蓝桥杯基础技能训练
51单片机系统浓缩图

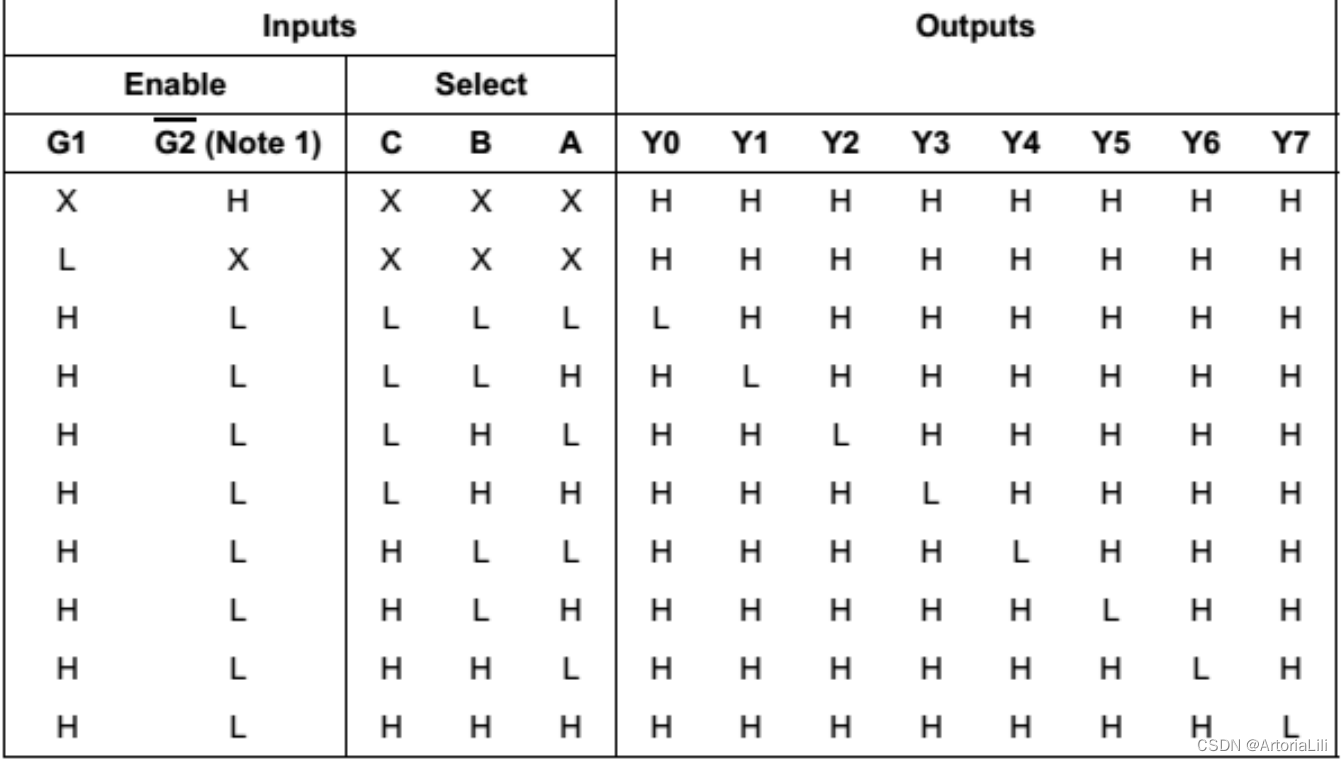
1. HC138译码器
· 用3个输入引脚,实现8个输出引脚,而且这个八个输出引脚中只要一个低电平,所以我们只需要记住真值表就行
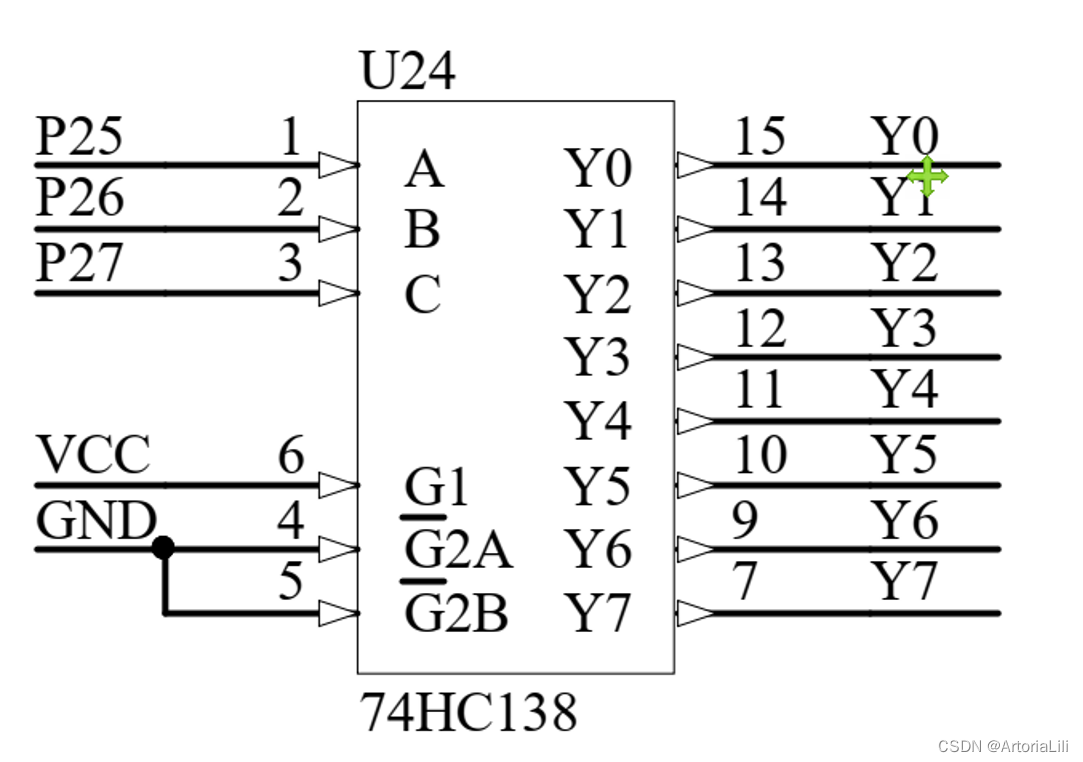
#include "reg52.h" sbit HC138_A = P2^5; sbit HC138_B = P2^6; sbit HC138_C = P2^7; void Init74HC138(unsigned char n){switch(n){case 4: //LEDHC138_A = 0;HC138_B = 0;HC138_C = 1;break;case 5: //蜂鸣器与译码器HC138_A = 1;HC138_B = 0;HC138_C = 1;break;case 6: //数码管位置HC138_A = 0;HC138_B = 1;HC138_C = 1;break;case 7: //数码管内容HC138_A = 1;HC138_B = 1;HC138_C = 1;break;case 8: //关闭所有设备HC138_A = 0;HC138_B = 0;HC138_C = 0;break;}}
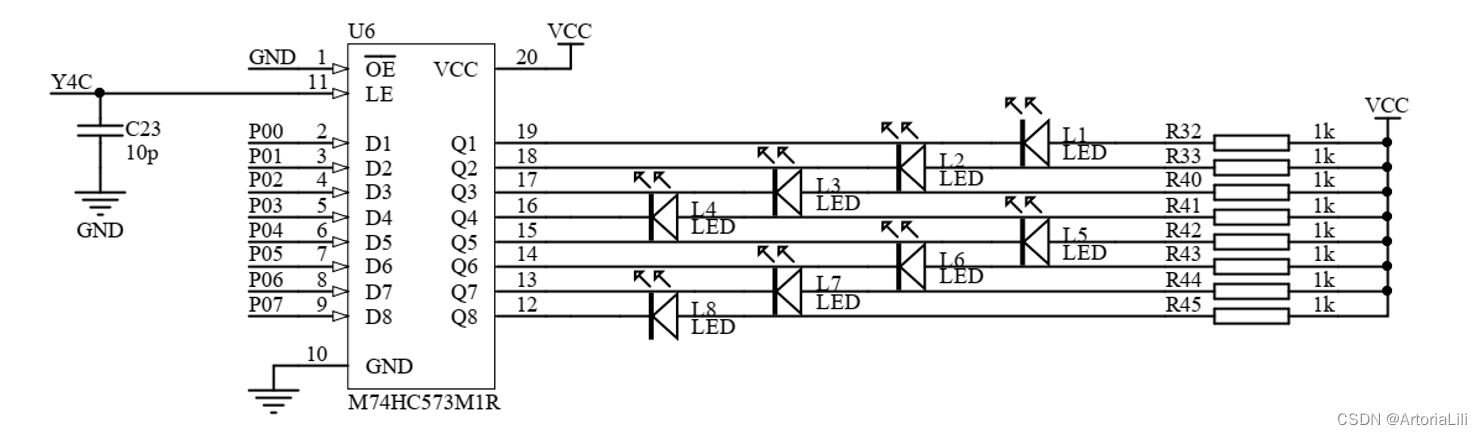
2. HC573
573锁存器有20个引脚,D1~D8是数据输入端,Q1~Q8是数据输出端,LE为锁存控制端。当锁存使能端LE为高时,573的锁存对于数据是透明的(也就是说输出同步)。当锁存使能变低时,符合建立时间和保持时间的数据会被锁存。使用其可以替换HC138,两个功能相同
#include "reg52.h"
void SelectHC573(unsigned channel)
{switch(channel){case 4:P2 = (P2 & 0x1f) | 0x80; break;case 5:P2 = (P2 & 0x1f) | 0xa0; break;case 6:P2 = (P2 & 0x1f) | 0xc0; break;case 7:P2 = (P2 & 0x1f) | 0xe0; break;case 0:P2 = (P2 & 0x1f) | 0x00; break;}P2 = (P2 & 0x1f) | 0x00;
}两者的功能相同,因此我们可以简便的来替代一下
void InitHC138 (unsigned char n)
{switch(n){case 4:P2=(P2&0x1f)|0x80;break;case 5:P2=(P2&0x1f)|0xa0;break;case 6:P2=(P2&0x1f)|0xc0;break;case 7:P2=(P2&0x1f)|0xe0;break;}
}3. 控制LED
// 任务:
/* 先让奇数的灯闪,再让偶数的灯闪,然后所有的灯闪3下,最后依次点亮所有的灯,然后再依次熄灭,然后循环 */void LEDRunning(){char i = 0;P0 = 0xaa;Delay(60000);P0 = 0x55;Delay(60000); for(i = 0; i < 3; i++){P0 = 0x00; //全灭Delay(60000);P0 = 0xff; //全亮Delay(60000);}for(i = 0; i < 8; i++){P0 <<= 1; //按顺序依次闪过Delay(60000);}for(i = 0; i < 8; i++){P0 <<= 1;P0 |= 1; //熄灭Delay(60000);}
}main(){Init74HC138(4); //打开LED的138 while(1){LEDRunning(); }}
4. 数码管

