基于STM32和人工智能的自动驾驶小车系统
目录
- 引言
- 环境准备
- 自动驾驶小车系统基础
- 代码实现:实现自动驾驶小车系统
- 4.1 数据采集模块
- 4.2 数据处理与分析
- 4.3 控制系统
- 4.4 用户界面与数据可视化
- 应用场景:自动驾驶应用与优化
- 问题解决方案与优化
- 收尾与总结
1. 引言
随着人工智能和嵌入式系统技术的发展,自动驾驶技术在交通、物流等领域得到了广泛应用。本文将详细介绍如何在STM32嵌入式系统中结合人工智能技术实现一个自动驾驶小车系统,包括环境准备、系统架构、代码实现、应用场景及问题解决方案和优化方法。
2. 环境准备
硬件准备
- 开发板:STM32F407 Discovery Kit
- 调试器:ST-LINK V2或板载调试器
- 超声波传感器:用于距离测量和避障
- 红外传感器:用于线路跟踪
- 摄像头模块:用于图像识别
- 电机驱动模块:如L298N,用于控制电机
- 直流电机:用于驱动小车
- 显示屏:如TFT LCD显示屏
- 按键或旋钮:用于用户输入和设置
- 电源:12V或24V电源适配器
软件准备
- 集成开发环境(IDE):STM32CubeIDE或Keil MDK
- 调试工具:STM32 ST-LINK Utility或GDB
- 库和中间件:STM32 HAL库、TensorFlow Lite
- 人工智能模型:用于图像识别和路径规划
安装步骤
- 下载并安装 STM32CubeMX
- 下载并安装 STM32CubeIDE
- 配置STM32CubeMX项目并生成STM32CubeIDE项目
- 安装必要的库和驱动程序
- 下载并集成 TensorFlow Lite 库
3. 自动驾驶小车系统基础
控制系统架构
自动驾驶小车系统由以下部分组成:
- 数据采集模块:用于采集环境数据(距离、图像、线路等)
- 数据处理与分析:使用人工智能算法对采集的数据进行分析和路径规划
- 控制系统:根据分析结果控制电机驱动小车
- 显示系统:用于显示小车状态和路径信息
- 用户输入系统:通过按键或旋钮进行设置和调整
功能描述
通过超声波传感器、红外传感器和摄像头采集环境数据,并使用人工智能算法进行分析和路径规划,控制电机驱动小车自动行驶和避障。用户可以通过按键或旋钮进行设置,并通过显示屏查看小车状态和路径信息。
4. 代码实现:实现自动驾驶小车系统
4.1 数据采集模块
配置超声波传感器
使用STM32CubeMX配置GPIO和TIM接口:
打开STM32CubeMX,选择您的STM32开发板型号。
在图形化界面中,找到需要配置的GPIO和TIM引脚,设置为输入模式。
生成代码并导入到STM32CubeIDE中。
代码实现
#include "stm32f4xx_hal.h"#define TRIG_PIN GPIO_PIN_0
#define ECHO_PIN GPIO_PIN_1
#define GPIO_PORT GPIOATIM_HandleTypeDef htim2;void GPIO_Init(void) {__HAL_RCC_GPIOA_CLK_ENABLE();GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = TRIG_PIN;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIO_PORT, &GPIO_InitStruct);GPIO_InitStruct.Pin = ECHO_PIN;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIO_PORT, &GPIO_InitStruct);
}void TIM_Init(void) {__HAL_RCC_TIM2_CLK_ENABLE();TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};htim2.Instance = TIM2;htim2.Init.Prescaler = 84 - 1;htim2.Init.CounterMode = TIM_COUNTERMODE_UP;htim2.Init.Period = 0xFFFF;htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;HAL_TIM_Base_Init(&htim2);sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig);HAL_TIM_Base_Start(&htim2);
}uint32_t Read_Ultrasonic_Distance(void) {uint32_t local_time = 0;HAL_GPIO_WritePin(GPIO_PORT, TRIG_PIN, GPIO_PIN_SET);HAL_Delay(10);HAL_GPIO_WritePin(GPIO_PORT, TRIG_PIN, GPIO_PIN_RESET);while (!(HAL_GPIO_ReadPin(GPIO_PORT, ECHO_PIN)));while (HAL_GPIO_ReadPin(GPIO_PORT, ECHO_PIN)) {local_time++;HAL_Delay(1);}return local_time;
}int main(void) {HAL_Init();SystemClock_Config();GPIO_Init();TIM_Init();uint32_t distance;while (1) {distance = Read_Ultrasonic_Distance();HAL_Delay(100
配置红外传感器
使用STM32CubeMX配置GPIO接口:
打开STM32CubeMX,选择您的STM32开发板型号。
在图形化界面中,找到需要配置的GPIO引脚,设置为输入模式。
生成代码并导入到STM32CubeIDE中。
代码实现
#include "stm32f4xx_hal.h"#define IR_SENSOR_PIN GPIO_PIN_2
#define GPIO_PORT GPIOAvoid GPIO_Init(void) {__HAL_RCC_GPIOA_CLK_ENABLE();GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = IR_SENSOR_PIN;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIO_PORT, &GPIO_InitStruct);
}uint8_t Read_IR_Sensor(void) {return HAL_GPIO_ReadPin(GPIO_PORT, IR_SENSOR_PIN);
}int main(void) {HAL_Init();SystemClock_Config();GPIO_Init();uint8_t ir_state;while (1) {ir_state = Read_IR_Sensor();HAL_Delay(1000);}
}
配置摄像头模块
使用STM32CubeMX配置SPI或I2C接口:
打开STM32CubeMX,选择您的STM32开发板型号。
在图形化界面中,找到需要配置的SPI或I2C引脚,设置为相应的通信模式。
生成代码并导入到STM32CubeIDE中。
代码实现
#include "stm32f4xx_hal.h"
#include "camera.h"void Camera_Init(void) {// 初始化摄像头模块
}void Camera_Capture_Image(uint8_t* image_buffer) {// 捕获图像数据
}int main(void) {HAL_Init();SystemClock_Config();Camera_Init();uint8_t image_buffer[IMAGE_SIZE];while (1) {Camera_Capture_Image(image_buffer);HAL_Delay(5000); // 每5秒捕获一次图像}
}
4.2 数据处理与分析
集成TensorFlow Lite进行数据分析
使用STM32CubeMX配置必要的接口,确保嵌入式系统能够加载和运行TensorFlow Lite模型。
代码实现
#include "tensorflow/lite/c/common.h"
#include "tensorflow/lite/micro/micro_interpreter.h"
#include "tensorflow/lite/micro/micro_error_reporter.h"
#include "tensorflow/lite/micro/micro_mutable_op_resolver.h"
#include "tensorflow/lite/schema/schema_generated.h"
#include "tensorflow/lite/version.h"
#include "model_data.h" // 人工智能模型数据namespace {tflite::MicroErrorReporter micro_error_reporter;tflite::MicroInterpreter* interpreter = nullptr;TfLiteTensor* input = nullptr;TfLiteTensor* output = nullptr;constexpr int kTensorArenaSize = 2 * 1024;uint8_t tensor_arena[kTensorArenaSize];
