ubuntu下同时安装和使用不同版本的库 librealsense
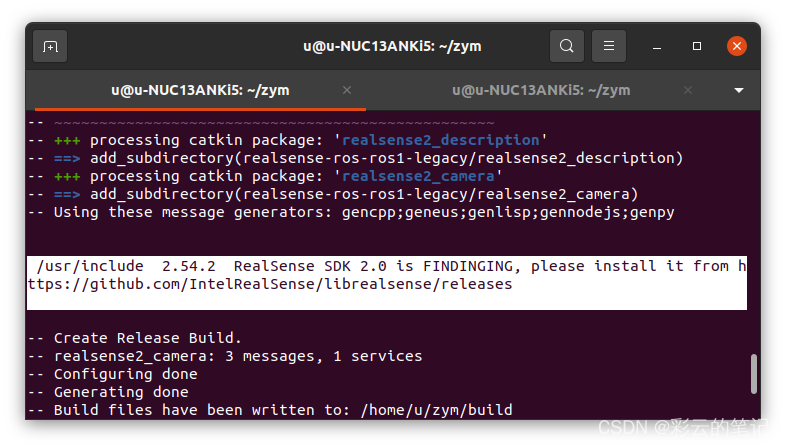
apt 安装的最新版本在/usr
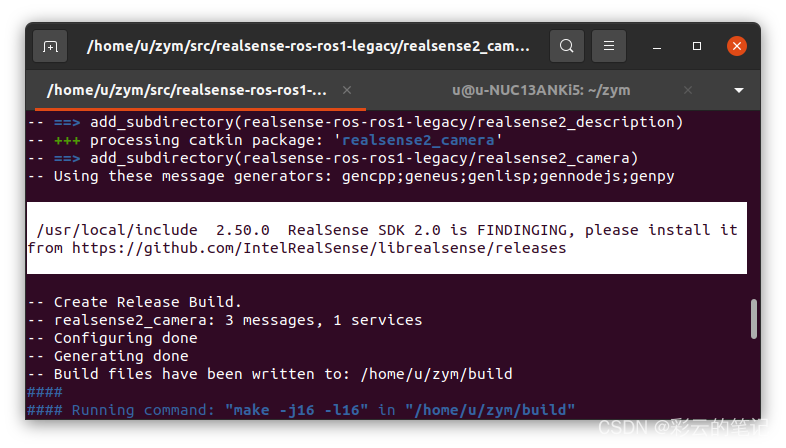
源码安装的旧版本在/usr/local
set(realsense2_DIR /usr/local/)
find_package(realsense2 2.50.0 REQUIRED)
message( "\n\n ${realsense2_INCLUDE_DIR} ${realsense2_VERSION} RealSense SDK 2.0 is FINDINGING, please install it from https://github.com/IntelRealSense/librealsense/releases\n\n")
--------------
set(realsense2_DIR /usr)
find_package(realsense2 2.54 REQUIRED)
message( "\n\n ${realsense2_INCLUDE_DIR} ${realsense2_VERSION} RealSense SDK 2.0 is FINDINGING, please install it from https://github.com/IntelRealSense/librealsense/releases\n\n")
------------------------
https://www.cnblogs.com/huaxiaforming/p/7073128.html
安装
ubuntu下常用的库安装位置有两个:/usr和/usr/local,通过apt-get安装的库位于/usr,自己make install的库通常位于/usr/local下.安装位置通常按照include,lib,share文件夹组织,对于开发者来说应该不会陌生.include和lib分别存放头文件和库,而cmake的模块文件通常在share里.如果我们要将库安装到自己指定的位置只需要在cmake时给CMAKE_INSTALL_PREFIX赋值即可,cmake -DCMAKE_INSTALL_PREFIX=/usr/my,这样库就安装到/usr/my下了,在使用时find_package是找不到这个位置的,需要指定模块的位置才能正常使用.
使用
find_package()命令的原理是找到模块文件,并从中提取变量,之后我们就能正常使用OpenCV_LIB等变量了.
模块文件后缀是cmake,通常位于/usr/share或/usr/local/share下,cmake默认搜索的也是这两个位置
尝试以下cmakelist,将搜索出系统中所有opencv模块的位置以及版本
PROJECT(test)CMAKE_MINIMUM_REQUIRED(VERSION 2.8)FIND_PACKAGE(OpenCV 8 REQUIRED)#尝试找一个不存在的版本通常我们需要使用特定版本,在cmake之前赋值OpenCV_DIR变量为自己需要的opencv版本的模块位置即可
PROJECT(test)CMAKE_MINIMUM_REQUIRED(VERSION 2.8)SET(OpenCV_DIR /usr/share/OpenCV/)#这里写自己需要的opencv版本的模块位置FIND_PACKAGE(OpenCV REQUIRED)MESSAGE(${OpenCV_VERSION})#输出看一下MESSAGE(${OpenCV_DIR})相关文章:
ubuntu下同时安装和使用不同版本的库 librealsense
apt 安装的最新版本在/usr 源码安装的旧版本在/usr/local set(realsense2_DIR /usr/local/) find_package(realsense2 2.50.0 REQUIRED) message( "\n\n ${realsense2_INCLUDE_DIR} ${realsense2_VERSION} RealSense SDK 2.0 is FINDINGING, please install it from…...

