操作系统真象还原:编写硬盘驱动程序
第13章-编写硬盘驱动程序
这是一个网站有所有小节的代码实现,同时也包含了Bochs等文件
13.1 硬盘及分区表
13.1.1 创建从盘及获取安装的磁盘数
要实现文件系统,必须先有个磁盘介质,虽然咱们己经有个虚拟磁盘 hd60M.img,但它只充当了启动盘的作用,仅用来存储内核,是个没有文件系统的裸盘( raw disk)
如同我们之前第一章创建主盘时一样,在bochs目录下:
创建磁盘
bin/bximage
然后在输入框依次输入以下,输入一个,按一次回车
1
hd
flat
80
hd80M.img
接下来,我们在bochsrc.disk文件中,写入
ata0-slave: type=disk, path="hd80M.img", mode=flat,cylinders=162,heads=16,spt=63
这样,bochs虚拟机启动时,就会识别这个磁盘并且自动挂载。
xp:用来查看物理地址处的值,eg:xp/b 0x475查看0x475处一个字节的值。这个0x475处存储的是主机上安装的硬盘数量。下面是成功安装了两个硬盘:

13.1.2 创建磁盘分区表
**文件系统是运行在操作系统中的软件模块,是操作系统提供的一套管理磁盘文件读写的方法和数据组织、存储形式,**因此,文件系统=数据结构+算法,哈哈,所以它是程序。它的管理对象是文件,管辖范围是分区,因此它建立在分区的基础上,每个分区都可以有不同的文件系统。咱们刚创建了磁盘而己,磁盘还是裸盘,即传说中的 raw disk,本节的任务是把刚创建的磁盘 hd80M.img 分区。
磁盘的物理结构:
- 盘片:类似光盘中的一个圆盘,上面布满了磁性介质。
- 扇区:扇区是硬盘读写的基本单位,它在磁道上均匀分布,与磁头和磁道不同,扇区从 1 开始编号扇区的大小字节数=256 × N. N为自然数,通常取2,因此扇区的大小为512字节
- 磁道:盘片上的一个个同心圈就是磁道,它是扇区的载体,每一个磁道由外向里从 0 开始编号
- 磁头:就是磁头,哈哈,可以粗略理解为磁带中的磁头一个盘片分为上下两个面,各面都有一个磁头,因此一个盘片包括两个磁头,磁头号就表示盘面,平时所说的盘面号就是磁头号
- 柱面:这些由不同盘面上的编号相同的磁道(这些编号相同的同心圆大小一致)从上到下所组成的圆柱体的回转面就称为柱面,因此柱面的大小等于盘面数(磁头数〉乘以每磁道扇区数。
- 分区:是由多个编号连续的柱面组成的,因此分区在物理上的表现是由某段范围内的所有柱面组成的通心环,并不是像“饼图”那种逻辑表示,当然若整个硬盘只有 1 个分区,那这个分区就是个所有柱面组成的圆柱体 。 分区不能跨柱面,也就是同一个柱面不能包含两个分区,一个柱面只属于一个分区,分区的起始和终止都落在完整的柱面上,并不会出现多个分区共享同一柱面的情况,这就是所谓的“分区粒度”。

- 硬盘容量=单片容量 x 磁头数;
- 单片容量=每磁道扇区数 x 磁道数 x 512;
磁道数又等于柱面数:硬盘容量=每磁道扇区数 x 柱面数 x 512 x 磁头数;
下面是hd80M.img的分区布局图:

13.2 编写硬盘驱动程序
13.2.1 硬盘初始化
硬件是实实在在的东西,要想在软件中管理它们,只能从逻辑上抓住这些硬件的特性,将它们抽象成一些数据结构,然后这些数据结构便代表了硬件,用这些数据结构来组织硬件的信息及状态,在逻辑上硬件就是这数据结构。硬盘也是“实在”的东东,为了管理它们还是得将它们抽象成某些数据结构,这就是本节的任务之一。
硬盘上有两个 ata 通道,也称为 IDE 通道。第 1 个 ata 通道上的两个硬盘(主和从)的中断信号挂在 8259A 从片的 IRQ14 上,第 2 个 ata 通道接在 8259A 从片的 IRQ15 上,该 ata 通道上可支持两个硬盘 。 来自 8259A从片的中断是由 8259A 主片帮忙向处理器传达的, 8259A 从片是级联在 8259A 主片的 IRQ2 接口的,因此为了让处理器也响应来自 8259A 从片的中断,屏蔽中断寄存器必须也把 IRQ2 打开.
由于我们的两个磁盘都是挂在了IDE通道0上,而IDE通道0又是挂在了IRQ14线上,所以我们只需要再打开这条线的中断信号就行
/* 初始化可编程中断控制器8259A */
static void pic_init(void) {/* 初始化主片 */outb (PIC_M_CTRL, 0x11); // ICW1: 边沿触发,级联8259, 需要ICW4.outb (PIC_M_DATA, 0x20); // ICW2: 起始中断向量号为0x20,也就是IR[0-7] 为 0x20 ~ 0x27.outb (PIC_M_DATA, 0x04); // ICW3: IR2接从片. outb (PIC_M_DATA, 0x01); // ICW4: 8086模式, 正常EOI/* 初始化从片 */outb (PIC_S_CTRL, 0x11); // ICW1: 边沿触发,级联8259, 需要ICW4.outb (PIC_S_DATA, 0x28); // ICW2: 起始中断向量号为0x28,也就是IR[8-15] 为 0x28 ~ 0x2F.outb (PIC_S_DATA, 0x02); // ICW3: 设置从片连接到主片的IR2引脚outb (PIC_S_DATA, 0x01); // ICW4: 8086模式, 正常EOIoutb (PIC_M_DATA, 0xf8); //IRQ2用于级联从片,必须打开,否则无法响应从片上的中断主片上打开的中断有IRQ0的时钟,IRQ1的键盘和级联从片的IRQ2,其它全部关闭outb (PIC_S_DATA, 0xbf); //打开从片上的IRQ14,此引脚接收硬盘控制器的中断 put_str(" pic_init done\n");
}在以前,我们内核态下进行打印一直用的console_put_xxx之类的函数,这很不方便,因为我们经常打印信息需要调用console_put_int, console_put_str, console_put_ch这三个函数配合使用。所以我们先来实现一个类似于用户态函数printf的内核态函数printk
/** @Author: Adward-DYX 1654783946@qq.com* @Date: 2024-04-28 17:33:08* @LastEditors: Adward-DYX 1654783946@qq.com* @LastEditTime: 2024-05-06 12:59:59* @FilePath: /OS/chapter13/13.2/kernel/stdio-kernel.c* @Description: 这是默认设置,请设置`customMade`, 打开koroFileHeader查看配置 进行设置: https://github.com/OBKoro1/koro1FileHeader/wiki/%E9%85%8D%E7%BD%AE*/
#include "stdio-kernel.h"
#include "console.h"
#include "stdint.h"
#include "global.h"
#include "stdio.h"#define va_start(args, first_fix) args = (va_list)&first_fix
#define va_end(args) args = NULL/*供内核使用的格式化输出函数*/
void printk(const char* format, ...){va_list args;va_start(args, format);char buf[1024] = {0};vsprintf(buf,format,args);va_end(args);console_put_str(buf);
}
创建硬盘相关的数据结构:
/** @Author: Adward-DYX 1654783946@qq.com* @Date: 2024-04-28 17:37:39* @LastEditors: Adward-DYX 1654783946@qq.com* @LastEditTime: 2024-05-06 13:18:20* @FilePath: /OS/chapter13/13.2/device/ide.h* @Description: 这是默认设置,请设置`customMade`, 打开koroFileHeader查看配置 进行设置: https://github.com/OBKoro1/koro1FileHeader/wiki/%E9%85%8D%E7%BD%AE*/
#ifndef __DEVICE_IDE_H
#define __DEVICE_IDE_H#include "stdint.h"
#include "list.h"
#include "bitmap.h"
#include "global.h"
#include "thread.h"
#include "sync.h"struct partition{uint32_t start_lba; //起始扇区uint32_t sec_cnt; //扇区数struct disk* my_disk; //分区所属的硬盘struct list_elem part_tag; //用于队列中的标记 char name[8]; //分区名称struct super_block* sb; //本分区的超级块struct bitmap block_bitmap; //块位图struct bitmap inode_bitmap; //i结点位图struct list open_inodes; //本分区打开的i结点队列
};/*硬盘结构*/
struct disk{char name[8]; //本硬盘的名称struct ide_channel* my_channel; //此块硬盘归属于那个ide通道uint8_t dev_no; //本硬盘是主0,还是从1struct partition prim_parts[4]; //主分区顶多只有4个struct partition logic_parts[8]; //逻辑分区数量无限,但总得有个上限支持,这里设置为8
};/*ata通道*/
//port_base咱们这里只处理两个通道的主板,每个通道的
//端口范围是不一样的,通道1(Primary通道)的命令块寄存器端口范围是 Ox1FO~Ox1F7,控制块寄存器
//端口是 0x3F6,通道 2 ( Secondary 通道〉命令块寄存器端口范围是 Ox170~Ox177 ,控制块寄存器端口是0x376
//通道 l 的端口可以以 0x1F0 为基数,其命令块寄存器端口在此基数上分别加上 0~ 7 就可以了,
//控制块寄存器端口在此基数上加上 0x206,同理,通道 2 的基数就是 0xl70
struct ide_channel{char name[8]; //本ata通道名称uint16_t port_base; //本通道的起始端口号uint8_t irq_no; //本通道所用的中断号struct lock lock; //通道锁bool expecting_intr; //表示等待硬盘的中断struct semaphore disk_done; //用于阻塞、唤醒驱动程序struct disk devices[2]; //一个通道上连接两个硬盘,一主一从
};
创建并初始化
#include "stdint.h"
#include "global.h"
#include "ide.h"
#include "debug.h"
#include "sync.h"
#include "stdio.h"
#include "stdio-kernel.h"
#include "interrupt.h"
#include "memory.h"
#include "debug.h"/* 定义硬盘各寄存器的端口号,见书p126 */
#define reg_data(channel) (channel->port_base + 0)
#define reg_error(channel) (channel->port_base + 1)
#define reg_sect_cnt(channel) (channel->port_base + 2)
#define reg_lba_l(channel) (channel->port_base + 3)
#define reg_lba_m(channel) (channel->port_base + 4)
#define reg_lba_h(channel) (channel->port_base + 5)
#define reg_dev(channel) (channel->port_base + 6)
#define reg_status(channel) (channel->port_base + 7)
#define reg_cmd(channel) (reg_status(channel))
#define reg_alt_status(channel) (channel->port_base + 0x206)
#define reg_ctl(channel) reg_alt_status(channel)/* reg_alt_status寄存器的一些关键位,见书p128 */
#define BIT_STAT_BSY 0x80 // 硬盘忙
#define BIT_STAT_DRDY 0x40 // 设备准备好
#define BIT_STAT_DRQ 0x8 // 数据传输准备好了/* device寄存器的一些关键位 */
#define BIT_DEV_MBS 0xa0 // 第7位和第5位固定为1
#define BIT_DEV_LBA 0x40 //指定为LBA寻址方式
#define BIT_DEV_DEV 0x10 //指定主盘或从盘,DEV位为1表示从盘,为0表示主盘/* 一些硬盘操作的指令 */
#define CMD_IDENTIFY 0xec // identify指令
#define CMD_READ_SECTOR 0x20 // 读扇区指令
#define CMD_WRITE_SECTOR 0x30 // 写扇区指令/* 定义可读写的最大扇区数,调试用的 */
#define max_lba ((80*1024*1024/512) - 1) // 只支持80MB硬盘uint8_t channel_cnt; // 记录通道数
