基于 systemc-2.3.1的virtual device 接入 qemu-arm
1,下载systemc-2.3.1
下载网址:
SystemC Files
$ wget https://www.accellera.org/images/downloads/standards/systemc/systemc-2.3.1.tgz
2,编译安装 systemc-2.3.1
tar zxf systemc-2.3.1.tgz
cd systemc-2.3.1/
export CXX=g++
mkdir build
cd build/
mkdir /home/hipper/ex_systemc_qemu/toolchain/SystemC # who i am -> hipper
export CXX=g++
../configure --prefix=/home/hipper/ex_systemc_qemu/toolchain/SystemC
make -j
make install
ls /home/hipper/ex_systemc_qemu/toolchain/SystemC
3,下载 demo
3.1 下载
打开:
https://caslab.ee.ncku.edu.tw/dokuwiki/course:ca:106
wget 之:
$ wget https://caslab.ee.ncku.edu.tw/dokuwiki/_media/course:ca:106a:ca_lab_attachedfiles.zip3.2 解压编译
$ unzip course\:ca\:106a\:ca_lab_attachedfiles.zip
$ cd CA_LAB_AttachedFiles/
$ unzip LAB4.zip
$ cd LAB4/
$ ls
![]()
$ cd SystemC_Module/
$ vim makefile
修改: CXX 和 SYSTEMC_DIR 的值;
CXX :=g++ -std=c++11SYSTEMC_DIR :=/home/hipper/ex_systemc_qemu/toolchain/SystemC$ make -j
$ ls

3.3 运行demo
$ export LD_LIBRARY_PATH=/home/hipper/ex_systemc_qemu/toolchain/SystemC/lib-linux64
$ ./qsysbridge

4,源码安装 qemu-arm
一堆普通用户命令:
git clone https://github.com/qemu/qemu.git
cd qemu/
git checkout v9.0.0
mkdir build_v9_arm/
cd ../build_v9_arm/
../configure --target-list="arm-softmmu,arm-linux-user" --prefix=/home/hipper/ex_systemc_qemu/qemu-bin-v9-arm
make -j
make install$ ls /home/hipper/ex_systemc_qemu/qemu-bin-v9-arm

其中,qemu-arm 由配置选项 arm-linux-user 指定;
而 qemu-system-arm 由qemu编译前配置选项 arm-softmmu 指定。
5,在qemu中安装Linux
5.1 获得x86上的cross arm-gcc
5.1.1 安装
$ sudo apt-get install gcc-arm-linux-gnueabi#check
$ dpkg -l gcc-arm-linux-gnueabi
5.1.2 测试 arm-gcc 和 qemu-arm
实例代码
hello.c
#include <stdio.h>int main()
{printf("Hello world!!!!!\n");return 0;
}编译:
$ arm-linux-gnueabi-gcc hello.c -o hello设置:
error1:
qemu-arm: Could not open '/lib/ld-linux.so.3': No such file or directory
$ sudo find /usr/ -name ld-linux.so.3
/usr/arm-linux-gnueabihf/lib/ld-linux.so.3
/usr/arm-linux-gnueabi/lib/ld-linux.so.3
error2:
![]()
$ sudo find /usr/ -name libc.so.6
/usr/arm-linux-gnueabihf/lib/libc.so.6
/usr/arm-linux-gnueabi/lib/libc.so.6
/usr/lib/i386-linux-gnu/libc.so.6
/usr/lib/x86_64-linux-gnu/libc.so.6
$ sudo cp /usr/arm-linux-gnueabi/lib/ld-linux.so.3 /lib/
$ export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/arm-linux-gnueabi/lib这个 /lib/ld-linux.so.3 测试结束后可以删掉
运行:
$ ../qemu-bin-v9-arm/bin/qemu-arm -L /usr/lib/gcc-cross/arm-linux-gnueabi/11/ -L /usr/arm-linux-gnueabi/lib/ ./hello效果:
![]()
5.2 下载编译 Linux kernel
$ wget https://github.com/torvalds/linux/archive/refs/tags/v5.10.tar.gz
$ tar zxf v5.10.tar.gz
$ cd linux-5.10/
./linux-5.10$ cp ../../CA_LAB_AttachedFiles/LAB3/kernel/config-4.14.85-realview-arm1136 ./.config
/linux-5.10$ make ARCH=arm menuconfig<Exit>./linux-5.10$ make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm -j//## or seprated steps:
./linux-5.10$ make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm -j zImage
./linux-5.10$ make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm dtbs
使用了一个非常简单的arm arch 的config 文件:
./linux-5.10$ cp ../../CA_LAB_AttachedFiles/LAB3/kernel/config-4.14.85-realview-arm1136 ./.config
编译结果:

device tree of arm-realview-eb.dtb

5.3 下载编译 busybox
使用 wget 下载,配置方式可以宽松一点,直接 make menuconfig ARCH=arm,然后使用交叉编译器编译
$ wget https://busybox.net/downloads/busybox-1.35.0.tar.bz2
$ cd ./busybox-1.35.0/
$ make ARCH=arm menuconfig
<Exit>
<Yes>$ make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm -j
编译结果:

$ make install CROSS_COMPILE=arm-linux-gnueabi-
$ ls _install/

5.4 Building Initrd ramdisk
5.4.1 准备文件
cd _install/
cp ../../../CA_LAB_AttachedFiles/LAB3/busybox/etc.tar.gz ./
tar zxf etc.tar.gz
ls etc
将 命令
$ ../qemu-bin-v9-arm/bin/qemu-arm -L /usr/lib/gcc-cross/arm-linux-gnueabi/11/ -L /usr/arm-linux-gnueabi/lib/ ./hello
中通过 -L 暴露给qemu-arm 的 .so 文件,别忘记 ld-linux.so.3,全部拷贝到 _install/lib/ 中:
$ mkdir lib
$ cp -r /usr/lib/gcc-cross/arm-linux-gnueabi/11/* ./
$ cp -r /usr/arm-linux-gnueabi/lib/* ./
$ cp /usr/arm-linux-gnueabi/lib/ld-linux.so.3 ./
5.4.2 制作 initrd.gz
$ cd ./_install/
$ find . | cpio --create --format=newc > ../initrd
$ gzip -f ../initrd
$ ls ../initrd.gz -all -h![]()
5.5 QEMU 中启动 Linux
必须的文件:
qemu-system-arm, zImage, initrd.gz arm-realview-eb.dtb
//# qemu-system-arm:
./qemu-bin-v9-arm/bin/qemu-system-arm//# zImage:
./uboot_kernel/linux-5.10/arch/arm/boot/zImage//# Initrd.gz:
./uboot_kernel/busybox-1.35.0/initrd.gz//# Device tree:
./uboot_kernel/linux-5.10/arch/arm/boot/dts/arm-realview-eb.dtb启动Linux:
../qemu-bin-v9-arm/bin/qemu-system-arm \
-M realview-eb \
-m 128M \
-cpu arm1136 \
-kernel ../uboot_kernel/linux-5.10/arch/arm/boot/zImage \
-initrd ../uboot_kernel/busybox-1.35.0/initrd.gz \
-nographic -serial mon:stdio \
-dtb ../uboot_kernel/linux-5.10/arch/arm/boot/dts/arm-realview-eb.dtb保持内存数量为 -m 128M \
文件系统问题,导致出错:

Errors:

再看看。。。
构建qemu和vexpress 板子的仿真环境:
#!/usr/bin/bash
mkdir workspace2
cd workspace2
WORK_DIR=${PWD}
git clone https://github.com/qemu/qemu.git
cd qemu/
git checkout v9.0.0
mkdir ./build_arm/
cd ./build_arm/
../configure --target-list="arm-softmmu,arm-linux-user" --prefix=${WORK_DIR}/qemu-bin-arm/
make -j
make install
cd ../../
sudo ls
sudo apt-get install gcc-arm-linux-gnueabi
wget https://mirrors.edge.kernel.org/pub/linux/kernel/v5.x/linux-5.10.tar.gz
tar zxf linux-5.10.tar.gz
cd linux-5.10/
make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm vexpress_defconfig
make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm -j
cd ../
wget https://ftp.denx.de/pub/u-boot/u-boot-2020.10.tar.bz2
tar xf u-boot-2020.10.tar.bz2
cd u-boot-2020.10/
make vexpress_ca9x4_defconfig
make CROSS_COMPILE=arm-linux-gnueabi- all
cd ../
wget https://busybox.net/downloads/busybox-1.36.0.tar.bz2
tar xf busybox-1.36.0.tar.bz2
cd busybox-1.36.0/
make defconfig
make CROSS_COMPILE=arm-linux-gnueabi-
make install CROSS_COMPILE=arm-linux-gnueabi-
cd ../
mkdir -p rootfs/{dev,etc/init.d,lib,proc,sys,root,home}
sudo cp busybox-1.36.0/_install/* -r rootfs/
sudo cp -P /usr/arm-linux-gnueabi/lib/* rootfs/lib/
sudo mknod rootfs/dev/tty1 c 4 1 && sudo mknod rootfs/dev/tty2 c 4 2 && sudo mknod rootfs/dev/tty3 c 4 3 && sudo mknod rootfs/dev/tty4 c 4 4
dd if=/dev/zero of=a9rootfs.ext3 bs=1M count=1024
mkfs.ext3 a9rootfs.ext3
sudo mkdir tmpfs && sudo mount -t ext3 a9rootfs.ext3 tmpfs/ -o loop && sudo cp -r rootfs/* tmpfs/ && sudo umount tmpfs
${WORK_DIR}/qemu-bin-arm/bin/qemu-system-arm -M vexpress-a9 -m 512M \
-kernel ./linux-5.10/arch/arm/boot/zImage \
-dtb ./linux-5.10/arch/arm/boot/dts/vexpress-v2p-ca9.dtb \
-nographic -append "root=/dev/mmcblk0 console=ttyAMA0" -sd a9rootfs.ext3vexpress 平台结构:
从 这份文档中《ARM® CoreTile Express A9×4 Cortex®-A9 MPCore (V2P-CA9) Technical Reference Manual》发现如下内存布局:


添加硬件:
添加 LKM:
添加 app:
重建系统
在qemu中添加硬件,在linux中添加LKM,在用户态添加app后,重新编译整个系统:
update_buildup.sh
#!/usr/bin/bash
#mkdir workspace2
cd workspace2
WORK_DIR=${PWD}
#git clone https://github.com/qemu/qemu.git
cd qemu/
#git checkout v9.0.0
#mkdir build_arm/
cd ../build_arm/
#../configure --target-list="arm-softmmu,arm-linux-user" --prefix=${WORK_DIR}/qemu-bin-arm/
make -j
make install
cd ../
sudo ls
#sudo apt-get install gcc-arm-linux-gnueabi#wget https://mirrors.edge.kernel.org/pub/linux/kernel/v5.x/linux-5.10.tar.gz
#tar zxf linux-5.10.tar.gz
cd linux-5.10/
#make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm vexpress_defconfig
make CROSS_COMPILE=arm-linux-gnueabi- ARCH=arm -j
cd ../#wget https://ftp.denx.de/pub/u-boot/u-boot-2020.10.tar.bz2
#tar xf u-boot-2020.10.tar.bz2
#cd u-boot-2020.10/
#make vexpress_ca9x4_defconfig
#make CROSS_COMPILE=arm-linux-gnueabi- all
#cd ../#wget https://busybox.net/downloads/busybox-1.36.0.tar.bz2
#tar xf busybox-1.36.0.tar.bz2
#cd busybox-1.36.0/
#make defconfig
#make CROSS_COMPILE=arm-linux-gnueabi-
#make install CROSS_COMPILE=arm-linux-gnueabi-
#cd ../
#mkdir -p rootfs/{dev,etc/init.d,lib,proc,sys,root,home}
#sudo cp busybox-1.36.0/_install/* -r rootfs/
#sudo cp -P /usr/arm-linux-gnueabi/lib/* rootfs/lib/
#sudo mknod rootfs/dev/tty1 c 4 1 && sudo mknod rootfs/dev/tty2 c 4 2 && sudo mknod rootfs/dev/tty3 c 4 3 && sudo mknod rootfs/dev/tty4 c 4 4
rm a9rootfs.ext3
dd if=/dev/zero of=a9rootfs.ext3 bs=1M count=1024
mkfs.ext3 a9rootfs.ext3
sudo mkdir -p tmpfs && sudo mount -t ext3 a9rootfs.ext3 tmpfs/ -o loop && sudo cp -r rootfs/* tmpfs/ && sudo umount tmpfs${WORK_DIR}/qemu-bin-arm/bin/qemu-system-arm -M vexpress-a9 -m 512M \
-kernel ./linux-5.10/arch/arm/boot/zImage \
-dtb ./linux-5.10/arch/arm/boot/dts/vexpress-v2p-ca9.dtb \
-nographic -append "root=/dev/mmcblk0 console=ttyAMA0" -sd a9rootfs.ext3相关文章:
基于 systemc-2.3.1的virtual device 接入 qemu-arm
1,下载systemc-2.3.1 下载网址: SystemC Files $ wget https://www.accellera.org/images/downloads/standards/systemc/systemc-2.3.1.tgz 2,编译安装 systemc-2.3.1 tar zxf systemc-2.3.1.tgz cd systemc-2.3.1/ export CXXg mkdir bu…...
自动化测试)
(七)自动化测试
1. 简述什么是UI自动化测试? 正确回答通过率:78.0%[ 详情 ] 推荐指数: ★★★★ 试题难度: 中级 UI自动化测试(User Interface Automation Testing)是一种通过编写脚本或使用自动化测试工具,对用户界面(UI)进行自动化测试的方法。它可以模拟用户与应用程序或网站的交…...
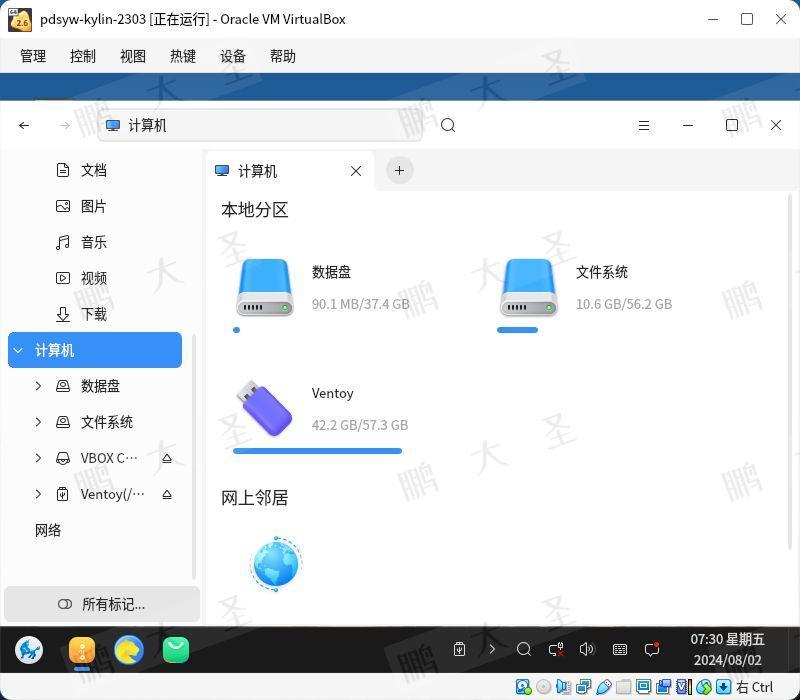
【信创】virtualbox内虚拟机连接U盘 _ 统信 _ 麒麟 _ 中科方德
原文链接:【信创】virtualbox内虚拟机连接U盘 | 统信 | 麒麟 | 中科方德 Hello,大家好啊!今天给大家带来一篇关于在信创操作系统上使用VirtualBox虚拟机连接物理主机U盘的文章。在使用VirtualBox虚拟机时,有时候需要将物理主机上的…...

