基于强化学习的目标跟踪论文合集
文章目录
- 2020
- UAV Maneuvering Target Tracking in Uncertain Environments Based on Deep Reinforcement Learning and Meta-Learning
- UAV Target Tracking in Urban Environments Using Deep Reinforcement Learning
- 2021
- Research on Vehicle Dispatch Problem Based on Kuhn-Munkres and Reinforcement Learning Algorithm
- Multi-Agent Reinforcement Learning Aided Intelligent UAV Swarm for Target Tracking
- Active Learning for Deep Visual Tracking
- 2022
- Remote Sensing Object Tracking With Deep Reinforcement Learning Under Occlusion
- DIMBA: discretely masked black‑box attack in single object tracking
- Real-time Multi-person Pose Tracking Method Using Deep Reinforcement Learning
- 2023
- Deep Reinforcement Learning for Vision-Based Navigation of UAVs in Avoiding Stationary and Mobile Obstacles
- SRL-TR2: A Safe Reinforcement Learning Based TRajectory TRacker Framework
- Adaptive chaotic sampling particle filter to handle occlusion and fast motion in visual object tracking
2020
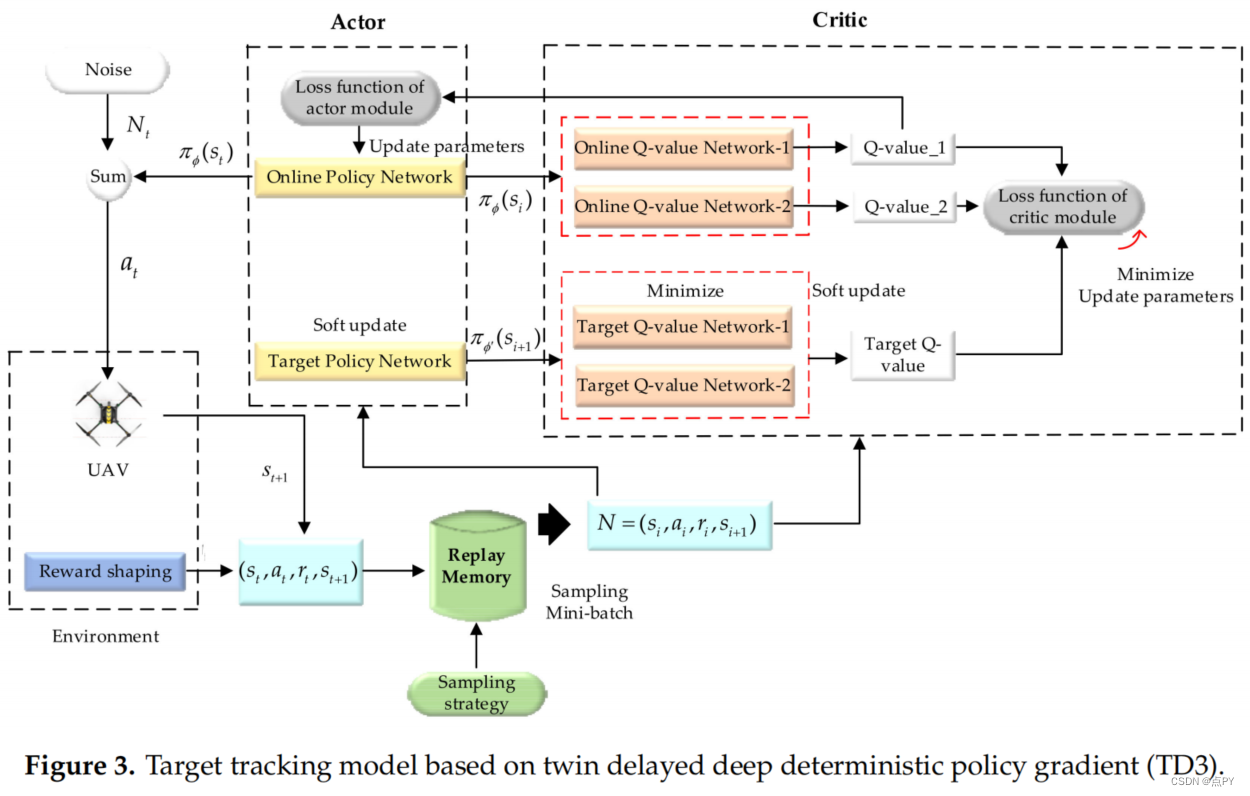
UAV Maneuvering Target Tracking in Uncertain Environments Based on Deep Reinforcement Learning and Meta-Learning
摘要: 本文结合深度强化学习(DRL)与元学习,提出了一种新颖的方法,名为元双延迟深度确定性政策梯度(Meta-TD3),实现无人机(UAV)的控制,允许无人机快速跟踪目标环境的目标是不确定的。这种方法可应用于各种情况,如野生动物保护、紧急援助和遥感。我们考虑一个多任务经验重放缓冲区为DRL算法的多任务学习提供数据,并结合元学习开发了一种多任务强化学习更新方法,以确保强化学习的泛化能力。与现有的深度确定性策略梯度(DDPG)和双延迟深度确定性策略梯度(TD3)算法相比,实验结果表明,Meta-TD3算法在收敛值和收敛速度方面都取得了很大的提高。在无人机目标跟踪问题中,Meta-TD3只需要几个步骤来训练,使无人机能够快速适应新的目标运动模式,并保持更好的跟踪效果。
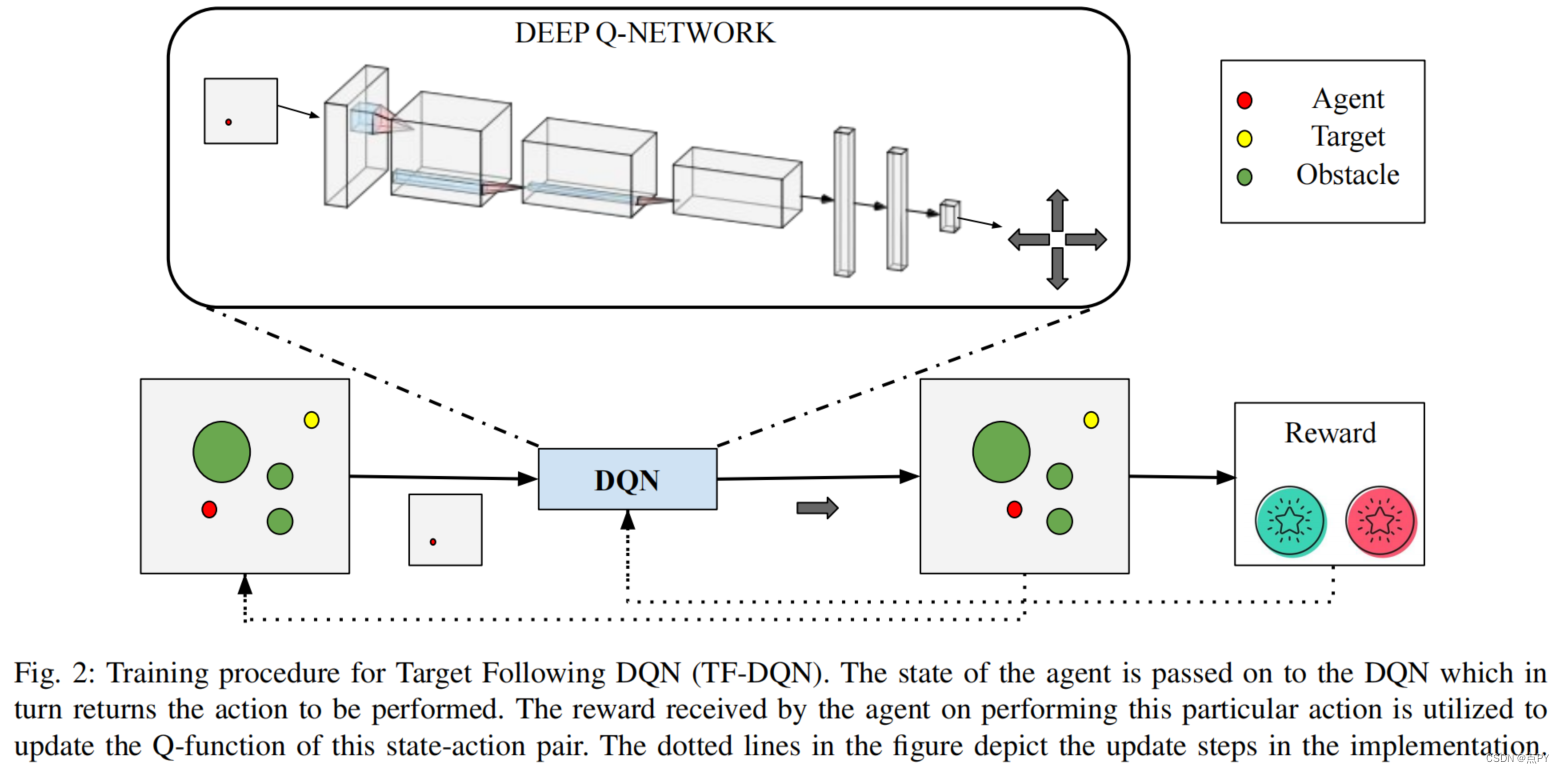
UAV Target Tracking in Urban Environments Using Deep Reinforcement Learning
code: https://github.com/sarthak268/Target-Tracking-Simulator
摘要: 由于视野有限、障碍物能见度障碍、目标运动不确定,无人机在城市环境中进行持续目标跟踪是一项困难的任务。车辆需要在三维空间中进行智能规划,以使目标可见性最大化。在本文中,我们介绍了一种基于深度q网络(TF-DQN)的深度强化学习技术,具有课程训练框架,用于无人机在存在障碍物和目标运动不确定性的情况下持续跟踪目标。通过多次仿真实验,对该算法进行了定性和定量的评价。结果表明,无人机在不同的环境中持续跟踪目标,同时在训练好的环境和看不见的环境中避开障碍物。
2021
Research on Vehicle Dispatch Problem Based on Kuhn-Munkres and Reinforcement Learning Algorithm
摘要: 随着人工智能和5G通信技术的发展,自动驾驶汽车的可实现性越来越大。城市交通汽车提供出租车服务,有效降低了劳动力成本,实现了智能交通系统。结合5G技术的车辆系统可以快速获取交通信息,为车辆调度提供了决策依据。因此,有必要开发一种有效的方法来分配和分配这些车辆,以最大化系统的潜在收入。本文基于2016年纽约市绿色出租车数据的出行数据进行了车辆调度研究,并提出了两种调度方法。首先,我们将调度问题作为一个最大权值匹配问题。然后,利用库恩和Munkres(KM)算法,提出了一种以减少乘客等候时间为目标的基于距离调度方法。最后,我们用马尔可夫决策过程(MDP)制定了车辆调度决策,并引入了一种基于强化学习(RL)的调度方法,该方法结合了RL算法和KM算法来解决调度问题,使潜水员的长期收入最大化。实验将KM算法与全置换算法进行了比较,证明了KM算法的有效性。介绍了基于远程的调度方法和基于rl的调度方法在小型调度和大规模调度中的性能。首先,我们将调度问题作为一个最大权值匹配问题。然后,利用库恩和Munkres(KM)算法,提出了一种以减少乘客等候时间为目标的基于距离调度方法。最后,我们用马尔可夫决策过程(MDP)制定了车辆调度决策,并引入了一种基于强化学习(RL)的调度方法,该方法结合了RL算法和KM算法来解决调度问题,使潜水员的长期收入最大化。实验将KM算法与全置换算法进行了比较,证明了KM算法的有效性。介绍了基于远程的调度方法和基于rl的调度方法在小型调度和大规模调度中的性能。

