轨迹优化 | 基于ESDF的共轭梯度优化算法(附ROS C++/Python仿真)
目录
- 0 专栏介绍
- 1 数值优化:共轭梯度法
- 2 基于共轭梯度法的轨迹优化
- 2.1 障碍约束函数
- 2.2 曲率约束函数
- 2.3 平滑约束函数
- 3 算法仿真
- 3.1 ROS C++实现
- 3.2 Python实现
0 专栏介绍
🔥课程设计、毕业设计、创新竞赛、学术研究必备!本专栏涉及更高阶的运动规划算法实战:曲线生成与轨迹优化、碰撞模型与检测、多智能体群控、深度强化学习运动规划、社会性导航、全覆盖路径规划等内容,每个模型都包含代码实现加深理解。
🚀详情:运动规划实战进阶
1 数值优化:共轭梯度法
共轭梯度法是一种用于解决大型稀疏线性方程组或无约束优化问题的迭代数值方法。它利用了线性代数中的共轭概念,并结合了梯度下降法的思想,以更有效地找到函数的极小值点。

形式化地,对于 n n n维二次优化问题
x ∗ = a r g min x 1 2 x T Q x + q T x \boldsymbol{x}^*=\mathrm{arg}\min _{\boldsymbol{x}}\frac{1}{2}\boldsymbol{x}^T\boldsymbol{Qx}+\boldsymbol{q}^T\boldsymbol{x} x∗=argxmin21xTQx+qTx
其中 Q \boldsymbol{Q} Q是 n n n维对称正定阵, q ∈ R n \boldsymbol{q}\in \mathbb{R} ^n q∈Rn,共轭梯度法既克服了梯度下降法收敛慢的缺点,又避免存储和计算牛顿类算法所需的二阶梯度信息,其核心原理是:求解矩阵 Q \boldsymbol{Q} Q的共轭向量组 d 0 , d 1 , ⋯ , d n \boldsymbol{d}_0,\boldsymbol{d}_1,\cdots ,\boldsymbol{d}_n d0,d1,⋯,dn作为 n n n个优化方向,由于优化方向间彼此正交,故每次迭代只需沿着一个方向 d i \boldsymbol{d}_i di寻优而互不影响。所以理论上最多 n n n次迭代就能找到最优解,收敛速度快,但实际应用中需要视具体情况确定阈值。
2 基于共轭梯度法的轨迹优化
对路径序列 X = { x i = ( x i , y i ) ∣ i ∈ [ 1 , N ] } \mathcal{X} =\left\{ \boldsymbol{x}_i=\left( x_i,y_i \right) |i\in \left[ 1,N \right] \right\} X={xi=(xi,yi)∣i∈[1,N]}设计优化目标函数
f ( X ) = w o P o b s ( X ) + w κ P c u r ( X ) + w s P s m o ( X ) f\left( \mathcal{X} \right) =w_oP_{\mathrm{obs}}\left( \mathcal{X} \right) +w_{\kappa}P_{\mathrm{cur}}\left( \mathcal{X} \right) +w_sP_{\mathrm{smo}}\left( \mathcal{X} \right) f(X)=woPobs(X)+wκPcur(X)+wsPsmo(X)
2.1 障碍约束函数
P o b s ( X ) = ∑ x i ∈ X σ o ( ∥ x i − o min ∥ 2 − d max ) P_{\mathrm{obs}}\left( \mathcal{X} \right) =\sum_{\boldsymbol{x}_i\in \mathcal{X}}^{}{\sigma _o\left( \left\| \boldsymbol{x}_i-\boldsymbol{o}_{\min} \right\| _2-d_{\max} \right)} Pobs(X)=xi∈X∑σo(∥xi−omin∥2−dmax)
惩罚机器人与障碍发生碰撞,其中 σ o ( ⋅ ) \sigma _o\left( \cdot \right) σo(⋅)是惩罚函数(可选为二次型); o min \boldsymbol{o}_{\min} omin是距离 x i \boldsymbol{x}_i xi最近的障碍物; d max d_{\max} dmax是距离阈值,节点与最近障碍物的距离超过阈值则不会受到惩罚。以二次型为例,其梯度为
∂ P o b s ( x i ) ∂ x i = 2 ( ∥ x i − o min ∥ 2 − d max ) ∂ ∥ x i − o min ∥ 2 ∂ x i = 2 ( ∥ x i − o min ∥ 2 − d max ) x i − o min ∥ x i − o min ∥ 2 \frac{\partial P_{\mathrm{obs}}\left( \boldsymbol{x}_i \right)}{\partial \boldsymbol{x}_i}=2\left( \left\| \boldsymbol{x}_i-\boldsymbol{o}_{\min} \right\| _2-d_{\max} \right) \frac{\partial \left\| \boldsymbol{x}_i-\boldsymbol{o}_{\min} \right\| _2}{\partial \boldsymbol{x}_i}\\=2\left( \left\| \boldsymbol{x}_i-\boldsymbol{o}_{\min} \right\| _2-d_{\max} \right) \frac{\boldsymbol{x}_i-\boldsymbol{o}_{\min}}{\left\| \boldsymbol{x}_i-\boldsymbol{o}_{\min} \right\| _2} ∂xi∂Pobs(xi)=2(∥xi−omin∥2−dmax)∂xi∂∥xi−omin∥2=2(∥xi−omin∥2−dmax)∥xi−omin∥2xi−omin
这里最小障碍通过ESDF获取,可以参考相关文章:
- ROS2从入门到精通5-1:详解代价地图与costmap插件编写(以距离场ESDF为例)
- 轨迹优化 | 图解欧氏距离场与梯度场算法(附ROS C++/Python实现)

