EtherCAT运动控制器上位机开发之Python+Qt(三):PDO配置与SDO读写
ZMC408CE控制器硬件介绍
ZMC408CE是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。

ZMC408CE支持8轴运动控制,最多可扩展至32轴,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。
ZMC408CE支持PLC、Basic、HMI组态三种编程方式。PC上位机API编程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC408CE支持8轴运动控制,可采用脉冲轴(带编码器反馈)或EtherCAT总线轴,通用IO包含24路输入口和16路输出口,部分IO为高速IO,模拟量AD/DA各两路,EtherCAT最快125us的刷新周期。
ZMC408CE支持8个通道的硬件比较输出、硬件定时器、运动中精准输出,还支持8通道PWM输出,对应的输出口为OUT0-7,支持8个通道同时触发硬件比较输出。
PCIE464M控制卡硬件介绍
PCIE464M是一款基于PCIe的PCI Express的EtherCAT总线运动控制卡,具有多项实时和高精度运动控制控制功能。

用户可直接将PCIE464M嵌入标准PC机实现高性能的EtherCAT运动控制功能,实现高精多轴同步控制,EtherCAT控制周期最小可达100us!
PCIE464M内置多路高速IO输入输出,可满足用户的多样化高速IO应用需求,如:高速色标锁存、高速PWM、多维位置比较输出PSO、视觉飞拍、速度前瞻、编码器位置检测等应用。

PCIE464M运动控制卡上自带16进16出,第三方图像处理工控机或PC无需额外配置IO数据采集卡和PLC,即可实现IPC形态的机器视觉运动控制一体机,简化硬件架构,节省成本,软硬件一体化。
ECI2A18B控制卡硬件介绍
ECI2A18B是正运动推出的一款高性价比10轴脉冲型、模块化的网络型运动控制卡,采用优化的网络通讯协议可以实现实时的运动控制,同时支持多种通信协议,方便与其他工业控制设备连接和集成。安装配置相对便捷,适合于模块化和灵活性要求较高的控制系统。

ECI2A18B控制卡最大可扩展至12脉冲轴,支持8路高速输入和4路高速输出,集成丰富的运动控制功能,包含多轴点位运动、电子凸轮,直线插补,圆弧插补,连续插补运动等,满足多样化的工业应用需求。

ECI2A18B运动控制卡可用于电子半导体设备(检测类设备、组装类设备、锁附类设备、焊锡机)、点胶设备和流水线等10轴以内脉冲的高性价比应用场合。
一、Python+Qt开发流程
Python+Qt运动控制开发流程参考“EtherCAT运动控制器上位机之Python+Qt(一):链接与单轴运动”。
二、相关PC函数介绍
1.PC函数手册可在光盘资料查看,具体路径如下。

