STM32-I2C硬件外设
本博文建议与我上一篇I2C 通信协议共同理解 合成一套关于I2C软硬件体系
STM32内部集成了硬件I2C收发电路,可以由硬件自动执行时钟生成、起始终止条件生成、应答位收发、数据收发等功能,减轻CPU的负担
特点:
- 多主机功能:该模块既可做主设备也可做从设备
- 支持7位 / 10位地址模式
- 支持不同的通讯速度,标准速度(高达100 kHz),快速(高达400 kHz)
- 根据特定设备的需要,可以使用DMA以减轻CPU的负担
- 可配置的PEC(信息包错误检测)的产生或校验:
- 兼容SMBus协议
STM32F103C8T6 硬件I2C资源:I2C1、I2C2
模式选择
- 从发送器模式
- 从接收器模式
- 主发送器模式
- 主接收器模式
基本结构
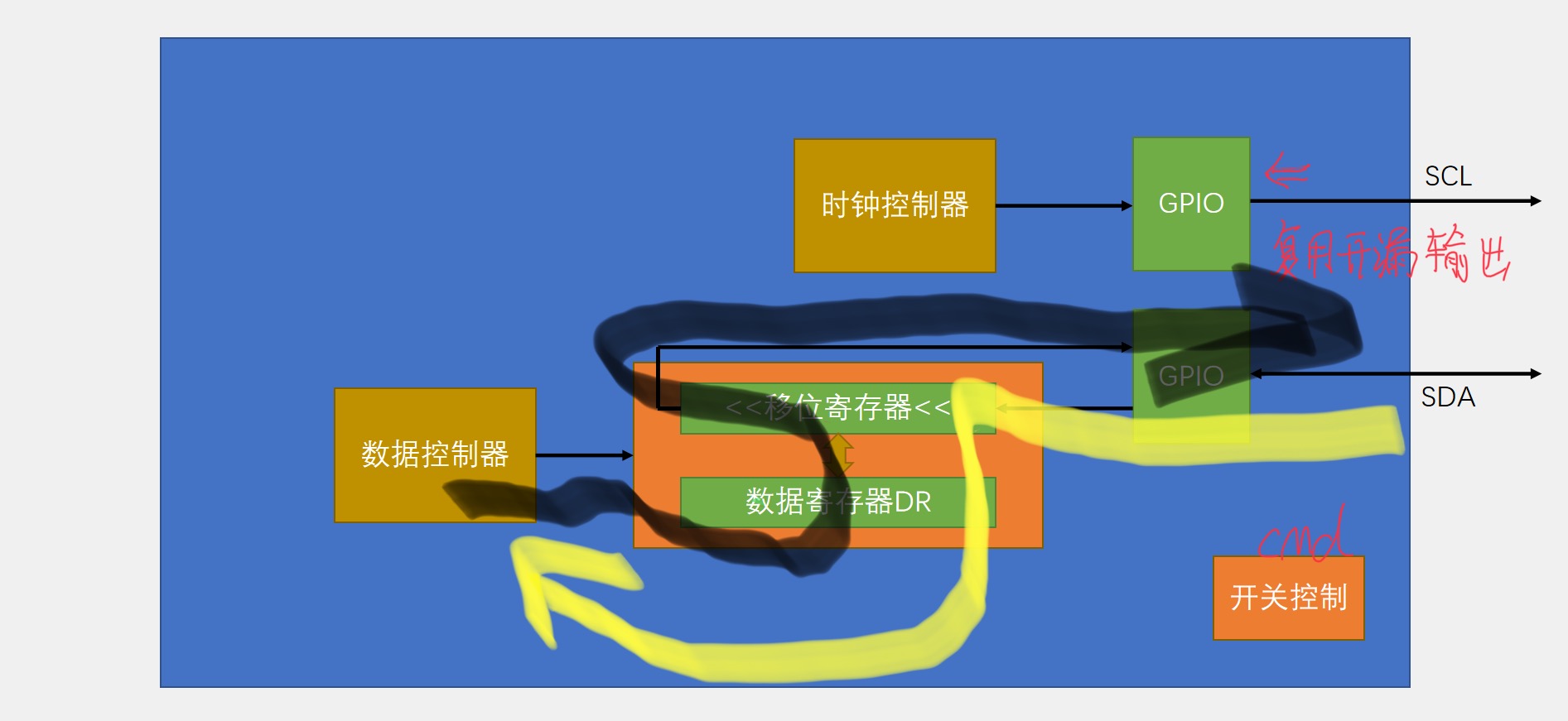
注意:
SDA线 可以输入输出 ,同样SCL线也可以输入输出,当I2C设备当从机时候,其他主机的SCL线输入控制该设备的SCL线
通信流程
主机发送
说明:S=Start(起始条件),Sr=重复的起始条件,P=Stop(停止条件),A=响应,NA=非响应,
 EVx=事件(ITEVFEN=1时产生中断)。
EVx=事件(ITEVFEN=1时产生中断)。
- EV5: 置SB=1, 读SR1然后将地址写入DR寄存器 将清除该事件。
- EV6: 置ADDR=1, 读SR1然后读SR2将清除该事件。
- EV8_1:置TxE=1, 移位寄存器空,数据寄存器空,写DR寄存器。
- EV8: 置TxE=1, 移位寄存器非空,数据寄存器空,写入DR寄存器将清除该事件。
- EV8_2:置TxE=1,BTF=1 请求设置停止位。TxE和BTF位由硬件在产生停止条件时清除。
- EV9: 置ADDR10=1, 读SR1然后写入DR寄存器将清除该事件。
主机接收
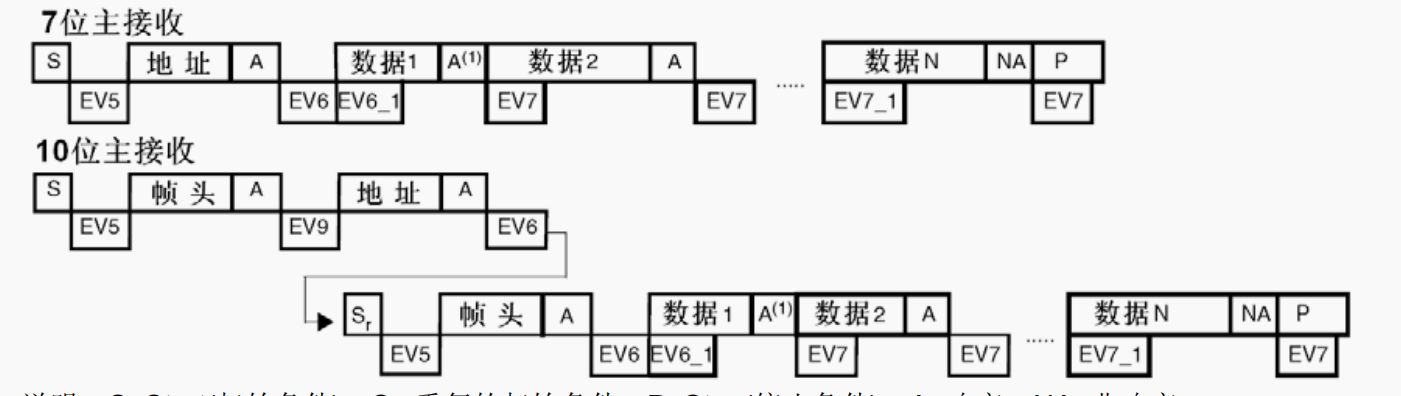
- EV5: 置SB=1, 读SR1然后将地址写入DR寄存器将清除该事件。
- EV6: 置ADDR=1, 读SR1然后读SR2将清除该事件。 在10位主接收模式下,该事件后应设置CR2的START=1。
- EV6_1: 没有对应的事件标志,只适于接收1个字节的情况。 恰好在EV6之后(即清除了ADDR之后),要清除响应和停止条件的产生位。
- EV7: 置RxNE=1, 读DR寄存器清除该事件。
- EV7_1: 置RxNE=1, 读DR寄存器清除该事件。设置ACK=0和STOP请求。
- EV9: 置ADDR10=1, 读SR1然后写入DR寄存器将清除该事件
初始化代码(利用MPU6050)
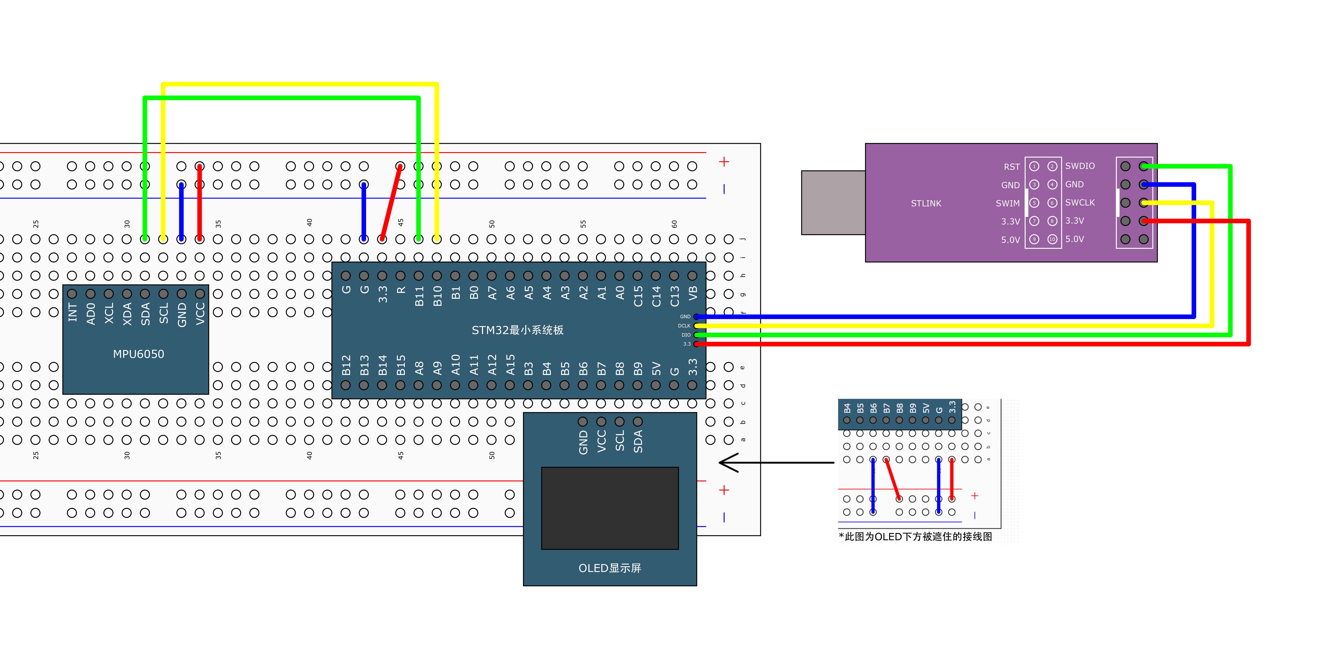
使用 I2C硬件模块 与 MPU6050 通信
I2C初始化
