vision mamba-yolov8:结合Vmamba的yolov8目标检测改进实现
1.vision mamba结构与原理
Mamba成功的关键在于S6模型,该模型为NLP任务设计,通过选择性扫描空间状态序列模型,将二次复杂度降低至线性。但由于视觉信号(如图像)的无序性,Mamba的S6模型不能直接应用,
设计了 2D-selective-scan(SS2D)模块。
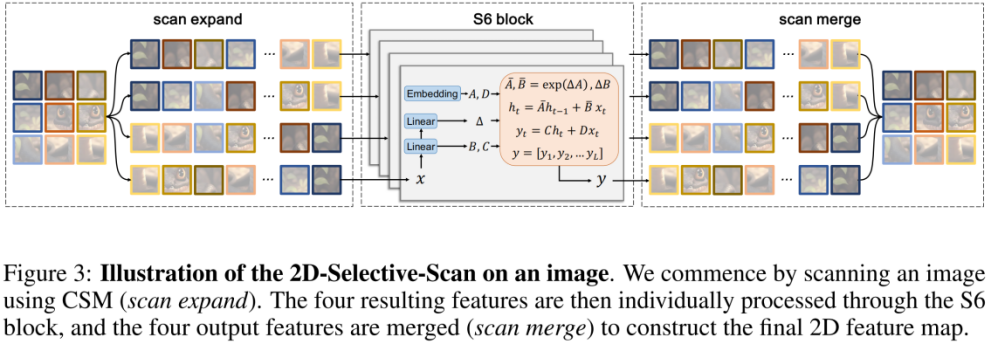
如上图所示,SS2D由三个部分组成:扫描expanding操作、S6块操作和扫描merging操作。如图2(a)所示,扫描expanding操作沿着四个不同的方向(左上到右下、左下到右上、右下到左上、右上到左下)将输入图像展开成序列。然后通过S6块对这些序列进行特征提取,确保各个方向的信息被彻底扫描,从而捕获不同的特征。随后,如图2(b)所示,扫描merging操作将来自四个方向的序列相加并合并,将输出图像恢复为与输入相同的大小。源自Mamba[16]的S6块在S4[17]之上引入了一种选择机制,通过根据输入调整SSM的参数。这使模型能够区分并保留相关信息,同时过滤掉不相关的信息。
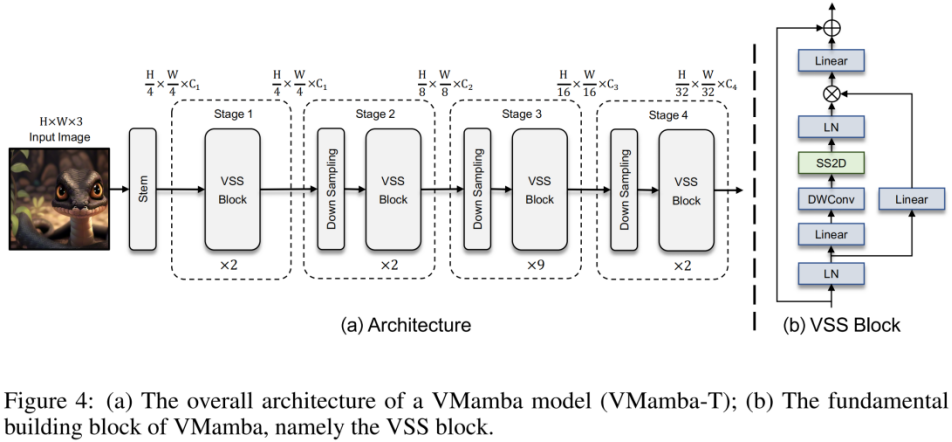
上图为本文提出的 VMamba 结构图。VMamba 的整体框架与主流的视觉模型类似,如上图 (b)所示。经过Layer Normalization后,输入被分成两个分支。在第一个分支中,输入经过一个线性层,然后是一个激活函数。在第二个分支中,输入通过线性层、深度可分离卷积和激活函数进行处理,然后输入到2D选择性扫描(SS2D)模块中进行进一步的特征提取。随后,使用Layer Normalization对特征进行归一化,然后使用第一个分支的输出执行逐元素的生成,以合并两条路径。最后,使用线性层混合特征,并将此结果与残差连接相结合,形成VSS块的输出。本文默认采用SiLU作为激活函数。
2.Vmamba(vision mamba)模块代码实现
import mathimport torch.nn as nnimport torch
import torch.nn.functional as F
from torch.cuda.amp import custom_bwd, custom_fwdfrom einops import rearrange, repeatfrom causal_conv1d import causal_conv1d_fn
import causal_conv1d_cuda
import selective_scan_cudaclass SelectiveScanFn(torch.autograd.Function):@staticmethoddef forward(ctx, u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False,return_last_state=False):if u.stride(-1) != 1:u = u.contiguous()if delta.stride(-1) != 1:delta = delta.contiguous()if D is not None:D = D.contiguous()if B.stride(-1) != 1:B = B.contiguous()if C.stride(-1) != 1:C = C.contiguous()if z is not None and z.stride(-1) != 1:z = z.contiguous()if B.dim() == 3:B = rearrange(B, "b dstate l -> b 1 dstate l")ctx.squeeze_B = Trueif C.dim() == 3:C = rearrange(C, "b dstate l -> b 1 dstate l")ctx.squeeze_C = Trueout, x, *rest = selective_scan_cuda.fwd(u, delta, A, B, C, D, z, delta_bias, delta_softplus)ctx.delta_softplus = delta_softplusctx.has_z = z is not Nonelast_state = x[:, :, -1, 1::2] # (batch, dim, dstate)if not ctx.has_z:ctx.save_for_backward(u, delta, A, B, C, D, delta_bias, x)return out if not return_last_state else (out, last_state)else:ctx.save_for_backward(u, delta, A, B, C, D, z, delta_bias, x, out)out_z = rest[0]return out_z if not return_last_state else (out_z, last_state)@staticmethoddef backward(ctx, dout, *args):if not ctx.has_z:u, delta, A, B, C, D, delta_bias, x = ctx.saved_tensorsz = Noneout = Noneelse:u, delta, A, B, C, D, z, delta_bias, x, out = ctx.saved_tensorsif dout.stride(-1) != 1:dout = dout.contiguous()# The kernel supports passing in a pre-allocated dz (e.g., in case we want to fuse the# backward of selective_scan_cuda with the backward of chunk).# Here we just pass in None and dz will be allocated in the C++ code.du, ddelta, dA, dB, dC, dD, ddelta_bias, *rest = selective_scan_cuda.bwd(u, delta, A, B, C, D, z, delta_bias, dout, x, out, None, ctx.delta_softplus,False # option to recompute out_z, not used here)dz = rest[0] if ctx.has_z else NonedB = dB.squeeze(1) if getattr(ctx, "squeeze_B", False) else dBdC = dC.squeeze(1) if getattr(ctx, "squeeze_C", False) else dCreturn (du, ddelta, dA, dB, dC,dD if D is not None else None,dz,ddelta_bias if delta_bias is not None else None,None,None)def selective_scan_fn(u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False,return_last_state=False):"""if return_last_state is True, returns (out, last_state)last_state has shape (batch, dim, dstate). Note that the gradient of the last state isnot considered in the backward pass."""return SelectiveScanFn.apply(u, delta, A, B, C, D, z, delta_bias, delta_softplus, return_last_state)def selective_scan_ref(u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False,return_last_state=False):"""u: r(B D L)delta: r(B D L)A: c(D N) or r(D N)B: c(D N) or r(B N L) or r(B N 2L) or r(B G N L) or (B G N L)C: c(D N) or r(B N L) or r(B N 2L) or r(B G N L) or (B G N L)D: r(D)z: r(B D L)delta_bias: r(D), fp32out: r(B D L)last_state (optional): r(B D dstate) or c(B D dstate)"""dtype_in = u.dtypeu = u.float()delta = delta.float()if delta_bias is not None:delta = delta + delta_bias[..., None].float()if delta_softplus:delta = F.softplus(delta)batch, dim, dstate = u.shape[0], A.shape[0], A.shape[1]is_variable_B = B.dim() >= 3is_variable_C = C.dim() >= 3if A.is_complex():if is_variable_B:B = torch.view_as_complex(rearrange(B.float(), "... (L two) -> ... L two", two=2))if is_variable_C:C = torch.view_as_complex(rearrange(C.float(), "... (L two) -> ... L two", two=2))else:B = B.float()C = C.float()x = A.new_zeros((batch, dim, dstate))ys = []deltaA = torch.exp(torch.einsum('bdl,dn->bdln', delta, A))if not is_variable_B:deltaB_u = torch.einsum('bdl,dn,bdl->bdln', delta, B, u)else:if B.dim() == 3:deltaB_u = torch.einsum('bdl,bnl,bdl->bdln', delta, B, u)else:B = repeat(B, "B G N L -> B (G H) N L", H=dim // B.shape[1])deltaB_u = torch.einsum('bdl,bdnl,bdl->bdln', delta, B, u)if is_variable_C and C.dim() == 4:C = repeat(C, "B G N L -> B (G H) N L", H=dim // C.shape[1])last_state = Nonefor i in range(u.shape[2]):x = deltaA[:, :, i] * x + deltaB_u[:, :, i]if not is_variable_C:y = torch.einsum('bdn,dn->bd', x, C)else:if C.dim() == 3:y = torch.einsum('bdn,bn->bd', x, C[:, :, i])else:y = torch.einsum('bdn,bdn->bd', x, C[:, :, :, i])if i == u.shape[2] - 1:last_state = xif y.is_complex():y = y.real * 2ys.append(y)y = torch.stack(ys, dim=2) # (batch dim L)out = y if D is None else y + u * rearrange(D, "d -> d 1")if z is not None:out = out * F.silu(z)out = out.to(dtype=dtype_in)return out if not return_last_state else (out, last_state)class MambaInnerFnNoOutProj(torch.autograd.Function):@staticmethod@custom_fwddef forward(ctx, xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True, checkpoint_lvl=1):"""xz: (batch, dim, seqlen)"""assert checkpoint_lvl in [0, 1]L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)if torch.is_autocast_enabled():x_proj_weight = x_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())delta_proj_weight = delta_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())if xz.stride(-1) != 1:xz = xz.contiguous()conv1d_weight = rearrange(conv1d_weight, "d 1 w -> d w")x, z = xz.chunk(2, dim=1)conv1d_bias = conv1d_bias.contiguous() if conv1d_bias is not None else Noneconv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(conv1d_out, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(), "d (b l) -> b d l", l=L)ctx.is_variable_B = B is Nonectx.is_variable_C = C is Nonectx.B_proj_bias_is_None = B_proj_bias is Nonectx.C_proj_bias_is_None = C_proj_bias is Noneif B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl dstate)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():# B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()B = rearrange(B, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if B.stride(-1) != 1:B = B.contiguous()if C is None: # variable CC = x_dbl[:, -d_state:] # (bl dstate)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():# C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()C = rearrange(C, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if C.stride(-1) != 1:C = C.contiguous()if D is not None:D = D.contiguous()out, scan_intermediates, out_z = selective_scan_cuda.fwd(conv1d_out, delta, A, B, C, D, z, delta_bias, delta_softplus)ctx.delta_softplus = delta_softplusctx.checkpoint_lvl = checkpoint_lvlif checkpoint_lvl >= 1: # Will recompute conv1d_out and delta in the backward passconv1d_out, delta = None, Nonectx.save_for_backward(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight,delta_proj_weight, conv1d_out, delta,A, B, C, D, delta_bias, scan_intermediates, out)# return rearrange(out_z, "b d l -> b l d")return out_z@staticmethod@custom_bwddef backward(ctx, dout):# dout: (batch, seqlen, dim)(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight, delta_proj_weight,conv1d_out, delta, A, B, C, D, delta_bias, scan_intermediates, out) = ctx.saved_tensorsL = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)if dout.stride(-1) != 1:dout = dout.contiguous()if ctx.checkpoint_lvl == 1:conv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(),"d (b l) -> b d l", l=L)# The kernel supports passing in a pre-allocated dz (e.g., in case we want to fuse the# backward of selective_scan_cuda with the backward of chunk).dxz = torch.empty_like(xz) # (batch, dim, seqlen)dx, dz = dxz.chunk(2, dim=1)# dout_y = rearrange(dout, "b l d -> b d l") # because no arrange at end of forward, so dout shape is b d ldconv1d_out, ddelta, dA, dB, dC, dD, ddelta_bias, dz, out_z = selective_scan_cuda.bwd(conv1d_out, delta, A, B, C, D, z, delta_bias, dout, scan_intermediates, out, dz,ctx.delta_softplus,True # option to recompute out_z)dD = dD if D is not None else Nonedx_dbl = torch.empty_like(x_dbl)dB_proj_bias = Noneif ctx.is_variable_B:if not A.is_complex():dB = rearrange(dB, "b 1 dstate l -> (b l) dstate").contiguous()else:dB = rearrange(dB, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dB_proj_bias = dB.sum(0) if not ctx.B_proj_bias_is_None else Nonedx_dbl[:, delta_rank:delta_rank + d_state] = dB # (bl d)dB = NonedC_proj_bias = Noneif ctx.is_variable_C:if not A.is_complex():dC = rearrange(dC, "b 1 dstate l -> (b l) dstate").contiguous()else:dC = rearrange(dC, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dC_proj_bias = dC.sum(0) if not ctx.C_proj_bias_is_None else Nonedx_dbl[:, -d_state:] = dC # (bl d)dC = Noneddelta = rearrange(ddelta, "b d l -> d (b l)")ddelta_proj_weight = torch.einsum("dB,Br->dr", ddelta, x_dbl[:, :delta_rank])dx_dbl[:, :delta_rank] = torch.einsum("dB,dr->Br", ddelta, delta_proj_weight)dconv1d_out = rearrange(dconv1d_out, "b d l -> d (b l)")dx_proj_weight = torch.einsum("Br,Bd->rd", dx_dbl, rearrange(conv1d_out, "b d l -> (b l) d"))dconv1d_out = torch.addmm(dconv1d_out, x_proj_weight.t(), dx_dbl.t(), out=dconv1d_out)dconv1d_out = rearrange(dconv1d_out, "d (b l) -> b d l", b=x.shape[0], l=x.shape[-1])# The kernel supports passing in a pre-allocated dx (e.g., in case we want to fuse the# backward of conv1d with the backward of chunk).dx, dconv1d_weight, dconv1d_bias = causal_conv1d_cuda.causal_conv1d_bwd(x, conv1d_weight, conv1d_bias, dconv1d_out, dx, True)dconv1d_bias = dconv1d_bias if conv1d_bias is not None else Nonedconv1d_weight = rearrange(dconv1d_weight, "d w -> d 1 w")return (dxz, dconv1d_weight, dconv1d_bias, dx_proj_weight, ddelta_proj_weight,dA, dB, dC, dD,ddelta_bias if delta_bias is not None else None,dB_proj_bias, dC_proj_bias, None)class MambaInnerFn(torch.autograd.Function):@staticmethod@custom_fwddef forward(ctx, xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True, checkpoint_lvl=1):"""xz: (batch, dim, seqlen)"""assert checkpoint_lvl in [0, 1]L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)if torch.is_autocast_enabled():x_proj_weight = x_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())delta_proj_weight = delta_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())out_proj_weight = out_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())out_proj_bias = (out_proj_bias.to(dtype=torch.get_autocast_gpu_dtype())if out_proj_bias is not None else None)if xz.stride(-1) != 1:xz = xz.contiguous()conv1d_weight = rearrange(conv1d_weight, "d 1 w -> d w")x, z = xz.chunk(2, dim=1)conv1d_bias = conv1d_bias.contiguous() if conv1d_bias is not None else Noneconv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(conv1d_out, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(), "d (b l) -> b d l", l=L)ctx.is_variable_B = B is Nonectx.is_variable_C = C is Nonectx.B_proj_bias_is_None = B_proj_bias is Nonectx.C_proj_bias_is_None = C_proj_bias is Noneif B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl dstate)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():# B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()B = rearrange(B, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if B.stride(-1) != 1:B = B.contiguous()if C is None: # variable CC = x_dbl[:, -d_state:] # (bl dstate)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():# C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()C = rearrange(C, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if C.stride(-1) != 1:C = C.contiguous()if D is not None:D = D.contiguous()out, scan_intermediates, out_z = selective_scan_cuda.fwd(conv1d_out, delta, A, B, C, D, z, delta_bias, delta_softplus)ctx.delta_softplus = delta_softplusctx.out_proj_bias_is_None = out_proj_bias is Nonectx.checkpoint_lvl = checkpoint_lvlif checkpoint_lvl >= 1: # Will recompute conv1d_out and delta in the backward passconv1d_out, delta = None, Nonectx.save_for_backward(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight,delta_proj_weight, out_proj_weight, conv1d_out, delta,A, B, C, D, delta_bias, scan_intermediates, out)return F.linear(rearrange(out_z, "b d l -> b l d"), out_proj_weight, out_proj_bias)@staticmethod@custom_bwddef backward(ctx, dout):# dout: (batch, seqlen, dim)(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight, delta_proj_weight, out_proj_weight,conv1d_out, delta, A, B, C, D, delta_bias, scan_intermediates, out) = ctx.saved_tensorsL = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)if dout.stride(-1) != 1:dout = dout.contiguous()if ctx.checkpoint_lvl == 1:conv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(),"d (b l) -> b d