struct ide_channel channels[2]; // 有两个ide通道/*硬盘数据结构初始化*/
void ide_init(void){printk("ide_init start\n");uint8_t hd_cnt = *((uint8_t*)(0x475)); //获取硬盘的数量printk(" ide_init hd_cnt:%d\n",hd_cnt);ASSERT(hd_cnt > 0);list_init(&partition_list);channel_cnt = DIV_ROUND_UP(hd_cnt,2); //一个 ide 通道上有两个硬盘,根据硬盘数量反推有几个 ide 通道struct ide_channel* channel;uint8_t channel_no = 0, dev_no = 0;/*处理每个通道上的硬盘*/while(channel_no < channel_cnt){channel = &channels[channel_no];sprintf(channel->name,"ide%d",channel_no);/*为每个 ide 通道初始化端口基址及中断向量*/switch(channel_no){case 0:channel->port_base = 0x1f0; //ide0通道的起始端口号是0x1f0channel->irq_no = 0x20+14; //从片8259A上倒数第二个中断引脚 硬盘,也就是ide0通道的中断向量号 , 0x20为起始中断号break;case 1:channel->port_base = 0x170; //ide1通道的起始端口号是0x170channel->irq_no = 0x20+15; //从片上最后一个中断引脚,我们用来相应ide1通道上的硬盘中断break;}channel->expecting_intr = false; //未向硬盘写入指令时不期待硬盘的中断lock_init(&channel->lock);/*初始化为0,目的是向硬盘控制器请求数据后,硬盘驱动sema_down此信号量会阻塞线程,直到硬盘完成后通过发中断,由中断处理程序将此信号量sema_up,唤醒线程*/sema_init(&channel->disk_done,0);register_handler(channel->irq_no,intr_hd_handler);/*分别获取两个硬盘的参数及分区*/while(dev_no < 2){struct disk* hd = &channel->devices[dev_no];hd->my_channel = channel;hd->dev_no = dev_no;sprintf(hd->name,"sd%c",'a'+channel_no*2+dev_no);identify_disk(hd);//获取硬盘参数if(dev_no!=0){ //内核本身的裸硬盘(hd60M.img)不处理partition_scan(hd,0); //扫描该硬盘上的分区}p_no=0,l_no=0;dev_no++;}dev_no = 0;channel_no++; //下一个channel}printk("\n all partition info\n");/*打印所有分区信息*/list_traversal(&partition_list,partition_info,(int)NULL);printk("ide_init done\n");
}
在物理地址0x475存储着主机上安装的硬盘数量,它是由BIOS检测并写入的。
13.2.2 实现thread_yied和idle线程
thread_yield 定义在也read.c 中,它的功能是主动把 CPU 使用权让出来,它与thread_block 的区别是thread_yield 执行后任务的状态是 TASK_READY,即让出 CPU 后,它会被加入到就绪队列中,下次还能继续被调度器调度执行,而 thread_block 执行后任务的状态是 TASK_BLOCKD,需要被唤醒后才能加入到就绪队列 , 所以下次执行还不知道是什么时候 。
硬盘是一个相对于CPU来说及其低速的设备,所以,当硬盘在进行需要长时间才能完成的工作时(比如写入数据),我们最好能让驱动程序把CPU让给其他任务。所以,我们来实现一个thread_yield函数,就是用于把CPU让出来。实质就是将调用者重新放入就绪队列队尾。
修改thread.c
/* 主动让出cpu,换其它线程运行 */
void thread_yield(void) {struct task_struct* cur = running_thread(); enum intr_status old_status = intr_disable();ASSERT(!elem_find(&thread_ready_list, &cur->general_tag));list_append(&thread_ready_list, &cur->general_tag);cur->status = TASK_READY;schedule();intr_set_status(old_status);
}thread_yield中有个关中断的操作,会不会导致切换后由于关闭中断,而不响应时钟中断导致一直运行在切换后的进程/线程中呢?其实并不会,我们讨论两种情况,一种是进程/线程第一次上机运行,一种是进程/线程之前已经运行过,但由于时间片到期而换下过处理器。对于前者,我们进程/线程第一次上机运行都会经过kernel_thread这个线程启动器,而这个里面是有开中断的代码的。对于后者,当切换回进程/线程时,它们执行kernel.S中的中断退出代码jmp intr_exit,这里面有一条指令iretd会打开中断,让处理器能够继续响应中断代理发送来的中断信号。
接下来我们实现一个idle线程,用于在就绪队列为空时运行。需要注意一点:我们之前没有idle线程,我们的系统没有出现书上说的由于就绪队列为空然后被ASSERT(!list_empty(&thread_ready_list);悬停的情况,是因为我们的主线程(简单理解,就是main函数里面的while(1))会一直被不断加入就绪队列,所以就绪队列并不存在为空的时候。
修改thread.c
struct task_struct* idle_thread; // idle线程/* 系统空闲时运行的线程 */
static void idle(void* arg UNUSED) {while(1) {thread_block(TASK_BLOCKED); //执行hlt时必须要保证目前处在开中断的情况下,hlt是停止处理器将进入暂停状态,直到发生硬件中断asm volatile ("sti; hlt" : : : "memory");}
}/* 实现任务调度 */
void schedule() {ASSERT(intr_get_status() == INTR_OFF);struct task_struct* cur = running_thread(); if (cur->status == TASK_RUNNING) { // 若此线程只是cpu时间片到了,将其加入到就绪队列尾ASSERT(!elem_find(&thread_ready_list, &cur->general_tag));list_append(&thread_ready_list, &cur->general_tag);cur->ticks = cur->priority; // 重新将当前线程的ticks再重置为其priority;cur->status = TASK_READY;} else { /* 若此线程需要某事件发生后才能继续上cpu运行,不需要将其加入队列,因为当前线程不在就绪队列中。*/}/* 如果就绪队列中没有可运行的任务,就唤醒idle */if (list_empty(&thread_ready_list)) {thread_unblock(idle_thread);}ASSERT(!list_empty(&thread_ready_list));thread_tag = NULL; // thread_tag清空
/* 将thread_ready_list队列中的第一个就绪线程弹出,准备将其调度上cpu. */thread_tag = list_pop(&thread_ready_list); struct task_struct* next = elem2entry(struct task_struct, general_tag, thread_tag);next->status = TASK_RUNNING;process_activate(next); //激活任务页表switch_to(cur, next);
}/* 初始化线程环境 */
void thread_init(void) {put_str("thread_init start\n");list_init(&thread_ready_list);list_init(&thread_all_list);lock_init(&pid_lock);
/* 将当前main函数创建为线程 */make_main_thread();/* 创建idle线程 */idle_thread = thread_start("idle", 10, idle, NULL);put_str("thread_init done\n");
}13.2.3 实现简单的休眠函数
硬盘和 CPU 是相互独立的个体,它们各自并行执行,但由于硬盘是低速设备,其在处理请求时往往消耗很长的时间(不过手册上说最慢的情况也能在 31 秒之内完成),为避免浪费 CPU 资源,在等待硬盘操作的过程中最好把 CPU 主动让出来,让 CPU 去执行其他任务,为实现这种“明智”的行为,我们在 timer.c中定义休眠函数,当然这只是简易版,精度不是很高,能达到目的就可以了
之前我们实现的thread_yield是将当前任务加入就绪队列队尾,仅仅是把CPU让出来一次。我们来实现一个定时让出CPU的函数,也就是让一个任务在固定时间内都不执行。
修改timer.c
#define mil_seconds_per_intr (1000 / IRQ0_FREQUENCY)/* 以tick为单位的sleep,任何时间形式的sleep会转换此ticks形式 */
static void ticks_to_sleep(uint32_t sleep_ticks) {uint32_t start_tick = ticks;/* 若间隔的ticks数不够便让出cpu */while (ticks - start_tick < sleep_ticks) {thread_yield();}
}/* 以毫秒为单位的sleep 1秒= 1000毫秒 */
void mtime_sleep(uint32_t m_seconds) {uint32_t sleep_ticks = DIV_ROUND_UP(m_seconds, mil_seconds_per_intr);ASSERT(sleep_ticks > 0);ticks_to_sleep(sleep_ticks);
}
13.2.4 完善硬盘驱动程序