2.连接控制器。

3.下载bas文件到控制器。

4.下载zar文件到控制器。

5.SDO写入。

6.SDO读取。

7.读取轴类型。

8.设置轴使能。

9.设置脉冲当量。

10.单轴持续运动。

三、例程演示
1.连接控制器。
#连接控制器, 控制器默认IP是192.168.0.11,此处使用comboBox内输入的ip
def on_btn_open_clicked(self):strtemp = self.ui.comboBox.currentText()print("当前的ip是 :", strtemp)if self.Zmc.handle.value is not None:self.Zmc.ZAux_Close()self.time1.stop()self.ui.setWindowTitle("单轴运动")iresult = self.Zmc.ZAux_OpenEth(strtemp)#连接控制器if 0 != iresult:QMessageBox.warning(self.ui, "提示", "连接失败")else:QMessageBox.warning(self.ui, "提示", "连接成功")str_title = self.ui.windowTitle() + strtempself.ui.setWindowTitle(str_title)self.Up_State() #刷新函数self.time1.start(100)#开启定时器
2.下载BAS文件到控制器。
#下载BAS文件到控制器
def on_btn_down_bas_clicked(self): # 下载BAS文件到控制器if self.Zmc.handle.value is None:QMessageBox.warning(self.ui, "提示", "未连接控制器")returnfile_Date = QFileDialog.getOpenFileName(self.ui, "选择BAS文件", "..", "Files(*.bas)")self.file_Name = file_Date[0].replace("/", "\\")print(self.file_Name)self.ui.textEdit_file_path.insertPlainText(self.file_Name + "\n")# 读取BAS文件中的变量判断是否有加载BAS文件temp = self.Zmc.ZAux_Direct_GetUserVar("BUS_TYPE")[1].value self.Bus_type = float(temp)# BAS文件下载到ROMret = self.Zmc.ZAux_BasDown(self.file_Name, 1) if ret != 0:QMessageBox.warning(self.ui, "提示", "文件下载失败!" + "错误码为 :%1 ".format(ret))
3.下载ZAR文件到控制器。
#下载ZAR文件到控制器
def on_btn_down_zar_clicked(self): # 下载zar件到控制器if self.Zmc.handle.value is None:QMessageBox.warning(self.ui, "提示", "未连接控制器")returnfile_Date = QFileDialog.getOpenFileName(self.ui, "选择zar文件", "..", "Files(*.zar)")self.file_Name = file_Date[0].replace("/", "\\")print(self.file_Name)self.ui.textEdit_file_path.insertPlainText(self.file_Name + "\n")# 读取zar文件中的变量判断是否有加载zar文件temp = self.Zmc.ZAux_Direct_GetUserVar("BUS_TYPE")[1].valueself.Bus_type = float(temp)# zar文件下载到ROMret = self.Zmc.ZAux_ZarDown(self.file_Name, 1)if ret != 0:QMessageBox.warning(self.ui, "提示", "zar文件下载失败!" + "错误码为 :%1 ".format(ret))
4.SDO写入数据。
#SDO写入数据
def on_btn_Ecat_write_clicked(self): # ETHERCAT写if self.Zmc.handle.value is None:QMessageBox.warning(self.ui, "提示", "未连接控制器")return#节点编号m_sdo_node1 = int(self.ui.edit_node_1.text())# 对象字典编号m_sdo_index1 = int(self.ui.edit_dir_1.text())# 对象字典子编号m_sdo_sub1 = int(self.ui.edit_sub_node_1.text())# 数据类型m_sdo_type1 = self.ui.comboBox_type_1.currentIndex() + 1#写入数据字典值的数据值 m_sdo_data1 = int(self.ui.edit_date_1.text())if self.Bus_type == 0:#SDO写入ret = self.Zmc.ZAux_BusCmd_SDOWrite(0, m_sdo_node1, m_sdo_index1, m_sdo_sub1, m_sdo_type1, m_sdo_data1)if ret != 0:QMessageBox.warning(self.ui, "提示", "写入失败")returnelse:QMessageBox.warning(self.ui, "提示", "非ETHERCAT模块")return
5.SDO读取数据。
#SDO读取数据
def on_btn_Ecat_read_clicked(self): # ETHERCAT读取if self.Zmc.handle.value is None:QMessageBox.warning(self.ui, "提示", "未连接控制器")return#节点编号m_sdo_node2 = int(self.ui.edit_node_2.text())#对象字典编号m_sdo_index2 = int(self.ui.edit_dir_2.text())#对象字典子编号m_sdo_sub2 = int(self.ui.edit_sub_node_2.text())#数据类型m_sdo_type2 = self.ui.comboBox_type_2.currentIndex() + 1m_sdo_data2 = ctypes.c_int(0)print(self.Bus_type)if self.Bus_type == 0:#通过设备号和槽位号进行 SDO 读取。ret = self.Zmc.ZAux_BusCmd_SDORead(0, m_sdo_node2, m_sdo_index2, m_sdo_sub2, m_sdo_type2)#读取的数据值m_sdo_data2 = int(ret[1].value)if ret != 0:QMessageBox.warning(self.ui, "提示", "读取失败")returnself.ui.edit_date_2.setText(str(m_sdo_data2))else:QMessageBox.warning(self.ui, "提示", "非ETHERCAT模块")return
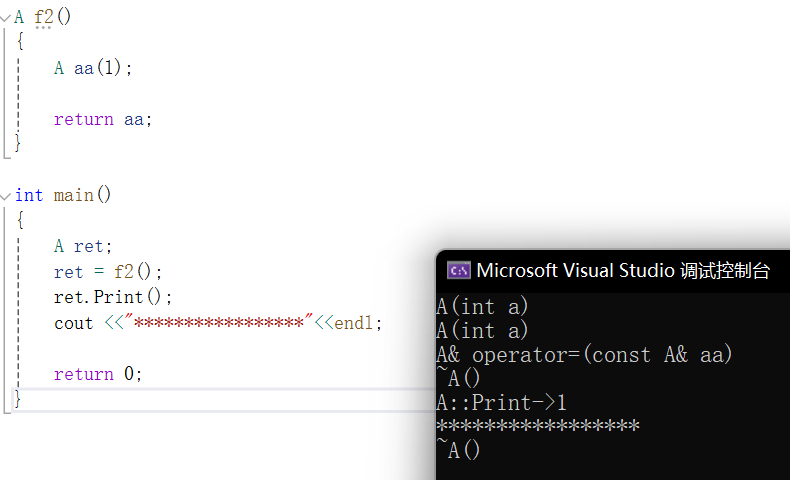
四、运行效果
运行python程序,通过RTSys软件观察运行情况。