l", l=L)# The kernel supports passing in a pre-allocated dz (e.g., in case we want to fuse the# backward of selective_scan_cuda with the backward of chunk).dxz = torch.empty_like(xz) # (batch, dim, seqlen)dx, dz = dxz.chunk(2, dim=1)dout = rearrange(dout, "b l e -> e (b l)")dout_y = rearrange(out_proj_weight.t() @ dout, "d (b l) -> b d l", l=L)dconv1d_out, ddelta, dA, dB, dC, dD, ddelta_bias, dz, out_z = selective_scan_cuda.bwd(conv1d_out, delta, A, B, C, D, z, delta_bias, dout_y, scan_intermediates, out, dz,ctx.delta_softplus,True # option to recompute out_z)dout_proj_weight = torch.einsum("eB,dB->ed", dout, rearrange(out_z, "b d l -> d (b l)"))dout_proj_bias = dout.sum(dim=(0, 1)) if not ctx.out_proj_bias_is_None else NonedD = dD if D is not None else Nonedx_dbl = torch.empty_like(x_dbl)dB_proj_bias = Noneif ctx.is_variable_B:if not A.is_complex():dB = rearrange(dB, "b 1 dstate l -> (b l) dstate").contiguous()else:dB = rearrange(dB, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dB_proj_bias = dB.sum(0) if not ctx.B_proj_bias_is_None else Nonedx_dbl[:, delta_rank:delta_rank + d_state] = dB # (bl d)dB = NonedC_proj_bias = Noneif ctx.is_variable_C:if not A.is_complex():dC = rearrange(dC, "b 1 dstate l -> (b l) dstate").contiguous()else:dC = rearrange(dC, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dC_proj_bias = dC.sum(0) if not ctx.C_proj_bias_is_None else Nonedx_dbl[:, -d_state:] = dC # (bl d)dC = Noneddelta = rearrange(ddelta, "b d l -> d (b l)")ddelta_proj_weight = torch.einsum("dB,Br->dr", ddelta, x_dbl[:, :delta_rank])dx_dbl[:, :delta_rank] = torch.einsum("dB,dr->Br", ddelta, delta_proj_weight)dconv1d_out = rearrange(dconv1d_out, "b d l -> d (b l)")dx_proj_weight = torch.einsum("Br,Bd->rd", dx_dbl, rearrange(conv1d_out, "b d l -> (b l) d"))dconv1d_out = torch.addmm(dconv1d_out, x_proj_weight.t(), dx_dbl.t(), out=dconv1d_out)dconv1d_out = rearrange(dconv1d_out, "d (b l) -> b d l", b=x.shape[0], l=x.shape[-1])# The kernel supports passing in a pre-allocated dx (e.g., in case we want to fuse the# backward of conv1d with the backward of chunk).dx, dconv1d_weight, dconv1d_bias = causal_conv1d_cuda.causal_conv1d_bwd(x, conv1d_weight, conv1d_bias, dconv1d_out, dx, True)dconv1d_bias = dconv1d_bias if conv1d_bias is not None else Nonedconv1d_weight = rearrange(dconv1d_weight, "d w -> d 1 w")return (dxz, dconv1d_weight, dconv1d_bias, dx_proj_weight, ddelta_proj_weight,dout_proj_weight, dout_proj_bias,dA, dB, dC, dD,ddelta_bias if delta_bias is not None else None,dB_proj_bias, dC_proj_bias, None)class BiMambaInnerFn(torch.autograd.Function):@staticmethod@custom_fwddef forward(ctx, xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, A_b, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True, checkpoint_lvl=1):"""xz: (batch, dim, seqlen)"""assert checkpoint_lvl in [0, 1]L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)if torch.is_autocast_enabled():x_proj_weight = x_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())delta_proj_weight = delta_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())out_proj_weight = out_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())out_proj_bias = (out_proj_bias.to(dtype=torch.get_autocast_gpu_dtype())if out_proj_bias is not None else None)if xz.stride(-1) != 1:xz = xz.contiguous()conv1d_weight = rearrange(conv1d_weight, "d 1 w -> d w")x, z = xz.chunk(2, dim=1)conv1d_bias = conv1d_bias.contiguous() if conv1d_bias is not None else Noneconv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(conv1d_out, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(), "d (b l) -> b d l", l=L)ctx.is_variable_B = B is Nonectx.is_variable_C = C is Nonectx.B_proj_bias_is_None = B_proj_bias is Nonectx.C_proj_bias_is_None = C_proj_bias is Noneif B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl dstate)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():# B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()B = rearrange(B, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if B.stride(-1) != 1:B = B.contiguous()if C is None: # variable CC = x_dbl[:, -d_state:] # (bl dstate)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():# C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()C = rearrange(C, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if C.stride(-1) != 1:C = C.contiguous()if D is not None:D = D.contiguous()out_f, scan_intermediates_f, out_z_f = selective_scan_cuda.fwd(conv1d_out, delta, A, B, C, D, z, delta_bias, delta_softplus)assert not A_b.is_complex(), "A should not be complex!!"out_b, scan_intermediates_b, out_z_b = selective_scan_cuda.fwd(conv1d_out.flip([-1]), delta.flip([-1]), A_b, B.flip([-1]), C.flip([-1]), D, z.flip([-1]), delta_bias,delta_softplus,)out_z = out_z_f + out_z_b.flip([-1])ctx.delta_softplus = delta_softplusctx.out_proj_bias_is_None = out_proj_bias is Nonectx.checkpoint_lvl = checkpoint_lvlif checkpoint_lvl >= 1: # Will recompute conv1d_out and delta in the backward passconv1d_out, delta = None, Nonectx.save_for_backward(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight,delta_proj_weight, out_proj_weight, conv1d_out, delta,A, A_b, B, C, D, delta_bias, scan_intermediates_f, scan_intermediates_b, out_f, out_b)return F.linear(rearrange(out_z, "b d l -> b l d"), out_proj_weight, out_proj_bias)@staticmethod@custom_bwddef backward(ctx, dout):# dout: (batch, seqlen, dim)(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight, delta_proj_weight, out_proj_weight,conv1d_out, delta, A, A_b, B, C, D, delta_bias, scan_intermediates_f, scan_intermediates_b, out_f,out_b) = ctx.saved_tensorsL = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)if dout.stride(-1) != 1:dout = dout.contiguous()if ctx.checkpoint_lvl == 1:conv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(),"d (b l) -> b d l", l=L)# The kernel supports passing in a pre-allocated dz (e.g., in case we want to fuse the# backward of selective_scan_cuda with the backward of chunk).dxz = torch.empty_like(xz) # (batch, dim, seqlen)dx, dz = dxz.chunk(2, dim=1)dout = rearrange(dout, "b l e -> e (b l)")dout_y = rearrange(out_proj_weight.t() @ dout, "d (b l) -> b d l", l=L)dconv1d_out, ddelta, dA, dB, dC, dD, ddelta_bias, dz, out_z_f = selective_scan_cuda.bwd(conv1d_out, delta, A, B, C, D, z, delta_bias, dout_y, scan_intermediates_f, out_f, dz,ctx.delta_softplus,True # option to recompute out_z)# flip onedz_b = torch.empty_like(dz)dconv1d_out_f_b, ddelta_f_b, dA_b, dB_f_b, dC_f_b, dD_b, ddelta_bias_b, dz_b, out_z_b = selective_scan_cuda.bwd(conv1d_out.flip([-1]), delta.flip([-1]), A_b, B.flip([-1]), C.flip([-1]), D, z.flip([-1]), delta_bias,dout_y.flip([-1]), scan_intermediates_b, out_b, dz_b,ctx.delta_softplus,True # option to recompute out_z)dconv1d_out = dconv1d_out + dconv1d_out_f_b.flip([-1])ddelta = ddelta + ddelta_f_b.flip([-1])dB = dB + dB_f_b.flip([-1])dC = dC + dC_f_b.flip([-1])dD = dD + dD_bddelta_bias = ddelta_bias + ddelta_bias_bdz = dz + dz_b.flip([-1])out_z = out_z_f + out_z_b.flip([-1])dout_proj_weight = torch.einsum("eB,dB->ed", dout, rearrange(out_z, "b d l -> d (b l)"))dout_proj_bias = dout.sum(dim=(0, 1)) if not ctx.out_proj_bias_is_None else NonedD = dD if D is not None else Nonedx_dbl = torch.empty_like(x_dbl)dB_proj_bias = Noneif ctx.is_variable_B:if not A.is_complex():dB = rearrange(dB, "b 1 dstate l -> (b l) dstate").contiguous()else:dB = rearrange(dB, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dB_proj_bias = dB.sum(0) if not ctx.B_proj_bias_is_None else Nonedx_dbl[:, delta_rank:delta_rank + d_state] = dB # (bl d)dB = NonedC_proj_bias = Noneif ctx.is_variable_C:if not A.is_complex():dC = rearrange(dC, "b 1 dstate l -> (b l) dstate").contiguous()else:dC = rearrange(dC, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dC_proj_bias = dC.sum(0) if not ctx.C_proj_bias_is_None else Nonedx_dbl[:, -d_state:] = dC # (bl d)dC = Noneddelta = rearrange(ddelta, "b d l -> d (b l)")ddelta_proj_weight = torch.einsum("dB,Br->dr", ddelta, x_dbl[:, :delta_rank])dx_dbl[:, :delta_rank] = torch.einsum("dB,dr->Br", ddelta, delta_proj_weight)dconv1d_out = rearrange(dconv1d_out, "b d l -> d (b l)")dx_proj_weight = torch.einsum("Br,Bd->rd", dx_dbl, rearrange(conv1d_out, "b d l -> (b l) d"))dconv1d_out = torch.addmm(dconv1d_out, x_proj_weight.t(), dx_dbl.t(), out=dconv1d_out)dconv1d_out = rearrange(dconv1d_out, "d (b l) -> b d l", b=x.shape[0], l=x.shape[-1])# The kernel supports passing in a pre-allocated dx (e.g., in case we want to fuse the# backward of conv1d with the backward of chunk).dx, dconv1d_weight, dconv1d_bias = causal_conv1d_cuda.causal_conv1d_bwd(x, conv1d_weight, conv1d_bias, dconv1d_out, dx, True)dconv1d_bias = dconv1d_bias if conv1d_bias is not None else Nonedconv1d_weight = rearrange(dconv1d_weight, "d w -> d 1 w")return (dxz, dconv1d_weight, dconv1d_bias, dx_proj_weight, ddelta_proj_weight,dout_proj_weight, dout_proj_bias,dA, dA_b, dB, dC, dD,ddelta_bias if delta_bias is not None else None,dB_proj_bias, dC_proj_bias, None)def mamba_inner_fn(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):return MambaInnerFn.apply(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, B, C, D, delta_bias, B_proj_bias, C_proj_bias, delta_softplus)def bimamba_inner_fn(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, A_b, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):return BiMambaInnerFn.apply(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, A_b, B, C, D, delta_bias, B_proj_bias, C_proj_bias, delta_softplus)def mamba_inner_fn_no_out_proj(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):return MambaInnerFnNoOutProj.apply(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,A, B, C, D, delta_bias, B_proj_bias, C_proj_bias, delta_softplus)def mamba_inner_ref(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)x = causal_conv1d_fn(x, rearrange(conv1d_weight, "d 1 w -> d w"), conv1d_bias, "silu")# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(x, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = delta_proj_weight @ x_dbl[:, :delta_rank].t()delta = rearrange(delta, "d (b l) -> b d l", l=L)if B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl d)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b dstate (l two)", l=L, two=2).contiguous()if C is None: # variable BC = x_dbl[:, -d_state:] # (bl d)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b dstate (l two)", l=L, two=2).contiguous()y = selective_scan_fn(x, delta, A, B, C, D, z=z, delta_bias=delta_bias, delta_softplus=True)return F.linear(rearrange(y, "b d l -> b l d"), out_proj_weight, out_proj_bias)def bimamba_inner_ref(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, A_b, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)x = causal_conv1d_fn(x, rearrange(conv1d_weight, "d 1 w -> d w"), conv1d_bias, "silu")# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(x, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = delta_proj_weight @ x_dbl[:, :delta_rank].t()delta = rearrange(delta, "d (b l) -> b d l", l=L)if B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl d)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b dstate (l two)", l=L, two=2).contiguous()if C is None: # variable BC = x_dbl[:, -d_state:] # (bl d)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b dstate (l two)", l=L, two=2).contiguous()y = selective_scan_fn(x, delta, A, B, C, D, z=z, delta_bias=delta_bias, delta_softplus=True)y_b = selective_scan_fn(x.flip([-1]), delta.flip([-1]), A_b, B.flip([-1]), C.flip([-1]), D, z.flip([-1]),delta_bias, delta_softplus=True)y = y + y_b.flip([-1])return F.linear(rearrange(y, "b d l -> b l d"), out_proj_weight, out_proj_bias)#------------------------------------------class Mamba(nn.Module):def __init__(self,d_model,d_state=16,d_conv=4,expand=2,dt_rank="auto",dt_min=0.001,dt_max=0.1,dt_init="random",dt_scale=1.0,dt_init_floor=1e-4,conv_bias=True,bias=False,use_fast_path=True, # Fused kernel optionslayer_idx=None,device=None,dtype=None,bimamba_type="none"):factory_kwargs = {"device": device, "dtype": dtype}super().__init__()self.d_model = d_modelself.d_state = d_stateself.d_conv = d_convself.expand = expandself.d_inner = int(self.expand * self.d_model)self.dt_rank = math.ceil(self.d_model / 16) if dt_rank == "auto" else dt_rankself.use_fast_path = use_fast_pathself.layer_idx = layer_idxself.bimamba_type = bimamba_typeself.in_proj = nn.Linear(self.d_model, self.d_inner * 2, bias=bias, **factory_kwargs)self.conv1d = nn.Conv1d(in_channels=self.d_inner,out_channels=self.d_inner,bias=conv_bias,kernel_size=d_conv,groups=self.d_inner,padding=d_conv - 1,**factory_kwargs,)self.activation = "silu"self.act = nn.SiLU()self.x_proj = nn.Linear(self.d_inner, self.dt_rank + self.d_state * 2, bias=False, **factory_kwargs)self.dt_proj = nn.Linear(self.dt_rank, self.d_inner, bias=True, **factory_kwargs)# Initialize special dt projection to preserve variance at initializationdt_init_std = self.dt_rank**-0.5 * dt_scaleif dt_init == "constant":nn.init.constant_(self.dt_proj.weight, dt_init_std)elif dt_init == "random":nn.init.uniform_(self.dt_proj.weight, -dt_init_std, dt_init_std)else:raise NotImplementedError# Initialize dt bias so that F.softplus(dt_bias) is between dt_min and dt_maxdt = torch.exp(torch.rand(self.d_inner, **factory_kwargs) * (math.log(dt_max) - math.log(dt_min))+ math.log(dt_min)).clamp(min=dt_init_floor)# Inverse of softplus: https://github.com/pytorch/pytorch/issues/72759inv_dt = dt + torch.log(-torch.expm1(-dt))with torch.no_grad():self.dt_proj.bias.copy_(inv_dt)# Our initialization would set all Linear.bias to zero, need to mark this one as _no_reinitself.dt_proj.bias._no_reinit = True# S4D real initializationA = repeat(torch.arange(1, self.d_state + 1, dtype=torch.float32, device=device),"n -> d n",d=self.d_inner,).contiguous()A_log = torch.log(A) # Keep A_log in fp32self.A_log = nn.Parameter(A_log)self.A_log._no_weight_decay = True# D "skip" parameterself.D = nn.Parameter(torch.ones(self.d_inner, device=device)) # Keep in fp32self.D._no_weight_decay = True# bidirectionalassert bimamba_type == "v2"A_b = repeat(torch.arange(1, self.d_state + 1, dtype=torch.float32, device=device),"n -> d n",d=self.d_inner,).contiguous()A_b_log = torch.log(A_b) # Keep A_b_log in fp32self.A_b_log = nn.Parameter(A_b_log)self.A_b_log._no_weight_decay = Trueself.conv1d_b = nn.Conv1d(in_channels=self.d_inner,out_channels=self.d_inner,bias=conv_bias,kernel_size=d_conv,groups=self.d_inner,padding=d_conv - 1,**factory_kwargs,)self.x_proj_b = nn.Linear(self.d_inner, self.dt_rank + self.d_state * 2, bias=False, **factory_kwargs)self.dt_proj_b = nn.Linear(self.dt_rank, self.d_inner, bias=True, **factory_kwargs)self.D_b = nn.Parameter(torch.ones(self.d_inner, device=device)) # Keep in fp32self.D_b._no_weight_decay = Trueself.out_proj = nn.Linear(self.d_inner, self.d_model, bias=bias, **factory_kwargs)def forward(self, hidden_states, inference_params=None):"""hidden_states: (B, L, D)Returns: same shape as hidden_states"""batch, seqlen, dim = hidden_states.shapeconv_state, ssm_state = None, Noneif inference_params is not None:conv_state, ssm_state = self._get_states_from_cache(inference_params, batch)if inference_params.seqlen_offset > 0:# The states are updated inplaceout, _, _ = self.step(hidden_states, conv_state, ssm_state)return out# We do matmul and transpose BLH -> HBL at the same timexz = rearrange(self.in_proj.weight @ rearrange(hidden_states, "b l d -> d (b l)"),"d (b l) -> b d l",l=seqlen,)if self.in_proj.bias is not None:xz = xz + rearrange(self.in_proj.bias.to(dtype=xz.dtype), "d -> d 1")A = -torch.exp(self.A_log.float()) # (d_inner, d_state)# In the backward pass we write dx and dz next to each other to avoid torch.catif self.use_fast_path and inference_params is None: # Doesn't support outputting the statesif self.bimamba_type == "v2":A_b = -torch.exp(self.A_b_log.float())out = mamba_inner_fn_no_out_proj(xz,self.conv1d.weight,self.conv1d.bias,self.x_proj.weight,self.dt_proj.weight,A,None, # input-dependent BNone, # input-dependent Cself.D.float(),delta_bias=self.dt_proj.bias.float(),delta_softplus=True,)out_b = mamba_inner_fn_no_out_proj(xz.flip([-1]),self.conv1d_b.weight,self.conv1d_b.bias,self.x_proj_b.weight,self.dt_proj_b.weight,A_b,None,None,self.D_b.float(),delta_bias=self.dt_proj_b.bias.float(),delta_softplus=True,)# F.linear(rearrange(out_z, "b d l -> b l d"), out_proj_weight, out_proj_bias)out = F.linear(rearrange(out + out_b.flip([-1]), "b d l -> b l d"), self.out_proj.weight, self.out_proj.bias)else:out = mamba_inner_fn(xz,self.conv1d.weight,self.conv1d.bias,self.x_proj.weight,self.dt_proj.weight,self.out_proj.weight,self.out_proj.bias,A,None, # input-dependent BNone, # input-dependent Cself.D.float(),delta_bias=self.dt_proj.bias.float(),delta_softplus=True,)else:x, z = xz.chunk(2, dim=1)# Compute short convolutionif conv_state is not None:conv_state.copy_(x[:, :, -self.d_conv :]) # Update state (B D W)if causal_conv1d_fn is None:x = self.act(self.conv1d(x)[..., :seqlen])else:assert self.activation in ["silu", "swish"]x = causal_conv1d_fn(x,rearrange(self.conv1d.weight, "d 1 w -> d w"),self.conv1d.bias,self.activation,)# We're careful here about the layout, to avoid extra transposes.# We want dt to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = self.x_proj(rearrange(x, "b d l -> (b l) d")) # (bl d)dt, B, C = torch.split(x_dbl, [self.dt_rank, self.d_state, self.d_state], dim=-1)dt = self.dt_proj.weight @ dt.t()dt = rearrange(dt, "d (b l) -> b d l", l=seqlen)B = rearrange(B, "(b l) dstate -> b dstate l", l=seqlen).contiguous()C = rearrange(C, "(b l) dstate -> b dstate l", l=seqlen).contiguous()assert self.activation in ["silu", "swish"]y = selective_scan_fn(x,dt,A,B,C,self.D.float(),z=z,delta_bias=self.dt_proj.bias.float(),delta_softplus=True,return_last_state=ssm_state is not None,)if ssm_state is not None:y, last_state = yssm_state.copy_(last_state)y = rearrange(y, "b d l -> b l d")out = self.out_proj(y)return outclass MambaLayer(nn.Module):def __init__(self, dim, d_state=16, d_conv=4, expand=2):super().__init__()self.dim = dimself.norm = nn.LayerNorm(dim)self.mamba = Mamba(d_model=dim, # Model dimension d_modeld_state=d_state, # SSM state expansion factord_conv=d_conv, # Local convolution widthexpand=expand, # Block expansion factorbimamba_type="v2",)def forward(self, x):B, C = x.shape[:2]assert C == self.dimn_tokens = x.shape[2:].numel()img_dims = x.shape[2:]x_flat = x.reshape(B, C, n_tokens).transpose(-1, -2)x_norm = self.norm(x_flat)# x_norm = x_norm.to('cuda')x_mamba = self.mamba(x_norm)out = x_mamba.transpose(-1, -2).reshape(B, C, *img_dims)#out = out.to(x.device)return out3. vision mamba-yolov8 环境检测与安装
1)代码运行环境验证与安装
应代码需要用到cuda的一些库函数,因此需要安装显卡的驱动以及cuda、以及支持gpu的pytorch版本
验证方式:
命令行输入 nvidia-smi ,若有输出表示驱动已经安装
命令行输入 nvcc -V,若有输出,表示cuda已经安装
命令行分别输入
python
import torch
print(torch.cuda.is_available()),若有输出,支持gpu的pytorch已经安装
若以上均正常输出,则进行4,否则需要进行对应的安装
2)代码运行环境安装
可参考以下博客进行安装
- 关于ubuntu 的显卡的驱动以及cuda安装可参考
- 深度学习项目GPU开发环境安装-CSDN博客
- 关于Windows下安装显卡的驱动以及cuda安装可参考Windows下安装CUDA并配置cuDNN教程_windows安装cudnn-CSDN博客g
- 关于支持gpu的pytorch安装,可参考
- Mamba项目实战-Ubuntu-CSDN博客
4. vision mamba-yolov8 代码安装与改进
1) 克隆yolov8源码
命令行运行
# Clone the ultralytics repository
git clone https://github.com/ultralytics/ultralytics或 百度网盘
链接:https://pan.baidu.com/s/1H9VlKlbRxW5W3wrZGYDPQw
提取码:dbfa
2) 安装yolov8
进入pyproject.toml的同级目录命令行
# Navigate to the cloned directory
cd ultralytics-main运行命令安装 yolov8全部所需要的库
# Install the package in editable mode for development
pip install -e .3)安装 causal-conv1d-main 、mamba-ssm-1.0.1
下载causal-conv1d-main,至ultralytics的同级目录下,进入causal-conv1d-main文件夹,进行安装
链接:https://pan.baidu.com/s/1W4mTvjzMJhf-uT_vryT5Kg
提取码:egfj
cd causal-conv1d-main/安装causal-conv1d-main
python setup.py install安装mamba-ssm-1.0.1
pip install mamba-ssm==1.0.14)添加Vmamba模块
在ultralytics/nn目录下新建Addmoudules目录,并在该目录中新建VMamba.py,以及__init__.py文件。