}void AI_Init(void) {tflite::InitializeTarget();static tflite::MicroMutableOpResolver<10> micro_op_resolver;micro_op_resolver.AddFullyConnected();micro_op_resolver.AddSoftmax();const tflite::Model* model = tflite::GetModel(model_data);if (model->version() !=if (model->version() != TFLITE_SCHEMA_VERSION) {TF_LITE_REPORT_ERROR(µ_error_reporter,"Model provided is schema version %d not equal ""to supported version %d.",model->version(), TFLITE_SCHEMA_VERSION);return;}static tflite::MicroInterpreter static_interpreter(model, micro_op_resolver, tensor_arena, kTensorArenaSize,µ_error_reporter);interpreter = &static_interpreter;interpreter->AllocateTensors();input = interpreter->input(0);output = interpreter->output(0);
}void AI_Run_Inference(uint8_t* image_data, float* output_data) {// 拷贝输入数据到模型输入张量for (int i = 0; i < input->dims->data[1]; ++i) {input->data.uint8[i] = image_data[i];}// 运行模型推理if (interpreter->Invoke() != kTfLiteOk) {TF_LITE_REPORT_ERROR(µ_error_reporter, "Invoke failed.");return;}// 拷贝输出数据for (int i = 0; i < output->dims->data[1]; ++i) {output_data[i] = output->data.f[i];}
}int main(void) {HAL_Init();SystemClock_Config();AI_Init();Camera_Init();uint8_t image_buffer[IMAGE_SIZE];float output_data[OUTPUT_SIZE];while (1) {// 捕获图像数据Camera_Capture_Image(image_buffer);// 运行AI推理AI_Run_Inference(image_buffer, output_data);// 根据模型输出数据执行相应的操作HAL_Delay(1000);}
}
4.3 控制系统
配置GPIO控制电机驱动模块
使用STM32CubeMX配置GPIO接口:
打开STM32CubeMX,选择您的STM32开发板型号。
在图形化界面中,找到需要配置的GPIO引脚,设置为输出模式。
生成代码并导入到STM32CubeIDE中。
代码实现
#include "stm32f4xx_hal.h"#define MOTOR_LEFT_PIN GPIO_PIN_0
#define MOTOR_RIGHT_PIN GPIO_PIN_1
#define GPIO_PORT GPIOBvoid GPIO_Init(void) {__HAL_RCC_GPIOB_CLK_ENABLE();GPIO_InitTypeDef GPIO_InitStruct = {0};GPIO_InitStruct.Pin = MOTOR_LEFT_PIN | MOTOR_RIGHT_PIN;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIO_PORT, &GPIO_InitStruct);
}void Control_Motor(uint8_t left_state, uint8_t right_state) {HAL_GPIO_WritePin(GPIO_PORT, MOTOR_LEFT_PIN, left_state ? GPIO_PIN_SET : GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIO_PORT, MOTOR_RIGHT_PIN, right_state ? GPIO_PIN_SET : GPIO_PIN_RESET);
}int main(void) {HAL_Init();SystemClock_Config();GPIO_Init();AI_Init();uint8_t left_motor_state;uint8_t right_motor_state;uint8_t image_buffer[IMAGE_SIZE];float output_data[OUTPUT_SIZE];while (1) {// 捕获图像数据Camera_Capture_Image(image_buffer);// 运行AI推理AI_Run_Inference(image_buffer, output_data);// 根据AI输出控制电机left_motor_state = output_data[0] > 0.5;right_motor_state = output_data[1] > 0.5;Control_Motor(left_motor_state, right_motor_state);HAL_Delay(100);}
}
4.4 用户界面与数据可视化
配置TFT LCD显示屏
使用STM32CubeMX配置SPI接口:
打开STM32CubeMX,选择您的STM32开发板型号。
在图形化界面中,找到需要配置的SPI引脚,设置为SPI模式。
生成代码并导入到STM32CubeIDE中。
代码实现
#include "stm32f4xx_hal.h"
#include "spi.h"
#include "lcd_tft.h"void Display_Init(void) {LCD_TFT_Init();
}void Display_Car_Data(float* output_data) {char buffer[32];sprintf(buffer, "Left Motor: %s", output_data[0] > 0.5 ? "ON" : "OFF");LCD_TFT_Print(buffer);sprintf(buffer, "Right Motor: %s", output_data[1] > 0.5 ? "ON" : "OFF");LCD_TFT_Print(buffer);
}int main(void) {HAL_Init();SystemClock_Config();GPIO_Init();AI_Init();Display_Init();uint8_t image_buffer[IMAGE_SIZE];float output_data[OUTPUT_SIZE];while (1) {// 捕获图像数据并填充 input_data 数组Camera_Capture_Image(image_buffer);// 运行AI推理AI_Run_Inference(image_buffer, output_data);// 显示小车状态数据和AI结果Display_Car_Data(output_data);// 根据AI结果控制电机uint8_t left_motor_state = output_data[0] > 0.5;uint8_t right_motor_state = output_data[1] > 0.5;Control_Motor(left_motor_state, right_motor_state);HAL_Delay(100);}
}
5. 应用场景:自动驾驶应用与优化
智能物流
自动驾驶小车可以应用于物流领域,通过智能路径规划和避障技术,提高物流运输效率和安全性。
智能农业
在农业领域,自动驾驶小车可以用于农作物的种植和管理,自动化执行各种农务操作,提升农业生产力。
智能巡检
自动驾驶小车可以用于工业和基础设施的巡检,通过实时监控和数据分析,及时发现和处理问题。
⬇帮大家整理了单片机的资料
包括stm32的项目合集【源码+开发文档】
点击下方蓝字即可领取,感谢支持!⬇
点击领取更多嵌入式详细资料
问题讨论,stm32的资料领取可以私信!
6. 问题解决方案与优化
常见问题及解决方案
- 传感器数据不准确:确保传感器与STM32的连接稳定,定期校准传感器以获取准确数据。
- 设备响应延迟:优化控制逻辑和硬件配置,减少设备响应时间,提高系统反应速度。
- 显示屏显示异常:检查SPI通信线路,确保显示屏与MCU之间的通信正常,避免由于线路问题导致的显示异常。
优化建议
- 数据集成与分析:集成更多类型的传感器数据,使用大数据分析和机器学习技术进行环境预测和趋势分析。
- 用户交互优化:改进用户界面设计,提供更直观的数据展示和更简洁的操作界面,增强用户体验。
- 智能化控制提升:增加智能决策支持系统,根据历史数据和实时数据自动调整控制策略,实现更高效的自动驾驶管理。
7. 收尾与总结
本教程详细介绍了如何在STM32嵌入式系统中结合人工智能技术实现智能自动驾驶小车,从硬件选择、软件实现到系统配置和应用场景都进行了全面的阐述。通过合理的技术选择和系统设计,可以构建一个高效且功能强大的自动驾驶小车系统。在实际应用中,还可以根据具体需求进行优化和扩展,提升系统的性能和可靠性。
相关文章:

基于STM32和人工智能的自动驾驶小车系统
目录 引言环境准备自动驾驶小车系统基础代码实现:实现自动驾驶小车系统 4.1 数据采集模块4.2 数据处理与分析4.3 控制系统4.4 用户界面与数据可视化应用场景:自动驾驶应用与优化问题解决方案与优化收尾与总结 1. 引言 随着人工智能和嵌入式系统技术的…...
简单介绍vim
文章目录 前言一、Vim的特点二、安装Vim三、设置Vim配置文件的位置:编辑配置文件:添加配置选项:保存并退出编辑器:快速配置验证设置: 总结 前言 Vim是一款强大的文本编辑器,被广泛用于各种编程和文本编辑任…...
使用本地数据对transformers模型进行微调训练
模型 transformers模型是使用比较多的模型,奈何各个都是体积大,找了一个使用人多不是很大的模型进行训练。 需要魔法 bert-base-uncased模型仓库地址 huggingface下的所有仓库都是git的,也就意味着你可以使用 git clone 可以下载仓库内所有的…...

Java面试题:讨论何时需要创建自定义异常类,并展示如何实现一个自定义异常
在Java中,创建自定义异常类的目的是为了更加清晰和有意义地表示特定的错误情况,增强代码的可读性和可维护性。以下是一些需要创建自定义异常类的常见场景以及如何实现一个自定义异常。 何时需要创建自定义异常类 特定业务逻辑错误: 当业务逻…...