openEuler操作系统下静默安装Oracle19c
在openEuler-23.09上安装Oracle19c,创建非容器数据库实例(含静默安装) 操作系统版本 openEuler-23.09-x86_64-dvd.iso ,安装步骤此处省略。。。 最常用且直接的方法来查看openEuler的版本号是查看/etc/os-release文件 [root@openEuler ~]$ cat /etc/os-release NAME="…...

Linux CPU常见命令行详解
在Linux系统中,命令行是管理和监控系统资源的重要工具。特别是当我们需要了解CPU的状态、性能和利用率时,一系列命令行工具就显得尤为重要。本文将详细介绍Linux中与CPU相关的常见命令行工具及其使用方法,帮助大家更好地理解和利用这些工具来…...

防止更新或保存 Laravel 模型
例如,创建模型后,我不希望任何人能够再次更新该记录。相反,它应该被全新的记录覆盖并存档。 这是一个简单的特征,您可以在模型上使用它来禁用更新: trait PreventsUpdating {public static function bootPreventsUpd…...

Cadence:Conformal系列形式验证工具
Conformal 工具最早由Verplex Systems开发。Verplex是一家专注于形式验证工具开发的公司,其核心产品是Conformal等效性检查工具。由于其技术的先进性和市场需求,Verplex的 Conformal工具迅速在半导体行业内获得了认可。 2003 年,Cadence Desi…...
一般人不要学Python?一般人怎么学Python!!
关于“建议一般人真的不要学Python”这一观点,我认为这是一个过于绝对的说法。实际上,Python作为一种流行的编程语言,具有许多优点,适合不同背景和需求的人学习。以下是一些反驳这一观点的理由: 易于学习和理解&#x…...

微服务架构中间件安装部署
微服务架构中间件安装部署 jdk安装 安装包jdk-8u144-linux-x64.tar.gz 先检查系统原版本的jdk并卸载 rpm -qa | grep java 显示信息如下: tzdata-java-2014g-1.el6.noarch java-1.6.0-openjdk-1.6.0.0-11.1.13.4.el6.x86_64 java-1.7.0-openjdk-1.7.0.65-2.5.1.2.…...

车辆数据的提取、定位和融合(其一 共十二篇)
第一篇: System Introduction 第二篇:State of the Art 第三篇:localization 第四篇:Submapping and temporal weighting 第五篇:Mapping of Point-shaped landmark data 第六篇:Clustering of landma…...

Vue3组件通信全解析:利用props、emit、provide/inject跨层级传递数据,expose与ref实现父子组件方法调用
文章目录 一、父组件数据传递N个层级的子组件vue3 provide 与 injectA组件名称 app.vueB组件名称 provideB.vueC组件名称 provideCSetup.vue 二、使用v-model指令实现父子组件的双向绑定父组件名称 app.vue子组件名称 v-modelSetup.vue 三、父组件props向子组件传值子组件 prop…...

华为---OSPF被动接口配置(四)
9.4 OSPF被动接口配置 9.4.1 原理概述 OSPF被动接口也称抑制接口,成为被动接口后,将不会接收和发送OSPF报文。如果要使OSPF路由信息不被某一网络中的路由器获得且使本地路由器不接收网络中其他路由器发布的路由更新信息,即已运行在OSPF协议…...