void MPU6050_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE); //开启I2C2的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB10和PB11引脚初始化为复用开漏输出/*I2C初始化*/I2C_InitTypeDef I2C_InitStructure; //定义结构体变量I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //模式,选择为I2C模式I2C_InitStructure.I2C_ClockSpeed = 50000; //时钟速度,选择为50KHzI2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; //时钟占空比,选择Tlow/Thigh = 2I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //应答,选择使能I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;//应答地址,选择7位,从机模式下才有效I2C_InitStructure.I2C_OwnAddress1 = 0x00; //自身地址,从机模式下才有效I2C_Init(I2C2, &I2C_InitStructure); //将结构体变量交给I2C_Init,配置I2C2/*I2C使能*/I2C_Cmd(I2C2, ENABLE); //使能I2C2,开始运行/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPFMPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/sMPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}写 入(Data即写入数据)
/*** 函 数:MPU6050写寄存器* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF* 返 回 值:无*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成起始条件MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //硬件I2C发送从机地址,方向为发送MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED); //等待EV6I2C_SendData(I2C2, RegAddress); //硬件I2C发送寄存器地址MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING); //等待EV8I2C_SendData(I2C2, Data); //硬件I2C发送数据MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //等待EV8_2I2C_GenerateSTOP(I2C2, ENABLE); //硬件I2C生成终止条件