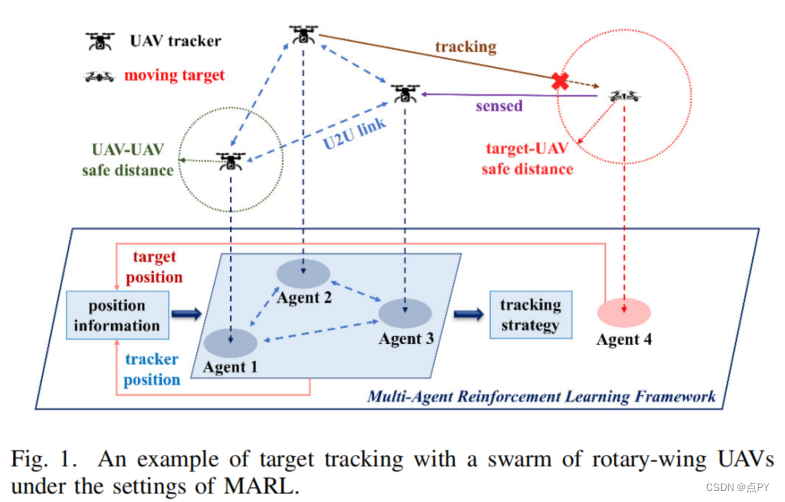
Multi-Agent Reinforcement Learning Aided Intelligent UAV Swarm for Target Tracking
摘要: 过去几年,无人机(uav)被广泛应用于目标跟踪的区域监测和打击。大多数现有的目标跟踪方法依赖于由所装备的相机获得的目标运动帧,或理想地假设一个预先设定的目标轨迹。但在实际应用中,无人机不能事先完全知道目标的真实轨迹,目标也可以根据环境智能地调整其飞行策略。此外,单架无人机有限的飞行性能以及信息捕获和处理能力,难以满足高跟踪成功率的要求。针对上述问题,本文提出了一种端到端协同多智能体强化学习(MARL)方案,该方案使无人机能够根据目标过去和当前的状态,做出协同目标跟踪的智能飞行决策。为了降低功耗,延长无人机跟踪系统的使用寿命,介绍了推进功耗模型和节能策略。此外,为了进一步提高检测的覆盖范围,在跟踪算法中引入了空间信息熵。仿真结果表明,我们提出的算法在平均事件奖励方面优于深度强化学习基线,同时在跟踪成功率、省电效率和检测覆盖率方面也具有较高的性能。
Active Learning for Deep Visual Tracking
摘要: 卷积神经网络(CNNs)近年来已成功地应用于单目标跟踪任务。一般来说,训练一个深度CNN模型需要大量标记的训练样本,这些样本的数量和质量直接影响训练模型的表征能力。然而,这种方法在实践中是限制性的,因为手动标记如此大量的训练样本是耗时的和非常昂贵的。在本文中,我们提出了一种深度视觉跟踪的主动学习方法,它选择和标注未标记的样本来训练深度cnn模型。在主动学习的指导下,基于训练好的深度cnn模型的跟踪器可以在降低标记成本的同时实现具有竞争力的跟踪性能。更具体地说,为了确保所选样本的多样性,我们提出了一种基于多帧协作的主动学习方法来选择那些应该标注和需要标注的训练样本。同时,考虑到所选样本的代表性,我们采用基于平均最近邻距离的最近邻鉴别方法来筛选孤立的样本和低质量的样本。因此,基于我们的方法选择的训练样本子集只需要一个给定的预算来保持整个样本集的多样性和代表性。此外,我们采用了一个Tversky损失来改进我们的跟踪器的边界盒估计,这可以确保跟踪器实现更准确的目标状态。大量的实验结果证实,我们的基于主动学习的跟踪器(ALT)在7个最具挑战性的评估基准上,与最先进的跟踪器相比,实现了具有竞争力的跟踪精度和速度。
论文的贡献
- 我们提出了一种新的主动学习方法来训练样本选择,以训练跟踪器中的深度cnn模型。该方法将在给定的预算下选择最多样化和最具代表性的训练样本,在大大降低标记这些训练样本的同时,确保可接受的跟踪性能的成本。
- 考虑到视频序列中移动目标的时间关系,我们提出了使用多帧合作策略的主动学习方法来选择这些训练样本,以确保所选样本的多样性。
- 此外,我们采用基于平均最近邻距离的最近邻识别方法对孤立样本进行筛选,保证所选训练样本的代表性,有效保证训练后的深度cnn模型的鲁棒性。
- 此外,我们采用Tversky损失来改进所提出的跟踪器的边界盒估计策略,使我们的ALT跟踪器能够获得更准确的目标状态。