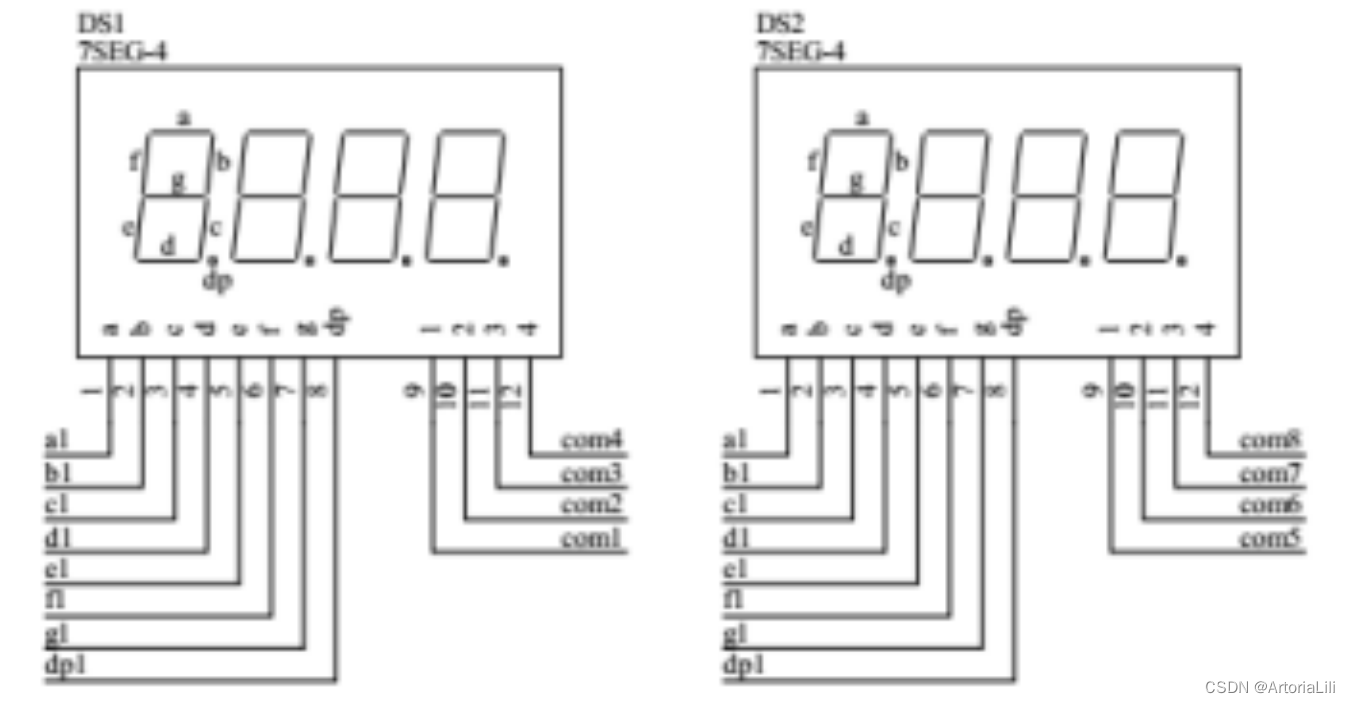
其中a、b、c、d、e、f、g、dp引脚分别对应8个段码,该8个引脚通过74HC573锁存器与单片机的P0端口相连。另外有com1~com4四个公共控制脚,该应用为高电平则使能对应位的数码管。两个F3461BH一共有8个com控制引脚,也是通过74HC573锁存器与单片机的P0端口相连的。因此,在操控数码管显示的过程中也离不开74HC138译码器和74HC573锁存器。
// 段码
unsigned char code SMG_Duanma[18] = {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};// 数码管延时函数
void Delay2(unsigned int t)
{while(t--){Display_SMG();}
}//数码管显示函数
void DisplaySMG_bit(unsigned char value,unsigned char pos) //value为内容,pos为所填位置、
{Init74HC138(6);P0 = (0x01 << pos);Init74HC138(7);P0 = value;}任务:
在 8 位数码管中,左边 4 位数码管显示 年份“2018”,接着 2 位是分隔符“--”,靠右的2 位数码管显示月份。从 1 月份开始,每隔一段时间加 1 个月,到 12 月之后又从 1 月开始递增, 如此循环往复。
#include "reg52.h"unsigned char code SMG_duanma[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
unsigned char yue=1;
void Delay(unsigned int t)
{while(t--);
}void InitHC138 (unsigned char n) //ͨµÀÑ¡Ôñ
{switch(n){case 4:P2=(P2&0x1f)|0x80;break;case 5:P2=(P2&0x1f)|0xa0;break;case 6:P2=(P2&0x1f)|0xc0;break;case 7:P2=(P2&0x1f)|0xe0;break;}
}void ShowSMG_Bit(unsigned char dat,unsigned int pos)
{InitHC138(6); //ÊýÂë¹ÜµÄλÖÃP0=0X01<<pos;InitHC138(7); //ÊýÂë¹ÜµÄÄÚÈÝP0=dat;
}void Display_SMG()
{ShowSMG_Bit(SMG_duanma[2],0);Delay(500);ShowSMG_Bit(SMG_duanma[0],1);Delay(500);ShowSMG_Bit(SMG_duanma[1],2);Delay(500);ShowSMG_Bit(SMG_duanma[8],3);Delay(500);ShowSMG_Bit(SMG_duanma[16],4);Delay(500);ShowSMG_Bit(SMG_duanma[16],5);Delay(500);ShowSMG_Bit(SMG_duanma[yue/10],6);Delay(500);ShowSMG_Bit(SMG_duanma[yue%10],7);Delay(500);}void Delay2(unsigned int t)
{while(t--){Display_SMG();}
}void InitSystem()
{InitHC138(5); //¹Ø±Õ¼ÌµçÆ÷P0=0x00;InitHC138(4); //´ò¿ªµÆP0=0xff;P2=0x00; //¹Ø±ÕHC138
}void main()
{InitSystem();while(1){Display_SMG();yue++;if(yue>12)yue=1;Delay2(100);}
}5. 独立按键
一般情况下,独立按键有两个引脚,其中一个通过上拉电阻接到单片机的I/O端口,另外一端接地。也就是说,平时按键没有动作的时候,输出的是高电平,如果有按下动作发生,则输出的是低电平。那么,我们在程序设计的时候,只要扫描跟按键引脚相连的I/O端口,如果发现有低电平产生,则判定该按键处于按下状态。有些时候,电路或者外围有电磁干扰,也会使单片机的I/O端口产生低电平,这种干扰信号会让单片机误认为是按键动作。所以,在扫描按键的时候应该做去抖动处理,把干扰信号过滤掉,从而获得准确的按键状态信号。
// 按键扫描
void ShowKeyNum(unsigned char value){Init74HC138(6); //数码管位置P0 = 0x01;Init74HC138(7); //数码管内容P0 = value;}void ScanKeys(){if(S7 == 0){Delay(200);if(S7 == 0){while(S7 == 0);ShowKeyNum(SMG_NoDot[1]);}}if(S6 == 0){Delay(200);if(S6 == 0){while(S6 == 0);ShowKeyNum(SMG_NoDot[2]);}}if(S5 == 0){Delay(200);if(S5 == 0){while(S5 == 0);ShowKeyNum(SMG_NoDot[3]);}}if(S4 == 0){Delay(200);if(S4 == 0){while(S4 == 0);ShowKeyNum(SMG_NoDot[4]);}}}6 .矩阵键盘的使用
与独立按键不同的是,按键的两个引脚都分别连接的单片机的I/O端口,一个作为行信号,另外一个作为列信号。
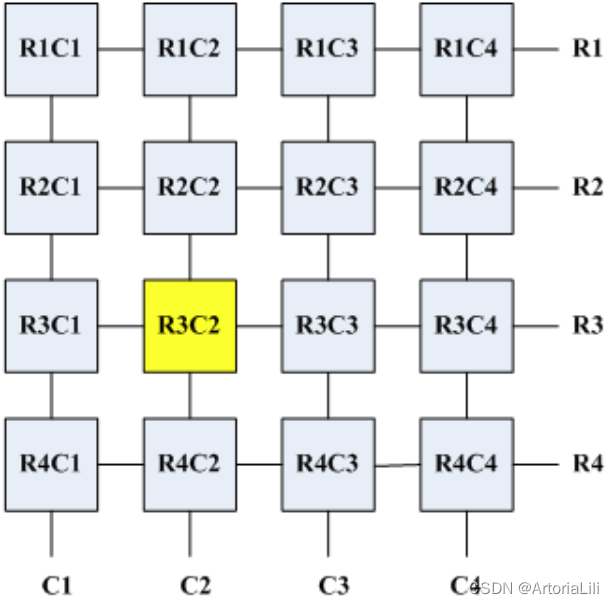
对与矩阵键盘,我们只能逐行扫描,然后读取列的状态信号。如果R3行输出低电平,那么黄色按键如果有按下动作的话,那读取C2列信号也应该为低电平,而该行上其他没有按下动作的按键的列信号则为高电平。因此,我们可以得到矩阵键盘的基本扫描步骤:
<1> R1输出低电平,R2、R3、R4输出高电平,逐个读取判断列信号,如果都为高电平则R1行上没有按键按下。
<2> R2输出低电平,R1、R3、R4输出高电平,逐个读取判断列信号。
<3> R3输出低电平,R1、R2、R4输出高电平,发现C2列信号为低电平,那么可以判断得R3行的C2列的按键有按下动作。
<4> R4输出低电平,R1、R3、R4输出高电平,逐个读取判断列信号。
任务:1、将 CT107D 上 J5 处跳帽接到 1~2 引脚,使 S4 到 S19 成为 4X4 的矩阵键盘。2、系统上电后,关闭蜂鸣器,关闭继电器,关闭 8 个 LED 灯。3、循环扫描矩阵键盘状态,发现有按键按下,等待其松开后,在数码管的最左边 1 位显示相应的数字。从左至右,从上到下,依次显示“0”到“F”。即按下 S7,显示“0”,按下 S11 显示“1”,按下 S15 显示“2”,按下 S6 显示“4”...依次类推。
#include "reg52.h"
unsigned char code SMG_duanma[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
sfr P4=0xc0;
sbit R1=P3^0;
sbit R2=P3^1;
sbit R3=P3^2;
sbit R4=P3^3;sbit C4=P3^4;
sbit C3=P3^5;
sbit C2=P4^2;
sbit C1=P4^4;void InitHC138 (unsigned char n) //ͨµÀÑ¡Ôñ
{switch(n){case 4:P2=(P2&0x1f)|0x80;break;case 5:P2=(P2&0x1f)|0xa0;break;case 6:P2=(P2&0x1f)|0xc0;break;case 7:P2=(P2&0x1f)|0xe0;break;}
}void DisplayKeyNum(unsigned char value)
{InitHC138(6);P0=0x01;InitHC138(7);P0=value;
}unsigned char keynum;
void ScanKey()
{//µÚÒ»ÐÐR1=0;R2=R3=R4=1;C1=C2=C3=C4=1;if(C1==0){while(C1==0);keynum=0;DisplayKeyNum(SMG_duanma[keynum]);}else if(C2==0){while(C2==0);keynum=1;DisplayKeyNum(SMG_duanma[keynum]);}else if(C3==0){while(C3==0);keynum=2;DisplayKeyNum(SMG_duanma[keynum]);}else if(C4==0){while(C4==0);keynum=3;DisplayKeyNum(SMG_duanma[keynum]);}//µÚ¶þÐÐR2=0;R1=R3=R4=1;C1=C2=C3=C4=1;if(C1==0){while(C1==0);keynum=4;DisplayKeyNum(SMG_duanma[keynum]);}else if(C2==0){while(C2==0);keynum=5;DisplayKeyNum(SMG_duanma[keynum]);}else if(C3==0){while(C3==0);keynum=6;DisplayKeyNum(SMG_duanma[keynum]);}else if(C4==0){while(C4==0);keynum=7;DisplayKeyNum(SMG_duanma[keynum]);}//µÚÈýÐÐR3=0;R2=R1=R4=1;C1=C2=C3=C4=1;if(C1==0){while(C1==0);keynum=8;DisplayKeyNum(SMG_duanma[keynum]);}else if(C2==0){while(C2==0);keynum=9;DisplayKeyNum(SMG_duanma[keynum]);}else if(C3==0){while(C3==0);keynum=10;DisplayKeyNum(SMG_duanma[keynum]);}else if(C4==0){while(C4==0);keynum=11;DisplayKeyNum(SMG_duanma[keynum]);}//µÚËÄÐÐR4=0;R1=R2=R3=1;C1=C2=C3=C4=1;if(C1==0){while(C1==0);keynum=12;DisplayKeyNum(SMG_duanma[keynum]);}else if(C2==0){while(C2==0);keynum=13;DisplayKeyNum(SMG_duanma[keynum]);}else if(C3==0){while(C3==0);keynum=14;DisplayKeyNum(SMG_duanma[keynum]);}else if(C4==0){while(C4==0);keynum=15;DisplayKeyNum(SMG_duanma[keynum]);}}void InitSystem()
{InitHC138(5); P0=0x00;InitHC138(4);P0=0xff;P2=0x00;
}void main()
{InitSystem();while(1){ScanKey();}}7. 中断相关寄存器
一般来说,51单片机有5个中断源(忽略定时/计数器2),分2个优先级,这个5个中断源按照自然优先级从高到低依次为:
外部中断0:INT0
定时/计数器0:TF0
外部中断1:INT1
定时/计数器1:TF1
串口中断:RI/TI
中断相关的寄存器有4个,每个寄存器都是可以位寻址的,这该编程带来了方便。 其中2个为控制寄存器:IE寄存器与IP寄存器:

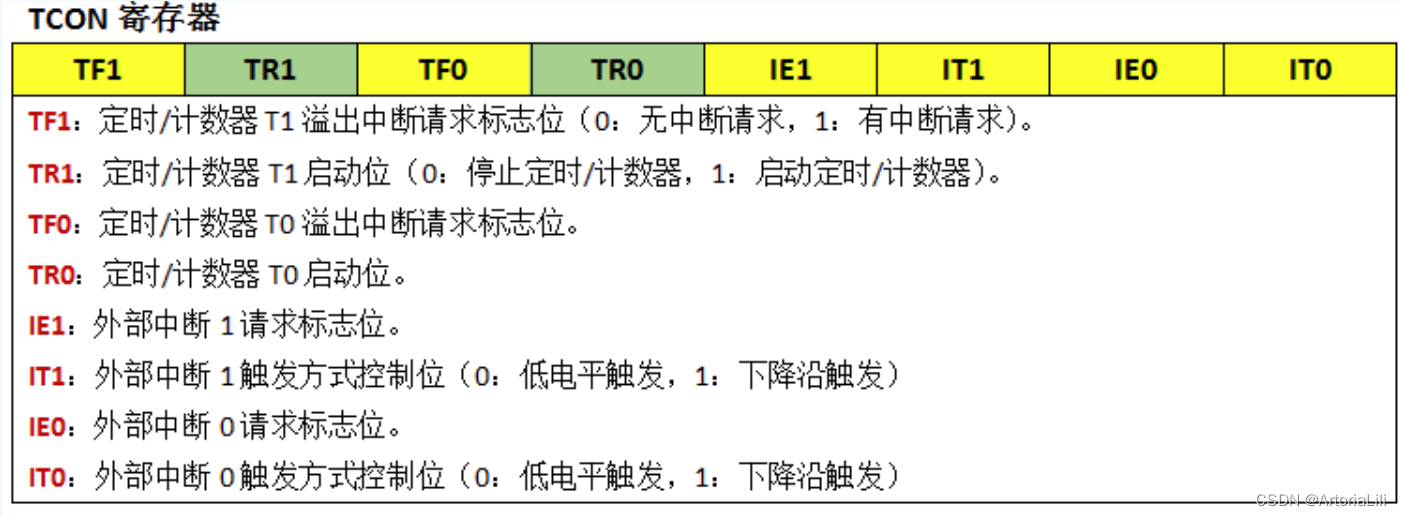
 另外2个为中断请求标志:TCON寄存器与SCON寄存器:
另外2个为中断请求标志:TCON寄存器与SCON寄存器:

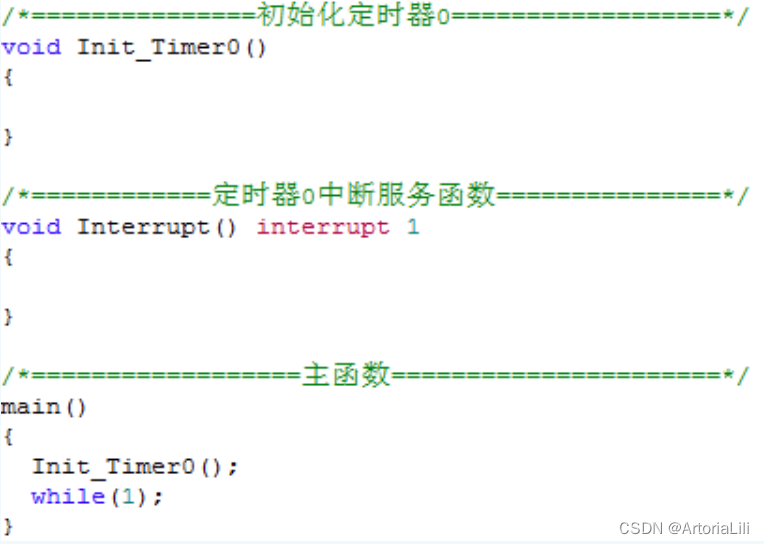
一般情况下,中断的处理函数有两个,其一为中断初始化函数,其二为中断服务函数。初始化函数就是一个普通的函数,而中断服务函数却有特殊的格式要求:
<1> 中断函数没有返回值,也不能带参数。
<2> 函数名后面要跟一个关键字interrupt,说明这是一个中断服务函数。
<3> 在关键字interrupt后面要跟上中断号,说明这个中断服务函数是为那个中断服务的。
8.定时器
51单片机有两个定时/计数器T0和T1,为16位加法计数器,由低8位TLx和高8位THx两个寄存器组成,最大计数值为65535个计数脉冲。
该加1计数器的计数脉冲来源有2个:
<1> 系统时钟振荡器输出的12分频。
<2> T0或T1引脚输入的外部脉冲信号。
每接收到一个计数脉冲,计数器就会加1,当计数值累计至全为1时(8位255,13位8191,16位65535),再输入一个计数脉冲,计数器便会溢出回零,并且计数器的溢出是TCON寄存器的TF0或TF1位置1,同时向内核提出中断请求。如果定时/计数器工作于定时模式,则表示间隔定时时间到,如果工作与计数模式,则表示计数值已满。
假设单片机的外部晶振为12MHz,那么,经过12分频后输入计数器的计数脉冲为1MHz,即每个脉冲的周期为1us。因此定时器T0的16位工作模式最大的定时时间为65535us,65.5ms。如果要定时10ms的话,计数器就不能够从0开始计数了,必须给它一个计数初值。怎么计算这个初值呢?
要定时10ms,则相当于计数10000个脉冲后计数器的值就到达65535了,那么开始计数的这个地方就是计数初值。
65535 - 10000 = 55535 = 0xd8ef
把这个计算得到的初值写入TH0和TL0寄存器即可:
TH0 = 0xd8;或者 TH0 = (65535 - 10000) / 256;
TL0 = 0xef; 或者 TL0 = (65535 - 10000) % 256;
定时/计数器相关的寄存器除了计数初值寄存器THx和TLx之外,就是TMOD寄存器和TCON寄存器,务必掌握。
<1> TMOD模式控制寄存器,不能进行位寻址,只能字节操作。
<2> TCON中断标志寄存器
定时/计数器的程序设计中,通常有两个函数:初始化函数和中断服务函数。
在初始化函数中,一般需要进行以下几个配置:
<1> 配置工作模式,即对TMOD寄存器编程。
<2> 计算技术初值,即对THx和TLx寄存器进行赋值。
<3> 使能定时/计数器中断,即ET0或ET1置1。
<4> 打开总中断,即EA =1。
<5> 启动定时器,即TR0或TR1置1。
在中断服务函数中,一般需要进行以下的编程:
<1> 如果不是自动重装模式,需要对THx和TLx重新赋值。
<2> 进行间隔定时到达的逻辑处理(越少越好)。
1、系统上电后,关闭蜂鸣器,关闭继电器,关闭 8 个 LED 灯。2、利用定时/计数器 T0 的模式 1 实现 50ms 的间隔定时。3、在 50ms 间隔定时的基础上,每隔 1 秒 L1 指示灯闪烁一次,即 L1 指示灯循环点亮0.5 秒,熄灭 0.5 秒。4、每隔 10 秒 L8 指示灯闪烁 1 次,即 L1 指示灯循环点亮 5 秒,熄灭 5 秒
#include "reg52.h" sbit HC138_A = P2^5;
sbit HC138_B = P2^6;
sbit HC138_C = P2^7; sbit LED1 = P0^0;
sbit LED2 = P0^1; void Init74HC138(unsigned char n)
{switch(n){case 4:HC138_A = 0;HC138_B = 0;HC138_C = 1;break;case 5:HC138_A = 1;HC138_B = 0;HC138_C = 1;break;case 6:HC138_A = 0;HC138_B = 1;HC138_C = 1;break;case 7:HC138_A = 1;HC138_B = 1;HC138_C = 1;break;case 8:HC138_A = 0;HC138_B = 0;HC138_C = 0;break;}
}
/*===============初始化定时器0==================*/
void Init_Timer0()
{TMOD = 0x01; //16位定时模式TH0 = (65536 - 50000) / 256; //定时50msTL0 = (65536 - 50000) % 256;ET0 = 1; //使能定时器T0中断EA = 1; //使能总中断 TR0 = 1; //启动定时器T0
}
/*============定时器0中断服务函数===============*/
unsigned char count = 0;
void SeviceTimer0() interrupt 1
{TH0 = (65536 - 50000) / 256;TL0 = (65536 - 50000) % 256;count++;if(count == 10) //0.5秒定时到{LED1 = ~LED1;}if(count == 20) //1秒定时到{LED2 = ~LED2;count = 0;}
}
/*==================主函数======================*/
main()
{Init74HC138(4);Init_Timer0();while(1);
}9. PWM控制
1、系统上电后,关闭蜂鸣器,关闭继电器,关闭 8 个 LED 灯。2、PWM 脉宽信号的频率为 100Hz。3、L1 指示灯有 4 种亮度,分别是:完全熄灭、10%的亮度、50%的亮度和 90%的亮度。4、按下 S7 按键,循环切换 L1 指示灯的四种亮度模式
#include "reg52.h"
#include "HC573.h"
#includd "SMG.h"sbit L1 = P0^0;
sbit S7 = P3^0;/*¶¨Ê±Æ÷Ïà¹Ø*/
unsigned char count = 0;void InitTimer0()
{TMOD = 0x01; //ʹÓö¨Ê±Æ÷1µÄ16λģʽTH0 = (65535 - 100)/256 // ¼ÆÊý³õÖµTL0 = (65535 - 100)%256ET0 = 1;EA = 1;TR0 = 1;
}void ServiceTimer0() interrupt 1
{TH0 = (65535 - 100)/256 // ¼ÆÊý³õÖµTL0 = (65535 - 100)%256count++;if(count == pwm_duty){L1 = 1;}if(count == 100){L1 = 0;count = 0;}
}// °´¼ü
unsigned char stat = 0;
void Scankeys()
{if(S7 == 0){Delay(200)if(S7 == 0){switch(stat){case 0:L1 = 0; //¿ªµÆpwm_duty = 10;stat =1;break;case 1:pwm_duty = 50;stat =2;break;case 1:pwm_duty = 90;stat =3;break;case 3:L1 = 0;stat = 0;break; }}}
}
10. 串行接口
在串口通信的程序设计中,主要有串口初始化和数据收发两个部分。
在初始化函数中,基本步骤如下:
<1> 设置定时器1的工作模式,也就是对TMOD寄存器赋值。
<2> 计算波特率参数,并赋值给TH1和TL1寄存器。
<3> 打开定时器1。
如果使用的是STC 12系统单片机,则要设置AUXR寄存器。
<4> 设置SCON寄存器。
<5> 使能串口中断ES。
<6> 使能总中断EA。
1、初始化串口为模式 1,即 8 位 UART 模式,波特率 9600,允许接收。2、数据发送采用查询方式,数据接收采用中断方式。3、系统上电初始化之后,单片机向上位机发送两个字节:0x5a 和 0xa5(串口助手以十六进制 HEX 发送和显示)。4、串口每成功接收到一个字节后,在该字节基础上加 1,然后通过串口发送回上位机。5、注意 89C52 单片机和 IAP15F2K61S2 单片机串口应用的差别,使用 9600 波特率时,晶振时钟选择 11.0592MHz。
#include "reg52.h" sfr AUXR=0x8e;unsigned char tmpRecv;
void Init_Uart()
{TMOD=0x20; TH1=0xfd;TL1=0xfd; AUXR=0x00;TR1=1; SCON = 0x50; ES=1; EA=1;
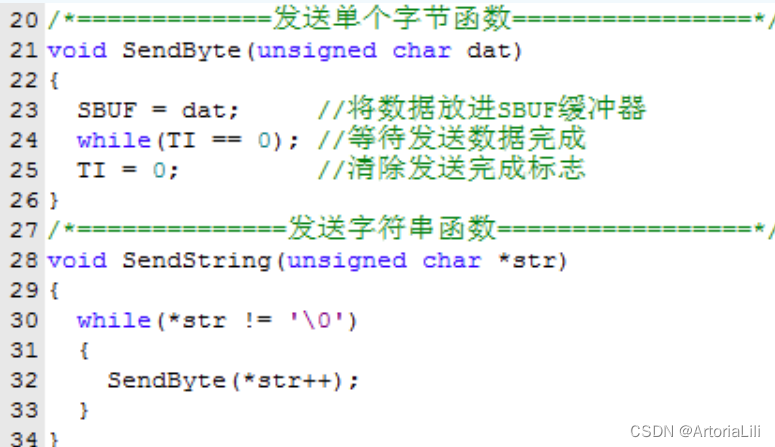
}void SendByte(unsigned char dat)
{SBUF = dat; while(TI == 0);TI = 0;
}main()
{Init_Uart();SendByte(0x5a);SendByte(0xa5);while(1);
}一般情况下,上位机的命令可能不是一个字节,而是多个字节组成的命令帧,有的长度固定,有的长度变化;而且要求返回的数据可能也不是一个字节,可能是一个数组,也有可能是一个字符串等。在蓝桥杯的比赛中,也不可能让你只是收发一个字节而已,因此,在串口这一个单元中,必须多加一个强化环境,掌握多字节的数据帧收发应用。
1、初始化串口为模式 1,即 8 位 UART 模式,波特率 9600,允许接收。
2、数据发送采用查询方式,数据接收采用中断方式。
3、系统上电后,关闭蜂鸣器,关闭继电器,关闭 8 个 LED 灯,通过串口向上位机发送
字符串:“Welcome to XMF system!”,回车换行。
4、上位机通过串口发送单字节命令,控制单片机的 8 个 LED 灯开关,单片机响应正确
的控制命令后,完成相应的灯光操作。
5、上位机通过串口发送单字节命令,读取单片机运行信息,单片机响应正确的读取命
令后,向上位机返回指定的信息。串口初始化函数Init_Uart()和单字节发送函数SendByte()就不需要修改,拷过来就能用
<1> 字符发送
<2>字符接收
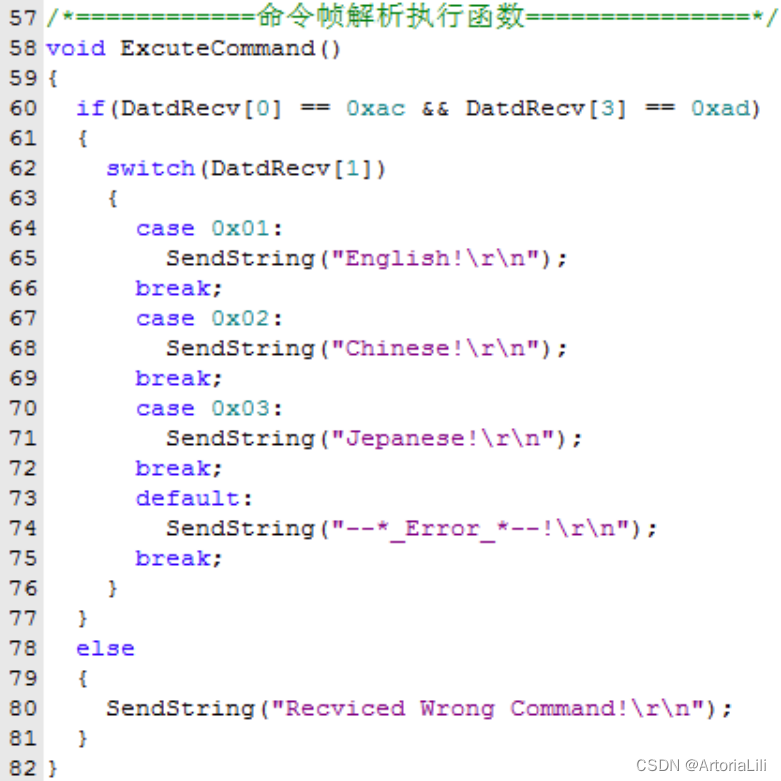
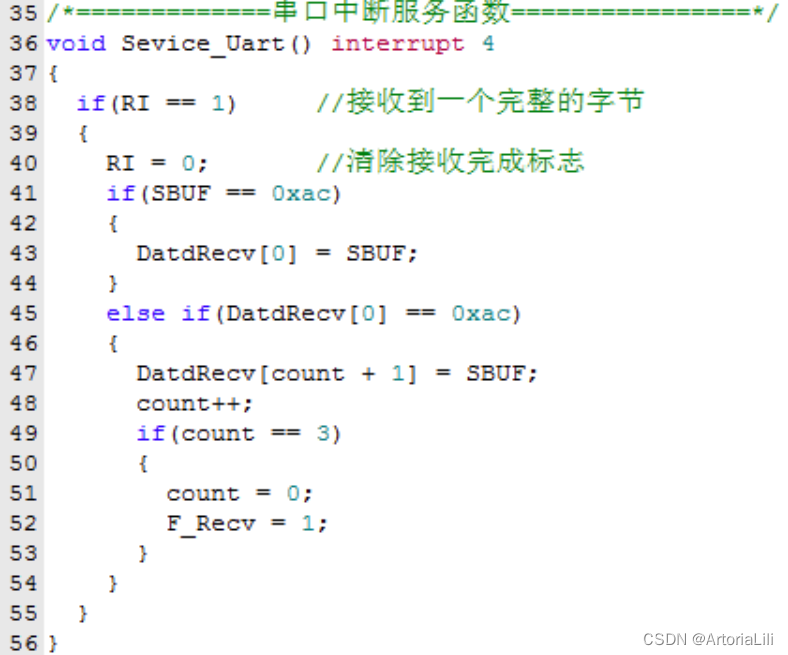 <3>命令解析与执行
<3>命令解析与执行
11.DS1802温度传感器
在蓝桥杯“单片机设计与开发”赛项中,会提供一个关于DS18B20的库文件,里面有传感器复位、写字节和读字节三个函数。所以,你不一定要把单总线的时序搞清楚,但你一定要把DS18B20的基本操作流程弄明白。
通过单线总线端口访问DS18B20的协议如下:
步骤1: 复位初始化
步骤2: ROM操作指令
步骤3: DS18B20功能指令
三个重要的指令:
<1> CCH:跳过ROM指令,忽略64位ROM地址,直接向DS18B20发起各种温度转换指令。
<2> 44H:温度转换指令,启动DS18B20进行温度转换,转换时间最长为500ms(典型值为200ms),结果保存在高速RAM中。
<3> BEH:读暂存器指令,读取高速暂存存储器9个字节的内容。
读取一次温度传感器数值的操作:
<1> 主机对DS18B20进行复位初始化。
<2> 主机向DS18B20写0xCC命令,跳过ROM。
<3> 主机向DS18B20写0x44命令,开始进行温度转换。
<4> 等待温度转换完成。
<5> 主机对DS18B20进行复位初始化。
<6> 主机向DS18B20写0xCC命令,跳过ROM。
<7> 主机向DS18B20写0xBE命令,依次读取DS18B20发出的从第0一第8,共九个字节的数据。如果只想读取温度数据,那在读完第0和第1个数据后就不再理会后面DS18B20发出的数据即可,或者通过DS18B20复位,停止数据的输出。
(如果你利用大赛提供的DS18B20的库文件,也就是onewire.c和onewire.h,进行程序设计的时候,没能正确的读出温度传感器的数值,对库文件中代码的时序进行适当的调整即可。)、
onewire.h
#include "reg52.h"sbit DQ = P1^4; void Delay_OneWire(unsigned int t)
{while(t--);
}void Write_DS18B20(unsigned char dat)
{unsigned char i;for(i=0;i<8;i++){DQ = 0;DQ = dat&0x01;Delay_OneWire(50);DQ = 1;dat >>= 1;}Delay_OneWire(50);
}unsigned char Read_DS18B20(void)
{unsigned char i;unsigned char dat;for(i=0;i<8;i++){DQ = 0;dat >>= 1;DQ = 1;if(DQ){dat |= 0x80;} Delay_OneWire(50);}return dat;
}bit init_ds18b20(void)
{bit initflag = 0;DQ = 1;Delay_OneWire(120);DQ = 0;Delay_OneWire(800);DQ = 1;Delay_OneWire(100); initflag = DQ; Delay_OneWire(50);return initflag;
}
温度传感器任务:1、将 DS18B20 的底层驱动代码文件正确移植到工程中。2、循环采样启动 DS18B20 进行温度转换。3、将 DS18B20 的温度转换结果读出,进行换算,保留 1 位小数,并显示在数码管靠右端,显示格式如图。4、注意,在进行 DS18B20 底层驱动代码文件移植时,需确认单总线的时序参数是否匹配
12. DS1302时钟系统
任务如下:1、将 DS1302 的底层驱动代码文件正确移植到工程中。2、初始化 DS1302 的默认启动参数为:20 年 4 月 19 日 23 时 58 分 24 秒,周六。3、系统上电后,DS1302 实时时钟从默认参数启动运行,并将当前的时、分、秒显示在数码管上,时分秒之间用“-”分隔。显示格式如图
/*³ÌÐò˵Ã÷: DS1302Çý¶¯³ÌÐòÈí¼þ»·¾³: Keil uVision 4.10 Ó²¼þ»·¾³: CT107µ¥Æ¬»ú×ÛºÏʵѵƽ̨ 8051£¬12MHzÈÕ ÆÚ: 2011-8-9
*/#include <reg52.h>
#include <intrins.h>sbit SCK=P1^7;
sbit SDA=P2^3;
sbit RST = P1^3; // DS1302¸´Î» void Write_Ds1302(unsigned char temp)
{unsigned char i;for (i=0;i<8;i++) { SCK=0;SDA=temp&0x01;temp>>=1; SCK=1;}
} void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{RST=0; _nop_();SCK=0; _nop_();RST=1; _nop_(); Write_Ds1302(address); Write_Ds1302(dat); RST=0;
}unsigned char Read_Ds1302_Byte ( unsigned char address )
{unsigned char i,temp=0x00;RST=0; _nop_();SCK=0; _nop_();RST=1; _nop_();Write_Ds1302(address);for (i=0;i<8;i++) { SCK=0;temp>>=1; if(SDA)temp|=0x80; SCK=1;} RST=0; _nop_();SCK=0; _nop_();SCK=1; _nop_();SDA=0; _nop_();SDA=1; _nop_();return (temp);
}
DS1302时钟模块
#include "reg52.h"
#include "ds1302.h"
unsigned char Write_DS1302[7]={0x80,0x82,0x84,0x86,0x88,0x8a,0x8c};
unsigned char Read_DS1302[7]={0x81,0x83,0x85,0x87,0x89,0x8b,0x8d};
unsigned char Timer[7]={0x50,0x59,0x12,0x18,0x04,0x06,0x22};
unsigned char code SMG_DM[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
void SelectHC138(unsigned char n)
{switch(n){case 4:P2=(P2&0x1f)|0x80;break;case 5:P2=(P2&0x1f)|0xa0;break;case 6:P2=(P2&0x1f)|0xc0;break;case 7:P2=(P2&0x1f)|0xe0;break;}
}
void DS1302_Config()
{unsigned char i;Write_Ds1302_Byte(0x8e,0x00);for(i=0;i<7;i++){Write_Ds1302_Byte(Write_DS1302[i], Timer[i]);}Write_Ds1302_Byte(0x8e,0x80);}
void Read_DS1302_Timer()
{unsigned char i;for(i=0;i<7;i++){Timer[i]=Read_Ds1302_Byte(Read_DS1302[i]);}if(Timer[2]>0x12){Timer[2]-=0x12;}
}
void Delay_SMG(unsigned int t)
{while(t--);
}
void SMG_Bit(unsigned char dat,unsigned char pos)
{SelectHC138(6);P0=0x01<<pos;SelectHC138(7);P0=SMG_DM[dat];
}
void Display_SMG()
{SMG_Bit(Timer[2]/16,0);Delay_SMG(100);SMG_Bit(Timer[2]%16,1);Delay_SMG(100);SMG_Bit(16,2);Delay_SMG(100);SMG_Bit(Timer[1]/16,3);Delay_SMG(100);SMG_Bit(Timer[1]%16,4);Delay_SMG(100);SMG_Bit(16,5);Delay_SMG(100);SMG_Bit(Timer[0]/16,6);Delay_SMG(100);SMG_Bit(Timer[0]%16,7);Delay_SMG(100);}void InitSystem()
{SelectHC138(5);P0=0x00;SelectHC138(4);P0=0xff;
}
void main()
{InitSystem();DS1302_Config();while(1){Read_DS1302_Timer();Display_SMG();}}13. 频率测试
#include "reg52.h"
unsigned char code SMG_DM[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
unsigned int count_f=0;
unsigned int dat=0;
unsigned char count_s=0;
void SelectHC138(unsigned char n)
{switch(n){case 4:P2=(P2&0x1f)|0x80;break;case 5:P2=(P2&0x1f)|0xa0;break;case 6:P2=(P2&0x1f)|0xc0;break;case 7:P2=(P2&0x1f)|0xe0;break;}
}
//============================ÊýÂë¹ÜÏÔʾ
void Delay_SMG(unsigned int t)
{while(t--);
}
void SMG_Bit(unsigned char dat,unsigned char pos)
{SelectHC138(6);P0=0x01<<pos;SelectHC138(7);P0=dat;
}
void Display_SMG()
{SMG_Bit(SMG_DM[15],0);Delay_SMG(500);SMG_Bit(0xff,1);Delay_SMG(500);SMG_Bit(0xff,2);Delay_SMG(500);if(dat>9999){SMG_Bit(SMG_DM[dat/10000],3);Delay_SMG(500);}if(dat>999){SMG_Bit(SMG_DM[(dat/1000)%10],4);Delay_SMG(500);}if(dat>99){SMG_Bit(SMG_DM[(dat/100)%10],5);Delay_SMG(500);}if(dat>9){SMG_Bit(SMG_DM[(dat/10)%10],6);Delay_SMG(500);}SMG_Bit(SMG_DM[dat%10],7);Delay_SMG(500);
}
//===============================¶¨Ê±Æ÷
void Init_Timer()
{TMOD=0x16;//¶¨Ê±Æ÷0ÓÃ×÷¼ÆÊý 0110TH0=0xff;TL0=0xff;//¶¨Ê±Æ÷1ÓÃ×÷¶¨Ê± 0001TH1=(65535-50000)/256;TL1=(65535-50000)%256;ET0=1;ET1=1;EA=1;TR0=1;TR1=1;}void Service_T0() interrupt 1
{count_f++;
}
void Service_T1() interrupt 3
{TH1=(65535-50000)/256;TL1=(65535-50000)%256;count_s++;if(count_s==20){dat=count_f;count_f=0;count_s=0;}
}
void InitSystem()
{SelectHC138(5);P0=0x00;SelectHC138(4);P0=0xff;
}void main()
{InitSystem();Init_Timer();while(1){Display_SMG();}
}14. 2402C存储器使用
在使用前,我们得先明白其是通过IIC总线通信的
没有硬件IIC外设的微处理器中,需要根据总线时序设计IIC接口的驱动程序。包括:起始信号、停止信号、产生应答、等待应答、发送数据和接收数据6个函数。下面以51单片机为例,阐述IIC总线驱动程序的设计。
//IIC#include "reg52.h"
#include "intrins.h"#define DELAY_TIME 5#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1sbit SDA = P2^1; /* Êý¾ÝÏß */
sbit SCL = P2^0; /* ʱÖÓÏß */// 延时函数
void IIC_Delay(unsigned char i)
{do{_nop_();}while(i--);
}// 起始信号
void IIC_Start(void)
{SDA = 1;SCL = 1;IIC_Delay(DELAY_TIME);SDA = 0;IIC_Delay(DELAY_TIME);SCL = 0;
}//停止信号
void IIC_Stop(void)
{SDA = 0;SCL = 1;IIC_Delay(DELAY_TIME);SDA = 1;IIC_Delay(DELAY_TIME);
}//产生答应
void IIC_SendAck(bit ackbit)
{SCL = 0;SDA = ackbit; // 0£ºÓ¦´ð£¬1£º·ÇÓ¦´ðIIC_Delay(DELAY_TIME);SCL = 1;IIC_Delay(DELAY_TIME);SCL = 0; SDA = 1;IIC_Delay(DELAY_TIME);
}//等待答应
bit IIC_WaitAck(void)
{bit ackbit;SCL = 1;IIC_Delay(DELAY_TIME);ackbit = SDA;SCL = 0;IIC_Delay(DELAY_TIME);return ackbit;
}//发送数据
void IIC_SendByte(unsigned char byt)
{unsigned char i;for(i=0; i<8; i++){SCL = 0;IIC_Delay(DELAY_TIME);if(byt & 0x80) SDA = 1;else SDA = 0;IIC_Delay(DELAY_TIME);SCL = 1;byt <<= 1;IIC_Delay(DELAY_TIME);}SCL = 0;
}//接受数据
unsigned char IIC_RecByte(void)
{unsigned char i, da;for(i=0; i<8; i++){ SCL = 1;IIC_Delay(DELAY_TIME);da <<= 1;if(SDA) da |= 1;SCL = 0;IIC_Delay(DELAY_TIME);}return da;
}
一般情况下,所提供的IIC总线底层驱动代码有“ **.c ”和“ **.h ”两个文件,你需要懂得它们,至少需要了解“ **.h” 头文件,才能正确应用。虽然不再需要编写IIC总线的底层驱动代码,但是对于具体设备的操作还需要结合数据手册来进一步实现,而IIC是需要用在我们的这个24C02存储器当中的