现在,我们来实现驱动程序的主体部分,也就是实际与硬盘打交道的函数,实质就是将一系列寄存器操作进行封装
/** @Author: Adward-DYX 1654783946@qq.com* @Date: 2024-04-29 09:54:07* @LastEditors: Adward-DYX 1654783946@qq.com* @LastEditTime: 2024-05-06 13:17:42* @FilePath: /OS/chapter13/13.2/device/ide.c* @Description: 这是默认设置,请设置`customMade`, 打开koroFileHeader查看配置 进行设置: https://github.com/OBKoro1/koro1FileHeader/wiki/%E9%85%8D%E7%BD%AE*/
#include "ide.h"
#include "stdint.h"
#include "global.h"
#include "list.h"
#include "bitmap.h"
#include "debug.h"
#include "stdio.h"
#include "thread.h"
#include "sync.h"
#include "io.h"
#include "timer.h"
#include "string.h"
#include "stdio-kernel.h"/*定义硬盘各寄存器的端口号*/
#define reg_data(charnnel) (charnnel->port_base + 0)
#define reg_error(charnnel) (charnnel->port_base + 1)
#define reg_sect_cnt(charnnel) (charnnel->port_base + 2)
#define reg_lba_l(charnnel) (charnnel->port_base + 3)
#define reg_lba_m(charnnel) (charnnel->port_base + 4)
#define reg_lba_h(charnnel) (charnnel->port_base + 5)
#define reg_dev(charnnel) (charnnel->port_base + 6)
#define reg_status(charnnel) (charnnel->port_base + 7)
#define reg_cmd(charnnel) (reg_status(charnnel))
#define reg_alt_status(charnnel) (charnnel->port_base + 0x206)
#define reg_ctl(charnnel) (reg_alt_status(charnnel))/*reg_alt_status寄存器的一些关键位*/
#define BIT_ALT_STAT_BSY 0x80 //硬盘忙
#define BIT_ALT_STAT_DRDY 0x40 //驱动器准备好了
#define BIT_ALT_STAT_DRQ 0x8 //数据传输准备好了
#define BIT_ALT_STAT_ERR 0x1 //有错误发生/*device寄存器的一些关键位*/
#define BIT_DEV_MBS 0xa0 //第7位和第5位固定位1
#define BIT_DEV_LBA 0x40 //指定为LBA寻址方式
#define BIT_DEV_DEV 0x10 //主盘还是从盘 现在为1是从盘,为0表示主盘/*一些硬盘操作的指令*/
#define CMD_IDENTIFY 0xec //identify指令,即硬盘识别
#define CMD_READ_SECTOR 0x20 //读扇区指令
#define CMD_WRITE_SECTOR 0x30 //写扇区指令/*定义可读写的最大扇区数,调试用的*/
#define max_lba ((80*1024*1024/512)-1) //只支持80M硬盘uint8_t channel_cnt; //按硬盘数计算的通道数
struct ide_channel channels[2]; //有两个ide通道/*选择读写的硬盘*/
static void select_disk(struct disk* hd){uint8_t reg_device = BIT_DEV_MBS | BIT_DEV_LBA;if(hd->dev_no == 1){ //若是从盘就置 DEV 位为 1reg_device |= BIT_DEV_DEV;}outb(reg_dev(hd->my_channel),reg_device);
}/*向硬盘控制器写入起始扇区地址及腰读写的扇区数*/
static void select_sector(struct disk* hd, uint32_t lba, uint8_t sec_cnt){ASSERT(lba <= max_lba);struct ide_channel* channel = hd->my_channel;/*写入要读写的扇区数*/outb(reg_sect_cnt(channel),sec_cnt); //如果 sec_cnt 为 0 ,贝Jj表示写入 256 个扇区/*写入lba地址,即扇区号*/outb(reg_lba_l(channel),lba); //lba 地址的低8位,不用单独取出低8位,outb 函数中的汇编指令 outb %b0,%w1会只用aloutb(reg_lba_m(channel),lba>>8); //lba地址的8-15位outb(reg_lba_h(channel),lba>>16); //lba地址的16-23位/*因为 lba 地址的第 24 ~27 位要存储在 device 寄存器的0-3 位,无法单独写入这 4 位,所以在此处把 device 寄存器再重新写入一次*/outb(reg_dev(channel),BIT_DEV_MBS|BIT_DEV_LBA|(hd->dev_no==1 ? BIT_DEV_DEV : 0)|lba>>24);
}/*向通道channel发命令cmd*/
static void cmd_out(struct ide_channel* channel,uint8_t cmd){/*要向硬盘发出了命令便将此标记置为true,硬盘中断处理程序需要根据它来判断*/channel->expecting_intr = true;outb(reg_cmd(channel),cmd);
}/*硬盘读入sec_cnt个扇区的数据到buf*/
static void read_from_sector(struct disk* hd, void* buf, uint8_t sec_cnt){uint32_t size_in_byte;if(sec_cnt==0){/*因为 sec_cnt 是自位变量,由主调函数将其赋值时,若为 256 则将最高位的 1 丢掉变为 0*/size_in_byte = 256 * 512;}else{size_in_byte = sec_cnt * 512;}insw(reg_data(hd->my_channel),buf,size_in_byte / 2);
}/*将buf中国的sec_cnt扇区的数据写入硬盘*/
static void write2sector(struct disk* hd, void* buf, uint8_t sec_cnt){uint32_t size_in_byte;if(sec_cnt==0){/*因为 sec_cnt 是自位变量,由主调函数将其赋值时,若为 256 则将最高位的 1 丢掉变为 0*/size_in_byte = 256 * 512;}else{size_in_byte = sec_cnt * 512;}outsw(reg_data(hd->my_channel),buf,size_in_byte/2);
}/*等待30秒*/
static bool busy_wait(struct disk* hd){struct ide_channel* channel = hd->my_channel;uint16_t time_limit = 30 * 1000; //等待30000毫秒while(time_limit -= 10 >= 0){if(!(inb(reg_status(channel))&BIT_ALT_STAT_BSY))return (inb(reg_status(channel))&BIT_ALT_STAT_DRQ);else mtime_sleep(10); //睡眠10毫秒}return false;
}/*硬盘读取 sec_cnt 个扇区到buf*/