并将“2.Vmamba(vision mamba)模块代码实现”中代码复制到Vmamba.py里面。
__init__.py填入
from .VMamba import *5)更改task.py文件
打开ultralytics/nn/tasks.py
在第七行处,导入模块

from .Addmodules import *
第300行进行替换

替换为
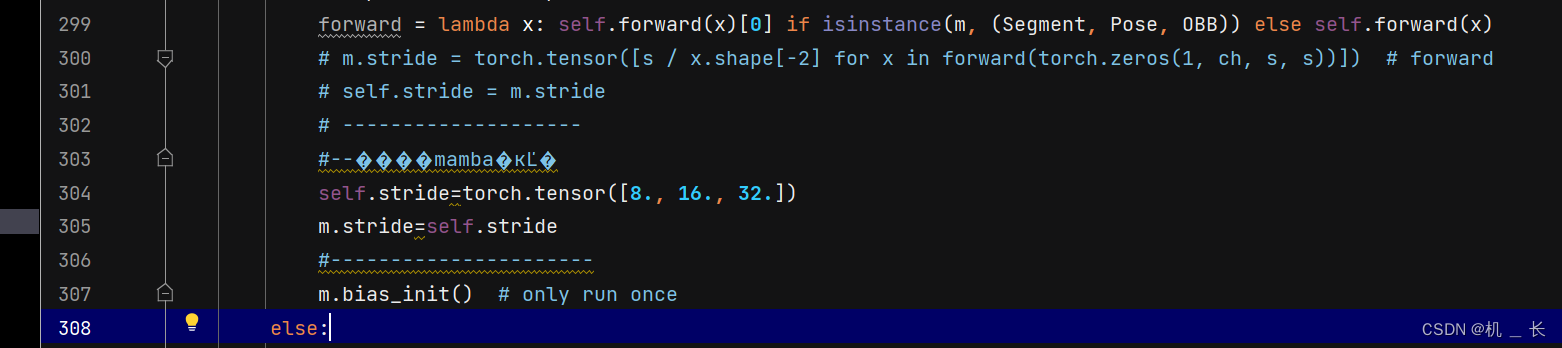
替换代码
# m.stride = torch.tensor([s / x.shape[-2] for x in forward(torch.zeros(1, ch, s, s))]) # forward# self.stride = m.stride# --------------------#--����mamba�ĸĽ�self.stride=torch.tensor([8., 16., 32.])m.stride=self.stride#----------------------895行增加 MambaLayer


6)添加VMamba-yolov8.yaml
在ultralytics/cfg/models/v8,新建VMamba-yolov8.yaml文件
在里面写入
# Ultralytics YOLO ??, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 2 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsd: [0.67, 0.50, 768] #YOLOv8s summary: 295 layers, 11716214 parameters, 11716189 gradients, 36.2 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2 # 0. 320- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4 # 1. 160- [-1, 3, MambaLayer, [128]] # 2. 160- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8 # 3. 80- [-1, 6, MambaLayer, [256]] # 4. 80- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16 # 5. 40- [-1, 6, MambaLayer, [512]] # 6. 40- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32 # 7. 20- [-1, 3, MambaLayer, [1024]] # 8. 20- [-1, 1, SPPF, [1024, 5]] # 9 # 9. 20
# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 3, C2f, [512]] # 12- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 3, C2f, [256]] # 15 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 12], 1, Concat, [1]] # cat head P4- [-1, 3, C2f, [512]] # 18 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 9], 1, Concat, [1]] # cat head P5- [-1, 3, C2f, [1024]] # 21 (P5/32-large)- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
7) 运行训练
在ultralytics-main目录下新建train.py,
在里面写入
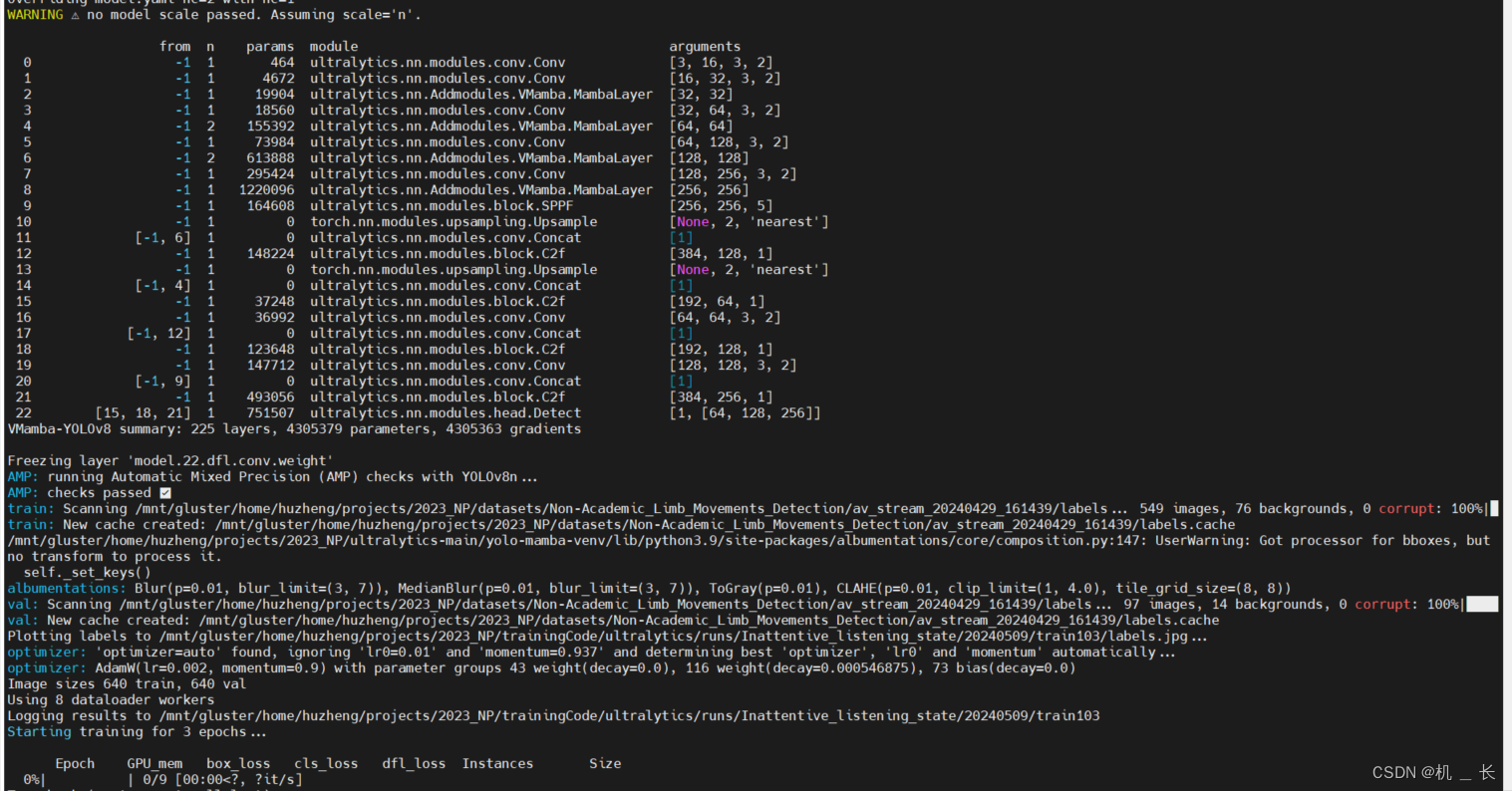
from ultralytics import YOLOmodel = YOLO('./ultralytics/cfg/models/v8/VMamba-yolov8.yaml') model.train(data='数据集配置文件路径',device="0",epochs=300,amp=False ,project="训练结果保存路径",batch=70,imgsz=640)5.vision mamba-yolov8 训练展示
相关文章:
vision mamba-yolov8:结合Vmamba的yolov8目标检测改进实现
1.vision mamba结构与原理 Mamba成功的关键在于S6模型,该模型为NLP任务设计,通过选择性扫描空间状态序列模型,将二次复杂度降低至线性。但由于视觉信号(如图像)的无序性,Mamba的S6模型不能直接应用…...
2025秋招NLP算法面试真题(十一)-Transformer的并行化
正文 本文主要谈一下关于 Transformer的并行化。文章比较短,适合大家碎片化阅读。 Decoder不用多说,没有并行,只能一个一个的解码,很类似于RNN,这个时刻的输入依赖于上一个时刻的输出。 对于Encoder侧: …...