通过驱动器软件查看sdo读写情况(对象字典为10进制数据):此处以雷赛驱动为例读写驱动器SDO。
1.SDO_READ读取驱动器SDO参数,比如先在驱动器软件设置单圈脉冲数量为5000后,通过SDO_READ读取驱动器单圈脉冲数。

2.SDO_WRITE写入驱动器SDO参数,比如使用SDO_WRITE写入单圈脉冲数量为10000后,通过驱动器软件查看修改结果。

五、总线初始化bas文件
总线初始化BAS文件下载到控制器ROM里面掉电保存。
1.EtherCAT总线扩展接线
每个EIO扩展模块在扩展接线完成后,不需要进行进行二次开发,只需手动在EtherCAT主站控制器配置扩展模块唯一的IO地址和轴地址,配置完成即可访问。
IO地址编号通过总线指令NODE_IO来设置,控制器上程序只需通过IO编号就可以访问到扩展模块上的资源。轴地址的配置使用AXIS_ADDRESS指令映射绑定轴号,绑定完成通过BASE或AXIS指令指定轴号。
接线时注意EtherCAT IN连接上一级模块,EtherCAT OUT连接下一级模块,IN和OUT口不可混用。

上图涉及的编号概念如下;总线相关指令参数会用到如下编号:
1)槽位号(slot):
槽位号是指控制器上总线接口的编号,EtherCAT总线槽位号为0。
2)设备号(node):
设备号是指一个槽位上连接的所有设备的编号,从0开始,按设备在总线上的连接顺序自动编号,可以通过NODE_COUNT(slot)指令查看总线上连接的设备总数。
3)驱动器编号:
控制器会自动识别出槽位上的驱动器,编号从0开始,按驱动器在总线上的连接顺序自动编号。
驱动器编号与设备号不同,只给槽位上的驱动器设备编号,其他设备忽略,映射轴号时将会用到驱动器编号。
2.EtherCAT总线扩展资源映射
1)IO映射
控制器上程序只需通过IO编号就可以访问到扩展模块上的资源,EtherCAT总线扩展模块IO编号通过总线指令NODE_IO来设置,同时配置输入和输出。
IO映射时先查看控制器自身的最大IO编号(包括外部IO接口和脉冲轴内的接口),再使用指令设置。
若扩展的IO与控制器自身IO编号重合,二者将同时起作用,所以IO映射的映射的编号在整个控制系统中均不得重复。
IO映射语法:
NODE_IO(slot,node)=iobase
slot:槽位号,0-缺省
node:设备编号,编号从0开始
iobase:映射IO起始编号,设置结果只会是8的倍数
2)轴映射
扩展模块的轴使用前需要使用AXIS_ADDRESS指令映射轴号,轴映射也需要注意整个系统的轴号不得重复。EIO系列扩展轴的映射与总线驱动器的轴映射语法相同。
轴映射语法:
AXIS_ADDRESS(轴号)=(槽位号<<16)+驱动器编号+1
3.总线初始化BAS程序
'********************************ECAT总线初始化***********************
global CONST BUS_TYPE = 0 '总线类型。可用于上位机区分当前总线类型
global CONST Bus_Slot = 0 '槽位号0(单总线控制器缺省0)
global CONST PUL_AxisStart = 0 '本地脉冲轴起始轴号
global CONST PUL_AxisNum = 0 '本地脉冲轴轴数量
global CONST Bus_AxisStart = 0 '总线轴起始轴号
global CONST Bus_NodeNum = 1 '总线配置节点数量,用于判断实际检测到的从站数量是否一致
global MAX_AXISNUM '最大轴数
MAX_AXISNUM = SYS_ZFEATURE(0)
global Bus_InitStatus '总线初始化完成状态
Bus_InitStatus = -1
global Bus_TotalAxisnum '检查扫描的总轴数
delay(3000) '延时3S等待驱动器上电,不同驱动器自身上电时间不同,具体根据驱动器调整延时
?"总线通讯周期:",SERVO_PERIOD,"us"
Ecat_Init() '初始化ECAT总线
while (Bus_InitStatus = 0)Ecat_Init()
wend
'*****************ECAT总线初始********************************************************************
'初始流程: slot_scan(扫描总线) -> 从站节点映射轴/io -> SLOT_START(启动总线) -> 初始化成功
'**************************************************************************************************
global sub Ecat_Init()local Node_Num,Temp_Axis,Drive_Vender,Drive_Device,Drive_AliasRAPIDSTOP(2)for i=0 to MAX_AXISNUM - 1 '初始化还原轴类型 AXIS_ENABLE(i) = 0atype(i)=0 AXIS_ADDRESS(i) =0DELAY(10) '防止所有驱动器全部同时切换使能导致瞬间电流过大nextBus_InitStatus = -1Bus_TotalAxisnum = 0 SLOT_STOP(Bus_Slot) delay(200)slot_scan(Bus_Slot) '扫描总线if return then ?"总线扫描成功","连接从站设备数:"NODE_COUNT(Bus_Slot)if NODE_COUNT(Bus_Slot) <> Bus_NodeNum then '判断总线检测数量是否为实际接线数量?"扫描节点数量与程序配置数量不一致!" ,"配置数量:"Bus_NodeNum,"检测数量:"NODE_COUNT(Bus_Slot)Bus_InitStatus = 0 '初始化失败。