2022
Remote Sensing Object Tracking With Deep Reinforcement Learning Under Occlusion
摘要: 目标跟踪是遥感领域空间地球观测的重要研究方向。虽然现有的基于相关滤波器和基于深度学习(DL)的目标跟踪算法取得了很大的成功,但对于目标遮挡问题仍然不能令人满意。由于背景的复杂变化而造成的遮挡和跟踪镜头的偏差,导致物体信息丢失,从而导致检测的遗漏。传统上,被遮挡下的目标跟踪方法大多采用复杂的网络模型,对被遮挡对象进行重新检测。为了解决这个问题,我们提出了一种新的目标跟踪方法。首先,建立了一个基于深度强化学习(DRL)的动作决策-遮挡处理网络(AD-OHNet),以实现遮挡下目标跟踪的低计算复杂度。其次,采用时空背景、物体外观模型和运动矢量来提供遮挡信息,从而驱动完全遮挡下强化学习的动作,有助于在保持速度的同时提高跟踪的准确性。最后,在吉林-1商业遥感卫星的波哥大、香港和圣地亚哥的三个遥感视频数据集上,对提出的AD-OHNet进行了评估。这些视频数据集都有低空间分辨率、背景杂波和小物体等共同问题。在三个视频数据集上的实验结果验证了该跟踪器的有效性和有效性。
论文的贡献:
- 首先,采用DRL的框架,在不附加网络结构的情况下进行目标跟踪,以提高算法在遮挡条件下的速度。DRL中的状态和动作参数可以与目标跟踪中的连续帧信息相关联。据我们所知,这是第一次使用DRL的想法来解决目标跟踪中的遮挡问题。
- 其次,我们提出了一种新的方法,通过在跟踪任务中使用目标遮挡信息来驱动动作,这与传统的逐次跟踪检测方法不同。时间和空间上下文之间的连续帧遥感序列,对象外观模型学习网络,和运动向量从动作参数在强化学习采用提供遮挡信息,显著提高了对象跟踪算法的鲁棒性和精度。
- 其次,我们提出了一种新的方法,通过在跟踪任务中使用目标遮挡信息来驱动动作,这与传统的逐次跟踪检测方法不同。时间和空间上下文之间的连续帧遥感序列,对象外观模型学习网络,和运动向量从动作参数在强化学习采用提供遮挡信息,显著提高了对象跟踪算法的鲁棒性和精度。