如何在本地一键配置最强国产大模型
自从OpenAI的ChatGPT横空出世以来,国内外各类大语言模型(LLM)层出不穷,其中不乏Google的Gemini、Claude、文心一言等等。相较于竞争激烈的商业模型赛道,以Llama为代表的开源大模型的进步速度也十分惊人。 伴随着大语言…...

代码随想录算法训练营第九天|151.翻转字符串里的单词、右旋字符串、28. 实现 strStr()、459.重复的子字符串
打卡Day9 1.151.翻转字符串里的单词2.右旋字符串3.28. 实现 strStr()4.459.重复的子字符串 1.151.翻转字符串里的单词 题目链接:翻转字符串里的单词 文档讲解: 代码随想录 思路:首先,移除多余的空格;然后,…...

第6天:文件操作和异常处理
学习目标 掌握如何在Python中进行文件读写操作理解文件的打开模式学习如何处理文件中的数据理解异常处理的基本概念掌握使用try、except、else和finally进行异常处理 学习内容 1. 文件操作 在Python中,文件操作包括打开文件、读写文件内容和关闭文件。 文件的打…...

关于freesql 频繁报“【主库】状态不可用,等待后台检查程序恢复方可使用”异常的解决。
我的项目仓储FreeSqlRepository中同时引用了“FreeSql.Provider.MySql” 和“FreeSql.Provider.MySqlConnector” 两个组件。 当我使用freesql操作数据库增删改查时,系统总是报类似如下错误:【主库】状态不可用,等待后台检查程序恢复方可使用…...

Spring Boot中如何使用Flyway进行数据库版本控制
Spring Boot中如何使用Flyway进行数据库版本控制 大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!在现代的软件开发中,数据库版本控制是保证应用程序…...
)
心理学|人格心理学——人格心理学单科作业(中科院)
一、单选题(第1-40小题,每题1.5分,共计60分。) 1、没有两个人能对同一事物做出相同的反应,反映的是人格的( ) 分值1.5分 A、稳定性 B、独特性 C、统合性 D、功能性 正确答案: B、独特性 2、人格决定一个人的生活方式,甚至有时会决定一个人的命运,反映的…...

第三方服务提供商的五大风险
亚马逊如何应对网络安全挑战 关键网络安全统计数据和趋势 移动优先世界中安全和隐私策略 当今数字时代网络安全的重要性 用户无法停止犯安全错误的 3 个原因 首席安全官可能过于依赖 EDR/XDR 防御 随着业务流程变得越来越复杂,公司开始转向第三方来提高其提供关…...

海康视频播放,包含h5和web插件
自行下载 海康开放平台 demo 都写得很清楚,不多描述 1.视频web插件 vue2写法,公共vue文件写法,调用文件即可 开始时需要以下配置,不知道的找对接平台数据的人,必须要,否则播不了 getParameterData: {po…...

数据库-python SQLite3
数据库-python SQLite3 一:sqlite3 简介二: sqlite3 流程1> demo2> sqlite3 流程 三:sqlite3 step1> create table2> insert into3> update4> select1. fetchall()2. fetchone()3. fetchmany() 5> delete6> other step 四&#…...

FFMpeg rtmp 推送本地yuv文件
可以借鉴的:C使用FFmpeg实现YUV数据编码转视频文件_C 语言_脚本之家 yuv文件下载地址:YUV Sequences 代码: #include <stdio.h> #include <unistd.h> #include <iostream> extern "C" { #include "libav…...

websocket使用,spring boot + vite + vue3
websocket使用,spring boot vite vue3 Websocket是什么WebSocket 服务端构建websocket 服务实现处理器pom文件 客户端仓库地址 Websocket是什么 WebSocket 是一种网络传输协议,可在单个 TCP 连接上进行全双工通信,位于 OSI 模型的应用层。…...

基础位运算
基础知识点: 1.判断2的幂 n&(n-1)0 2.每次减一处理 n&(n-1) 3.判断出现1次次数的数 x^0x,x^x0,a^bc则ab^c,ba^c 力扣练习题: 136.只出现一次的数字 class Solution { public:int si…...

性价比高真无线蓝牙耳机有哪些?性价比真无线蓝牙耳机推荐
目前真无线蓝牙耳机的音质和性能已经越来越接近甚至超越传统有线耳机。然而,市面上的TWS耳机品牌和型号繁多,价格也从几十元到几千元不等,性价比自然成了消费者选择时的重要考量因素,究竟哪些真无线蓝牙耳机既能够提供满意的音质和…...
Big Data Tools插件
一些介绍 在Jetbrains的产品中,均可以安装插件,其中:Big Data Tools插件可以帮助我们方便的操作HDFS,比如 IntelliJ IDEA(Java IDE) PyCharm(Python IDE) DataGrip(SQL …...

两个li标签之间有空格这是什么原因
<li> 标签之间出现的空格可能由多种原因造成。以下是一些常见的原因: HTML源代码中的空格:如果你在HTML源代码中直接在两个 <li> 标签之间输入了空格或制表符(Tab),这些空格可能会被浏览器渲染出来。不过&…...

使用Colly库进行高效的网络爬虫开发
引言 随着互联网技术的飞速发展,网络数据已成为信息获取的重要来源。网络爬虫作为自动获取网页内容的工具,在数据分析、市场研究、信息聚合等领域发挥着重要作用。本文将介绍如何使用Go语言中的Colly库来开发高效的网络爬虫。 什么是Colly库࿱…...

【C#】制作图集
如题目,用好几个图片拼在一个大图里,博主是用于Unity游戏开发使用的,话不多说,上代码! using System; using System.Collections.Generic; using System.Drawing; using System.Drawing.Imaging;namespace EffectsPac…...
系统中的报表有什么区别?)
行列视报表系统制作的报表与厂级监控信息系统(SIS)系统中的报表有什么区别?
厂级监控信息系统是集过程实时监测、优化控制及生产过程管理为一体的厂级自动化信息系统,是处于DCS以及相关辅助程控系统与全厂管理信息系统之间的一套实时厂级监控信息系统,该产品也是本公司的一套独立产品。 SIS系统中的报表只是其中的一个模块&#…...

观成科技:隐蔽隧道工具Ligolo-ng加密流量分析
1.工具介绍 Ligolo-ng是一款由go编写的高效隧道工具,该工具基于TUN接口实现其功能,利用反向TCP/TLS连接建立一条隐蔽的通信信道,支持使用Let’s Encrypt自动生成证书。Ligolo-ng的通信隐蔽性体现在其支持多种连接方式,适应复杂网…...
7.4.分块查找
一.分块查找的算法思想: 1.实例: 以上述图片的顺序表为例, 该顺序表的数据元素从整体来看是乱序的,但如果把这些数据元素分成一块一块的小区间, 第一个区间[0,1]索引上的数据元素都是小于等于10的, 第二…...
以下是对华为 HarmonyOS NETX 5属性动画(ArkTS)文档的结构化整理,通过层级标题、表格和代码块提升可读性:
一、属性动画概述NETX 作用:实现组件通用属性的渐变过渡效果,提升用户体验。支持属性:width、height、backgroundColor、opacity、scale、rotate、translate等。注意事项: 布局类属性(如宽高)变化时&#…...

