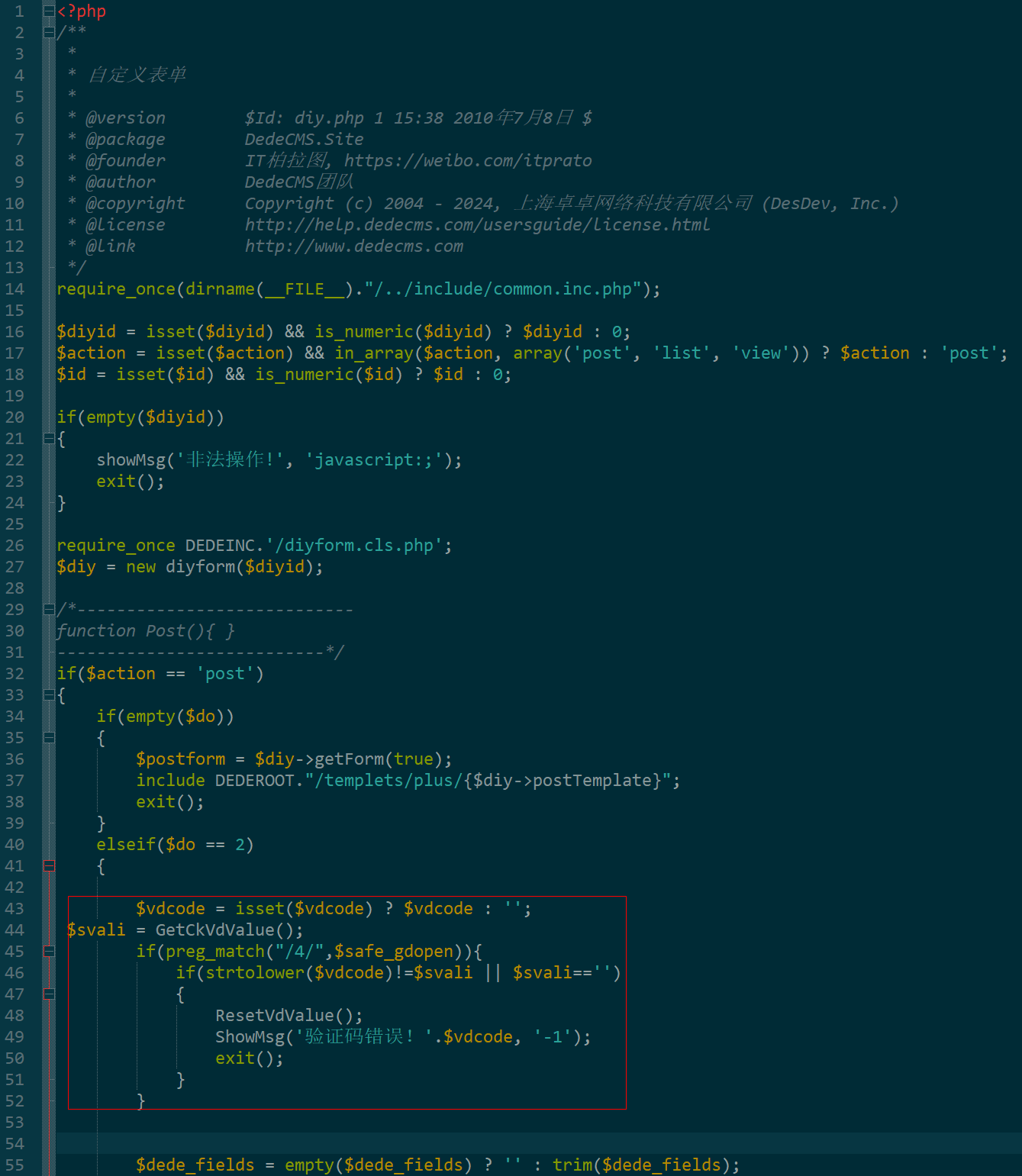
dedecms 织梦自定义表单留言增加ajax验证码功能
增加ajax功能模块,用户不点击提交按钮,只要输入框失去焦点,就会提前提示验证码是否正确。 一,模板上增加验证码 <input name"vdcode"id"vdcode" placeholder"请输入验证码" type"text&quo…...