什么是进程
自学python如何成为大佬(目录):https://blog.csdn.net/weixin_67859959/article/details/139049996?spm1001.2014.3001.5501 在了解进程之前,我们需要知道多任务的概念。多任务,顾名思义,就是指操作系统能够执行多个任务。例如,…...

电脑提示d3dcompiler_47.dll丢失的解决方法,实测靠谱的5种方法
在计算机使用过程中,缺失d3dcompiler_47.dll这一系统文件是一个常见问题,尤其是对于游戏和图形密集型应用程序用户来说尤为重要。这个文件是DirectX软件工具包的一部分,主要用于处理图形渲染的应用程序接口的核心元素。当你在运行游戏或某些软…...

SQLserver前五讲课堂笔记
第一讲 基本内容 为什么要学习数据库系统?什么是数据库?什么是数据库系统?什么是数据库管理系统?本课程学什么以及学到什么程度? 重点难点 一组概念的区分:数据库、数据库系统和数据库管理系统熟悉表 的相关要素及术语熟悉数据库系统的构成(工作…...
深度学习项目十六:根据训练好的权重文件推理图片--YOLO系列
文章目录 根据训练好的权重文件推理图片--YOLO系列一、自己构建YOLOv5推理代码1.1 对数据集进行模型训练1.2 对数据集进行模型推理检测1.3 自己编写推理函数1.3.1 针对单张进行推理1.3.2 针对文件夹下的图片进行推理二、自己构建YOLOv8推理代码2.1 对数据集进行模型训练2.2 对数…...
敏感信息加密操作,让开发的系统更加的安全可靠!!
敏感信息加密操作,让开发的系统更加的安全可靠!!Jasypt(Java Simplified Encryption)是一个开源的Java库,用于简化加密操作。https://mp.weixin.qq.com/s/sPBV8Ej46YJsElImodRjAQ...