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-toB9MWvL-1721696975312)(https://i-blog.csdnimg.cn/direct/2da70f16131b48e2a2dfb8e1cbf7a89b.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBATXIuV2ludGVyYA==,size_50,color_FFFFFF,t_30,g_se,x_16#pic_center =650x)]
2.2 曲率约束函数
P c u r ( X ) = ∑ x i ∈ X σ κ ( Δ ϕ i ∥ Δ x i ∥ 2 − κ max ) P_{\mathrm{cur}}\left( \mathcal{X} \right) =\sum_{\boldsymbol{x}_i\in \mathcal{X}}^{}{\sigma _{\kappa}\left( \frac{\varDelta \phi _i}{\left\| \varDelta \boldsymbol{x}_i \right\| _2}-\kappa _{\max} \right)} Pcur(X)=xi∈X∑σκ(∥Δxi∥2Δϕi−κmax)
对每个节点轨迹的瞬时曲率进行了上界约束,其中 σ κ ( ⋅ ) \sigma _{\kappa}\left( \cdot \right) σκ(⋅)是惩罚函数(可选为二次型); 是路径最大允许曲率——由机器人转向半径约束决定
其梯度为
∂ P c u r ( x i ) ∂ x i = α 1 ∂ κ i ∂ x i − 1 + α 2 ∂ κ i ∂ x i + α 3 ∂ κ i ∂ x i + 1 \frac{\partial P_{\mathrm{cur}}\left( \boldsymbol{x}_i \right)}{\partial \boldsymbol{x}_i}=\alpha _1\frac{\partial \kappa _i}{\partial \boldsymbol{x}_{i-1}}+\alpha _2\frac{\partial \kappa _i}{\partial \boldsymbol{x}_i}+\alpha _3\frac{\partial \kappa _i}{\partial \boldsymbol{x}_{i+1}} ∂xi∂Pcur(xi)=α1∂xi−1∂κi+α2∂xi∂κi+α3∂xi+1∂κi
为了求解该梯度,定义向量 a \boldsymbol{a} a在向量 b \boldsymbol{b} b的垂直分量为
a ⊥ b = a − a T b ∣ b ∣ ⋅ b ∣ b ∣ \boldsymbol{a}\bot \boldsymbol{b}=\boldsymbol{a}-\frac{\boldsymbol{a}^T\boldsymbol{b}}{\left| \boldsymbol{b} \right|}\cdot \frac{\boldsymbol{b}}{\left| \boldsymbol{b} \right|} a⊥b=a−∣b∣aTb⋅∣b∣b
则令
p 1 = Δ x i ⊥ ( − Δ x i + 1 ) ∥ Δ x i ∥ 2 ∥ Δ x i + 1 ∥ 2 , p 2 = ( − Δ x i + 1 ) ⊥ Δ x i ∥ Δ x i ∥ 2 ∥ Δ x i + 1 ∥ 2 \boldsymbol{p}_1=\frac{\varDelta \boldsymbol{x}_i\bot \left( -\varDelta \boldsymbol{x}_{i+1} \right)}{\left\| \varDelta \boldsymbol{x}_i \right\| _2\left\| \varDelta \boldsymbol{x}_{i+1} \right\| _2}, \boldsymbol{p}_2=\frac{\left( -\varDelta \boldsymbol{x}_{i+1} \right) \bot \varDelta \boldsymbol{x}_i}{\left\| \varDelta \boldsymbol{x}_i \right\| _2\left\| \varDelta \boldsymbol{x}_{i+1} \right\| _2} p1=∥Δxi∥2∥Δxi+1∥2Δxi⊥(−Δxi+1),p2=∥Δxi∥2∥Δxi+1∥2(−Δxi+1)⊥Δxi
从而
∂ κ i ∂ x i = 1 ∥ Δ x i ∥ 2 − 1 1 − cos 2 Δ ϕ ( − p 1 − p 2 ) − Δ ϕ i Δ x i ∥ Δ x i ∥ 2 3 ∂ κ i ∂ x i − 1 = 1 ∥ Δ x i ∥ 2 − 1 1 − cos 2 Δ ϕ p 2 + Δ ϕ i Δ x i ∥ Δ x i ∥ 2 3 ∂ κ i ∂ x i + 1 = 1 ∥ Δ x i ∥ 2 − 1 1 − cos 2 Δ ϕ p 1 \begin{aligned} \frac{\partial \kappa _i}{\partial \boldsymbol{x}_i}&=\frac{1}{\left\| \varDelta \boldsymbol{x}_i \right\| _2}\frac{-1}{\sqrt{1-\cos ^2\varDelta \phi}}\left( -\boldsymbol{p}_1-\boldsymbol{p}_2 \right) -\frac{\varDelta \phi _i\varDelta \boldsymbol{x}_i}{\left\| \varDelta \boldsymbol{x}_i \right\| _{2}^{3}}\\\frac{\partial \kappa _i}{\partial \boldsymbol{x}_{i-1}}&=\frac{1}{\left\| \varDelta \boldsymbol{x}_i \right\| _2}\frac{-1}{\sqrt{1-\cos ^2\varDelta \phi}}\boldsymbol{p}_2+\frac{\varDelta \phi _i\varDelta \boldsymbol{x}_i}{\left\| \varDelta \boldsymbol{x}_i \right\| _{2}^{3}}\\\frac{\partial \kappa _i}{\partial \boldsymbol{x}_{i+1}}&=\frac{1}{\left\| \varDelta \boldsymbol{x}_i \right\| _2}\frac{-1}{\sqrt{1-\cos ^2\varDelta \phi}}\boldsymbol{p}_1\end{aligned} ∂xi∂κi∂xi−1∂κi∂xi+1∂κi=∥Δxi∥211−cos2Δϕ−1(−p1−p2)−∥Δxi∥23ΔϕiΔxi=∥Δxi∥211−cos2Δϕ−1p2+∥Δxi∥23ΔϕiΔxi=∥Δxi∥211−cos2Δϕ−1p1