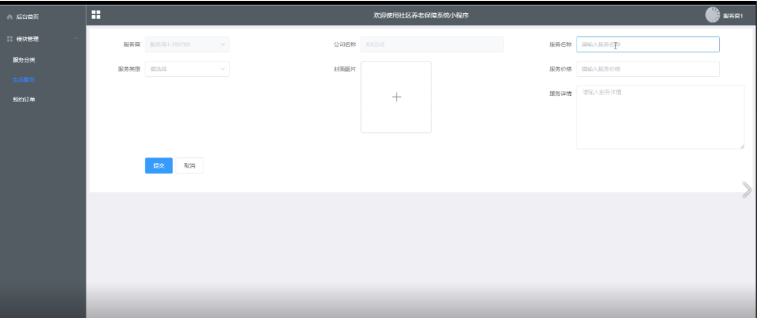
Springboot社区养老保险系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,社区养老保险系统小程序被用户普遍使用,为方…...
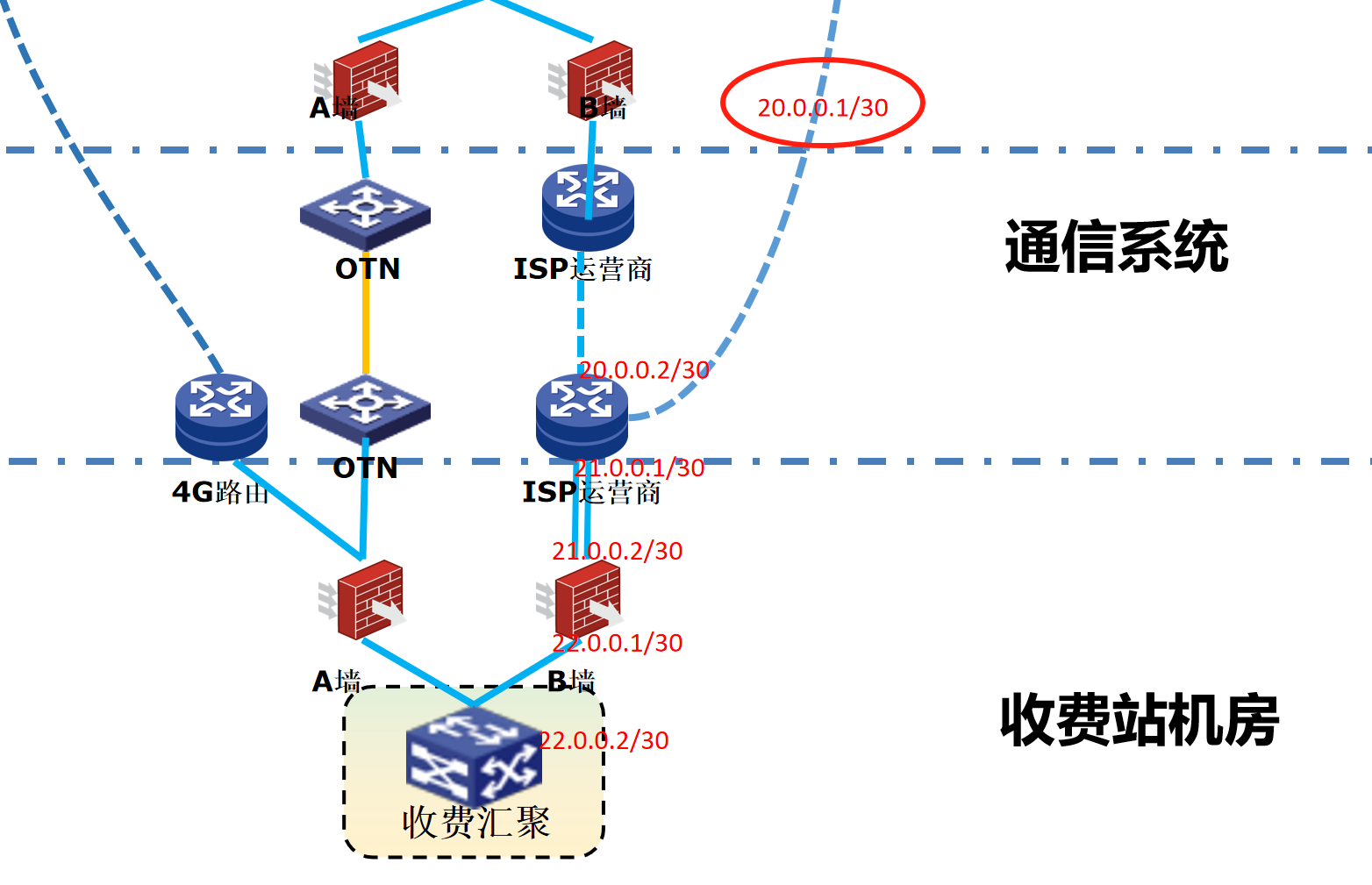
浪潮交换机配置track检测实现高速公路收费网络主备切换NQA
浪潮交换机track配置 项目背景高速网络拓扑网络情况分析通信线路收费网络路由 收费汇聚交换机相应配置收费汇聚track配置 项目背景 在实施省内一条高速公路时遇到的需求,本次涉及的主要是收费汇聚交换机的配置,浪潮网络设备在高速项目很少,通…...