前端将Markdown文本转换为富文本显示/编辑,并保存为word文件
参考:https://www.wangeditor.com/ https://blog.csdn.net/weixin_43797577/article/details/138854324 插件: markdown-it traptitech/markdown-it-katex markdown-it-link-attributes highlight.js wangeditor/editor wangeditor/editor-for-vue html…...

git-shortlog详解
作用 git-shortlog - Summarize git log output 语法 git shortlog [<options>] [<revision-range>] [[--] <path>…] git log --prettyshort | git shortlog [<options>] 功能描述 Summarizes git log output in a format suitable for inclus…...
通过MATLAB实现PID控制器,积分分离控制器以及滑模控制器
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 通过MATLAB实现PID控制器,积分分离控制器以及滑模控制器。通过对比三个算法可知,采用滑模控制算法,其具有最快的收敛性能,较强的鲁棒性&…...

Node.js 渲染三维模型并导出为图片
Node.js 渲染三维模型并导出为图片 1. 前言 本文将介绍如何在 Node.js 中使用 Three.js 进行 3D 模型渲染。通过结合 gl 和 canvas 这两个主要依赖库,我们能够在服务器端实现高效的 3D 渲染。这个方法解决了在服务器端生成和处理 3D 图形的需求,使得可…...
Win11下安装VS2022失败的解决办法
前几天我把我的HP Z840的操作系统换成了Win11,在重装VS2022时遇到了麻烦,提示无法安装 Microsoft.VisualStudio.Devenv.Msi。 查看安装日志提示:Could not write value devenv.exe to key \SOFTWARE\Microsoft\Internet Explorer\Main\Featur…...
动态规划:基本概念
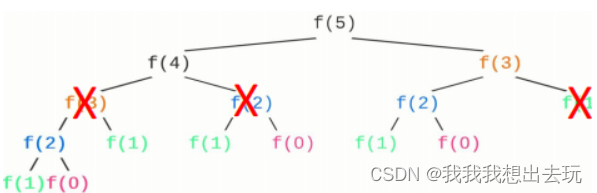
Dynamic Programming 动态规划(Dynamic Programming, DP) 是一种算法设计技巧,通常用来解决具有重叠子问题和最优子结构性质的问题。它通过将问题分解为更小的子问题,逐步解决这些子问题并将结果存储起来,以避免重复计…...

小山菌_代码随想录算法训练营第二十九天| 455. 分发饼干 、376. 摆动序列、53. 最大子序和
455. 分发饼干 文档讲解:代码随想录.分发饼干 视频讲解:贪心算法,你想先喂哪个小孩?| LeetCode:455.分发饼干 状态:已完成 代码实现 class Solution { public:int findContentChildren(vector<int>&…...

快手可灵大模型开放视频续写功能,可生成最长约3分钟视频
6月21日,可灵再度进化,正式推出图生视频功能,支持用任意静态图像生成5s视频,并且可搭配不同的文本内容,实现丰富的视觉叙事 。 同时,可灵还发布了业内领先的视频续写功能,可为已生成的视频&…...