关于nvm与node.js
1 安装nvm 安装过程中手动修改 nvm的安装路径, 以及修改 通过nvm安装node后正在使用的node的存放目录【这句话可能难以理解,但接着往下看你就了然了】 2 修改nvm中settings.txt文件配置 nvm安装成功后,通常在该文件中会出现以下配置&…...
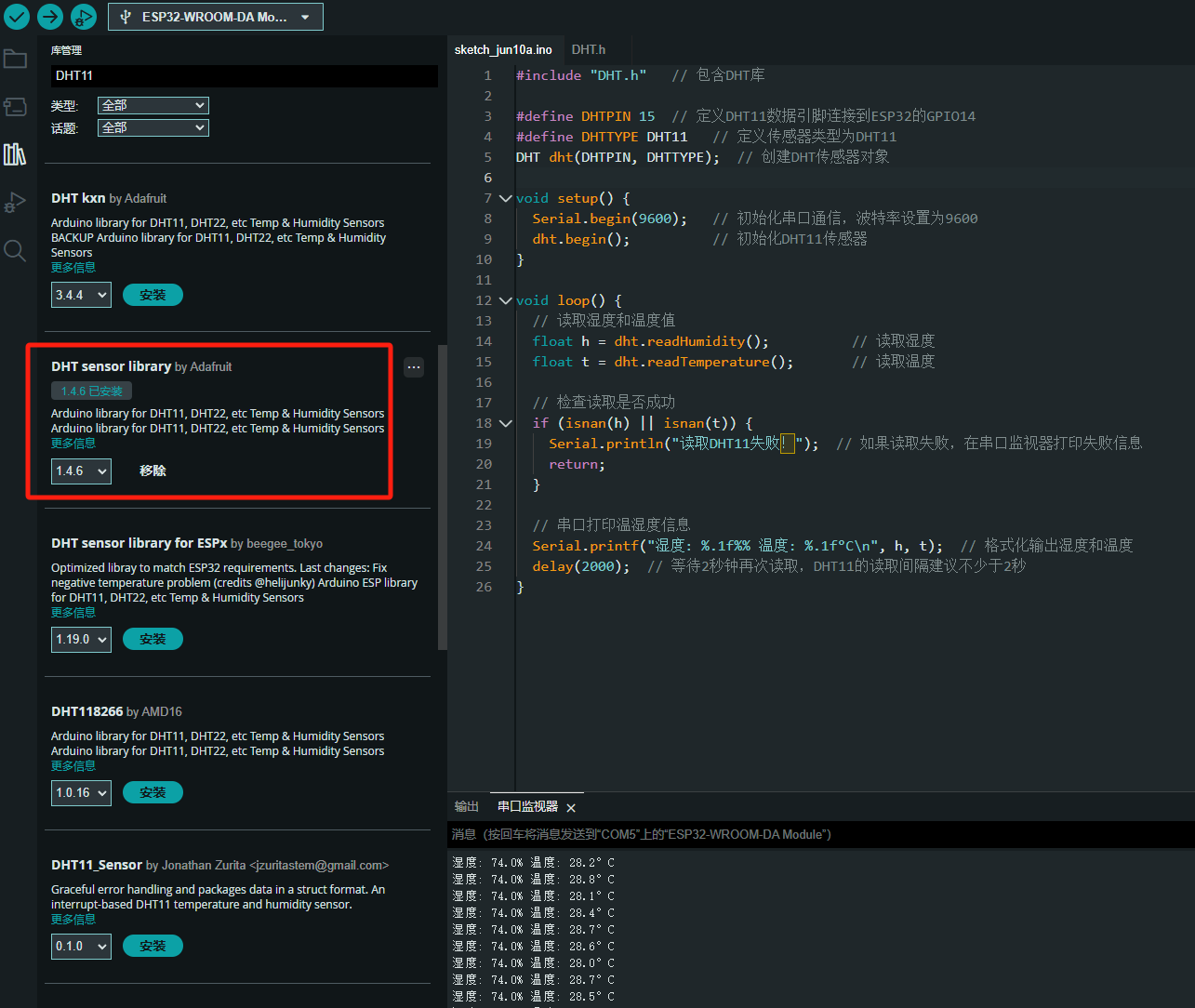
ESP32读取DHT11温湿度数据
芯片:ESP32 环境:Arduino 一、安装DHT11传感器库 红框的库,别安装错了 二、代码 注意,DATA口要连接在D15上 #include "DHT.h" // 包含DHT库#define DHTPIN 15 // 定义DHT11数据引脚连接到ESP32的GPIO15 #define D…...

页面渲染流程与性能优化
页面渲染流程与性能优化详解(完整版) 一、现代浏览器渲染流程(详细说明) 1. 构建DOM树 浏览器接收到HTML文档后,会逐步解析并构建DOM(Document Object Model)树。具体过程如下: (…...
python执行测试用例,allure报乱码且未成功生成报告
allure执行测试用例时显示乱码:‘allure’ �����ڲ����ⲿ���Ҳ���ǿ�&am…...

IP如何挑?2025年海外专线IP如何购买?
你花了时间和预算买了IP,结果IP质量不佳,项目效率低下不说,还可能带来莫名的网络问题,是不是太闹心了?尤其是在面对海外专线IP时,到底怎么才能买到适合自己的呢?所以,挑IP绝对是个技…...
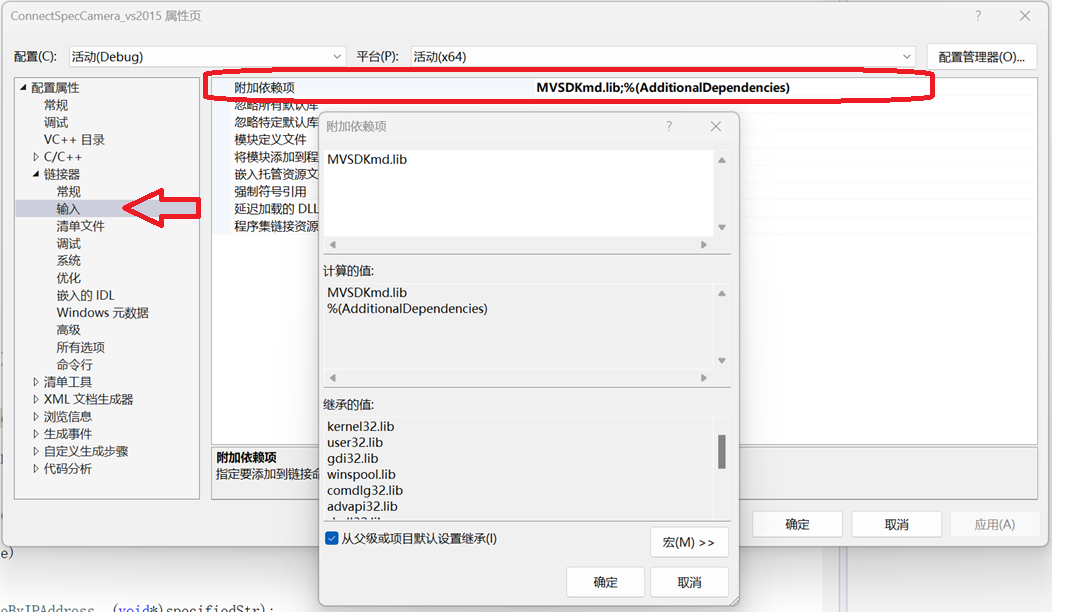
C/C++ 中附加包含目录、附加库目录与附加依赖项详解
在 C/C 编程的编译和链接过程中,附加包含目录、附加库目录和附加依赖项是三个至关重要的设置,它们相互配合,确保程序能够正确引用外部资源并顺利构建。虽然在学习过程中,这些概念容易让人混淆,但深入理解它们的作用和联…...

NPOI操作EXCEL文件 ——CAD C# 二次开发
缺点:dll.版本容易加载错误。CAD加载插件时,没有加载所有类库。插件运行过程中用到某个类库,会从CAD的安装目录找,找不到就报错了。 【方案2】让CAD在加载过程中把类库加载到内存 【方案3】是发现缺少了哪个库,就用插件程序加载进…...