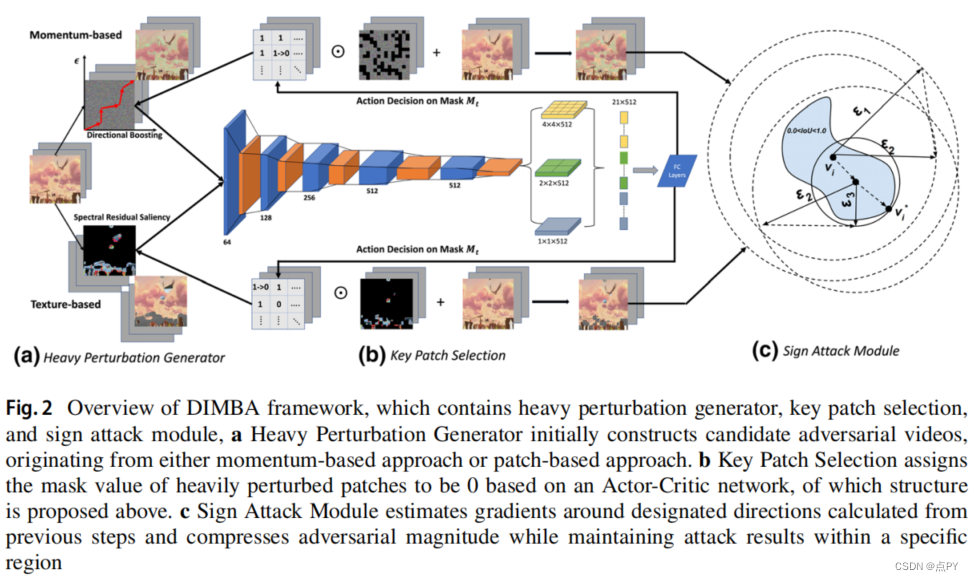
DIMBA: discretely masked black‑box attack in single object tracking
摘要: 对抗性攻击可以迫使一个基于cnn的模型通过巧妙地操纵人类难以察觉的输入来产生不正确的输出。探索这种扰动可以帮助我们更深入地理解神经网络的脆弱性,并为对抗各种对手的深度学习提供鲁棒性。尽管广泛的研究集中在图像、音频和自然语言处理的鲁棒性上,但对视觉物体跟踪的敌对例子——特别是以黑盒的方式——却相当缺乏。在本文中,我们提出了一种新的对抗性攻击方法,在黑盒设置下产生单个目标跟踪的噪声,其中仅在跟踪序列的初始化帧上添加扰动,从整个视频剪辑的角度来看是模糊的。特别地,我们将我们的算法分成三个组件,并利用强化学习来精确地定位重要的帧补丁,同时减少不必要的计算查询开销。与现有的技术相比,我们的方法需要更少的时间来干扰视频,但可以操纵竞争性能,甚至是更好的对抗性性能。我们在长期和短期数据集上测试了我们的算法,包括OTB100、VOT2018、UAV123和LaSOT。大量的实验证明了我们的方法在三种主流类型的跟踪器上的有效性:识别、基于暹罗的和基于强化学习的跟踪器。
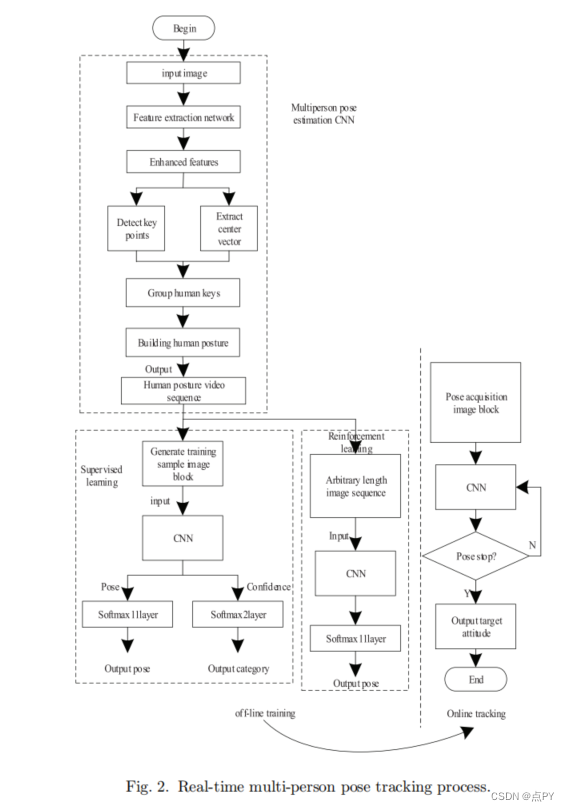
Real-time Multi-person Pose Tracking Method Using Deep Reinforcement Learning
摘要: 为了解决现有方法中由许多识别对象导致的跟踪精度低的问题,我们提出了一种使用深度强化学习的实时多人姿态跟踪方法。首先,利用卷积神经网络(CNN)对网格模式下的人关键点和中心向量进行预测,根据中心向量指向人中心,根据人关键点到人中心的距离对人关键点进行分组,完成多人体姿态估计,得到人体姿态序列图。然后,将人体位姿序列图输入到深度强化学习网络中,通过监督学习和训练阶段输出位姿标签和类别标签。将在强化学习和训练阶段获得的最佳位姿跟踪策略应用于在线跟踪。最后,利用CNN预测姿态的矩形帧位置,而不是预测目标姿态,并在姿态停止时完成跟踪。此时,矩形帧位置是多人姿态跟踪的结果。结果表明,该方法的最大期望平均重叠度(EAO)为0.53。当位置分量阈值的均方根误差(RMSE)达到8时,准确率一直稳定在0.98%。因此,该方法具有较高的跟踪精度。未来可应用于智能家居场景,实现智能家居人体姿态跟踪,生态识别人体危险姿态,确保居民的生命安全。
2023
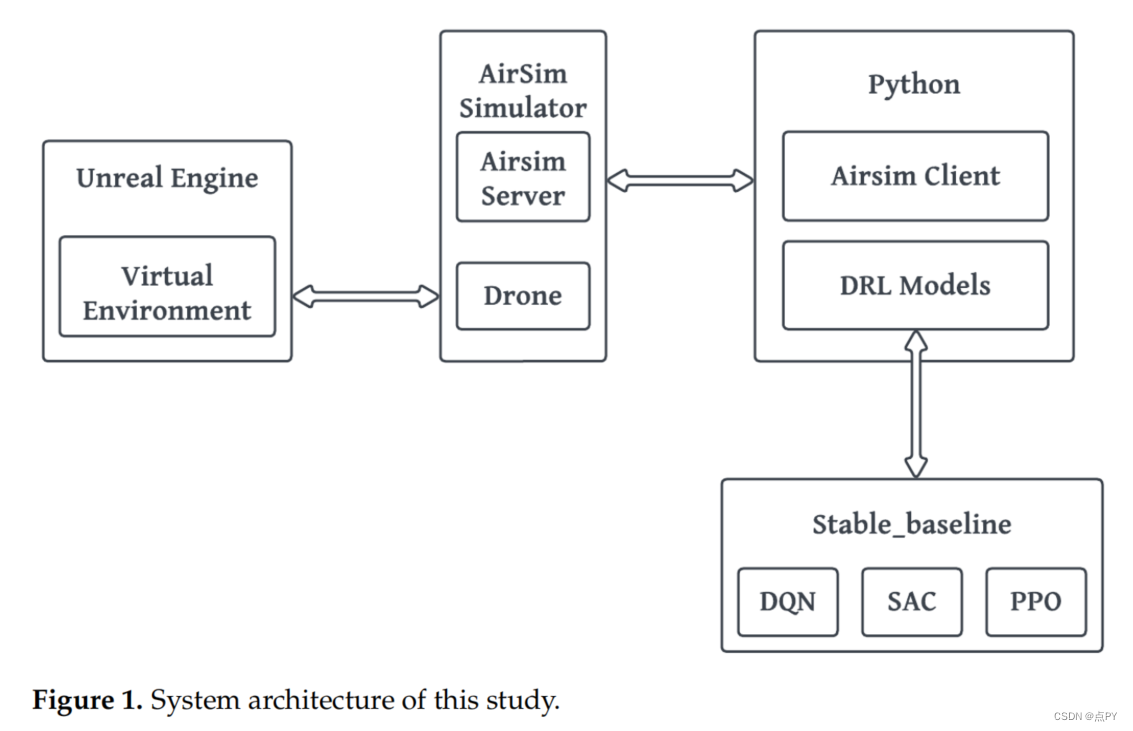
Deep Reinforcement Learning for Vision-Based Navigation of UAVs in Avoiding Stationary and Mobile Obstacles
摘要: 无人机(uav),也被称为无人机,近年来有了很大的进步。无人机的使用方式有很多种,包括交通运输、摄影、气候监测和救灾。其原因是它们在所有操作中都具有很高的效率和安全性。虽然无人机的设计力求完美,但它还没有完美无缺。在探测和预防碰撞方面,无人机仍然面临着许多挑战。在此背景下,本文描述了一种方法,开发无人机系统自主操作,不需要人工干预。本研究应用强化学习算法训练无人机,在仅基于图像数据的离散和连续的动作空间中自动避免障碍。本研究的新颖之处在于,利用不同的强化学习技术,对无人机的障碍物探测和躲避的优势、局限性和未来的研究方向进行了综合评估。本研究比较了三种不同的强化学习策略,即深度q网络(DQN)、近端策略优化(PPO)和软行动者评论家(SAC),它们可以帮助避免障碍,包括静止和移动;然而,这些策略在无人机上更为成功。该实验是在AirSim提供的虚拟环境中进行的。使用虚幻引擎4,创建了各种训练和测试场景,以理解和分析无人机的RL算法的行为。根据训练结果可知,SAC的性能优于其他两种算法。PPO是所有算法中最不成功的,这表明策略上的算法在具有动态参与者的广泛三维环境中是无效的。DQN和SAC,两种非策略算法,产生了令人鼓舞的结果。然而,由于其有限的离散作用空间,DQN在狭窄的路径和扭曲方面可能不如SAC有利。关于进一步的发现,当涉及到自主无人机时,DQN和SAC等非策略算法比PPO等非策略算法表现得更有效。这些发现可能对未来开发更安全、更高效的无人机具有实际意义。
SRL-TR2: A Safe Reinforcement Learning Based TRajectory TRacker Framework
摘要: 本文旨在解决一种基于强化学习方法的自动驾驶车辆的轨迹跟踪控制问题。现有的强化学习方法在现实世界中在安全关键任务上的成功应用有限,主要是由于两个挑战: 1)模拟到真实的转移;2)闭环稳定性和安全问题。在本文中,我们提出了一个演员-评论家风格的框架SRL-TR2,其中基于rl的跟踪跟踪器在安全约束下进行训练,然后部署到全尺寸车辆作为横向控制器。为了提高泛化能力,我们采用了一个轻量级的适配器状态和动作空间对齐(SASA)来建立仿真与现实之间的映射关系。为了解决安全问题,当安全约束不得到满足时,我们利用专家策略来接管控制。因此,我们在培训过程中进行了安全的探索,并提高了政策的稳定性。实验表明,在12 km/h~18 km/h的模拟场景下,在12 km/h~18 km/h的情况下,以平均运行时间小于10ms/步,平均横向误差小于0.1 m完成现场测试。