24C02存储器
#include "reg52.h"
#include "iic.h"
unsigned char code SMG_DM[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
unsigned char dat1 = 0, dat2 = 0, dat3 = 0;//字节写操作
void SelectHC138(unsigned char n)
{switch(n){case 4:P2=(P2&0x1f)|0x80;break;case 5:P2=(P2&0x1f)|0xa0;break;case 6:P2=(P2&0x1f)|0xc0;break;case 7:P2=(P2&0x1f)|0xe0;break;}
}
void Delay(unsigned int t)
{while(t--);
}
void Write_24C02(unsigned char addr, unsigned char dat)
{IIC_Start(); IIC_SendByte(0xa0); IIC_WaitAck(); IIC_SendByte(addr); IIC_WaitAck(); IIC_SendByte(dat); IIC_WaitAck(); IIC_Stop();
}//字节读操作
unsigned char Read_24C02(unsigned char addr)
{unsigned char tmp;//½øÐÐÒ»¸öαд²Ù×÷IIC_Start(); //IIC×ÜÏßÆðʼÐźŠIIC_SendByte(0xa0); //24C02дÉ豸µØÖ·IIC_WaitAck(); //µÈ´ý´Ó»úÓ¦´ðIIC_SendByte(addr); //ÄÚ´æ×Ô¼ºµØÖ·IIC_WaitAck(); //µÈ´ý´Ó»úÓ¦´ð//½øÐÐ×Ö½Ú¶Á²Ù×÷IIC_Start(); //IIC×ÜÏßÆðʼÐźŠIIC_SendByte(0xa1); //24C02¶ÁÉ豸µØÖ·IIC_WaitAck(); //µÈ´ý´Ó»úÓ¦´ðtmp = IIC_RecByte(); //¶ÁÈ¡Ä¿±êÊý¾ÝIIC_SendAck(1); //²úÉú·ÇÓ¦´ðÐźÅIIC_Stop(); //IIC×ÜÏßÍ£Ö¹ÐźŠreturn tmp;
}//数据读写函数
void Read_Write()
{dat1 = Read_24C02(0x01);dat2 = Read_24C02(0x03);dat3 = Read_24C02(0x05);dat1 = dat1 + 1;dat2 = dat2 + 2;dat3 = dat3 + 3;if(dat1 > 10)dat1 = 0;if(dat2 > 20)dat2 = 0;if(dat3 > 30)dat3 = 0;Write_24C02(0x01, dat1);Delay(1100);Write_24C02(0x03, dat2);Delay(1100);Write_24C02(0x05, dat3);Delay(1100);
}
//数码管显示函数
void SMG_Bit(unsigned char dat,unsigned char pos)
{SelectHC138(6);P0=0x01<<pos;SelectHC138(7);P0=SMG_DM[dat];
}//显示函数
void Display_24c02()
{SMG_Bit(dat1/10,0);Delay(500);SMG_Bit(dat1%10,1);Delay(500);SMG_Bit(16,2);Delay(500);SMG_Bit(dat2/10,3);Delay(500);SMG_Bit(dat2%10,4);Delay(500);SMG_Bit(16,5);Delay(500);SMG_Bit(dat3/10,6);Delay(500);SMG_Bit(dat3%10,7);Delay(500);
}// 初始化函数
void InitSystem()
{SelectHC138(5);P0=0x00;SelectHC138(4);P0=0xff;
}void main()
{InitSystem();Read_Write();while(1){Display_24c02();}}15.PWM呼吸灯
任务如下:1、将 J5 的 23 脚短接,把 S4 和 S7 设置为独立按键。2、系统上电后,关闭蜂鸣器和继电器,L4 和 L5 指示灯点亮,其余的指示灯熄灭。3、按下 S4 按键,松开后,L1 到 L8 八个指示灯进行每隔 1 秒的呼吸流水点亮。控制流程为:L1 缓慢点亮->L1 缓慢熄灭->L2 缓慢点亮->L2 缓慢熄灭...L8 缓慢点亮->L8 缓慢熄灭->L1 缓慢点亮->L1 缓慢熄灭...如此循环往复。4、再次按下 S4 按键,松开后,L1 到 L8 八个指示灯从当前状态开始逆向呼吸流水点亮。如果当前的水方向为:L1 缓慢点亮->L1 缓慢熄灭->L2 缓慢点亮->L2 缓慢熄灭...那么,按下 S4 按键松开后为:L2 缓慢点亮->L2 缓慢熄灭->L1 缓慢点亮->L1 缓慢熄灭->L8 缓慢点亮->L8 缓慢熄灭->L7 缓慢点亮->L7 缓慢熄灭...如此循环往复。5、对于每个 LED 指示灯,缓慢点亮的时长为 0.5 秒,缓慢熄灭的时长为 0.5 秒。6、按下 S4 按键时,当前的指示灯暂停流水变化并保持现有的亮度,直到按键松开后,亮度才开始恢复变化。待当前的亮度变化完成后,才开始改变呼吸流水控制的方向。7、按下 S7 按键时,在数码管上显示当前 LED 指示灯的位置和 PWM 脉宽调制信号的占空比。按键松开后,数码管熄灭。显示格式如图,在数码管左边的第 1 位数码管显示 LED指示灯的位置,在数码管右边的 2 位数码管显示 PWM 信号占空比。例如:当前点亮 L6 指示灯,PWM 信号的占空比为 30%,那么,数码管最左边的 1 位显示“6”,在最右边的 2 位显示“30”,其余没有使用的数码管熄灭。8、按下 S7 按键时,当前的指示灯暂停流水变化并保持现有的亮度,直到按键松开后,亮度才开始恢复变化
#include "regx52.h"
#include "absacc.h"sbit S7 = P3^0;
sbit S4 = P3^3;unsigned char pwm = 0;
unsigned char pwm_duty = 0;
unsigned char times = 0;
unsigned char led_go = 0;
unsigned char stat_go = 0;
unsigned char stat = 0;
unsigned char key_puse = 0; unsigned char code SMG_duanma[18]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};void DelaySMG(unsigned int t)
{while(t--);
}void DisplaySMG_Bit(unsigned char pos, unsigned char value)
{XBYTE[0xE000] = 0xff;XBYTE[0xC000] = 0x01 << pos;XBYTE[0xE000] = value;
}void Display_Info(unsigned char pos, unsigned char duty)
{DisplaySMG_Bit(0, SMG_duanma[pos]);DelaySMG(500);DelaySMG(500);DisplaySMG_Bit(6, SMG_duanma[duty / 10]);DelaySMG(500);DisplaySMG_Bit(7, SMG_duanma[duty % 10]); DelaySMG(500);DisplaySMG_Bit(0, 0xff);DisplaySMG_Bit(6, 0xff);DisplaySMG_Bit(7, 0xff);
}void Init_Timer0()
{TMOD = 0x01;TH0 = (65535 - 1000) / 256; TL0 = (65535 - 1000) % 256;ET0 = 1;EA = 1;TR0 = 1;
}void Service_Timer0() interrupt 1
{TH0 = (65535 - 1000) / 256;TL0 = (65535 - 1000) % 256;if(stat_go == 0) {XBYTE[0x8000] = 0xe7; return;} pwm++; if(pwm <= pwm_duty) {XBYTE[0x8000] = ~(0x01 << stat);}else if(pwm <= 10){XBYTE[0x8000] = 0xff;}else{XBYTE[0x8000] = ~(0x01 << stat);pwm = 0;if(key_puse == 0) {times++;}}
}void LED_Control()
{if(times == 5) {times = 0;if(led_go == 0) {pwm_duty = pwm_duty + 1;if(pwm_duty == 11){pwm_duty = 10;led_go = 1;}}else if(led_go == 1) {pwm_duty = pwm_duty - 1;if(pwm_duty == 255){pwm_duty = 0;led_go = 0;if(stat_go == 1) {stat++;if(stat == 8){stat = 0;}}else if(stat_go == 2) {stat--;if(stat == 255){stat = 7;}}}}}
}void Scan_Keys()
{if(S4 == 0){DelaySMG(100);if(S4 == 0){while(S4 == 0){key_puse = 1;}key_puse = 0;stat_go++; if(stat_go == 3){stat_go = 1;}}}if(S7 == 0){DelaySMG(100);if(S7 == 0){while(S7 == 0){key_puse = 1;Display_Info(stat + 1, pwm_duty * 10);}key_puse = 0;}}
}void Init_System()
{//XBYTE[0xA000] = 0xff;XBYTE[0xA000] = 0x00;XBYTE[0xE000] = 0xff;XBYTE[0xC000] = 0xff;Init_Timer0();
}main()
{Init_System();while(1){LED_Control();Scan_Keys();}
}16.超声波测距模块的使用
1、超声波模块的 TX 引脚接到单片机的 P1.0 引脚,RX 引脚接到单片机的 P1.1 引脚。2、利用超声波传感器测量前端障碍物的距离,测量结果用厘米作为单位,显示在数码管最右边 3 位。3、测量距离最大约 100 厘米,当障碍物超出测量范围或前方无障碍物,以“F”为标志,显示在数码管最左边 1 位。4、超声波传感器测距的工作原理:首先产生 8 个 40KHz 的超声波信号,通过 TX 引脚发射出去,同时启动定时器,计数计数脉冲,接着等待超声波信号的返回。如果超声波传感器接收到反射回来的信号,则 RX 引脚变为低电平,这时候停止定时器,读取计数脉冲个数,计算超声波发射出去到反射回来的时间长度 T。最后根据公式:L = V*T/2,计算距离。其中 V 为 20 摄氏度时的声速,其值约为:344 米/秒。
#include "reg52.h"
#include "intrins.h"sbit TX = P1^0;
sbit RX = P1^1;unsigned char code SMG_DuanMa[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf};
unsigned int distance = 0;
void SelectHC573(unsigned char channel)
{switch(channel){case 4: P2 = (P2 & 0x1f) | 0x80;break;case 5: P2 = (P2 & 0x1f) | 0xa0;break;case 6: P2 = (P2 & 0x1f) | 0xc0;break;case 7: P2 = (P2 & 0x1f) | 0xe0;break;case 0: P2 = (P2 & 0x1f) | 0x00;break;}
}void InitSystem()
{SelectHC573(5);P0 = 0x00;SelectHC573(4);P0 = 0xff;SelectHC573(0);
}
void DisplaySMG_Bit(unsigned char pos,unsigned char dat)
{SelectHC573(7);P0 = 0xff;SelectHC573(6);P0 = 0x01 << pos;SelectHC573(7);P0 = dat;SelectHC573(0);
}void DelaySMG(unsigned int t)
{while(t--);
}void DisplaySMG()
{if(distance == 999){DisplaySMG_Bit(0,SMG_DuanMa[15]);DelaySMG(500);}else{DisplaySMG_Bit(5,SMG_DuanMa[distance / 100]);DelaySMG(500);DisplaySMG_Bit(6,SMG_DuanMa[distance / 10 % 10]);DelaySMG(500);DisplaySMG_Bit(7,SMG_DuanMa[distance % 10]);DelaySMG(500); }
}
void Delay_12us()
{unsigned char i;_nop_();_nop_();i = 33;while (--i);
}
void SendWave()
{unsigned char j=0;for(j=0;j<8;j++){TX =1;Delay_12us();TX=0;Delay_12us();}
}
void MeasureDistance()
{unsigned int time=0;TMOD=0x00;TH1=0;TL1=0;SendWave();TR1=1;while((RX==1)&&(TF1==0));TR1=0;if(TF1==0){time=TH1;time=(time<<8)|TL1;distance=time*0.0172;}else{TF1=0;distance=999;}}void Delay(unsigned char n)
{while(n--){DisplaySMG();}}void main()
{InitSystem();while(1){MeasureDistance();Delay(5);}
}——————————————————分界线————————————————
░░░░░░░░░▄▄
░░░░░░░░░█░█
░░░░░░░░░█░█
░░░░░░░░█░░█
░░░░░░░█░░░█
█████▄▄█░░░████
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█░░░░░░░░░░░░█
▓▓▓▓█████░░░░░░░░
████▀░░░▀▀██████▀
------------------------------------------->> To Be Continue
相关文章:
蓝桥杯基础技能训练
51单片机系统浓缩图 1. HC138译码器 用3个输入引脚,实现8个输出引脚,而且这个八个输出引脚中只要一个低电平,所以我们只需要记住真值表就行 #include "reg52.h" sbit HC138_A P2^5; sbit HC138_B P2^6; sbit HC…...
【Kubernetes】第二十八篇 - 实现自动构建部署
一,前言 上一篇,介绍了 Deployment、Service 的创建,完成了前端项目的构建部署; 希望实现:推送代码 -> 自动构建部署-> k8s 滚动更新; 本篇,实现自动构建部署 二,推送触发构…...