报警提示endif '"开始映射轴号"for Node_Num=0 to NODE_COUNT(Bus_Slot)-1 '遍历扫描到的所有从站节点Drive_Vender = NODE_INFO(Bus_Slot,Node_Num,0) '读取驱动器厂商Drive_Device = NODE_INFO(Bus_Slot,Node_Num,1) '读取设备编号Drive_Alias = NODE_INFO(Bus_Slot,Node_Num,3) '读取设备拨码IDif NODE_AXIS_COUNT(Bus_Slot,Node_Num) <> 0 then '判断当前节点是否有电机'根据节点带的电机数量循环配置轴参数(针对一拖多驱动器)for j=0 to NODE_AXIS_COUNT(Bus_Slot,Node_Num)-1 Temp_Axis = Bus_AxisStart + Bus_TotalAxisnum '轴号按NODE顺序分配'Temp_Axis = Drive_Alias '轴号按驱动器设定的拨码分配(一拖多需要特殊处理) base(Temp_Axis)AXIS_ADDRESS(Temp_Axis)= (Bus_Slot<<16)+ Bus_TotalAxisnum + 1 '映射轴号ATYPE=65 '设置控制模式 65-位置 66-速度 67-转矩 DRIVE_PROFILE=0Sub_SetPdo(Node_Num,Drive_Vender,Drive_Device) '设定PDO参数'映射驱动器IO IO映射到控制器IO32-以后每个驱动器间隔32点Sub_SetDriverIo(Drive_Vender,Temp_Axis,32 + 32*Temp_Axis) Sub_SetNodePara(Node_Num,Drive_Vender,Drive_Device,j) '设置特殊总线参数disable_group(Temp_Axis) '每轴单独分组Bus_TotalAxisnum=Bus_TotalAxisnum+1 '总轴数+1nextelse 'IO扩展模块Sub_SetNodeIo(Node_Num,Drive_Vender,Drive_Device,32 + 32*Node_Num)'映射扩展模块IO endifnext?"轴号映射完成","连接总轴数:"Bus_TotalAxisnumwa 200SLOT_START(Bus_Slot) '启动总线if return then wdog=1 '使能总开关for i= Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1 BASE(i)DRIVE_CLEAR(0)DELAY 50'?"驱动器错误清除完成"datum(0) '清除控制器轴状态错误"wa 100 '"轴使能"AXIS_ENABLE=1nextBus_InitStatus = 1?"轴使能完成"'本地脉冲轴配置for i = 0 to PUL_AxisNum - 1base(PUL_AxisStart + i)AXIS_ADDRESS = (-1<<16) + iATYPE = 4next?"总线开启成功" else?"总线开启失败"Bus_InitStatus = 0endif else?"总线扫描失败"Bus_InitStatus = 0endif
end sub
'*********************************从站节点特殊参数配置*******************************************
'通过SDO方式修改对应对象字典的值修改从站参数(具体对象字典查看驱动器手册)
'**************************************************************************************************
global sub Sub_SetNodePara(iNode,iVender,iDevice,Iaxis)if iVender = $41B and iDevice = $1ab0 then '正运动24088脉冲扩展轴SDO_WRITE(Bus_Slot,iNode,$6011+Iaxis*$800,0,5,4) '设置扩展脉冲轴ATYPE类型SDO_WRITE(Bus_Slot,iNode,$6012+Iaxis*$800,0,6,0) '设置扩展脉冲轴INVERT_STEP脉冲输出模式NODE_IO(Bus_Slot,iNode) = 32 + 32*iNode '设置240808上IO的起始映射地址 elseif iVender = $66f then '松下驱动器SDO_WRITE(Bus_Slot,iNode,$3741,0,3,0) '以拨码为IDSDO_WRITE(Bus_Slot,iNode,$3401,0,4,$10101) '正限位电平 $818181SDO_WRITE(Bus_Slot,iNode,$3402,0,4,$20202) '负限位电平 $828282SDO_WRITE(Bus_Slot,iNode,$6091,1,7,1) '齿轮比SDO_WRITE(Bus_Slot,iNode,$6091,2,7,1) SDO_WRITE(Bus_Slot,iNode,$6092,1,7,10000) '电机一圈脉冲数SDO_WRITE(Bus_Slot,iNode,$607E,0,5,224) '电机方向0 反转224 SDO_WRITE(Bus_Slot,iNode,$6085,0,7,4290000000) '异常减速度'SDO_WRITE(Bus_Slot,iNode,$1010,1,7,$65766173) '写EPPROM(写EPPROM后驱动器需要重新上电)'?"写EPPR0M OK 请断电重启" elseif iVender = $100000 then '汇川驱动器SDO_WRITE(Bus_Slot,iNode,$6091,1,7,1) '齿轮比SDO_WRITE(Bus_Slot,iNode,$6091,2,7,1) endif
end sub
4.BAS总线初始化关键函数
1)SLOT_SCAN – 总线扫描