【2024】Datawhale AI夏令营 Task4笔记——vllm加速方式修改及llm推理参数调整上分
【2024】Datawhale AI夏令营 Task4笔记——vllm加速方式修改及llm推理参数调整上分 本文承接文章【2024】Datawhale AI夏令营 Task3笔记——Baseline2部分代码解读及初步上分思路,对其中vllm加速方式进行修改,推理速度获得了极大提升。另外,…...

腾讯OCR签名算法
云服务器 签名方法 v3-调用方式-API 中心-腾讯云 一,签名算法-官网 copy官网 package com.smcv.customer.service.util;import org.springframework.http.HttpHeaders;import javax.crypto.Mac; import javax.crypto.spec.SecretKeySpec; import javax.xml.bind.D…...

CTFHUB-SSRF-DNS重绑定 Bypass
开启题目,页面空白,访问附件 附件是一个知乎的文章,翻到下面点击文中这个链接 跳转之后,进行设置 把得到的链接拼接到题目的后面进行访问,然后得到了本题的 flag...

【oracle】数据库基本使用
一、oracle数据库简介 Oracle 数据库,亦称 Oracle RDBMS,或简称 Oracle,是一款由甲骨文公司推出的高效、稳定且广泛应用的关系型数据库管理系统。该数据库系统不仅在数据管理领域处于领先地位,而且由于其良好的可移植性、易用性和…...
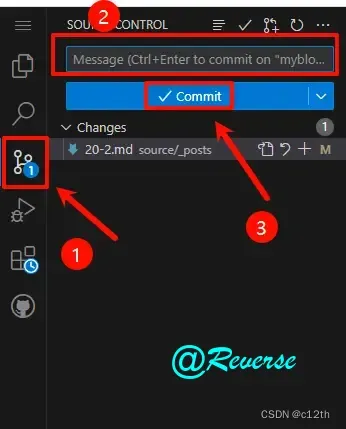
Action部署在线上写文章
原文:https://blog.c12th.cn/archives/32.html 前言 之前分别出了 Hexo 和 Hugo 的 Action搭建教程,相当于伪动态,可以在线上写文章了;不过对于喜欢魔改的同学就不太友好了qwq 教程 github.dev 确保在配置过程中能访问Github &…...
)
CC链 (Commons Collections)
目录 前置知识 CC链: https://mvnrepository.com/ CC链 CC链 Commons Collections --apache组织发布的开源库 里面主要对集合的增强以及扩展类 被广泛使用 组件,HashMap HashTable ArrayList总结CC链: 就是有反序列化入口,同时有cc库的情况下,…...

左手坐标系、右手坐标系、坐标轴方向
一、右手坐标系 1、y轴朝上:webgl、Threejs、Unity、Unreal、Maya、3D Builder x:向右y:向上z:向前(朝向观察者、指向屏幕外) 2、z轴朝上:cesium、blender x:向右y:向前…...

芋道源码yudao-cloud 二开日记(商品sku数据归类为规格属性)
商品的每一条规格和属性在数据库里都是单一的一条数据,从数据库里查出来后,该怎么归类为对应的规格和属性值?如下图: 在商城模块,商品的单规格、多规格、单属性、多属性功能可以说是非常完整,如下图&#x…...