2.3 平滑约束函数
P s m o ( X ) = ∑ x i ∈ X ∥ Δ x i − Δ x i + 1 ∥ 2 2 P_{\mathrm{smo}}\left( \mathcal{X} \right) =\sum_{\boldsymbol{x}_i\in \mathcal{X}}^{}{\left\| \varDelta \boldsymbol{x}_i-\varDelta \boldsymbol{x}_{i+1} \right\| _{2}^{2}} Psmo(X)=xi∈X∑∥Δxi−Δxi+1∥22
期望每段轨迹的长度近似相等,使整体运动更平坦,其梯度为
∂ P s m o ( x i ) ∂ x i = 2 ( x i − 2 − 4 x i − 1 + 6 x i − 4 x i + 1 + x i + 2 ) \frac{\partial P_{\mathrm{smo}}\left( \boldsymbol{x}_i \right)}{\partial \boldsymbol{x}_i}=2\left( \boldsymbol{x}_{i-2}-4\boldsymbol{x}_{i-1}+6\boldsymbol{x}_i-4\boldsymbol{x}_{i+1}+\boldsymbol{x}_{i+2} \right) ∂xi∂Psmo(xi)=2(xi−2−4xi−1+6xi−4xi+1+xi+2)
3 算法仿真
3.1 ROS C++实现
核心算法如下所示:
bool CGOptimizer::optimize(Points2d& path_o)
{// distance map updateboost::shared_ptr<costmap_2d::DistanceLayer> distance_layer;bool is_distance_layer_exist = false;for (auto layer = costmap_ros_->getLayeredCostmap()->getPlugins()->begin();layer != costmap_ros_->getLayeredCostmap()->getPlugins()->end(); ++layer){distance_layer = boost::dynamic_pointer_cast<costmap_2d::DistanceLayer>(*layer);if (distance_layer){is_distance_layer_exist = true;break;}}if (!is_distance_layer_exist)ROS_ERROR("Failed to get a Distance layer for potentional application.");int iter = 0;while (iter < max_iter_){// choose the first three nodes of the pathfor (int i = 2; i < path_o.size() - 2; ++i){Eigen::Vector2d xi_c2(path_o[i - 2].first, path_o[i - 2].second);Eigen::Vector2d xi_c1(path_o[i - 1].first, path_o[i - 1].second);Eigen::Vector2d xi(path_o[i].first, path_o[i].second);Eigen::Vector2d xi_p1(path_o[i + 1].first, path_o[i + 1].second);Eigen::Vector2d xi_p2(path_o[i + 2].first, path_o[i + 2].second);Eigen::Vector2d correction = Eigen::Vector2d::Zero();correction = correction + _calObstacleTerm(xi, distance_layer);if (!_insideMap((xi - correction)[0], (xi - correction)[1]))continue;correction = correction + _calSmoothTerm(xi_c2, xi_c1, xi, xi_p1, xi_p2);if (!_insideMap((xi - correction)[0], (xi - correction)[1]))continue;correction = correction + _calCurvatureTerm(xi_c1, xi, xi_p1);if (!_insideMap((xi - correction)[0], (xi - correction)[1]))continue;Eigen::Vector2d gradient = alpha_ * correction / (w_obstacle_ + w_smooth_ + w_curvature_);if (std::isnan(gradient[0]) || std::isnan(gradient[1]))gradient = Eigen::Vector2d::Zero();xi = xi - gradient;path_o[i] = std::make_pair(xi[0], xi[1]);}iter++;}return true;
}