2)AXIS_ADDRESS – 轴地址设置

3)DRIVE_PROFILE – 驱动器PDO设置

4)SDO_READ – 数据字典读取

5)SDO_WRITE – 数据字典写入

5.教学视频
PDO配置与SDO读写
本次,正运动技术EtherCAT运动控制器上位机开发之Python+Qt(三):PDO配置与SDO读写,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
相关文章:
EtherCAT运动控制器上位机开发之Python+Qt(三):PDO配置与SDO读写
ZMC408CE控制器硬件介绍 ZMC408CE是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。 ZMC408CE支持8轴运动控制,最多可扩展…...
)
MyBatis源码系列1(使用JDBC查询数据)
使用原生jdbc进行查询数据步骤. 1、加载驱动2、获取数据库连接3、创建Statement对象4、占位符赋值5、执行脚本6、解析结果7、关闭资源 代码示例 public class T0 {public static void main(String[] args) throws Exception {String sql "SELECT id,name FROM goods WH…...

【微服务】Nacos配置中心和客户端数据同步模式
一、Nacos概述 Nacos是一个更易于构建云原生应用的动态服务发现、配置管理和服务管理平台。它提供了一组简单易用的特性集,帮助用户快速实现动态服务发现、服务配置、服务元数据及流量管理。 二、数据同步模式 1. 实时同步 Push模式:在服务端的配置信…...

WebRTC音视频开发读书笔记(六)
数据通道不仅可以发送文本消息, 还可以发送图片、二进制文件,将其类型binaryType属性设置成arraybuffer类型即可. 九\、文件传输 1、文件传输流程 (1)使用表单file打开本地文件 (2)使用FileReader读取文件的二进制数据 &#…...

高级列表组件ReList
高级列表组件ReList 组件实现基于 Vue3 Element Plus Typescript,同时引用 vueUse lodash-es tailwindCss (不影响功能,可忽略) 主要基于JSX风格实现高度动态的列表渲染组件,可以通过信息配置Metas配置控制信息项展示,同时支持…...

Vxe UI vue vxe-table 实现表格数据分组功能,根据字段数据分组
Vxe UI vue vxe-table 实现表格数据分组功能,根据字段数据分组 实现数据分组功能 基于树结构功能就可以直接实现数据分组功能,代码如下: <template><div><vxe-button status"primary" click"listToGroup()&…...

oracle创建账户
1、查看表空间 SELECT tablespace_name FROM user_tablespaces;2、创建用户 CREATE USER FLINKCDC2 IDENTIFIED BY "123456";也可以使用指定表空间的方式 CREATE USER FLINKCDC2 IDENTIFIED BY "123456" DEFAULT TABLESPACE LOGMINER_TBS QUOTA UNLIMIT…...