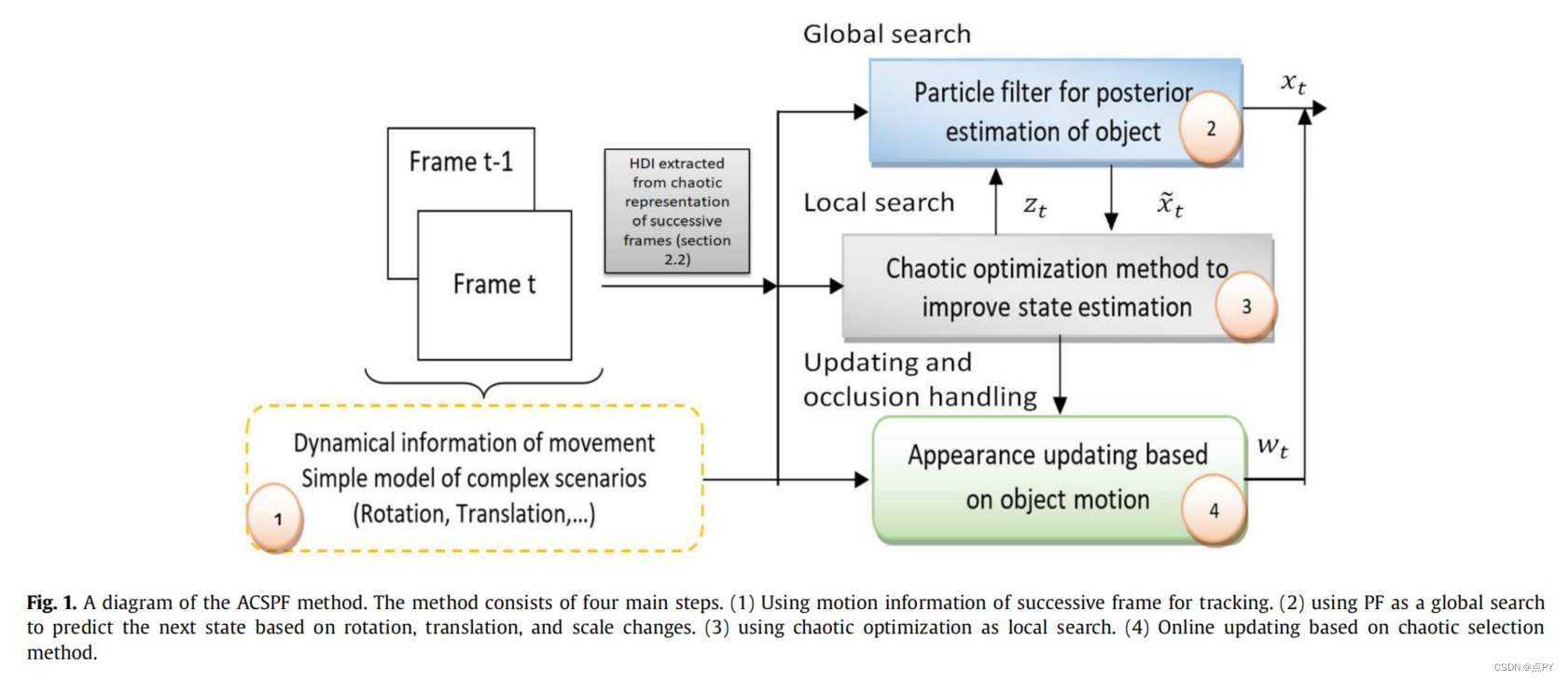
Adaptive chaotic sampling particle filter to handle occlusion and fast motion in visual object tracking
摘要:本文提出了一种新的视觉目标跟踪粒子滤波方法,可以有效地处理遮挡和快速运动。该方法采用混沌局部搜索来模拟不规则运动,与普通的粒子滤波方法相比,该方法需要更少的粒子数量。此外,采用一种新的混沌采样方法将粒子强制施加到具有最大多样性似然函数的特定区域,并引入基于状态空间重建的动态信息直方图来表示连续帧上的运动。最后,提出了一种新的区分遮挡和视野外外观更新的准则。我们提出了数值实验证明,所开发的框架优于其他最先进的方法处理不规则运动和不确定性。根据BOBOT、OTB100、OTB2013和VOT2018的研究结果,与基于深度和强化学习、相关滤波器和暹罗神经网络等方法的传统方法相比,提出的策略更接近真实目标状态,提高了跟踪精度。最后,我们解析地证明了该方法的收敛性。
相关文章:
基于强化学习的目标跟踪论文合集
文章目录 2020UAV Maneuvering Target Tracking in Uncertain Environments Based on Deep Reinforcement Learning and Meta-LearningUAV Target Tracking in Urban Environments Using Deep Reinforcement Learning 2021Research on Vehicle Dispatch Problem Based on Kuhn-…...
高质量AIGC/ChatGPT/大模型资料分享
2023年要说科技圈什么最火爆,一定是ChatGPT、AIGC(人工智能生成内容)和大型语言模型。这些技术前沿如同科技世界的新潮流,巨浪拍岸,引发各界关注。ChatGPT的互动性和逼真度让人们瞠目,它能与用户展开流畅对…...