}
读 出(返回值即读出数据)
/*** 函 数:MPU6050读寄存器* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述* 返 回 值:读取寄存器的数据,范围:0x00~0xFF*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{uint8_t Data;I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成起始条件MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);//硬件I2C发送从机地址,方向为发送MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//等待EV6I2C_SendData(I2C2, RegAddress); //硬件I2C发送寄存器地址MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //等待EV8_2I2C_GenerateSTART(I2C2, ENABLE); //硬件I2C生成重复起始条件MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //等待EV5I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver); //硬件I2C发送从机地址,方向为接收MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED); //等待EV6I2C_AcknowledgeConfig(I2C2, DISABLE); //在接收最后一个字节之前提前将应答失能I2C_GenerateSTOP(I2C2, ENABLE); //在接收最后一个字节之前提前申请停止条件MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED); //等待EV7Data = I2C_ReceiveData(I2C2); //接收数据寄存器I2C_AcknowledgeConfig(I2C2, ENABLE); //将应答恢复为使能,为了不影响后续可能产生的读取多字节操作return Data;
}
相关文章:
STM32-I2C硬件外设
本博文建议与我上一篇I2C 通信协议共同理解 合成一套关于I2C软硬件体系 STM32内部集成了硬件I2C收发电路,可以由硬件自动执行时钟生成、起始终止条件生成、应答位收发、数据收发等功能,减轻CPU的负担 特点: 多主机功能&#x…...