第四篇:精通Docker构建:Dockerfile的艺术与策略
精通Docker构建:Dockerfile的艺术与策略 1. 开篇:探索Docker的革命 在探讨我们的主题之前,让我们先回顾一下Docker的概念。Docker是一个开源平台,用于自动化应用程序的部署、扩展和管理,这一切都是在轻量级的容器中进…...

Linux下Cmake安装或版本更新
下载Cmake源码 https://cmake.org/download/ 找到对应的版本和类型 放进linux环境解压 编译 安装 tar -vxvf cmake-3.13.0.tar.gz cd cmake-3.13.0 ./bootstrap make make install设置环境变量 vi ~/.bashrc在文件尾加入 export PATH/your_path/cmake-3.13.0/bin:$PAT…...

人工智能体验工程师面试
在面试人工智能体验工程师时,面试官可能会从多个方面来考察候选人的能力和经验。以下是人工智能体验工程师面试题: 基础知识考察: 请简述人工智能、机器学习和深度学习的关系与区别。请解释神经网络的基本原理,以及它在人工智能中的应用。描述一种你熟悉的深度学习模型,并…...
科研——BIBM论文修改和提交
文章目录 引言投递流程Latex翻译流程latex模板使用bib文件正文修改 反馈时间线等待审稿结果 引言 第一轮投递快结束了,这里得加快进度,二十号截至,这里得在截至之前投一下,这里翻译整理一下投递的流程 投递流程 投递链接论文是…...
【bug】配置SpringCloudAlibaba AI的maven依赖问题
问题描述 尝鲜alibaba的ai模块,maven依赖一直报找不到包,报错如下 Unresolved dependency: org.springframework.ai:spring-ai-core:jar:0.8.1原因分析: 由于是按照官方文档配置的,所以检查了很多遍maven配置,加上去…...

人工智能和机器学习的应用日益广泛,在医疗健康领域的具体应用是什么?
人工智能(AI)和机器学习(ML)在医疗健康领域的应用日益广泛,涵盖了从疾病预测、辅助诊断、药物研发到健康管理等多个方面。以下是一些具体的应用实例和成功案例: 疾病预测与辅助诊断:机器学习算…...

前端:鼠标点击实现高亮特效
一、实现思路 获取鼠标点击位置 通过鼠标点击位置设置高亮裁剪动画 二、效果展示 三、按钮组件代码 <template><buttonclass"blueBut"click"clickHandler":style"{backgroundColor: clickBut ? rgb(31, 67, 117) : rgb(128, 128, 128),…...
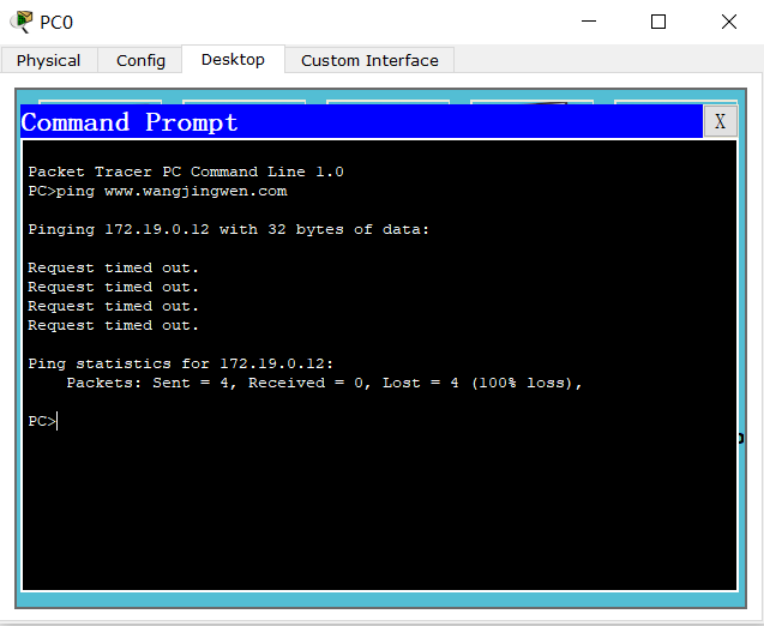
【计算机网络体系结构】计算机网络体系结构实验-DNS模拟器实验
一、DNS模拟器实验 拓扑图 1. 服务器ip 2. 服务器填写记录 3. 客户端ip以及连接到DNS服务器 4. ping测试...
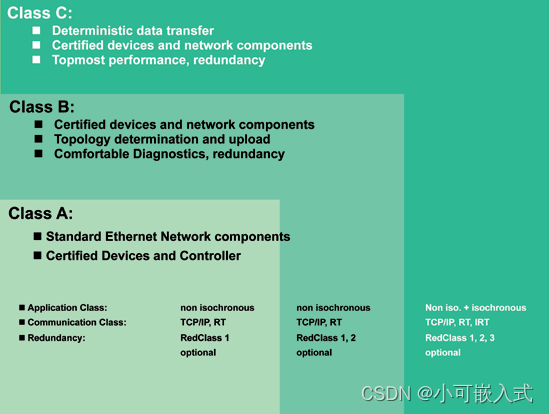
【profinet】从站开发要点
目录 0、常见缩写及关键字注释 1、profinet简介 2、profinet协议栈 3、profinet数据帧 4、profinet网络解决方案示例 5、Application areas 注:本文主要简述profinet从站开发涉及到的知识点。【不足之处后续慢慢补充】。 0、常见缩写及关键字注释 MRP: Media…...