void ide_read(struct disk* hd, uint32_t lba, void* buf, uint32_t sec_cnt){ASSERT(lba <= max_lba);ASSERT(sec_cnt > 0);lock_acquire(&hd->my_channel->lock);/*1先选择操作的硬盘*/select_disk(hd);uint32_t secs_op; //每次操作的扇区数uint32_t secs_done = 0; //已完成的扇区数while(secs_done < sec_cnt){if((secs_done+256)<=sec_cnt)secs_op = 256;else secs_op = sec_cnt - secs_done;/*2写入待读入的扇区数和起始扇区号*/select_sector(hd,lba+secs_done,secs_op);/*3执行的命令写入reg_cmd寄存器*/cmd_out(hd->my_channel,CMD_READ_SECTOR); //准备开始读取数据/******************* 阻塞自己的时机 ***************************** 在硬盘已经开始工作(开始在内部读数据或写数据)后才能阻塞自己,* 现在硬盘已经开始忙了,将自己阻塞,等待硬盘完成读操作后通过中断处理程序唤醒自己*//*硬盘完成操作后会发中断信号,后面介绍的硬盘中断处理程序 intr_hd_handler 会在该通道上执行“ sema_up(&channel->disk_done)”,从而唤醒当前的驱动程序*/sema_down(&hd->my_channel->disk_done);/*4 检查硬盘转改是否可读*//*醒来后开始执行下面的代码*/if(!busy_wait(hd)){ //若失败char error[64];sprintf(error,"%s read sector %d failed!!!!!!",hd->name,lba);PANIC(error);}/*5 把数据从硬盘的缓冲区读出*/read_from_sector(hd,(void*)((uint32_t)buf + secs_done * 512),secs_op);secs_done += secs_op;}lock_release(&hd->my_channel->lock);
}/*对于读硬盘来说,驱动程序阻塞自己是在硬盘开始读扇区之后,对于写硬盘来说,
驱动程序阻塞自己是在硬盘开始写扇区之后。总之,阻塞的时机一定是在硬盘开始真正忙活之后的那段“漫
长”的时间里*//*将buf中sec_cnt扇区数据写入硬盘*/
void ide_write(struct disk* hd, uint32_t lba, void* buf, uint32_t sec_cnt){ASSERT(lba<=max_lba);ASSERT(sec_cnt>0);lock_acquire(&hd->my_channel->lock);/*1.线选择操作的硬盘*/select_disk(hd);uint32_t secs_op; //每次操作的扇区数uint32_t secs_done = 0; //已经完成的扇区数while(secs_done < sec_cnt){if((secs_done+256)<=sec_cnt)secs_op = 256;else secs_op = sec_cnt - secs_done;/*2 写入待写入的扇区数和起始扇区号*/select_sector(hd, lba+secs_done, secs_op);/*3 执行的命令写入reg_cmd寄存器*/cmd_out(hd->my_channel,CMD_WRITE_SECTOR);/*4 检查硬盘状态是否可写*/if(!busy_wait(hd)){ //若失败char error[64];sprintf(error,"%s write sector %d failed!!!!!!",hd->name,lba);PANIC(error);}/*5 把数据从硬盘的缓冲区写进去*/write2sector(hd, (void*)((uint32_t)buf + secs_done * 512),secs_op);/*在硬盘响应期间阻塞自己*/sema_down(&hd->my_channel->disk_done);secs_done += secs_op;}/*醒来后开始释放锁*/lock_release(&hd->my_channel->lock);
}/*硬盘中断处理程序*/
void intr_hd_handler(uint8_t irq_no){ASSERT(irq_no == 0x2e || irq_no == 0x2f);uint8_t ch_no = irq_no - 0x2e;struct ide_channel* channel = &channels[ch_no];ASSERT(channel->irq_no == irq_no);/*不必担心此中断是否对应的是这一次的 expecting_intr,每次读写硬盘时会申请锁,从而保证了同步一致性*/if(channel->expecting_intr){channel->expecting_intr = false;sema_up(&channel->disk_done);/*读取状态寄存器使硬盘控制器认为此次的中断已被处理,从而硬盘可以继续执行新的读写*/inb(reg_status(channel));}
}/*硬盘数据结构初始化*/
void ide_init(void){printk("ide_init start\n");uint8_t hd_cnt = *((uint8_t*)(0x475)); //获取硬盘的数量printk(" ide_init hd_cnt:%d\n",hd_cnt);ASSERT(hd_cnt > 0);list_init(&partition_list);channel_cnt = DIV_ROUND_UP(hd_cnt,2); //一个 ide 通道上有两个硬盘,根据硬盘数量反推有几个 ide 通道struct ide_channel* channel;uint8_t channel_no = 0, dev_no = 0;/*处理每个通道上的硬盘*/while(channel_no < channel_cnt){channel = &channels[channel_no];sprintf(channel->name,"ide%d",channel_no);/*为每个 ide 通道初始化端口基址及中断向量*/switch(channel_no){case 0:channel->port_base = 0x1f0; //ide0通道的起始端口号是0x1f0channel->irq_no = 0x20+14; //从片8259A上倒数第二个中断引脚 硬盘,也就是ide0通道的中断向量号 , 0x20为起始中断号break;case 1:channel->port_base = 0x170; //ide1通道的起始端口号是0x170channel->irq_no = 0x20+15; //从片上最后一个中断引脚,我们用来相应ide1通道上的硬盘中断break;}channel->expecting_intr = false; //未向硬盘写入指令时不期待硬盘的中断lock_init(&channel->lock);/*初始化为0,目的是向硬盘控制器请求数据后,硬盘驱动sema_down此信号量会阻塞线程,直到硬盘完成后通过发中断,由中断处理程序将此信号量sema_up,唤醒线程*/sema_init(&channel->disk_done,0);register_handler(channel->irq_no,intr_hd_handler);/*分别获取两个硬盘的参数及分区*/while(dev_no < 2){struct disk* hd = &channel->devices[dev_no];hd->my_channel = channel;hd->dev_no = dev_no;sprintf(hd->name,"sd%c",'a'+channel_no*2+dev_no);identify_disk(hd);//获取硬盘参数if(dev_no!=0){ //内核本身的裸硬盘(hd60M.img)不处理partition_scan(hd,0); //扫描该硬盘上的分区}p_no=0,l_no=0;dev_no++;}dev_no = 0;channel_no++; //下一个channel}printk("\n all partition info\n");/*打印所有分区信息*/list_traversal(&partition_list,partition_info,(int)NULL);printk("ide_init done\n");
}
select_disk接受一个参数,硬盘指针hd,功能是选择待操作的硬盘是主盘或从盘 。原理是利用device寄存器中的 dev 位,该位为 0 表示是通道中的主盘,为 1 表示是通道的从盘。最后通过 outb 函数将变量 reg_device 写入硬盘所在通道的device 寄存器,这样就完成了主盘或从盘的选择。
select_sector接受3个参数,硬盘指针hd、扇区起始地址lba、扇区数sec_cnt,功能是向硬盘控制器写入起始扇区地址及要读写的扇区数 。
cmd_out:向通道channel发命令cmd,即写入操作命令(读或者写)
read_from_sector:硬盘读入sec_cnt个扇区的数据到buf
write2sector:将buf中的sec_cnt扇区的数据写入硬盘
busy_wait :通过BIT_ALT_STAT_BSY 判断 status 寄存器的 BSY 位是否为 1 ,如果为 1 ,则表示硬盘繁,这时候就调用 mtime_sleep(10)去休眠 10 毫秒。如果 BSY 位为 0 则表示硬盘不忙,接着在再次读取status寄存器,返回其 DRQ 位的值, DRQ 位为 1 表示硬盘己经准备好数据了。
对于读硬盘来说,驱动程序阻塞自己是在硬盘开始读扇区之后,对于写硬盘来说,驱动程序阻塞自己是在硬盘开始写扇区之后。总之,阻塞的时机一定是在硬盘开始真正忙活之后的那段“漫长”的时间里
13.2.5 获取硬盘信息,扫描分区表
本节该是检验它们的时候了,咱们用两件工作来验证,一是向硬盘发 identify 命令获取硬盘的信息,二是扫描分区表。