暑假第一次作业
第一步:给R1,R2,R3,R4配IP [R1-GigabitEthernet0/0/0]ip address 192.168.1.1 24 [R1-Serial4/0/0]ip address 15.0.0.1 24 [R2-GigabitEthernet0/0/0]ip address 192.168.2.1 24 [R2-Serial4/0/0]ip address 25.0.0.1 24 [R3-GigabitEthernet0/0/0]ip address 192.…...

【算法专题】快速排序
1. 颜色分类 75. 颜色分类 - 力扣(LeetCode) 依据题意,我们需要把只包含0、1、2的数组划分为三个部分,事实上,在我们前面学习过的【算法专题】双指针算法-CSDN博客中,有一道题叫做移动零,题目要…...

debian 12 PXE Server 批量部署系统
pxe server 前言 PXE(Preboot eXecution Environment,预启动执行环境)是一种网络启动协议,允许计算机通过网络启动而不是使用本地硬盘。PXE服务器是实现这一功能的服务器,它提供了启动镜像和引导加载程序,…...

【Pytorch】RNN for Image Classification
文章目录 1 RNN 的定义2 RNN 输入 input, h_03 RNN 输出 output, h_n4 多层5 小试牛刀 学习参考来自 pytorch中nn.RNN()总结RNN for Image Classification(RNN图片分类–MNIST数据集)pytorch使用-nn.RNNBuilding RNNs is Fun with PyTorch and Google Colab 1 RNN 的定义 nn.…...

基于Java的飞机大战游戏的设计与实现论文
点击下载源码 基于Java的飞机大战游戏的设计与实现 摘 要 现如今,随着智能手机的兴起与普及,加上4G(the 4th Generation mobile communication ,第四代移动通信技术)网络的深入,越来越多的IT行业开始向手机…...

初识影刀:EXCEL根据部门筛选低值易耗品
第一次知道这个办公自动化的软件还是在招聘网站上,了解之后发现对于办公中重复性的工作还是挺有帮助的,特别是那些操作非EXCEL的重复性工作,当然用在EXCEL上更加方便,有些操作比写VBA便捷。 下面就是一个了解基本操作后ÿ…...

nginx的四层负载均衡实战
目录 1 环境准备 1.1 mysql 部署 1.2 nginx 部署 1.3 关闭防火墙和selinux 2 nginx配置 2.1 修改nginx主配置文件 2.2 创建stream配置文件 2.3 重启nginx 3 测试四层代理是否轮循成功 3.1 远程链接通过代理服务器访问 3.2 动图演示 4 四层反向代理算法介绍 4.1 轮询࿰…...

中职网络安全B模块Cenots6.8数据库
任务环境说明: ✓ 服务器场景:CentOS6.8(开放链接) ✓ 用户名:root;密码:123456 进入虚拟机操作系统:CentOS 6.8,登陆数据库(用户名:root&#x…...

BGP笔记的基本概要
技术背景: 在只有IGP(诸如OSPF、IS-IS、RIP等协议,因为最初是被设计在一个单域中进行一个路由操纵,因此被统一称为Interior Gateway Protocol,内部网关协议)的时代,域间路由无法实现一个全局路由…...

【Redis】复制(Replica)
文章目录 一、复制是什么?二、 基本命令三、 配置(分为配置文件和命令配置)3.1 配置文件3.2 命令配置3.3 嵌套连接3.4 关闭从属关系 四、 复制原理五、 缺点 以下是本篇文章正文内容 一、复制是什么? 主从复制 masterÿ…...

封装了一个仿照抖音效果的iOS评论弹窗
需求背景 开发一个类似抖音评论弹窗交互效果的弹窗,支持滑动消失, 滑动查看评论 效果如下图 思路 创建一个视图,该视图上面放置一个tableView, 该视图上添加一个滑动手势,同时设置代理,实现代理方法 (BOOL)gestur…...