使用Python进行Socket接口测试
大家好,在现代软件开发中,网络通信是不可或缺的一部分。无论是传输数据、获取信息还是实现实时通讯,都离不开可靠的网络连接和有效的数据交换机制。而在网络编程的基础中,Socket(套接字)技术扮演了重要角色…...

C++编程逻辑讲解step by step:存折和信用卡类。
题目 存折和信用卡类,信用卡是一种存折,可以透支,可以存款。 代码 #include<iostream> #include<string> using namespace std; class passbook {public: passbook(string nam,int n,float m) {namenam; numn; balancem; } vo…...
为什么说BIM在机电安装行业是刚需?3D开发工具HOOPS如何促进BIM发展?
在建筑行业中,机电安装是一个复杂且精细的工程领域,它涉及到电气、管道、通风和控制系统等多个方面。随着建筑项目规模的不断扩大和复杂性的增加,传统的二维设计方法已经难以满足现代建筑的需求。正是在这种背景下,BIM技术应运而生…...
SQLite:一个极简使用教程
SQLite是一个轻量级的、文件系统基础的数据库,它被设计为配置简单、易于部署。SQLite数据库存储在一个单一的磁盘文件中,这意味着数据库的创建和维护都非常简单。 1. SQLite特点 轻量级:SQLite不需要一个独立的服务器进程。它是一个嵌入式SQ…...

酒水公司网站品牌建设宣传如何进行
红酒、白酒、啤酒、米酒、精酿啤酒等各种各样的酒水类型和从业公司数量比较多,部分品牌有收藏价值/价格高但销量相对较低,也有部分属于亲民,价格低但销量高,国内外受众广,人员标签不同生意拓展面自然也不同。 无论如何…...

【高级篇】InnoDB引擎深入:核心机制与实战优化(十五)
引言 在探索了MySQL集群与分布式技术之后,我们进入了数据库引擎的核心地带——InnoDB。作为MySQL的默认存储引擎,InnoDB凭借其对事务的支持、行级锁定、高效的恢复机制以及复杂的内存管理,成为众多应用场景的首选。本章,我们将深入InnoDB的内部机制,透彻理解锁管理、事务…...

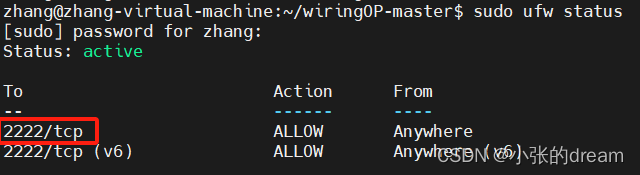
打造安全的Linux环境:关键配置指南
打造安全的Linux环境:关键配置指南 Linux作为一款开源的操作系统,因其稳定性、灵活性和安全性而受到广泛欢迎。然而,即使Linux系统本身设计得相对安全,不正确的配置或管理不善也可能导致安全风险。本文将指导你如何通过关键配置来…...
什么是WABF验证?
今年的618电商购物节已经落下帷幕,在此期间,各大电商平台都普遍迎来了用户访问量、优惠券领取量和交易量的显著增长。在这一时期,业务安全成为电商平台关注的焦点。验证码作为一种常见的业务安全工具,能够有效应对业务安全问题。然…...

CSS3 分页
CSS3 分页 分页是网页设计中常见的一种布局方式,它允许将内容分布在多个页面中,从而提高用户体验和网站的可管理性。CSS3 提供了多种灵活的方式来设计分页,使得开发者能够创建既美观又实用的分页导航。本文将详细介绍如何使用 CSS3 来创建和…...

QWebChannel实现与JS的交互
QWebChannel实现与JS的交互 在利用Qt框架的QWebEngineView进行嵌入浏览器开发时,可以很方便的通过 QWebChannel实现与js的交互,本节内容简单讲解js与Qt应用程序相互发送消息。 最近做项目遇到了这个问题,发现网上的例子不全,很多…...