浮点数的进制转换
浮点数的进制转换涉及到将十进制(基数为10)的浮点数转换为其他进制(如二进制、八进制、十六进制等)。以下是将十进制浮点数转换为其他进制的基本步骤: ### 1. 分离整数部分和小数部分: 将浮点数分为整数部…...

vue-饼形图-详细
显示效果 代码 <template> <div style"height: 350px;"> <div :class"className" :style"{height:height,width:width}"></div> </div> </template> <script> import * as echarts from echarts; req…...

java_网络服务相关_gateway_nacos_feign区别联系
1. spring-cloud-starter-gateway 作用:作为微服务架构的网关,统一入口,处理所有外部请求。 核心能力: 路由转发(基于路径、服务名等)过滤器(鉴权、限流、日志、Header 处理)支持负…...
使用rpicam-app通过网络流式传输视频)
树莓派超全系列教程文档--(62)使用rpicam-app通过网络流式传输视频
使用rpicam-app通过网络流式传输视频 使用 rpicam-app 通过网络流式传输视频UDPTCPRTSPlibavGStreamerRTPlibcamerasrc GStreamer 元素 文章来源: http://raspberry.dns8844.cn/documentation 原文网址 使用 rpicam-app 通过网络流式传输视频 本节介绍来自 rpica…...
)
React Native 开发环境搭建(全平台详解)
React Native 开发环境搭建(全平台详解) 在开始使用 React Native 开发移动应用之前,正确设置开发环境是至关重要的一步。本文将为你提供一份全面的指南,涵盖 macOS 和 Windows 平台的配置步骤,如何在 Android 和 iOS…...
练习(含atoi的模拟实现,自定义类型等练习)
一、结构体大小的计算及位段 (结构体大小计算及位段 详解请看:自定义类型:结构体进阶-CSDN博客) 1.在32位系统环境,编译选项为4字节对齐,那么sizeof(A)和sizeof(B)是多少? #pragma pack(4)st…...

线程与协程
1. 线程与协程 1.1. “函数调用级别”的切换、上下文切换 1. 函数调用级别的切换 “函数调用级别的切换”是指:像函数调用/返回一样轻量地完成任务切换。 举例说明: 当你在程序中写一个函数调用: funcA() 然后 funcA 执行完后返回&…...