【代码随想录】【算法训练营】【第45天】 [198]打家劫舍 [213]打家劫舍II [337]打家劫舍III
前言 思路及算法思维,指路 代码随想录。 题目来自 LeetCode。 day 45,周五,坚持不了一点~ 题目详情 [198] 打家劫舍 题目描述 198 打家劫舍 解题思路 前提: 思路: 重点: 代码实现 C语言 虚拟头…...
python安装目录文件说明----Dlls文件夹
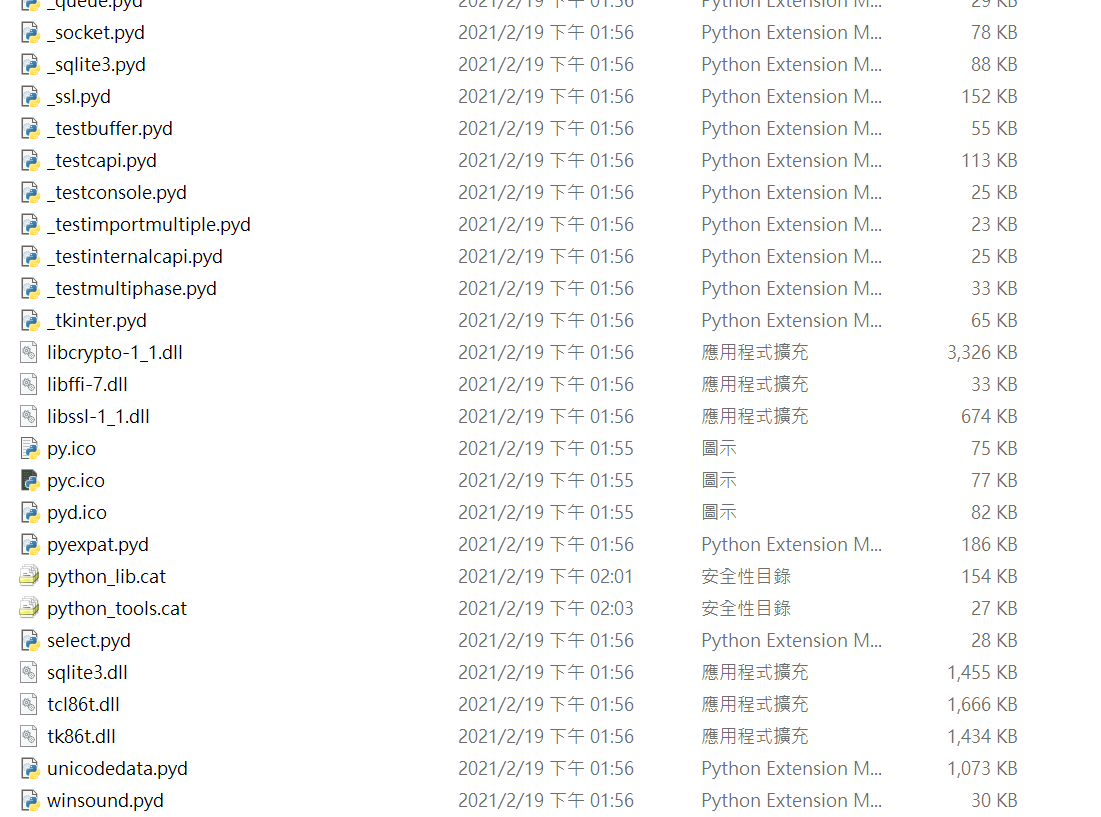
在Python的安装目录下,通常会有一个DLLs文件夹,它是Python标准库的一部分。这个文件夹包含了一些动态链接库(Dynamic Link Libraries,DLL),这些库提供了Python解释器和标准库的一些关键功能。以下是对这个文…...
-----深度优先搜索(DFS)实现)
c++ 面试题(1)-----深度优先搜索(DFS)实现
操作系统:ubuntu22.04 IDE:Visual Studio Code 编程语言:C11 题目描述 地上有一个 m 行 n 列的方格,从坐标 [0,0] 起始。一个机器人可以从某一格移动到上下左右四个格子,但不能进入行坐标和列坐标的数位之和大于 k 的格子。 例…...

多模态商品数据接口:融合图像、语音与文字的下一代商品详情体验
一、多模态商品数据接口的技术架构 (一)多模态数据融合引擎 跨模态语义对齐 通过Transformer架构实现图像、语音、文字的语义关联。例如,当用户上传一张“蓝色连衣裙”的图片时,接口可自动提取图像中的颜色(RGB值&…...

Neo4j 集群管理:原理、技术与最佳实践深度解析
Neo4j 的集群技术是其企业级高可用性、可扩展性和容错能力的核心。通过深入分析官方文档,本文将系统阐述其集群管理的核心原理、关键技术、实用技巧和行业最佳实践。 Neo4j 的 Causal Clustering 架构提供了一个强大而灵活的基石,用于构建高可用、可扩展且一致的图数据库服务…...
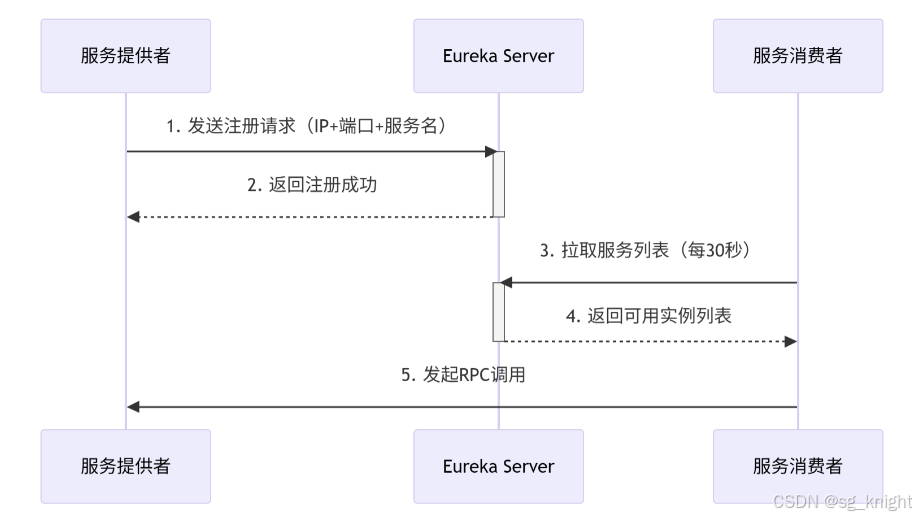
Springcloud:Eureka 高可用集群搭建实战(服务注册与发现的底层原理与避坑指南)
引言:为什么 Eureka 依然是存量系统的核心? 尽管 Nacos 等新注册中心崛起,但金融、电力等保守行业仍有大量系统运行在 Eureka 上。理解其高可用设计与自我保护机制,是保障分布式系统稳定的必修课。本文将手把手带你搭建生产级 Eur…...