【JavaWeb程序设计】Servlet(二)
目录 一、改进上一篇博客Servlet(一)的第一题 1. 运行截图 2. 建表 3. 实体类 4. JSP页面 4.1 login.jsp 4.2 loginSuccess.jsp 4.3 loginFail.jsp 5. mybatis-config.xml 6. 工具类:创建SqlSessionFactory实例,进行 My…...

php探针
php探针是用来探测空间、服务器运行状况和PHP信息用的,探针可以实时查看服务器硬盘资源、内存占用、网卡流量、系统负载、服务器时间等信息。 下面就分享下我是怎样利用php探针来探测服务器网站空间速度、性能、安全功能等。 具体步骤如下: 1.从网上下…...

泰勒级数 (Taylor Series) 动画展示 包括源码
泰勒级数 (Taylor Series) 动画展示 包括源码 flyfish 泰勒级数(英语:Taylor series)用无限项连加式 - 级数来表示一个函数,这些相加的项由函数在某一点的导数求得。 定义了一个函数f(x)表示要近似的函数 sin ( x ) \sin(x) …...

蔚来汽车:拥抱TiDB,实现数据库性能与稳定性的飞跃
作者: Billdi表弟 原文来源: https://tidb.net/blog/449c3f5b 演讲嘉宾:吴记 蔚来汽车Tidb爱好者 整理编辑:黄漫绅(表妹)、李仲舒、吴记 本文来自 TiDB 社区合肥站走进蔚来汽车——来自吴记老师的演讲…...

【Django+Vue3 线上教育平台项目实战】构建高效线上教育平台之首页模块
文章目录 前言一、导航功能实现a.效果图:b.后端代码c.前端代码 二、轮播图功能实现a.效果图b.后端代码c.前端代码 三、标签栏功能实现a.效果图b.后端代码c.前端代码 四、侧边栏功能实现1.整体效果图2.侧边栏功能实现a.效果图b.后端代码c.前端代码 3.侧边栏展示分类及…...

对比 UUIDv1 和 UUIDv6
UUIDv6是UUIDv1的字段兼容版本,重新排序以改善数据库局部性。UUIDv6主要在使用UUIDv1的上下文中实现。不涉及遗留UUIDv1的系统应该改用UUIDv7。 与 UUIDv1 将时间戳分割成低、中、高三个部分不同,UUIDv6 改变了这一序列,使时间戳字节从最重要…...
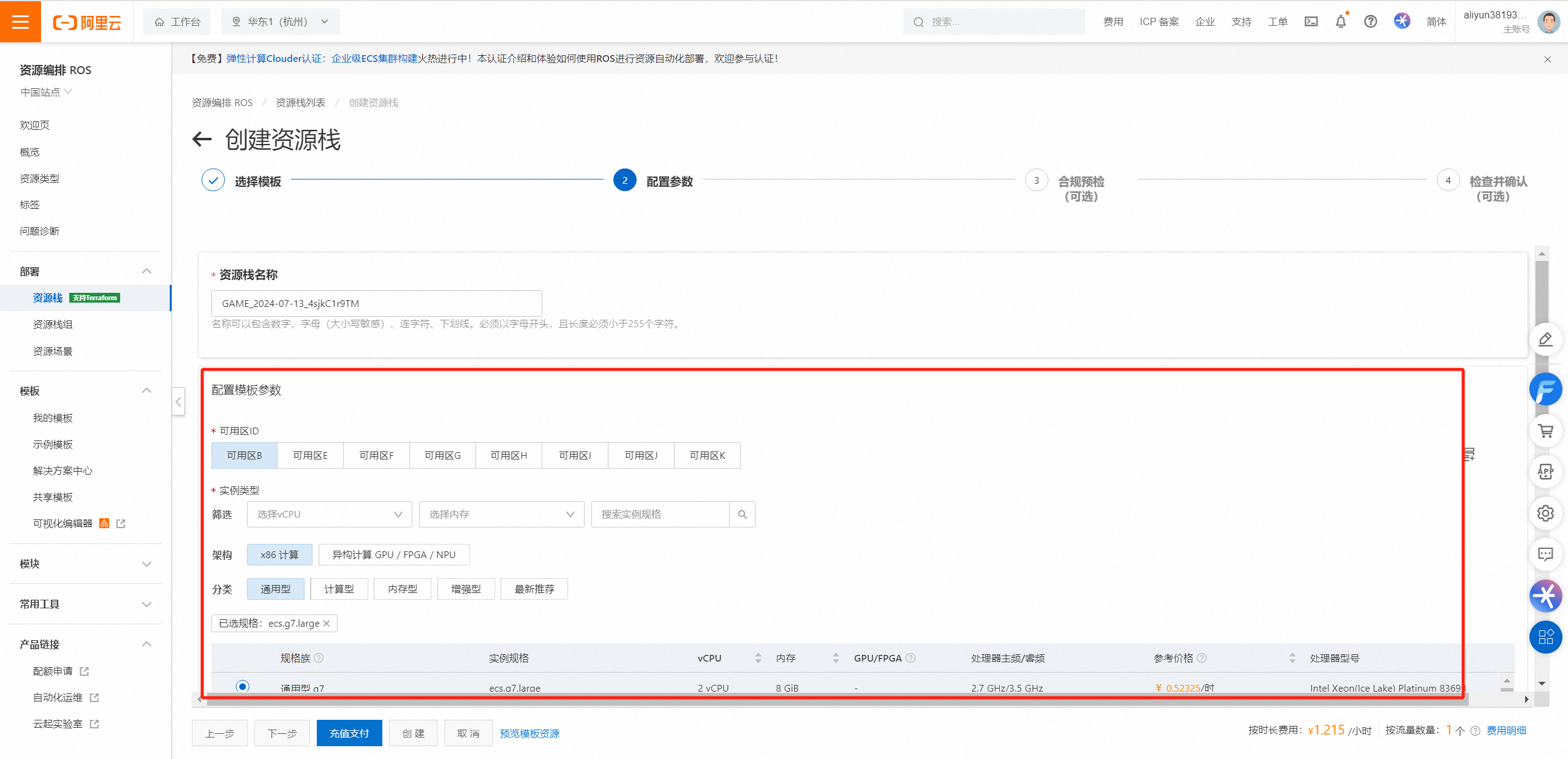
记一次饱经挫折的阿里云ROS部署经历
前言 最近在参加的几个项目测评里,我发现**“一键部署”这功能真心好用,省下了不少宝贵时间和力气,再加上看到阿里云现在有个开源上云**的活动。趁着这波热潮,今天就聊聊怎么从头开始,一步步搞定阿里云的资源编排服务…...