自媒体新闻资讯类网站模板/EyouCMS自媒体资讯类网站模板
自媒体新闻资讯类网站模板,EyouCMS自媒体资讯类网站模板。模板自带eyoucms内核,无需再下载eyou系统,原创设计、手工书写DIVCSS,完美兼容IE7、Firefox、Chrome、360浏览器等;主流浏览器;结构容易优化&#x…...

Python3 第六十课 -- 实例二十九
目录 一. 冒泡排序 二. 归并排序 一. 冒泡排序 冒泡排序(Bubble Sort)也是一种简单直观的排序算法。它重复地走访过要排序的数列,一次比较两个元素,如果他们的顺序错误就把他们交换过来。走访数列的工作是重复地进行直到没有再…...

【JAVA入门】Day17 - GUI
【JAVA入门】Day17 - GUI 文章目录 【JAVA入门】Day17 - GUI一、组件二、事件 GUI 即图形化界面。 一、组件 一个 Java 的图形化界面项目主要用到了下面几种组件。 Java 中最外层的窗体叫做 JFrame。Java 中最上层的菜单叫做 JMenuBar。Java 中管理文字和图片的容器叫做 JLab…...
OpenAI API continuing conversation in a dialogue
题意:在对话中继续使用OpenAI API进行对话 问题背景: I am playing around with the openAI API and I am trying to continue a conversation. For example: 我正在尝试使用OpenAI API,并试图继续一段对话。例如: import open…...

6.前端怎么做一个验证码和JWT,使用mockjs模拟后端
流程图 创建一个发起请求 创建一个方法 getCaptchaImg() {this.$axios.get(/captcha).then(res > {console.log(res);this.loginForm.token res.data.data.tokenthis.captchaImg res.data.data.captchaImgconsole.log(this.captchaImg)})}, captchaImg: "", 创…...

Python酷库之旅-第三方库Pandas(064)
目录 一、用法精讲 251、pandas.Series.tz_localize方法 251-1、语法 251-2、参数 251-3、功能 251-4、返回值 251-5、说明 251-6、用法 251-6-1、数据准备 251-6-2、代码示例 251-6-3、结果输出 252、pandas.Series.at_time方法 252-1、语法 252-2、参数 252-3…...
)
MATLAB基础操作(二)
11.求方程2x^5-3x^371x^2-9x130的全部跟 >> p[2,0,-3,71,-9,13]; >> xroots(p); 12.求解线性方程组2x3y-z2 8x2y3z4 45x3y9z23 >> a[2,3,-1;8,2,3;45,3,9];%建立系数矩阵a >> b[2,4,23]%建立列向量b >> …...

win10 繁体简体字切换
1. 使用快捷键 Ctrl Shift F 2. 在语言设置中更改 | 点击任务栏上的“开始”按钮。 | 选择“设置”(齿轮图标)。 | 在弹出的“Windows 设置”窗口中,点击“时间和语言”。 | 选择“语言”选项。 | 在右侧找到您正在使用的输入法ÿ…...
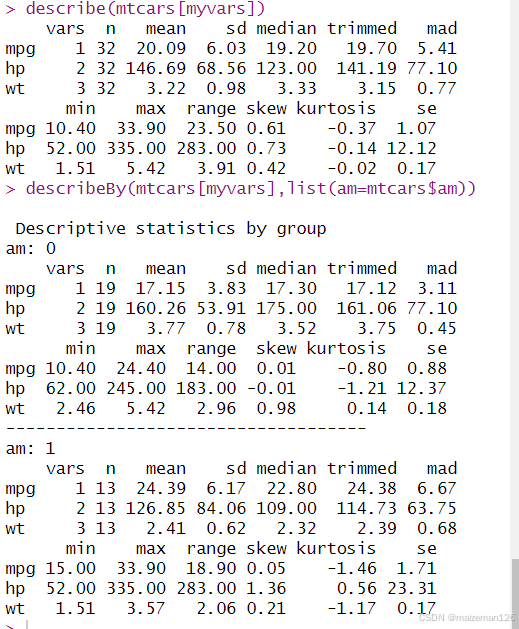
R语言统计分析——描述性统计
参考资料:R语言实战【第2版】 1、整体统计 对于R语言基础安装,可以使用summary()函数来获取描述性统计量。summary()函数提供了最小值、最大值、四分位数、中位数和算术平均数,以及因子向量和逻辑向量的频数统计。 myvars<-c("mpg&…...