Linux中所有的设备都在/dev/目录下,硬盘命名规则是[x]d[y][n],其中只有字母 d 是固定的,其他带中括号的字符都是多选值,下面从左到右介绍各个字符。
x:表示硬盘分类,硬盘有两大类, IDE 磁盘和 SCSI 磁盘。h代表 IDE 磁盘, s代表 SCSI 磁盘,故 x取值为h和s.
d:表示disk,即磁盘
y:表示设备号,更多操作以区分第几个设备,取值范围是小写字符,其中a是第1个硬盘,b是第2个硬盘依此类推。
n:表示分区号。也就是一个硬盘上的第几个分区。分区以数字 1开始,依次类推。
咱们这里统一用 SCSI 硬盘的命名规则来命名虚拟硬盘hd60M.img 和 hd80M且恕。其中 hd60M.img 为 sda, hd80M.img 为 sdb o hd60M.img 是裸盘,没有文件系统和分区,因此咱们只处理 hd80M.img,将其上的主分区占据 sdb【1 ~4】,逻辑分区占据 sdb【5~】。
修改ide.c
/*用于记录总扩展分区的起始 lba ,初始为 O, partition_scan 时以此为标记*/
int32_t ext_lba_base = 0;
uint8_t p_no = 0, l_no = 0; //用来记录硬盘主分区和逻辑分区的下标
struct list partition_list; //分区队列/*构建一个 16 字节大小的结构体,用来存分区表项*/
struct partition_table_entry{uint8_t bootable; //是否可引导uint8_t start_head; //起始磁头号uint8_t start_sec; //起始扇区号uint8_t start_chs; //起始柱面号uint8_t fs_type; //分区类型uint8_t end_head; //结束磁头号uint8_t end_sec; //结束扇区号uint8_t end_chs; //结束柱面号/*更需要关注的时下面这两项*/uint32_t start_lba; //本分区起始扇区的 lba 地址uint32_t sec_cnt; //本分区的扇区数目
}__attribute__ ((packed)); //保证此结构是16字节大小/*引导扇区,mbr或ebr所在扇区*/
struct boot_sector{uint8_t other[446]; //引导代码struct partition_table_entry partition_table[4]; //分区表中有四项,供六十四字节uint16_t signature; //启动扇区的结束标志是 Ox55,0xaa,
}__attribute__ ((packed));/*将dst中len个相邻字节交换位置后存入buf*/
static void swap_pairs_bytes(const char* dst, char* buf, uint32_t len){uint8_t idx;for(idx=0;idx<len;idx+=2){/*buf中存储dst中两相邻袁术交换位置后的字符串*/buf[idx+1] = *dst++;buf[idx] = *dst++;}buf[idx] = '\0';
}/*获取硬盘参数信息*/
static void identify_disk(struct disk* hd){char id_info[512];select_disk(hd);cmd_out(hd->my_channel,CMD_IDENTIFY);/*向硬盘发送指令后便通过信号量阻塞自己,待硬盘处理完成后,通过中断处理程序将自己唤醒*/sema_down(&hd->my_channel->disk_done);/*醒来后开始执行下面的代码*/if(!busy_wait(hd)){ //若失败char error[64];sprintf(error,"%s identify failed!!!!!!",hd->name);PANIC(error);}read_from_sector(hd,id_info,1);char buf[64];uint8_t sn_start = 10*2, sn_len = 20, md_start = 27*2, md_len = 40;swap_pairs_bytes(&id_info[sn_start],buf,sn_len);printk(" disk %s info:\n SN: %s\n",hd->name,buf);memset(buf,0,sizeof(buf));swap_pairs_bytes(&id_info[md_start],buf,md_len);printk(" MODULE: %s\n",buf);uint32_t sectors = *(uint32_t*)&id_info[60 * 2];printk(" SECTORS: %d\n",sectors);printk(" CAPACITY: %dMB\n",sectors*512/1024/1024);
}/*扫描硬盘 hd 中地址为 ext_lba 的扇区中的所有分区*/
static void partition_scan(struct disk* hd, uint32_t ext_lba){struct boot_sector* bs = sys_malloc(sizeof(struct boot_sector));ide_read(hd, ext_lba, bs, 1);uint8_t part_idx = 0;struct partition_table_entry* p = bs->partition_table;/*遍历分区表4个分区表项*/while(part_idx++<4){if(p->fs_type == 0x5){ //若为扩展分区if(ext_lba_base!=0){/*子扩展分区的 start_lba 是相对于主引导扇区中的总扩展分区地址*/partition_scan(hd,p->start_lba + ext_lba_base);}else{//ext_lba_base为0表示是第一次读取引导块,页就是主引导记录所在的扇区/*记录下扩展分区的起始lba地址,后面所有扩展分区地址都相对于此*/ext_lba_base = p->start_lba;partition_scan(hd,p->start_lba);}}else if(p->fs_type != 0){ //若是有效分区类型if(ext_lba == 0){ //此时全是主分区hd->prim_parts[p_no].start_lba = ext_lba + p->start_lba;hd->prim_parts[p_no].sec_cnt = p->sec_cnt;hd->prim_parts[p_no].my_disk = hd;list_append(&partition_list,&hd->prim_parts[p_no].part_tag);sprintf(hd->prim_parts[p_no].name,"%s%d",hd->name,p_no+1);p_no++;ASSERT(p_no < 4); //0,1,2,3}else{ //逻辑分区hd->logic_parts[l_no].start_lba = ext_lba + p->start_lba;hd->logic_parts[l_no].sec_cnt = p->sec_cnt;hd->logic_parts[l_no].my_disk = hd;list_append(&partition_list, &hd->logic_parts[l_no].part_tag);sprintf(hd->logic_parts[l_no].name, "%s%d", hd->name, l_no + 5); // 逻辑分区数字是从5开始,主分区是1~4.l_no++;if (l_no >= 8) // 只支持8个逻辑分区,避免数组越界return;} }p++;}sys_free(bs);
}/*打印分区信息*/
static bool partition_info(struct list_elem* pelem, int arg UNUSED){struct partition* part = elem2entry(struct partition, part_tag, pelem);printk(" %s start_lba:0x%x,sec_cnt:0x%x\n",part->name,part->start_lba,part->sec_cnt);/*在此处 return false与函数本身功能无关,只是为了让主调函数 list_traversal 继续向下遍历元素*/return false;
}
swap_pairs_bytes:用来处理identify命令的返回信息,硬盘参数信息是以字为单位的,包括偏移、长度的单位都是字,在这16位的字中,相邻字符的位置是互换的,所以通过此函数来做转换。
相关文章:
操作系统真象还原:编写硬盘驱动程序
第13章-编写硬盘驱动程序 这是一个网站有所有小节的代码实现,同时也包含了Bochs等文件 13.1 硬盘及分区表 13.1.1 创建从盘及获取安装的磁盘数 要实现文件系统,必须先有个磁盘介质,虽然咱们己经有个虚拟磁盘 hd60M.img,但它只…...
)
firewalld防火墙(二)
一:firewalld高级配置 1:关于iptables的知识 iptables 是Linux系统中传统的命令行防火墙管理工具,它基于内核的netfilter框架工作,用于配置和管理网络规则集,比如过滤(允许/拒绝)进出的数据包…...