【漏洞复现】电信网关配置管理系统——命令执行
声明:本文档或演示材料仅供教育和教学目的使用,任何个人或组织使用本文档中的信息进行非法活动,均与本文档的作者或发布者无关。 文章目录 漏洞描述漏洞复现测试工具 漏洞描述 电信网关配置管理系统是一个用于管理和配置电信网关设备的软件系…...
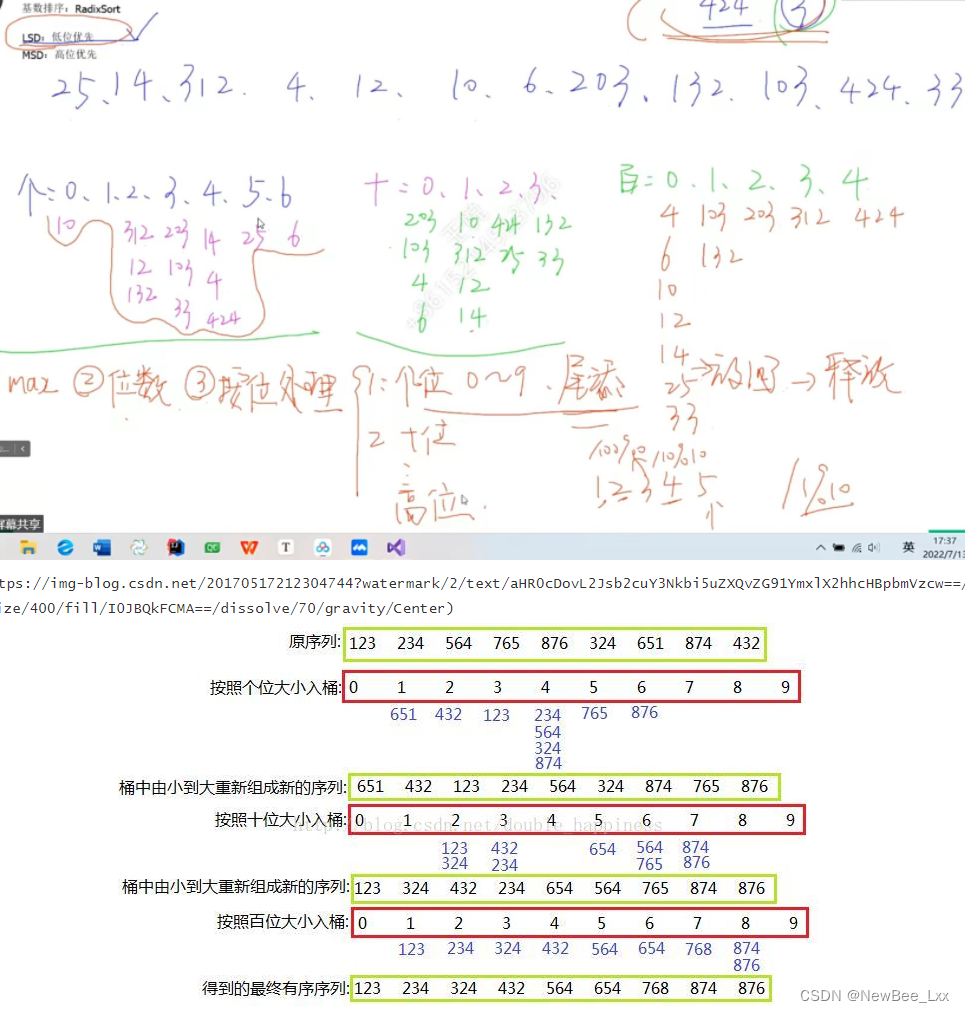
排序算法。
快速排序:QuickSort 选标准值,将比标准值小的放在其左侧,将比标准值大的放在其右侧,左右两部分分别重复以上操作 1.挖坑填补法 拆东墙补西墙 先把第一个数拿出来用temp储存 然后从最后面遍历 找到比temp小的放到第一个位置 然后…...

告别 “屎山” 代码,务必掌握这14 个 SpringBoot 优化小妙招
插: AI时代,程序员或多或少要了解些人工智能,前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家(前言 – 人工智能教程 ) 坚持不懈,越努力越幸运,大家…...

测量无人船作业流程是怎样的?
在一些特殊水域测量作业中,使用有人船进行测量时受阻较多,而采用无人测量船则效率就非常高了,它是解决复杂水域测量问题最直接最有效的方式。那么,测量无人船作业流程是怎样的?下面就让小编来为大家简单介绍一下&#…...