3.2 Python实现
核心算法如下所示:
while i < self.max_iter:for j in range(2, pts_num - 2):xjm2 = np.array([[optimized_path[j - 2][0]], [optimized_path[j - 2][1]]])xjm1 = np.array([[optimized_path[j - 1][0]], [optimized_path[j - 1][1]]])xj = np.array([[optimized_path[j][0]], [optimized_path[j][1]]])xjp1 = np.array([[optimized_path[j + 1][0]], [optimized_path[j + 1][1]]])xjp2 = np.array([[optimized_path[j + 2][0]], [optimized_path[j + 2][1]]])gradient = np.zeros((2, 1))# obstacle avoidancegradient = gradient + self.obstacleTerm(xj)if not self.isOnGrid(xj - gradient):continue# smoothgradient = gradient + self.smoothTerm(xjm2, xjm1, xj, xjp1, xjp2)if not self.isOnGrid(xj - gradient):continue# curvaturegradient = gradient + self.curvatureTerm(xjm1, xj, xjp1)if not self.isOnGrid(xj - gradient):continuexj = xj - self.alpha * gradient / self.w_totaloptimized_path[j, :] = xj[:, 0]i += 1self.trajectory = optimized_path

完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …
相关文章:
轨迹优化 | 基于ESDF的共轭梯度优化算法(附ROS C++/Python仿真)
目录 0 专栏介绍1 数值优化:共轭梯度法2 基于共轭梯度法的轨迹优化2.1 障碍约束函数2.2 曲率约束函数2.3 平滑约束函数 3 算法仿真3.1 ROS C实现3.2 Python实现 0 专栏介绍 🔥课程设计、毕业设计、创新竞赛、学术研究必备!本专栏涉及更高阶的…...
深入浅出WebRTC—ALR
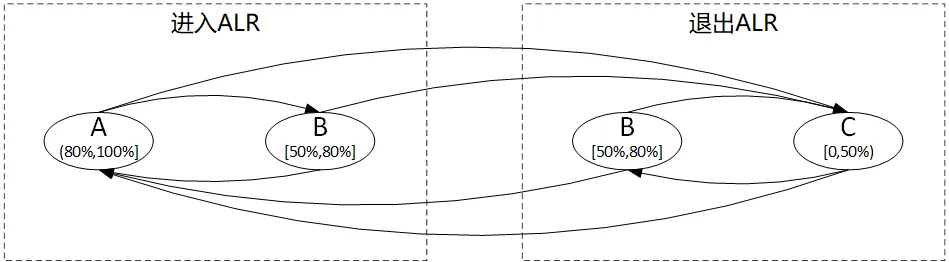
ALR(Application Limited Region)指的是网络传输过程中,由于应用层的限制(而非网络拥塞)导致带宽未被充分利用的情况。在这种情况下,应用层可能因为处理能力、手动配置或其他因素无法充分利用可用带宽&…...