Android-悬浮窗口
在Android系统中,如果应用需要弹出一个悬浮窗口,就需要申请一项特殊权限 <uses-permission android:name"android.permission.SYSTEM_ALERT_WINDOW"/>在Android O之前的系统中申请了该权限后,再给对应的window设置 WindowM…...

打破僵局:Foxit Reader无法打开的终极解决方案
打破僵局:Foxit Reader无法打开的终极解决方案 在数字化阅读时代,Foxit Reader作为一款广受欢迎的PDF阅读器,其打不开的问题无疑会给用户带来诸多不便。本文将为您提供全面的解决方案,从基础检查到高级技巧,确保您能够…...

[调试] JTAG下运行正常,从QSPI或者SD卡启动则无响应,如何查找问题
[调试] JTAG下运行正常,从QSPI或者SD卡启动则无响应,如何查找问题 一、问题现象二、用自定义fsbl替代系统默认的fsbl1. 新建fsbl_new2. 如果提示缺少xilffs库3. 使能调试信息输出 三. 启动成功和失败情况下的典型输出1. JTAG启动模式: 正常加载2. QSPI启…...

Linux内核 -- 多线程之wait_event用法
Linux Kernel 中 wait_event 的高级用法及注意事项 在Linux内核编程中,wait_event 系列函数是用于实现进程等待和事件通知机制的重要工具。本文将详细介绍 wait_event 的高级用法以及注意事项。 1. 基本用法 wait_event 系列宏主要包括以下几种形式: …...
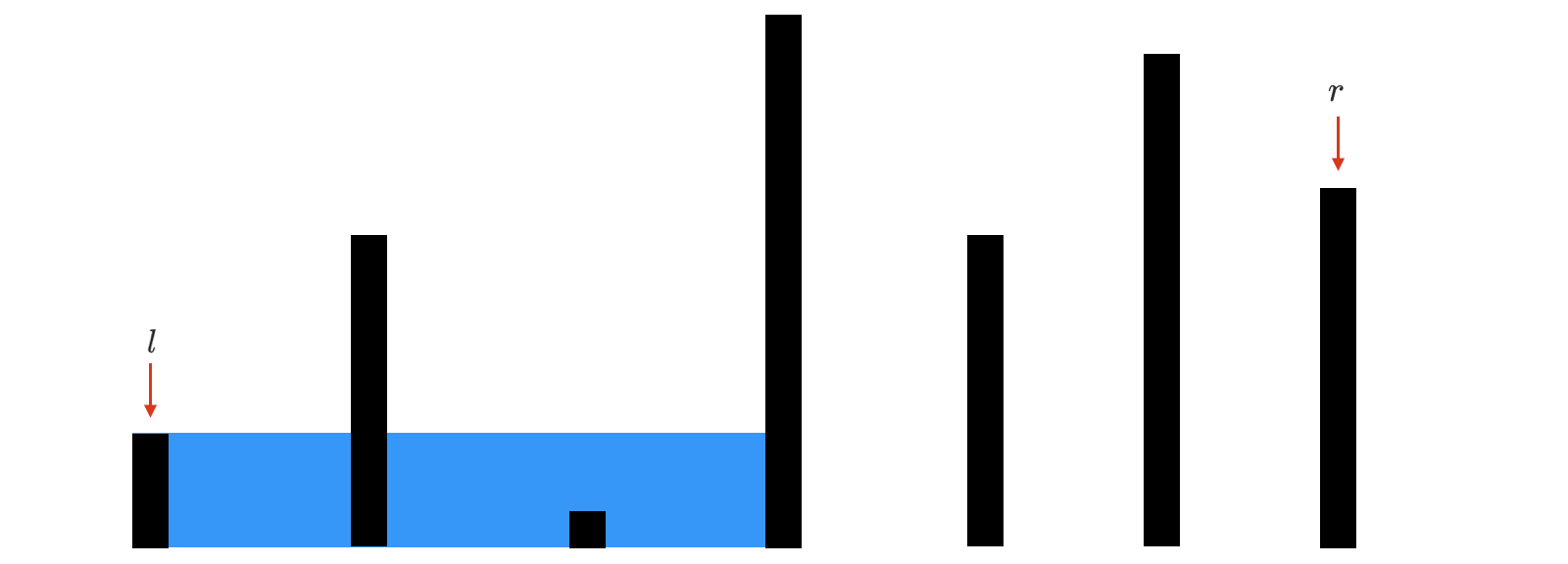
双指针系列第 8 篇:盛水最多的容器。几句话讲明白!
Leetcode 题目链接 思路 取首尾双指针和水量如下所示,设高度函数为 h ( i ) h(i) h(i),在下图中 h ( l ) < h ( r ) h(l) < h(r) h(l)<h(r)。 观察以 l l l 为左边界所能构成的其他水量,与矮的右边界搭配结果如下。 与高的…...

c++高阶-1-模板
文章目录 模板一、模板基本语法二、函数模板1.基本语法2.函数模板注意事项3.普通函数和函数模板区别4.普通函数和函数模板调用规则 三、类模板1.基本语法2.类模板和函数模板的区别3.类模板中成员函数调用时机4.类模板对象做函数参数5.类模板与继承6.成员函数的类外实现 模板 一…...

.net core 的 winform 的 浏览器控件 WebView2
在.NET Core WinForms应用程序中,没有直接的“浏览器控件”,因为WinForms不支持像WebBrowser控件那样的功能。但是,你可以使用WebView2控件,它是一个基于Chromium的浏览器内核,可以在WinForms应用程序中嵌入Web内容。 …...
Django QuerySet对象,all()方法
all()方法 在Django中,all()方法是QuerySet对象的一个方法,用于获取模型的所有实例。 当你调用ModelName.objects.all()时,Django会生成一个SQL查询,从数据库中获取该模型的所有记录,并返回一个QuerySet对象…...

自动生成网站sitemap
要在 Next.js 和 Contentlayer 项目中实现自动生成 Sitemap 的功能,你可以编写一个脚本,在每次生成文档后自动生成 Sitemap。以下是一个示例脚本,你可以根据自己的需求进行调整。 步骤 1:安装必要的依赖 首先,你需要…...

中国经济昆虫志(55卷)
中国经济昆虫志,共55卷,内容包括概述、形态特征、分类等。各级分类单元均编有检索表,每个种有特征描述、地理分布,有的还记载有生活习性和防治方法。为便于鉴定,绘制有特征图和彩色图。 包括鞘翅目天牛科、半翅目蝽科、…...

linux环境安装elasticsearch缓存数据库和Kibana客户端
linux环境安装elasticsearch缓存数据库,今天我们安装7.17.18版本,并分析遇到的问题。 一、elasticsearch安装运行 1、直接下载 wget https://artifacts.elastic.co/downloads/elasticsearch/elasticsearch-7.17.18-linux-x86_64.tar.gz2、解压 tar -…...