MogFace人脸检测模型-WebUI实操手册:Linux服务器部署、日志排查、性能调优
MogFace人脸检测模型-WebUI实操手册:Linux服务器部署、日志排查、性能调优 1. 服务简介与核心价值 MogFace人脸检测模型是基于ResNet101架构的高精度检测解决方案,在CVPR 2022会议上发表并获得了广泛认可。这个WebUI服务让用户能够通过直观的界面快速部…...

如何用WeChatMsg永久保存微信聊天记录:从数据提取到情感记忆的完整指南
如何用WeChatMsg永久保存微信聊天记录:从数据提取到情感记忆的完整指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_T…...

基于OFA模型的智能客服系统开发:VQA技术实战
基于OFA模型的智能客服系统开发:VQA技术实战 想象一下这个场景:你是一家电商公司的客服主管,每天要处理上千张用户上传的图片问题——“这个商品有划痕正常吗?”、“我收到的包装破损了怎么办?”、“这个尺寸和我拍的…...

RANSAC平面拟合避坑指南:为什么你的点云总拟合出奇怪平面?参数调优实战
RANSAC平面拟合避坑指南:为什么你的点云总拟合出奇怪平面?参数调优实战 当你在处理三维点云数据时,是否遇到过这样的情况:明明场景中有一个明显的平面,但RANSAC算法却拟合出了一个完全错误的平面?或者拟合出…...

大族打标机 TCP 工具类优先设计 + 追溯打标业务落地
本文按工程实施顺序组织:大族 TCP 客户端工具类源码;追溯打标业务源码;IP、端口、模板名动态配置方案(含建表 SQL)。一、大族打标机 TCP 工具类1.1 协议约定大族打标常见指令(ASCII):…...

ArcGIS数据入库避坑指南:为什么你的BSM标识码总出错?3个常见问题解析
ArcGIS数据入库避坑指南:BSM标识码生成的3个致命陷阱与实战解决方案 自然资源数据入库就像给城市绘制数字身份证,而BSM标识码就是每块土地的"身份证号"。去年某省级国土调查项目中,37%的入库驳回案例都源于标识码错误——要么行政代…...

量化投资实战:揭秘阿尔法因子构建的五大关键步骤与优化策略
1. 阿尔法因子构建的完整流程 量化投资的核心在于寻找能够持续产生超额收益的阿尔法因子。很多刚入门的量化研究员常常陷入一个误区:拿到数据就直接开始构建因子。实际上,一个完整的因子构建流程应该像建造房子一样,从打地基开始一步步来。 我…...

如何利用CompressO实现高效本地视频图片压缩:完整指南与实战技巧
如何利用CompressO实现高效本地视频图片压缩:完整指南与实战技巧 【免费下载链接】compressO Convert any video/image into a tiny size. 100% free & open-source. Available for Mac, Windows & Linux. 项目地址: https://gitcode.com/gh_mirrors/co/c…...

图像矢量化工具深度解析:从位图到完美SVG的智能转换方案
图像矢量化工具深度解析:从位图到完美SVG的智能转换方案 【免费下载链接】vectorizer Potrace based multi-colored raster to vector tracer. Inputs PNG/JPG returns SVG 项目地址: https://gitcode.com/gh_mirrors/ve/vectorizer 在现代数字设计工作流中&…...

springAI中tools的使用
1.使用Tool注解注册toolTool(description "获取当前日期和时间,当用户询问时间、日期时调用。")public String getCurrentDateTime() {log.info("tools调用获取时间");return LocalDateTime.now().format(DateTimeFormatter.ofPattern("y…...