2024新型数字政府综合解决方案(五)
新型数字政府综合解决方案通过集成人工智能、大数据、区块链和云计算技术,打造了一个智能化、透明化和高效的政务服务平台,旨在提升政府服务的响应速度、处理效率和数据安全性。该方案实现了跨部门的数据共享与实时更新,通过智能化的流程自动…...

datawind可视化查询-其他函数
飞书文档学习链接:https://www.volcengine.com/docs/4726/47275 1. 用户名函数 用户名函数并非 ClickHouse 官方函数,而是与项目用户信息相结合,用于返回当前使用用户的指定信息的函数。 USERNAME()可返回当前用户的用户名,如下所示。该函数也可与其他函数组合使用 2. J…...

数据库MySQL之事务、索引
目录 1.概述 2.事务 3.索引 3.1索引结构 3.2操作语法 1.概述 场景:假如我们需要解散教学部,那么该部门下的所有员工都需要删除。如果教学部成功删除了,但员工出于某些原因(比如SQL语句写错了等)并没有删除,此时就会出现数据…...

AI学习记录 - transformers的decoder和encoder中的自注意力矩阵和掩码矩阵的数据处理
掩码掩码,指的是掩盖住后面的词汇的词向量对我当前词汇造成影响。把PAD字符设置成负无穷大,概念上不叫掩码,只是计算方式和掩码一样。 怎么生成掩码,在非掩码注意力矩阵中,把PAD词向量每个维度设置成负无穷大…...

【Solidity】代币
ERC20 ERC-20 全称 “Ethereum Request for Comment 20”,是一种标准接口,用于实现代币合约。ERC20 标准定义了一组函数和事件,使得代币可以在不同的应用和平台之间互操作。 ERC20 标准接口定义了一组必须实现的函数和事件: in…...

5 - Linux YUM仓库及NFS共享服务
目录 一、YUM概述 1.YUM简介 2.软件仓库的提供方式 3.RPM软件包的来源 4. yum 命令的运用 二、搭建ftp YUM仓库 三、NFS共享服务 1.NFS简述 2.模拟NFS 一、YUM概述 1.YUM简介 YUM(Yellow dog Updater Modified)是一个专门为了解决包的依赖关系…...

上传文件,文件类型限制语法,各种媒体视频文件的Content-Type
各种媒体视频文件的Content-Type “application/x-apple-diskimage”: “DMG”, “application/epubzip”: “EPUB”, “application/java-archive”: “JAR”, “video/x-matroska”: “MKV”, “text/html”: “HTML|HTM”, “text/css”: “CSS”, “text/javascript…...
类和对象(下)(2)
类和对象(下)(2) static成员 • ⽤static修饰的成员变量,称之为静态成员变量,静态成员变量⼀定要在类外进⾏初始化。 • 静态成员变量为当前类的所有对象所共享,不属于某个具体的对象,不存在对象中&#…...

软件测试 - 自动化测试(概念)(Java)(自动化测试分类、web自动化测试、驱动、selenium自动化测试工具的安装)
一、自动化的概念 ⾃动洒⽔机,主要通上⽔就可以⾃动化洒⽔并且可以⾃动的旋转。 ⾃动洗⼿液,免去了⼿动挤压可以⾃动感应出洗⼿液 超市⾃动闸⻔,不需要⼿动的开⻔关⻔ ⽣活中的⾃动化案例有效的减少了⼈⼒的消耗,同时也提⾼了⽣…...

wpf datagrid 实现双向绑定
前台 <DataGridAutoGenerateColumns"False"Background"White"CanUserAddRows"True"Grid.Row"1"RowEditEnding"DataGrid_OnRowEditEnding"RowHeight"60"SelectionUnit"CellOrRowHeader"x:Name"…...

使用循环在el-select下拉框中循环出-3至50
问: 使用循环在el-select下拉框中循环出-3至50 回答: <el-form-itemprop"adPosition"label"广告位置":rules"{required: true, message: 广告位置不能为空, trigger: change}" ><el-select v-model"addDataForm.adPosition"…...

全球海事航行通告解析辅助决策系统
“全球海事航行通告解析辅助决策系统”是一个针对海事行业设计的智能系统,旨在帮助海上导航和航运操作人员解析和应对全球发布的海事航行通告。 要做这样的系统我们必须要了解海事签派员的日常工作。 海事签派员,也称为船舶操作员或船运调度员࿰…...