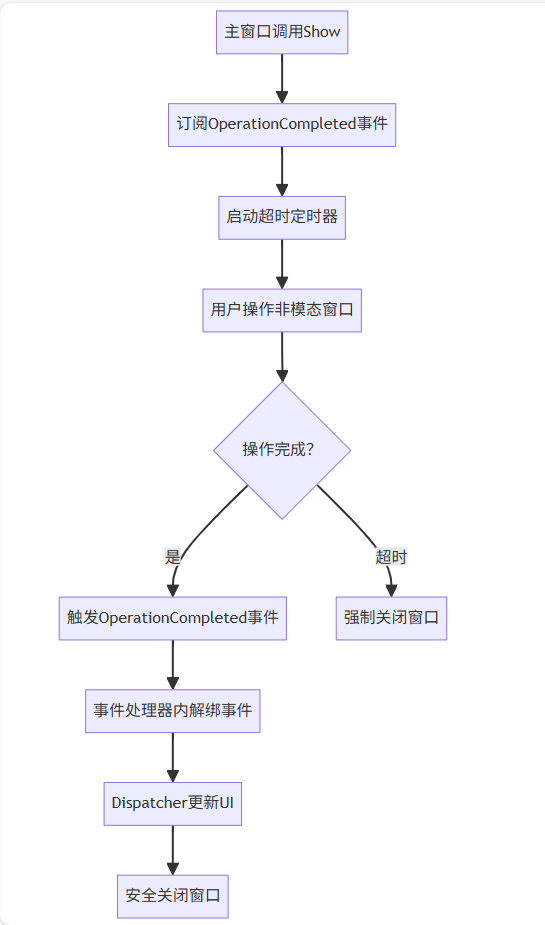
WPF八大法则:告别模态窗口卡顿
⚙️ 核心问题:阻塞式模态窗口的缺陷 原始代码中ShowDialog()会阻塞UI线程,导致后续逻辑无法执行: var result modalWindow.ShowDialog(); // 线程阻塞 ProcessResult(result); // 必须等待窗口关闭根本问题:…...
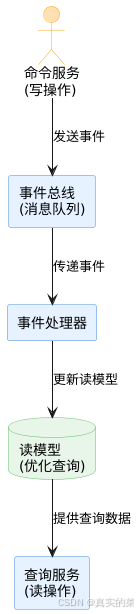
消息队列系统设计与实践全解析
文章目录 🚀 消息队列系统设计与实践全解析🔍 一、消息队列选型1.1 业务场景匹配矩阵1.2 吞吐量/延迟/可靠性权衡💡 权衡决策框架 1.3 运维复杂度评估🔧 运维成本降低策略 🏗️ 二、典型架构设计2.1 分布式事务最终一致…...

ubuntu系统文件误删(/lib/x86_64-linux-gnu/libc.so.6)修复方案 [成功解决]
报错信息:libc.so.6: cannot open shared object file: No such file or directory: #ls, ln, sudo...命令都不能用 error while loading shared libraries: libc.so.6: cannot open shared object file: No such file or directory重启后报错信息&…...

云安全与网络安全:核心区别与协同作用解析
在数字化转型的浪潮中,云安全与网络安全作为信息安全的两大支柱,常被混淆但本质不同。本文将从概念、责任分工、技术手段、威胁类型等维度深入解析两者的差异,并探讨它们的协同作用。 一、核心区别 定义与范围 网络安全:聚焦于保…...