java调用dll出现unsatisfiedLinkError以及JNA和JNI的区别
UnsatisfiedLinkError 在对接硬件设备中,我们会遇到使用 java 调用 dll文件 的情况,此时大概率出现UnsatisfiedLinkError链接错误,原因可能有如下几种 类名错误包名错误方法名参数错误使用 JNI 协议调用,结果 dll 未实现 JNI 协…...
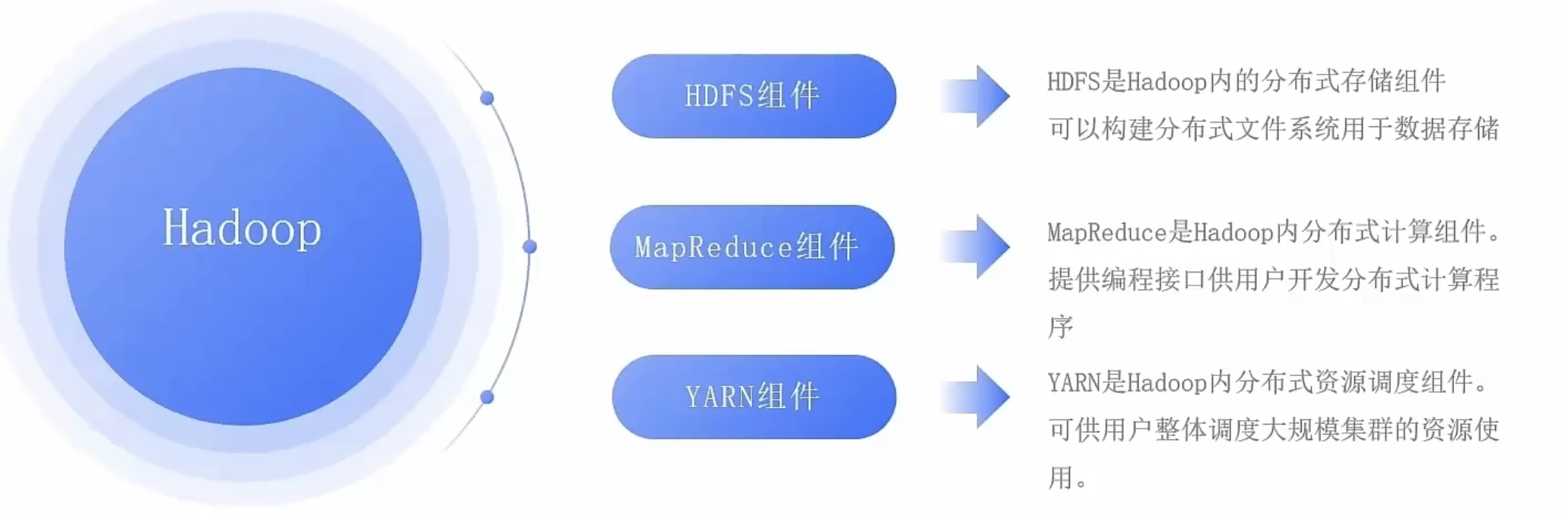
大数据零基础学习day1之环境准备和大数据初步理解
学习大数据会使用到多台Linux服务器。 一、环境准备 1、VMware 基于VMware构建Linux虚拟机 是大数据从业者或者IT从业者的必备技能之一也是成本低廉的方案 所以VMware虚拟机方案是必须要学习的。 (1)设置网关 打开VMware虚拟机,点击编辑…...

MySQL账号权限管理指南:安全创建账户与精细授权技巧
在MySQL数据库管理中,合理创建用户账号并分配精确权限是保障数据安全的核心环节。直接使用root账号进行所有操作不仅危险且难以审计操作行为。今天我们来全面解析MySQL账号创建与权限分配的专业方法。 一、为何需要创建独立账号? 最小权限原则…...
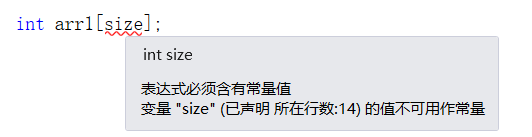
C++使用 new 来创建动态数组
问题: 不能使用变量定义数组大小 原因: 这是因为数组在内存中是连续存储的,编译器需要在编译阶段就确定数组的大小,以便正确地分配内存空间。如果允许使用变量来定义数组的大小,那么编译器就无法在编译时确定数组的大…...
[免费]微信小程序问卷调查系统(SpringBoot后端+Vue管理端)【论文+源码+SQL脚本】
大家好,我是java1234_小锋老师,看到一个不错的微信小程序问卷调查系统(SpringBoot后端Vue管理端)【论文源码SQL脚本】,分享下哈。 项目视频演示 【免费】微信小程序问卷调查系统(SpringBoot后端Vue管理端) Java毕业设计_哔哩哔哩_bilibili 项…...