代码运行故障排除:PyCharm中的问题解决指南
代码运行故障排除:PyCharm中的问题解决指南 引言 PyCharm,作为一款流行的集成开发环境(IDE),提供了强大的工具来支持Python开发。然而,即使是最先进的IDE也可能遇到代码无法运行的问题。这些问题可能由多…...

C++_核心编程_多态案例二-制作饮品
#include <iostream> #include <string> using namespace std;/*制作饮品的大致流程为:煮水 - 冲泡 - 倒入杯中 - 加入辅料 利用多态技术实现本案例,提供抽象制作饮品基类,提供子类制作咖啡和茶叶*//*基类*/ class AbstractDr…...

【OSG学习笔记】Day 18: 碰撞检测与物理交互
物理引擎(Physics Engine) 物理引擎 是一种通过计算机模拟物理规律(如力学、碰撞、重力、流体动力学等)的软件工具或库。 它的核心目标是在虚拟环境中逼真地模拟物体的运动和交互,广泛应用于 游戏开发、动画制作、虚…...
shell脚本--常见案例
1、自动备份文件或目录 2、批量重命名文件 3、查找并删除指定名称的文件: 4、批量删除文件 5、查找并替换文件内容 6、批量创建文件 7、创建文件夹并移动文件 8、在文件夹中查找文件...
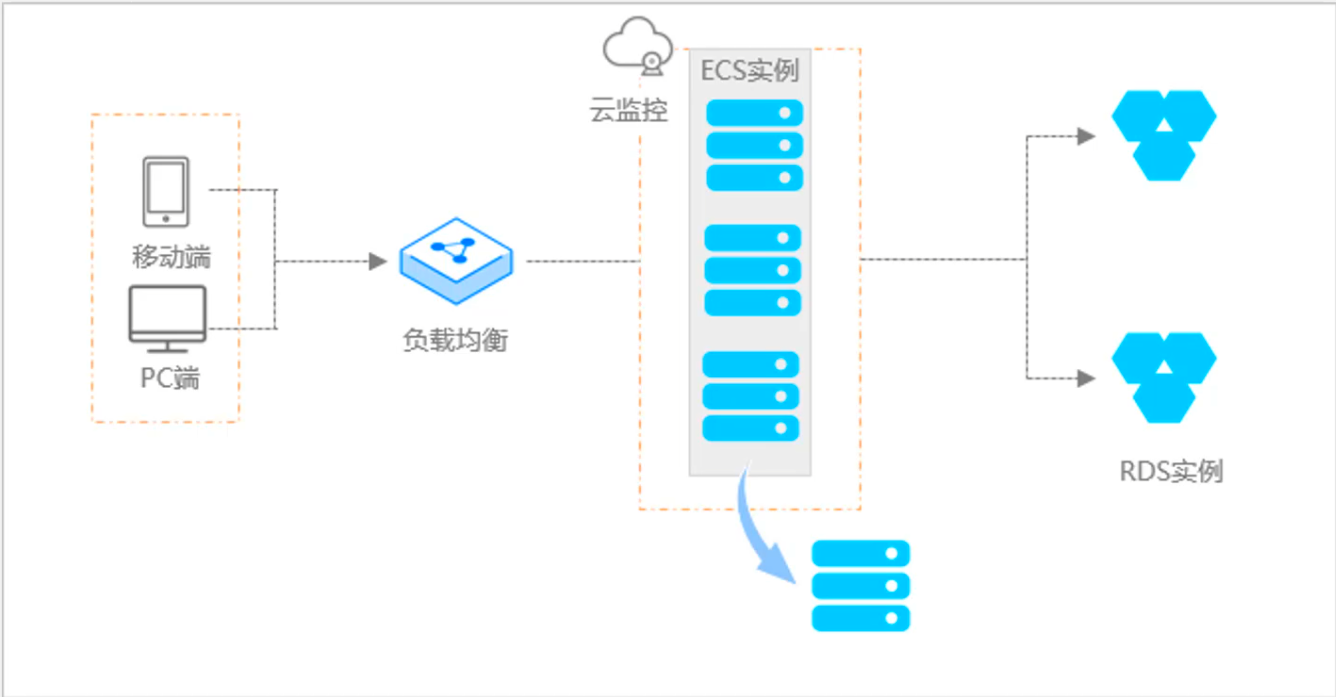
阿里云ACP云计算备考笔记 (5)——弹性伸缩
目录 第一章 概述 第二章 弹性伸缩简介 1、弹性伸缩 2、垂直伸缩 3、优势 4、应用场景 ① 无规律的业务量波动 ② 有规律的业务量波动 ③ 无明显业务量波动 ④ 混合型业务 ⑤ 消息通知 ⑥ 生命周期挂钩 ⑦ 自定义方式 ⑧ 滚的升级 5、使用限制 第三章 主要定义 …...

mongodb源码分析session执行handleRequest命令find过程
mongo/transport/service_state_machine.cpp已经分析startSession创建ASIOSession过程,并且验证connection是否超过限制ASIOSession和connection是循环接受客户端命令,把数据流转换成Message,状态转变流程是:State::Created 》 St…...