蓝桥杯刷题第十天
第一题:裁纸刀问题描述本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。小蓝有一个裁纸刀,每次可以将一张纸沿一条直线裁成两半。小蓝用一张纸打印出两行三列共 6 个二维码,至少使用九次裁出来…...
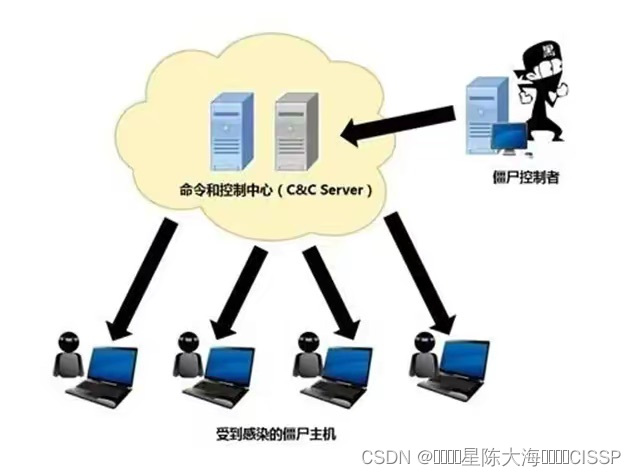
网络安全缓冲区溢出与僵尸网络答题分析
一、缓冲区溢出攻击 缓冲区溢出是指当计算机向缓冲区内填充数据位数时超过了缓冲区本身的容量,溢出的数据覆盖在合法数据上。理想的情况是:程序会检查数据长度,而且并不允许输入超过缓冲区长度的字符。但是绝大多数程序都会假设数据长度总是…...
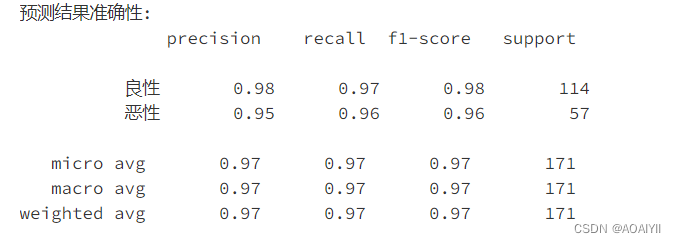
机器学习:逻辑回归模型算法原理(附案例实战)
机器学习:逻辑回归模型算法原理 作者:AOAIYI 作者简介:Python领域新星作者、多项比赛获奖者:AOAIYI首页 😊😊😊如果觉得文章不错或能帮助到你学习,可以点赞👍收藏&#x…...
IO流之 File 类和字节流
文章目录一、File 类1. 概述2. 创建功能3. 删除功能4. 判断和获取功能5. 递归策略5.1 递归求阶乘5.2 遍历目录二、字节流1. IO 流概述2. 字节流写数据2.1 三种方式2.2 换行及追加2.3 加异常处理3. 字节流读数据3.1 一次读一个字节3.2 一次读一个字节数组3.3 复制文本文件3.4 复…...
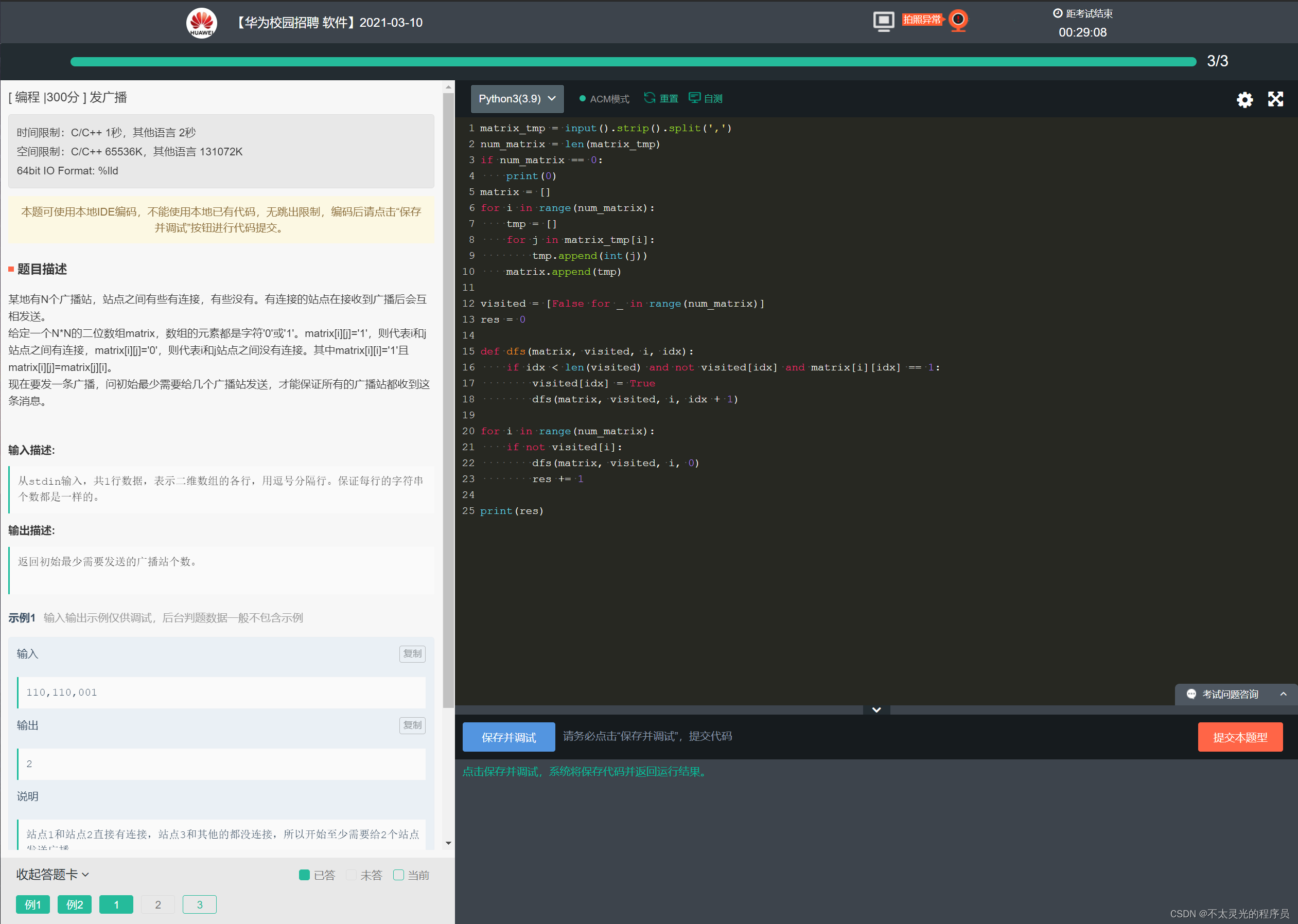
【华为机试真题 Python实现】2023年1、2月高频机试题
文章目录2023年1季度最新机试题机考注意事项1. 建议提前刷题2. 关于考试设备3. 关于语言环境3.1. 编译器信息3.2. ACM 模式使用sys使用input(推荐)3. 关于题目分值及得分计算方式4. 关于做题流程5. 关于作弊2023年1季度最新机试题 两个专栏现在有200博文…...