BSV区块链技术现实应用原理解析
BSV区块链以其卓越的可扩展性、坚如磐石的安全性、极低的交易成本等特性,成为满足企业当下需求并为企业未来成功奠基铺路的理想技术。 BSV协会近期发布了一个题为《驾驭数字化转型:在自动化世界中建立信任——区块链在数据保护和交易优化中的角色》的报…...

七大基于比较的排序算法
目录 一、基于比较的排序算法概述 1. 插入排序(Insertion Sort) 2. 选择排序(Selection Sort) 3. 冒泡排序(Bubble Sort) 4. 归并排序(Merge Sort) 5. 快速排序(Qu…...
)
web前端 React 框架面试200题(四)
面试题 97. React 两种路由模式的区别?hash和history? 参考回答: 1: hash路由 hash模式是通过改变锚点(#)来更新页面URL,并不会触发页面重新加载,我们可以通过window.onhashchange监听到hash的改变,从而处…...
5.Fabric的共识机制
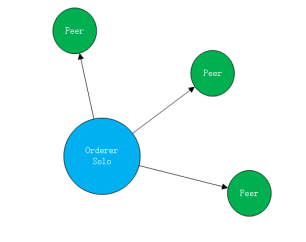
在Fabric中,有以下3中典型共识机制。 Solo共识 solo共识机制只能用于单节点模式,即只能有一个Orderer节点,因此,其共识过程很简单,每接收到一个交易信息,就在共识模块的控制下产生区块并广播给节点存储到账本中。 Solo 模式下的共识只适用于一个Orderer节点,所以可以在…...

【safari】react在safari浏览器中,遇到异步时间差的问题,导致状态没有及时更新到state,引起传参错误。如何解决
在safari浏览器中,可能会遇到异步时间差的问题,导致状态没有及时更新到state,引起传参错误。 PS:由于useState是一个普通的函数, 定义为() > void;因此此处不能用await/async替代setTimeout,只能用在返…...

京准:GPS北斗卫星授时信号安全隔离防护装置
京准:GPS北斗卫星授时信号安全隔离防护装置 京准:GPS北斗卫星授时信号安全隔离防护装置 1、主要特点 ★信号加固功能: GPS/BDS单系统信号拒止情况下(包含受到GPS L1欺骗干扰、GPS L1压制干扰、BDS B1欺骗干扰、BDS B1压制干扰&…...

解决方案架构师系列 - AWS - Pinpoint
AWS Pinpoint介绍 Amazon Pinpoint 为营销人员和开发人员提供了一款可自定义的工具,助力他们大规模地开展跨渠道、行业和活动的客户通信。 Amazon Pinpoint是一个全面的客户参与平台,旨在帮助营销人员和开发人员大规模地开展跨渠道、行业和活动的客…...

MF173:将多个工作表转换成PDF文件
我给VBA的定义:VBA是个人小型自动化处理的有效工具。利用好了,可以大大提高自己的工作效率,而且可以提高数据的准确度。“VBA语言専攻”提供的教程一共九套,分为初级、中级、高级三大部分,教程是对VBA的系统讲解&#…...