四川赤橙宏海商务信息咨询有限公司抖音开店靠谱吗?
在数字化浪潮席卷全球的今天,电商行业正以前所未有的速度发展。而在这个大潮中,四川赤橙宏海商务信息咨询有限公司凭借其专业的团队和前瞻性的战略眼光,专注于抖音电商服务,为广大商家提供了一站式解决方案,成为了行业…...
解决ssh: connect to host IP port 22: Connection timed out报错(scp传文件指定端口)
错误消息 ssh: connect to host IP port 22: Connection timed out 指出 SSH 客户端尝试连接到指定的 IP 地址和端口号(默认 SSH 端口是 22),但是连接超时了。这意味着客户端没有在预定时间内收到来自服务器的响应。 可能的原因 SSH 服务未…...
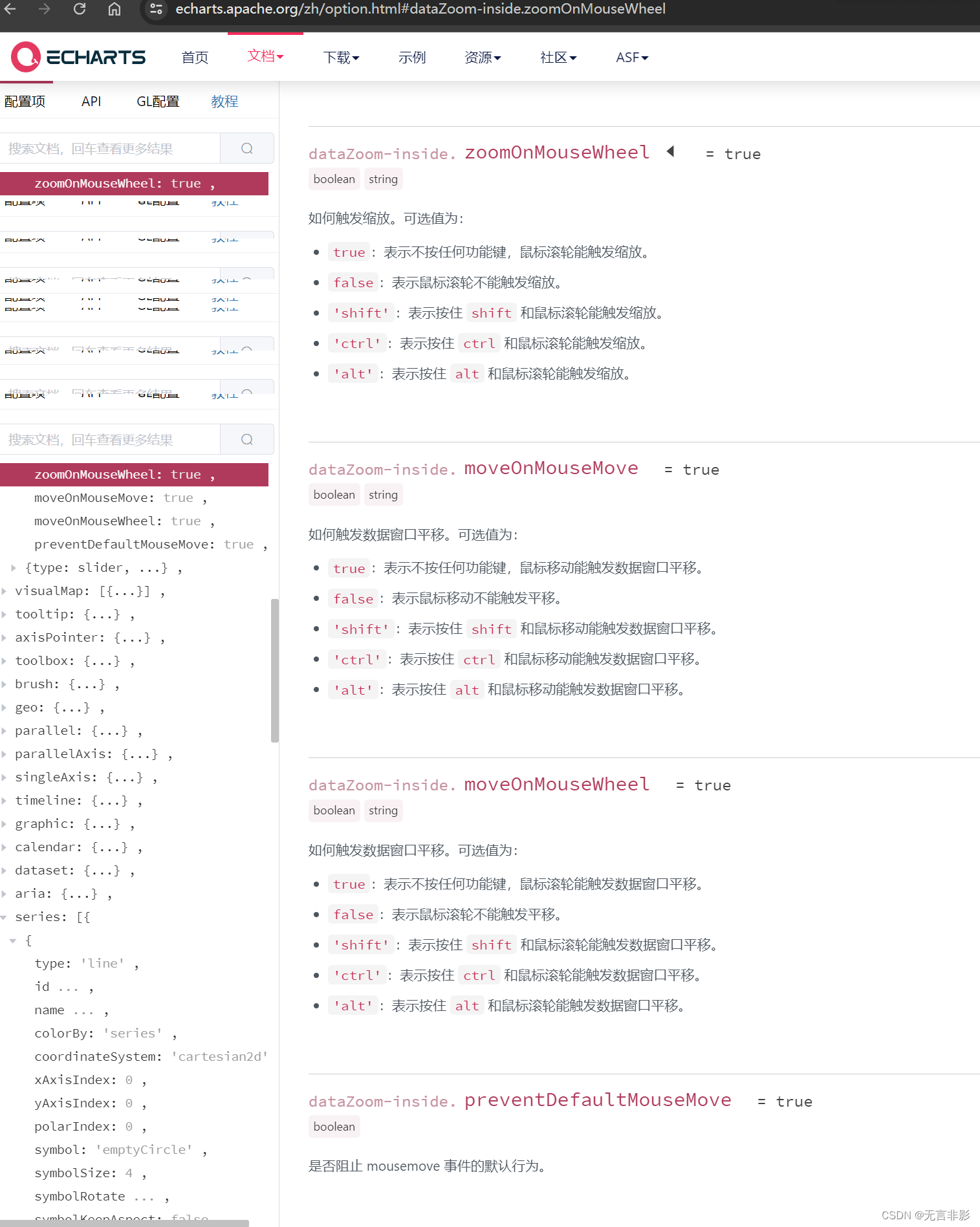
【笔记】echarts图表的缩放和鼠标滚动冲突的处理解决方案
解决方案不是很好,来源于github的issue,官方提供了,组合键触发缩放的功能。 https://github.com/apache/echarts/issues/5769 https://echarts.apache.org/zh/option.html#dataZoom-inside.zoomOnMouseWheel dataZoom-inside.zoomOnMouseWhe…...

代码随想录训练营Day51
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、不同的子序列二、两个字符串的删除操作三、编辑距离 前言 提示:这里可以添加本文要记录的大概内容: 今天是跟着代码随想录刷题的第…...

30天速成大模型高手!无高学历无大厂背景?这套亲测路径助你月入45万!
本文为想进入AI领域但缺乏背景的普通人提供了一条30天的实战学习路径。文章指出企业更看重项目经验而非学历,并分享了包含Prompt工程、RAG技术、Agent开发、模型微调和部署的完整学习计划。通过每周聚焦核心技能并完成实战项目,学员可快速掌握大模型应用…...

WordPress网站营销数据跟踪
如今,在数字营销领域,数据分析已成为优化网站的关键。对于WordPress网站而言,跟踪和分析营销数据不仅有助于提升用户体验,还能提高流量和转化率。许多服务器提供商(如 Hostease)支持一键安装WordPress&…...

基于微信小程序的大学生志愿银行管理系统[小程序]-计算机毕业设计源码+LW文档
摘要:大学生志愿银行作为一种创新性的志愿服务管理模式,对于激励大学生参与志愿服务、量化志愿服务成果具有重要意义。本文设计并实现了一个基于微信小程序的大学生志愿银行管理系统,该系统涵盖系统用户管理、新闻数据管理、变幻图设置、项目…...

【信息科学与工程学】【财务管理】 第十八篇 企业利润设计
企业利润设计模型表第1条字段内容编号P-L1-0001类别综合优化模型领域管理会计与运营管理信息差/认知差/人性差信息差:传统成本核算(如完全成本法)无法准确将间接费用(如工程支持、质检)追溯到消耗这些资源的具…...

Qwen3-ASR-1.7B实战应用:搭建个人语音助手后端服务
Qwen3-ASR-1.7B实战应用:搭建个人语音助手后端服务 1. 为什么选择Qwen3-ASR-1.7B 语音助手已经成为现代生活中不可或缺的一部分,从智能家居控制到日程管理,语音交互正在改变我们与技术互动的方式。然而,大多数个人开发者面临一个…...

使用MATLAB进行SUNFLOWER MATCH LAB模型输出结果的可视化分析
使用MATLAB进行SUNFLOWER MATCH LAB模型输出结果的可视化分析 对于很多科研工作者和数据分析师来说,MATLAB是一个再熟悉不过的老朋友了。它强大的矩阵运算能力和丰富的可视化工具箱,让数据分析和结果呈现变得得心应手。然而,当我们使用像SUN…...

深入解析MTK Linux Charger驱动:从mtk_charger.c看充电算法与电源管理
1. MTK Linux Charger驱动概述 MTK Linux Charger驱动是联发科(MediaTek)为其移动设备平台开发的电池充电管理核心模块。这个驱动的主要职责是协调硬件充电器、电池状态监控以及Linux内核电源子系统的交互。在实际项目中,我发现它就像一位&qu…...

Qwen1.5-1.8B GPTQ Java开发实战:集成SpringBoot构建智能问答服务
Qwen1.5-1.8B GPTQ Java开发实战:集成SpringBoot构建智能问答服务 最近在做一个内部知识库问答系统,需要接入一个轻量又聪明的AI模型。大模型虽好,但动辄几十上百亿的参数,对服务器成本和响应速度都是挑战。经过一番对比…...

Mirage Flow在Ubuntu 20.04上的保姆级安装与配置教程
Mirage Flow在Ubuntu 20.04上的保姆级安装与配置教程 如果你刚接触AI大模型,想在Linux系统上快速搭建一个属于自己的开发环境,那么你来对地方了。今天要聊的Mirage Flow,是一个功能强大的大模型推理框架,能让你轻松玩转文本生成、…...

大数据架构版本控制:代码化基础设施
大数据架构版本控制:代码化基础设施 关键词:大数据架构、版本控制、基础设施即代码(IaC)、CI/CD流水线、数据管道管理、DevOps实践、分布式系统配置 摘要:本文深入探讨如何通过代码化手段实现大数据架构的版本控制,将基础设施配置、数据管道定义、集群参数等核心组件纳入…...