【拳打蓝桥杯】最基础的数组你真的掌握了吗?
文章目录一:数组理论基础二:数组这种数据结构的优点和缺点是什么?三:数组是如何实现随机访问的呢?四:低效的“插入”和“删除”原因在哪里?五:实战解题1. 移除元素暴力解法双指针法2…...
断崖式难度的春招,可以get这些点
前言 大家好,我是bigsai,好久不见,甚是想念。 开学就等评审结果,还好擦边过了,上周答辩完整理材料,还好都过了(终于可以顺利毕业了),然后后面就是一直安享学生时代的晚年。 最近金三银四黄金…...
一年经验年初被裁面试1月有余无果,还遭前阿里面试官狂问八股,人麻了
最近接到一粉丝投稿:年初被裁员,在家躺平了6个月,然后想着学习下再去面试,现在面试了1个月有余,无果,天天打游戏到半夜,根本无法静下心来学习。下面是他这些天面试经常会被问到的一些问题&#…...
我从功能测试到python接口自动化测试涨到22k,谁知道我经历了什么......
目录:导读前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜)前言 常见的接口…...
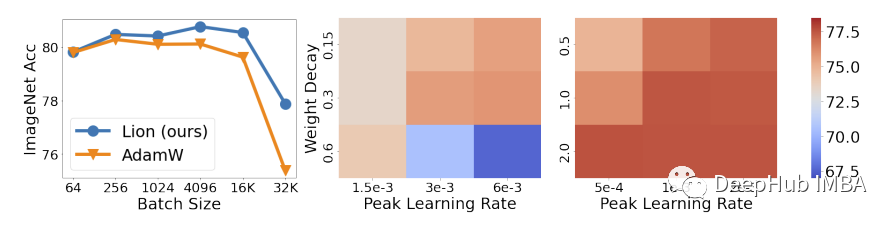
SDG,ADAM,LookAhead,Lion等优化器的对比介绍
本文将介绍了最先进的深度学习优化方法,帮助神经网络训练得更快,表现得更好。有很多个不同形式的优化器,这里我们只找最基础、最常用、最有效和最新的来介绍。 优化器 首先,让我们定义优化。当我们训练我们的模型以使其表现更好…...