Docker、containerd、CRI-O 和 runc 之间的区别
容器与 Docker 这个名称并不紧密相关。你可以使用其他工具来运行容器 您可以使用 Docker 或一堆非Docker 的其他工具来运行容器。docker只是众多选项之一,Docker(公司)在生态系统中创建了一些很棒的工具,但不是全部。 容器方面有…...

PRISM-Python 中的规则一个简单的 Python 规则感应系统
欢迎来到雲闪世界.PRISM 是一种现有算法(尽管我确实创建了一个 Python 实现),PRISM 相对简单,但在机器学习中,有时最复杂的解决方案效果最好,有时最简单的解决方案效果最好。然而,当我们希望建立…...

DB-GPT:LLM应用的集大成者
整体架构 架构解读 可以看到,DB-GPT把架构抽象为7层,自下而上分别为: 运行环境:支持本地/云端&单机/分布式等部署方式。顺便一提,RAY是蚂蚁深度参与的一个开源项目,所以对RAY功能的支持应该非常完善。…...
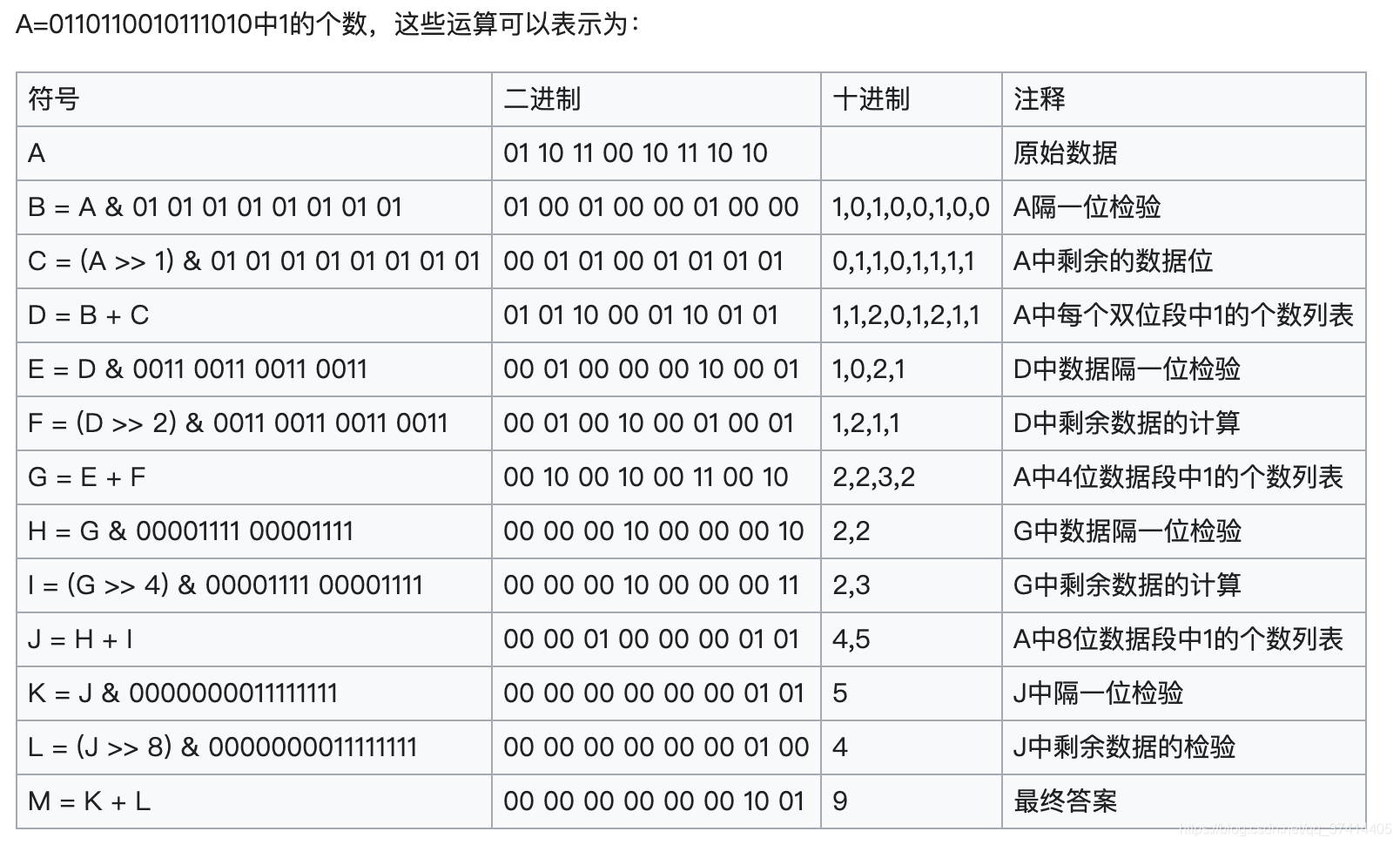
汉明权重(Hamming Weight)(统计数据中1的个数)VP-SWAR算法
汉明权重(Hamming Weight)(统计数据中1的个数)VP-SWAR算法 定义 汉明重量是一串符号中非零符号的个数。它等于同样长度的全零符号串的汉明距离(在信息论中,两个等长字符串之间的汉明距离等于两个字符串对应位置的不同…...