Spring 解决bean的循环依赖
Spring循环依赖-博客园 1. 什么是循环依赖 2. 循环依赖能引发什么问题 循环依赖可能引发以下问题: 初始化顺序不确定:循环依赖导致无法确定哪个对象应该先被创建和初始化,从而造成初始化顺序的混乱。这可能导致错误的结果或意外的行为。死…...
Vue3 + Element Plus + TypeScript中el-transfer穿梭框组件使用详解及示例
使用详解 Element Plus 的 el-transfer 组件是一个强大的穿梭框组件,常用于在两个集合之间进行数据转移,如权限分配、数据选择等场景。下面我将详细介绍其用法并提供一个完整示例。 核心特性与用法 基本属性 v-model:绑定右侧列表的值&…...
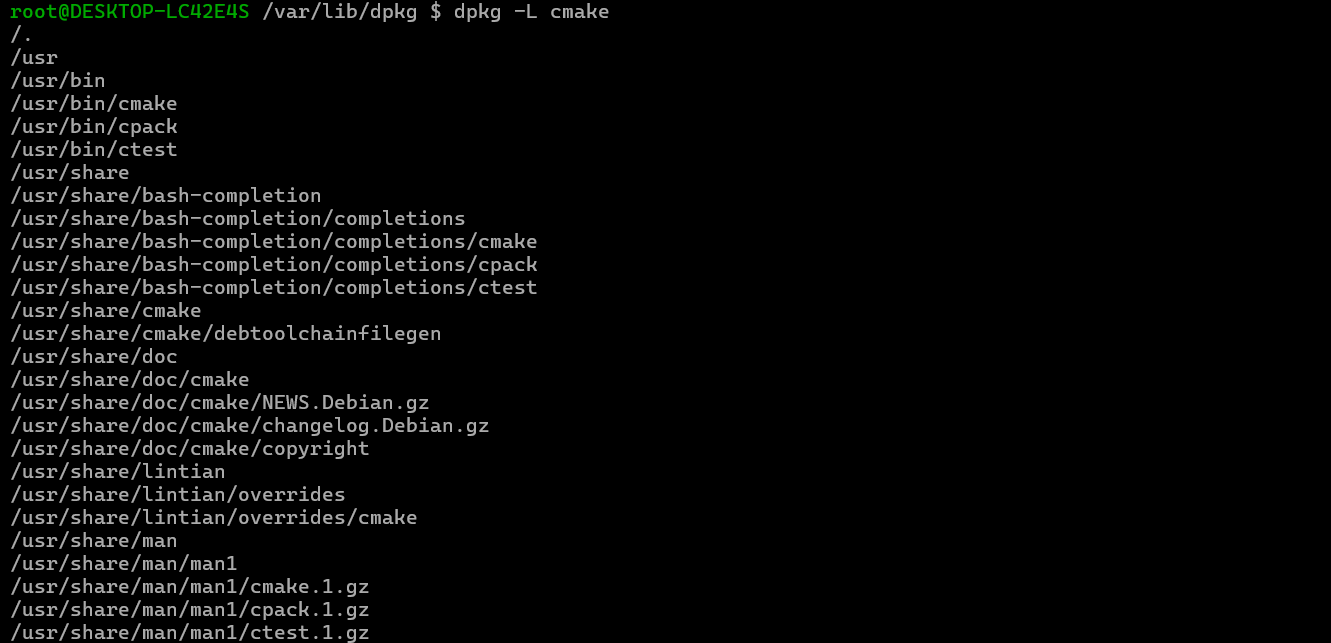
Debian系统简介
目录 Debian系统介绍 Debian版本介绍 Debian软件源介绍 软件包管理工具dpkg dpkg核心指令详解 安装软件包 卸载软件包 查询软件包状态 验证软件包完整性 手动处理依赖关系 dpkg vs apt Debian系统介绍 Debian 和 Ubuntu 都是基于 Debian内核 的 Linux 发行版ÿ…...
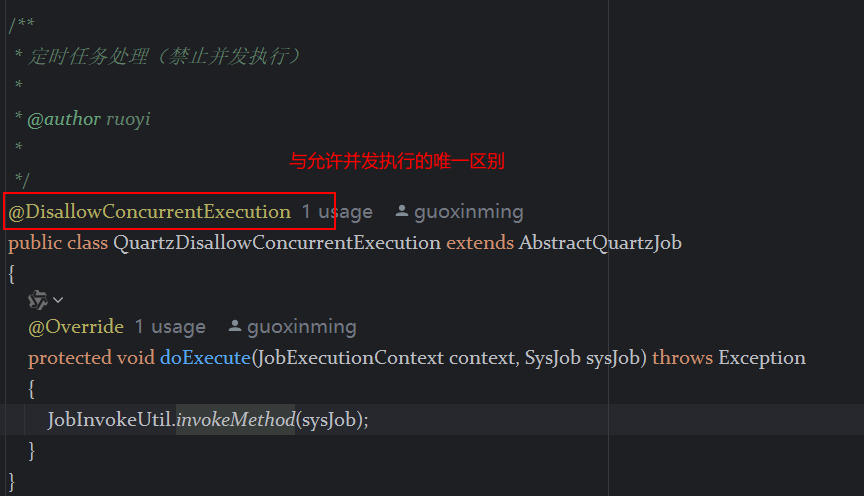
定时器任务——若依源码分析
分析util包下面的工具类schedule utils: ScheduleUtils 是若依中用于与 Quartz 框架交互的工具类,封装了定时任务的 创建、更新、暂停、删除等核心逻辑。 createScheduleJob createScheduleJob 用于将任务注册到 Quartz,先构建任务的 JobD…...