MySQL中【正则表达式】用法
MySQL 中正则表达式通过 REGEXP 或 RLIKE 操作符实现(两者等价),用于在 WHERE 子句中进行复杂的字符串模式匹配。以下是核心用法和示例: 一、基础语法 SELECT column_name FROM table_name WHERE column_name REGEXP pattern; …...
分布式增量爬虫实现方案
之前我们在讨论的是分布式爬虫如何实现增量爬取。增量爬虫的目标是只爬取新产生或发生变化的页面,避免重复抓取,以节省资源和时间。 在分布式环境下,增量爬虫的实现需要考虑多个爬虫节点之间的协调和去重。 另一种思路:将增量判…...

基于Java Swing的电子通讯录设计与实现:附系统托盘功能代码详解
JAVASQL电子通讯录带系统托盘 一、系统概述 本电子通讯录系统采用Java Swing开发桌面应用,结合SQLite数据库实现联系人管理功能,并集成系统托盘功能提升用户体验。系统支持联系人的增删改查、分组管理、搜索过滤等功能,同时可以最小化到系统…...
与常用工具深度洞察App瓶颈)
iOS性能调优实战:借助克魔(KeyMob)与常用工具深度洞察App瓶颈
在日常iOS开发过程中,性能问题往往是最令人头疼的一类Bug。尤其是在App上线前的压测阶段或是处理用户反馈的高发期,开发者往往需要面对卡顿、崩溃、能耗异常、日志混乱等一系列问题。这些问题表面上看似偶发,但背后往往隐藏着系统资源调度不当…...
【VLNs篇】07:NavRL—在动态环境中学习安全飞行
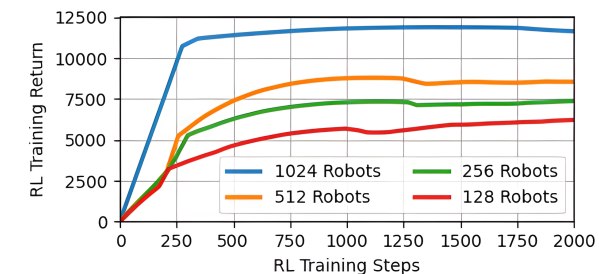
项目内容论文标题NavRL: 在动态环境中学习安全飞行 (NavRL: Learning Safe Flight in Dynamic Environments)核心问题解决无人机在包含静态和动态障碍物的复杂环境中进行安全、高效自主导航的挑战,克服传统方法和现有强化学习方法的局限性。核心算法基于近端策略优化…...
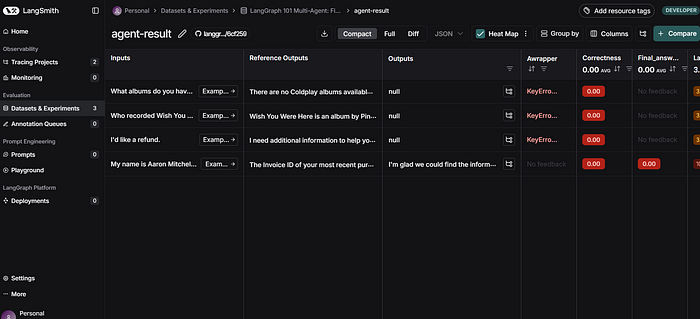
使用LangGraph和LangSmith构建多智能体人工智能系统
现在,通过组合几个较小的子智能体来创建一个强大的人工智能智能体正成为一种趋势。但这也带来了一些挑战,比如减少幻觉、管理对话流程、在测试期间留意智能体的工作方式、允许人工介入以及评估其性能。你需要进行大量的反复试验。 在这篇博客〔原作者&a…...