安宝特方案丨XRSOP人员作业标准化管理平台:AR智慧点检验收套件
在选煤厂、化工厂、钢铁厂等过程生产型企业,其生产设备的运行效率和非计划停机对工业制造效益有较大影响。 随着企业自动化和智能化建设的推进,需提前预防假检、错检、漏检,推动智慧生产运维系统数据的流动和现场赋能应用。同时,…...
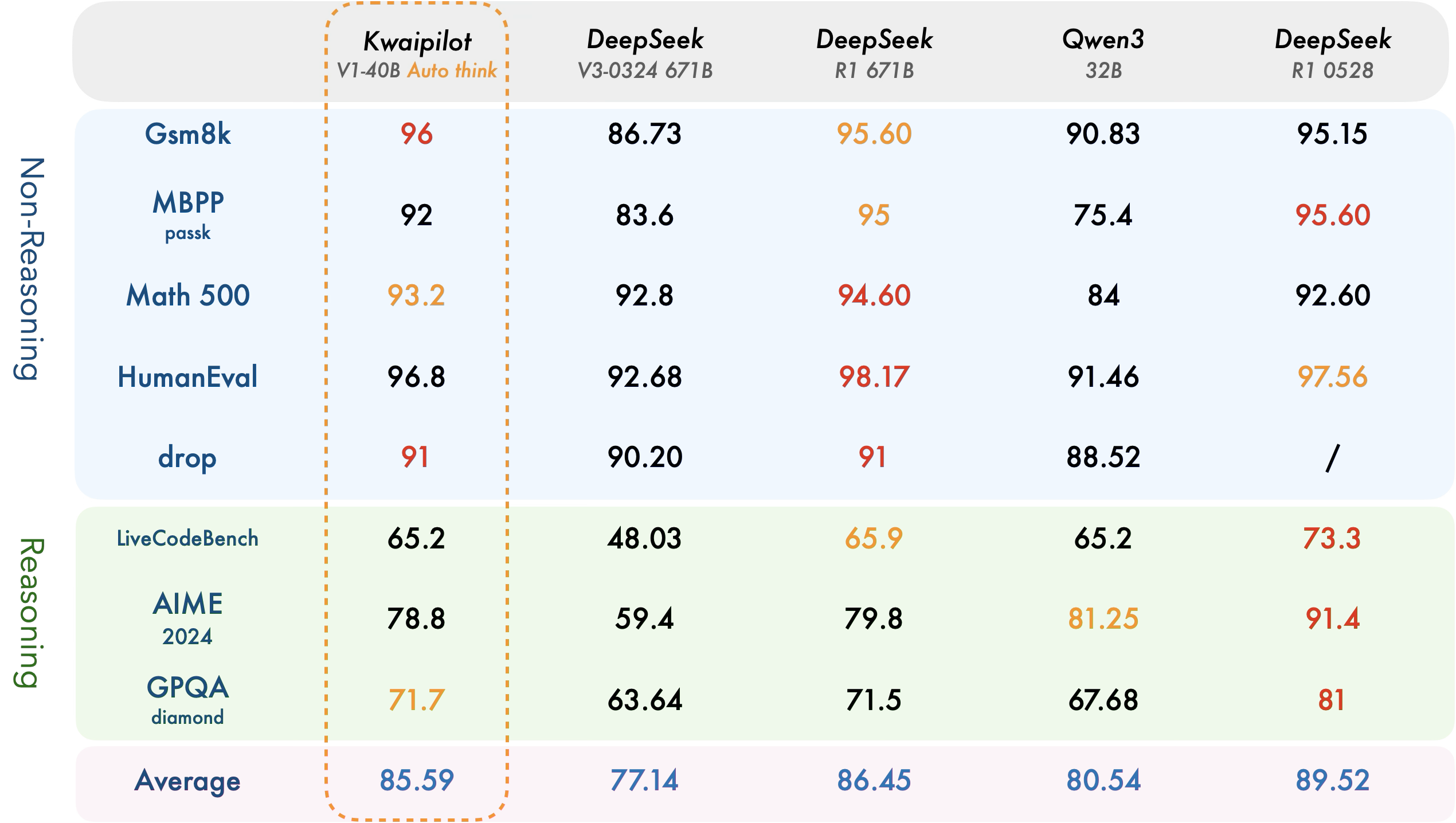
【快手拥抱开源】通过快手团队开源的 KwaiCoder-AutoThink-preview 解锁大语言模型的潜力
引言: 在人工智能快速发展的浪潮中,快手Kwaipilot团队推出的 KwaiCoder-AutoThink-preview 具有里程碑意义——这是首个公开的AutoThink大语言模型(LLM)。该模型代表着该领域的重大突破,通过独特方式融合思考与非思考…...

NFT模式:数字资产确权与链游经济系统构建
NFT模式:数字资产确权与链游经济系统构建 ——从技术架构到可持续生态的范式革命 一、确权技术革新:构建可信数字资产基石 1. 区块链底层架构的进化 跨链互操作协议:基于LayerZero协议实现以太坊、Solana等公链资产互通,通过零知…...

【JavaSE】绘图与事件入门学习笔记
-Java绘图坐标体系 坐标体系-介绍 坐标原点位于左上角,以像素为单位。 在Java坐标系中,第一个是x坐标,表示当前位置为水平方向,距离坐标原点x个像素;第二个是y坐标,表示当前位置为垂直方向,距离坐标原点y个像素。 坐标体系-像素 …...

Caliper 配置文件解析:config.yaml
Caliper 是一个区块链性能基准测试工具,用于评估不同区块链平台的性能。下面我将详细解释你提供的 fisco-bcos.json 文件结构,并说明它与 config.yaml 文件的关系。 fisco-bcos.json 文件解析 这个文件是针对 FISCO-BCOS 区块链网络的 Caliper 配置文件,主要包含以下几个部…...