【决胜公务员考试】求职OMG——见面课测验1
2025最新版!!!6.8截至答题,大家注意呀! 博主码字不易点个关注吧,祝期末顺利~~ 1.单选题(2分) 下列说法错误的是:( B ) A.选调生属于公务员系统 B.公务员属于事业编 C.选调生有基层锻炼的要求 D…...
ardupilot 开发环境eclipse 中import 缺少C++
目录 文章目录 目录摘要1.修复过程摘要 本节主要解决ardupilot 开发环境eclipse 中import 缺少C++,无法导入ardupilot代码,会引起查看不方便的问题。如下图所示 1.修复过程 0.安装ubuntu 软件中自带的eclipse 1.打开eclipse—Help—install new software 2.在 Work with中…...

laravel8+vue3.0+element-plus搭建方法
创建 laravel8 项目 composer create-project --prefer-dist laravel/laravel laravel8 8.* 安装 laravel/ui composer require laravel/ui 修改 package.json 文件 "devDependencies": {"vue/compiler-sfc": "^3.0.7","axios": …...

重启Eureka集群中的节点,对已经注册的服务有什么影响
先看答案,如果正确地操作,重启Eureka集群中的节点,对已经注册的服务影响非常小,甚至可以做到无感知。 但如果操作不当,可能会引发短暂的服务发现问题。 下面我们从Eureka的核心工作原理来详细分析这个问题。 Eureka的…...
以光量子为例,详解量子获取方式
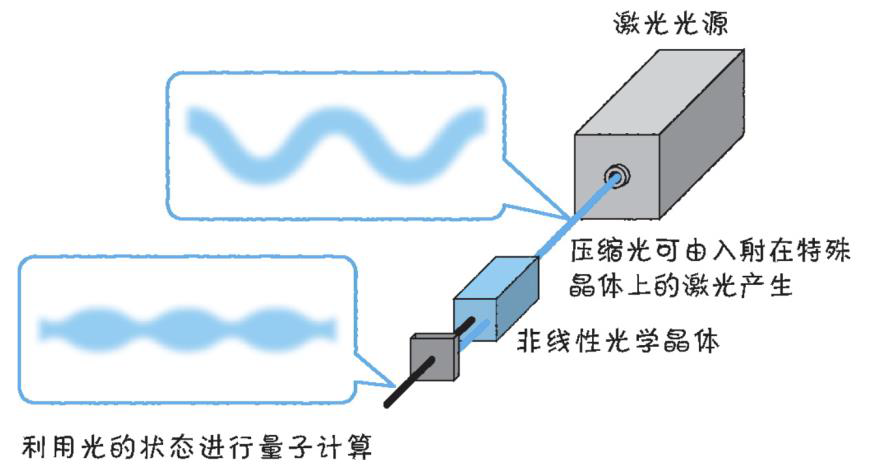
光量子技术获取量子比特可在室温下进行。该方式有望通过与名为硅光子学(silicon photonics)的光波导(optical waveguide)芯片制造技术和光纤等光通信技术相结合来实现量子计算机。量子力学中,光既是波又是粒子。光子本…...

智能AI电话机器人系统的识别能力现状与发展水平
一、引言 随着人工智能技术的飞速发展,AI电话机器人系统已经从简单的自动应答工具演变为具备复杂交互能力的智能助手。这类系统结合了语音识别、自然语言处理、情感计算和机器学习等多项前沿技术,在客户服务、营销推广、信息查询等领域发挥着越来越重要…...

视觉slam十四讲实践部分记录——ch2、ch3
ch2 一、使用g++编译.cpp为可执行文件并运行(P30) g++ helloSLAM.cpp ./a.out运行 二、使用cmake编译 mkdir build cd build cmake .. makeCMakeCache.txt 文件仍然指向旧的目录。这表明在源代码目录中可能还存在旧的 CMakeCache.txt 文件,或者在构建过程中仍然引用了旧的路…...