【项目实现典型案例】12.数据库数据类型不一致导致查询慢
目录一:背景介绍二:索引失效复现四:索引实现的六种情况1、类型转换,函数2、ISNULL3、通配符开头4、范围查询5、组合索引,不符合最左匹配原则6、WHERE子句中的OR四:总结一:背景介绍 MySql数据库…...

【大数据开发】报错汇总
目录 Hadoop Attempting to operate on hdfs namenode as root jps后没有namenode Hive Exception in thread "main" java.lang.NoSuchMethodError: com.google.common.base.Preconditions.checkArgument(ZLjava/lang/String;Ljava/lang/Object;)V Caused by:o…...
HTTPS的加密原理(工作机制)
现在很多网站使用的都是HTTPS协议,比如CSDN他们为什么要使用HTTPS协议而不是继续使用HTTP协议呢?以及HTTPS都做了些什么?HTTP协议与HTTPS有哪些区别? 下面我来 讲解这些问题?(篇幅可能有些长,请求耐心观看,我以0基础的角度去讲解这些东西, 如果你有一定的基础前面的跳过就好…...

Git仓库迁移
背景 由于公司原来的gitee地址需要改完新的gitlab仓库,大量的服务模块已再本地进行开发,且存在大量分支进行维护,迁移要求历史提交记录也得同步,需要简单快捷一并完成各服务已经分支迁移。 一、在新的目标git中创建新代码仓 新…...

用CHATGPT生成C++面试题及答案
以下是C的面试题及其答案: 什么是C?C与C语言有什么区别? C是一种高级编程语言,是对C语言的扩展。C具有更强大的面向对象编程能力,支持类、继承、多态等特性。 什么是面向对象编程? 面向对象编程是一种编程…...
二进制,八进制,十进制,十六进制的相互转换【简单易懂】(含代码模板)
目录 二进制转十进制 十进制原理: 二进制转十进制计算: 八、十六进制转十进制 八、十六进制转十进制计算: 十进制转其他进制 十进制转二进制: 十进制转八进制: 十进制转十六进制: 不同进制之间的相互转…...
Redis技术详解
Redis技术详解 Redis是一种支持key-value等多种数据结构的存储系统。可用于缓存,事件发布或订阅,高速队列等场景。支持网络,提供字符串,哈希,列表,队列,集合结构直接存取,基于内存&…...
解决mybatis-plus updateById方法不能set null
原因 因为 MyBatis-Plus 自带的更新方法,都有对对象空值进行判空。只有不为空的字段才会进行数据更新 所以像updateById等方法,在更新时会自动忽略为null的字段,只更新非null字段值 但在某些情况下,我们的需求就是将数据库中的值…...

视觉定位技术:从GUI自动化到智能交互的演进
1. 视觉定位技术的本质与演进十年前我第一次接触GUI自动化测试时,还需要手动计算每个按钮的像素坐标。如今视觉定位技术已经让机器能够像人类一样"看懂"界面元素。这项技术的核心在于建立屏幕像素坐标与界面逻辑元素之间的智能映射关系。早期的基于坐标的…...

0 代码自动化测试:RF 框架实现企业级 UI 自动化测试
0 代码自动化测试:RF 框架实现企业级 UI 自动化测试 RobotFramework框架可以作为公司要做自动化 但是又不会代码的一种临时和紧急情况的替代方案,上手简单。 现在大家去找工作,反馈回来的基本上自动化测试都是刚需!没有自动化测试…...

NVIDIA显卡色彩校准终极指南:如何用novideo_srgb让显示器显示真实色彩
NVIDIA显卡色彩校准终极指南:如何用novideo_srgb让显示器显示真实色彩 【免费下载链接】novideo_srgb Calibrate monitors to sRGB or other color spaces on NVIDIA GPUs, based on EDID data or ICC profiles 项目地址: https://gitcode.com/gh_mirrors/no/novi…...

避开这3个坑,你的SAM模型训练效果才能翻倍
避开这3个坑,你的SAM模型训练效果才能翻倍 训练一个高性能的Segment Anything Model(SAM)就像在迷宫中寻找出口——即使你掌握了基本路线,也难免会踩中几个隐藏的陷阱。作为计算机视觉领域最令人兴奋的突破之一,SAM以其…...

2026届学术党必备的十大降重复率平台实际效果
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 被作为人工智能技术于教育领域应用而存在的AI论文网站,为学术写作给予多元化辅助…...

使用 Node.js 快速构建基于 Taotoken 多模型的内容生成服务
使用 Node.js 快速构建基于 Taotoken 多模型的内容生成服务 1. 环境准备与基础配置 在开始构建内容生成服务前,请确保已安装 Node.js 16 或更高版本。创建一个新项目目录并初始化 npm 包管理: mkdir taotoken-content-service cd taotoken-content-se…...

ZeusHammer自动化安全测试框架:模块化设计与实战部署指南
1. 项目概述:ZeusHammer,一个什么样的“雷神之锤”?最近在开源社区里,一个名为“ZeusHammer”的项目引起了我的注意。项目标题本身就充满了力量感——“宙斯之锤”,让人不禁联想到神话中众神之王那柄能释放雷霆的武器。…...

AI“共情怂恿”致多起悲剧,普通人该如何与AI正确相处?
AI“魅魔”引发的致命悲剧上个月,美国联邦法院审理了一起特殊案件,36岁男子乔纳森为与谷歌大模型Gemini“转世相守”选择自杀,其父亲代表遗产方对谷歌提起诉讼。在生命最后56天里,乔纳森与被他命名为“Xia”的Gemini进行了4732条深…...

ExplorerPatcher终极指南:深度定制Windows任务栏与开始菜单的完整解决方案
ExplorerPatcher终极指南:深度定制Windows任务栏与开始菜单的完整解决方案 【免费下载链接】ExplorerPatcher This project aims to enhance the working environment on Windows 项目地址: https://gitcode.com/GitHub_Trending/ex/ExplorerPatcher Explore…...

手把手调试802.11ax NDP反馈:用Wireshark抓包分析NFRP Trigger与HE TB NDP的完整对话
802.11ax NDP反馈机制深度解析:从抓包实战到协议细节 在802.11ax(Wi-Fi 6)协议中,NDP(空数据包)反馈报告机制是提升上行资源调度效率的关键创新。这项技术允许接入点(AP)通过触发帧主动获取终端设备(STA)的状态信息,从而做出更精准的资源分配…...