基于 PyTorch 的模型瘦身三部曲:量化、剪枝和蒸馏,让模型更短小精悍!
基于 PyTorch 的模型量化、剪枝和蒸馏 1. 模型量化1.1 原理介绍1.2 PyTorch 实现 2. 模型剪枝2.1 原理介绍2.2 PyTorch 实现 3. 模型蒸馏3.1 原理介绍3.2 PyTorch 实现 参考文献 1. 模型量化 1.1 原理介绍 模型量化是将模型参数从高精度(通常是 float32࿰…...

二、原型模式
文章目录 1 基本介绍2 实现方式深浅拷贝目标2.1 使用 Object 的 clone() 方法2.1.1 代码2.1.2 特性2.1.3 实现深拷贝 2.2 在 clone() 方法中使用序列化2.2.1 代码 2.2.2 特性 3 实现的要点4 Spring 中的原型模式5 原型模式的类图及角色5.1 类图5.1.1 不限制语言5.1.2 在 Java 中…...

【目标检测】Anaconda+PyTorch(GPU)+PyCharm(Yolo5)配置
前言 本文主要介绍在windows系统上的Anaconda、PyTorch、PyCharm、Yolov5关键步骤安装,为使用yolo所需的环境配置完善。同时也算是记录下我的配置流程,为以后用到的时候能笔记查阅。 Anaconda 软件安装 Anaconda官网:https://www.anaconda…...

Django实战项目之进销存数据分析报表——第二天:项目创建和 PyCharm 配置
在上一篇博客中,我们讨论了如何搭建一个全栈 Web 应用的开发环境,包括 Python 环境的创建、Django 和 MySQL 的安装以及前端技术栈的选择。现在,让我们继续深入,学习如何在 PyCharm 中创建一个新的 Django 项目并进行配置。 一…...

静态路由实验
1.实验拓扑图 二、实验要求 1.R6为ISP,接口IP地址均为公有地址,该设备只能配置IP地址,之后不能再对其进行任何配置; 2.R1-R5为局域网,私有IP地址192.168.1.0/24,请合理分配; 3.R1、R2、R4&…...