OpenSSL的一些使用案例
目录 一、介绍 二、基本使用 1、Shell (1)文件加解密 (2)生成密钥文件 2、API (1)md5sum (2)AES256加解密 一、介绍 本篇博客重点不是详细描述 OpenSSL 的用法,只…...
常用字符串方法<python>
导言 在python中内置了许多的字符串方法,使用字符串方法可以方便快捷解决很多问题,所以本文将要介绍一些常用的字符串方法。 目录 导言 string.center(width[,fillchar]) string.capitalize() string.count(sub[,start[,end]]) string.join(iterabl…...
线程池666666
1. 作用 线程池内部维护了多个工作线程,每个工作线程都会去任务队列中拿取任务并执行,当执行完一个任务后不是马上销毁,而是继续保留执行其它任务。显然,线程池提高了多线程的复用率,减少了创建和销毁线程的时间。 2…...
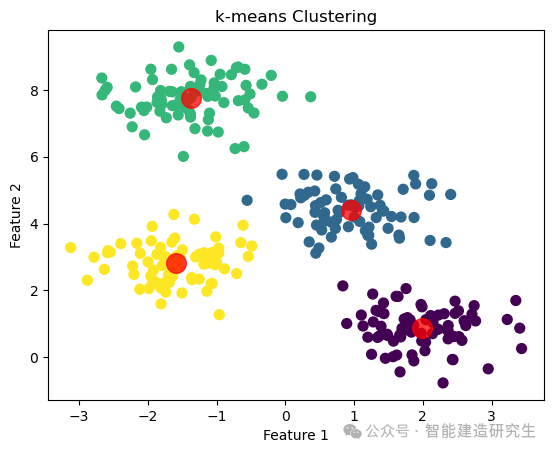
Python28-5 k-means算法
k-means 算法介绍 k-means 算法是一种经典的聚类算法,其目的是将数据集分成 ( k ) 个不同的簇,每个簇内的数据点尽可能接近。算法的基本思想是通过反复迭代优化簇中心的位置,使得每个簇内的点与簇中心的距离之和最小。k-means 算法的具体步骤…...

主流国产服务器操作系统技术分析
主流国产服务器操作系统 信创 "信创",即信息技术应用创新,作为科技自立自强的核心词汇,在我国信息化建设的进程中扮演着至关重要的角色。自2016年起步,2020年开始蓬勃兴起,信创的浪潮正席卷整个信息与通信技…...
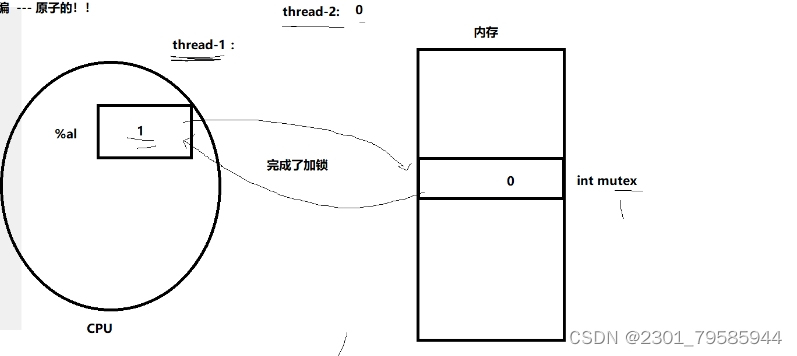
【Linux】线程封装与互斥(万字)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目录 文章目录 前言 C多线程的用法 对原生线程进行一次封装 理解pthread线程 Linux线程互斥 进程线程间的互斥相关背景概念 互斥量mutex 操作共享变量会有问题的售票…...

5分钟教你部署MySQL8.0环境
此方法基于Windows操作系统! 一、在MySQL官网单击downloads(下载)MySQLhttps://www.mysql.com/cn/ 选择在Windows操作系统下载 二、选择合适的版本 推荐下载第二种,安装时离线安装即可 三、安装MySQL8.0 1、找到MySQL下载完成…...

Git-RSCLIP遥感图文检索实战:手把手教你用一句话搜卫星图
Git-RSCLIP遥感图文检索实战:手把手教你用一句话搜卫星图 1. 为什么需要遥感专用图文检索模型? 1.1 通用模型的局限性 当我们尝试用普通图像检索模型处理卫星图像时,经常会遇到以下问题: 视角差异:日常照片多是水平…...

【边缘AI部署生死线】:为什么你的C节点总在OTA升级时崩溃?——静态链接剥离、符号表裁剪与段重定向三重编译加固术
第一章:C语言边缘计算节点轻量化编译方法概论在资源受限的边缘计算场景中,C语言因其零成本抽象、内存可控性及广泛工具链支持,成为构建轻量级节点程序的首选。然而,传统编译流程常引入冗余符号、未使用库函数及调试信息࿰…...

SolidWorks实用技巧:从基础操作到高效建模
1. SolidWorks基础操作:从零开始的正确姿势 第一次打开SolidWorks时,很多新手会被密密麻麻的工具栏和复杂的界面吓到。其实只要掌握几个核心操作逻辑,就能快速上手。我刚开始用SolidWorks时也走过不少弯路,现在把这些经验分享给你…...

GTE文本向量应用案例:新闻事件监控与社交媒体分析实战解析
GTE文本向量应用案例:新闻事件监控与社交媒体分析实战解析 1. 项目背景与核心价值 GTE文本向量-中文-通用领域-large是一个基于ModelScope平台的多任务自然语言处理应用,专为中文文本分析场景设计。在信息爆炸的时代,如何从海量文本数据中快…...

BH1750光照传感器驱动开发与I²C通信实现
1. BH1750光照强度传感器技术解析与嵌入式驱动实现1.1 传感器核心特性与工程价值BH1750是一种基于ROHM原装BH1750FVI芯片的数字环境光传感器(Ambient Light Sensor, ALS),专为高精度、低功耗光照度测量而设计。其核心价值在于将传统模拟光敏元…...

基于StructBERT的智能客服相似问句匹配:JavaScript前端交互实现
基于StructBERT的智能客服相似问句匹配:JavaScript前端交互实现 你有没有遇到过这种情况?在智能客服里问了一个问题,比如“怎么修改密码”,结果机器人给你推荐了一堆“密码强度要求”、“忘记密码怎么办”的答案,就是…...

告别SQL与文档!通义灵码2.5的MCP生态如何让数据库开发效率飙升300%
1. 从SQL苦手到数据库自由:通义灵码2.5的MCP革命 记得三年前我刚接手一个电商项目时,为了写一个包含五表联查的订单统计SQL,整整折腾了一下午——反复查阅MySQL文档、调试JOIN语句、优化索引,最后还因为漏了个外键约束导致生产环境…...
)
vxe-table隐藏技巧:5分钟实现Excel式复杂表格(带自定义打印配置)
vxe-table隐藏技巧:5分钟实现Excel式复杂表格(带自定义打印配置) 在数据密集型的现代Web应用中,表格组件一直是前端开发的核心需求之一。传统的表格解决方案往往难以满足企业级应用对复杂交互、高性能渲染和深度定制的要求。vxe-t…...

python-flask超市库存退货管理系统的设计与实现
目录需求分析技术选型数据库设计功能模块开发测试与部署迭代优化项目技术支持可定制开发之功能创新亮点源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作需求分析 明确超市库存退货管理系统的核心功能需求,包括商品信息管理、退货…...

数据结构___线性表
2.1线性表的定义(逻辑结构):●定义: 具有相同数据类型的N(N>0)个数据元素的有限序列,其中N为表长,当N 0 时,线性表时一个空表.表示 L (a1,a2,...,ai, ai1, ..., an)●每个数据元素所占空间一样大.有限的序列. 注意 用数组实现线性表下标从0开始.●位序 :从1开始的,一个线…...