VSCode STM32嵌入式开发插件记录
要卸载之前搭建的VSCode嵌入式开发环境了,记录一下用的插件。 1.Cortex-Debug https://github.com/Marus/cortex-debug 2.Embedded IDE https://github.com/github0null/eide 3.Keil uVision Assistant https://github.com/jacksonjim/keil-assistant/ 4.RTO…...
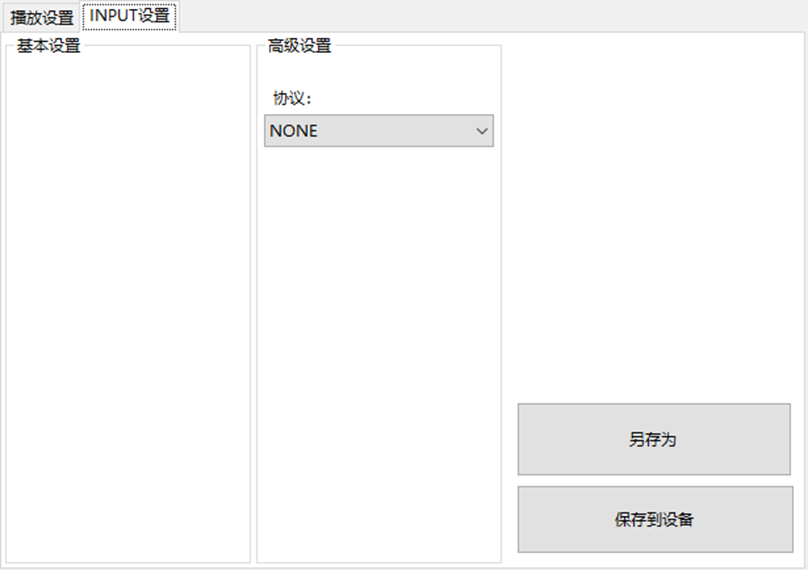
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器的上位机配置操作说明
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器专为工业环境精心打造,完美适配AGV和无人叉车。同时,集成以太网与语音合成技术,为各类高级系统(如MES、调度系统、库位管理、立库等)提供高效便捷的语音交互体验。 L…...
使用rpicam-app通过网络流式传输视频)
树莓派超全系列教程文档--(62)使用rpicam-app通过网络流式传输视频
使用rpicam-app通过网络流式传输视频 使用 rpicam-app 通过网络流式传输视频UDPTCPRTSPlibavGStreamerRTPlibcamerasrc GStreamer 元素 文章来源: http://raspberry.dns8844.cn/documentation 原文网址 使用 rpicam-app 通过网络流式传输视频 本节介绍来自 rpica…...

PPT|230页| 制造集团企业供应链端到端的数字化解决方案:从需求到结算的全链路业务闭环构建
制造业采购供应链管理是企业运营的核心环节,供应链协同管理在供应链上下游企业之间建立紧密的合作关系,通过信息共享、资源整合、业务协同等方式,实现供应链的全面管理和优化,提高供应链的效率和透明度,降低供应链的成…...

React Native在HarmonyOS 5.0阅读类应用开发中的实践
一、技术选型背景 随着HarmonyOS 5.0对Web兼容层的增强,React Native作为跨平台框架可通过重新编译ArkTS组件实现85%以上的代码复用率。阅读类应用具有UI复杂度低、数据流清晰的特点。 二、核心实现方案 1. 环境配置 (1)使用React Native…...

在 Nginx Stream 层“改写”MQTT ngx_stream_mqtt_filter_module
1、为什么要修改 CONNECT 报文? 多租户隔离:自动为接入设备追加租户前缀,后端按 ClientID 拆分队列。零代码鉴权:将入站用户名替换为 OAuth Access-Token,后端 Broker 统一校验。灰度发布:根据 IP/地理位写…...

vue3 字体颜色设置的多种方式
在Vue 3中设置字体颜色可以通过多种方式实现,这取决于你是想在组件内部直接设置,还是在CSS/SCSS/LESS等样式文件中定义。以下是几种常见的方法: 1. 内联样式 你可以直接在模板中使用style绑定来设置字体颜色。 <template><div :s…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个生活电费的缴纳和查询小程序
一、项目初始化与配置 1. 创建项目 ohpm init harmony/utility-payment-app 2. 配置权限 // module.json5 {"requestPermissions": [{"name": "ohos.permission.INTERNET"},{"name": "ohos.permission.GET_NETWORK_INFO"…...
SpringTask-03.入门案例
一.入门案例 启动类: package com.sky;import lombok.extern.slf4j.Slf4j; import org.springframework.boot.SpringApplication; import org.springframework.boot.autoconfigure.SpringBootApplication; import org.springframework.cache.annotation.EnableCach…...

聊一聊接口测试的意义有哪些?
目录 一、隔离性 & 早期测试 二、保障系统集成质量 三、验证业务逻辑的核心层 四、提升测试效率与覆盖度 五、系统稳定性的守护者 六、驱动团队协作与契约管理 七、性能与扩展性的前置评估 八、持续交付的核心支撑 接口测试的意义可以从四个维度展开,首…...
)
.Net Framework 4/C# 关键字(非常用,持续更新...)
一、is 关键字 is 关键字用于检查对象是否于给定类型兼容,如果兼容将返回 true,如果不兼容则返回 false,在进行类型转换前,可以先使用 is 关键字判断对象是否与指定类型兼容,如果兼容才进行转换,这样的转换是安全的。 例如有:首先创建一个字符串对象,然后将字符串对象隐…...